Группа изобретений относится к области робототехники, а именно, к способам обработки листового материала, в частности, банкнот, чеков, ордеров или иных ценных бумаг (документов), с помощью автоматизированных счетно-сортировальных комплексов (которые также могут называться роботизированными комплексами, ячейками, системами, участками и т.п.), выполняющих сортировку, проверку установленным критериям (например, проверку подлинности) листового материала (банкнот), пересчет, обандероливание (упаковку) стопок листового материала, принятие в хранилище, и предназначенных для применения, в частности, в кассово-инкассаторских центрах.
Обычно перед обработкой листовой материал - ценные документы, в частности, банкноты, подготавливают к предстоящей обработке: данные о платеже считывают с идентификатора платежа (с идентификатора депозита, с жетона) и передают машине для обработки ценных документов, откуда информация поступает в хранилище. Данные о платеже могут включать информацию о плательщике, номере счета, номер транзакции и т.п. Затем листовой материал (банкноты) укладывают в загрузочные контейнеры, которые также называют паллетами, ящиками, лотками. Обычно укладку депозитов в загрузочные лотки (контейнеры) выполняет оператор, затем заполненные загрузочные лотки подают, например, по транспортировочному конвейеру, через входной шлюз роботизированного комплекса (ячейки) внутрь защитного ограждения, после чего листовой материал (банкноты) подается (обычно с помощью робота-манипулятора) на вход счетно-сортировальной машины (ССМ), выполняющей проверку установленным критериям (сортировку, проверку подлинности и т.п.), пересчет банкнот и формирование стопок банкнот по номиналу в рабочих карманах ССМ (для последующей обработки, обычно стопки формируются по 100 банкнот), а также формирование в кармане выгрузки стопок банкнот, не прошедших проверку установленным критериям и не принятых ССМ к пересчету. Сформированную в рабочем кармане ССМ обрабатываемую стопку банкнот перемещают (например, с помощью робота-манипулятора) в обандероливатель (упаковщик) корешков (корешок содержит 100 банкнот), которые, в свою очередь, затем могут быть упакованы в пачки по 10 корешков. Упакованные таким образом банкноты (листовой материал) затем перемещают (например, с помощью робота-манипулятора) в контейнеры (лотки, ящики) выгрузки, которые с помощью автоматического транспотировочного средства (например, транспортировочного конвейера) через выходной шлюз удаляются за пределы защитного ограждения из роботизированного комплекса (ячейки) для последующего направления обработанного листового материала (банкнот) в хранилище.
Корешком принято называть стопку, содержащую 100 банкнот (листов), которая прошла обвязку в обандероливателе (упаковщике корешков).
Шлюзом (или портом) обычно называют передаточное устройство, обеспечивающее перемещение листового материала (банкнот), включая идентификатор депозита (жетон).
Карманом ССМ называют отсек ССМ для размещения в нем листового материала (ценных документов, банкнот).
Загрузочным карманом ССМ называют отсек ССМ для загрузки в него пачки листового материала (банкнот), подлежащего проверке и пересчету в ССМ. Обычно загрузка осуществляется автоматически роботом-манипулятором.
Рабочим карманом ССМ называют отсек-накопитель ССМ для размещения листового материала (банкнот), прошедших проверку установленным критериям и пересчет в ССМ. Зачастую ССМ имеет не менее четырех рабочих карманов для размещения в каждом из них банкнот установленного типа и номинала. Выпускаются модели ССМ, имеющие 16 рабочих карманов. В рабочем кармане формируется стопка из 100 банкнот одного типа (например, одной валюты) и номинала.
Карманом выгрузки (возвратным карманом, карманом отбраковки) ССМ называют отсек-накопитель для размещения листового материала (банкнот), не прошедших проверку установленным критериям и не принятых ССМ к пересчету.
Следует отметить, что при перемещении между элементами роботизированного комплекса обрабатываемой стопки листов (банкнот), удерживаемой схватом робота-манипулятора, может произойти выпадение одного или даже нескольких листов (банкнот) из зажимных рабочих элементов робота-манипулятора. Как показывает практика, наиболее вероятна ситуация выпадения листа (банкноты) из зажимных рабочих элементов захватного устройства робота-манипулятора при перемещении роботом-манипулятором обрабатываемой стопки из рабочего кармана ССМ в обандероливатель (упаковщик) корешков. Выпадение (утеря) банкноты может произойти, например, в силу того, что банкнота в обрабатываемой стопке оказалась загнутой, ветхой, надорванной и т.п. и по этой причине не попала в область зажима между зажимными элементами (например, губками) захватного устройства робота-манипулятора. Выпавшая (утерянная) банкнота может быть обнаружена оператором, зачастую в конце смены после остановки работы роботизированного комплекса (ячейки), что вызовет необходимость повторной обработки всей партии листового материала (банкнот), которая прошла обработку в роботизированном комплексе за смену, так как обрабатываемая стопка, из которой выпала банкнота, проходит обвязку в обандероливателе наряду с полными стопками (стопками, из которых не происходило выпадение банкнот). Важно отметить, что полученный обандероленный корешок является неполным - в нем не достает выпавшей банкноты. Затем этот неполный корешок будет перемещен роботом-манипулятором (наравне с полными, корректно сформированными, корешками) в блок упаковки пачек (десять корешков упаковываются в одну пачку), которые робот-манипулятор затем переместит в лоток выгрузки, либо сразу в лоток выгрузки, а лоток выгрузки автоматически удаляется из комплекса через шлюз выгрузки для последующей доставки в хранилище. Если оператор получит сигнал об обнаружении выпавшей банкноты от автоматической системы слежения в режиме реального времени, то необходимо остановить работу комплекса, в том числе работу робота-манипулятора, войти внутрь защитного ограждения комплекса, изъять утерянную банкноту, после чего (в силу невозможности выявить -неполный корешок из общего объема корешков) заново обработать в роботизированном комплексе весь объем уже обработанных банкнот, предварительно распаковав обандероленные корешки и пачки и загрузив банкноты в загрузочные лотки. В обоих случаях значительно увеличивается время обработки листового материала (банкнот) и снижается эффективность (производительность) работы комплекса в целом.
Известен «Коллаборативный роботизированный участок пересчета денежной наличности» [патент №RU2697316C1, МПК G07D3/00, G07D13/00, дата публ. 13.08.2019], позволяющий автоматизировать процесс пересчета, сортировки и упаковки денежной наличности в кассово-инкассаторских центрах. Роботизированный участок (роботизированный комплекс) содержит платформу, на которой размещен коллаборативный робот-манипулятор с рабочим органом в виде захвата, обеспечивающий возможность перемещения банкнот (листового материала) между элементами участка. На платформе также расположена по меньшей мере одна счетно-сортировальная машина (ССМ), содержащая приемный карман, карман отбраковки (карман выгрузки) и сортировочные (рабочие) карманы. На платформе также размещены накопитель подачи паллет с денежной наличностью, накопитель сброса пустых паллет и упаковщики купюр (обандероливатели), обеспечивающие возможность обандероливания пачек купюр (т.е. формирования корешков банкнот). Элементы участка расположены в пределах рабочей зоны робота-манипулятора с обеспечением доступа к ним персонала без прекращения работы робота. Под рабочей зоной понимается расстояние от крайней точки захвата до основания манипулятора. Коллаборативный робот-манипулятор содержит блок управления и систему контроля работоспособности элементов участка.
