ПРЕДПОСЫЛКИ СОЗДАНИЯ
Область изобретения
[0001] Настоящее изобретение относится к удержанию объекта от попадания в окружающую среду и/или к отклонению траектории объекта от окружающей среды, и более конкретно к удержанию птицы и/или летучей мыши от попадания в ветровую электростанцию и/или аэропорт и/или к отклонению траектории птицы и/или летучей мыши от ветровой электростанции и/или аэропорта.
Уровень техники
[0002] Ветровые турбины, которые производят экологически чистый вид энергии, предоставляют существенные преимущества окружающей среде и обществу в целом. Однако есть существенные побочные проблемы, касающиеся безопасности птиц и летучих мышей, которые являются результатом их использования. Во всем мире имеются примеры, когда большое количество птиц и летучих мышей были убиты, и когда редкая защищаемая разновидность была травмирована или смертельно повреждена, что приводило к резкому и определенному протесту. Есть сотни примеров, когда пресса сообщала о существенном повреждении и гибели редких и не слишком редких разновидностей птиц и летучих мышей.
[0003] В намерения ориентированных на получение прибыли компаний, которые работают в этой области, во-первых и прежде всего входит производство энергии по возможно самой низкой стоимости и с наименьшим вмешательством в их действия заинтересованных законодателей и граждан. За эти годы гибель и повреждение птиц и летучих мышей всех разновидностей часто преследовали промышленность и вызывали задержку и большие расходы при подключении новых объектов ветровой энергии. Решения, удовлетворительные для всех заинтересованных, как было доказано, являются труднодостижимыми традиционными методами.
[0004] Обычно используемые решения не снимают эту проблему. Много решений было опробовано, но без долгосрочного успеха, потому что все решения используют единственную методологию, имеющую дело с очень сложным биологическим и укоренившимися рядом особенностей, которые являются уникальными для птиц и летучих мышей.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0005] Настоящее изобретение описано со ссылками на сопровождающие чертежи. На чертежах подобные ссылочные номера указывают идентичные или функционально подобные элементы. Дополнительно самая левая цифра(ы) ссылочного номера идентифицирует чертеж, на котором ссылочный номер появляется впервые.
[0006] ФИГ. 1 иллюстрирует типичную систему предотвращения столкновения животных в соответствии с типичным вариантом настоящего изобретения;
[0007] ФИГ. 2 иллюстрирует первое типичное действие модуля обнаружения, используемого в системе предотвращения столкновения животных согласно типичному варианту настоящего изобретения;
[0008] ФИГ. 3 иллюстрирует второе типичное действие модуля обнаружения, используемого в системе предотвращения столкновения животных согласно типичному варианту настоящего изобретения;
[0009] ФИГ. 4 иллюстрирует действие модуля сдерживания, используемого в системе предотвращения столкновения животных согласно типичному варианту настоящего изобретения;
[0010] ФИГ. 5 и ФИГ. 5.1 иллюстрируют действие генерируемого средствами электроники акустического зондирующего сигнала на птицу согласно типичному варианту настоящего изобретения;
[0011] ФИГ. 6 иллюстрирует типичный генерируемый средствами электроники акустический зондирующий сигнал, имеющий типичный искусственный зондирующий сигнал согласно варианту настоящего изобретения;
[0012] ФИГ. 7 иллюстрирует воздействие типичного искусственного зондирующего сигнала на птицу согласно варианту настоящего изобретения;
[0013] ФИГ. 8 иллюстрирует типичный генерируемый средствами электроники акустический зондирующий сигнал, имеющий типичный искусственный зондирующий сигнал и типичный звук модуляции согласно варианту настоящего изобретения;
[0014] ФИГ. 9 иллюстрирует типичный генерируемый средствами электроники световой сигнал согласно варианту настоящего изобретения;
[0015] ФИГ. 10А иллюстрирует типичный генерируемый средствами электроники звуковой сигнал согласно варианту настоящего изобретения;
[0016] ФИГ. 10В иллюстрирует типичную эффективность генерируемого средствами электроники звукового сигнала при удерживании и/или отклонении летучей мыши, при работе в первом частотном диапазоне согласно варианту настоящего изобретения;
[0017] ФИГ. 11 иллюстрирует типичную установку системы предотвращения столкновения животных в пределах ветровой электростанции согласно типичному варианту настоящего изобретения;
[0018] ФИГ. 12 далее иллюстрирует систему предотвращения столкновения животных, которая может быть установлена в пределах ветровой турбины согласно типичному варианту настоящего изобретения;
[0019] ФИГ. 13 иллюстрирует типичную установку системы предотвращения столкновения животных в пределах аэропорта согласно типичному варианту настоящего изобретения;
[0020] ФИГ. 14 далее иллюстрирует конфигурацию и расположение различных систем предотвращения столкновения животных в непосредственной близости от различных взлетно-посадочных полос аэропорта в пределах аэропорта согласно типичному варианту настоящего изобретения;
[0021] ФИГ. 15 далее иллюстрирует одну систему предотвращения столкновения животных, которая может быть установлена в пределах аэропорта согласно типичному варианту настоящего изобретения;
[0022] ФИГ. 16 иллюстрирует коммуникативно связанную сеть животных систем предотвращения столкновения животных согласно типичному варианту настоящего изобретения; и
[0023] ФИГ. 17 иллюстрирует эффект множественных воздействий типичного генерируемого средствами электроники акустического зондирующего сигнала, имеющего типичный искусственный сигнал зондирования согласно варианту настоящего изобретения.
[0024] Настоящее изобретение теперь будет описано со ссылками на сопровождающие чертежи. На чертежах подобные номера позиций в целом указывают идентичные, функционально подобные и/или структурно подобные элементы. Чертеж, на котором элемент появляется впервые, обозначен крайней левой цифрой(ами) в номере позиции.
ДЕТАЛИЗИРОВАННОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0025] Следующее Детализированное Описание ссылается на сопровождающие чертежи с тем, чтобы пояснять типичные варианты, совместимые с изобретением. Ссылки в Детализированном Описании на "один типичный вариант," "типичный вариант," " типичный вариант примера" и т.д. указывают, что типичный описанный вариант может включать особый признак, структуру или характеристику, но каждый типичный вариант не обязательно включает особый признак, структуру или характеристику. Кроме того, такие фразы не обязательно относятся к одному и тому же типичному варианту. Далее, когда особый признак, структура или характеристика описаны в связи с типичным вариантом, знания специалистов релевантной области(ей) позволяют воздействовать на такую особенность, структуру или характеристику в связи с другими типичными вариантами, охарактеризованы ли они явно или неявно.
[0026] Типичные варианты, охарактеризованные здесь, представлены для целей иллюстрации, а не ограничения. Возможны другие типичные варианты, и изменения могут быть сделаны в типичных вариантах в пределах сущности и объема изобретения. Поэтому Детализированное Описание не предназначено, чтобы ограничивать изобретение. Вернее область действия изобретения определена только в соответствии с последующей формулой изобретения и ее эквивалентами.
[0027] Варианты изобретения могут быть осуществлены техническими средствами, встроенными программами, программным обеспечением или любой их комбинацией. Варианты изобретения могут также быть осуществлены как инструкции, записанные на машиночитаемой среде, которая может быть считана и выполнена одним или более процессорами. Машиночитаемая среда может включать любой механизм для сохранения или передачи информации в форме, удобочитаемой для машины (например, вычислительного устройства). Например, машиночитаемая среда может включать непереносимые машиночитаемые среды, такие как постоянное запоминающее устройство (ROM); оперативную память (RAM); среды запоминающего устройства на магнитных дисках; оптические носители данных; флэш- память и другие. Как другой пример, машиночитаемая среда может включать непереносимую машиночитаемую среду, такую как электрическую, оптическую, акустическую или другие формы распространенных сигналов (например, несущих волн, инфракрасных сигналов, цифровых сигналов и т.д.). Далее встроенные программы, программное обеспечение, программы, инструкции могут быть описаны здесь как выполнение определенных действий. Однако следует понимать, что такие описания приведены просто для удобства и что такие действия фактически следуют из вычислительных устройств, процессоров, контроллеров или других устройств, выполняющих записанные в ПЗУ программы, программное обеспечение, программы, инструкции и т.д.
[0028] Последующее Детализированное Описание типичных вариантов настолько полно выявит общую природу изобретения, что применяя специальные знания в области другие смогут легко модифицировать и/или приспособить для различных применений такие типичные варианты без чрезмерного экспериментирования, не отступая от сущности и объема изобретения. Следовательно, такая адаптация и изменения предназначены, чтобы находиться в пределах смысла и множества эквивалентов типичных вариантов, основанных на знаниях и руководстве, представленных здесь. Следует понимать, что фразеология или терминология, используемая здесь, использована в целях описания, а не ограничения, так что терминология или фразеология настоящего описания должны интерпретироваться специалистами в релевантной области(ях) в свете раскрытых здесь сведений.
[0029] Для целей этого обсуждения термин "модуль" должен пониматься как включающий по крайней мере одно из программного обеспечения, записанных в ПЗУ программ и аппаратных технических средств (таких как одна или более цепей, микрочипов или устройств, или любой их комбинации) и любую их комбинацию. Кроме того,, будет понятно, что каждый модуль может включать один или более одного компонента в пределах реального устройства, и каждый компонент, который является частью описанного модуля, может функционировать или совместно или независимо от любого другого компонента, являющегося частью модуля. Наоборот многочисленные модули, описанные здесь, могут представлять единственный компонент в пределах реального устройства. Далее компоненты в пределах модуля могут находиться в единственном устройстве или могут быть распределены среди множества устройств связанным по проводам или беспроводным образом.
КРАТКИЙ ОБЗОР
[0030] В целом настоящее изобретение основано на изучении характера поведения многих разновидностей животных, таких как птицы и летучие мыши, для примера, а также их анатомического строения. Это изучение обеспечило понимание присущих реакций этих животных, которые могут быть изменены биологическим пониманием физиологии, использованием тепловых датчиков, технологии звука и ультразвука, лазерной технологии и интеллектуального распознания животных. Уникальная координация между этими специализированными технологиями обеспечивает для животных предотвращение несчастных случаев не наносящим вреда окружающей среде образом, при этом достигается беспрецедентный успех в отклонении или удерживании животных от их встречного курса с объектами, такими как воздушные турбины или самолет, для примера. Кроме того, настоящее изобретение по существу не воздействует на здоровье животных и не представляет по существу вредного побочного воздействия на животных, окружающую их среду и любую окружающую популяцию людей.
ТИПИЧНАЯ СИСТЕМА ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ ЖИВОТНЫХ
[0031] ФИГ. 1 иллюстрирует типичную систему предотвращения столкновения животных в соответствии с типичным вариантом настоящего изобретения. Вообще система предотвращения 102 столкновения животных обнаруживает присутствие объекта 104 в пределах окружающего пространства 100. Объект 104 может включать одно или более животных, один или более других объектов кроме животных или любую их комбинацию. Окружающее пространство 100 может представлять собой воздушную турбину, ветряную электростанцию, взлетно-посадочную полосу аэропорта или материальное пространство рядом со взлетно-посадочной полосой аэропорта, местонахождение нефтеносного песка, нефтяную платформу, судно, сельхозугодия, местонахождение открытой горной разработки, военную базу, область индустриальной опасности, оборудование для хранения продуктов, химическое оборудование, место игры в гольф, больницу, здание, место стоянки автомобилей и/или любую другую соответствующую окружающую среду, которая будет очевидна специалисту в релевантной области(ях), не отступая от сущности и объема настоящего изобретения. После обнаружения объекта в пределах окружающей среды 100, система предотвращения 102 столкновения животных оценивает объект 104. После этого система предотвращения 102 столкновения животных обеспечивает один или более генерируемые средствами электроники сдерживающие сигналы, чтобы удержать объект 104 от входа в окружающую среду 100 и/или отклонить траекторию объекта 104 от окружающей среды 100. Система предотвращения 102 столкновения животных включает модуль обнаружения 106 и модуль сдерживания 108.
[0032] Модуль обнаружения 106 обнаруживает присутствие объекта 104 в пределах части окружающей среды 100. Модуль обнаружения 106 может включать один или более датчиков для обнаружения энергии, такой как температура тела, отражение света, отражение инфракрасного света и/или электромагнитное излучение, например, в пределах электромагнитного спектра в области их видимости, который излучается от объекта 104, и/или помех в электромагнитном спектре в пределах областей их видимости, которые вызваны объектом 104. Модуль обнаружения 106 может обозревать области видимости одного или более датчиков в пределах окружающей среды 100. Этот обзор может включать двумерный обзор по горизонтальному и вертикальному направлениям в пределах окружающей среды 100, такой обзор по осям "x" и "y" в Декартовой системе координат, например, или может включать трехмерный обзор, такой как обзор по осям "x", "y", и "z" Декартовой системы координат, например. В типичном варианте двумерный обзор может использоваться, чтобы обнаружить присутствия объекта 104 в пределах части окружающей среды 100, тогда как трехмерный обзор может использоваться, чтобы сфокусироваться на объекте 104 в пределах части окружающей среды 100. Как показано на ФИГ. 1, области видимости одного или более датчиков обозначены окном 150 слежения.
[0033] Один или более датчиков могут включать микроболометры, термографические камеры, терагерцевые камеры, инфракрасные камеры, тепловые датчики, акустические датчики, инфракрасные датчики, световые камеры, инфракрасные камеры, микроболометры, видеопроцессоры, магнитные датчики, магнитометры, инфракрасный лазерный радар, ультразвуковые датчики, микроволновые радарные датчики, детекторы индуктивной петли, трибоэлектрические датчики, сейсмические датчики, инерционные датчики, звуковые микрофоны или любую их комбинацию. Хотя окно 150 слежения показано на ФИГ. 1 как четырехугольник, это - только для иллюстративных целей. Специалистам в релевантной области(ях) техники будет понятно, что конфигурация окна 150 слежения, так же как других окон слежения, которые будут обсуждаться ниже, зависит от выполнения одного или более датчиков и может изменяться для различных типов датчиков, не отступая от сущности и объема настоящего изобретения.
ТИПИЧНОЕ ДЕЙСТВИЕ СКАНИРОВАНИЯ СИСТЕМЫ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ ЖИВОТНЫХ
[0034] ФИГ. 2 иллюстрирует первое типичное действие модуля обнаружения, используемого в системе предотвращения столкновения животных согласно типичному варианту настоящего изобретения. Система предотвращения столкновения животных 200 может включать модуль обнаружения, для предоставления примера, имеющий один или более датчиков 202, которые обозревают окружающую среду 204, чтобы сканировать присутствие объекта в пределах областей их видимости. Система предотвращения 200 столкновения животных может представлять собой типичный вариант системы предотвращения 102 столкновения животных.
[0035] Модуль обнаружения может скомпоновать один или более датчиков 202, чтобы сканировать часть окружающей среды 204, называемую окном 206 слежения, в пределах их областей видимости для обнаружения присутствия объекта. Один или более датчиков 202 могут быть скомпонованы с возможностью обозревать окно 206 слежения для обнаружения присутствия объекта в первом местоположении слежения 206.1, затем перекомпанованы, чтобы сканировать окно 206 слежения для обнаружения присутствия объекта во втором местоположении 206.2, когда объект не обнаружен в пределах первого местоположения слежения 206.1. Модуль обнаружения может продолжить обозревать окно 202 слежения в других местоположениях слежения в пределах окружающей среды 204 до обнаружения присутствия объекта.
[0036] Обратимся снова к ФИГ. 1. После обнаружения объекта 104 в пределах окружающей среды 100, модуль обнаружения 106 начинает следовать или отслеживать объект 104 в пределах окна 150 слежения, чтобы обеспечить его распознание. После этого модуль обнаружения 106 определяет, соответствует ли объект 104 в пределах окна 150 слежения одному или более животным, одному или более другим объектам кроме животных или любой их комбинации. Модуль обнаружения 106 определяет один или более параметров движения объекта 104 и/или одну или более характеристик объекта 104. Модуль обнаружения 106 определяет параметры движения, прикрепляя систему отсчета ориентира к объекту 104 и измеряя ее изменение в положении относительно другой системы отсчета ориентира. Параметры движения могут использоваться, чтобы описать изменение положения объекта 104 в пределах окна 150 слежения во времени. Это изменение в положении может быть описано в терминах скорости, ускорения, смещения, времени, веса и/или массы. Характеристики объекта 104 в пределах окна 150 слежения могут относиться к физическому внешнему виду и/или физической характеристике объекта 104. Характеристики могут описывать абсолютные характеристики объекта 104, такие как механика корпуса и/или передвижение объекта 104. Механика корпуса может включать длину, ширину, высоту, вес, температуру и/или характер отражающей поверхности, например. Передвижение может включать бег, плавание, прыжки, полет или ходьбу, например. Альтернативно или дополнительно, характеристики могут описывать относительные характеристики объекта 104, такие как относительное расстояние от системы отсчета ориентира до объекта 104, для примера.
