Изобретение относится к области амфибийного транспорта и может использоваться для решения задач, связанных с повышением безопасности взлетно-посадочных действий магистральных самолетов- амфибий за счет увеличения эффективности многопозиционного радиолокационного мониторинга надводной поверхности акватории летного бассейна гидроаэродрома долговременного базирования. Эффективность мониторинга акватории летного бассейна, в частности, надводной части взлетно-посадочной полосы (ВПП) при облучении с помощью радиолокационных станций (РЛС) как с борта гидросамолета, так и береговых постов достигается за счет размещения активных радиолокационных отражателей (АРЛО) с круговой диаграммой рассеяния в верхней полусфере (как в угломестной, так и азимутальной плоскостях) на плавучих навигационных знаках: маркерных (по два входных, центральных и выходных соответственно - края ВПП), курсовом маяке (ось ВПП), судне на воздушной подушке (СВП) как знаке зоны приводнения, а также береговых постройках гидроаэродрома. АРЛО обеспечивает переизлучение в обратном направлении достигших их сигналов посылки РЛС, которые усилены по мощности и когерентны зондирующему излучению, что увеличивает собственную радиолокационную заметность указанных объектов. В верхней полусфере АРЛО имеет форму выпуклой поверхности вращения второго порядка, образованной необходимым количеством активных модулей, каждый из которых представляет собой двухстороннюю щелевую слабонаправленную антенну трехсантиметрового диапазона длин волн интегрированную с усилителем (см. пат. №645496 РФ, МКИ HОЗB 7/14. Генератор сверхвысоких частот / Волощенко П.Ю., Волощенко Ю.П. (РФ); ТРТИ (РФ). Заявл. 01.03.77; Зарег. 23.08.93; Волощенко П.Ю., Волощенко Ю.П., Малышев В.А. Сверхвысокочастотный усилитель. А.с. 882382 СССР, Заявл. 26.12.79. Зарег. 14.10.1993. Бюл. №42. - 4 с.), причем частоты переизлучения в обратных направлениях усиленных по мощности сигналов для всех используемых АРЛО, различны, что обеспечивает «индивидуальную» радиолокационную распознаваемость на акватории объектов, на которых они размещены, - плавучих навигационных знаков: маркерных (края ВПП), курсового маяка (ось ВПП), СВП (знак зоны приводнения), береговых построек гидроаэродрома. В активных модулях используются негатроны электронные приборы с отрицательным сопротивлением, например, лавинно-пролетные диоды (ЛПД) (см. Негатроника / А.П. Серьезнов, Л.И. Степанова, С.А. Гаряинов, СВ. Гагин, О.П. Негоденко, Н.А. Филинюк, Ф.Д. Касимов. Новосибирск: Наука, Сибирская издательская фирма РАН. 1995. 315 с.). Достигаемое увеличение собственной радиолокационной заметности указанных объектов актуально при выполнении взлетно-посадочных действий в условиях ограниченной видимости: низкая облачность, маскирующее действие гидрометеоров (продукты конденсации водяного пара в атмосфере - дождь, туман, снег, град), ночное время, при возникновении аварийной ситуации на борту СВП и т.д. Многопозиционный мониторинг - радиолокационный и гидроакустический как надводного, так и подводного объема акватории летного бассейна гидроаэродрома позволит береговой службе обеспечения своевременно иметь достаточный объем информации (координаты береговых объектов, плавучих маркерных знаков, курсового маяка и вспомогательного судна на воздушной подушке, параметры переизлучаемых радиосигналов и т.п.) о состоянии взлетно-посадочной полосы (ВПП), на основании которой принимается то ли иное решение, сообщаемое по дополнительному радиоканалу на борт экипажам как судна на воздушной подушке (СВП), так и гидросамолета, готовящего к выполнению взлетно-посадочных операций.
Преимущественная область использования - системы обеспечения безопасной эксплуатации внутренней и шельфовой водной транспортной системы России - естественных и искусственных водоемов: рек, озер, водохранилищ, морского шельфа при нефте- и газодобыче, в частности для обеспечения безопасности взлета и приводнения гидросамолета на акватории летного бассейна гидроаэродрома при осуществлении амфибийной транспортной деятельности.
Известные технологии взлетно-посадочных операций на гидроаэродромах разрабатывались для легкомоторных гидропланов на поплавках. Причем, до настоящего времени контроль чистоты акватории летного бассейна гидроаэродрома от опасных для приводнения предметов (наличие плавсредств, льдин и т.п. на акватории гидроаэродрома) включает в себя только визуальный осмотр с борта гидроплана перед приводнением, что значительно снижает безопасность взлетно-посадочных действий или приводит к их отмене в условиях ограниченной видимости, в ночное время и т.д.