Известен роботизированный комплекс для обработки листового материала [патент №RU2684120С1 «Система определения количества листового материала и проверки его подлинности», СПК G07D13/00, дата публ. 04.04.2019], который содержит устройство обработки листовых материалов (ЛМ), представляющее собой счетно-сортировальную машину (ССМ) и робот-манипулятор, которые установлены в защитном ограждающем корпусе (защитном ограждении) со шлюзами для приема и передачи листового материала (ЛМ), находящимися в рабочей зоне робота-манипулятора. ССМ содержит загрузочный карман, рабочие карманы, карман возврата. В ССМ выполняется распознавание и подсчет листового материала (в частности, банкнот), сортировка листового материала, по результатам которой ЛМ направляется в соответствующие рабочие карманы, также проводится проверка листового материала, по результатам которой ЛМ может быть помещен в карман возврата как не прошедший проверку и не принятый к пересчету ССМ. В состав роботизированного комплекса может входить несколько ССМ. Кроме того, в состав комплекса также входит автоматизированное транспортировочное средство для перемещения листового материала с картами-разделителями (идентификаторами депозита), средство видеонаблюдения, упаковщик (или обандероливатель), предназначенный для обвязывания бумажной лентой стоп банкнот определенного номинала (эта операция также называется «формирование корешков»). Робот-манипулятор выполнен с возможностью перемещения в обандероливатель сформированных в рабочем кармане ССМ стоп банкнот определенного номинала, а также извлечения и перемещения упакованного корешка в накопитель корешков соответствующего номинала (для формирования и обвязывания пачки; одну пачку составляют 10 корешков). Робот-манипулятор содержит систему технического зрения, обеспечивающую возможность обнаружения утерянных при перемещениях листовых материалов и наличия оставшегося листового материала после операций загрузки и выгрузки в карманах загрузки, сортировки, отбраковки, в обандероливателе и накопителе корешков. Робот-манипулятор выполнен с возможностью извлечения сформированных стоп из рабочих карманов ССМ и карт-разделителей с отбракованными листовыми материалами из кармана возврата ССМ, причем робот-манипулятор дополнительно выполнен с возможностью перемещения карт-разделителей и отбракованного листового материала в загрузочный карман ССМ для повторной обработки.
Известны способ и устройство для обработки денежных единиц, в частности, банкнот [патент США №US7997418B2 «Method and device for processing units of money», МПК G07F7/00, B07c5/00, дата публ. патента 16.08.2011]. Согласно известному способу и устройству, предназначенному для его осуществления, каждую банкноту перемещают из входного отсека в один из множества выходных отсеков в зависимости от предварительно определенных критериев сортировки. Работа устройства для обработки банкнот осуществляется с помощью системы управления, реализующей возможность задания требуемого количества банкнот определенного номинала и их выгрузки в выходные отсеки (лотки). Система управления оценивает сигналы различных блоков датчиков проверяющего устройства и проверяет их на соответствие заранее установленным критериям. Данные о желаемом количестве банкнот вводит оператор, причем спецификация предполагаемых приемников и количество банкнот одного номинала вводятся оператором во время первого (подготовительного) этапа обработки. Данный способ и устройство для его осуществления позволяют выполнить индивидуальную обработку стопки банкнот, состоящую из купюр различных номиналов. Однако известные технические решения нецелесообразно использовать для обработки непрерывного потока больших партий депозитов вследствие невысокой скорости обработки и необходимости участия оператора при выполнении ряда операций, что снижает скорость обработки и эффективность устройства.
Известна система для обработки банкнот [патент №RU2571193C2 «Ящик и система для обработки банкнот», МПК G07D9/00, дата публ. заявки 27.10.2014, дата публ. патента 20.12.2015], обеспечивающая возможность практически непрерывной обработки большого числа партий банкнот и содержащая транспортировочную систему для перемещения заполненных банкнотами ящиков к захвату и для перемещения опорожненных ящиков от него; банкнотообрабатывающую машину (счетно-сортировальную машину, или сокращенно - ССМ); промышленный робот (робот-манипулятор), захват которого предназначен для извлечения помещенных в ящик (лоток) банкнот. Захват управляется с помощью управляющего устройства, имеет гребенчатые структуры, входящие в углубления в разделительных элементах, открытых со стороны промежутков между ними. Согласованный с ящиком и его разделительными элементами захват обеспечивает возможность простого и надежного извлечения из ящика находящихся в нем банкнот. Захват имеет датчики для его позиционирования над разделительными элементами. С помощью известной системы обработка банкнот осуществляется следующим образом. Банкноты сначала подготавливают и помещают в лоток загрузки, который подается по транспортировочной системе к входному шлюзу. В транспортировочной системе может быть расположен вибратор для выравнивания положения банкнот, находящихся в лотках (банкноты должны касаться дна лотка одной из своих продольных кромок). Извлеченные из лотка захватом банкноты подаются в загрузочное отделение (карман) ССМ. Затем банкноты обрабатываются и подсчитываются в ССМ с использованием относящихся к ним сведений. Обработанные банкноты выкладываются в приемные отделения (рабочие карманы) ССМ. После извлечения всех банкнот из ящика (лотка) захватом пустой ящик транспортируется в зону рабочей поверхности и вновь готов к помещению в него банкнот оператором.
Следует отметить, что общим недостатком приведенных выше известных технических решений, относящихся к способам и системам обработки банкнот (листового материала), является то, что в них не предусмотрена возможность автоматического сбора (улавливания) банкнот, выпавших (утерянных) из захвата робота-манипулятора при перемещении пачки банкнот, например, из рабочего кармана ССМ в обандероливатель, а также последующего перемещения в отдельный накопитель выпавших банкнот и неполных корешков, что приводит к значительному увеличению времени обработки всей партии депозитов в случае выпадения отдельных банкнот, так как при обнаружении в конце смены выпавших купюр требуется распаковка и повторная обработка всей партии депозитов данной смены.
В качестве технического решения (прототипа), наиболее близкого по совокупности существенных признаков к заявляемому способу обработки листового материала, в частности, банкнот, предлагается выбрать «Способ определения количества листового материала и проверки его подлинности» [патент №RU2678904C1, МПК G07D7/00, дата публ. 04.02.2019], представляющий собой роботизированный способ пересчета, сортировки и проверки подлинности банкнот для использования в кассово-инкассаторских центрах.
Известный способ содержит этапы, на которых:
листовой материал (банкноты) с помощью автоматизированного средства, например, робота-манипулятора, перемещают в загрузочный карман устройства обработки банкнот, включающего блок транспортировки, с помощью которого листовой материал с картами-разделителями перемещают в блок распознавания и подсчета для распознавания и подсчета листового материала и считывания карт-разделителей,
после чего блок управления формирует управляющий сигнал сортировки,
затем листовой материал направляют согласно управляющему сигналу сортировки в соответствующие рабочие карманы, из которых с помощью робота-манипулятора выгружают сформированные стопки, а карты-разделители и отбракованный листовой материал направляют в карман возврата,
откуда с помощью робота-манипулятора карты-разделители и отбракованный листовой материал перемещают в загрузочный карман устройства обработки листовых материалов для повторной обработки,
сформированную в рабочем кармане устройства обработки листовых материалов стопку банкнот определенного номинала робот-манипулятор перемещает в упаковщик корешков для обвязывания корешка бумажной лентой,
после упаковки корешок с помощью робота-манипулятора извлекают и перемещают в накопитель корешков соответствующего номинала, где происходит формирование и обвязывание пачки,
с помощью системы технического зрения робота-манипулятора определяют и фиксируют утерянный при перемещениях листовой материал, а с помощью дополнительных камер технического зрения контролируют наличие оставшегося листового материала после операций загрузки и выгрузки в загрузочном кармане, карманах сортировки, кармане отбраковки, упаковщике корешков и накопителе корешков.
Расположение рабочих карманов, кармана возврата, упаковщика корешков и накопителя корешков может определяться роботом-манипулятором с использованием системы технического зрения. Количество рабочих карманов в устройстве обработки листовых материалов соответствует или больше количества обрабатываемых номиналов банкнот. Робот-манипулятор и устройство обработки листовых материалов устанавливают в защитный ограждающий корпус со шлюзами для приема и передачи листового материала, находящимися в рабочей зоне робота-манипулятора. В качестве робота-манипулятора может быть использован безопасный коллаборативный робот.
Однако следует отметить, что известный способ обработки листового материала (банкнот) хотя и предусматривает возможность определения выпавших (утерянных) при перемещении банкнот, но не предусматривает выполнение операции их автоматизированного захвата (подъема роботом-манипулятором) с последующим перемещением роботом-манипулятором выпавших банкнот и неполных корешков в отдельный накопитель, что позволило бы исключить повторный пересчет всей партии листового материала (банкнот) в рамках данной смены или данного депозита - в зависимости от настроек системы управления. При осуществлении известного способа при наличии утерянного (выпавшего из захвата робота-манипулятора) в процессе обработки партии листового материала (банкноты) потребуется повторная обработка (пересчет) всей партии листового материала, обработанного за смену, так как известный способ не предусматривает идентификации корешка, из которого указанный лист (банкнота) был утерян. Данное обстоятельство значительно увеличивает время обработки одной партии и снижает эффективность способа.
В качестве технического решения (прототипа), наиболее близкого по совокупности существенных признаков к заявляемому роботизированному комплексу для обработки банкнот, предлагается выбрать «Роботизированный счетно-сортировальный комплекс» по патенту №RU2622485C1 [МПК G07D13/00, B65H5/12, B65H29/00, дата публ. 15.06.2017], предназначенный для применения в автоматизированных кассово-инкассаторских центрах.
