Данное изобретение относится к способу и установке для обработки ценных документов, прежде всего извлечения ценных документов из контейнеров для ценных документов с помощью захвата.
Для хранения банкнотов используются контейнеры, в которых ценные документы, прежде всего банкноты, находятся в виде раздельных совокупностей. Под раздельными совокупностями при этом следует понимать количество по меньшей мере в один банкнот или более, которое соотнесено с заданным лицом, счетом, учетной единицей и т.д. Кроме того, наряду с банкнотами, совокупности могут содержать также чеки, квитанции или другие ценные документы. Например, раздельные совокупности могут быть образованы раздельными платежами (депозитами). При этом раздельные платежи подготавливаются перед обработкой посредством машины обработки банкнот для назначенной обработки и закладываются в контейнер. Для этого производится получение данных или же информации, прежде всего о платежах, и предоставление их в распоряжение машины обработки банкнот для обработки. При этом данные могут содержать указания о депоненте, номере счета, количестве и номиналу образующих платежи банкнотов, однозначный номер трансакции и т.д.
Для обеспечения бесперебойной обработки посредством машины обработки банкнот платежи разделяются друг от друга, например, группирующими картами или разделительными картами, которые вводятся между различными платежами. Машина обработки банкнот распознает эти группирующие карты или разделительные карты и тем самым также начало новых платежей.
Для отделения различных стопок ценных документов из DE 102009042891 А1 известно применение разделительных элементов, посредством которых контейнер может быть гибко подразделен на несколько областей хранения ценных документов. В контейнер, который открыт с одной стороны, вкладываются одна или несколько стопок ценных документов, состоящих из свободных ценных документов. Для извлечения ценных документов контейнер расположен, как правило, таким образом, что его открытая сторона обращена наверх, и ценные документы стоят в контейнере на их продольных кромках. Как внутренняя стенка контейнера, так и разделительные элементы имеют на их обращенных к поверхностям ценных документов сторонах, предпочтительно, поверхности в форме меандра, образованные несколькими выступами и выемками. Для автоматического извлечения стопки ценных документов захватом из контейнера может применяться захват с несколькими захватными пальцами, которые погружаются сверху в выемки поверхности в форме меандра. Захват имеет, например, два подобных гребенке захватных элемента, образованных из нескольких захватных пальцев, которые могут быть перемещены друг к другу и друг от друга для надежного захватывания стопки ценных документов без опасности их повреждения, как только захватные пальцы погружены вертикально в выемки контейнера. Таким образом, требуемая стопка ценных документов может быть захвачена, извлечена из контейнера и выложена на удалении от контейнера или вложена в установку для обработки ценных документов.
Захват оснащен оптическими датчиками, которые могут обнаруживать отраженный от находящейся на днище контейнера полосы отражения свет. Для обнаружения того, в каких положениях имеются в наличии в контейнере разделительные элементы и занесены ли между разделительными элементами контейнера ценные документы, захват перемещается вдоль продольного направления контейнера. Посредством соответственно обнаруженного сигнала датчика захват может обнаруживать, заметна ли в соответствующем положении контейнера, в котором захват в данный момент находится, полоса отражения, или она закрыта ценными документами или разделительным элементом. С помощью датчиков захват таким образом ищет правильное положение для опускания захватных элементов. Если он нашел правильное положение, то захватные элементы опускаются для извлечения содержащейся между разделительными элементами стопки ценных документов. После того, как первая стопка ценных документов была извлечена из контейнера и отведена захватом, захват прибывает назад к контейнеру для извлечения последующей стопки ценных документов и т.д.
При прежнем способе извлечения стопок ценных документов является невыгодным то, что захват после каждого извлечения стопки ценных документов должен проверять, имеется ли в наличии и, если имеется, то в каком положении в контейнере находится следующая изымаемая стопка ценных документов, и что захват должен искать с помощью его датчиков каждый раз правильное положение для опускания захвата, поскольку он может его обнаружить только тогда, когда он находится в положении опускания над разделительным элементом. При этом поиске следующего положения опускания захват должен перемещаться над контейнером относительно медленно.
Другой недостаток этого последовательного обнаружения положений разделительных элементов состоит в том, что возможное ошибочное расположение разделительных элементов может быть раскрыто только в процессе опорожнения контейнера. Возможен, например, случай предоставления информации о содержимом контейнера о данных для пяти платежей, когда в действительности, однако, имеются в наличии только четыре области хранения. Также возможен случай, когда расстояние между разделительными элементами было выбрано слишком большим таким образом, что превзойден диапазон перемещения захватных элементов и стопка более не может быть надежно захвачена. При последовательном обнаружении положений разделительных элементов такие ошибки обнаруживаются только тогда, когда контейнер уже частично опорожнен. Однако прекращение извлечения ценных документов к этому моменту времени является невыгодным, поскольку в таком случае требуется затратный по времени ручной учет данных и повторная обработка частично опорожненного контейнера.
Целью данного изобретения является ускорение процесса извлечения стопок ценных документов из контейнеров для ценных документов.
Эта цель достигнута признаками независимых пунктов формулы изобретения. Зависимые пункты формулы изобретения содержат предпочтительные варианты осуществления изобретения.
Ценные документы предоставляются в контейнере, который открыт на одной стороне и разделен разделительными элементами на несколько областей хранения для ценных документов, в которых в соответствующих случаях ценные документы могут содержаться или нет. Для извлечения ценных документов из контейнера используется захват, который выполнен для извлечения содержащихся в контейнере ценных документов. Захват расположен таким образом, что он способен вкладывать изъятую из контейнера стопку ценных документов в короб ввода установки для обработки ценных документов. Поскольку положения разделительных элементов различных контейнеров для ценных документов могут быть различными, в каждом случае для обрабатываемого контейнера производится обнаружение положений расположения разделительных элементов по длине контейнера. Тем не менее, обнаружение положений разделительных элементов производится не захватом, а уже к более раннему моменту времени независимо от захвата, то есть, без использования захвата. Обнаружение положений разделительных элементов контейнера выполняется к моменту времени, предшествующему началу извлечения посредством захвата ценных документов из контейнера. Таким образом, положения разделительных элементов могут быть обнаружены без использования датчиков захвата. Обнаруженные данные о принадлежащих контейнеру положениях разделительных элементов передается затем в систему управления захватом в составе захвата, которая выполнена для управления перемещением захвата. Для извлечения ценных документов из контейнера система управления захватом управляет захватом соответственно ранее переданным данным о положениях разделительных элементов таким образом, что захват в положении опускания располагается над соответствующим разделительным элементом и опускается из положения опускания в контейнер для извлечения ценных документов из контейнера.