В качестве первого аналога выбран способ, включающий операции определения положения ВПП по направлению ветра и установку плавучих маркерных знаков на открытых морских акваториях (см. «Инженерно-авиационная служба и эксплуатация летательных аппаратов», Н.Н. Андреев и др., М.: изд-во ВВИА им. Жуковского Н.Е., 1970, с.276-280), в котором однако не предусмотрено применение специальных плавсредств для осуществления осмотра, очистки и мелководной части акватории. В способе не осуществляется как гидроакустический осмотр подводной части ВПП, так и радиолокационный мониторинг надводной части акватории летного бассейна гидроаэродрома с целью своевременного обнаружения, определения координат и измерения параметров движения, опасных для приводнения и взлета плавающих предметов, например льдин, контроля расположения плавучих маркерных знаков и вспомогательных судов в условиях ограниченной видимости: низкая облачность, маскирующее действие гидрометеоров (продукты конденсации водяного пара в атмосфере - дождь, туман, снег, град), ночное время. Контроль ВВП от опасных для приводнения и взлета предметов (плавающих и притопленных) включает в себя лишь визуальный осмотр надводной части акватории, по результатам которого принимается решение о ее удовлетворительном навигационном состоянии, что значительно снижает безопасность взлетно-посадочных действий или приводит к их отмене в условиях ограниченной видимости. В аналоге осмотр акватории производится визуально с буксира, осадка которого не позволяет производить данные работы на мелководье, в результате чего данный способ не обеспечивает должный уровень безопасности при маневрах гидросамолета как в водоизмещающем, так и глиссирующем режимах на акватории летного бассейна гидроаэродрома.
Причиной, препятствующей достижению заявляемого технического результата, является отсутствие мониторинга акватории летного бассейна гидроаэродрома как гидроакустического (подводный объем ВПП), так и радиолокационного (надводный объем ВПП) с целью оперативного получения необходимой информации о ее удовлетворительном навигационном состоянии, что значительно снижает безопасность взлетно-посадочных операций, а иногда приводит и к невозможности их осуществления в условиях ограниченной видимости: низкая облачность, маскирующее действие гидрометеоров (продукты конденсации водяного пара в атмосфере - дождь, туман, снег, град), ночное время и т.д.
Признаки, совпадающие с заявляемым способом: определение положения ВВП по направлению ветра, установка плавучих маркерных знаков на акватории, проведение визуального осмотра водной поверхности.
В качестве второго аналога выбран способ подготовки гидроаэродромов для выполнения взлета и посадки гидросамолетов (см. патент РФ №2093428, кл. B64F 1/00, опубл. 20.10.1997), заключающийся в том, что в пределах летного бассейна гидроаэродрома определяют по направлению ветра положение ВПП, устанавливают плавучие маркерные знаки (входные, центральные и выходные) и курсовой маяк, производят осмотр и очистку пути перемещения гидросамолета от посторонних предметов, выбор расположения ВПП производят из условия минимальности имеющейся на акватории ветровой волны, причем установку плавучих маркерных знаков, курсового маяка, осмотр и очистку пути перемещения гидросамолета выполняют посредством использования специального плавсредства - судна на воздушной подушке (СВП). В аналоге использование СВП позволяет провести значительный набор действий: 1) проход от места стоянки впереди гидросамолета до точки его взлета, а также до места стоянки после его посадки; 2) швартовка или отшвартовка гидросамолета после его приводнения или перед взлетом; 3) буксировка гидросамолета по акватории; 4) обеспечение приводнения гидросамолета в условиях плохой видимости за счет размещения и использования глиссадных и курсовых радиомаяков для излучения и приема радиосигналов; 5) осмотр пути перемещения гидросамолета по акватории с помощью гидролокатора и радиолокатора, размещенных на СВП, т.е. наряду с «традиционным» визуальным осмотром для обеспечения безопасности маневрирования и исключения столкновений предложено косвенным образом, т.е. с помощью соответствующих приборов обнаруживать, измерять координаты и параметры движения объектов как в подводной, так и надводной частях ВПП, используя импульсный метод определения дистанции и амплитудный метод пеленгования.
Однако используемая аппаратура активной локации - как гидро-, так и радиолокаторы, установленные на СВП, являются однопозиционными системами определения местоположения как подводных, так и надводных объектов, в связи с чем жесткие требования предъявляются к остроте направленного действия и уровню бокового поля антенн обоих устройств. Следует учесть, что и схема импульсного измерения расстояния до цели, и определение направления на цель путем поворота основного лепестка характеристики направленности антенны в плоскости пеленгования предполагает проведение измерений в безграничной среде, в то время как необходимо достоверно обнаруживать объекты расположенные вблизи протяженной границы раздела «вода-воздух» обследуемого как подводного, так и надводного объема ВПП, что обусловит появление маскирующих отражений и индикацию «ложных» целей на дисплеях, в результате чего операция аналога - эхопоиск «опасных» объектов с борта СВП в обоих средах - будет малоэффективной.
В воздушной среде маскирующее действие поверхностных распределенных целей, уменьшающее вероятность обнаружения объекта, заключается в образовании помех в результате отражений электромагнитных (ЭМ) воли от поверхности моря, а также от неоднородностей в атмосфере. При достаточно большой интенсивности такие помехи могут значительно снизить эффективность работы радиолокационных станций (РЛС) или даже полностью исключить возможность ее результативной работы. Сигнал от поверхностной цели создает на экране РЛС интенсивную светящуюся отметку (фон), который мешает наблюдать находящиеся в пределах этой поверхности точечные цели: корабли, маяки, бакены и т.д. Надводная или наземная цель (например, створы или маяк) может быть обнаружена оператором только в том случае, если ее сигнал выделен из отметок, созданных маскирующими отражениями от окружающего цель фона. Опытные данные показывают, что на индикаторе кругового обзора можно выделить отметку от отражающей площадки, на которой размещена точечная цель, из соседних с пей отражающих площадок, не имеющих точечных целей, только тогда, когда коэффициент контрастности K=(σпц+σц)/σпц станет больше 1,3, где σц, σпц - эффективные поверхности рассеяния точечной и поверхностной целей. Для улучшения наблюдаемости точечных целей необходимо уменьшать σпц, что можно достичь, сужая ширину основного лепестка в диаграммы направленности антенны в горизонтальной плоскости и уменьшая длительность импульса τ. (см. Противолокационная маскировка. Ю.Г. Степанов. - М.: Сов. радио, 1968, с.68-71).