[0037] Модуль обнаружения 106 сравнивает параметры движения и/или характеристики объекта 104 с параметрами движения и/или характеристиками множества известных объектов, таких как известные животные или известные другие объекты кроме животных, например, чтобы определить, являются ли параметры движения и/или характеристики объекта 104 по существу подобными любому из параметров движения и/или характеристик любого из множества известных объектов. Модуль обнаружения 106 распознает объект 104 в пределах окна 150 слежения, как являющийся одним из множества известных объектов, параметры движения и/или характеристики которых по существу подобны параметрам движения и/или характеристикам объекта 104. Параметры движения и или характеристики объекта 104 могут быть по существу подобными параметрам движения и/или характеристикам одного из множества известных объектов, когда они идентичны, а именно, сопоставимы, или когда они отличаются достаточно малой девиацией. В типичном варианте параметры движения и/или характеристики могут использоваться для распознания объекта 104 как являющегося животным. В этом типичном варианте параметры движения и/или характеристики могут использоваться для распознавания животного в терминах его биологического класса, такого как Aves или Mammalia, чтобы обеспечить некоторые примеры, и/или в терминах его биологического отряда, такого как Гусеобразные, Galliformes, Ржанкообразные, Gaviiformes, Podicipediformes, Procellariiformes, Sphenisciformes, Pelecaniformes, Phaethontiformes, Аистообразные, Cathartiformes, Phoenicopteriformes, Сорокопутообразные, Gruiformes, Pteroclidiformes, Columbiformes, Попугаеобразные, Кукушкообразные, Opisthocomiformes, Strigiformes, Caprimulgiformes, Apodiformes, Ракшеобразные, Броненосцеобразные, Трогонообразные, Coliiformes, Воробьиноподобные или Рукокрылые, для предоставления некоторых примеров. Однако специалистам в релевантной области(ях) понятно, что параметры движения и/или характеристики могут использоваться, чтобы распознать животное в терминах других таксономических рангов, таких как жизнь, территория, область, тип, семья, род и/или разновидности, не отступая от сущности и объема настоящего изобретения.
В другом типичном варианте многочисленные известные объекты, параметры движения которых и/или характеристики которых сравниваются, могут быть уменьшены или сужены перед сравнением. В этом другом типичном варианте модуль обнаружения 106 может сузить многочисленные известные объекты для сравнения на основании условий окружающей среды, таких как географическое положение, время дня, время года или любое другое соответствующее условие окружающей среды, которое может иметь место в пределах окружающей среды 100. Например, модуль обнаружения 106 может получить доступ к первой базе данных, которая включает информацию о множестве известных объектов, которые могут быть обнаружены в пределах окружающей среды 100, и второй базе данных, которая включает информацию о параметрах движения и/или характеристиках множества известных объектов в пределах первой базы данных. В этом примере модуль обнаружения 106 сравнивает объект 104 с первой базой данных, чтобы определить множество известных объектов, которые могут быть обнаружены в пределах окружающей среды 100, и сравнивает параметры движения и/или характеристики объекта 104 с параметрами движения и/или характеристиками этого множества известных объектов во второй базе данных. Модуль обнаружения 106 распознает объект 104 в пределах окна 150 слежения, как являющийся одним из множества известных объектов из второй базы данных, параметры движения которого и/или характеристики по существу подобны параметрам движения и/или характеристикам объекта 104. Дополнительно первая база данных может быть обновлена, чтобы включать неизвестные объекты, которые могут быть обнаружены в пределах окружающей среды 100, и вторая база данных может быть обновлена, чтобы включать параметры движения и/или характеристики этих неизвестных объектов в пределах окружающей среды 100.
ТИПИЧНОЕ ДЕЙСТВИЕ РАСПОЗНАВАНИЯ СИСТЕМЫ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ ЖИВОТНЫХ
[0039] ФИГ. 3 иллюстрирует второе типичное действие модуля обнаружения, используемого в системе предотвращения столкновения животных согласно типичному варианту настоящего изобретения. Модуль обнаружения обозревает окружающую среду, чтобы обнаружить присутствие объекта в пределах области его видимости. После обнаружения объекта модуль обнаружения сравнивает параметры движения и/или характеристики объекта с различными параметрами движения и/или характеристиками животных в попытке распознать объект. Модуль обнаружения может представлять собой типичный вариант модуля обнаружения 106.
[0040] В частности, модуль обнаружения обозревает окружающую среду, чтобы осуществить поиск объекта в пределах области его видимости для детектирования присутствия объектов 302.1-302.3. Как показано на ФИГ. 3, область видимости модуля обнаружения обозначена окном 300 слежения. После обнаружения объектов 302.1-302.3 в пределах окружающей среды модуль обнаружения определяет параметры движения, такие как скорость и/или ускорение, например, объектов 302.1-302.3 и/или характеристики, такие как длина, ширина, высота, вес и/или температура объектов 302.1-302.3. После этого модуль обнаружения сравнивает параметры движения и/или характеристики объектов 302.1-302.3 с параметрами движения и/или характеристиками животных, чтобы определить, являются ли параметры движения и/или характеристики объектов 302.1-302.3 по существу подобными любому из параметров движения и/или характеристик животных. Как показано на ФИГ. 3, модуль обнаружения может решить, что объекты 302.1-302.3 соответствуют aquila chrysaetos или беркуту на основании подобия между параметрами движения и/или характеристиками объектов 302.1-302.3 и параметрами движения и/или характеристиками aquila chrysaetos.
[0041] Обратимся снова к ФИГ. 1. Модуль обнаружения 106 может произвольно записать изображение объекта 104, когда он отслеживается или сопровождается в пределах окна 150 слежения. Альтернативно или дополнительно модуль обнаружения 106 может записать серию изображений объекта 104, чтобы сформировать видео объекта 104, когда он отслеживается или сопровождается в пределах окна 150 слежения. Альтернативно или дополнительно модуль обнаружения 106 может сделать аудио запись, когда объект 104 отслеживается или сопровождается в пределах окна 150 слежения. Модуль обнаружения 106 может обеспечить изображением, видео и/или аудио и произвольно параметрами движения и/или характеристиками объекта 104 дистанционный Экологический Центр Данных для анализа.
[0042] Дополнительно модуль обнаружения 106 может сообщить команду и/или управляющий сигнал 152 для управления общей конфигурацией и/или действием модуля сдерживания 108. Команда и/или управляющий сигнал 152 могут включать информацию слежения, которая указывает положение объекта 104 в пределах окружающей среды и/или в пределах окна 150 слежения, и/или параметры движения и/или характеристики объекта 104, а также указание объекта 104, такое как является ли объект 104 животным, и произвольно, таксономический ранг, такой жизнь, территория, область, тип, семья, род и/или разновидности животного и сообщать таксономический ранг как часть информации слежения за животным, или объект 104 не является животным. Информация слежения может непрерывно или почти непрерывно обновляться модулем обнаружения 106, когда объект 104 отслеживается, или сопровождается, или после распознания объекта 104 как являющегося животным, и произвольно, таксономическим рангом и/или как являющимся другим объектом кроме животного.
[0043] Модуль сдерживания 108 обеспечивает один или более генерируемых средствами электроники сдерживающих сигналов 154, чтобы удержать объект 104 от вступления в окружающую среду 100 и/или отклонить траекторию объекта 104 от окружающей среды 100. Модуль сдерживания 108 может формировать генерируемые средствами электроники сдерживающие сигналы 154, чтобы отслеживать или следовать за объектом 104 в ответ на информацию слежения. Например, модуль сдерживания 108 может получать положение объекта 104 и параметры движения, такие как скорость и ускорение, объекта 104 как часть информации слежения. В этом примере модуль сдерживания 108 может компенсировать движение объекта 104 из его положения в пределах окружающей среды и/или в пределах окна 150 слежения, направляя один или более генерированные средствами электроники сдерживающие сигналы 154 к объекту 104. Генерируемый средствами электроники сдерживающий сигнал 154 может включать генерируемые средствами электроники сигналы или волны, характеристики которых изменяются она основании того, является ли объект 104 животным, и произвольно, таксономического ранга животного, и/или того, что объект не является 104 животным. Эти генерированные средствами электроники сигналы или волны удерживают и/или отклоняют объект 104 от окружающей среды 100. Генерируемые средствами электроники сигналы или волны могут включать один или более генерированных средствами электроники акустических зондирующих сигналов для возбуждения акустического устрашающего рефлекса (ASR) у объекта 104 и/или один или более световых и/или звуковых зондирующих сигналов для по существу ограждения зоны в пределах окружающей среды 100, который отпугивает и/или отклоняет объект 104 от зоны 100.
[0044] В типичном варианте модуль сдерживания 108 сконфигурирован, чтобы по существу минимизировать шум, созданный одним или более генерированными средствами электроники сдерживающими сигналами 154 вне окружающей среды 100. Различные регламенты Агентства по охране окружающей среды (ЕРА) и/или другие локальные регламенты регулируют величину шума, который допускается в пределах данной области. Например, одни или более генерируемый средствами электроники сдерживающий сигнал 154 не может превышать допустимые уровни помех вне окружающей среды 100, которая обычно составляет по крайней мере приблизительно 1500 футов для ветровой электростанции.
ТИПИЧНОЕ ДЕЙСТВИЕ ОТПУГИВАНИЯ И/ИЛИ ОТКЛОНЕНИЯ СИСТЕМЫ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ ЖИВОТНОГО
[0045] ФИГ. 4 иллюстрирует действие модуля сдерживания, используемого в системе предотвращения столкновения животных согласно типичному варианту настоящего изобретения. Система предотвращения 400 столкновения животных обеспечивает один или более генерируемых средствами электроники сдерживающих сигналов для удержания объекта 404 от вступления в окружающую среду 402 и/или отклонения траектории объекта 404 от окружающей среды 402. Система предотвращения 400 столкновения животных может представлять собой типичный вариант системы предотвращения 102 столкновения животных.
[0046] В частности, модуль обнаружения в пределах системы предотвращения 400 столкновения животных обозревает окружающую среду 402, чтобы сканировать присутствие объекта, или может прямо сканировать присутствие объекта 404 без обозревания в пределах части окружающей среды в пределах его области видимости. Как показано на ФИГ. 4, область видимости модуля обнаружения обозначена окном 406 слежения. После обнаружения объекта 404 в пределах окна 406 слежения и признания объекта 404 как являющегося животным на основании параметров движения и/или характеристик объекта 404, модуль обнаружения сообщает информацию слежения, которая соответствует положению животного в пределах окружающей среды, такую как "x", "y" и "z" координаты Декартовой системы координат, например, и/или в пределах окна 406 слежения. Модуль обнаружения может также распознавать таксономический ранг, такой жизнь, территория, область, тип, семья, род и/или разновидность животного и сообщать таксономический ранг как часть информации слежения. Модуль обнаружения может далее сообщать параметры движения и/или характеристики животного как часть информации слежения.
[0047] Модуль сдерживания в пределах системы предотвращения столкновения животных 400 конфигурирован для обеспечения одного или более генерированных средствами электроники сдерживающих сигналов 410, чтобы удержать и/или отклонить животное. Один или более генерированных средствами электроники сдерживающих сигналов 410 представляют собой средства устрашения, которые определенно приспособлены к таксономическому рангу животного. Например, как показано на ФИГ. 4, генерируемый средствами электроники сдерживающий сигнал 410 может представлять генерируемые средствами электроники сигналы или волны, которые могут включать генерируемые средствами электроники акустические сигналы, которые определенно приспособлены, чтобы удержать и/или отклонить животное таксономической семьи laridae, такое как чайку, например. Модуль сдерживания может формировать и/или направлять генерируемый средствами электроники сдерживающий сигнал 410 к животному в соответствии с информацией слежения. Дополнительно модуль сдерживания может компенсировать движение животного из его положения в пределах окружающей среды и/или в пределах окна 406 слежения, направляя генерируемый средствами электроники сдерживающий сигнал 410 к животному. Модуль обнаружения может обновлять информацию слежения, чтобы позволить модулю сдерживания следить или следовать за животным, когда оно приближается и/или пересекает окружающую среду 402.
ТИПИЧНЫЕ ГЕНЕРИРУЕМЫЕ СРЕДСТВАМИ ЭЛЕКТРОНИКИ СДЕРЖИВАЮЩИЕ СИГНАЛЫ, КОТОРЫЕ МОГУТ БЫТЬ РЕАЛИЗОВАНЫ В ПРЕДЕЛАХ СИСТЕМЫ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ ЖИВОТНЫХ
[0048] Различные типичные генерируемые средствами электроники сдерживающие сигналы, которые могут использоваться в пределах системы предотвращения столкновения животных, будут обсуждаться как удерживание птиц и/или летучих мышей от вступления в окружающую среду и/или отклонение траектории птиц и/или летучих мышей от окружающей среды. Однако эти типичные генерируемые средствами электроники сдерживающие сигналы не ограничены удерживанием и/или отклонением птиц и/или летучих мышей; специалисты релевантной области(ей) техники осознают, что эти типичные средства отпугивания могут быть изменены, чтобы удержать и/или отклонить других животных, не отступая от сущности и объема настоящего изобретения.
АКУСТИЧЕСКИЙ УСТРАШАЮЩИЙ РЕФЛЕКС (ASR) ДЛЯ УДЕРЖАНИЯ И/ИЛИ ОТКЛОНЕНИЯ ПТИЦ
[0049] Генерируемые средствами электроники сдерживающие сигналы могут включать генерируемый средствами электроники акустический зондирующий сигнал для того, чтобы вызвать акустический устрашающий рефлекс (ASR) у животного. ASR настоящего изобретения поддерживает сдерживание животного и отклонение на длительные промежутки времени, по существу избегая привыкания и по существу одновременно избегая беспокойства, путем использования генерируемого средствами электроники акустического зондирующего сигнала. Генерируемый средствами электроники акустический зондирующий сигнал может инициировать ASR у животного за счет обеспечения одной или более частотных передач через кохлеарный нерв животного.
[0050] Генерируемый средствами электроники акустический зондирующий сигнал в пределах частотного диапазона слуха животного с быстрыми частотными вариациями и крутыми увеличениями силы звука может вызвать инициирование ASR у животного. В типичном варианте для птицы генерируемый средствами электроники акустический зондирующий сигнал - это сигнал между приблизительно 300 Гц и приблизительно 6500 Гц и увеличением от приблизительно окружающего уровня помех до уровней выше приблизительно 112 децибел в течение времени менее, чем приблизительно 30 мс нарастания, измеренный приблизительно в 3.3 футах от уха птицы. Как правило, генерируемый средствами электроники акустический зондирующий сигнал создает передачу сигнала по существу в кохлеарном нерве и прямо активизирует моторный центр в ретикулярной формации мозга животного.
[0051] ФИГ. 5 и ФИГ. 5.1 иллюстрируют действие генерируемого средствами электроники зондирующего сигнала на птицу согласно типичному варианту настоящего изобретения. Упрощенное биологическое строение таксономического класса Aves, типа чайки 500. Упрощенное биологическое строение чайки 500 включает мозг 502, имеющий головной мозг, мозжечок, таламус и задний мозг, который связан со спинным мозгом 504. Упрощенное биологическое строение чайки 500 также включает ушко 506, имеющее полукруглые каналы, стремечко, часть гарниссажа, мешочек, перепончатый мешочек ушного лабиринта, овальное окно, улитку уха, барабанную полость и внешний канал ушка, которые связаны с мозгом 502 через кохлеарный нерв. Генерируемый средствами электроники акустический зондирующий сигнал 508 формируется, чтобы предупредить мозг 502, проходя через слуховую траекторию, а именно, от внешнего канала ушка, через барабанную полость, стремечко, овальное окно, улитку уха, utricle, saccule, полукруглые каналы к кохлеарному нерву, ушка 506 до ядра латерального лемниска, расположенного в заднем мозгу мозга 502. Средствами электроники Генерируемый средствами электроники акустический зондирующий сигнал 508 затем активизирует моторный центр в ретикулярной формации мозга 502. Это приводит к по существу немедленной реакции, называемой как ASR, в чайке 500 без воздействия или по существу без воздействия на ее здоровье и без подъема или по существу без подъема, вызванного высвобождением гормонов стресса.
