Изобретение относится к области робототехники, в частности, к промышленным манипуляционным роботам (роботам-манипуляторам), применяемым в автоматизированных счетно-сортировальных комплексах (которые также могут называться роботизированными ячейками, системами, участками и т.п.), предназначенных для обработки листового материала, в частности, банкнот или ценных бумаг. Роботы-манипуляторы обеспечивают возможность захватывания и удерживания листового материала, например, банкнот (стопок и/или отдельных листов), а также возможность перемещения удерживаемого объекта из исходной точки в заданную целевую точку.
Заявляемое техническое решение может быть использовано при разработке конструкции рабочего органа робота робототехнической системы, а именно, захватного устройства робота-манипулятора, предназначенного, в частности, для использования в роботизированной ячейке (комплексе) для обработки банкнот.
Захватным устройством промышленного робота (робота-манипулятора) называется рабочий орган промышленного робота для захватывания и удерживания в определенном положении предмета производства [ГОСТ 26063-84 «Роботы промышленные. Устройства захватные. Типы, номенклатура основных параметров, присоединительные размеры», Приложение].
Предмет, который захватывается и удерживается в определенном положении захватным устройством робота-манипулятора, называют объектом манипулирования [Захватные устройства промышленных роботов. Учебное пособие. К.А. Украженко и др., Ярославль: Изд-во ЯГТУ, 2007, с. 4].
Рабочим элементом захватного устройства называется элемент, вступающий непосредственно в контакт с объектом манипулирования [Захватные устройства промышленных роботов. Учебное пособие. К.А. Украженко и др., Ярославль: Изд-во ЯГТУ, 2007, с. 5].
Для захватывания и удерживания объекта манипулирования используются различные типы захватных устройств: механические, вакуумные, магнитные, прочие [п. 2 ГОСТ 26063-84 «Роботы промышленные. Устройства захватные. Типы, номенклатура основных параметров, присоединительные размеры»].
В механических захватных устройствах удерживание объекта осуществляется под действием реакций в зонах контакта с рабочими элементами. Механические захватные устройства разделяются на схваты, которые удерживают объект посредством зажима рабочими элементами при их перемещении двигателем, и поддерживающие, которые представляют собой опоры. Для механических схватов (которые относятся к зажимным захватным устройствам) рабочими элементами являются губки, пальцы, клещи и т.п., которые удерживают объект за счет сил трения, возникающих при зажиме, или комбинации сил трения и запирающих усилий.
В вакуумных захватных устройствах (которые относятся к притяжным захватным устройствам) удерживание объекта осуществляется посредством разрежения воздуха в замкнутой полости рабочего элемента. Для вакуумных захватных устройств рабочим элементом является контактирующая с объектом вакуумная присоска, ограничивающая полость разрежения воздуха. При этом следует отметить, что вакуумный захват используется только для плоских и ровных поверхностей.
Для магнитных захватных устройств рабочими элементами являются элементы магнитной системы, к которой притягивается объект [Захватные устройства промышленных роботов. Учебное пособие. К.А. Украженко и др., Ярославль: Изд-во ЯГТУ, 2007, с. 5-6].
При обработке листового материала (например, банкнот) для выполнения большинства операций, связанных с выемкой из контейнеров и перемещением в заданную точку стопки листового материала (или отдельных листов) обычно используют механические зажимные захватные устройства.
Вакуумные захватные устройства обычно используют для захватывания отдельного листа, например, при выполнении операций пересчета в счетно-сортировальной машине (ССМ), связанных с поштучным отделением листов из стопки.
В процессе извлечения стопки банкнот из контейнеров (лотков), а также в процессе перемещения удерживаемых банкнот в заданную целевую точку невозможно гарантированно исключить выпадение отдельных листов (банкнот) из удерживающего их захватного устройства.
В реальных условиях возможно выпадение банкноты из удерживаемой и перемещаемой стопки вследствие того, что одна из банкнот оказалась заломленной (сложенной) и не попала в область прижима рабочих элементов, также возможно выпадение банкноты вследствие ее ветхого состояния и т.п.
Зачастую утеря (выпадение из захвата) одной или нескольких купюр обнаруживается после завершения обработки всей партии банкнот (одного или нескольких депозитов) в роботизированной ячейке, например, при визуальном осмотре оператором модуля ячейки, и в случае обнаружения (например, на полу) выпавшей банкноты требуется распаковка всех корешков и повторный пересчет всего объема банкнот, обработанных за смену, в счетно-сортировальной машине с выполнением всех последующих операций, что существенно увеличивает время выполнения всей технологической цепочки пересчета и обработки партии банкнот.
Если на всех стадиях технологического процесса обработки банкнот предусмотрено выполнение оператором контрольной функции, то при обнаружении выпавшей (утерянной) банкноты оператор должен войти внутрь ячейки, для чего согласно технике безопасности необходимо отключить оборудование, изъять выпавшую банкноту или несколько банкнот, а затем, как описано выше, расформировать уже обработанные и обвязанные корешки, заполнить банкнотами лотки загрузки и снова выполнить пересчет и обработку всей партии банкнот.
В связи с указанными выше факторами актуальной задачей при разработке новых конструкций захватных устройств роботов-манипуляторов, предназначенных, в частности, для использования в роботизированных ячейках (комплексах) для обработки листового материала (банкнот, денежной наличности), является создание захватного устройства робота-манипулятора, обеспечивающего возможность в автоматическом режиме осуществлять захватывание из контейнеров/емкостей с последующим удерживанием и перемещением в заданную точку стопок листового материала или отдельных листов, а также в случае выпадения из захватного устройства отдельного листа или нескольких отдельных листов осуществлять их поштучный подбор и удерживание с последующим перемещением в отдельный контейнер.