Обнаружение положений разделительного элемента контейнера выполняется, прежде всего, к моменту времени, предшествующему перемещению захвата к данному контейнеру для извлечения ценных документов из данного контейнера. Прежде всего, при этом выполняется передача данных о положениях разделительных элементов контейнера в систему управления захватом прежде перемещения захвата к данному контейнеру для извлечения ценных документов из данного контейнера. Информация о последующем в каждом случае положении опускания захвата находится уже в распоряжении системы управления захватом, прежде чем захват прибывает в соответствующее положение опускания над контейнером, предпочтительно, прежде перемещения захвата к контейнеру для извлечения ценных документов из контейнера. В случае противоречивого или ошибочного числа и/или положения разделительных элементов может быть выпущено сообщение об ошибке и предотвращено извлечение захватом до тех пор, пока ошибка не будет устранена или весь контейнер не будет изъят без его опустошения.
Положение разделительных элементов обнаруживается не захватом, а другим устройством или же лицом. Поэтому обнаруживать положение разделительных элементов соответствующего контейнера можно не только тогда, когда захват перемещается к контейнеру, а узнавать его уже раньше. Поскольку система управления захватом получает информацию о положении разделительных элементов соответствующего контейнера уже ранее, чем до сих пор, предотвращена ситуация, когда захват при каждом извлечении стопки должен вновь самостоятельно искать его последующее положение опускания. Таким образом, захват может быстрее прибывать в правильное положение опускания. Извлечение ценных документов из контейнера вследствие этого ускоряется. Тем самым сделана возможной непрерывно высокая скорость обработки установкой для обработки ценных документов также в том случае, когда соответствующий контейнер имеет много маленьких областей хранения с немногочисленными ценными документами.
Захват имеет, например, подобные гребенке структуры, которые выполнены для вхождения в свободные выемки разделительных элементов, которые обращены к располагающимся между разделительными элементами областям хранения ценных документов. Система управления захватом располагает захват в зависимости от соответствующего положения разделительного элемента в таком положении опускания над контейнером, в котором захватные пальцы захвата посредством опускания захвата в контейнер могут погрузиться в выемки соответствующего разделительного элемента. После извлечения из контейнера изъятые из контейнера ценные документы вкладываются захватом, например, в короб ввода установки для обработки ценных документов, и затем обрабатываются установкой для обработки ценных документов.
В соответствии с изобретением для ускоренного получения данных обнаружение положений разделительных элементов контейнера автоматически выполняется одновременно для нескольких разделительных элементов соответствующего контейнера. Положения разделительных элементов контейнера могут обнаруживаться одновременно, прежде чем захват начнет извлечение ценных документов из контейнера, прежде всего прежде чем захват будет перемещен к контейнеру для извлечения ценных документов из контейнера. Например, положения разделительного элемента для этого автоматически обнаруживаются с помощью одного или нескольких датчиков, например, посредством датчиков установки для обработки ценных документов или датчиков модуля ввода установки для обработки ценных документов. Например, положения разделительных элементов одновременно обнаруживаются посредством нескольких датчиков, которые расположены вдоль контейнерного приемного приспособления, в котором контейнер размещен для извлечения ценных документов. Датчики расположены вдоль контейнерного приемного приспособления таким образом, что каждое из возможных положений разделительного элемента установленного в контейнерном приемном приспособлении контейнера может быть проверено посредством в каждом случае одного из датчиков на то, действительно ли имеется в наличии в контейнере разделительный элемент в соответствующем возможном положении разделительного элемента. Тем самым могут быть одновременно обнаружены все положения действительно наличествующих в контейнере разделительных элементов, прежде чем захват начнет извлечение ценных документов из контейнера, прежде всего прежде чем захват переместится к контейнеру для извлечения ценных документов из контейнера. Вместо нескольких датчиков вдоль контейнерного приемного приспособления положения разделительных элементов могут быть также автоматически обнаружены с помощью датчика изображения, который формирует изображение установленного в контейнерном приемном приспособлении контейнера и из полученного изображения обнаруживает положения разделительных элементов, прежде чем захват начнет извлечение ценных документов из контейнера, прежде всего прежде чем захват переместится к контейнеру для извлечения ценных документов из контейнера.
Вместо одновременного обнаружения всех разделительных элементов контейнера положения разделительных элементов могут одновременно обнаруживаться также группами, причем одновременно автоматически исследуется в каждом случае только область нескольких возможных положений разделительных элементов.
В одном варианте осуществления данные о положениях разделительных элементов обнаруживаются вне области обнаружения захвата вручную или автоматически, и накапливаются в носителе данных контейнера, который постоянно закреплен на контейнере. Данные о положениях разделительных элементов могут быть получены из накопителя данных посредством считывающего устройства, например, считывающего устройства контейнерного приемного приспособления, в котором контейнер размещен при извлечении ценных документов. Отобранные данные могут быть переданы считывающим устройством в систему управления захватом, прежде чем захват начнет извлечение ценных документов из контейнера, прежде всего прежде чем захват переместится к контейнеру для извлечения ценных документов из контейнера.
Контейнер может быть оснащен контейнерным идентификатором, например, номером и/или размещенным на контейнере штриховым кодом, который однозначно идентифицирует контейнер или, по меньшей мере, разновидность контейнера (например, величину). В некоторых вариантах осуществления данные о положениях разделительных элементов обнаруживаются вне области обнаружения захвата вручную или автоматически, и сопрягаются там с контейнерным идентификатором соответствующего контейнера. Контейнерный идентификатор в таком случае совместно с сопряженными данными о положениях разделительных элементов передается через канал передачи данных в систему управления захватом, а именно прежде чем захват начнет извлечение ценных документов из контейнера, прежде всего прежде чем захват переместится к контейнеру для извлечения ценных документов из контейнера. Канал передачи данных может, например, быть представлен беспроводным или проводным сетевым подключением, посредством которого система управления захватом получает данные. Переданные посредством сетевого подключения данные записывается в накопителе данных, например накопителе данных системы управления захватом. В накопителе данных соответствующие положения разделительных элементов, например, для нескольких контейнеров записываются сопряженно с соответствующим контейнерным идентификатором.
Для задания положений разделительных элементов подлежащего скорой обработке контейнера, контейнерный идентификатор подлежащего скорой обработке контейнера считывается посредством считывающего устройства, например, во время извлечения ценных документов из предыдущего контейнера. Затем из накопителя данных выбираются данные о положениях разделительных элементов для считанного контейнерного идентификатора обрабатываемого контейнера, которые были ранее записаны сопряженно со считанным контейнерным идентификатором обрабатываемого контейнера. Таким образом, данные предоставляется в распоряжение системе управления захватом, прежде чем захват начнет извлечение ценных документов из контейнера, прежде всего прежде чем захват переместится к контейнеру для извлечения ценных документов из контейнера.
Разделительные элементы контейнера могут быть представлены фиксированными разделительными элементами, положения которых заранее известны и не изменяются. Например, известны одна или несколько различных разновидностей контейнера с фиксированными разделительными элементами, причем контейнеры соответствующей разновидности контейнера имеют одинаковые положения разделительных элементов. Для известных разновидностей контейнера, например, в преддверии обработки ценных документов, эти уже известные положения разделительных элементов могут быть в таком случае увязаны с соответствующим контейнерным идентификатором и записаны в накопителе данных. При обработке контейнера известной разновидности контейнера действительные для соответствующего контейнера положения разделительных элементов посредством контейнерного идентификатора могут быть тогда выбраны из накопителя данных.