ТИПИЧНЫЙ ГЕНЕРИРУЕМЫЙ СРЕДСТВАМИ ЭЛЕКТРОНИКИ АКУСТИЧЕСКИЙ ЗОНДИРУЮЩИЙ СИГНАЛ, ИМЕЮЩИЙ ТИПИЧНЫЙ ИСКУССТВЕННЫЙ ЗОНДИРУЮЩИЙ СИГНАЛ ДЛЯ ИНИЦИИРОВАНИЯ ASR У ПТИЦ
[0052] ФИГ. 6 иллюстрирует типичный генерируемый средствами электроники слуховой акустический зондирующий сигнал, имеющий типичный искусственный зондирующий сигнал согласно варианту настоящего изобретения. Генерируемый средствами электроники акустический зондирующий сигнал вызывает 600 ASR у птицы для того, чтобы удерживать птицу от окружающей среды или отклонять траекторию птицы от окружающей среды. Генерируемый средствами электроники акустический зондирующий сигнал 600 поддерживает сдерживание и/или отклонение птицы на длительные промежутки времени, избегая привыкания. Генерируемый средствами электроники акустический зондирующий сигнал 600 может инициировать ASR у птицы, создавая по существу сигнальную передачу в ее кохлеарном нерве и прямо активизируя моторный центр в ретикулярной формации мозга птицы, как изображено на ФИГ. 5. и ФИГ. 5.1. Генерируемый средствами электроники акустический зондирующий сигнал 600 может представлять собой типичный вариант генерируемых средствами электроники сдерживающих сигналов 154, генерируемых средствами электроники сдерживающих сигналов 410 и/или генерируемый средствами электроники акустический зондирующий сигнал 508.
[0053] Генерируемый средствами электроники акустический зондирующий сигнал 600 может включать искусственный зондирующий сигнал. Искусственный сигнал зондирования имеет более сильный эффект на птицу, когда время нарастания от первого уровня мощности до второго уровня мощности является наикратчайшим. Искусственный сигнал зондирования изменяется между первым уровнем мощности и вторым уровнем мощности. Искусственный сигнал зондирования должен возрасти от первого уровня мощности до второго уровня мощности до истечения максимального времени нарастания ASR 604. Если искусственный сигнал зондирования должен возрасти от первой величины мощности до второй величины мощности после истечения максимального времени нарастания ASR 604, он, возможно, не вызовет ASR у птицы. Когда искусственный сигнал зондирования достигает второй величины мощности до истечения максимального времени нарастания ASR 604, траектория сигнала для искусственного сигнала зондирования по существу задерживается в пределах стволовой части мозга птицы, лишая возможности или почти лишая возможности птицу делать всестороннюю оценку звука в слуховой зоне коры головного мозга. Без такой оценки птица не в состоянии определить, каким сигналом является искусственный сигнал зондирования, но вместо этого птица инициирует рефлекторную реакцию, такую как мигание глаз и/или мгновенное резкое движение мускул, например. Благодаря отсутствию способностей анализа во время ASR птица не в состоянии по существу привыкнуть к искусственному сигналу зондирования; она становится более чувствительной с каждой экспозицией. Кроме того,, поскольку в течение ASR обработка искусственного сигнала зондирования происходит в пределах заднего мозга, искусственный сигнал зондирования не активирует гипоталамус птицы, не вызывая выделение кортикостерона у птицы в его системе, таким образом по существу не поднимая уровень стресса птицы. Искусственный сигнал зондирования побуждает ASR у птицы, чтобы заставить птицу удерживаться и/или отклоняться от ее траектории, обычно в по существу противоположном направлении от искусственного сигнала зондирования без по существу какого-либо увеличения уровня стресса или по существу без какого-либо отрицательного воздействия на ее здоровье и состояние. Птица по существу не приучается к искусственному сигналу зондирования или даже множественным экспозициям искусственного сигнала зондирования.
[0054] ФИГ. 17 иллюстрирует эффект множественных экспозиций типичного генерируемого средствами электроники акустического зондирующего сигнала, имеющего типичный искусственный сигнал зондирования согласно варианту настоящего изобретения. Как показано на ФИГ. 17, вторая величина мощности искусственного сигнала зондирования для индицирования ASR у птиц снижается в среднем, поскольку птицы неоднократно подвергаются воздействию искусственного сигнала зондирования за многие дни. Например, вторая величина мощности искусственного сигнала зондирования должна быть по крайней мере 118 децибелов, чтобы вызвать ASR у птиц в день 1, которая снижается по крайней мере до 100 децибел в день 5, чтобы вызвать ASR у птиц. Это снижение второй величины мощности указывает, что птицы становятся более чувствительными к искусственному сигналу зондирования при повторении, что противоположно привыканию.
[0055] Обратимся снова к ФИГ. 6. Напротив когда искусственный сигнал зондирования достигает второй величины мощности после максимального времени нарастания ASR 604, сигнальная траектория искусственного сигнала зондирования изменяется, и искусственный сигнал зондирования обрабатывается слуховой частью коры головного мозга птицы, не вызывая рефлекторную реакцию в птице. Это отсутствие рефлекторной реакции не вызывает ASR у птицы, позволяя, чтобы птица анализировала искусственный зондирующий сигнал и в конечном счете привыкала к искусственному сигналу зондирования. Как правило, когда время нарастания искусственного сигнала зондирования достигает второго уровня мощности после максимального времени нарастания ASR 604, искусственный сигнал зондирования обрабатывается не только в заднем мозгу, но и в слуховой коре головного мозга. Эта обработка позволяет птице проанализировать искусственный сигнал зондирования, оценить искусственный сигнал зондирования, и если искусственный сигнал зондирования не представляет реальную опасность для птицы подтвердить, что искусственный сигнал зондирования не является реальной опасностью, таким образом позволяя птице игнорировать повторенное использование искусственного звука. Это игнорирование птицей в конечном счете приводит к привыканию птицы к повторному использованию искусственного сигнала зондирования, который не вызывает ASR.
[0056] В типичном варианте искусственный сигнал зондирования сформирован так, что второй уровень мощности достигает действующего времени нарастания ASR 602, который находится перед максимальным временем нарастания ASR 604, чтобы вызвать ASR у птицы. Например, искусственный сигнал зондирования может характеризоваться как являющийся очень быстро ускоряющимся генерируемым средствами электроники звуком, который повышается от первого уровня мощности до второго уровня мощности приблизительно 112 децибел или выше на расстоянии приблизительно 3.3 фута от барабанной полости птицы приблизительно за 5 мс. В этом примере, если искусственный сигнал зондирования состоял в том, чтобы достигнуть второго уровня мощности 112 децибел за меньше чем приблизительно 10 мс, сигнальная траектория для искусственного сигнала зондирования по существу задерживается в пределах стволовой части мозга птицы, вызывая ASR у птицы. В этом примере, если искусственный сигнал зондирования состоял в том, чтобы достигнуть второго уровня мощности 112 децибелов за больший, чем приблизительно 30 мс промежуток, искусственный сигнал зондирования обрабатывается слуховой зоной коры головного мозга птицы, вызывая рефлекторную реакцию в птице, таким образом не вызывая ASR.
[0057] Дополнительно искусственный сигнал зондирования может включать множественные частоты, типа белого шума, для примера, и/или единственную частоту. В другом типичном варианте искусственный сигнал зондирования должен быть меньше чем приблизительно 6500 Гц, и чтобы стать наиболее эффективным, он должен быть ниже, чем приблизительно 1500 Гц. Как правило после достижения второго уровня мощности искусственный зондирующий сигнал остается на втором уровне мощности в течение предопределенного времени. Например, искусственный зондирующий сигнал остается на втором уровне мощности в течение продолжительности приблизительно 80 мс; однако, другие продолжительности возможны, которые будут очевидны специалистам в релевантной области(ях), не отступая от сущности и объема настоящего изобретения.
[0058] Далее характеристики искусственного сигнала зондирования могут изменяться на основании таксономического ранга птицы. Различные типичные искусственные сигналы зондирования для различных разновидности птиц показаны в таблице ниже.
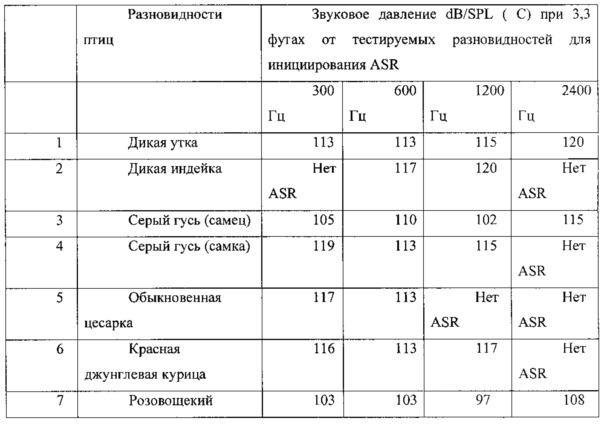
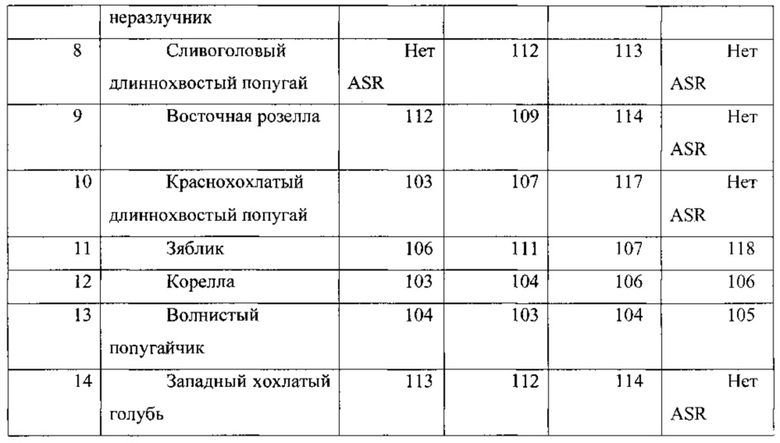
[0059] Таблица выше показывает для каждой разновидности птиц частоты и интенсивности звука, когда наблюдается ASR. Важно понимать, что вышеупомянутые звуковые давления должны быть достигнуты приблизительно в 3.3 футах от ушей различных разновидностей птиц. Чтобы достигнуть эту силу звука по крайней мере приблизительно на расстоянии в 110 ярдов от воздушной турбины, которое является минимальным расстоянием для различных разновидностей птиц, необходимым для реакции, искусственный сигнал зондирования в источнике должен быть значительно выше, чтобы компенсировать расстояние, скорость ветра и другие погодные условия. Это требует также звуковых излучателей, которые в состоянии фокусировать искусственный сигнал зондирования, чтобы минимизировать потерю звукового давления и/или ограничить шум вне области, для которой они предназначены.
[0060] Искусственный сигнал зондирования часто достаточен, чтобы инициировать ASR у птицы для удержания и/или отклонения птицы от окружающей среды. Однако в небольшом количестве ситуаций, если искусственный сигнал зондирования требуется для дальнейшего полного его прямого воздействия на птицу, возрастание величины ASR увеличивает сдерживание и/или удаление птицы от окружающей среды. В этих ситуациях искусственный сигнал зондирования может быть последовательно повторен с интервалами тишины между каждым искусственным сигналом зондирования, чтобы удержать и/или отклонить птицу от окружающей среды. В типичном варианте конструкции интервалы тишины составляют по продолжительности приблизительно 100 мс. Искусственный сигнал зондирования может изменяться по частоте и/или уровню мощности между повторениями.
ВОЗДЕЙСТВИЕ НА ПТИЦУ ТИПИЧНОГО ИСКУССТВЕННОГО СИГНАЛА ЗОНДИРОВАНИЯ НЕ ПОДВЕРГАЕТ ПТИЦУ СТРЕССУ И НЕ БЕСПОКОИТ ПТИЦУ
[0061] ФИГ. 7 иллюстрирует воздействие типичного искусственного сигнала зондирования на птицу согласно варианту настоящего изобретения. Инициализация ASR в птицах, таких как чайки 500, для примера, с использованием искусственного сигнала зондирования генерируемого средствами электроники акустического зондирующего сигнала, такого как генерируемого средствами электроники акустического зондирующего сигнала 600, для примера, чтобы активировать первичную акустическую цепь устрашения в птице, значительно не поднимает уровень глюкокортикоидных метаболитов, типа кортикостерона, в выделениях птицы. Кортикостерон - это 21 - углерод стероидный гормон кортикостероидного типа, продуцированный в железах надпочечников птицы. Как правило, большее количество кортикостерона присутствует в выделениях птицы, когда она подвергается стрессу или беспокойству. Как показано на ФИГ. 7, при экспозиции множественно повторяющегося искусственного сигнала зондирования, кортикостерон, имеющий место в выделениях птицы, по существу подобен кортикостерону, имеющему место в выделениях птицы, если она не подвергается воздействию искусственного сигнала зондирования. Это указывает, что инициирование ASR не активизирует гипоталамус - гипофизарно-надпочечную ось, поскольку генерируемый средствами электроники акустический зондирующий сигнал сначала обрабатывается в заднем мозгу, без активизации гипоталамуса. Активизация ASR у птицы может использоваться как метод влияния на ее поведение, поскольку она не воздействует, или по существу не воздействует, на уровень стресса и/или состояние птицы. Однако когда птица подвергнута естественным угрозам, как указано - от сигналов бедствия, запросов хищника и/или тревожных сигналов, для примера, кортикостерон, имеющий место в выделениях птицы, больше, чем кортикостерон, присутствующий в выделениях птицы, когда она подвергнута воздействию генерируемого средствами электроники акустического зондирующего сигнала.
ТИПИЧНЫЙ ГЕНЕРИРУЕМЫЙ СРЕДСТВАМИ ЭЛЕКТРОНИКИ АКУСТИЧЕСКИЙ ЗОНДИРУЮЩИЙ СИГНАЛ, ИМЕЮЩИЙ ИСКУССТВЕННЫЕ ЗОНДИРУЮЩИЕ СИГНАЛЫ И ЗВУКИ МОДУЛЯЦИИ, ДЛЯ УДЕРЖАНИЯ И/ИЛИ ОТКЛОНЕНИЯ ПТИЦ
[0062] Часто один или более интервалов искусственного сигнала зондирования генерируемого средствами электроники акустического зондирующего сигнала побуждают птиц отклоняться и/или удерживаться от входа в окружающую среду. Однако только в крайне редких случаях птица не реагирует на три или более повторений искусственного сигнала зондирования генерируемого средствами электроники акустического зондирующего сигнала. В этих ситуациях искусственный сигнал зондирования может последовательно подаваться с другими искусственными модуляционными звуками, чтобы сформировать другой генерируемый средствами электроники акустический зондирующий сигнал для отклонения и/или удержания птицы от входа в окружающую среду. Модуляционные звуки включают синтетические звуки, которые привлекают внимание птицы к источнику звука, являющиеся результатом модуляции за счет внимания, или они включают синтетические звуки, которые вызывают эмоции в птицах, приводящие к модуляции эмоциями. Искусственный сигнал зондирования, который вызывает ASR, может подаваться в последовательности с модуляционными звуками, чтобы сформировать другие генерируемые средствами электроники акустические зондирующие последовательности.
[0063] ФИГ. 8 иллюстрирует типичный генерируемый средствами электроники акустический зондирующий сигнал, имеющий типичный искусственный сигнал зондирования, который вызывает ASR и типичный звук модуляции согласно варианту настоящего изобретения. Генерируемая средствами электроники акустическая зондирующая последовательность 800 включает различные синтетические сигналы зондирования, различные модуляционные звуки и комбинации синтетических сигналов зондирования и модуляционных звуков. Биологические звуки как одна группа модуляционных звуков может вызывать реакции угрозы, которые признаются как естественная опасность для птицы. Эти биологические звуки, которые воспринимаются как приходящие от расположенного на близком расстоянии источника, усиливают предупреждение в мозге птицы. Это усиление делает птицу еще более чувствительной к устрашающим звуковым стимулам, и в типичном варианте биологические звуки позволяют снизить интенсивность звука, которая может закончиться по существу тишиной приблизительно за 500 мс до следующего крутого увеличения интенсивности звука, таким образом, избегая подавления пред-импульса (PPI) ASR. Установление последовательности между этими генерируемыми средствами электроники звуками, которые вызывают ASR, и биологическими звуками, создает модуляцию ASR, вызывая эмоцию, которая усиливает еще больше интенсивность ASR и готовность птицы избегать звуковые стимулы без стойкого привыкания.
[0064] Первый генерируемый средствами электроники модуляционный звук, также называемый как сигнал модуляции вниманием, представляет произведенный средствами электроники искусственный звук, который фокусирует относящийся к вниманию процесс животного. В типичном варианте первый сигнал зондирования характеризуется как изменение приблизительно от 300 Гц до приблизительно 6500 Гц при циклическом повторении в течение интервала от приблизительно 3 секунд до 5 секунд; однако другие частоты и/или продолжительности возможны, которые будут очевидны для специалистов в релевантной области(ях), не отступая от сущности и объема настоящего изобретения.