Известный роботизированный комплекс содержит:
корпус со шлюзами для приема и передачи через них лотков с банкнотами,
установленные внутри корпуса счетно-сортировальную машину (ССМ) и
по крайней мере один робот-манипулятор (РМ) с блоком управления и схватом,
РМ имеет возможность многократного перемещения и взаимодействия между карманами ССМ и лотками,
по крайней мере одну дополнительную ССМ, расположенную в зоне действия РМ с обеспечением минимальных рабочих перемещений последнего рядом с основной ССМ, и/или над основной, и/или вокруг робота-манипулятора,
корпус выполнен сборным в виде защитных панелей, соединенных друг с другом посредством стыковочных узлов и образующих по крайней мере один стыкуемый модуль.
Однако в качестве недостатка известного роботизированного комплекса следует отметить, что в его составе не предусмотрено наличие узла (системы) обнаружения листового материала (банкнот), выпавшего при перемещении роботом-манипулятором обрабатываемой стопки из рабочего кармана ССМ в упаковщик (обандероливатель) корешков, а также устройства (механизма), обеспечивающего возможность подбора (захватывания) выпавшего листа, и устройства (накопителя), обеспечивающего возможность накопления упомянутых выше выпавших листов (банкнот) и соответствующих неполных корешков.
Техническим результатом, на достижение которого направлена заявляемая группа изобретений, является расширение функциональных возможностей способа обработки листового материала (в частности, банкнот) и применяемого для осуществления этого способа роботизированного комплекса, а именно, обеспечение возможности улавливания листового материала, выпавшего из захватного устройства робота-манипулятора на этапе перемещения из рабочего кармана ССМ в обандероливатель (в связи с тем, что, как показывает практика, именно на этом этапе наиболее велика вероятность выпадения листового материала) с последующим обнаружением, перемещением и складированием выпавших листов (банкнот) и соответствующих неполных корешков в отдельном накопителе в автоматическом режиме (т.е. без остановки работы комплекса), что позволяет значительно сократить количество листового материала, подлежащего повторной обработке в роботизированном комплексе в случае утери листового материала на этапе перемещения из рабочего кармана ССМ в обандероливатель и повысить эффективность обработки листового материала.
Для достижения указанного выше технического результата предлагается способ обработки листового материала, в частности, банкнот, и роботизированный комплекс для осуществления предлагаемого способа обработки листового материала, в частности, банкнот.
Предлагаемый способ обработки листового материала (банкнот) в роботизированном комплексе содержит следующие этапы:
выполняется перемещение листового материала (ЛМ) из лотка загрузки в карман загрузки счетно-сортировальной машины (ССМ) с помощью робота-манипулятора (РМ);
в счетно-сортировальной машине выполняется проверка установленным критериям (в частности, проверка подлинности, вид валюты, номинал) и пересчет листового материала;
в по меньшей мере одном рабочем кармане счетно-сортировальной машины осуществляется формирование обрабатываемой стопки листового материала, после чего осуществляются следующие этапы обработки упомянутой стопки листового материала:
осуществляется перемещение сформированной в рабочем кармане счетно-сортировальной машины обрабатываемой стопки листового материала из рабочего кармана счетно-сортировальной машины в обандероливатель с помощью робота-манипулятора при одновременном обеспечении возможности улавливания листового материала, выпавшего из обрабатываемой стопки при выполняемом перемещении, с помощью механизма сбора листового материала;
выполняется обвязывание обрабатываемой стопки листового материала в обандероливателе с формированием корешка листового материала;
осуществляется проверка наличия листового материала, выпавшего из обрабатываемой стопки листового материала при ее перемещении роботом-манипулятором из рабочего кармана счетно-сортировальной машины в обандероливатель, на рабочей поверхности механизма сбора листового материала, по результатам которой осуществляются следующие действия:
при отсутствии листового материала на рабочей поверхности механизма сбора листового материала осуществляется перемещение с помощью робота-манипулятора сформированного корешка листового материала в накопитель корректно сформированных корешков, после чего осуществляется проверка наличия в рабочем кармане счетно-сортировальной машины следующей сформированной обрабатываемой стопки листового материала;
при наличии листового материала на рабочей поверхности механизма сбора листового материала осуществляется перемещение с помощью робота-манипулятора обнаруженного листового материала и сформированного корешка листового материала в накопитель неполных корешков и выпавшего листового материала;
затем осуществляется повторная проверка наличия листового материала на рабочей поверхности механизма сбора листового материала, по результатам которой:
при наличии листового материала на рабочей поверхности осуществляется его перемещение в накопитель неполных корешков и выпавшего листового материала,
а при отсутствии листового материала на рабочей поверхности осуществляется проверка наличия в рабочем кармане счетно-сортировальной машины следующей сформированной обрабатываемой стопки листового материала,
причем выполнение каждой следующей повторной проверки наличия листового материала на рабочей поверхности осуществляется, если результатом предыдущей проверки являлось наличие листового материала на рабочей поверхности;
по результатам проверки наличия в рабочем кармане счетно-сортировальной машины следующей сформированной обрабатываемой стопки листового материала осуществляются следующие действия:
при наличии в рабочем кармане счетно-сортировальной машины следующей сформированной обрабатываемой стопки листового материала осуществляется выполнение вышеуказанных этапов обработки сформированной в рабочем кармане стопки листового материала (перемещение в обандероливатель при одновременном обеспечении возможности улавливания выпавшего листового материала; обвязывание обрабатываемой стопки листового материала и формирование корешка; определение наличия или отсутствия листового материала, выпавшего из обрабатываемой стопки при перемещении в обандероливатель, последующее перемещение корешка в соответствующий накопитель);
при отсутствии в рабочем кармане счетно-сортировальной машины следующей сформированной обрабатываемой стопки листового материала осуществляется проверка наличия листового материала в кармане выгрузки счетно-сортировальной машины, по результатам которой осуществляются следующие действия:
при отсутствии в кармане выгрузки счетно-сортировальной машины листового материала обработка листового материала в роботизированном комплексе завершается;
при наличии в кармане выгрузки счетно-сортировальной машины листового материала выполняется перемещение листового материала из кармана выгрузки счетно-сортировальной машины в накопитель временного хранения листового материала с последующим перемещением листового материала в лоток выгрузки, после чего обработка листового материала в роботизированном комплексе завершается.
В заявляемом способе, выполняемом согласно тому, как описано выше, обеспечивается, в отличие от прототипа, возможность улавливания листового материала в случае выпадения (утери) отдельного листа (или нескольких отдельных листов) при перемещении обрабатываемой стопки роботом-манипулятором из рабочего кармана ССМ в обандероливатель, а также перемещение выпавшего листа (листов) и соответствующего обандероленного неполного корешка листового материала (содержащего менее 100 листов в результате утери одного или нескольких листов из обрабатываемой стопки) в отдельный накопитель - накопитель неполных корешков и выпавшего листового материала, что, в свою очередь, обеспечивает возможность отделения неполных корешков, в отношении которых необходимо выполнение новой обработки в роботизированном комплексе, от корректно сформированных корешков, которые готовы к последующему формированию в пачки и отправке в хранилище (либо сразу к отправке в хранилище).
Таким образом, обеспечивая по сравнению с прототипом более широкие функциональные возможности, предлагаемый способ обработки листового материала позволяет в случае утери отдельных листов (банкнот) при перемещении обрабатываемой стопки из рабочего кармана ССМ в обандероливатель значительно уменьшить количество листового материала, заново подлежащего обработке в роботизированном комплексе, а следовательно, увеличить количество листового материала, обрабатываемого за смену, и тем самым повысить эффективность обработки листового материала в роботизированном комплексе.
При перемещении роботом-манипулятором обрабатываемой стопки листового материала (например, банкнот), сформированной в рабочем кармане счетно-сортировальной машины (ССМ), из рабочего кармана ССМ в обандероливатель в обрабатываемой стопке листового материала (например, банкнот), удерживаемой зажимными рабочими элементами захватного устройства (схватом) робота-манипулятора, может оказаться загнутый лист, не попадающий в область зажима листового материала рабочими элементами, например, губками, захватного устройства. Представляется целесообразным подвергнуть перемещаемую стопку листового материала силовому воздействию, чтобы лист, не попавший в область зажима рабочими элементами захватного устройства, но при этом все-таки имеющий вероятную возможность удержаться в перемещаемой стопке, например, за счет сил трения, выпал бы из стопки именно при ее перемещении из рабочего кармана ССМ в обандероливатель и был бы уловлен механизмом сбора листового материала. С этой целью роботом-манипулятором может выполняться встряхивание обрабатываемой стопки листового материала, сформированной в рабочем кармане ССМ, при ее перемещении из рабочего кармана ССМ в обандероливатель.