В водной среде причины низкой эффективности поиска с борта надводного плавательного средства в специфических условиях мелководья анализируются из опыта применения эхотрала-гидролокатора для обнаружения подводных препятствий, определения их координат в условиях мелководья на дистанциях до 50 метров, который используется для траления с борта надводного судна с целью проверки чистоты судовых ходов и выявления на них опасных для судоходства подводных объектов (см. Гидролокаторы ближнего действия. А.Н. Яковлев, Г.П. Каблов. Л.: Судостроение, 1983, с.174-178). Возникновение опасных для судоходства подводных объектов связано с естественным процессом изменения русла, а также обусловлено возможностью текущей замусоренности водных путей случайными объектами, например, затонувшими бревнами и т.п. Конструкция пьезоэлектрической интерференционной антенны эхотрала обеспечивала формирование акустического поля со следующими характеристиками:
в вертикальной плоскости - ширина основного лепестка характеристики направленности по уровню 0,7 θ0,7В=2°, первый боковой лепесток в направлениях (±3,5°) от акустической оси с уровнем (- 13,3 дБ), второй боковой лепесток в направлениях (±5,8°) - с уровнем (- 17,8 дБ), третий боковой лепесток в направлениях (±8,2°) - с уровнем (- 21 дБ);
в горизонтальной плоскости - ширина основного лепестка характеристики направленности по уровню 0,7 θ0,7B=7,2°, первый боковой лепесток в направлениях (±12°) от акустической оси с уровнем (- 13,3 дБ), второй боковой лепесток в направлениях (±20°) - с уровнем (- 17,8 дБ), третий боковой лепесток в направлениях (±30°) - с уровнем (- 21 дБ).
При данных параметрах приемно-излучающей антенны закономерны выводы, которые делают сами разработчики: «В условиях ограниченной глубины в русле реки (~4 м) и заглублении излучателя (от 0,5 м до 2,4 м) импульс звука не мог пройти расстояния более 30 м, не испытав отражений от поверхности воды или дна; в некоторых случаях эти отражения вызывали интенсивную помеху на индикаторе. … Незначительная часть звуковых импульсов распространялась с отражением от водной поверхности и от дна на всем протяжении, начиная от самого излучателя. Для устранения реверберационной помехи на индикаторе начало развертки искусственно задерживалось, хотя при этом исключалась возможность обнаружения подводных препятствий в радиусе вокруг вибратора около 3 м. Изображение на экране индикатора препятствия с малыми размерами (эхо от буя) вызывало утроение отметки, обусловленное боковыми лепестками характеристики направленности вибратора».
Далее, следует отметить, что операция аналога - разметка ВПП в пределах летного бассейна гидроаэродрома - посредством установки с борта СВП плавучих навигационных знаков: маркерных (по два входных, центральных и выходных соответственно - края ВПП), курсового маяка (ось ВПП), СВП как знака зоны приводнения, причем ориентация СВП носом против ветра указывает направление последнего (направление захода на ВПП для приводнения или взлета против ветра) эффективна для «традиционного» визуального осмотра надводной части ВПП с борта гидроплана перед приводнением лишь в условиях достаточной атмосферной видимости, что значительно снижает безопасность взлетно-посадочных действий или приводит к их отмене в условиях ограниченной видимости: низкая облачность, маскирующее действия гидрометеоров (продукты конденсации водяного пара в атмосфере - дождь, туман, снег, град), ночное время и т.д. В данных сложных метеоусловиях принятие решения о удовлетворительном навигационном состоянии надводной части ВПП должно быть принято в результате получения необходимой дублирующей информации на основе данных радиолокационного мониторинга надводного объема акватории летного бассейна гидроаэродрома как с борта гидросамолета, так и с береговых постов службы обеспечения. В аналоге не обеспечивается возможность получения необходимой информации о удовлетворительном навигационном состоянии подводного объема ВВП вследствие отсутствия проведения подводного наблюдения с помощью многопозиционной гидроакустической системы ближней локации.
Рассмотрим вопрос обеспечения приводнения гидросамолета в условиях плохой видимости за счет операций аналога - размещение на боргу СВП глиссадного радиомаяка и установку с помощью СВП на самостоятельном плавсредстве курсового маяка. Курсо-глиссадная система, КГС (Instrument Landing System, ILS) - наиболее распространенная в авиации радионавигационная система обеспечения захода на посадку по приборам, состоит из двух радиомаяков - курсового (КРМ) и глиссадного (ГРМ).