[0065] Второй генерируемый электронными средствами звук может характеризоваться как являющийся по существу интервалом тишины. Как правило интервал тишины длится в течение приблизительно 500 мс; однако другие продолжительности возможны, которые будут очевидны специалистам релевантной области(ей) техники, не отступая от сущности и объема настоящего изобретения. Интервал тишины должен прекратиться, пока процессы внимания в мозге птицы от предыдущего искусственного сигнала зондирования и/или предыдущего модуляционного звука сохраняются. Второй генерируемый средствами электроники звук может характеризоваться как исключение сенсорно-двигательного процесса пропускания в птице. Сенсорно-двигательные процессы пропускания понижают эффективную интенсивность вызывающих устрашение стимулов. Второй генерируемый средствами электроники звук обычно понижает подавление пред-импульса (PPI) у птицы, таким образом позволяя предыдущему искусственному сигналу зондирования и/или предыдущему модуляционному звуку быть более эффективным.
[0066] Третий генерированный средствами электроники модуляционный звук может характеризоваться как являющийся естественным звуком угрозы. Естественные звуки угрозы представляют различные звуки, которые вызывают реакцию модуляторной цепи в птицах, созданную естественными индикаторами опасности, которые узнаются птицами. Эти естественные звуки угрозы могут включать крики о бедствии, крики хищника, тревогу, типа криков предупреждения собственной разновидности или другой разновидности, или любые другие соответствующие звуки, которые обнаруживаются во всех местах обитания, которые будут очевидны специалистам в релевантной области(ях) без отступления от сущности и объема настоящего изобретения. В наиболее естественных местах обитания имеются некоторые птицы, крики которых используются всеми птицами в ареале обитания как предупредительный сигнал. Приоритет эффективности типа угроз - следующий: 1) крик о бедствии предупрежденных разновидностей, 2) крик хищника, специфичного для предупрежденных разновидностей, 3) крики бедствия разновидностей птиц, которые вообще распознаются другой разновидностью как индикатор предупреждения, 4) крик бедствия других разновидностей в ареале обитания. В типичном варианте естественный звук угрозы - очень специфичен для ареала обитания, и для каждого ареала обитания естественный звук угрозы должен быть изменен, чтобы представить звуки, которые существуют только в этом ареале обитания. Тогда чтобы быть наиболее эффективным естественный звук угрозы должен быть настолько этологически близким для птиц, насколько это возможно.
[0067] В типичном варианте может использоваться акустический логарифмический компенсатор расстояния (ALDC) для того, чтобы увеличить громкость более высоких частот в естественном звуке угрозы относительно более низких частот прогрессирующим образом, так как более высокие частоты больше поглощаются в атмосфере. Например, приходящий звук с расстояния приблизительно 165 ярдов должен иметь частотные характеристики, подобные тому же самому звуку с расстояния приблизительно 3.3 фута. Это вызывает то, что естественный звук угрозы кажется ближе птицам, чем они ожидают, что дополнительно увеличивает эмоциональную модуляцию естественных звуков угрозы.
[0068] Как показано на ФИГ. 8, за искусственным зондирующим сигналом, как изображено на ФИГ. 6 и ФИГ. 7, может следовать первый, второй и/или ИЛИ третий генерированный средствами электроники модуляционные звуки, чтобы сформировать генерируемую средствами электроники акустическую зондирующую последовательность 800. Например, генерируемая средствами электроники акустическая зондирующая последовательность 800 может характеризоваться как имеющая интервалы 802-816. В этом примере искусственный сигнал зондирования, как изображено на ФИГ. 6 и ФИГ. 7, может использоваться в течение первого интервала 802, четвертого интервала 808 и седьмого интервала 814, первый генерируемый средствами электроники модуляционный звук может использоваться в течение второго интервала 804, второй генерируемый средствами электроники модуляционный звук может использоваться в течение третьего интервала 806 и шестого интервала 812, а третий генерированный средствами электроники модуляционный звук может использоваться в течение пятого 810 и восьмого 816 интервалов. Однако этот пример - не ограничивающий, специалистам в релевантной области(ях) понятно, что другие комбинации искусственного зондирующего сигнала, как изображено на ФИГ. 6 и ФИГ. 7, и первого, второго и/или третьего генерированных средствами электроники модуляционных звуков могут последовать, чтобы сформировать генерируемый средствами электроники акустический зондирующий сигнал 800, не отступая от сущности и объема настоящего изобретения. Например, более длинные продолжительности для генерируемого средствами электроники акустического зондирующего сигнала 800 могут использоваться в окружающих условиях, типа аэропорта, например, где шум окружающего пространства не представляет большого интереса. Необходимо иметь в виду, что более короткие продолжительности генерируемого средствами электроники акустического зондирующего сигнал 800 могут использоваться в окружающих условиях, типа городов, для примера, где экологический шум имеет большее значение.
ТИПИЧНЫЕ ГЕНЕРИРУЕМЫЕ СРЕДСТВАМИ ЭЛЕКТРОНИКИ СВЕТОВЫЕ СИГНАЛЫ ДЛЯ УДЕРЖАНИЯ И/ИЛИ ОТКЛОНЕНИЯ ПТИЦ
[0069] Альтернативно или дополнительно генерируемые средствами электроники сдерживающие сигналы могут включать генерируемые средствами электроники световые сигналы, чтобы по существу оградить зону в пределах окружающей среды для удержания объекта от вхождения в зону и/или отклонения траектории объекта от зоны.
[0070] ФИГ. 9 иллюстрирует типичный генерируемый средствами электроники световой сигнал согласно варианту настоящего изобретения. Система предотвращения столкновения животных 900 обеспечивает генерируемый средствами электроники световой сигнал 906, чтобы по существу оградить зону в пределах окружающей среды для удержания объекта от вхождения в зону и/или отклонения траектории объекта от зоны. Объект может включать одно или более животных, таких как одна или более птиц, например, один или более других объектов кроме животных или любую их комбинации. Система предотвращения столкновения животных 900 может обеспечить генерируемый средствами электроники световой сигнал 906 совместно с другими генерируемыми средствами электроники сигналами, чтобы удержать и/или отклонять объект. Система предотвращения 900 столкновения животных может представлять собой типичный вариант системы предотвращения 102 столкновения животных.
[0071] Как показано на ФИГ. 9, система предотвращения 900 столкновения животных обеспечивает генерируемый средствами электроники световой сигнал 906, чтобы по существу оградить часть ветровой электростанции 904, имеющей воздушные турбины 902. Генерируемый средствами электроники световой сигнал 906 ограждает воздушную турбину 902, чтобы удержать птицу от вхождения в зону вблизи воздушной турбины 902 и/или отклонить траекторию птицы от зоны вблизи воздушной турбины 902. Это удерживание и отклонение может препятствовать тому, чтобы птица входила в контакт с воздушной турбиной 902.
[0072] Система предотвращения 900 столкновения животных включает один или более лазерных модулей, имеющих достаточное число лазеров, чтобы по существу оградить воздушную турбину 902 в пределах генерируемого средствами электроники светового сигнала 906. В типичном варианте система предотвращения 900 столкновения животных включает множественные модули с зелеными лазерами, которые все вместе производят приблизительно 300 лазерных лучей, каждый приблизительно мощностью 5 мВт, которые по существу ограждают воздушную турбину 902. Хотя зеленые лазеры предпочтительны, специалисты в релевантной области(ях) понимают, что другие цвета или комбинации цветов для лазерных модулей могут использоваться, не отступая от сущности и объема настоящего изобретения. Система предотвращения 900 столкновения животных может вызвать по существу одновременное активизирование одного или более лазерных модулей для излучения соответствующих лазерных лучей, или может вызвать рабочий цикл одного или более лазерных модулей такой, что первая группа лазеров из числа одного или более лазерных модулей одновременно активизирует соответствующие лазерные лучи, в то время как вторая группа лазеров из числа одного или более лазерных модулей является неактивной. Такой рабочий цикл лазеров может использоваться эффективно, вызывая изменчивый генерируемый средствами электроники световой сигнал 906, который как кажется находится в движении, таком как вспыхивание и выключение, например, для более ясного представления генерируемого средствами электроники светового сигнала 906 объекту при определенных условиях окружающей среды.
[0073] В типичном варианте система предотвращения 900 столкновения животных обеспечивает генерируемый средствам электроники световой сигнал 906 в условиях окружающей среды с более низкой освещенностью, таких как между приблизительно сумраком и приблизительно рассветом, например, для удержания и/или отклонения объекта в этих условиях окружающей среды с более низкой освещенностью. Однако специалисты в релевантной области(ях) понимают, что система предотвращения 900 столкновения животных обеспечивает генерируемый средствами электроники световой сигнал 906 в других условиях окружающей среды с более низкой освещенностью, а также в условиях окружающей среды с высокой освещенностью, таких как между приблизительно рассветом и приблизительно сумраком, например, не отступая от сущности и объема настоящего изобретения.
ТИПИЧНЫЕ ГЕНЕРИРУЕМЫЕ СРЕДСТВАМИ ЭЛЕКТРОНИКИ ЗВУКОВЫЕ СИГНАЛЫ ДЛЯ УДЕРЖАНИЯ И/ИЛИ ОТКЛОНЕНИЯ ЛЕТУЧИХ МЫШЕЙ
[0074] Безопасное отклонение летучих мышей использует совсем другую технологию, отличную от основанной на ASR подходе, как обсуждалось выше. Несколько исследований показали, что основной причиной гибели летучих мышей является не столкновение с лопастями воздушных турбин в пределах ветровой электростанции, а скорее значительные изменения давления, которые происходят от перемещения лопастей. Таким образом, летучие мыши поражаются большими изменениями давления, связанными с перемещением лопастей, которое разрывает их чувствительные легкие. Для предотвращения этого и чтобы не подвергать стрессу летучих мышей генерируемые средствами электроники сдерживающие сигналы могут включать генерируемые средствами электроники звуковые сигналы, препятствующие тому, чтобы летучие мыши подвергались воздействию значительных изменений давления, которые имеют место при перемещении лопастей.
[0075] ФИГ. 10А показывает типичный генерируемый средствами электроники звуковой сигнал согласно варианту настоящего изобретения. Система предотвращения 1020 столкновения животных обеспечивает генерируемый средствами электроники звуковой сигнал 1006, чтобы по существу оградить зону в пределах окружающей среды для удержания объекта от вхождения в зону и/или отклонения траектории объекта от зоны. Объект может включать одно или более животных, таких как одну или более летучей мышей, например, один или более других объектов кроме животных, или любую их комбинацию. Система предотвращения 1020 столкновения животных может обеспечивать генерируемый средствами электроники звуковой сигнал 1006 в сочетании с другими генерируемыми средствами электроники отпугивающими сигналами для удержания и/или отклонения объекта. Система предотвращения 1020 столкновения животных может представлять собой типичный вариант системы предотвращения 102 столкновения животных.
[0076] Как показано на ФИГ. 10, система предотвращения 1020 столкновения животных обеспечивает генерируемый средствами электроники звуковой сигнал 1006, чтобы по существу оградить воздушную турбину 1002. Генерируемый средствами электроники звуковой сигнал 1006 по существу ограждает воздушную турбину 1002, чтобы удержать летучих мышей от вхождения в зону, ближнюю к воздушной турбине 1002 и/или отклонить траекторию летучей мыши от зоны, ближней к воздушной турбине 1002. Это удержание и отклонение летучей мыши может препятствовать тому, чтобы летучая мышь подвергалась воздействию существенным изменениям давления, которые имеют место при перемещении лопастей воздушной турбины 1002.
[0077] Как правило, летучая мышь очень чувствительна к звукам в пределах первого частотного диапазона от приблизительно 4 кГц до приблизительно 7 кГц и второго частотного диапазона от приблизительно 22 кГц до приблизительно 24 кГц. Летучая мышь способна слышать звуки в пределах первого частотного диапазона, которые соответствуют частотному диапазону звуков ее добычи - летящих насекомых. Когда звуки летящего насекомого добычи присутствуют, летучая мышь для локализации летящего насекомого добычи полагается не на эхолокацию, а на свои способности слушать, чтобы локализовать летящее насекомое добычи. Система предотвращения 1020 столкновения животных может обеспечить генерируемый средствами электроники звуковой сигнал 1006, обычно мощностью выше 60 децибел, в первом частотном диапазоне, таким образом понижая способность летучей мыши использовать ее способности слушать для локализации добычи. Это делает летучих мышей неспособными охотиться за летящим насекомым добычи, что заставляет их избегать зоны, ближней к воздушной турбине 1002. Поэтому, когда генерируемый средствами электроники звуковой сигнал 1006 поддерживается в пределах достаточного радиуса, направленного наружу от воздушной турбины 1002, летучая мышь скоро осознает, что в пределах этой зоны безопасности она не может охотиться за летящим насекомым добычи, поскольку ее способности слышать частично выведены из строя. В типичном варианте первый частотный диапазон имеет достаточные характеристики распространения в атмосфере, чтобы позволить генерируемому средствами электроники звуковому сигналу 1006 распространяться на расстояния, больше, чем 100 метров, чтобы сохранить достаточный радиус, направленный наружу от воздушной турбины 1002.
[0078] ФИГ. 10В иллюстрирует типичную эффективность генерируемого средствами электроники звукового сигнала при удержании и/или отклонении летучей мыши, работая в первом частотном диапазоне согласно варианту настоящего изобретения. Как показано на ФИГ. 10В, коэффициент отклонения летучей мыши - приблизительно 92%, когда генерируемый средствами электроники звуковой сигнал 1006 имеет уровень мощности приблизительно 10 Вт. Увеличение уровня мощности генерируемого средствами электроники звукового сигнала 1006 до приблизительно 30 Вт приводит к коэффициенту отклонения приблизительно 99%.
[0079] Обратимся снова к ФИГ. 10А, откуда очевидно, что второй частотный диапазон может использоваться, чтобы создать зону безопасности, в которой летучая мышь не может осуществлять эхолокацию. Генерируемый средствами электроники звуковой сигнал 1006 повреждает способность летучей мыши обнаруживать эхо, отраженное от окружающей среды. Эта зона безопасности походит на густой туман для человеческих глаз. Важно подчеркнуть, что генерируемый средствами электроники звуковой сигнал 1006 полностью не повреждает эхолокацию летучей мыши, поскольку летучая мышь может все еще летать в этой зоне без замешательства. Только ее способности охотиться затрагиваются в этой зоне безопасности.
[0080] Система предотвращения 1020 столкновения животных может обеспечить генерируемый средствами электроники звуковой сигнал 1006 в любой комбинации первого и второго частотных диапазонов, чтобы обеспечить более эффективную зону безопасности для удержания и/или отклонения летучих мышей от того, чтобы подвергаться существенным изменениям давления, которые имеют место при перемещении лопастей. Так как летучая мышь имеет высокий метаболизм, она не может позволить себе лететь в областях, где эффективность ее слуха и/или эхолокации понижаются, и летучая мышь скоро узнает, что не может летать в этой зоне безопасности, создаваемой генерируемым средствами электроники звуковым сигналом 1006. Как только летучая мышь оставляет эту зону безопасности, ее слух и/или ее эхолокация полностью восстанавливаются. Это создает долговременное решение минимизации или устранения жертв летучих мышей от ветровой электростанции 1004.
ТИПИЧНЫЕ ОКРУЖАЮЩИЕ СРЕДЫ ДЛЯ УСТАНОВКИ СИСТЕМЫ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ ЖИВОТНЫХ
[0081] Различные типичные окружающие среды, где система предотвращения столкновения животных может быть расположена, будут обсуждаться ниже. Однако это не ограничивающие типичные окружающие среды, специалистам в релевантной области(ях) понятно, что система предотвращения столкновения животных может использоваться в пределах других окружающих сред, таких как местонахождение нефтеносного песка, нефтяная платформа, судно, сельхозугодия, местонахождение открытой горной разработки, военная база, область индустриальной опасности, оборудование для хранения пищи, химическое оборудование, место игры в гольф, больница, здание, место стоянки автомобилей, например, не отступая от сущности и объема настоящего изобретения.
ТИПИЧНАЯ УСТАНОВКА СИСТЕМЫ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ ЖИВОТНЫХ В ПРЕДЕЛАХ ВЕТРОВОЙ ЭЛЕКТРОСТАНЦИИ ВЕТРА
[0082] ФИГ. 11 иллюстрирует типичную установку системы предотвращения столкновения животных в пределах ветровой электростанции согласно типичному варианту настоящего изобретения. Система предотвращения 1104 столкновения животных обеспечивает один или более генерируемые средствами электроники сдерживающие сигналы, чтобы удержать объект от ветровой электростанции 1100 и/или отклонить траекторию объекта от ветровой электростанции 1100. Объект может включать одно или более животных, один или более других объектов кроме животных или любую их комбинацию. Система предотвращения 1100 столкновения животных может представлять собой типичный вариант системы предотвращения 102 столкновения животных.