Однако разделительные элементы могут быть расположены в контейнере переменным образом, при этом разделительные элементы укрепляются в контейнере в свободно выбираемых или в предварительно заданных положениях разделительных элементов. В таком случае положения разделительных элементов закрепляются тогда, только когда контейнер наполняется ценными документами. В случае разделительных элементов с переменным положением считанный контейнерный идентификатор обрабатываемого контейнера сравнивается на соответствие с переданными посредством канала передачи данных контейнерными идентификаторами. Положения разделительных элементов обрабатываемого контейнера являются в таком случае теми переданными посредством канала передачи данных положениями разделительных элементов, которые сопряжены с совпадающим контейнерным идентификатором. Выбор сопряженных положений разделительных элементов выполняется, прежде чем захват начинает извлечение ценных документов из обрабатываемого контейнера, например, во время извлечения ценных документов из предыдущего контейнера, который обрабатывается перед обрабатываемым контейнером.
Вне области обнаружения захвата обнаружение данных о положениях разделительных элементов может быть выполнено также оператором, которое вводит данные о положениях разделительных элементов посредством интерфейса оператора, прежде чем захват начинает извлечение ценных документов из контейнера, прежде всего прежде чем захват перемещается к контейнеру для извлечения ценных документов из контейнера. Положения разделительных элементов обрабатываемого контейнера обнаруживаются оператором, например, прежде чем захват закончит извлечение ценных документов из ранее обрабатываемого контейнера. Интерфейс оператора может быть представлен интерфейсом оператора установки для обработки ценных документов или интерфейсом оператора модуля ввода установки для обработки ценных документов или интерфейсом оператора места подготовки, на котором контейнеры наполняются ценными документами и/или проверяются. Информация о положениях разделительных элементов, которая была введена оператором посредством интерфейса оператора, передается интерфейсом оператора посредством канала передачи данных (непосредственно или опосредованно) в систему управления захватом. Введенные положения разделительных элементов могут быть переданы в модуль ввода или в установку для обработки ценных документов и предоставлены там в распоряжение системе управления захватом. Однако введенные через интерфейс оператора положения разделительных элементов могут быть сразу записаны в носителе данных контейнера.
Перед извлечением ценных документов из контейнера данные о положениях разделительных элементов могут быть проверены, например на достоверность, и система управления захватом может остановить извлечение ценных документов захватом, если проверка указывает на ошибочное состояние контейнера. Ошибочное состояние может быть, например, представлено слишком большим удалением разделительных элементов, которое превосходит максимальное удаление захватных элементов захвата. Проверка достоверности может предусматривать, что положения разделительных элементов, которые были первоначально обнаружены вне области обнаружения захвата, затем второй раз обнаруживаются датчиками или датчиком изображения для проверки на пребывание обнаруженных вне области обнаружения захвата положений разделительных элементов. В рамках проверки достоверности обнаруженных положений разделительных элементов, альтернативно или дополнительно, могут быть также заданы число и/или величина областей хранения контейнера, а также произведена проверка того, соответствуют ли они числу и/или величине платежей, которые были сообщены для контейнера ранее, например, депонентом или оператором. Посредством проверки достоверности ошибки в расположении разделительных элементов обнаруживаются уже до начала извлечения ценных документов. Поскольку таким образом предотвращено только частичное опорожнение контейнеров, снижены затраты ручного труда на повторную обработку «ошибочного» контейнера.
Изобретение относится также к установке для извлечения ценных документов из контейнера, которая выполнена для осуществления соответствующего изобретению способа. Установка может быть представлена установкой для обработки ценных документов, которая имеет захват или робот для ввода банкнотов в установку для обработки ценных документов, который имеет захват, или модуль ввода, который имеет захват и выполнен для ввода банкнотов в установку для обработки ценных документов. Модуль ввода может быть присоединен к установке для обработки ценных документов таким образом, что стопки ценных документов могут быть вложены захватом из модуля ввода в установку для обработки ценных документов. Однако установка может иметь также два или более из числа этих компонентов (установку для обработки ценных документов, робот, модуль ввода), а также при необходимости, контейнерное приемное приспособление и/или транспортное устройство для транспортировки нескольких контейнеров к установке для обработки ценных документов и/или месту подготовки, на котором контейнеры подготавливаются для извлечения посредством захвата.
Установка имеет захват для извлечения содержащихся в контейнере ценных документов и систему управления захватом для управления перемещением захвата. Факультативно, захват имеет датчики, которые наблюдают за перемещением захвата в рабочем диапазоне и посылают соответствующие данные в систему управления захватом. Кроме того, установка имеет устройство, которое выполнено для получения данных о положениях разделительных элементов независимо от захвата и без использования захвата. Устройство может быть представлено интерфейсом оператора установки для обработки ценных документов или модуля ввода или места подготовки, в который вводятся данные о положениях разделительных элементов силами оператора, и который из этих данных формирует соответствующие цифровые данные. Устройство также может быть представлено коммуникационным интерфейсом (например, сетевым интерфейсом или приборным интерфейсом) установки для обработки ценных документов или модуля ввода или робота или места подготовки, который принимает данные. Устройство также может быть представлено считывающим устройством установки для обработки ценных документов или модуля ввода или робота или места подготовки, которое считывает данные из накопителя данных контейнера. Устройство соединено с системой управления захватом для передачи принятых данных о положениях разделительных элементов в систему управления захватом. Система управления захватом выполнена для управления перемещением захвата для извлечения ценных документов из контейнера соответственно переданным данным о положениях разделительных элементов таким образом, что захват в положении опускания располагается над соответствующим разделительным элементом, и что захват из положения опускания опускается в контейнер для извлечения ценных документов из контейнера.
Устройство для получения данных о положениях разделительных элементов не является составной частью захвата, а также никоим образом не соединено физически с захватом. Оно выполнено для получения подведенных (извне) данных о положениях разделительных элементов и для передачи данных о положениях разделительных элементов в систему управления захватом к моменту времени, прежде чем захват начнет извлечение ценных документов из контейнера, прежде всего прежде чем захват переместится к контейнеру для извлечения ценных документов из контейнера.
Установка может иметь также контейнерное приемное приспособление, которое принимает контейнер таким образом, что его относительное положение относительно захвата может быть предварительно задано и воспроизведено. Контейнерное приемное приспособление может быть выполнено для производимого вручную размещения в нем контейнера. Предпочтительно, контейнерное приемное приспособление имеет механическое предохранение от проворота, выполненное для обеспечения укладывания контейнера в контейнерное приемное приспособление только в правильной ориентации. Корпус контейнера имеет в таком случае соответствующую асимметрию. Тем самым обеспечено производство опорожнения областей хранения в заданной последовательности и сохранение правильного соотнесения платежей и/или соответствующих группирующих карт или разделительных карт. При определенных условиях установка имеет несколько контейнерных приемных приспособлений, что позволяет установке одновременно принимать несколько нагруженных ценными документами контейнеров. Установка может иметь также транспортное устройство, которое выполнено для транспортировки наполненных ценными документами контейнеров в область обнаружения захвата и для транспортировки контейнеров, после извлечения ценных документов захватом, вновь из области обнаружения захвата. Или также установка может быть соединена с таким транспортным устройством.