Антенная система КРМ представляет собой многоэлементную антенную решетку, состоящую из линейного ряда направленных антенн метрового диапазона с горизонтальной поляризацией. Для расширения рабочего сектора радиомаяка до углов (±35°) часто используется дополнительная антенная решетка. Диапазон рабочих частот КРМ - (108÷112) МГц (используется 40-канальная сетка частот, где каждой частоте КРМ поставлена в соответствие определенная частота ГРМ). Антенная система ГРМ представляет собой решетку из двух разнесенных по высоте направленных антенн дециметрового диапазона с горизонтальной поляризацией (решетка «O»). Диапазон рабочих частот ГРМ (329÷335) МГц. На аэродроме ГРМ размещают со стороны, противоположной участку застройки и рулежным дорожкам, на расстоянии (120-180)м от оси ВПП напротив зоны приземления, но удаленно от порога ВПП, а КРМ размещается за пределами ВПП на продолжении ее осевой линии, причем габариты антенных решеток КРМ и ГРМ должны составить приблизительно: по вертикали до 10 м, а по горизонтали до 200 м соответственно, что приемлемо лишь для «сухопутного» аэродрома, но не для гидроаэродрома.
Причиной, препятствующей достижению заявляемого технического результата, является отсутствие многопозиционного радиолокационного мониторинга надводного объема акватории летного бассейна гидроаэродрома как с борта гидросамолета, так и с береговых постов службы обеспечения, что снижает безопасность проведения взлета и приводнения гидросамолетов в условиях внезапно наступившей ограниченной видимости: низкая облачность, маскирующее действие гидрометеоров (продукты конденсации водяного пара в атмосфере - дождь, туман, снег, град), ночное время и т.д., а также невозможность получения необходимой информации о удовлетворительном навигационном состоянии подводного объема ВВП вследствие отсутствия проведения подводного наблюдения с помощью многопозиционной гидроакустической системы ближней локации.
Признаки, совпадающие с заявляемым способом: определение положения ВВП по направлению ветра, установка плавучих маркерных знаков (входных, центральных и выходных) и курсового маяка на акватории, проведение визуального осмотра водной поверхности, определение по направлению ветра положение ВПП в пределах летного бассейна гидроаэродрома, установка маркерных знаков на акватории с помощью СВП, осмотр и очистка пути перемещения гидросамолета от посторонних предметов с помощью СВП, выбор расположения ВПП из условия минимальности имеющейся на акватории ветровой волны, проход СВП от места стоянки впереди гидросамолета до точки его взлета, а также до места стоянки после его посадки, швартовка или отшвартовка с помощью СВП гидросамолета после его приводнения или перед взлетом, буксировка с помощью СВП гидросамолета по акватории, обеспечение с помощью СВП приводнения гидросамолета в условиях плохой видимости за счет размещения и использования глиссадных и курсовых радиомаяков для излучения и приема радиосигналов, осмотр пути перемещения гидросамолета по акватории с помощью гидролокатора и радиолокатора, размещенных на СВП.
В качестве прототипа выбран «Способ подготовки летного бассейна гидроаэродрома для выполнения взлета и приводнения гидросамолета» (см. патент РФ №2464205, кл. B64F 1/00, опубл. 20.10.2012 г., Бюл. №29), заключающийся в том, что в пределах летного бассейна гидроаэродрома определяют положение ВПП как с учетом направления ветра, так и из условия минимальности имеющейся на акватории ветровой волны, экипаж СВП производит разметку ВПП посредством установки плавучих навигационных знаков: маркерных (по два входных, центральных и выходных соответственно - края ВПП), курсового маяка (ось ВПП), СВП как знака зоны приводнения, причем ориентация СВП носом против ветра указывает направление последнего (направление захода на ВПП для приводнения или взлета), в процессе чего визуально, а также с помощью радиолокатора и гидролокатора осматривает путь перемещения гидросамолета по акватории, осуществляет швартовку, отшвартовку и буксировку гидросамолета после его приводнения или перед взлетом, а также на борту СВП размещает глиссадные и курсовые радиомаяки для посылки и приема радиосигналов, обеспечивающих приводнение гидросамолета в условиях плохой видимости. Причем, заблаговременно, в процессе подготовки летного бассейна экипаж судна на воздушной подушке размещает на дне акватории вдоль осей четырех радиальных (сдвинуты относительно друг друга на 45°) ВПП приемоизлучающие антенные устройства полусферической формы, обеспечивающие квантованный как по направлению, так и по «частотной окраске» ультразвуковой эхопоиск объектов в водном объеме в режимах кругового или секторного обзора как в азимутальной, так и угломестной плоскостях. Донные приемоизлучающие антенные устройства соединены кабелем с аппаратурой береговой гидроакустической службы гидроаэродрома, обеспечивающей формирование зондирующих сигналов возбуждения однотипных преобразователей накачки параметрических антенн, образующих полусферическую апертуру приемоизлучающего антенного устройства, обработку и отображение информации, полученной в широком частотном, но «индивидуальном» для каждого антенного устройства, диапазоне. Операторы береговой гидроакустической службы осуществляют различные виды подводного мониторинга: ультразвуковое зондирование водного объема взлетно-посадочной полосы, соответствующей имеющемуся направлению ветра; текущий эхопоиск на периметре летного бассейна гидроаэродрома; режим пассивного наблюдения дальней подводной обстановки в шельфовой зоне, примыкающей к акватории гидроаэродрома, причем перечисленные операции береговая гидроакустическая служба может выполнять на постоянной основе вне зависимости от погодных условий, времени суток и года. Одновременное использование соседних донных антенных устройств полусферической формы дает возможность дистанционного получения информации о состоянии водного объема (глубина, направление и скорость течения водных масс), границы раздела «воздух-вода» (высота, скорость и направление движения ветровых волн, границы раздела «вода-лед» (толщина льда) в различных точках акватории летного бассейна. На основе полученной информации о подводной обстановке на акватории береговая гидроакустическая служба гидроаэродрома, принимает то или иное решение относительно взлетно-посадочных действий, сообщаемое по радиоканалу на борт экипажам как СВП, осуществляющему описанные выше действия, так и гидросамолета, готовящего к выполнению взлетно-посадочных действий.