Известны конструкции клешневых захватных устройств (захватов) роботов-манипуляторов, используемых в модулях кассового или банковского обслуживания, например, по пат. заявке № JPS62211244A [«Cash transaction device», МПК B65H31/30, B65H5/10, G07D9/00, дата публ. заявки 17.09.1987], по патенту № RU170339U1 [«Роботизированное устройство для кредитного и торгово-розничного обслуживания», МПК G07F19/00, дата публ. 21.04.2017], по патенту № RU2610108C2 [«Устройство киоска банковского самообслуживания», МПК G07F19/00, дата публ. 07.02.2017], в которых рабочие элементы осуществляют захватывание и удерживание объекта, перемещение с удерживаемым объектом подвижным средством (рукой робота-манипулятора) внутри корпуса модуля от исходной точки до заданной целевой точки, где освобождают объект. Как отмечалось ранее, в реальных условиях при перемещении стопки листового материала (стопки банкнот) возможно выпадение одной или нескольких банкнот. Выпадение отдельных листов (или банкнот) из перемещаемой стопки обычно фиксируется оператором или датчиком, иначе функционирование модуля будет некорректным. Однако в известных технических решениях не предусмотрена возможность автоматического поднятия выпавшего из перемещаемой стопки листа (банкноты). Для поднятия выпавшего объекта необходимо вмешательство оператора - остановка работы всего комплекса оборудования и подбор объекта вручную, что усложняет технологический процесс и существенно увеличивает время цикла обслуживания (обработки).
Известна конструкция захватного устройства манипулятора [патент № CN207240229U «A manipulator tail end actuator for ATM software automatically detects quick-wittedly», МПК B65J15/00, дата публ. 17.04.2018], предназначенного для захвата банкнот или банковской карты, содержит два рабочих зажимных элемента, выполненных в виде губок. Также известна конструкция захватного устройства [патент № CN206108338U «Press from both sides paper money transport mechanism», МПК B65G47/90, дата публ. 19.04.2017], содержащего две вертикально расположенные зажимные губки, банкноты между которыми удерживаются за счет силы трения. При перемещении стопки банкнот возможно выпадение отдельных банкнот, при этом выпавшие банкноты (листы) обычно остаются лежать на горизонтальной поверхности: на полу ячейки (модуля), на поверхности какого-либо из узлов и пр. В известных технических решениях не предусмотрена возможность захвата и поднятия выпавшего листа с плоской поверхности, так как механические зажимные рабочие элементы конструктивно предназначены только для извлечения стопки листового материала из лотков (контейнеров), когда обеспечен свободный доступ к стопке листов с обеих сторон, по которым происходит захватывание объекта. В данных обстоятельствах подбор упавших банкнот также возможен с помощью оператора при полной остановке работы оборудования либо с помощью отдельного притяжного захватного устройства, например, вакуумного захватного устройства, рабочим элементом которого является вакуумная присоска.
Таким образом, описанные выше известные захватные устройства не предусматривают возможности подбора, то есть захватывания и удерживания, отдельных выпавших листов (банкнот), что сужает функциональные возможности известных захватных устройств.
Для поднятия листового материала с плоской поверхности, его удерживания и перемещения целесообразно применять вакуумные захваты, так как по сравнению с другими притяжными захватными устройствами (магнитными, электростатическими, адгезионными и т.д.) они характеризуются конструктивной простотой и более высокой надежностью.
Известны конструкции промышленных роботов, применяемые в машиностроении, захватные устройства которых снабжены вакуумными держателями, используемые для автоматического захвата и ориентированной подачи (перемещения) плоских деталей на рабочую поверхность для обработки технологическим инструментом, например:
промышленный робот с вакуумным захватом [патент № RU100448U1 «Консольный промышленный робот для обработки листовых материалов», МПК B25J9/00, B25J15/06, дата публ. 20.12.2010],
манипулятор с вакуумным захватом для механизированной подачи заготовок в рабочую машину [патент № RU2099176С1 «Манипулятор с вакуумным захватом», МПК B25J9/10, B25J15/06, дата публ. 20.12.1997], в котором разрежение воздуха в вакуумном блоке создается эжектором,
механизм с вакуумным захватом для перемещения деталей [патент № RU190461U1 «Механизм с вакуумным захватом для перемещения деталей от одного механизма к другому в комплекте учебного оборудования для монтажа, наладки и эксплуатации автоматических линий и мехатронных систем», МПК B25J15/06, B23Q7/04, дата публ. 01.07.2019], в котором вакуумный захват крепится на поворотном рычаге, а вакуумное разрежение создается эжектором.
Однако описанные выше механизмы захватных устройств снабжены только вакуумным рабочим элементом - вакуумной присоской, и не содержат механических зажимных рабочих элементов.
Известно «Устройство для отделения банкнот из пачки» [патент № RU2194001С1, МПК B65H3/48, дата публ.: 10.12.2002], которое предназначено для разборки пачек банкнот и их поштучной подачи в тракт сортировочной машины. Однако известное устройство не предусматривает возможности захвата стопок листового материал (банкнот), а также возможности подбора выпавших из стопки отдельных банкнот.