Установка может иметь также один или несколько датчиков, посредством которых автоматически обнаруживаются положения разделительных элементов контейнера, прежде чем захват переместится для извлечения ценных документов к контейнеру, прежде всего, несколько датчиков, которые расположены вдоль контейнерного приемного приспособления. Датчики расположены, например, вдоль контейнерного приемного приспособления таким образом, что в каждом случае один из датчиков расположен на каждом из возможных положений разделительных элементов установленного в контейнерное приемное приспособление контейнера. Установка может иметь считывающее устройство, выполненное для считывания данных о положениях разделительных элементов из носителя данных контейнера. Считывающее устройство может быть встроено в контейнерное приемное приспособление, однако оно может быть также расположено вне контейнерного приемного приспособления в/на установке или на транспортном контейнерном устройстве, которое транспортирует опорожняемые контейнеры в область обнаружения захвата, или на места подготовки, на которое прибывают нагруженные контейнеры для ценных документов или на котором они наполняются. Считывающее устройство может считывать данные автоматически или только после ручного приведения в действие, например, если соответствующий контейнер имеет носитель данных. Установка может также иметь коммуникационный интерфейс, который выполнен для приема данных о положениях разделительных элементов контейнера извне установки, например, сетевой интерфейс или приборный интерфейс установки для обработки ценных документов.
В последующем, изобретение разъясняется в качестве примера посредством следующих чертежей. Показано на:
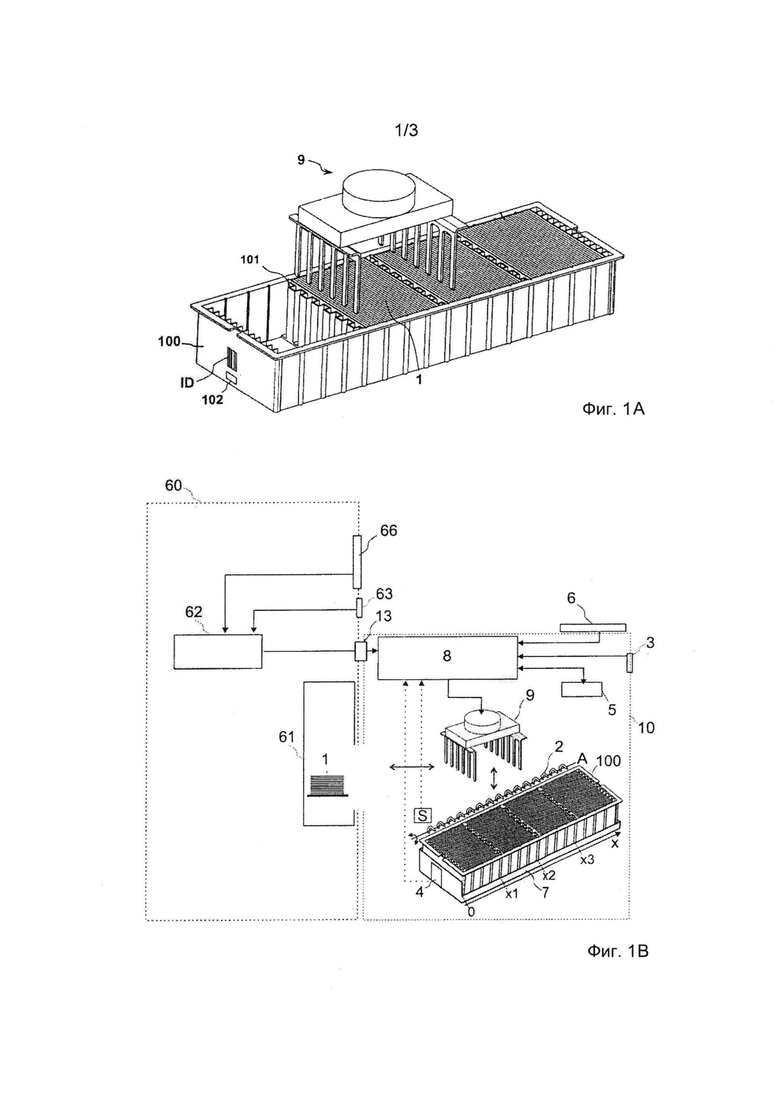
Фиг. 1А - контейнер для ценных документов с несколькими разделительными элементами и захват для извлечения ценных документов из контейнера,
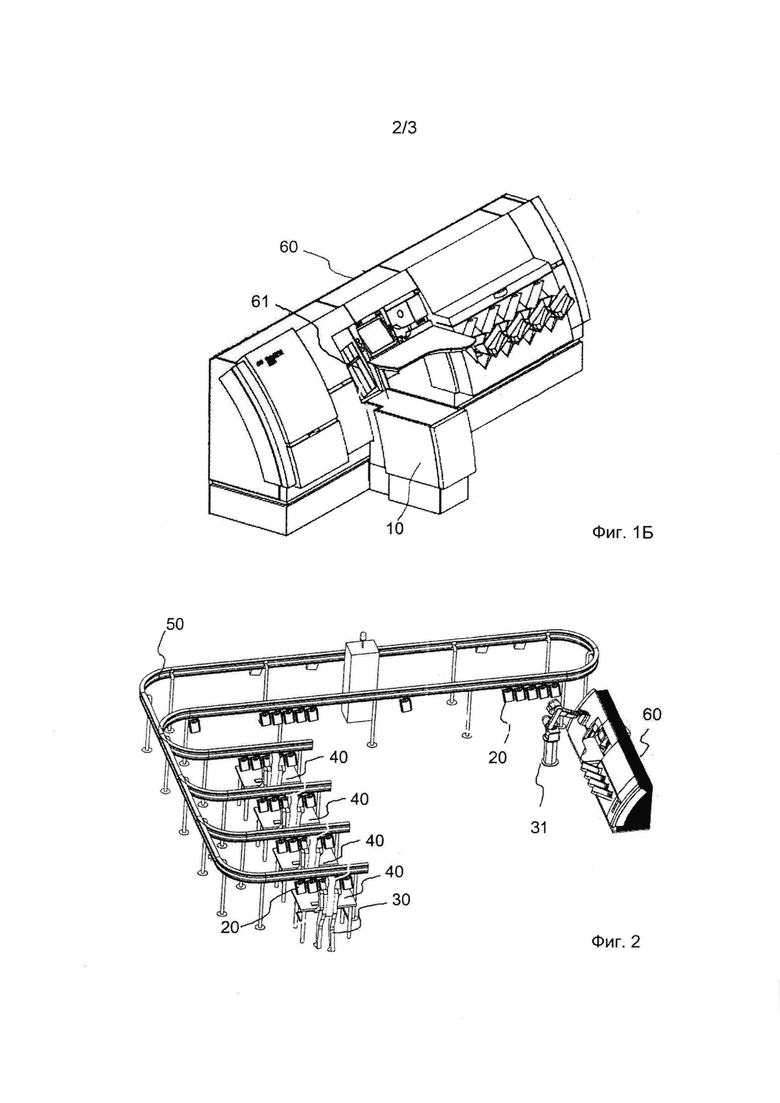
Фиг. 1Б - установка для обработки ценных документов с присоединенным к ней модулем ввода,
Фиг. 1В - извлечение ценного документа из контейнера для ценных документов в модуле ввода, который присоединен к установке для обработки ценных документов,
Фиг. 2 - установка для обработки ценных документов с роботом и транспортная система для транспортировки контейнеров для ценных документов к установке,
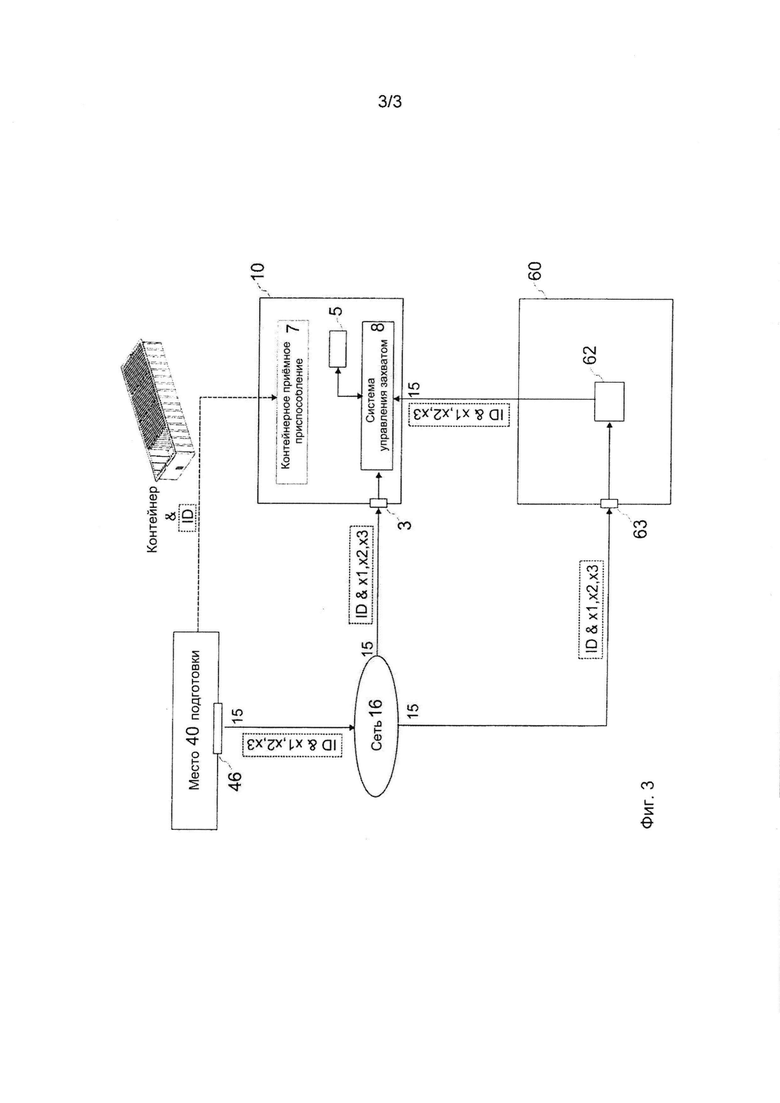
Фиг. 3 - возможный поток данных относительно данных о положениях разделительных элементов для нескольких вариантов осуществления.