[0083] Как показано на ФИГ. 11, ветровая электростанция 1100 включает одну или более воздушных турбин 1102 для преобразования кинетической энергии ветра, также называемой ветровой энергией, в механическую энергию, которая используется для генерирования электричества. Система предотвращения 1104 столкновения животных может быть присоединена непосредственно или достаточно близко к одной или более воздушных турбин 1102, чтобы удерживать и/или отклонять животное, такое как птица или летучая мышь, например. Система предотвращения 1104 столкновения животных может обеспечить различные генерируемые средствами электроники акустические зондирующие сигналы, такие как изображенные на ФИГ. 5-ФИГ. 8, различные генерируемые средствами электроники световые сигналы, такие как изображенные на ФИГ. 9, и/или различные генерируемые средствами электроники звуковые сигналы, такие как изображенные на ФИГ. 10А и ФИГ. 10В, для удерживания и/или отклонения животного.
[0084] ФИГ. 12 далее иллюстрирует систему предотвращения столкновения животных, которая может быть установлена в пределах воздушной турбины согласно типичному варианту настоящего изобретения. Система предотвращения 1200 столкновения животных обеспечивает один или более генерируемых средствами электроники сдерживающих сигналов, чтобы удержать объект от ветровой электростанции, такой как ветровая электростанции 1100, для примера, и/или отклонить траекторию объекта от ветровой электростанции. Объект может включать одно или более животных, один или более других объектов кроме животных или любую их комбинацию. Система предотвращения 1100 столкновения животных может представлять собой типичный вариант системы предотвращения 102 столкновения животных. Система предотвращения 1200 столкновения животных может быть установлена или прикреплена на опорное основание 1202 воздушной турбины, такой как воздушная турбина 1102, для примера. Система предотвращения 1200 столкновения животных может быть присоединена к опорному основанию 1202 с использованием приваривающих шпилек или любого другого соответствующего способа, который будет очевиден специалистам в релевантной области(ях), не отступая от сущности и объема настоящего изобретения.
[0085] Система предотвращения 1200 столкновения животных включает модуль обнаружения 1204 и модуль сдерживания 1206. Модуль обнаружения 1204 распознает птицу и/или летучую мышь в пределах ветровой электростанции 1100, как изображено на ФИГ. 1-ФИГ. 3. Модуль обнаружения 106 включает один или более тепловых формирующих изображение датчиков 1208 для обнаружения энергии, исходящей от птицы и/или летучей мыши в пределах областей видимости. В типичном варианте один или более тепловых отображающих датчиков 1208 установлены на поворотные устройства тепловых датчиков, которые поворачивают один или более тепловых отображающих датчиков 1208 на приблизительно 180° в горизонтальной плоскости. В этом типичном варианте множество тепловых отображающих датчиков 1208 могут использоваться, чтобы обеспечить обзор приблизительно 360° вокруг воздушной турбины.
[0086] Модуль сдерживания 1206 активизирует одно или более средств отпугивания, чтобы удержать и/или отклонить птицу и/или летучую мышь, как изображено на ФИГ. 1 и ФИГ. 4-ФИГ 10В. Модуль сдерживания 1206 может включать один или более лазерных модулей 1210, чтобы по существу оградить воздушную турбину 1102 в пределах генерируемого средствами электроники светового сигнала, для примера, для удержания и/или отклонения птицы от зоны, ближней к воздушной турбине 1102, как изображено на ФИГ. 1 и ФИГ. 9. В типичном варианте один или более лазерных модулей 1210 все вместе включают приблизительно 300 лазерных лучей, каждый приблизительно 5 мВт, чтобы по существу оградить воздушную турбину генерируемым средствами электроники световым сигналом.
[0087] Модуль сдерживания 1206 может дополнительно включать один или более звуковых преобразователей 1212, чтобы отклонить и/или удержать птицу в соответствии с различным генерируемым средствами электроники акустическим зондирующим сигналом, как изображено на ФИГ 1-ФИГ. 8. В типичном варианте один или более звуковых преобразователей 1212 способны излучать силу звука приблизительно 112 децибел приблизительно в 350 футах для частот приблизительно между 300 Гц и приблизительно 6500 Гц в погодных условиях, включающих скорость ветра от приблизительно 22 до приблизительно 34 миль/час.
[0088] Модуль сдерживания 1206 может далее включать один или более звуковых преобразователей 1214, чтобы отклонить и/или удержать летучую мышь в соответствии с различными генерируемыми средствами электроники звуковыми сигналами, как изображено на ФИГ. 1 и ФИГ. 10А-ФИГ. 10В. Один или более звуковых преобразователей 1214 могут произвести звуки высокой интенсивности между приблизительно 4 кГц и приблизительно 7 кГц и/или между приблизительно 22 кГц и приблизительно 24 кГц. Модуль сдерживания 1206 может включать любую комбинацию одного или более лазерных модулей 1210, одного или более звуковых преобразователей 1212 и/или одного или более звуковых преобразователей 1214.
ТИПИЧНАЯ УСТАНОВКА СИСТЕМЫ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ ЖИВОТНЫХ В ПРЕДЕЛАХ АЭРОПОРТА
[0089] ФИГ. 13 иллюстрирует типичную установку системы предотвращения столкновения животных в пределах аэропорта согласно типичному варианту настоящего изобретения. Аэропорт 1300 включает одну или более взлетно-посадочных полос аэропорта 1302.1-1302.k, которые используются воздушными судами, такими как самолет с фиксированным крылом, вертолеты и/или аэростат, для примера, для прилета и/или вылета. Дополнительно аэропорт 1300 может включать вертолетную площадку или воду для прилета и/или вылета, и часто включает здания, такие как контрольно-диспетчерских пункты, ангары и здания терминалов, для примеров. Системы предотвращения 1304.1-1304.n столкновения животных обеспечивают один или более генерируемые средствами электроники сдерживающие сигналы для удержания объекта от взлетно-посадочных полос аэропорта 1302.1-1302.k и/или отклонения траектории объекта от взлетно-посадочных полос аэропорта 1302.1-1302.k. Объект может включать одно или более животных, один или более других объектов кроме животных или любую их комбинацию. Одна или более систем предотвращения 1304.1-1304.n столкновения животных может представлять собой типичный вариант системы предотвращения 102 столкновения животных.
[0090] В типичном варианте первая группа систем предотвращения столкновения животных 1304.1-1304.n может быть размещена вблизи от взлетно-посадочных полос аэропорта 1302.1-1302.k, чтобы удержать птицу и/или летучую мышь от взлетно-посадочных полос аэропорта 1302.1-1302.k или отклонить траекторию птицы от взлетно-посадочных полос аэропорта 1302.1-1302.k. Некоторые из систем предотвращения 1304.1-1304.n столкновения животных могут быть размещены таким образом вблизи от взлетно-посадочных полос аэропорта 1302.1-1302.k, чтобы удержать птицу и/или летучую мышь от входа в восходящие и нисходящие пути самолета, когда он прибывает и/или вылетает из аэропорта 1300. Эти компоненты конфигурированы, чтобы удержать птицу и/или летучую мышь, когда самолеты ускоряются на взлетно-посадочных полосах аэропорта 1302.1-1302.k и/или снижаются к взлетно-посадочным полосам аэропорта 1302.1-1302.k. Произвольно вторая группа систем предотвращения 1304.1-1304.n столкновения животных может быть размещена между взлетно-посадочными полосами аэропорта 1302.1-1302.k, чтобы отпугнуть птицу и/или летучую мышь от укрытия или обитания между взлетно-посадочными полосами аэропорта 1302.1-1302.k.
[0091] Системы предотвращения 1304.1-1304.n столкновения животных могут обеспечить различные генерируемые средствами электроники акустические зондирующие сигналы, такие как изображено на ФИГ. 1 и ФИГ. 5-ФИГ. 8, различные генерируемые средствами электроники световые сигналы, такие как изображено на ФИГ. 1 и ФИГ. 9, различные генерируемые средствами электроники звуковые сигналы, такие как изображено на ФИГ. 1, ФИГ. 10А и ФИГ. 10В, чтобы удерживать и/или отклонять птицу и/или летучую мышь.
[0092] ФИГ. 14 далее иллюстрирует конфигурацию и расположение различных систем предотвращения столкновения животных вблизи различных взлетно-посадочных полос аэропорта в пределах аэропорта согласно типичному варианту настоящего изобретения. Системы предотвращения 1400.1-1400.i столкновения животных могут быть размещены вблизи взлетно-посадочной полосы аэропорта 1402, такого как аэропорт 1300, для примера, чтобы удержать животное, такое как птицы или летучая мышь, например, от взлетно-посадочной полосы аэропорта 1402 или отклонить траекторию животного от взлетно-посадочной полосы аэропорта 1402. Системы предотвращения 1400.1 до 1400.i столкновения животных могут быть размещены в различных местах вблизи взлетно-посадочной полосы аэропорта 1402 в соответствии с различными регламентами Федерального управления авиации (FAA) и/или другими локальными регламентами. Различные регламенты FAA и/или другие локальные регламенты гарантируют, что системы предотвращения 1400.1-1400.i столкновения животных находятся на безопасных расстояниях от взлетно-посадочной полосы аэропорта 1402, чтобы по существу не влиять на действие самолета. Системы предотвращения 1400.1-1400.i столкновения животных и взлетно-посадочная полоса аэропорта 1402 могут представлять собой типичные варианты систем предотвращения 1304.1-1304.n столкновения животных и одной из взлетно-посадочных полос аэропорта 1302.1-1302.k соответственно.
[0093] Системы предотвращения 1400.1-1400.i столкновения животных сканируют части взлетно-посадочной полосы аэропорта 1402 в пределах их соответствующих областей видимости 1404.1-1404.i, чтобы обнаружить присутствие птицы или летучей мыши. После обнаружения присутствия птицы или летучей мыши и определения их локализации в пределах взлетно-посадочной полосы аэропорта 1402 системы предотвращения 1400.1-1400.i столкновения животных обеспечивают различные генерируемые средствами электроники акустические зондирующие сигналы 1404.1-1404.i, чтобы удержать и/или отклонить птицу и/или летучую мышь. Как показано на ФИГ. 14, генерируемые средствами электроники акустические зондирующие сигналы 1404.1-1404.i перекрывают смежные генерированные средствами электроники акустические зондирующие сигналы 1404.1-1404.i и позволяют системам предотвращения 1400.1-1400.i столкновения животных удерживать и/или отклонять птицу и/или летучую мышь от взлетно-посадочной полосы аэропорта 1402. Например, генерируемый средствами электроники акустический зондирующий сигнал 1404.2, который соответствует системе предотвращения 1400.2 столкновения животных, которая перекрывает генерируемый средствами электроники акустический зондирующий сигнал 1404.1, который соответствует системе предотвращения 1400.1 столкновения животных, и генерируемый средствами электроники акустический зондирующий сигнал, который соответствует системе предотвращения 1400.i столкновения животных.
[0094] ФИГ. 15 далее иллюстрирует одну из систем предотвращения столкновения животных, которая может быть установлена в пределах аэропорта согласно типичному варианту настоящего изобретения. Система предотвращения 1500 столкновения животных обеспечивает один или более генерируемые средствами электроники сдерживающие сигналы, чтобы удержать объект от аэропорта, такого как аэропорт 1300, для примера, и/или отклонить траекторию объекта от аэропорта. Объект может включать одно или более животных, один или более других объектов кроме животных или любую их комбинацию. Система предотвращения 1500 столкновения животных может быть установлена или прикреплена на установочное основание 1502, которое соединено с опорным основанием в установленном местоположении вблизи взлетно-посадочной полосы аэропорта, с использованием сертифицированных безопасных болтов или любого другого соответствующего способа, который очевиден специалистам в релевантной области(ях), не отступая от сущности и объема настоящего изобретения. Система предотвращения 1500 столкновения животных может представлять собой типичный вариант системы предотвращения 102 столкновения животных.
[0095] Система предотвращения 1500 столкновения животных включает модуль обнаружения 1504 и модуль сдерживания 1510. Модуль обнаружения 1504 распознает птицу и/или летучую мышь в пределах взлетно-посадочной полосы аэропорта, как изображено на ФИГ. 1-ФИГ. 3. Модуль обнаружения 1504 включает модуль стерео обнаружения 1506 для обнаружения энергии, исходящей от птицы и/или летучей мыши в пределах его области видимости. В типичном варианте модуль стерео обнаружения 1506 включает одну или более камер, которые способны работать в условиях окружающей среды с низкой освещенностью, чтобы распознавать перемещение птицы и/или летучей мыши в Декартовой системе координат. Модуль обнаружения 1504 может произвольно включать модули 1508 излучения в инфракрасной области (IR), чтобы освещать область обзора модуля обнаружения 1504 в случае, если световые условия аэропорта требуют усиления для лучшей идентификации птицы и/или летучей мыши.
[0096] Модуль сдерживания 1510 активизирует один или более генерируемые средствами электроники сдерживающие сигналы, чтобы удержать и/или отклонить птицу и/или летучую мышь, как изображено на ФИГ. 1 и ФИГ. 4-ФИГ. 10В. Модуль сдерживания 1510 может включать акустический модуль, выполненный с возможностью позиционирования. Акустический модуль включает акустическую систему, которая способна направлять генерируемые средствами электроники сдерживающие сигналы на птицу и/или летучую мышь, используя позиционирующую информацию от модуля стерео обнаружения 1506. Дополнительно модуль сдерживания 1510 может быть автоматически дезактивирован, когда человек обнаружен в пределах области видимости модуля обнаружения 1504.
[0097] Система предотвращения 1500 столкновения животных может произвольно включать модуль радиочастотной (RF) связи 1512 для беспроводного сообщения информации, такой как команды и/или данные, для примера, между системой предотвращения 1500 столкновения животных и удаленным Экологическим Центром Данных или между системой предотвращения 1500 столкновения животных и другими системами предотвращения столкновения животных. Альтернативно или дополнительно система предотвращения 1500 столкновения животных может связываться с удаленным Экологическим Центром Данных и/или другими системами предотвращения столкновения животных, используя различные проводные системы связи.
ТИПИЧНЫЕ СЕТИ СИСТЕМ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ ЖИВОТНЫХ ВНУТРИ ТИПИЧНЫХ ОКРУЖАЮЩИХ СРЕД
[0098] ФИГ. 16 иллюстрирует коммуникативно связанную сеть систем предотвращения столкновения животных согласно типичному варианту настоящего изобретения. В целом система предотвращения столкновения животных может быть коммуникативно соединена с другими системам предотвращения столкновения животных и/или удаленным Экологическим Центром Данных, чтобы сформировать сеть систем предотвращения 1600 столкновения животных. Это соединение позволяет системе предотвращения столкновения животных обмениваться информацией, такой как команды и/или данные, между системами предотвращения столкновения животных и/или удаленным Экологическим Центром Данных. Сеть систем предотвращения 1600 столкновения животных включает системы предотвращения 1602.1-1602.s столкновения животных и удаленный Экологический Центр Данных 1604, которые коммуникативно соединены через систему связи 1608. Сеть систем предотвращения 1600 столкновения животных может быть реализована в пределах воздушной турбины, ветровой электростанции, взлетно-посадочной полосы аэропорта или материального пространства рядом со взлетно-посадочной полосой аэропорта, местонахождения нефтеносного песка, нефтяной платформы, судна, сельхозугодий, местонахождения открытой горной разработки, военной базы, области индустриальной опасности, оборудования для хранения пищи, химического оборудования, места игры в гольф, больницы, здания, места стоянки автомобилей и/или любого другого окружающего пространства, которое очевидно специалистам в релевантной области(ях), не отступая от сущности и объема настоящего изобретения.
[0099] Системы предотвращения 1602.1-1602.s столкновения животных могут включать любое соответствующее число систем предотвращения столкновения животных, которое обычно зависит от окружающей среды. Например, десятки систем предотвращения 1602.1-1602.S столкновения животных могут использоваться, чтобы удержать и/или отклонить объект от ветровой электростанции, тогда как сотни систем предотвращения 1602.1-1602.S столкновения животных могут использоваться, чтобы удержать и/или отклонить объект от аэропорта. Системы предотвращения 1602.1 - до 1602.S столкновения животных могут обеспечивать различные генерируемые средствами электроники акустические зондирующие сигналы, как изображено на ФИГ. 1 и ФИГ. 5-ФИГ. 8, различные генерируемые средствами электроники световые сигналы, как изображено на ФИГ. 1 и ФИГ. 9, различные генерируемые средствами электроники звуковые сигналы, типа изображенных на ФИГ. 1, ФИГ. 10А и ФИГ. 10В, чтобы удерживать объекты от сети систем предотвращения 1600 столкновения животных и/или отклонять объекты от сети систем предотвращения 1600 столкновения животных. Объекты могут включать одно или более животных, один или более других объектов кроме животных или любую их комбинацию. В типичном варианте одна из систем предотвращения 1602.1-1602.S столкновения животных может обеспечить информацию слежения объекта в пределах области видимости, чтобы помочь системам предотвращения 1602.1-1602.S столкновения животных обнаружить объект, а также следить или следовать за объектом, когда он приближается и/или входит в соответствующие области видимости.