Однако значительная часть описанных выше действий, которые направлены на повышение безопасности взлетно-посадочных действий на акватории летного бассейна гидроаэродрома, выполняется посредством использования многопозиционной гидроакустической система ближнего подводного наблюдения в водном объеме ВПП, физические характеристики которой (плотность, скорость звука, температура, соленость и т.д.) достаточно изучены, стабильны во времени и не флюктуируют внезапно в значительном диапазоне, что могло бы привести к ее неработоспособности, в то время как состояние воздушной среды гидроаэродрома в гораздо меньшей степени предсказуемо, подвержено внешним суточным, погодным и антропогенным воздействиям, что может привести в условиях внезапно наступившей ограниченной видимости: низкая облачность, маскирующее действие гидрометеоров (продукты конденсации водяного пара в атмосфере - дождь, туман, снег, град), ночное время, при возникновении аварийной ситуации на борту СВП и т.д. к невозможности «традиционного» визуального осмотра навигационного состоянии надводного объема ВВП с борта гидросамолета, сводя к нулю эффективность действий экипажа СВП по подготовке ВПП к взлетно-посадочным действиям, что снижает безопасность их проведения. В данных метеоусловиях принятие решения о удовлетворительном навигационном состоянии надводной части ВПП должно быть принято в результате получения необходимой дублирующей информации на основе данных радиолокационного мониторинга надводного объема акватории летного бассейна гидроаэродрома как с борта гидросамолета, так и с береговых постов службы обеспечения, что может быть затруднено в силу целого ряда рассмотренных ниже причин.
1) В воздушной среде маскирующее действие поверхностных распределенных целей, уменьшающее вероятность обнаружения объекта, заключается в образовании помех в результате отражений электромагнитных волн (ЭМВ) от поверхности моря, береговой полосы, а также от неоднородностей в атмосфере. При достаточно большой интенсивности такие помехи могут значительно снизить эффективность работы PJIC или даже полностью исключить возможность ее применения. Например, маскирующее действие морских волн при обнаружении надводных объектов корабельной РЛС «Дон» (τ=1 мкс, θ=1°; частоту следования импульсов Fп=800 Гц; скорость вращения антенны Ω=15 об/мин; высота h=20 м) определяется следующим образом. Задаются величинами максимальной вероятности правильного обнаружения D=0,9 и вероятностью ложной тревоги 10-5, параметром σy=(-15) дБ (соответствующем высоте волн более 2 м). Рассчитывают: число интегрируемых импульсов n=0,5·θ·10-5/Ω=4 и отношение (PC/PП)ПОР=13 дБ, согласно методике, приведенной в монографии (см. Противолокационная маскировка. Ю.Г. Степанов. - М.: Сов. радио, 1968, с.80). Подставляя все данные в выражение для σЦ, получают величину ЭПР надводной цели σЦ>12 дБ=16 м2. Таким образом, проведенный расчет показывает, что при волнении моря в 4 балла и выше с помощью корабельной РЛС «Дон» с антенной, установленной на высоте 20 м, можно с трудом обнаруживать на фоне отражений от морских волн надводные цели, имеющие эффективную поверхность рассеяния (ЭПР) менее 16 м2: катера, шлюпки, но не плавучие знаки навигационной остановки. Условие обнаружения надводной цели на фоне помех от морских волн состоит в том, что ее ЭПР σц должна быть больше величины, определяемой соотношением (см. Противолокационная маскировка. Ю.Г. Степанов. - М.: Сов. радио, 1968, с.79).
(PC/PП)пор·σy·h·c·τ·θ/2,
где PC, PП - мощности рассеяния сигнала и помехи, σy - эффективная поверхность рассеяния 1 м2 морской поверхности, h - высота установки антенны радиолокатора, c - скорость света, τ - длительность излучаемого импульса, θ - ширина по уровню 0,7 основного лепестка характеристики направленности антенны радиолокатора.