Известно, что захватное устройство иногда снабжают сменными узлами рабочих элементов различных типов (губками, присосками и т.п.), замена которых производится в зависимости от выполняемой роботом операции [Захватные устройства промышленных роботов. Учебное пособие. К.А. Украженко и др. - Ярославль: Изд-во ЯГТУ, 2007, с. 4]. Однако, замена узла рабочих элементов усложняет весь технологический процесс, так как требует остановки всего оборудования ячейки, съема одного рабочего узла, установки другого, а также настройки (наладки) вновь установленного узла.
В качестве технического решения (прототипа), конструктивно наиболее близкого к заявляемому техническому решению, предлагается захватное устройство робота-манипулятора, известное по патенту № RU184884U1 [«Захват для роботизированного манипулятора», МПК B65J15/00, G07F19/00, G07D11/00, дата публ. 13.11.2018], предназначенное для использования в составе роботизированных манипуляторов, служащих для перемещения денежных банкнот (листового материала). Захватное устройство содержит зажимные рабочие элементы - верхнюю (подвижную) и нижнюю (неподвижную) губки. Перемещение верхней губки (подвижного рабочего элемента) осуществляется с помощью первого пневмопривода, на котором закреплен держатель верхней губки. На держателе закреплены каретки, установленные на направляющих, соединенных с верхним и нижним торцами первого пневмоцилиндра. Нижняя губка захвата, являющаяся неподвижным рабочим элементом, выполнена в виде фланца с двумя штифтами. Устройство также содержит ограничитель раскрытия захвата, связанный со вторым пневматическим цилиндром при помощи вилки, соединенной со штоком второго пневматического цилиндра. Ограничитель обеспечивает возможность как полного, так и неполного раскрытия зажимных рабочих элементов захвата для захватывания и удерживания банкнот. Значение неполного (промежуточного) раскрытия рабочих элементов является регулируемым параметром, регулировку которого необходимо осуществлять заранее, как отдельную технологическую операцию, что не позволяет осуществлять раскрытие (разведение) рабочих элементов на конкретную, заданную величину в автоматическом режиме в зависимости от габаритов объекта, с которым взаимодействует захватное устройство в конкретный момент времени. Следует обратить внимание, что применение в известном техническом решении двух пневмоцилиндров значительно увеличивает габариты захватного устройства. В качестве недостатка известного технического решения следует отметить, что также как и в описанных выше известных конструкциях, в конструкции захватного устройства по патенту № RU184884U1 не предусмотрено одновременное выполнение узла механических зажимных рабочих элементов и узла вакуумного держателя (вакуумной присоски), что ограничивает функциональные возможности устройства при его использовании в составе роботизированной ячейки для обработки листового материала (банкнот).
Техническим результатом, на достижение которого направлено заявляемое техническое решение, является расширение функциональных возможностей захватного устройства (за счет выполнения в составе захватного устройства как зажимных рабочих элементов, так и вакуумного держателя).
Для достижения указанного выше технического результата предлагается захватное устройство, которое содержит несущий элемент, линейный электрический привод, соединенный с несущим элементом, и зажимные рабочие элементы, выполненные с возможностью изменения расстояния между ними. Один из зажимных рабочих элементов соединен с исполнительным элементом линейного электрического привода с возможностью линейного перемещения совместно с упомянутым исполнительным элементом. Другой зажимной рабочий элемент неподвижно соединен с несущим элементом. Захватное устройство дополнительно снабжено по меньшей мере одним вакуумным держателем.
Выполнение зажимных рабочих элементов так, как описано выше (соединение одного из рабочих элементов с исполнительным элементом линейного электропривода с возможностью линейного перемещения, неподвижное соединение другого рабочего элемента с несущим элементом устройства), обеспечивает возможность осуществления захватывания из контейнера объекта - стопки листового материала или листа, а также его удерживание при перемещении в заданную точку. При этом использование линейного электропривода, с которым соединен один из рабочих элементов, обеспечивает уменьшение габаритов захватного устройства (по сравнению с прототипом, в котором использованы пневмоприводы), а габаритные характеристики являются значимым фактором для оборудования, в состав которого входит заявляемое захватное устройство, а именно, для роботизированных ячеек, предназначенных для обработки банкнот.
Предлагаемое выполнение захватного устройства в случае наличия выпавшего, например, на пол роботизированной ячейки (или на поверхность какого-либо оборудования, входящего в состав ячейки), одного или нескольких листов (банкнот) из перемещаемой стопки обеспечивает возможность осуществления автоматического подбора (захватывания) и удерживания выпавшего листа с последующим его перемещением в предназначенный для этого контейнер. Данная возможность, обеспечиваемая предлагаемым конструктивным выполнением захватного устройства, дополнительно снабженного по меньшей мере одним вакуумным держателем, позволяет при работе устройства в составе роботизированной ячейки выполнить автоматический подбор и перемещение выпавшей банкноты (листа) в соответствующий контейнер, не осуществляя при этом остановку работы оборудования роботизированной ячейки и исключая необходимость личного выполнения оператором внутри ячейки изъятия (подбора) выпавшей банкноты (листа).
Таким образом, по сравнению с прототипом, заявляемое техническое решение обеспечивает возможность захватывания и удерживания листового материала не только с помощью механических зажимных рабочих элементов, но и с помощью вакуумного держателя, что обеспечивает расширение функциональных возможностей устройства. Захватное устройство при этом представляет собой комбинированное вакуумно-механическое захватное устройство робота-манипулятора.