С целью повышения достоверности проверки листового материала (например, банкнот), выполняемой в ССМ, в отношении листового материала, помещенного по результатам первоначальной проверки в счетно-сортировальной машине обрабатываемой стопки листового материала в карман выгрузки счетно-сортировальной машины, может быть осуществлена однократная повторная проверка в счетно-сортировальной машине путем перемещения указанного листового материала из кармана выгрузки в карман загрузки ССМ для повторного выполнения проверки установленным критериям и последующего пересчета листового материала при его соответствии установленным критериям.
С целью уменьшения количества движений, выполняемых роботом-манипулятором, а также с целью уменьшения вероятности выпадения (утери) отдельных листов из обрабатываемой стопки при обвязывании обрабатываемой стопки листового материала (например, банкнот) в обандероливателе и формировании корешка листового материала может осуществляться удерживание роботом-манипулятором обрабатываемой стопки листового материала.
Проверка наличия листового материала на рабочей поверхности механизма сбора листового материала может быть выполнена путем сканирования рабочей поверхности механизма сбора листового материала с помощью узла технического зрения. Возможно применение различных систем (устройств) обнаружения объектов, например, высокочувствительных детекторов, но именно системы технического зрения в настоящее время наиболее широко востребованы в силу своей надежности и простоты эксплуатации.
Предлагаемый роботизированный комплекс для обработки листового материала (в частности, банкнот) содержит ограждение со шлюзами загрузки и выгрузки, обеспечивающими возможность приема и удаления заполненных и/или незаполненных листовым материалом (в частности, банкнотами) лотков. Внутри ограждения размещен робот-манипулятор, снабженный захватным устройством, которое обеспечивает возможность удерживания листового материала. Захватное устройство робота-манипулятора выполнено с механическими зажимными рабочими элементами и по меньшей мере одним вакуумным рабочим элементом. Внутри ограждения в рабочей зоне робота-манипулятора размещены: по меньшей мере одна счетно-сортировальная машина (ССМ), содержащая карман загрузки, карман выгрузки и по меньшей мере один рабочий карман; обандероливатель (упаковщик) листового материала; механизм сбора листового материала, обеспечивающий возможность улавливания на своей рабочей поверхности листового материала, выпавшего при перемещении роботом-манипулятором стопки листового материала из рабочего кармана ССМ в обандероливатель; накопитель корректно сформированных корешков; накопитель неполных корешков и выпавшего листового материала; накопитель временного хранения листового материала. Роботизированный комплекс также содержит узел технического зрения, обеспечивающий возможность обнаружения листового материала на рабочей поверхности механизма сбора листового материала.
В состав роботизированного комплекса, в отличие от прототипа, входит механизм сбора листового материала, предназначенный для улавливания на своей рабочей поверхности листового материала, выпавшего (утерянного) при перемещении роботом-манипулятором обрабатываемой стопки из рабочего кармана ССМ в обандероливатель, накопитель неполных корешков и выпавшего листового материала, позволяющий складировать подлежащие повторной обработке в роботизированном комплексе выпавшие листы и соответствующие неполные корешки отдельно от корректно сформированных корешков (которые складируются в своем накопителе), а также захватное устройство робота-манипулятора, выполненное с по меньшей мере одним вакуумным рабочим элементом, позволяющим максимально просто осуществить захват плоского листа (банкноты), уловленного механизмом сбора ЛМ и лежащего на его рабочей поверхности, и переместить в соответствующий накопитель. Такое конструктивное выполнение роботизированного комплекса позволяет при обработке листового материала (согласно описанному выше предлагаемому способу) в случае утери листового материала при перемещении обрабатываемой стопки из рабочего кармана ССМ в обандероливатель выполнить повторную обработку в комплексе только в отношении неполных корешков и выпавших листов, а не всего количества листового материала, обработанного за смену, что повышает эффективность работы комплекса в целом.
В роботизированном комплексе для обработки листового материала механизм сбора выпавшего листового материала может представлять собой вакуумный уловитель листового материала, причем вакуумный уловитель листового материала может быть выполнен в виде вакуумного стола, имеющего рабочую поверхность для улавливания листового материала и выполненного с возможностью выдвижения по направляющим в зону перемещения роботом-манипулятором обрабатываемой стопки листового материала из рабочего кармана ССМ в обандероливатель, так как устройства, в которых использованы элементы (обычно называемые вакуумными элементами), в рабочих областях которых создается разрежение воздуха для удерживания плоских элементов, листов, банкнот и т.п., широко применяются в современной промышленности и характеризуются высокой надежностью.
В машино- и приборостроении, например, широко применяются вакуумные столы для крепления обрабатываемых деталей. Так, например, известен вакуумный стол [а.с. СССР №SU215707 «Вакуумный стол», МПК B23Q3/08, дата публ. 03.04.1968], внутренняя полость которого разделена на секции, каждая из которых соединена с вакуум-насосом, а на поверхности стола расположены присосы, под деталью создается вакуум и за счет атмосферного давления она надежно, без деформаций, прижимается к рабочей поверхности. Также известно создание разреженных областей для удержания банкнот с целью их поштучного отделения из обрабатываемой стопки [патент №RU2194001 «Устройство отделения банкнот из пачки», МПК B65H3/48, дата публ. 10.12.2002].
В роботизированном комплексе для обработки листового материала узел технического зрения может быть расположен на консоли захватного устройства робота-манипулятора, так как при таком размещении узла технического зрения (в качестве которого может быть применена камера видеонаблюдения) обеспечивается наилучший обзор контролируемой области.
В качестве вакуумного рабочего элемента захватного устройства робота-манипулятора целесообразно использовать вакуумный держатель, а именно, вакуумную присоску, характеризующуюся конструктивно простым выполнением и эксплуатационной надежностью. Кроме того, вакуумная присоска представляет собой готовое стандартное изделие с широким диапазоном параметров и характеристик. Выполнение захватного устройства робота-манипулятора с двумя вакуумными присосками обеспечит более высокую надежность захвата листового материала, а также возможность захвата листа из труднодоступного места, например, с края рабочей поверхности механизма сбора листового материала.
Графические материалы содержат блок-схему алгоритма выполнения заявляемого способа обработки листового материала (в частности, банкнот), а также пример конкретного выполнения роботизированного комплекса для обработки листового материала (банкнот), с помощью которого осуществляется заявляемый способ.
На фиг. 1 представлено изображение роботизированного комплекса, с помощью которого осуществляется обработка банкнот, общий вид со стороны расположения лотков загрузки.
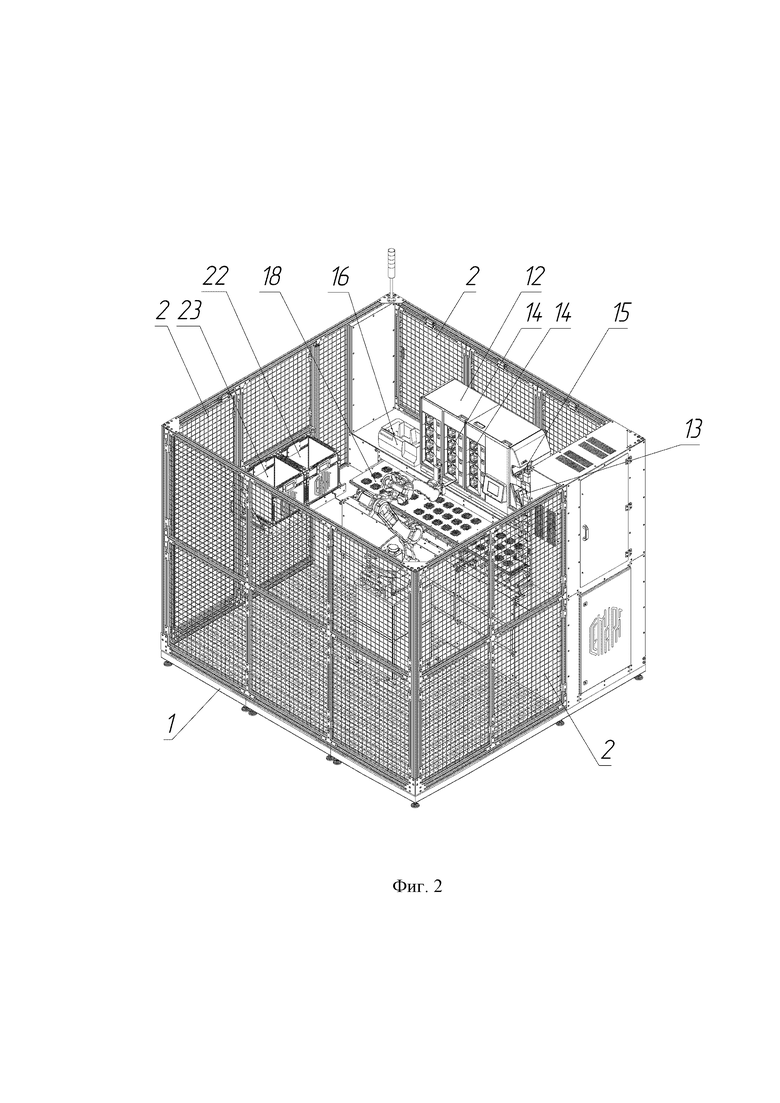
На фиг. 2 представлено изображение роботизированного комплекса, с помощью которого осуществляется обработка банкнот, общий вид, на котором показан механизм сбора листового материала (вакуумный стол).