[0100] Системы предотвращения 1602.1-1602.S столкновения животных могут сообщать информацию друг к другу, а также удаленному Экологическому Центру Данных 1604. Например, одна или более систем предотвращения 1602.1-1602.S столкновения животных может обеспечить изображение, видео и/или аудио объекта в пределах областей видимости и произвольно параметры движения и/или характеристики объекта друг другу и/или удаленному Экологическому Центру Данных 1604 для анализа. Это может иметь место, например, когда одна из систем предотвращения 1602.1-1602.S столкновений животных не способна распознать объект в пределах своей зоны видимости.
[0101] Удаленный Экологический Центр Данных 1604 контролирует полную конфигурацию и/или действие систем предотвращения 1602.1-1602.S столкновения животных. Инженеры в пределах удаленного Экологического Центра Данных 1604 могут контролировать рабочие характеристики систем предотвращения 1602.1-1602.S столкновения животных. Например, удаленный Экологический Центр Данных 1604 может получать изображения, видео и/или аудио объектов в пределах областей видимости систем предотвращения 1602.1-1602.S столкновения животных и произвольно параметры движения и/или характеристики объектов, которые системы предотвращения 1602.1-1602.S столкновений животных не способны распознать. В этой ситуации инженеры в пределах удаленного Экологического Центра Данных могут независимо анализировать изображения, видео и/или аудио объектов, а также параметры движения и/или характеристики объектов, чтобы независимо распознать объекты. Удаленный Экологический Центр Данных может затем обновить параметры движения и/или характеристики, используемые системами предотвращения 1602.1-1602.S столкновения животных, чтобы обеспечить системы предотвращения 1602.1-1602.S столкновения животных этими недавно распознанными объектами в будущем.
[0102] Как другой пример, удаленный Экологический Центр Данных 1604 может дистанционно формировать различные средства отпугивания, используемые системами предотвращения 1602.1-1602.S столкновения животных, такие как различные генерируемые средствами электроники акустические зондирующие сигналы, различные генерируемые средствами электроники световые сигналы и/или различные генерируемые средствами электроники звуковые сигналы, которые используются системами предотвращения 1602.1-1602.S столкновения животных, чтобы удержать и/или отклонить объект. Например, удаленный Экологический Центр Данных 1604 может повторно формировать различные интервалы генерируемых средствами электроники акустических зондирующих сигналов, а также синтетических сигналов зондирования в пределах каждого интервала, лазерные модули, а также лазеры в пределах лазерных модулей, которые излучают генерируемые средствами электроники световые сигналы, и/или звуковые преобразователи, которые излучают генерируемые средствами электроники звуковые сигналы. Как другой пример, удаленный Экологический Центр Данных 1604 может обеспечить информацию для систем предотвращения 1602.1-1602.S столкновения животных для использования в удержании и/или отклонении любых недавно обнаруженных объектов.
[0103] Сеть связи 1608 коммуникативно соединяет системы предотвращения 1602.1-1602.S столкновения животных и удаленный Экологический Центр Данных 1604. Система связи 1608 может включать любую соответствующую беспроводную сеть связи, такую как сотовая сеть, для примера, любую соответствующую проводную систему связи, такую как оптоволоконная сеть или кабельная сеть, для примера, или любую комбинацию беспроводной и проводной систем связи.
ЗАКЛЮЧЕНИЕ
[0104] Следует понимать, что раздел Детализированного Описания, а не раздел Реферата предназначен для использования при интерпретировании формулы изобретения. Раздел реферата может отражать один или более, но не все типичные варианты изобретения, и таким образом никоим образом не предназначен, чтобы ограничить изобретение и прилагаемую формулу.
[0105] Изобретение было описано выше при помощи функционально построенных блоков, поясняющих выполнение указанных функций и их взаимодействие. Границы этих функционально построенных блоков были произвольно определены здесь для удобства описания. Дополнительные границы могут быть определены, насколько указанные функции и их взаимодействия соответственно осуществлены.
[0106] Для специалистов очевидно, что различные изменения в форме и деталях могут быть сделаны, не отступая от сущности и объема изобретения. Таким образом изобретение не должно быть ограничено ни одним из вышеописанных типичных вариантов, но должно быть определено только в соответствии с последующей формулой изобретения и ее эквивалентами.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АКУСТИЧЕСКОГО ПРЕДСТАВЛЕНИЯ ПРОСТРАНСТВЕННОЙ ИНФОРМАЦИИ ДЛЯ ИНВАЛИДОВ ПО ЗРЕНИЮ | 1993 |
|
RU2085162C1 |
| СПОСОБ ОПОВЕЩЕНИЯ ВОДИТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА И ТРАНСПОРТНОЕ СРЕДСТВО | 2017 |
|
RU2668350C9 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ОРНИТОЛОГИЧЕСКОЙ БЕЗОПАСНОСТИ ПОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2019 |
|
RU2736425C1 |
| Способ оценки собственного местоположения транспортного средства, преимущественно высокоскоростного поезда, и устройство для оценки собственного местоположения транспортного средства, преимущественно высокоскоростного поезда | 2023 |
|
RU2809391C1 |
| СПОСОБ ПОДГОТОВКИ ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ ЛЕТНОГО БАССЕЙНА ГИДРОАЭРОДРОМА ДЛЯ ВЫПОЛНЕНИЯ ВЗЛЕТА И ПРИВОДНЕНИЯ ГИДРОСАМОЛЕТА | 2013 |
|
RU2539039C1 |
| УСТРОЙСТВО СПАСЕНИЯ НА ЖЕЛЕЗНОДОРОЖНЫХ ПУТЯХ И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2012 |
|
RU2498914C1 |
| СПОСОБ ГИДРОЛОКАЦИИ В МЕЛКОВОДНЫХ ОБЛАСТЯХ С ОПЕРАТИВНЫМ КОНТРОЛЕМ ИЗМЕНЧИВОСТИ УСЛОВИЙ ОБНАРУЖЕНИЯ ПОДВОДНОЙ ЦЕЛИ | 2017 |
|
RU2664869C1 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ НАБЛЮДАЕМОГО ОБЪЕКТА ПО ГЛУБИНЕ В ВОДНОЙ СРЕДЕ | 2007 |
|
RU2343502C2 |
| СПОСОБ ПРОСВЕТНОГО АКУСТИЧЕСКОГО ЗОНДИРОВАНИЯ ЛЕГКИХ | 2009 |
|
RU2412647C1 |
| УСТРОЙСТВО ОПЕРАТИВНОГО ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ В АКВАТОРИЯХ МИРОВОГО ОКЕАНА | 2012 |
|
RU2522168C2 |
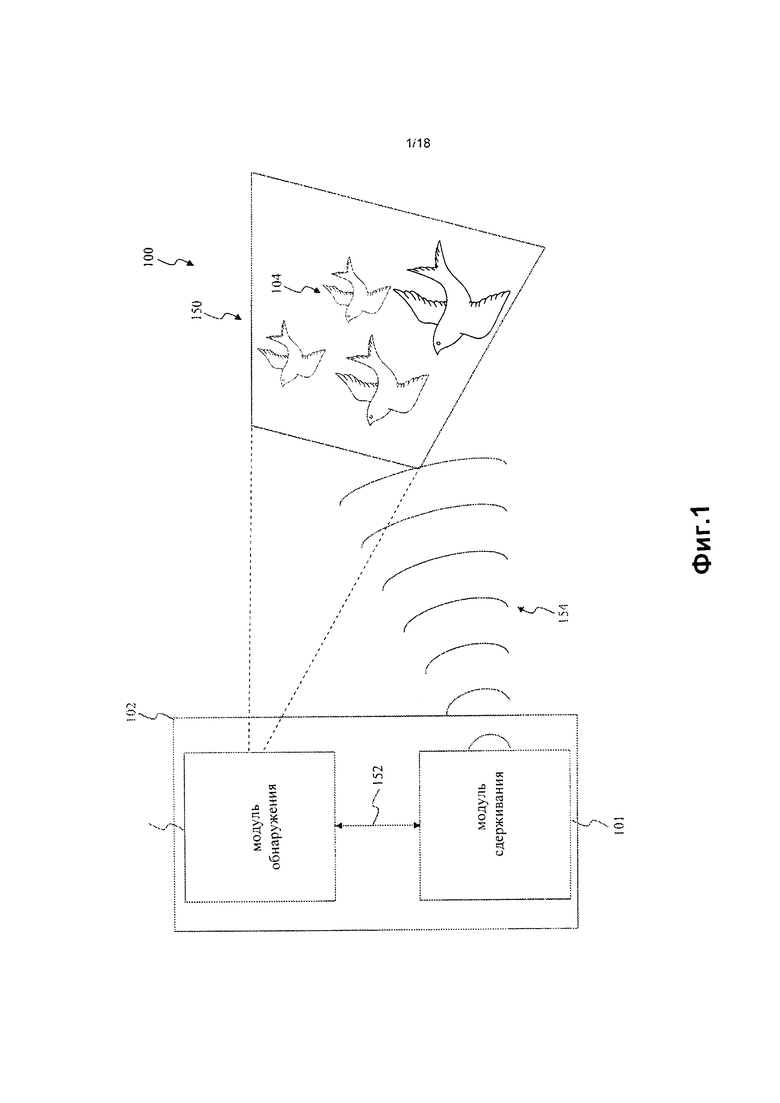