Несущий элемент конструкции устройства должен обеспечивать возможность установки и крепления деталей и узлов устройства, их требуемое взаимное положение. Несущим элементом конструкции устройства обычно является корпус устройства, так как он обеспечивает возможность размещения и закрепления деталей и узлов устройства, а также обеспечивает выполнение таких функций как пыле- и влагозащищенность, восприятие ударных и инерционных нагрузок, силы реакции опор и др. Следует отметить, что также возможно выполнение несущего элемента в виде каркаса, опорной стойки и пр.
В качестве линейного электрического привода может быть использован электромеханический штоковый линейный актуатор, как наиболее распространенный тип линейного электропривода. Штоковые актуаторы характеризуются простым конструктивным выполнением, компактностью, высокой надежностью работы, широким диапазоном характеристик. Подвижным элементом в этих актуаторах является шток, представляющий собой телескопическую трубку, обычно круглого сечения. В сложенном состоянии шток находится внутри корпуса, а при необходимости выдвигается из него. При работе обеспечивается точное, управляемое возвратно-поступательное движение типа «тяни-толкай», выполняемое штоком, с которым соединены зажимные рабочие элементы захватного устройства.
Предпочтительным выполнением зажимных рабочих элементов для удерживания листового материала (в частности, банкнот) представляется их выполнение в виде губок, так как в этом случае обеспечивается наибольшая площадь контактной поверхности, что повышает надежность захвата.
Для обеспечения возможности взаимодействия с контейнерами (лотками) и другими элементами роботизированных ячеек, имеющих различные конструктивные параметры (геометрическую форму, размеры), зажимные рабочие элементы могут быть выполнены сменными.
В качестве вакуумного держателя обычно используется вакуумная присоска, представляющая собой готовое стандартное изделие с широким диапазоном параметров и характеристик.
Захватное устройство может быть снабжено двумя вакуумными держателями (вакуумными присосками) для повышения надежности захвата листового материала (выпавшей банкноты), а также для обеспечения возможности подбора (захватывания) выпавшего листа из труднодоступных мест. Например, в случае нахождения выпавшей банкноты рядом с вертикальной поверхностью захватное устройство, снабженное одним вакуумным держателем (расположенным с одного края захватного устройства), не сможет осуществить подбор банкноты так как габариты захватного устройства (превышающие габариты банкноты) не позволят осуществить должное позиционирование вакуумного держателя в пространстве (непосредственно над банкнотой). В то время как наличие двух вакуумных держателей (расположенных на разных краях захватного устройства) снимает указанные ограничений и позволяет "дотянуться" до банкноты хотя бы одним из вакуумных держателей.
Оптимальным размещением вакуумных держателей (вакуумных присосок), при котором требуется минимальное количество перемещений захватного устройства для захватывания рабочими элементами выпавшего листа (банкноты), представляется такое, при котором вакуумные держатели (вакуумные присоски) установлены таким образом, что их рабочие полости, предназначенные для создания в них разрежения воздуха, расположены со стороны нерабочей, свободной, поверхности нижнего зажимного рабочего элемента, неподвижно соединенного с несущим элементом, и обращены в сторону от указанной свободной поверхности зажимного рабочего элемента.
Для дополнительного обеспечения большей маневренности при захватывании выпавшего листа (банкноты) вакуумные держатели (вакуумные присоски) могут быть расположены по разные боковые стороны нижнего зажимного рабочего элемента, неподвижно соединенного с несущим элементом.
Так как захватное устройство должно быть закреплено к выходному звену руки робота-манипулятора, то несущий элемент может быть дополнительно снабжен переходным фланцем, предназначенным для присоединения к руке робота-манипулятора, что позволит обеспечить повышение надежности крепления, повысить технологичность выполнения сборочных операций.
Графические материалы содержат пример выполнения заявляемого захватного устройства робота-манипулятора.
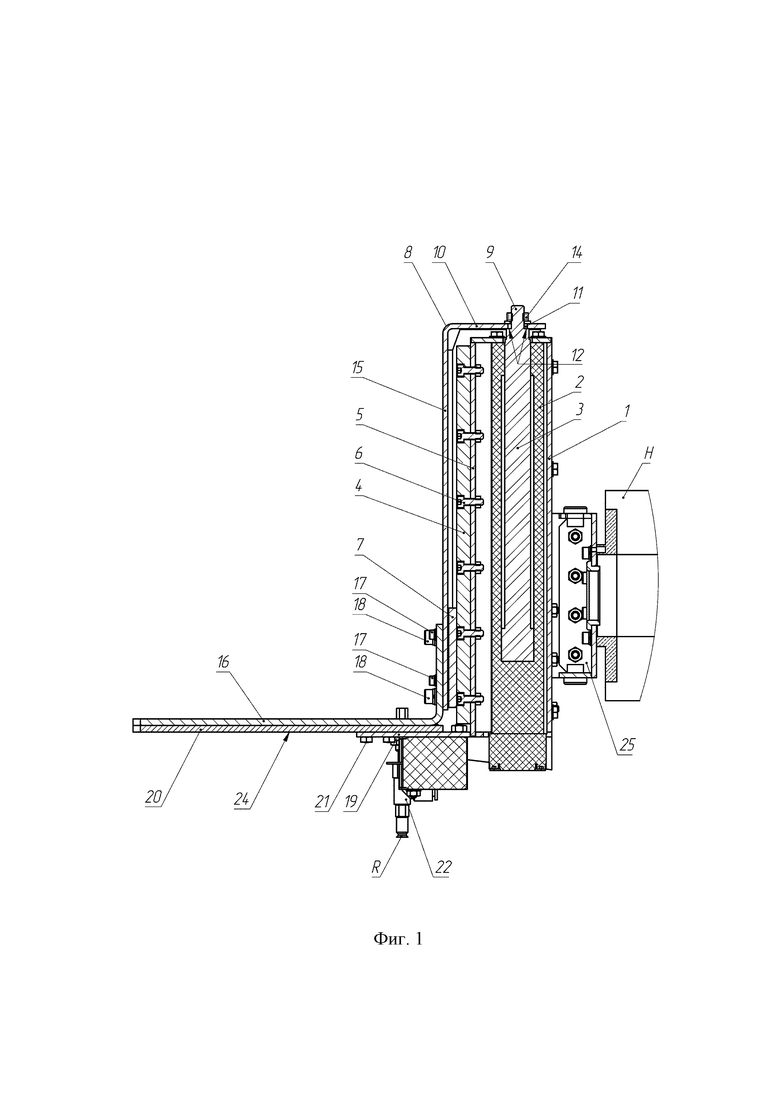
На фиг. 1 представлено изображение захватного устройства, главный вид, разрез.