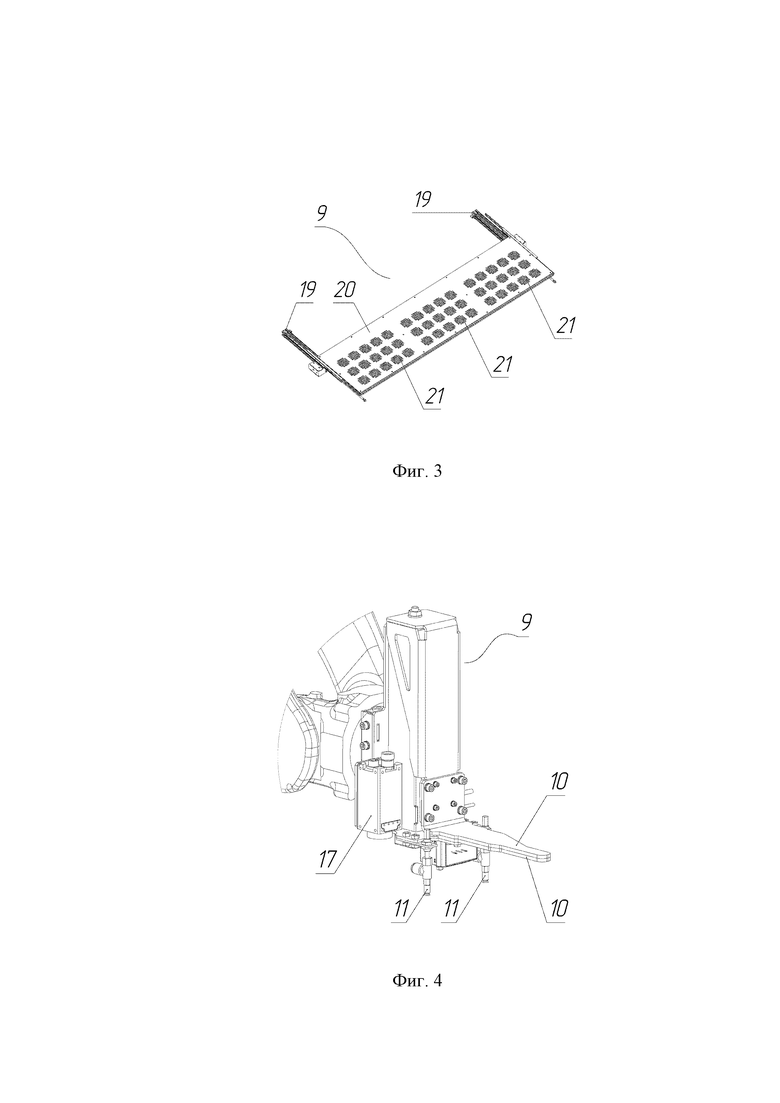
На фиг. 3 представлено отдельное изображение механизма сбора листового материала (вакуумный стол), общий вид.
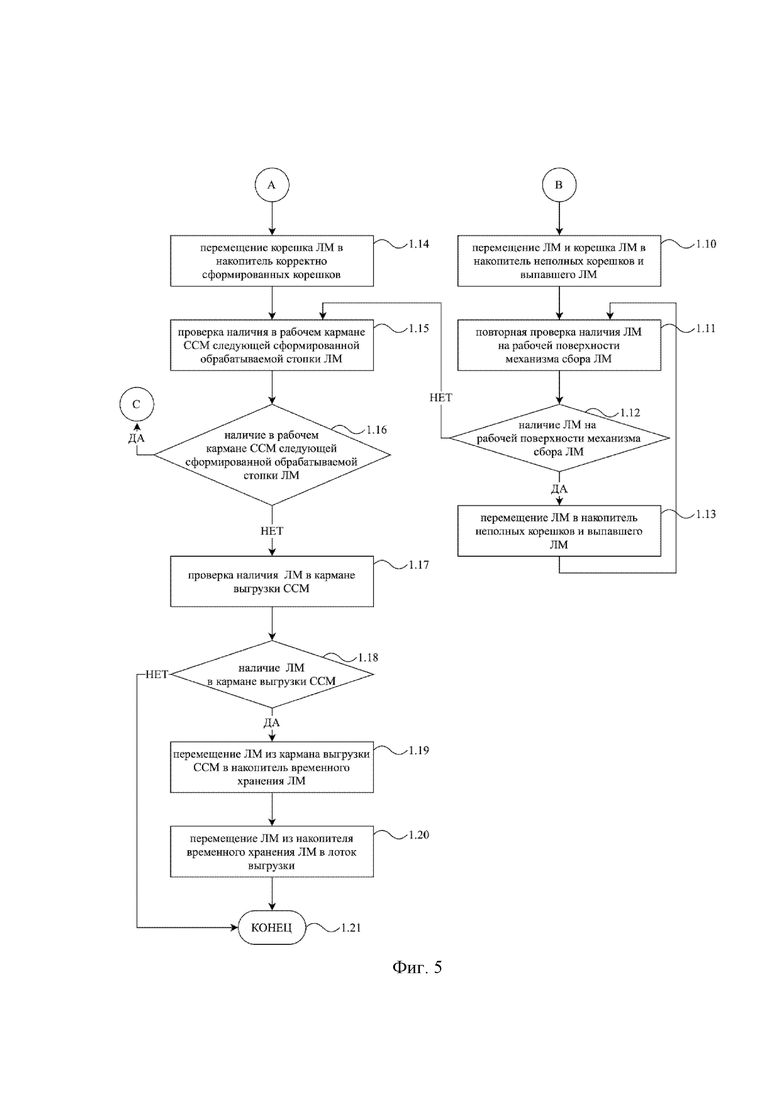
На фиг. 4 представлено отдельное изображение захватного устройства робота-манипулятора, общий вид.
Обработка депозитов, поступающих из различных источников в кассово-инкассаторские центры, осуществляется в роботизированных комплексах (ячейках, участках и т.п.).
На фиг. 5 представлена блок-схема алгоритма выполнения способа обработки листового материала, а именно, банкнот.