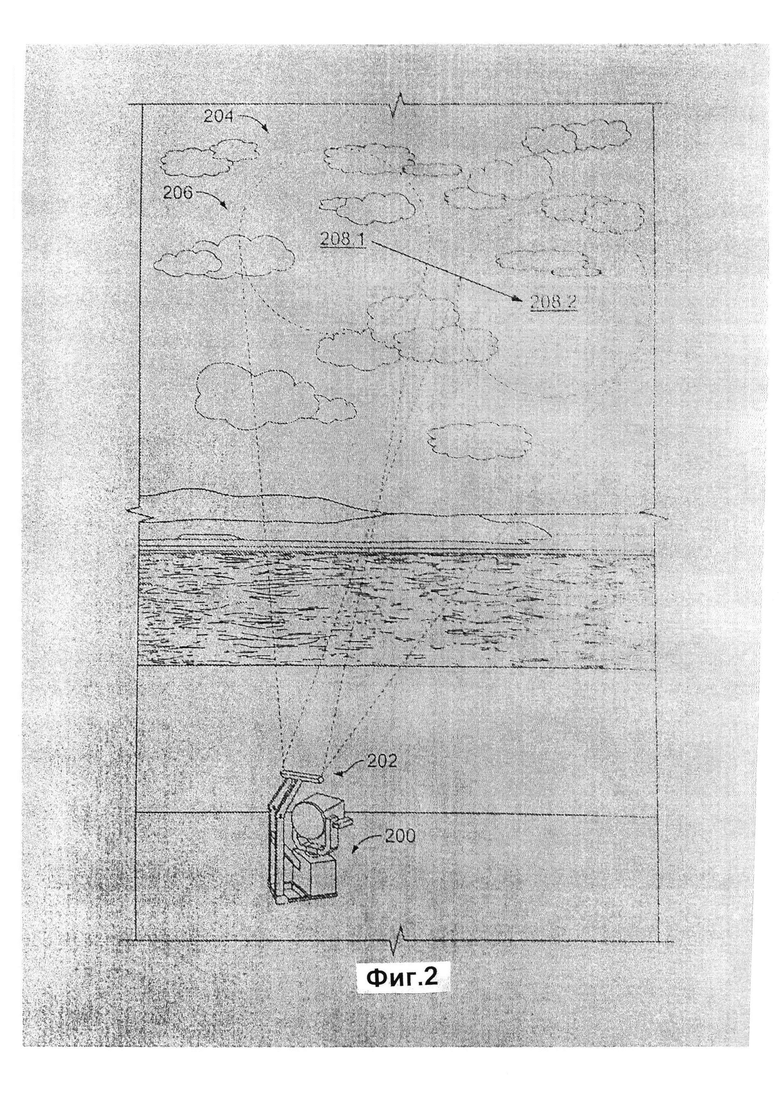


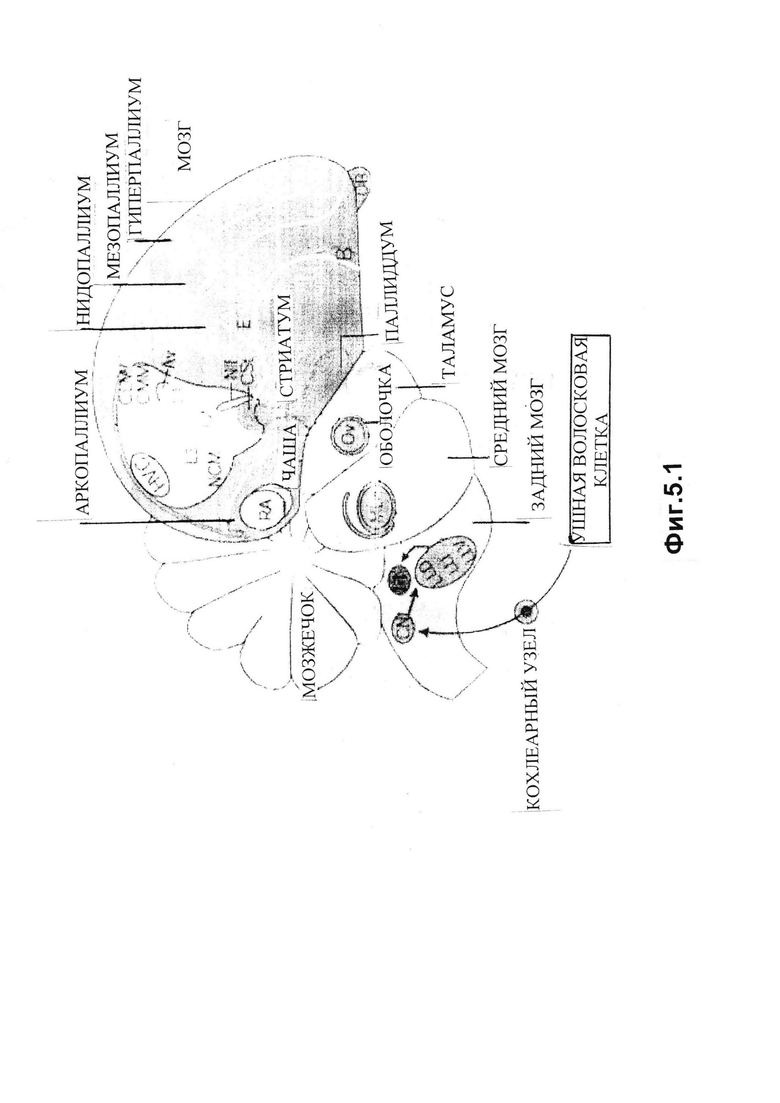

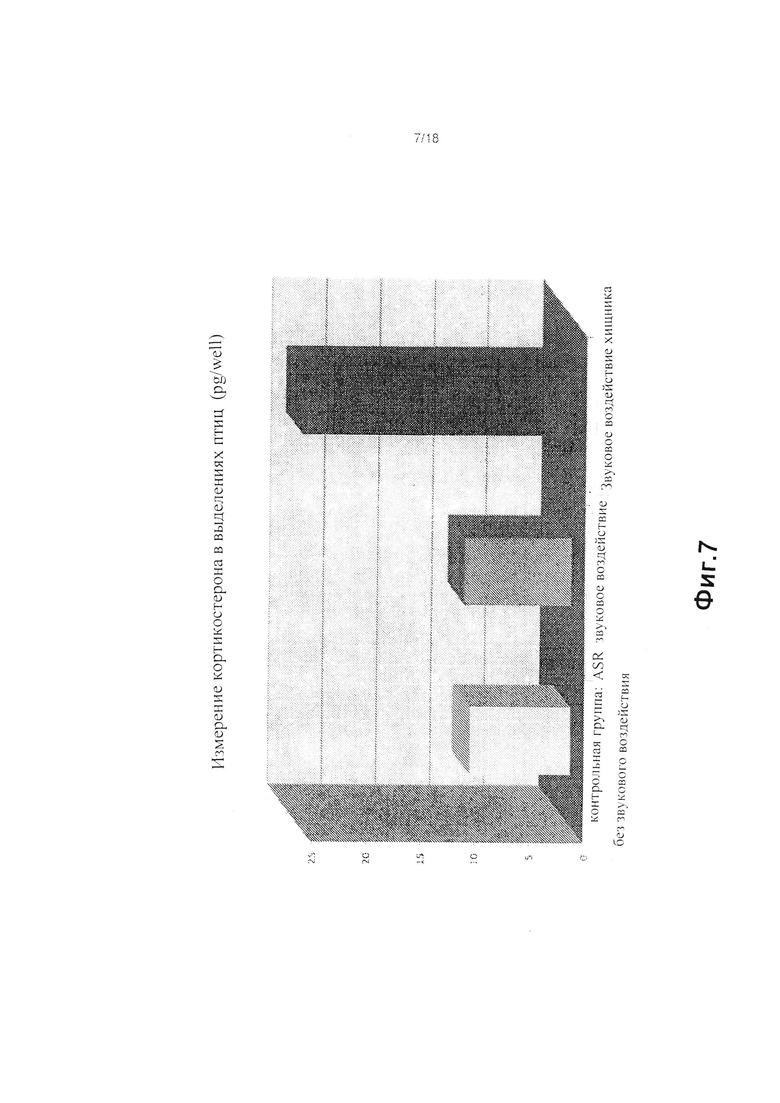
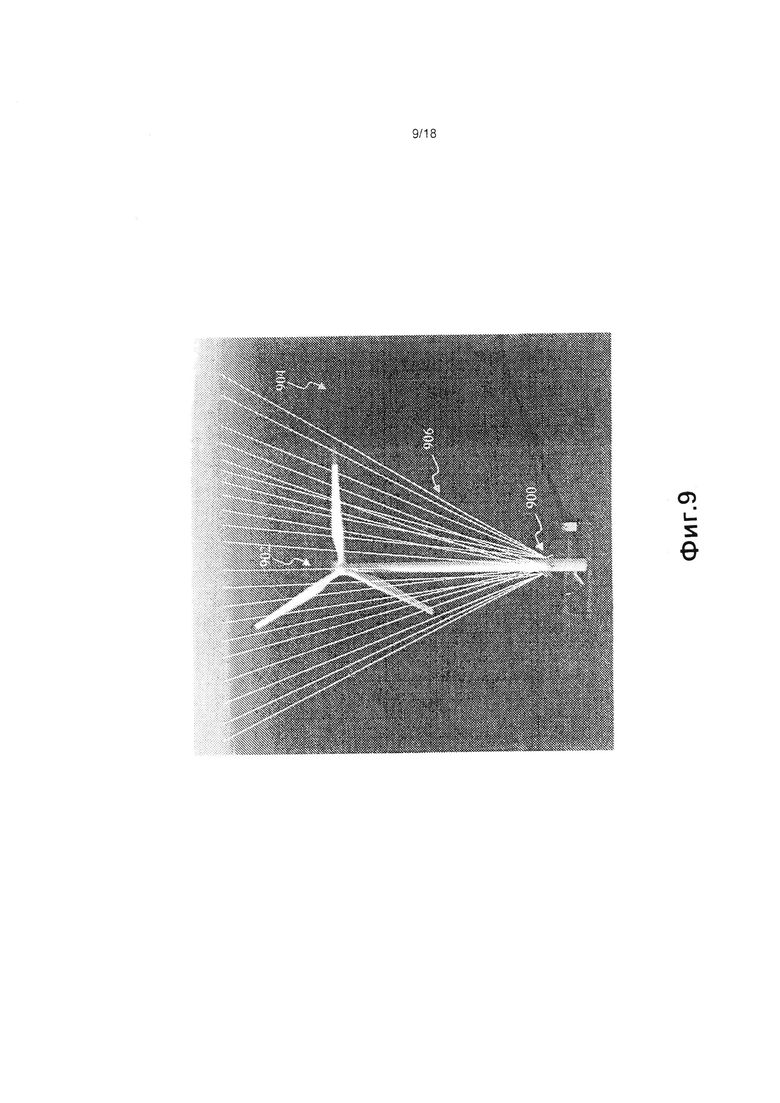

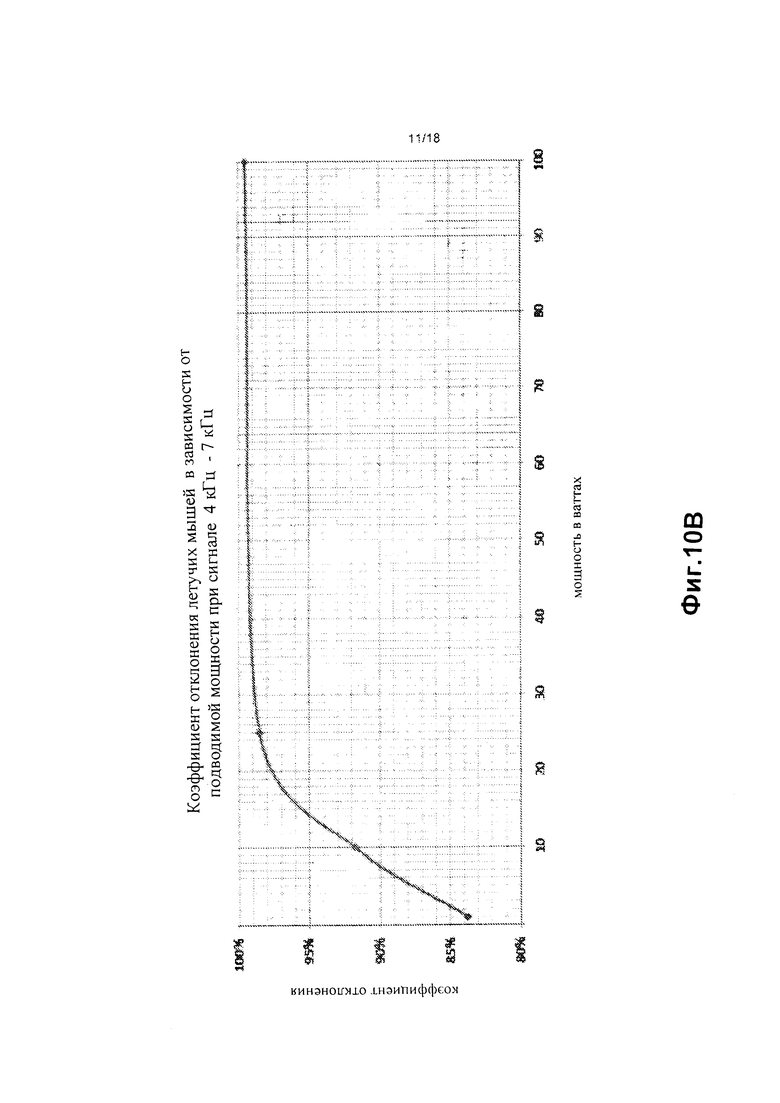

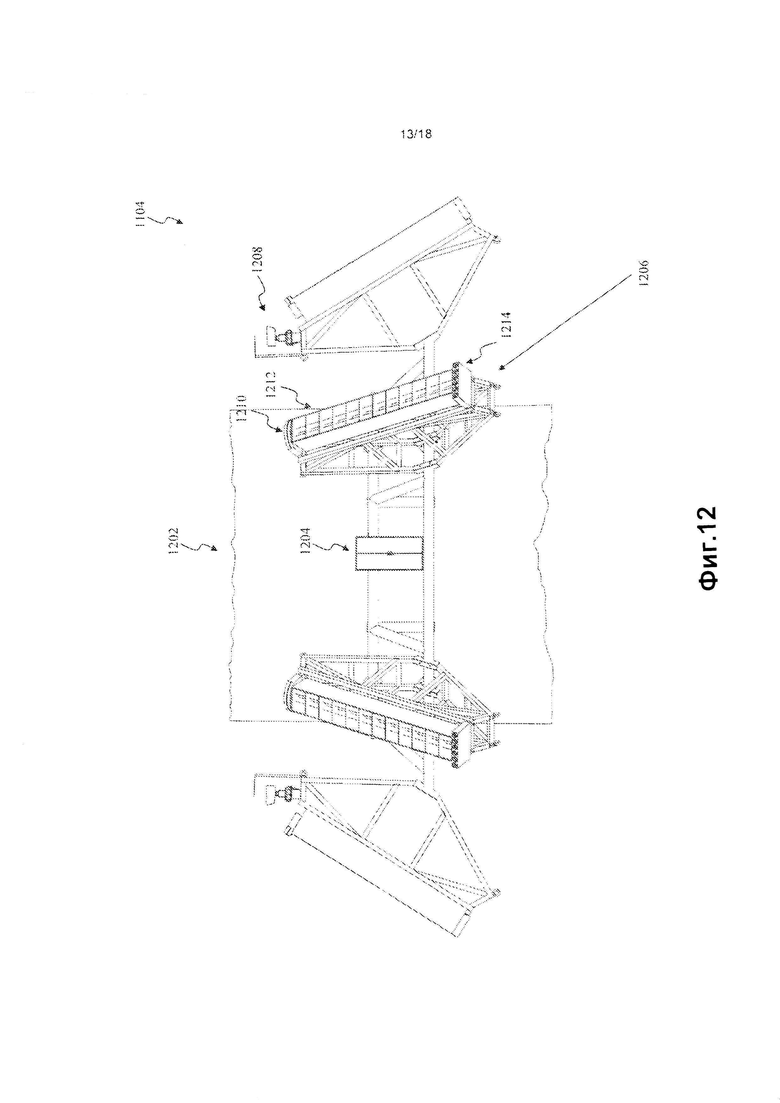
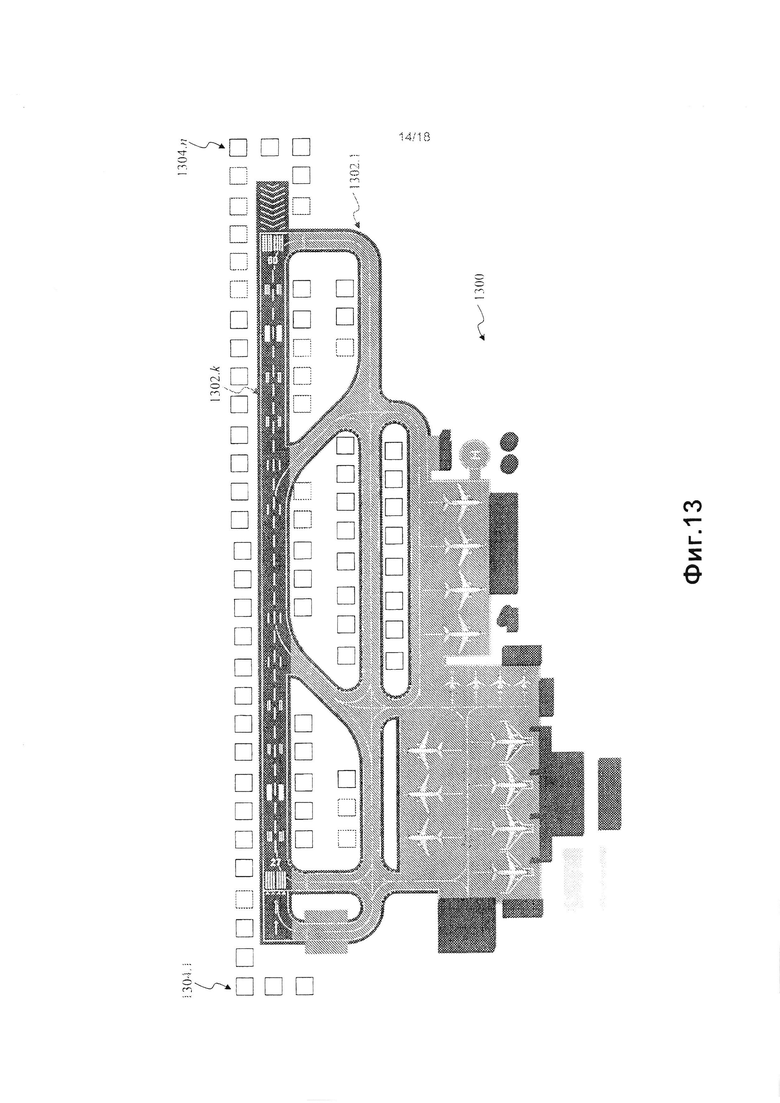
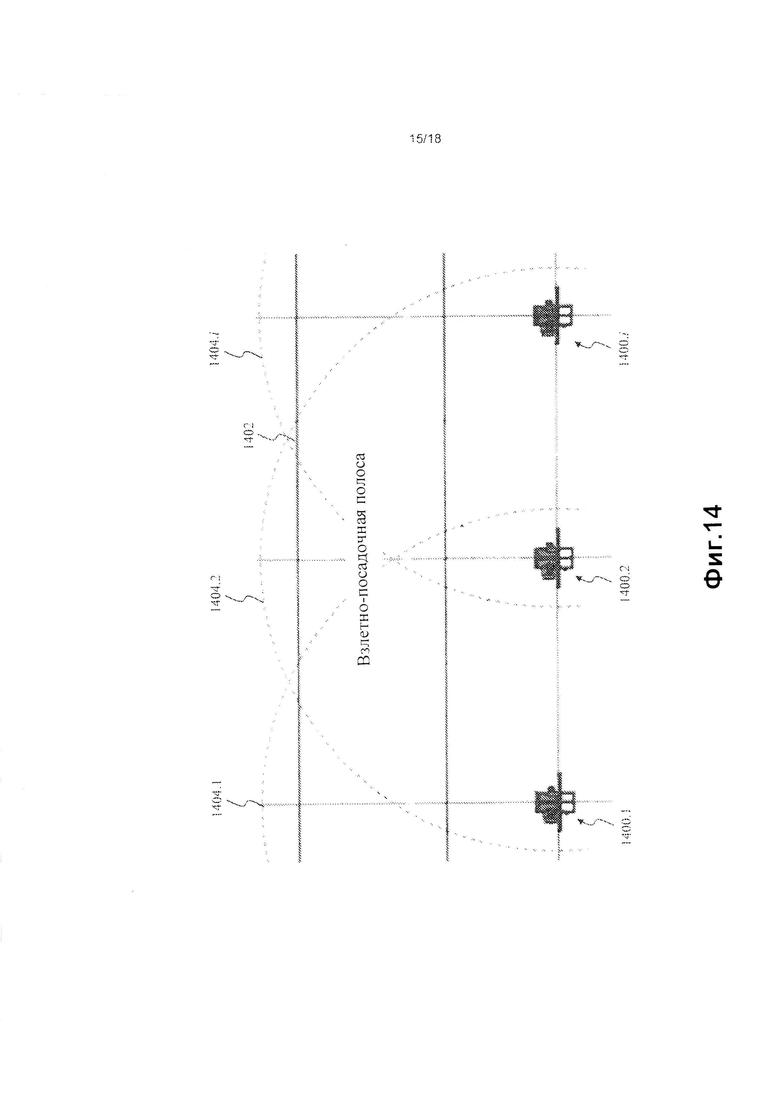
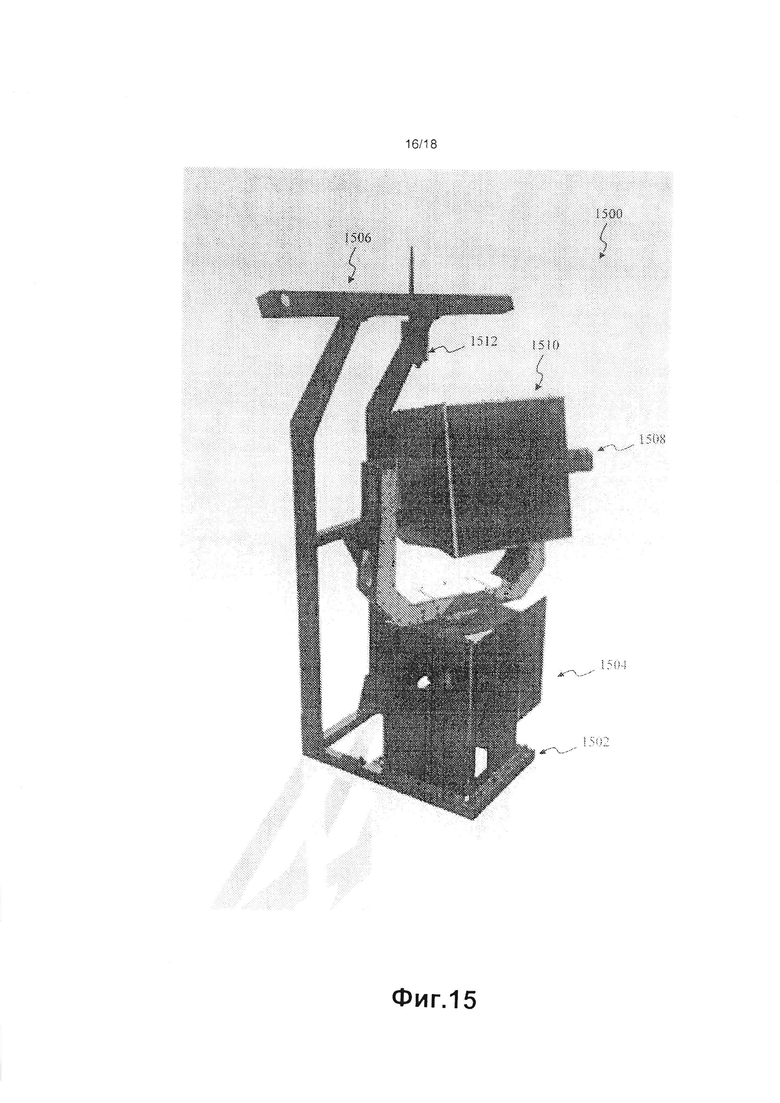
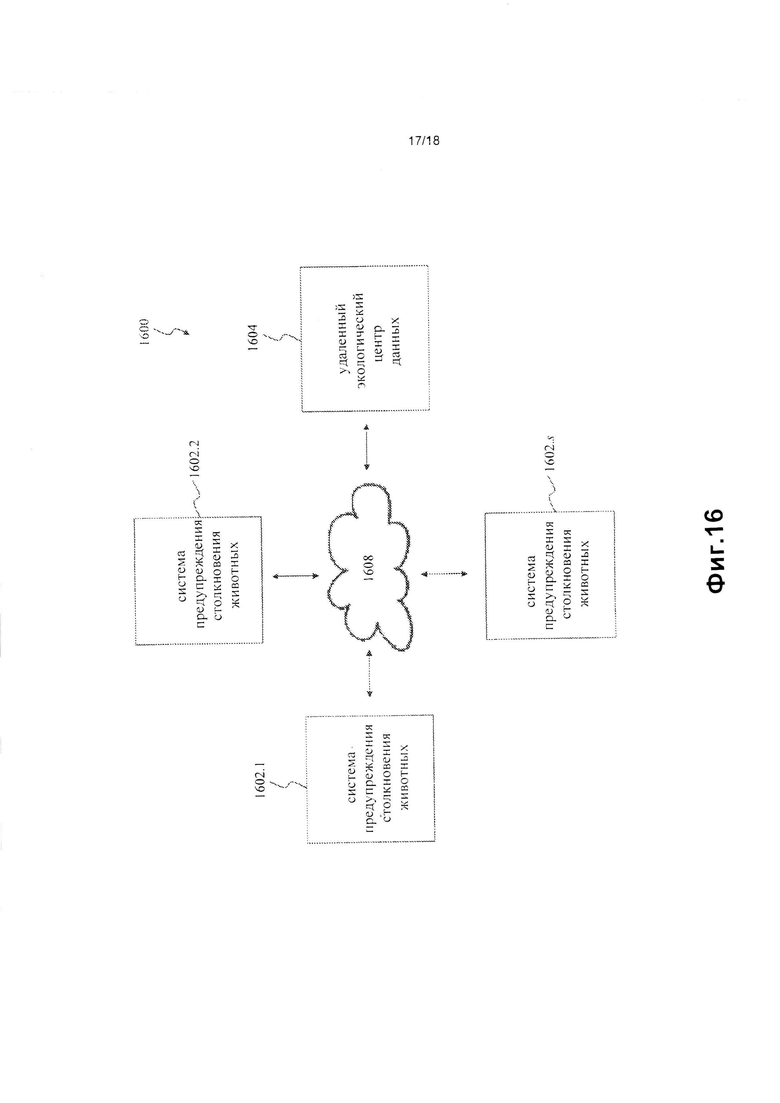
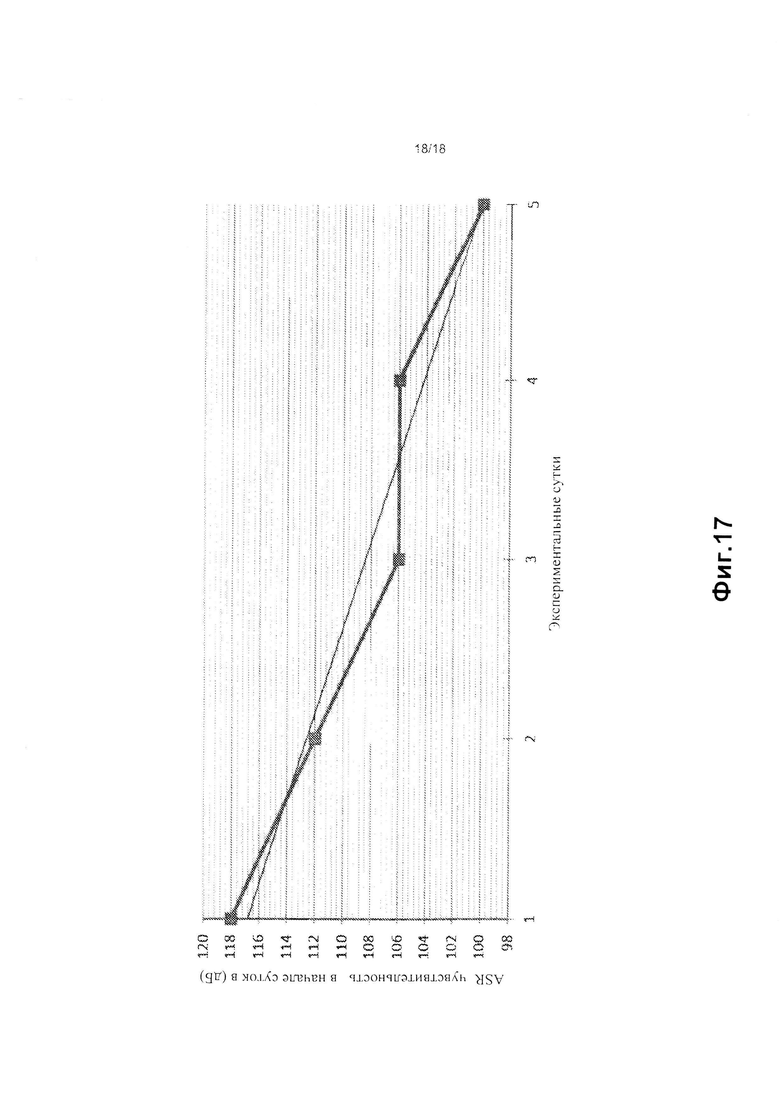
Группа изобретений относится к области акустического воздействия на животных и может применяться для отпугивания птиц от воздушных турбин ветровых электростанций или взлетно-посадочных полос аэропортов. Система предотвращения столкновения животных включает модуль обнаружения и модуль сдерживания. Модуль обнаружения выполнен с возможностью обнаружения объекта и распознавания его таксономического ранга. Модуль сдерживания выполнен с возможностью генерирования акустического сигнала. Акустический сигнал способен вызывать у объекта воздействия акустический устрашающий рефлекс. Обеспечивается возможность отклонения траектории перемещения животных и удержания животных на расстоянии от нежелательных и опасных зон. 4 н. и 21 з.п. ф-лы, 1 табл., 18 ил.
1. Воздушная турбина в ветровой электростанции, включающая:
множество лопастей, выполненных с возможностью преобразования кинетической энергии от ветра в механическую энергию, которая используется для производства электричества; и
систему предотвращения столкновения животных, выполненную, чтобы с помощью средств электроники произвести генерируемый средствами электроники акустический зондирующий сигнал, после распознание птицы, чтобы вызвать акустический устрашающий рефлекс (ASR) у птицы для удержания птицы от ветровой электростанции или отклонения траектории птицы от ветровой электростанции.
2. Воздушная турбина по п. 1, в которой система предотвращения столкновения животных включает:
модуль обнаружения, выполненный с возможностью зондирования области его видимости в пределах ветровой электростанции, чтобы обнаружить присутствие объекта и распознать объект в пределах области его видимости как являющийся птицей.
3. Воздушная турбина по п. 2, в которой модуль обнаружения далее выполнен с возможностью распознать птицу, когда параметр движения или характеристика объекта по существу подобны известному параметру движения, соответствующему птице, или известной характеристике, соответствующей птице.
4. Воздушная турбина по п. 1, в которой система предотвращения столкновения животных включает:
модуль сдерживания, выполненный с возможностью обеспечения генерируемого средствами электроники акустического зондирующего сигнала, при этом генерируемый средствами электроники акустический зондирующий сигнал включает:
искусственный сигнал зондирования, формируемый, чтобы иметь достаточное время нарастания от первого уровня мощности до второго уровня мощности для возбуждения ASR у птицы.
5. Воздушная турбина по п. 4, в которой модуль сдерживания далее выполнен с возможностью обеспечения последовательного повторения искусственного сигнала зондирования с интервалом тишины между повторениями как генерируемого средствами электроники акустического зондирующего сигнала для возбуждения ASR у птицы.
6. Воздушная турбина по п. 4, в которой генерируемый средствами электроники акустический зондирующий сигнал далее включает:
множество генерируемых средствами электроники звуков модуляции, в которой модуль сдерживания далее выполнен с возможностью последовательной подачи искусственного сигнала зондирования и множества генерируемых средствами электроники звуков модуляции для обеспечения генерируемого средствами электроники акустического зондирующего сигнала для усиления ASR у птицы через побуждение модуляции вниманием или модуляции эмоцией.
7. Воздушная турбина по п. 1, в которой система предотвращения столкновения животных далее выполнена с возможностью производить генерируемый средствами электроники звуковой сигнал после распознания летучей мыши, чтобы удержать летучую мышь от вхождения в зону, ближнюю к воздушной турбине, или отклонить траекторию летучей мыши от зоны.
8. Воздушная турбина по п. 7, в которой генерируемый средствами электроники звуковой сигнал характеризуется как находящийся в пределах первого частотного диапазона от приблизительно 4 кГц до приблизительно 7 кГц или второго частотного диапазона от приблизительно 22 кГц до приблизительно 24 кГц.
9. Система предотвращения столкновения животных и птиц с самолетами на аэродроме, включающая:
- первую группу, состоящую из множества модулей обнаружения, выполненных с возможностью непрерывного сканирования собственной зоны обзора в пределах аэродрома для обнаружения наличия объекта и распознавания объекта, например, птицу в зоне обзора; и
- вторую группу, состоящую из множества модулей сдерживания, выполненных с возможностью электронной генерации направленных звуковых сигналов в случае распознавания птицы для вызова ASR у птицы для того, чтобы отклонить ее от взлетно-посадочной полосы аэродрома или изменить траекторию птицы в сторону от взлетно-посадочной полосы.
10. Система по п. 9, в которой первая группа модулей расположена как можно ближе к взлетно-посадочной полосе и выполнена с возможностью работать синхронно с второй группой модулей, чтобы удержать птицу от попадания на восходящие и/или нисходящие траектории самолета при посадке и/или взлете с аэродрома.
11. Система по п. 10, в которой модули обнаружения дополнительно выполнены с возможностью определения параметров движения и местоположения птицы на момент ее распознавания, а модули сдерживания дополнительно выполнены с возможностью выдавать звуковой сигнал с учетом компенсации движения объекта в зависимости от направления движения объекта и в соответствии с траекторией и местоположением объекта.
12. Система по п. 9, в которой электронно-генерированные направленные акустические сигналы различных модулей перекрываются между собой.
13. Система по п. 9, в которой генерированный акустический сигнал выбирается из множества электронно-генерированных акустических сигналов, специфических для различных таксономических отрядов птиц, где:
- модуль обнаружения выполнен с возможностью дополнительно распознавать таксономический отряд птицы, а