Фиг. 1А показывает контейнер 100 для хранения ценных документов, в который ценные документы 1 вложены стоящими на их продольных кромках. Контейнер 100 разделен тремя разделительными элементами 101 на четыре области хранения, в которых ценные документы различных расчетных совокупностей сохранены раздельно друг от друга. Разделительные элементы 101 могут быть расположены вдоль контейнера переменным образом для приспособления величин областей хранения к стопкам ценных документов различной величины. Для этого разделительные элементы 101 могут быть вставлены на различных местах контейнера 100, на которых стенка контейнера имеет соответствующие прорези. Для извлечения ценных документов используется захват 9, который опускается в контейнер 100 для извлечения соответствующей стопки ценных документов из области хранения. Контейнер 100 имеет идентифицирующий код, например штриховой код, с помощью которого контейнер является однозначно идентифицируемым. В разновидностях контейнера с фиксированными разделительными элементами положения разделительных элементов которых известны, может быть достаточным, когда из идентифицирующего кода контейнера известна, по меньшей мере, разновидность контейнера.
Факультативно, контейнер 100 имеет носитель 102 данных, например, ответчик радиочастотной идентификации, в котором сохраняются данные о содержащихся в контейнере ценных документах 1. Они содержит, например, данные о депоненте соответствующей стопки ценных документов и, при необходимости, о числе или общей сумме ценных документов. В носителе 102 данных могут быть сохранены также данные о положениях разделительных элементов 101 контейнера 100, которые были обнаружены к более раннему моменту времени. Эти данные о положениях разделительных элементов могут быть записаны в носителе 102 данных, например, при наполнении контейнера ценными документами, например при машинном наполнении контейнера, или при производимом вручную наполнении контейнера, например депонентом ценных документов, или на месте 40 подготовки установки 60 для обработки ценных документов, ср. фиг. 2. Альтернативно, эти данные могут быть также обеспечены или быть сопряжены с доступной для считывания группирующей картой или разделительной картой, которая была вложена в начале соответствующей стопки ценных документов в контейнер.
На фиг. 1Б представлена установка 60 для обработки ценных документов, на стороне ввода которой присоединен модуль 10 ввода. Модуль 10 ввода выполнен для ввода ценных документов, например банкнотов, в короб 61 ввода устройства 60 и имеет для этой цели захват 9, который изымает стопку ценных документов из контейнера и вкладывает ее в короб 61 ввода устройства. Затем вложенные в короб ввода ценные документы 1 посредством установки 60 обособляются, транспортируются, проверяются, при необходимости сортируются, и выдаются в один или несколько выпускных коробов установки 60. Модуль 10 ввода может быть выполнен для приема нескольких контейнеров 100 для ценных документов и образовывать нечто подобное буферному накопителю для контейнеров 100. Например, модуль 10 ввода имеет транспортное устройство, которое транспортирует наполненные ценными документами контейнеры в область обнаружения захвата 9, и вновь транспортирует опорожненные контейнеры, после извлечения ценных документов захватом 9, из области обнаружения захвата 9.
На фиг. 1В показан вариант осуществления модуля 10 ввода для автоматического извлечения ценных документов из контейнера 100. Модуль 10 ввода имеет захват 9, выполненный для извлечения ценных документов 1 стопками из области хранения контейнера 100 и вкладывания их в короб 61 ввода установки 60. Контейнер 100 вкладывается для этого вручную или автоматически в контейнерное приемное приспособление 7 модуля 10 ввода. Контейнерное приемное приспособление 7 может быть оснащено считывающим устройством 4 для считывания идентифицирующего кода контейнера 100 и/или данных о положениях х разделительных элементов контейнера 100 из накопителя 102 данных контейнера. Считывающее устройство 4 передает считанные данные в систему 8 управления захватом захвата 9, которая управляет перемещением захвата 9. Данные о положениях х разделительных элементов 101 контейнера 100 находятся в распоряжении системы 8 управления захватом тем самым уже вскоре после помещения контейнера в контейнерное приемное приспособление, то есть, прежде чем захват 9 окажется перемещенным к контейнеру 100 для извлечения из него ценных документов 1. Система 8 управления захватом имеет, например, накопитель 5 данных, в котором может быть записаны данные о положениях х разделительных элементов 101. В показанном контейнере 100 эти данные содержат три х-положения x1, х2, х3, трех разделительных элементов 101 контейнера, которые отображают расстояния разделительных элементов от жесткого упора (х=0), к которому контейнер прилегает на передней стенке контейнерного приемного приспособления 7. В накопителе 5 данных эти данные о положениях x1, х2, х3 сопряжена с идентифицирующим кодом контейнера 100, а также, при необходимости, соответствующие данные для последующих контейнеров с последующими идентифицирующими кодами ID1-IDn.
Однако дополнительно или альтернативно к хранению в накопителе 102 данных контейнера, данные о положениях разделительных элементов x1, х2, х3 контейнера 100 могут быть переданы посредством сетевого интерфейса 3 модуля 10 ввода в систему 8 управления захватом. Однако, данные по x1, х2, х3 могут быть также введены оператором с помощью интерфейса 6 оператора в модуль 10 ввода и переданы им в систему 8 управления захватом. Вместо этого, также возможно получение устройством 62 управления установки 60 данных о положениях x1, х2, х3 разделительных элементов контейнера 100 через сетевой интерфейс 63 установки 60 или через интерфейс 66 оператора от оператора установки 60, и передача этих данных из установки 60 для обработки ценных документов через приборный интерфейс 13 в систему 8 управления захватом. Оператор вводит данные на соответствующем интерфейсе оператора 6, 66 к моменту времени, прежде чем начато опорожнение контейнера 100, например, во время опорожнения предыдущего контейнера посредством захвата 9. Предпочтительно, данные о положениях x1, х2, х3 разделительных элементов передаются в систему управления захватом 8 сопряженными с контейнерным идентификатором. Если эти данные уже существуют заблаговременно перед извлечением ценных документов из соответствующего контейнера, например, для нескольких опорожняемых контейнеров, система 8 управления захватом записывает переданные данные в ее накопителе 5 данных и обращается к данным о соответствующих положениях разделительных элементов только по потребности, например незадолго до того, как захват должен приблизиться к соответствующему контейнеру.
Дополнительно или альтернативно, данные о положениях разделительных элементов могут быть обнаружены также только в модуле 10 ввода с помощью датчиков модуля 10 ввода, а именно к моменту времени, прежде чем захват 9 начинает опорожнение контейнера 100. Данные о положениях x1, х2, х3 разделительных элементов контейнера 100 могут быть обнаружены, например, в то время как захват выполняет извлечение ценных документов из одного из предыдущих контейнеров, который опорожняется перед контейнером 100. На фиг. 1В показаны для этой цели в качестве примера несколько механических датчиков 2, которые расположены в заданных положениях вдоль продольного направления контейнерного приемного приспособления 7. Механические датчики 2 имеют наклонные пальцы, которые могут совместно поворачиваться вокруг оси А для проверки действительного наличия в соответствующем положении контейнера 100 разделительного элемента 101. Если соответствующий наклонный палец при поворачивании испытывает механическое сопротивление, он удерживается разделительным элементом 101 и не может следовать за отклонением остальных наклонных пальцев вокруг оси А. Соответствующий датчик 2 обнаруживает индивидуальное отклонение соответствующего наклонного пальца, например, посредством индуктивного датчика, оптического датчика и т.п. Отдельные датчики 2 соединены с системой S управления датчиками (соединение не показано), которая передает в таком случае соответствующие данные о положениях разделительных элементов контейнера 100 в систему 8 управления захватом. Вместо механических датчиков 2 могут быть использованы также электрические, акустические, оптические, магнитные или другие датчики, которые, например, аналогичным образом располагаются вдоль продольного направления контейнерного приемного приспособления 7. Альтернативно, модуль 10 ввода может иметь, однако, датчик изображения (не показан), который делает в каждом случае одно изображение последующего обрабатываемого контейнера, обнаруживает посредством обработки изображения положения разделительных элементов, и передает эти данные в систему 8 управления захватом. Поскольку с помощью вышеуказанных датчиков, или с помощью датчика изображения могут быть обнаружены данные о положениях разделительных элементов одновременно для нескольких или для всех разделительных элементов контейнера 100, получена существенная экономия времени по сравнению с последовательным обнаружением отдельных разделительных элементов.
Кроме того, обнаруженные положения разделительных элементов могут быть проверены на достоверность, прежде чем захват 9 начнет извлечение ценных документов 1. При этом проверяется, например, соответствие обнаруженных датчиками 2 числа и/или величины областей хранения с числом и/или величиной платежей. При проверке также может быть проверена способность захвата 9 к надежному извлечению в зависимости от расстояния между двумя соседними разделительными элементами, то есть, от величины области хранения. Если лежащие в основе проверки условия не выдержаны, оператор может быть инициирован к исправлению положений разделительных элементов 101 или к полному изъятию контейнера 100, и к возвращению его, например, доставщику. Другой вариант осуществления содержит функцию самотестирования механических датчиков 2. Пробными поворотами наклонных пальцев, прежде чем контейнер 100 вложен в контейнерное приемное приспособление, возможно проверять правильное функционирование датчиков 2, и при нарушении выдавать сообщение об ошибке.
На фиг. 2 представлен другой вариант осуществления, в котором для установки 60 обработки ценных документов на месте модуля 10 ввода предусмотрен робот 31, который имеет захват для извлечения ценных документов из контейнеров 20 и вкладывания их в короб 61 ввода установки 60. Робот может быть выполнен автономным или быть частью установки 60. Нагруженные ценными документами контейнеры 20 транспортируются посредством транспортной системы 50 к установке 60 в область обнаружения захвата робота. После извлечения ценных документов захватом робота пустые контейнеры 20 снова отводятся транспортной системой 50 от робота и транспортируются обратно на места 40 обработки. На местах 40 обработки контейнеры 20 подготавливаются оператором 30 для автоматического извлечения ценных документов. Подготовка содержит, например, шаги поверки контейнеров, если контейнеры прибывают на места подготовки уже нагруженными ценными документами, и/или помещения группирующей карты или разделительной карты в начале соответствующей стопки ценных документов. Однако наполнение контейнеров также может выполняться только уже на местах 40 подготовки. Силами соответствующего оператора 30 подготовка содержит, например, также шаг обнаружения положений разделительных элементов, которые фиксированы в контейнере 20 или привнесены переменным образом или привносятся только уже оператором 30. Для этого оператор вводит положение разделительного элемента, например, посредством интерфейса 46 оператора места 40 подготовки, ср. фиг. 3. При этом формируется цифровая информация о положениях х разделительных элементов соответствующего контейнера, которая связывается с контейнерным идентификатором соответствующего контейнера. С помощью связывания при последующем извлечении ценных документов могут быть заданы посредством контейнерного идентификатора принадлежащие данные о положениях разделительных элементов соответственно опорожняемому контейнеру.
Робот 31 имеет систему 8 управления захватом, которая обладает каналом передачи данных (например, беспроводным) к установке 60 и/или к местам 40 обработки, посредством которого в систему 8 управления захватом могут быть переданы данные о положениях x1, х2, х3 разделительных элементов, сопряженные с контейнерным идентификатором. Передача данных в систему 8 управления захватом может быть произведена, как только оператор 30 обнаружил положения разделительных элементов 101 и ввел их в виде сопряженных с контейнерным идентифицирующим кодом данных на местах 40 обработки. Система 8 управления захватом записывает переданную информацию в ее накопителе 5 данных для того, чтобы иметь возможность снова к ней обратиться, как только соответствующий контейнер должен быть опорожнен посредством захвата робота.
Фиг. 3 показывает возможный поток данных, образованной данными о положениях разделительных элементов, для нескольких вариантов осуществления, в которых положения разделительных элементов обнаруживаются на пространственном отдалении от модуля 10 ввода и установки 60 для обработки ценных документов. Пространственно удаленное положение является, например, местом 40 подготовки, которое оснащено интерфейсом 46 оператора, примерно как место подготовки согласно фиг. 2, или офисом депонента. На месте 40 подготовки оператор посредством интерфейса 46 оператора вводит положения разделительных элементов, сопряженные с контейнерным идентификатором соответствующего контейнера. Оператор может вводить положения разделительных элементов либо индивидуально для соответствующего контейнера, либо соотносить соответствующий контейнер с одной из нескольких заданных разновидностей контейнера, положения разделительных элементов которых предварительно известны.
Затем произведенные в пространственно удаленном положении цифровые данные о сопряженных с контейнерным идентификатором положениях х разделительных элементов соответствующего контейнера посылаются посредством каналов 15 передачи данных в сеть 16, из которой данные передаются, например, непосредственно через сетевой интерфейс 3 в систему 8 управления захватом. Альтернативно, данные о сопряженных с контейнерным идентификатором положениях х разделительных элементов могут быть переданы также из сети 16 в сетевой интерфейс 63 установки 60 для обработки ценных документов, от которого данные посылаются далее управляющим устройством 62 в систему 8 управления захватом. Если соответствующий контейнер 100 доставляется затем в более поздний момент времени из пространственно удаленного положения, и принимается в контейнерное приемное приспособление 7 модуля 10 ввода, принадлежащие этому контейнеру данные о положениях х разделительных элементов уже находятся в распоряжении. Доставленному контейнеру 100 в таком случае правильные данные о положениях разделительных элементов соотносятся с помощью его контейнерного идентификатора. Для этого контейнерный идентификатор доставленного контейнера 100 считывается посредством считывающего устройства 4 накопителя данных, и производится поиск этого контейнерного идентификатора в накопителе 5 данных системы управления захватом. Из числа положений разделительных элементов, которые сопряжены в накопителе 5 данных с сохраненными контейнерными идентификаторами ID1-IDn, изымаются те положения x1, х2, х3 разделительных элементов, которые сопряжены с контейнерным идентификатором доставленного контейнера 100. Система 8 управления захватом тогда использует изъятые из накопителя 5 данных данные для управления захватом 9 при извлечении ценных документов из доставленного контейнера 100. Эти данные могут быть использованы также как основа для проверки достоверности обнаруженных датчиками 2 положений разделительных элементов.
Настоящее изобретение относится к автоматическому извлечению ценных документов из контейнера с помощью захвата. Для разделения различных стопок ценных документов контейнер разделен разделительными элементами на несколько областей хранения. Так как положения разделительных элементов различных контейнеров для ценных документов могут быть различными, для соответственно обрабатываемого контейнера проводят обнаружение, в каких положениях вдоль контейнера расположены разделительные элементы. Обнаружение положений разделительных элементов происходит независимо от захвата к моменту времени, прежде чем захват перемещают к контейнеру. Данные о принадлежащих контейнеру положениях разделительных элементов передают в систему управления захвата, которая выполнена для управления перемещением захвата для извлечения ценных документов из контейнера. Таким образом, обеспечивается увеличение скорости извлечения стопок ценных документов из контейнера. При этом благодаря одновременному определению нескольких положений разделительных элементов исключается необходимость прогона захвата по всем возможным положениям разделительных элементов. 2 н. 16 з.п. ф-лы, 5 ил.
1. Способ извлечения ценных документов (1) из контейнера (100) с помощью захвата (9), который выполнен для извлечения содержащихся в контейнере ценных документов (1), включающий:
- обеспечение контейнера (100), который открыт с одной стороны и разделен разделительными элементами (101) на несколько областей хранения для ценных документов,
- обнаружение того, в каких положениях (х) вдоль контейнера (100) расположены разделительные элементы (101), причем положения (х) разделительных элементов (101) обнаруживают автоматически и независимо от захвата, обнаруживая одновременно положения (х) нескольких разделительных элементов (101) соответствующего контейнера (100),
- передачу данных о принадлежащих контейнеру (100) положениях (х) разделительных элементов в систему управления (8) захватом, которая выполнена для управления перемещением захвата (9),
- перемещение захвата (9) для извлечения ценных документов (1) из контейнера (100), причем система (8) управления захватом управляет перемещением захвата (9) соответственно полученным данным о положениях (х) разделительных элементов таким образом, что захват (9) в положении опускания располагается над соответствующим разделительным элементом (101) и опускается из положения опускания в контейнер для извлечения ценных документов (1) из контейнера (100).
2. Способ по п. 1, отличающийся тем, что обнаружение положений (х) разделительного элемента выполняют к моменту времени, прежде чем захват (9) перемещают к контейнеру (100) для извлечения ценных документов из контейнера.
3. Способ по п. 1, отличающийся тем, что положения (х) разделительных элементов контейнера (100) одновременно обнаруживают автоматически для всех разделительных элементов (101) соответствующего контейнера, прежде чем захват (9) начинает извлечение ценных документов из контейнера (100), в частности прежде чем захват (9) перемещают к контейнеру (100) для извлечения ценных документов из контейнера.
4. Способ по одному из пп. 1-3, отличающийся тем, что положения (х) разделительных элементов автоматически обнаруживают с помощью одного или нескольких датчиков, прежде всего с помощью нескольких датчиков (2), расположенных вдоль контейнерного приемного приспособления (7), в которое вкладывают контейнер (100) для извлечения ценных документов.
5. Способ по п. 4, отличающийся тем, что датчики (2) расположены вдоль контейнерного приемного приспособления (7), и каждое из возможных положений (х) разделительных элементов установленного в контейнерном приемном приспособлении (7) контейнера (100) проверяют посредством в каждом случае одного из датчиков (2) на то, действительно ли имеется в наличии в контейнере (100) разделительный элемент (101) в соответствующем возможном положении (х) разделительного элемента, причем поверку возможных положений разделительного элемента выполняют, прежде чем захват (9) начинает извлечение ценных документов из контейнера (100), прежде всего прежде чем захват (9) перемещают к контейнеру (100) для извлечения ценных документов из контейнера (100).
6. Способ по одному из пп. 1-3, отличающийся тем, что положения (х) разделительного элемента автоматически обнаруживают с помощью датчика изображения, который формирует изображение установленного в контейнерном приемном приспособлении (7) контейнера (100), и что из полученного изображения обнаруживают положения разделительных элементов, прежде чем захват (9) начинает извлечение ценных документов из контейнера, прежде всего прежде чем захват (9) перемещают к контейнеру (100) для извлечения ценных документов из контейнера.
7. Способ по одному из пп. 1-3, отличающийся тем, что данные о положениях (х) разделительных элементов обнаруживают вне области обнаружения захвата (9) и сохраняют их в носителе (102) данных контейнера (100), и что данные о положениях (х) разделительных элементов считывают из носителя (102) данных контейнера считывающим устройством (4) и передают в систему (8) управления захватом, прежде чем захват (9) начинает извлечение ценных документов из контейнера, прежде всего прежде чем захват (9) перемещают к контейнеру (100) для извлечения ценных документов из контейнера.
8. Способ по одному из пп. 1-3, отличающийся тем, что данные о положениях (х) разделительных элементов обнаруживают вне области обнаружения захвата (9) и сопрягают их с контейнерным идентификатором (ID) соответствующего контейнера, и что контейнерный идентификатор (ID) совместно с сопряженными с ним данными о положениях (х) разделительных элементов передают в систему (8) управления захватом посредством канала (15) передачи данных, прежде чем захват начинает извлечения ценных документов из контейнера, прежде всего прежде чем захват (9) перемещают к контейнеру (100) для извлечения ценных документов из контейнера.
9. Способ по одному из пп. 1-3, отличающийся тем, что для нескольких контейнеров в каждом случае контейнерный идентификатор (ID, ID1-IDn) и положения разделительных элементов сохраняют в накопителе (5) данных таким образом, что соответствующие положения (х) разделительных элементов сопряжены с соответствующим контейнерным идентификатором (ID, ID1-IDn), и
что до начала извлечения ценных документов из обрабатываемого контейнера контейнерный идентификатор (ID) обрабатываемого контейнера (100) считывают считывающим устройством (4), и
что из содержащихся в накопителе (5) данных и сопряженных с соответствующими положениями (х) разделительных элементов контейнерных идентификаторов (ID1-IDn) выбирают сопряженные со считанным контейнерным идентификатором (ID) обрабатываемого контейнера (100) положения (х) разделительных элементов, прежде чем захват (9) начинает извлечение ценных документов из контейнера, прежде всего прежде чем захват перемещают к контейнеру (100) для извлечения ценных документов.
10. Способ по одному из пп. 1-3, отличающийся тем, что данные о положениях (х) разделительных элементов обнаруживают посредством оператора, и оператор осуществляет ввод данных о положениях разделительных элементов на интерфейсе (6, 46, 66) оператора, прежде чем захват (9) начинает извлечение ценных документов из контейнера, прежде всего прежде чем захват перемещают к контейнеру для извлечения ценных документов из контейнера, например прежде чем захват закончил извлечение ценных документов из ранее обрабатываемого контейнера.
11. Способ по одному из пп. 1-3, отличающийся тем, что перед извлечением ценных документов из контейнера данные о положениях (х) разделительных элементов проверяют, прежде всего проверяют на достоверность, и извлечение ценных документов захватом останавливают, если проверка, прежде всего проверка на достоверность, указывает на ошибочное состояние контейнера.
12. Установка (10, 60, 31) для извлечения ценных документов из контейнера, который открыт с одной стороны и подразделен посредством разделительных элементов (101) на несколько областей хранения для ценных документов,
причем установка содержит:
- захват (9) для извлечения содержащихся в контейнере (100) ценных документов (1),
- систему (8) управления захватом для управления перемещением захвата (9),
- по меньшей мере один датчик, обеспечивающий автоматическое обнаружение положений (х) разделительных элементов контейнера с возможностью одновременного обнаружения положений (х) нескольких разделительных элементов (101) соответствующего контейнера (100),
- устройство (6, 46, 66, 3, 63, 4, 13), которое выполнено для приема данных о положениях разделительных элементов (101) независимо от захвата (9) и которое соединено с системой (8) управления захватом для передачи принятых данных о положениях разделительных элементов (101) в систему (8) управления захватом,
причем система (8) управления захватом выполнена для управления перемещением захвата (9) соответственно переданным данным о положениях (х) разделительных элементов для извлечения ценных документов из контейнера (100) таким образом, что захват (9) в положении опускания располагается над соответствующим разделительным элементом (101) и опускается из положения опускания в контейнер для извлечения ценных документов (1) из контейнера (100).
13. Установка по п. 12, отличающаяся тем, что установка имеет контейнерное приемное приспособление (7), на котором контейнер (100) установлен таким образом, что его положение относительно захвата (9) является предварительно заданным и воспроизводимым.
14. Установка по п. 12, отличающаяся тем, что устройство является считывающим устройством (4), которое выполнено для считывания данных о положениях (х) разделительных элементов из носителя (102) данных установленного в контейнерном приемном приспособлении (7) контейнера (100).
15. Установка по п. 12, отличающаяся тем, что устройство является коммуникационным интерфейсом (3, 13, 63), которое выполнено для приема данных о положениях (х) разделительных элементов контейнера извне установки.
16. Установка по п. 12, отличающаяся тем, что устройство является интерфейсом (6, 46, 66) оператора, в которое оператором могут быть введены данные о положениях разделительных элементов и которое может формировать из этих данных соответствующие цифровые данные.
17. Установка по одному из пп. 12-16, отличающаяся тем, что по меньшей мере один датчик выполнен с возможностью обнаружения положений (х) разделительных элементов контейнера, прежде чем захват перемещается к контейнеру.
18. Установка по одному из пп. 12-16, отличающаяся тем, что установка имеет несколько датчиков (2), которые расположены вдоль контейнерного приемного приспособления, причем датчики (2) расположены, прежде всего, вдоль контейнерного приемного приспособления (7) таким образом, что датчики (2) могут одновременно обнаруживать несколько положений (х) разделительных элементов установленного в контейнерном приемном приспособлении контейнера (100).
| WO 2011036157 A1, 31.03.2011 | |||
| US 5186303 A, 16.02.1993 | |||
| RU 2005103614 A, 27.02.2006 | |||
| СПОСОБ ПОВЕРХНОСТНОГО МОНТАЖА ЭЛЕКТРОРАДИОИЗДЕЛИЙ РАДИОЭЛЕКТРОННОЙ АППАРАТУРЫ | 2018 |
|
RU2698306C2 |