В состав роботизированного комплекса для обработки банкнот входят (фиг. 1 - 4):
1 - платформа (основание),
2 - защитное ограждение,
3 - входной шлюз (шлюз загрузки),
4 - выходной шлюз (шлюз выгрузки),
5 - лотки (контейнеры) загрузки,
6 - лотки (контейнеры) выгрузки,
7 - транспортировочный конвейер,
8 - робот-манипулятор,
9 - захватное устройство робота-манипулятора,
10 - зажимные рабочие элементы захватного устройства робота-манипулятора (губки),
11 - вакуумные рабочие элементы (вакуумные присоски) захватного устройства робота-манипулятора,
12 - счетно-сортировальная машина (ССМ),
13 - карман загрузки ССМ,
14 - рабочий карман ССМ,
15 - карман выгрузки ССМ
16 - обандероливатель стопки листового материала (ЛМ),
17 - узел технического зрения,
18 - механизм сбора листового материала (вакуумный стол),
19 - привод вакуумного стола,
20 - рабочая поверхность вакуумного стола,
21 - отверстия, выполненные в плите вакуумного стола,
22 - накопитель корректно сформированных корешков,
23 - накопитель неполных корешков и выпавшего листового материала,
24 - накопитель временного хранения листового материала,
В представленном примере выполнения роботизированного комплекса элементы, входящие в его состав, размещены на платформе 1, по периметру которой установлено защитное ограждение 2, в котором выполнены входной шлюз 3 (шлюз загрузки), выходной шлюз 4 (шлюз выгрузки), а также дверь (на фиг. отдельной позицией не обозначена) для входа персонала внутрь роботизированного комплекса в случаях, предусмотренных регламентом обслуживания комплекса. Через входной шлюз 3 и выходной шлюз 4, каждый из которых представляет собой окно, выполненное в защитном ограждении 2, осуществляется подача лотков загрузки 5 и лотков выгрузки 6 по направляющим транспортировочного конвейера 7 внутрь роботизированного комплекса. Внутри ограждения 2 установлен робот-манипулятор 8. Робот-манипулятор 8 имеет захватное устройство 9, снабженное механическими зажимными рабочими элементами - губками 10, а также вакуумными рабочими элементами - двумя вакуумными присосками 11. В качестве базовой модели робота-манипулятора может быть использована, например, модель Yaskawa MH-12. Внутри защитного ограждения 2 размещена счетно-сортировальная машина 12, имеющая карман загрузки 13, рабочие карманы 14, карман выгрузки 15. Следует отметить, что в состав роботизированного комплекса может входить несколько ССМ, например, две или три, что определяется количеством листового материала, обрабатываемого за смену, и учитывается при разработке программного обеспечения для системы управления роботизированным комплексом. Возможно использование таких моделей ССМ как, например, Giesecke & Devrient BPS C4, Glory UW, Laurel K12. Внутри защитного ограждения расположен обандероливатель 16 стопки листового материала (банкнот), который также может называться «упаковщиком корешков». В обандероливателе выполняется обвязывание обрабатываемой стопки банкнот (листового материала). Обвязанная стопка банкнот представляет корешок банкнот. Корректно сформированным считается корешок, в котором содержится 100 банкнот. В представленном примере роботизированный комплекс снабжен узлом технического зрения 17, представляющим собой камеру технического зрения, например, Omron FQ2, размещенную на консоли захватного устройства 9 робота-манипулятора 8. Внутри ограждения на платформе расположен вакуумный стол 18, представляющий собой плиту, установленную с возможностью перемещения по направляющим. Плита выдвигается по направляющим с помощью привода 19. Плита может быть изготовлена, например, из алюминия Д16. Верхняя поверхность плиты, являющаяся рабочей поверхностью 20 вакуумного стола 18, выполнена анодированной, черного цвета (для исключения бликов и обеспечения корректной работы узла технического зрения). На поверхности вакуумного стола создается разрежение за счет вакуумного компрессора либо вакуумных эжекторов, например, в плите 18 выполнены отверстия 21, выходящие на рабочую поверхность 20 плиты 18, с одной стороны, и связанные с областью, в которой создается разрежение воздуха, с другой стороны. Внутри ограждения также размещены накопитель 22 корректно сформированных корешков, накопитель 23 неполных корешков и выпавших банкнот, а также накопитель 24 временного хранения банкнот. Каждый из накопителей 22-24 представляет собой отдельный лоток. Функционирование представленного в качестве примера конкретного выполнения роботизированного комплекса осуществляется под управлением системы, реализованной на базе промышленного моноблока, программируемого логического контроллера ПЛК SIEMENS SI 200, ПЛК робота манипулятора, например, промышленного робототехнического контроллера YASKAVA DX200.
На блок-схеме (фиг. 5) представлены следующие блоки:
1.1 - НАЧАЛО;
1.2 - перемещение ЛМ из лотка загрузки в карман загрузки ССМ;
1.3 - проверка установленным критериям и пересчет ЛМ в ССМ;
1.4 - формирование обрабатываемой стопки ЛМ в рабочем кармане ССМ;
1.5 - ССМ;
1.6 - перемещение обрабатываемой стопки ЛМ из рабочего кармана ССМ в обандероливатель и улавливание выпавшего ЛМ механизмом сбора ЛМ;
1.7 - обвязывание обрабатываемой стопки ЛМ в обандероливателе (формирование корешка ЛМ);
1.8 - проверка наличия ЛМ на рабочей поверхности механизма сбора ЛМ;
1.9 - наличие ЛМ на рабочей поверхности механизма сбора ЛМ;
1.10 - перемещение ЛМ и корешка ЛМ в накопитель неполных корешков и выпавшего ЛМ;
1.11 - повторная проверка наличия ЛМ на рабочей поверхности механизма сбора ЛМ;
1.12 - наличие ЛМ на рабочей поверхности механизма сбора ЛМ;
1.13 - перемещение ЛМ в накопитель неполных корешков и выпавшего ЛМ;
1.14 - перемещение корешка ЛМ в накопитель корректно сформированных корешков;
1.15 - проверка наличия в рабочем кармане ССМ следующей сформированной обрабатываемой стопки ЛМ;
1.16 - наличие в рабочем кармане ССМ следующей сформированной обрабатываемой стопки ЛМ;
1.17 - проверка наличия ЛМ в кармане выгрузки ССМ;
1.18 - наличие ЛМ в кармане выгрузки ССМ;
1.19 - перемещение ЛМ из кармана выгрузки ССМ в накопитель временного хранения ЛМ;
1.20 - перемещение ЛМ из накопителя временного хранения в лоток выгрузки;
1.21 - КОНЕЦ.
Перед обработкой в роботизированном комплексе листовой материал, а именно банкноты, укладывают в лотки загрузки 5. Обычно эта операция выполняется оператором вручную. Вместе с банкнотами в лоток загрузки оператор укладывает и жетон депозита (идентификатор депозита). Алгоритм работы с идентификаторами депозитов обычно задается в зависимости от типа (вида) идентификатора и возможностей оборудования. С целью более полного описания процесса, связанного с обработкой листового материала (банкнот), далее также отражены этапы, связанные с обработкой идентификатора депозита. Оператор ставит лоток загрузки 5 с уложенными банкнотами и идентификатором депозита на автоматическое устройство подачи, а именно на направляющие (на фиг. отдельной поз. не обозначены) транспортировочного конвейера 7, скользя по которым заполненный лоток загрузки 5 поступает внутрь комплекса через входной шлюз 3 (шлюз загрузки), попадает на каретку поворотного механизма (на фиг. не показана) в зону работы робота-манипулятора 8.
Затем по другим направляющим транспортировочного конвейера 7 оператор подает в рабочую зону робота-манипулятора 8 пустой лоток выгрузки 6.
Конструкция лотка загрузки предусматривает возможность определения наличия в нем банкнот с помощью датчиков-детекторов, передающих информацию в систему управления. Подобные конструкции лотков известны, например, по патенту №RU193746U1 «Лоток для размещения банкнот», СПК G07D11/12, дата публ. 13.11.2019, или по патенту №RU2571193С2 «Ящик и система для обработки банкнот», МПК G07D9/00, дата публ. 20.12.2015. Если банкноты в лотке загрузки по какой-то причине отсутствуют, то система управления дает команду на удаление лотка загрузки из рабочей зоны робота-манипулятора, при этом поворотный механизм опускается, наклоняется, и лоток загрузки автоматически скатывается по направляющим к выходному шлюзу 4 (шлюзу выгрузки), через который выводится за пределы защитного ограждения 2, после чего проверяется наличие следующего лотка загрузки.
При наличии банкнот в лотке загрузки производится сканирование (например, с помощью узла технического зрения 17, расположенного на консоли захватного устройства 9 робота-манипулятора 8) штрих-кода жетона, и информации об обрабатываемом депозите передается в блок управления для дальнейшей передачи в хранилище, затем робот-манипулятор 8 захватывает жетон и перемещает его в накопитель 24 временного хранения листового материала, куда впоследствии будут перемещены и банкноты (при их наличии), помещенные в карман выгрузки ССМ по результату их проверки в ССМ.
При невозможности по каким-либо причинам считывания информации с жетона лоток загрузки удаляется (выгружается) через выходной шлюз 4.
Таким образом, после сканирования штрих-кода жетона и считывания информации выполняется захват стопки банкнот (листового материала) с помощью зажимных рабочих элементов 10 и ее перемещение роботом-манипулятором 8 из лотка загрузки 5 в загрузочный карман 13 ССМ 12 (фиг. 5, блок 1.2).
Затем в ССМ 12 выполняется проверка банкнот установленным критериям и их пересчет (фиг. 5, блок 1.3).
Банкноты, прошедшие проверку и принятые ССМ к пересчету, помещаются в рабочие карманы 14 ССМ, где в каждом формируется стопка из 100 банкнот (фиг. 5, блок 1.4). Обычно в разных рабочих карманах формируются обрабатываемые стопки банкнот разных номиналов. Операции, выполняемые в ССМ, на фиг. 5 обозначены блоком 1.5.
Когда в рабочем кармане 14 ССМ сформировалась стопка из 100 банкнот (одного номинала), система управления получает об этом информацию, и из блока управления поступает команда роботу-манипулятору осуществить захват сформированной в рабочем кармане ССМ стопки банкнот и переместить ее из рабочего кармана 14 ССМ в обандероливатель 16, при этом с помощью механизма сбора листового материала обеспечивается возможность улавливания банкнот, которые в процессе перемещения могут выпасть из удерживаемой схватом робота-манипулятора обрабатываемой стопки (фиг. 5, блок 1.6). Механизм сбора банкнот в приведенном примере выполнения представляет собой вакуумный уловитель листового материала (выпавших банкнот) - вакуумный стол 18, который выдвигается по направляющим (на фиг. не показаны) с помощью привода 19 в зону перемещения роботом-манипулятором обрабатываемой стопки из рабочего кармана 14 ССМ 12 в обандероливатель 16 сразу после того, как в одном из рабочих карманов ССМ сформировалась обрабатываемая стопка банкнот (из 100 листов). Стол 18 находится в рабочем состоянии, при котором в полостях, выходящих (в виде отверстий 21) на рабочую поверхность 20, создано разрежение воздуха, обеспечивающее надежное притягивание выпавших банкнот (листов). Поэтому если в силу указанных ранее причин одна или несколько банкнот выпадут из перемещаемой роботом-манипулятором обрабатываемой стопки, то выпавшие банкноты будут уловлены и удержаны на рабочей поверхности 20 вакуумного стола 18.
При перемещении стопки банкнот из рабочего кармана ССМ в обандероливатель робот-манипулятор выполняет встряхивание стопки банкнот с целью обеспечения выпадения над рабочей поверхностью вакуумного стола (в зоне улавливания) тех банкнот, которые не попали в область зажима рабочих элементов 10, но могут удерживаться внутри стопки за счет сил трения.
В обандероливателе 16 выполняется обвязывание обрабатываемой стопки листового материала (банкнот) и формирование корешка листового материала (банкнот), при этом робот-манипулятор продолжает удерживать стопку своими зажимными рабочими элементами - губками 10, чтобы исключить дополнительную операцию отпуска и последующего захвата стопки банкнот роботом-манипулятором, что снижает вероятность утери одной или нескольких банкнот из стопки (фиг. 5, блок 1.7).
Затем осуществляется проверка наличия банкнот на рабочей поверхности 20 вакуумного стола 18 путем сканирования рабочей поверхности 20 с помощью узла технического зрения 17 (фиг. 5, блоки 1.8, 1.9).
При отсутствии банкнот на рабочей поверхности 20 робот-манипулятор 8 перемещает сформированный корешок банкнот в накопитель 22 корректно сформированных корешков (фиг. 5, блоки 1.9, 1.14), после чего система проверяет наличие в рабочем кармане ССМ следующей сформированной обрабатываемой стопки банкнот (фиг. 5, блок 1.15).
При наличии банкнот на рабочей поверхности 20 вакуумного стола 18 робот-манипулятор 8 осуществляет захват с помощью вакуумных присосок 11 обнаруженных банкнот и перемещает их, а также сформированный корешок, из которого эти банкноты выпали, в накопитель 23 неполных корешков и выпавшего листового материала (фиг. 5, блоки 1.9, 1.10). Затем выполняется повторное сканирование рабочей поверхности вакуумного стола (фиг. 5, блоки 1.11, 1.12). При наличии выпавших банкнот, робот-манипулятор захватывает и перемещает обнаруженную банкноту в накопитель 23 неполных корешков и выпавшего листового материала (фиг. 5, блоки 1.12, 1.13). Повторное сканирование с последующим перемещением обнаруженных банкнот в накопитель 23 выполняют до тех пор, пока рабочая поверхность вакуумного стола не окажется пустой, т.е. выполнение каждой последующей повторной проверки осуществляется после каждого обнаружения банкноты на рабочей поверхности механизма сбора.
При отсутствии банкнот на рабочей поверхности 20 вакуумного стола 18 осуществляется проверка наличия в рабочем кармане ССМ следующей сформированной обрабатываемой стопки банкнот (фиг. 5, блоки 1.12, 1.15).
При наличии в рабочем кармане ССМ следующей сформированной стопки банкнот осуществляется выполнение всех вышеуказанных этапов обработки в отношении сформированной в рабочем кармане стопки банкнот (фиг. 5, блоки 1.15, 1.6 - 1.14): перемещение в обандероливатель, улавливание выпавших банкнот, формирование корешка, сканирование рабочей поверхности механизма сбора, перемещение корешка в соответствующий накопитель, а также складирование выпавших банкнот (если таковые имеются) в соответствующий накопитель.
Если в рабочем кармане 14 ССМ 12 отсутствует следующая сформированная стопка банкнот, то выполняется проверка наличия банкнот в кармане выгрузки 15 ССМ 12 (фиг. 5, блоки 1.15, 1.17). При отсутствии банкнот в кармане выгрузки 15 ССМ 12 обработка банкнот в роботизированном комплексе завершается (фиг. 5, блоки 1.18, 1.21). В этом случае робот-манипулятор перемещает из накопителя 24 в лоток выгрузки 6 только идентификатор депозита, после чего лоток 6 по транспортировочному конвейеру 7 выводится через выходной шлюз 4 за пределы защитного ограждения 1.
При наличии банкнот в кармане выгрузки ССМ выполняется перемещение банкнот из кармана выгрузки ССМ в накопитель 24 временного хранения (фиг. 5, блок 1.19) с последующим перемещением банкнот и уже находящегося там же идентификатора депозита в лоток выгрузки 6 (фиг. 5, блок 1.20), после чего обработка банкнот в роботизированном комплексе завершается (фиг. 5, блок 1.21). Затем лоток выгрузки 6 по транспортировочному конвейеру выводится через выходной шлюз 4 за пределы защитного ограждения 1. Возможно осуществление однократной повторной проверки в ССМ банкнот, помещенных в карман выгрузки, что позволит минимизировать вероятность случайного сбоя при проверке банкнот в ССМ.
Выполнение обработки банкнот осуществляется до тех пор, пока в рабочих карманах 14 ССМ 12 имеются сформированные обрабатываемые стопки банкнот.
Пустой лоток загрузки 5 и заполненный лоток выгрузки 6 автоматически удаляются из роботизированного комплекса через шлюз выгрузки 4.
Таким образом, при осуществлении заявляемого способа обработки листового материала, в частности, банкнот, при использовании предлагаемого роботизированного комплекса обеспечивается возможность улавливания механизмом сбора листового материала (например, вакуумным столом) тех листов, которые выпали из захватного устройства робота-манипулятора на этапе перемещения обрабатываемой стопки из рабочего кармана ССМ в обандероливатель. Кроме того, обеспечивается возможность обнаружения выпавших листов с помощью узла технического зрения, а также последующее перемещение роботом-манипулятором и складирование выпавших листов и соответствующих неполных корешков в отдельном накопителе в автоматическом режиме (т.е. без остановки работы комплекса). Такое расширение функциональных возможностей способа обработки листового материала и предлагаемого для осуществления этого способа роботизированного комплекса позволяет значительно сократить количество листового материала, заново подлежащего обработке в роботизированном комплексе в случае утери листового материала на этапе перемещения из рабочего кармана ССМ в обандероливатель, что, в свою очередь, позволяет повысить эффективность обработки листового материала.


Группа изобретений относится к способам обработки листового материала, в частности банкнот, с помощью автоматизированных счетно-сортировальных комплексов, предназначенных для применения в кассово-инкассаторских центрах. Технический результат: расширение функциональных возможностей способа обработки листового материала и применяемого для осуществления этого способа роботизированного комплекса. Способ обработки листового материала с помощью роботизированного комплекса включает сортировку, проверку установленным критериям, пересчет листового материала в счетно-сортировальной машине (ССМ), обандероливание стопок листового материала, а также улавливание и проверку наличия листового материала, выпавшего из обрабатываемой стопки при ее перемещении из рабочего кармана ССМ в обандероливатель, с последующим перемещением в отдельный накопитель выпавших банкнот и соответствующих неполных корешков. Роботизированный комплекс содержит защитное ограждение со шлюзами, внутри которого размещены робот-манипулятор; ССМ; обандероливатель; механизм сбора листового материала, обеспечивающий возможность улавливания выпавших из схвата робота-манипулятора банкнот при перемещении обрабатываемой стопки из рабочего кармана ССМ в обандероливатель; накопитель корректно сформированных корешков; накопитель неполных корешков и выпавшего листового материала; накопитель временного хранения листового материала. Роботизированный комплекс также содержит узел технического зрения, обеспечивающий возможность обнаружения листового материала на рабочей поверхности механизма сбора листового материала. 2 н. и 9 з.п. ф-лы, 5 ил.
1. Способ обработки листового материала в роботизированном комплексе, при осуществлении которого
- выполняется перемещение листового материала из лотка загрузки в карман загрузки счетно-сортировальной машины с помощью робота-манипулятора;
- в счетно-сортировальной машине выполняется проверка установленным критериям и пересчет листового материала;
- в по меньшей мере одном рабочем кармане счетно-сортировальной машины осуществляется формирование обрабатываемой стопки листового материала, после чего осуществляются следующие этапы обработки упомянутой стопки листового материала:
- осуществляется перемещение сформированной в рабочем кармане счетно-сортировальной машины обрабатываемой стопки листового материала из рабочего кармана счетно-сортировальной машины в обандероливатель с помощью робота-манипулятора при одновременном обеспечении возможности улавливания листового материала, выпавшего из обрабатываемой стопки при выполняемом перемещении, с помощью механизма сбора листового материала;
- выполняется обвязывание обрабатываемой стопки листового материала в обандероливателе с формированием корешка листового материала;
- осуществляется проверка наличия листового материала, выпавшего из обрабатываемой стопки листового материала при ее перемещении роботом-манипулятором из рабочего кармана счетно-сортировальной машины в обандероливатель, на рабочей поверхности механизма сбора листового материала, по результатам которой осуществляются следующие действия:
- при отсутствии листового материала на рабочей поверхности механизма сбора листового материала осуществляется перемещение с помощью робота-манипулятора сформированного корешка листового материала в накопитель корректно сформированных корешков, после чего осуществляется проверка наличия в рабочем кармане счетно-сортировальной машины следующей сформированной обрабатываемой стопки листового материала;
- при наличии листового материала на рабочей поверхности механизма сбора листового материала осуществляется перемещение с помощью робота-манипулятора обнаруженного листового материала и сформированного корешка листового материала в накопитель неполных корешков и выпавшего листового материала;
- затем осуществляется повторная проверка наличия листового материала на рабочей поверхности механизма сбора листового материала, по результатам которой:
- при наличии листового материала на рабочей поверхности осуществляется его перемещение в накопитель неполных корешков и выпавшего листового материала, а при отсутствии листового материала на рабочей поверхности осуществляется проверка наличия в рабочем кармане счетно-сортировальной машины следующей сформированной обрабатываемой стопки листового материала, причем выполнение каждой следующей повторной проверки наличия листового материала на рабочей поверхности осуществляется, если результатом предыдущей проверки являлось наличие листового материала на рабочей поверхности;
- по результатам проверки наличия в рабочем кармане счетно-сортировальной машины следующей сформированной обрабатываемой стопки листового материала осуществляются следующие действия:
- при наличии в рабочем кармане счетно-сортировальной машины следующей сформированной обрабатываемой стопки листового материала осуществляется выполнение вышеуказанных этапов обработки сформированной в рабочем кармане стопки листового материала;
- при отсутствии в рабочем кармане счетно-сортировальной машины следующей сформированной обрабатываемой стопки листового материала осуществляется проверка наличия листового материала в кармане выгрузки счетно-сортировальной машины, по результатам которой осуществляются следующие действия:
- при отсутствии в кармане выгрузки счетно-сортировальной машины листового материала обработка листового материала в роботизированном комплексе завершается;
- при наличии в кармане выгрузки счетно-сортировальной машины листового материала выполняется перемещение листового материала из кармана выгрузки счетно-сортировальной машины в накопитель временного хранения листового материала с последующим перемещением листового материала в лоток выгрузки, после чего обработка листового материала в роботизированном комплексе завершается.
2. Способ обработки листового материала по п.1, при осуществлении которого роботом-манипулятором выполняется встряхивание обрабатываемой стопки листового материала при перемещении обрабатываемой стопки листового материала, сформированной в рабочем кармане счетно-сортировальной машины, из рабочего кармана счетно-сортировальной машины в обандероливатель.
3. Способ обработки листового материала по п.1, при осуществлении которого в отношении листового материала, помещенного по результатам проверки в счетно-сортировальной машине в карман выгрузки счетно-сортировальной машины, осуществляется однократная повторная проверка в счетно-сортировальной машине путем перемещения указанного листового материала из кармана выгрузки счетно-сортировальной машины в карман загрузки счетно-сортировальной машины для повторного выполнения проверки установленным критериям и последующего пересчета листового материала при его соответствии установленным критериям.
4. Способ обработки листового материала по п.1, при осуществлении которого при обвязывании обрабатываемой стопки листового материала в обандероливателе и формировании корешка листового материала осуществляется удерживание роботом-манипулятором обрабатываемой стопки листового материала.
5. Способ обработки листового материала по п.1, при осуществлении которого проверка наличия листового материала на рабочей поверхности механизма сбора листового материала выполняется путем сканирования рабочей поверхности механизма сбора листового материала с помощью узла технического зрения.
6. Роботизированный комплекс для осуществления способа обработки листового материала по п.1, характеризующийся тем, что содержит ограждение со шлюзами загрузки и выгрузки, обеспечивающими возможность приема и удаления заполненных и/или незаполненных листовым материалом лотков; внутри ограждения размещен робот-манипулятор, снабженный захватным устройством, обеспечивающим возможность удерживания листового материала, при этом захватное устройство робота-манипулятора выполнено с зажимными рабочими элементами и по меньшей мере одним вакуумным рабочим элементом; внутри ограждения в рабочей зоне робота-манипулятора размещены: по меньшей мере одна счетно-сортировальная машина, содержащая карман загрузки, карман выгрузки и по меньшей мере один рабочий карман; обандероливатель листового материала; механизм сбора листового материала, обеспечивающий возможность улавливания на своей рабочей поверхности листового материала при перемещении роботом-манипулятором стопки листового материала из рабочего кармана счетно-сортировальной машины в обандероливатель; накопитель корректно сформированных корешков; накопитель неполных корешков и выпавшего листового материала; накопитель временного хранения листового материала; роботизированный комплекс также содержит узел технического зрения, обеспечивающий возможность обнаружения листового материала на рабочей поверхности механизма сбора листового материала.
7. Роботизированный комплекс по п.6, характеризующийся тем, что механизм сбора листового материала представляет собой вакуумный уловитель листового материала.
8. Роботизированный комплекс по п.7, характеризующийся тем, что вакуумный уловитель листового материала выполнен в виде вакуумного стола, имеющего рабочую поверхность для улавливания листового материала и выполненного с возможностью выдвижения по направляющим в зону перемещения роботом-манипулятором обрабатываемой стопки листового материала из рабочего кармана счетно-сортировальной машины в обандероливатель.
9. Роботизированный комплекс по п.6, характеризующийся тем, что узел технического зрения расположен на консоли захватного устройства робота-манипулятора.
10. Роботизированный комплекс по п.6, характеризующийся тем, что в качестве вакуумного рабочего элемента захватного устройства робота-манипулятора использован вакуумный держатель, представляющий собой вакуумную присоску.
11. Роботизированный комплекс по п.10, характеризующийся тем, что захватное устройство робота-манипулятора выполнено с двумя вакуумными присосками.
| Способ переработки отходов, остающихся после крэкинга с хлористым алюминием | 1931 |
|
SU34673A1 |
| Роботизированный счетно-сортировальный комплекс | 2016 |
|
RU2622485C1 |
| US 5250788 A1, 05.10.1993. | |||