- модуль сдерживания настроен выделять электронно-генерированный акустический сигнал из множества электронно-генерированных акустических сигналов, который соответствует таксономическому отряду птицы.
14. Система по п. 9, в которой множество групп модулей установлены на многочисленных наземных опорных основаниях вблизи взлетно-посадочной полосы.
15. Сеть систем предотвращения столкновения животных, включающая:
множество систем предотвращения столкновения животных, выполненных с возможностью формировать генерируемый средствами электроники сдерживающий сигнал после распознания объекта в пределах окружающей среды, чтобы удержать объект от окружающей среды или отклонить траекторию объекта от окружающей среды; и
удаленный Экологический Центр Данных, коммуникативно соединенный с множеством систем предотвращения столкновения животных через систему связи, выполненную с возможностью управлять действием множества систем предотвращения столкновения животных.
16. Сеть систем предотвращения столкновения животных по п. 15, в которой система предотвращения столкновения животных из множества систем предотвращения столкновения животных выполнена с возможностью обеспечивать изображение, видео или аудио объекта в пределах области видения системы предотвращения столкновения животных для удаленного Экологического Центра Данных, когда система предотвращения столкновения животных не способна распознать объект, и
в которой удаленный Экологический Центр Данных выполнен с возможностью анализировать изображение, видео или аудио для распознания объекта и обеспечения обновления системы предотвращения столкновения животных, чтобы дать возможность системе предотвращения столкновения животных распознать объект в будущем.
17. Сеть систем предотвращения столкновения животных по п. 15, в которой генерируемый средствами электроники сдерживающий сигнал включает:
генерируемый средствами электроники акустический зондирующий сигнал, формируемый, чтобы вызвать акустический устрашающий рефлекс (ASR) у объекта;
генерируемый средствами электроники световой сигнал, формируемый, чтобы по существу оградить зону в пределах окружающей среды для удержания объекта от вступления в зону и/или отклонения траектории объекта от зоны; или
генерируемый средствами электроники звуковой сигнал, формируемый, чтобы по существу оградить зону в пределах окружающей среды для удержания объекта от вступления в зону и/или отклонения траектории объекта от зоны.
18. Сеть систем предотвращения столкновения животных по п. 15, в которой генерируемый средствами электроники сдерживающий сигнал выбран из числа множества генерируемых средствами электроники сдерживающих сигналов, при этом множество генерируемого средствами электроники отпугивающего сигнала специфично приспособлено к различным объектам, и
в которой удаленный Экологический Центр Данных выполнен с возможностью дистанционно обновлять множество генерируемых средствами электроники сдерживающих сигналов.
19. Сеть систем предотвращения столкновения животных по п. 15, в которой множество систем предотвращения столкновения животных выполнено с возможностью распознания таксономического ранга объекта и выбора генерируемого средствами электроники сдерживающего сигнала, соответствующего таксономическому рангу объекта из множества генерируемых средствами электроники сдерживающих сигналов, при этом множество генерируемых средствами электроники акустических зондирующих сигналов специфично приспособлено к различным таксономическим рангам.
20. Система предотвращения столкновения животных, включающая:
модуль обнаружения, выполненный с возможностью обнаруживать присутствие объекта в пределах окружающей среды и распознавать таксономический ранг объекта; и
модуль сдерживания, выполненный с возможностью производить генерируемый средствами электроники акустический зондирующий сигнал после распознания таксономического ранга, чтобы вызвать акустический устрашающий рефлекс (ASR) у объекта для удержания объекта от вхождения в окружающую среду.
21. Система предотвращения столкновения животных по п. 20, в которой модуль обнаружения далее выполнен с возможностью распознавать таксономический ранг, когда параметр движения или характеристика объекта по существу подобны известному параметру движения или известной характеристике, которая соответствует таксономическому рангу.
22. Система предотвращения столкновения животных по п. 21, в которой известный параметр движения или известная характеристика выбраны из множества параметров движения и множества характеристик соответственно, при этом множество параметров движения и множество характеристик сохранено в множестве баз данных,
в которой первая база данных из числа множества баз данных сформирована, чтобы включать информацию о множестве возможных типов таксономических рангов, которые могут быть обнаружены в пределах окружающей среды, и
в которой вторая база данных из числа множества баз данных сформирована, чтобы включать множество параметров движения и множество характеристик множества возможных типов таксономических рангов, которые могут быть обнаружены в пределах окружающей среды.
23. Система предотвращения столкновения животных по п. 20, в которой генерируемый средствами электроники акустический зондирующий сигнал включает:
искусственный сигнал зондирования, сформированный чтобы иметь достаточное время нарастания от первого уровня мощности до второй мощности для возбуждения ASR таксономического ранга.
24. Система предотвращения столкновения животных по п. 20, в которой модуль сдерживания далее выполнен с возможностью обеспечить последовательное повторение искусственного сигнала зондирования с интервалом тишины между повторениями, когда генерируемый средствами электроники акустический зондирующий сигнал вызывает ASR таксономического ранга.
25. Система предотвращения столкновения животных по п. 20, в которой генерируемый средствами электроники акустический зондирующий сигнал сформирован, чтобы по существу не влиять на уровень стресса или состояние таксономического ранга.
| US 5774088 A, 30.06.1998 | |||
| ВЫСОКОГЛИНОЗЕМИСТОЕ ВЯЖУЩЕЕ | 2005 |
|
RU2284971C1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |