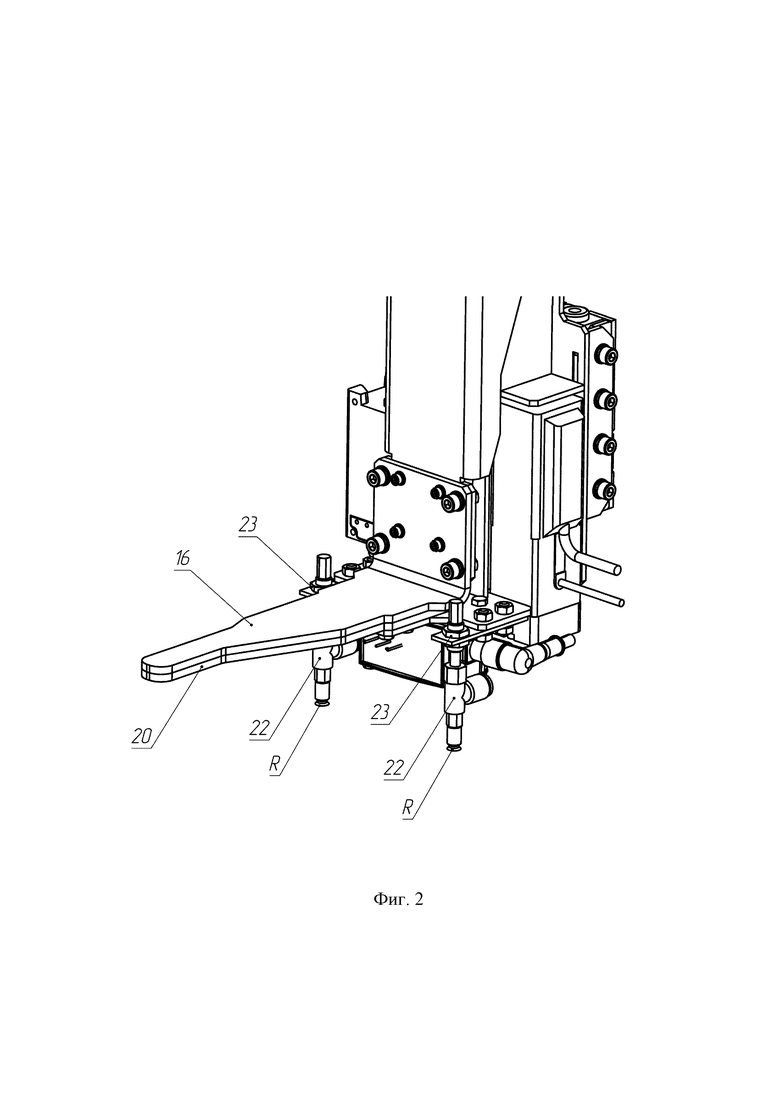
На фиг. 2 представлено изображение примера выполнения захватного устройства с двумя вакуумными присосками, общий вид (фрагмент).
Захватное устройство, предназначенное для захватывания и удерживания листового материала (в частности, банкнот), содержит корпус 1, являющийся несущим конструктивным элементом, с которым соединены функциональные элементы (части) устройства. В корпусе 1 установлен линейный электрический привод - электромеханический штоковый линейный актуатор 2, исполнительным элементом которого является шток 3. Для предлагаемого захватного устройства может быть использован, например, стандартный линейный актуатор "SMC LEY16RC-150WMU-R8CP17". В представленном примере на корпусе 1 закреплен линейный направляющий элемент, выполненный в виде направляющего рельса 4, продольная ось которого выставлена параллельно оси штока 3. Направляющий рельс 4 соединен со стенкой 5 корпуса 1 с помощью крепежных элементов, например, винтов 6. На направляющем рельсе 4 установлена каретка 7, имеющая возможность линейного перемещения вдоль рельса 4. Со штоком 3 соединена консоль 8, в продольном сечении имеющая Г-образную форму. Корпусные, соединительные элементы обычно изготавливают из нержавеющей стали марки AISI 304; направляющие элементы захватных устройств обычно изготавливают из хромированной стали, например Gr15 (российский аналог ШХ15, ГОСТ 4543-71). Концевой участок 9 штока 3 выполнен в виде шейки и соединен с полкой 10 консоли 8. Шейка 9 штока вставлена в отверстие 11 полки 10, при этом ступенька (уступ) 12 под шейкой 9, имеющая наружный диаметр больший диаметра отверстия 11, упирается во внутреннюю поверхность полки 10 консоли 8. С помощью гайки 14 обеспечивается прижим полки 10 к торцевой поверхности ступеньки 12 штока 3, тем самым фиксируя положение консоли 8 относительно штока 3. В представленном на фигуре примере выполнения консоль 8 имеет вертикальную стойку 15, с нижней частью которой соединен один из зажимных рабочих элементов захватного устройства - верхняя губка 16, расположенная с наружной стороны стойки 15 консоли 8. Губка 16 неподвижно закреплена на стойке 15 с помощью крепежных элементов - винтов 17. Со стойкой 15 также неподвижно соединена каретка 7, при этом каретка 7 расположена с внутренней стороны стойки 15. В представленном примере нижняя часть стойки 15 консоли 8 расположена между кареткой 7 и отогнутой установочной частью верхней губки 16. Крепежные элементы - винты 18 - одновременно соединяют друг с другом верхнюю губку 16, стойку 15 консоли 8 и каретку 7 (для повышения надежности соединения). Таким образом обеспечена возможность передачи линейного перемещения (при работе захватного устройства) от штока 3 к верхней губке 16, являющейся подвижным зажимным рабочим элементом захватного устройства.
В представленном примере выполнения нижняя часть стенки 5 корпуса 1 снабжена опорной площадкой 19, расположенной под верхней губкой 16. На площадке 19 неподвижно закреплен другой зажимной рабочий элемент - нижняя губка 20 - с помощью крепежных элементов, например, винтов, 21. Таким образом нижняя губка 20 неподвижно соединена с корпусом 1 и является неподвижным зажимным рабочим элементом захватного устройства.
Зажимные рабочие элементы могут быть выполнены иной формы, однако для взаимодействия со стопками листового материала, в частности, банкнот, оптимальным является выполнение зажимных рабочих элементов в форме губок, так как они обеспечивают наиболее надежное захватывание листов (банкнот) в силу обеспечения большей площади поверхности контакта. Рабочие элементы, в том числе зажимные губки захватных устройств, обычно изготавливают из нержавеющей стали марки AISI 304.
Нижняя губка 20 установлена таким образом, что она смыкается с верхней губкой 16 при нахождении верхней губки 16 в своем нижнем положении, которое соответствует полностью втянутому положению штока 3 линейного актуатора 2.
В представленном примере выполнения захватного устройства с нижней частью корпуса 1 неподвижно соединены две вакуумные присоски 22, установленные по разные боковые стороны от губки 20 и закрепленные с помощью гаек 23. Для предлагаемого захватного устройства могут быть использованы, например, стандартные вакуумные присоски, например "вакуумная присоска SMC ZPR06UNK6-06-A8. Рабочие полости R вакуумных присосок, предназначенные для создания в них разрежения воздуха, расположены со стороны нижней нерабочей, свободной поверхности 24 нижней губки 20. В исходном положении (как показано на фиг.) захватного устройства, закрепленного на руке Н робота-манипулятора, полости R вакуумных присосок 22 обращены в направлении от поверхности 24 губки 20 вниз, то есть к основанию (полу) роботизированной ячейки (на фиг. не показана), в состав которой входит робот-манипулятор с захватным устройством, так как при обработке банкнот наиболее вероятно выпадение банкноты из зажимных рабочих элементов именно на пол (на основание) ячейки.
Корпус 1 со стороны крепления к руке H робота-манипулятора снабжен переходным фланцем 25, выполнение которого позволяет повысить технологичность осуществления сборочных операций при соединении захватного устройства с выходным (последним) звеном руки робота-манипулятора.
Функционирование заявляемого захватного устройства осуществляется при работе робота-манипулятора, входящего в состав роботизированной ячейки (системы, комплекса) для обработки листового материала, в частности, банкнот или ценных бумаг. В состав захватного устройства может входить несколько комплектов рабочих элементов (отличающихся по форме и/или размерам) - для работы с несколькими типами роботизированных систем, компоненты которых могут отличаться геометрической формой и размерами элементов, с которыми осуществляет взаимодействие захватное устройство. Роботизированная система содержит блок управления, задающий режимы функционирования и обеспечивающий взаимодействие отдельных компонентов системы, в том числе робота-манипулятора, включая захватное устройство. При необходимости осуществить требуемое действие с объектом манипулирования (захватывание, удерживание, перемещение, отпускание) рука робота-манипулятора по команде, получаемой от блока управления роботизированной системы, подводит захватное устройство к объекту. По управляющему сигналу осуществляется раскрытие рабочих элементов на заданную величину: команда поступает в контроллер линейного актуатора 2, шток 3 которого выдвигается на заданную величину, перемещая за собой консоль 8, верхнюю губку 16 и каретку 7, установленную на направляющем рельсе 4, соединенном с корпусом 1. Величина раскрытия захвата задается блоком управления в зависимости от габаритов объекта манипулирования (толщины пачки банкнот) и/или его местоположения (определенный отсек контейнера загрузки, контейнер выгрузки, карман ССМ и т.д.). При перемещении штока 3 выполняется перемещение верхней губки 16, связанной через консоль 8 и каретку 7 с направляющим рельсом 4 (такая конструктивная связь верхней губки 16 с направляющим элементом - рельсом 4, исключает возможные отклонения при линейном перемещении губки 16). При достижении заданной величины раскрытия захвата (расстояния между губками 16 и 20) выдвижение штока 3 прекращается. Затем рука робота-манипулятора перемещает захватное устройство в позицию, в которой объект манипулирования оказывается между разведенными рабочими элементами захватного устройства - губками 16 и 20. Затем поступает команда на захватывание объекта (пачки банкнот), при котором линейный актуатор 2 получает управляющий сигнал на обратное перемещение (втягивание) штока 3. Шток 3 начинает втягиваться, при этом движение передается связанной со штоком 3 верхней губке 16, которая начинает перемещаться по направлению к неподвижной нижней губке 20, при этом расстояние между захватными рабочими элементами (губками 16 и 20) сокращается. Губки 16 и 20 сжимают (захватывают) объект до достижения заранее установленного усилия сжатия, задаваемого обратной связью по вольт-амперной характеристике линейного актуатора. При достижении заранее заданного усилия сжатия захватное устройство переводится в режим удерживания объекта, при этом двигатель линейного актуатора останавливается, после чего рука H робота-манипулятора осуществляет перемещение захватного устройства, удерживающего объект манипулирования (стопку банкнот) в заданную целевую точку, например, перемещает стопку банкнот из контейнера загрузки во входной карман ССМ. При достижении целевой точки поступает управляющий сигнал на раскрытие рабочих элементов - губок 16 и 20 (на выдвижение штока 3, при котором происходит перемещение верхней губки 16 в противоположную сторону от нижней губки 20). Перемещение верхней губки 16 осуществляется как было описано выше. При увеличении расстояния между губками 16 и 20 объект освобождается захватным устройством робота-манипулятора и остается в целевой точке для дальнейшей обработки.
Однако, как уже было описано выше, в реальных условиях возможно выпадение банкноты (листа) из удерживаемой и перемещаемой стопки вследствие того, что одна из банкнот может оказаться заломленной (сложенной) и не попасть в зону действия прижима рабочих элементов, кроме того, возможно выпадение банкноты из перемещаемой стопки вследствие ее ветхого состояния, а также в силу иных причин.
Для обнаружения выпавших банкнот может быть использовано техническое зрение, в настоящее время широко применяемое в современных роботизированных системах. Например, видеокамера (на фиг. не показана), передающая сигналы в блок управления для их обработки и анализа, может быть установлена на самом захватном устройстве, в частности, на корпусе 1 со стороны расположения рабочих элементов - зажимных губок 16 и 20.
В случае обнаружения утерянной (выпавшей) банкноты робот-манипулятор получает команду на перемещение захватного устройства к установленной зоне (заданным координатам) в положение, при котором возможен захват банкноты вакуумными присосками 22 или хотя бы одной из них. При создании эжектором разрежения воздуха в рабочей камере R происходит притягивание листа (банкноты) и его удерживание. Затем роботу-манипулятору поступает команда на перемещение захватного устройства с удерживаемой банкнотой к соответствующему контейнеру для сбора выпавших банкнот. Робот-манипулятор с захватным устройством отрабатывает полученную команду, после чего в рабочей камере R создается нормальное давление, и вакуумная присоска перестает удерживать банкноту. Банкнота сбрасывается в контейнер. Затем с помощью технического зрения и при перемещении руки робота-манипулятора продолжается сканирование рабочей зоны с целью обнаружения выпавших банкнот. При обнаружении цикл повторяется. При отсутствии такого сигнала захватное устройство робота-манипулятора готово к выполнению следующей операции.
Таким образом, заявляемое захватное устройство робота-манипулятора имеет возможность (при работе в составе роботизированной ячейки для обработки банкнот) с помощью зажимных рабочих элементов выполнять автоматическое захватывание, удерживание и отпускание стопки листового материала (стопки банкнот) или отдельных листов (банкнот), обеспечивая перемещение объекта из исходной точки в заданную целевую точку, а также с помощью по меньшей мере одного вакуумного держателя выполнять автоматическое захватывание отдельного листа (банкноты), выпавшего из стопки (в частности, на поверхность пола ячейки), его удерживание и перемещение в заданную зону (точку), что по сравнению с прототипом обеспечивает расширение функциональных возможностей устройства. При этом заявляемое захватное устройство является комбинированным вакуумно-механическим захватным устройством робота-манипулятора. Его применение в составе роботизированной счетно-сортировальной ячейки (комплекса, системы, участка) для обработки листового материала (банкнот) позволяет в случае обнаружения выпавших банкнот исключить необходимость остановки работы оборудования и личное выполнение оператором изъятия (подбора) выпавшей банкноты (листа) внутри ячейки. Также следует отметить, что по сравнению с прототипом исключение из конструкции двух пневмоцилиндров упрощает конструктивное выполнение и существенно уменьшает габаритные размеры устройства.
Изобретение относится к области робототехники, в частности к промышленным манипуляционным роботам-манипуляторам. Захватное устройство робота-манипулятора содержит несущий элемент, линейный электрический привод, соединенный с несущим элементом, зажимные рабочие элементы, выполненные с возможностью изменения расстояния между ними. Один из зажимных рабочих элементов соединен с исполнительным элементом линейного электрического привода с возможностью линейного перемещения совместно с упомянутым исполнительным элементом. Другой зажимной рабочий элемент неподвижно соединен с несущим элементом. Захватное устройство дополнительно снабжено по меньшей мере одним вакуумным держателем, установленным таким образом, что его рабочая полость, предназначенная для создания в ней разрежения воздуха, расположена со стороны нерабочей поверхности неподвижно соединенного с несущим элементом нижнего зажимного рабочего элемента и обращена в сторону от упомянутой нерабочей поверхности зажимного рабочего элемента. Техническим результатом изобретения является расширение функциональных возможностей захватного устройства. 8 з.п. ф-лы, 2 ил.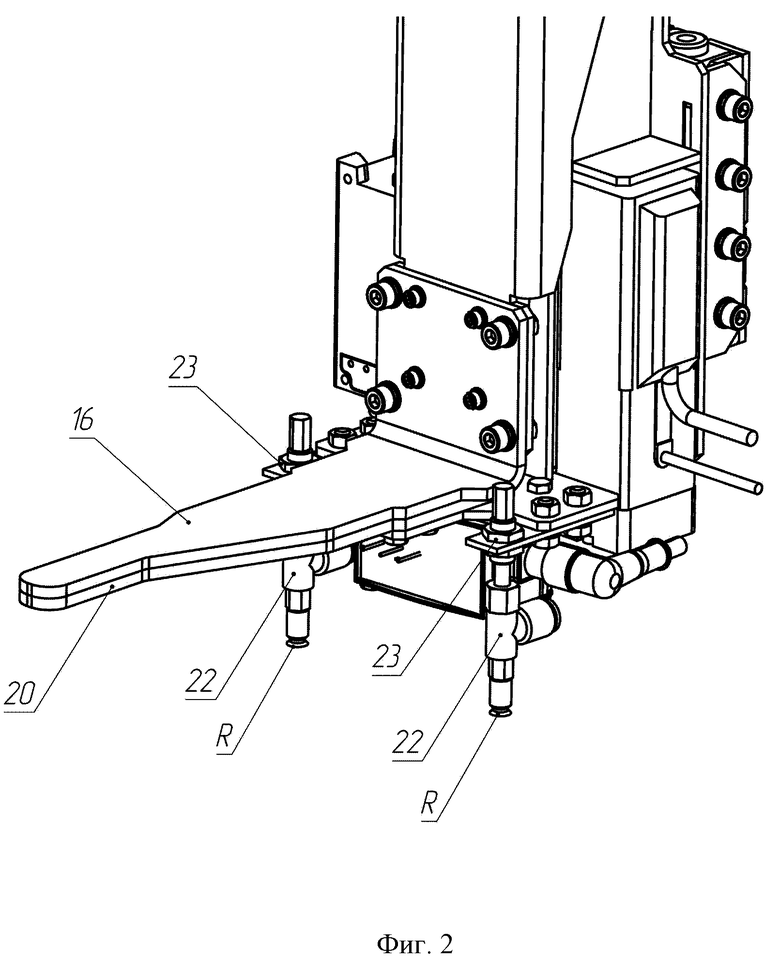
1. Захватное устройство робота-манипулятора, характеризующееся тем, что оно содержит несущий элемент, линейный электрический привод, соединенный с несущим элементом, зажимные рабочие элементы, выполненные с возможностью изменения расстояния между ними, один из зажимных рабочих элементов соединен с исполнительным элементом линейного электрического привода с возможностью линейного перемещения совместно с упомянутым исполнительным элементом, а другой зажимной рабочий элемент неподвижно соединен с несущим элементом, при этом захватное устройство дополнительно снабжено по меньшей мере одним вакуумным держателем, установленным таким образом, что его рабочая полость, предназначенная для создания в ней разрежения воздуха, расположена со стороны нерабочей поверхности неподвижно соединенного с несущим элементом нижнего зажимного рабочего элемента и обращена в сторону от упомянутой нерабочей поверхности зажимного рабочего элемента.
2. Захватное устройство по п. 1, характеризующееся тем, что несущий элемент является корпусом.
3. Захватное устройство по п. 1, характеризующееся тем, что в качестве линейного электрического привода использован электромеханический штоковый линейный актуатор.
4. Захватное устройство по п. 1, характеризующееся тем, что зажимные рабочие элементы выполнены в виде губок.
5. Захватное устройство по п. 1, характеризующееся тем, что зажимные рабочие элементы выполнены сменными.
6. Захватное устройство по п. 1, характеризующееся тем, что в качестве вакуумного держателя использована вакуумная присоска.
7. Захватное устройство по п. 1, характеризующееся тем, что снабжено двумя вакуумными держателями.
8. Захватное устройство по п. 7, характеризующееся тем, что вакуумные держатели расположены по разные боковые стороны нижнего зажимного рабочего элемента, неподвижно соединенного с несущим элементом.
9. Захватное устройство по п. 1, характеризующееся тем, что несущий элемент дополнительно снабжен переходным фланцем, предназначенным для присоединения к руке робота-манипулятора.
| РУЧНАЯ МАШИНКА ДЛЯ НАНЕСЕНИЯ МНОГОЦВЕТНОГО РИСУНКА | 0 |
|
SU184884A1 |
| JP 2016184347 A, 20.10.2016 | |||
| ЛИСТОВОЙ МАТЕРИАЛ, А ТАКЖЕ УСТРОЙСТВА И СПОСОБЫ ИЗГОТОВЛЕНИЯ И ОБРАБОТКИ ТАКОГО ЛИСТОВОГО МАТЕРИАЛА | 2002 |
|
RU2322695C2 |
| Автоматизированный ленточный стартстопный телеграфный аппарат | 1950 |
|
SU100448A1 |
| CN 206108338 U, 19.04.2017 | |||
| УСТРОЙСТВО КИОСКА БАНКОВСКОГО САМООБСЛУЖИВАНИЯ | 2015 |
|
RU2610108C2 |