2) Следует отметить, что при обзоре морской поверхности интенсивность отраженных радиолокационных сигналов определяется распределенными целями, имеющими различные отражающие свойства. Современные корабельные РЛС позволяют различать очертания контрастных (по интенсивности радиолокационного отражения) больших объектов (мостов, плотин и т.д.). С помощью радиолокационных отражателей (РЛО) можно улучшить изображение небольших навигационных объектов путем изменения отражающих свойств отдельных участков водной поверхности, а также подчеркнуть контуры береговой черты акваторий. Основная цель, которая при этом преследуется, - увеличение радиолокационной контрастности навигационных объектов на экране РЛС от уровня окружающего их фона за счет изменения ЭПР отдельных участков поверхности, где располагаются такие объекты. В международном договоре об обеспечении безопасности судов (SOLAS) существует требование улучшения радиолокационной распознаваемости водных транспортных средств (ТС) и навигационных знаков, выполняемое в настоящее время за счет установки на них пассивных РЛО (см. Комаров В.М., Заличев Н.Н. Радиолокационные отражатели для систем предупреждения столкновения водных транспортных средств // Зарубежная радиоэлектроника - 1982. - №10. - С.40-52). Так, на характеристики РЛО распространяется действие ряда правил и стандартов, разработанных как национальными, так и международными организациями (Offshore Racing Council, Royal Ocean Racing Club, British Marine Radar Reflector Perfomance Specification, 1977r., ISO 8729, 1987 г., Firdell 1988 International Radar Perfomance Standart), в соответствии с которыми к РЛО, предназначенным для использования в морских условиях, предъявляются следующие специфические требования:
- наличие большой ЭПР (например, в 3 см-диапазоне ЭПР должна быть более 100 м2), позволяющей обнаруживать отражатели даже при сильном (около 5-6 баллов) волнении;
- наличие гладкой и ровной диаграммы ЭПР пассивного РЛО как в азимутальной, так и угломестной плоскостях, позволяющей поддерживать постоянство величины ЭПР отражателя даже в условиях качки;
- установка РЛО на достаточно больших высотах над уровнем моря, позволяющих судовым РЛС обнаруживать отражатели на дальностях 5-6 миль;
- обеспечение заданной отражательной способности при любых изменениях состояния моря, вибрации, влажности, температуры и других воздействующих факторов морской среды;
- малый вес и габариты, простота установки и удобство обслуживания, низкая цена (см. Андреев А.Ю., Леонтьев В.В. Радиолокационные отражатели и безопасность на море // Судостроение за рубежом. - 1991. - №9. - С.40-53).
Результаты натурных испытаний радиолокационной заметности пассивных РЛО - 26-дюймовой линзы Люнеберга (ЛЛ) и блока уголковых отражателей, установленных на морских буях, качественно оценивалась по изображению на экране РЛС. Радиолокатор имеет частоту сигнала (9375±30) МГц, излучаемую импульсную мощность 10 кВт (средняя мощность 0,64 Вт), частоту повторения импульсов 800 Гц, длительность импульса 0,08 мкс, чувствительность приемника - 95дБ, коэффициент усиления антенны 29,4 дБ и высоту установки антенны над уровнем моря 3,1 м. Ширина диаграммы направленности антенны по уровню половинной мощности в двух ортогональных плоскостях составляла 0,8°×15°. Результаты испытаний показали, что радиолокационные отражатели увеличивают максимальную дальность обнаружения буев от 2,0 до 6,0 миль.
3) Одним из новых направлений в технике твердотельных устройств СВЧ-диапазона является разработка активных антенн (АА), объединяющих пассивный излучатель и активное устройство на электронных полупроводниковых приборах в виде одного модуля, осуществляющего прием и передачу радиоволн, усиление, преобразование или генерацию сигналов. Активная антенна (ЛА) представляет собой единое конструктивно целое устройство, в котором излучатель играет роль элемента колебательного контура, подключенного к электронному прибору. В общем случае ЛА - это нелинейная система, которая наряду с характеристиками излучения (диаграмма направленности и коэффициент направленного действия, эффективная площадь и др.) описывается параметрами, учитывающими наличие активного прибора (мощность, потребляемая от источников питания и интенсивность излучения на частотах, динамический диапазон и площадь усиления). К настоящему времени перспективными направлениями использования ЛА являются:
оснащение ими РЛО, применяемых для улучшения распознаваемости на экране РЛС транспортных средств (например, малоразмерных и малотоннажных судов и самолетов), навигационных знаков (буев, бакенов, маяков), аварийных спасательных средств (шлюпок, типов, жилетов), рыболовных сетей и т.д., создание усиливающих приемопередающих или передающих антенн активных радиолокационных отражателей (АРЛО) позволяет, в сравнении с пассивными РЛО, за счет изменения параметров полупроводникового прибора, регулировать характеристики отражателей: увеличить эффективную поверхность рассеяния, модулировать отраженный сигнал, расширить рабочую полосу частот, уменьшить вес и габариты;
установка в РЛО, изменяющих отраженный от подвижного или стационарного объекта сигнал с целью затруднения идентификации, либо обнаружения объекта (например, уменьшение радиолокационной контрастности объекта до уровня окружающего фона или создание на экране радиолокаторов искусственной «ложной» ц ели с интенсивностью отраженного сигнала превышающей сигнал от реального объекта);
размещение их в бортовых навигационных и связных системах летательных аппаратов, в радиосистемах мобильных объектов, подвергающихся механическим внешним воздействиям; использование АА, позволяет уменьшить массу и габаритные размеры излучателей подвижных объектов, сохранить механическую прочность конструкции корпуса и уменьшить аэродинамическое сопротивление аппарата.
4) Практически прямолинейное распространение ультракоротких волн, применяемых в радиолокации, ограничивает действие навигационных PJIC видимым горизонтом, причем рельеф местности, наличие «затеняющих» протяженных объектов и т.п. не позволяет обнаружить цели, находящиеся в поле невидимости, т.е. в образующейся области радиотени. Таким образом, имея данные о расположении маяков, створных знаков на местности, можно подсчитать границы их зоны обнаружения по известной формуле (см. Противолокационная маскировка. Ю.Г. Степанов. - М.: Сов. радио, 1968, с.74)

где r - дальность прямой видимости, км; h, H - высоты антенны РЛС и объекта соответственно, м.
Расположение навигационных объектов за пределами этой зоны не может быть обнаружено корабельными РЛС, какие бы тактико-технические данные они не имели. В условиях прибрежного гидроаэродрома актуально получение дублирующей информации за счет многопозиционного радиолокационного мониторинга посредством высокорасположенных антенн РЛС как с борта гидросамолета, так и с береговых постов службы обеспечения о удовлетворительности навигационного состояния надводного объема ВПК, размеченной плавучих навигационными знаками: маркерными (по два входных, центральных и выходных соответственно - края ВПП), курсовым маяком (ось ВПП) и самим СВП как знаком зоны приводнения, которые для повышения безопасности взлетно-посадочных действий магистральных самолетов- амфибий должны быть оборудованы активными средствами увеличения собственной радиолокационной заметности.
5) Если не принимать во внимание атмосферное поглощение электромагнитной (ЭМ) энергии, отражение от моря и другие ограничивающие факторы, то для свободного пространства максимальная дальность действия радиолокатора определяется формулой 
6) Возвращаясь к обеспечению приводнения гидросамолета в условиях плохой видимости за счет операций аналога - размещение на борту СВП глиссадного радиомаяка и установка с помощью СВП на самостоятельном плавсредстве курсового маяка, следует отметить, что кроме недопустимо больших габаритов антенных систем для морских условий, осложнения возникнут при функционировании глиссадного радиомаяка (ГРМ). Его антенная система должна сформировать в пространстве одновременно две диаграммы излучения. Первая диаграмма имеет в угломестной плоскости одни широкий лепесток, направленный вдоль плоскости глиссады, в котором несущая частота промодулирована по амплитуде сигналом суммы частот 90 Гц и 150 Гц. Вторая диаграмма имеет в той же плоскости два узких противофазных лепестка выше и ниже от плоскости глиссады, в которых радиочастота промодулирована по амплитуде сигналом разности частот 90 Гц и 150 Гц, а несущая подавлена. В результате сложения сигнал распределяется в пространстве таким образом, что при полете вдоль плоскости глиссады глубина модуляции сигналов 90 Гц и 150 Гц одинакова, а значит разность глубин модуляции (РГМ) равна нулю. При отклонении от плоскости глиссады глубина модуляции сигнала одной частоты растет, а другой - падает, следовательно, РГМ увеличивается в положительную или отрицательную сторону. При этом сумма глубин модуляции (СГМ) в зоне действия маяка поддерживается на постоянном уровне. Бортовое пилотажно-навигационное оборудование воздушного судна измеряет величину РГМ, определяя направление и угол отклонения от плоскости глиссады. Пересечение плоскости курса и плоскости глиссады дает линию глиссады. В «сухопутном» варианте диаграмма направленности антенной системы ГРМ формируется в результате отражения радиоволн от поверхности земли, поэтому к чистоте зон, непосредственно прилегающих к антенной системе ГРМ, предъявляются особые требования. Чтобы уменьшить влияние неровностей подстилающей поверхности на диаграмму направленности, а следовательно, и искривление линии глиссады, используется антенная решетка из 3-х вертикально разнесенных антенн (решетка «М»), обеспечивающая пониженную мощность излучения под малыми углами к горизонту, тем не менее из-за неровностей рельефа местности и препятствий в зоне действия КРМ и ГРМ реальная линия глиссады подвержена искривлениям, величина которых нормируются для каждой категории системы посадки. В «морском» варианте на формирование диаграммы направленности антенной системы ГРМ будет оказывать взволнованная морская поверхность, удельная эффективная поверхность рассеяния (ЭПР) σy которой зависит от угла наклона лучей антенны, длины волны и поляризации облучения, состояния моря и силы ветра (см. Противолокационная маскировка. Ю.Г. Степанов, - М: Сов. радио, 1968, с.79), что приведет к существенным искажениям диаграмм направленности именно в угломестной (вертикальной) плоскости, нарушая работоспособность описанного выше устройства.
Причиной, препятствующей достижению заявляемого технического результата, является отсутствие эффективности осуществления радиолокационного мониторинга надводного объема ВПП с борта судна на воздушной подушке (СВП), на основе которого делается вывод о удовлетворительности ее навигационного состояния, что снижает безопасность проведения взлетно-посадочных действий в условиях внезапно насупившей ограниченной видимости: низкая облачность, маскирующее действие гидрометеоров (продукты конденсации водяного пара в атмосфере - дождь, туман, снег, град), ночное время, при возникновении аварийной ситуации на борту СВП и т.д., и делает необходимым получение дублирующей информации за счет многопозиционного радиолокационного мониторинга с помощью радиолокационных станций (РЛС) как с борта гидросамолета, так и с береговых постов службы обеспечения, причем как плавучие маркерные знаки (входные, центральные и выходные) и курсовой маяк, так и СВП, а также береговые объекты гидроаэродрома должны быть оборудованы активными средствами увеличения собственной радиолокационной заметности.
Признаки, совпадающие с заявляемым способом: определение положения в пределах летного бассейна гидроаэродрома ВПП как с учетом направления ветра, так и из условия минимальности имеющейся на акватории ветровой волны, экипаж СВП производит разметку ВПП посредством установки плавучих навигационных знаков: маркерных (по два входных, центральных и выходных соответственно - края ВПП), курсового маяка (ось ВПП), СВП как знака зоны приводнения, причем ориентация СВП носом против ветра указывает направление последнего (направление захода на ВПП для приводнения или взлета), в процессе чего визуально, а также с помощью радиолокатора и гидролокатора осматривает путь перемещения гидросамолета по акватории, осуществляет швартовку, отшвартовку и буксировку гидросамолета после его приводнения или перед взлетом, а также на борту СВП размещает глиссадные и курсовые радиомаяки для посылки и приема радиосигналов, обеспечивающих приводнение гидросамолета в условиях плохой видимости, причем заблаговременно, в процессе подготовки летного бассейна экипаж судна на воздушной подушке размещает на дне акватории вдоль осей четырех радиальных (сдвинуты относительно друг друга на 45°) ВПП приемоизлучающие антенные устройства полусферической формы, обеспечивающие квантованный как по направлению, так и по «частотной окраске» ультразвуковой эхопоиск объектов в водном объеме в режимах кругового или секторного обзора как в азимутальной, так и угломестной плоскостях. Донные приемоизлучающие антенные устройства соединены кабелем с аппаратурой береговой гидроакустической службы гидроаэродрома, обеспечивающей формирование зондирующих сигналов возбуждения однотипных преобразователей накачки параметрических антенн, образующих полусферическую апертуру приемоизлучающего антенного устройства, обработку и отображение информации, полученной в широком частотном, но «индивидуальном» для каждого антенного устройства, диапазоне. Операторы береговой гидроакустической службы осуществляют различные виды подводного мониторинга: ультразвуковое зондирование водного объема взлетно-посадочной полосы, соответствующей имеющемуся направлению ветра; текущий эхопоиск на периметре летного бассейна гидроаэродрома; режим пассивного наблюдения дальней подводной обстановки в шельфовой зоне, примыкающей к акватории гидроаэродрома, причем перечисленные операции береговая гидроакустическая служба может выполнять на постоянной основе вне зависимости от погодных условий, времени суток и года. Одновременное использование соседних донных антенных устройств полусферической формы даст возможность дистанционного получения информации о состоянии водного объема (глубина, направление и скорость течения водных масс), границы раздела «воздух-вода» (высота, скорость и направление движения ветровых волн, границы раздела «вода-лед» (толщина льда) в различных точках акватории летного бассейна. На основе полученной информации о подводной обстановке на акватории береговая гидроакустическая служба гидроаэродрома принимает то или иное решение относительно взлетно-посадочных действий, сообщаемое по радиоканалу на борт экипажам как СВП, осуществляющему описанные выше действия, так и гидросамолета, готовящего к выполнению взлетно-посадочных операций.
Задачей изобретения является повышение безопасности взлетно-посадочных действий в условиях внезапно наступившей ограниченной видимости: низкая облачность, маскирующее действие гидрометеоров (продукты конденсации водяного пара в атмосфере - дождь, туман, снег, град), ночное время, при возникновении аварийной ситуации на борту СВП и т.д.
Задача обеспечивается за счет дополнительного многопозиционного радиолокационного мониторинга надводного объема ВПП на акватории гидроаэродрома, на основе которого делается вывод о удовлетворительности ее навигационного состояния, как с борта гидросамолета, так и с береговых постов службы обеспечения, причем как плавучие навигационные знаки: маркерные (по два входных, центральных и выходных соответственно - края ВПП), курсовом маяке (ось ВПП), СВП как знак зоны приводнения, определяющих ее заданные параметры, а также береговые постройки должны быть для увеличения собственной радиолокационной заметности оборудованы РЛО с активными модулями на негатронах - твердотельных устройствах с лавинно-пролетными диодами (ЛПД) (см. пат. №645496 РФ, МКИ H03B 7/14. Генератор сверхвысоких частот / Волощенко П.Ю., Волощенко Ю.П. (РФ); ТРТИ (РФ), Заявл. 01.03.77; Зарег. 23.08.93; Волощенко П.Ю. Исследование модуляции рассеянного поля отражателя с рупорной антенной на лавинно-пролетном диоде. Радиотехника и электроника. 1999, т.44. №4, с.482-484), которые обеспечивают направленное переизлучение в обратном направлении достигших их сигналов посылки, которые усилены по мощности и когерентны зондирующему излучению.
Технический результат изобретения заключается в получении уточненной информации о навигационном состоянии летного бассейна гидроаэродрома, и в частности, надводного объема ВПП, за счет многопозиционного радиолокационного мониторинга как с борта гидросамолета, так и с берегового поста службы обеспечения, что повышает безопасность взлетно-посадочных действий на мелководной акватории.
Технический результат достигается тем, что в способ подготовки летного бассейна гидроаэродрома для выполнения взлета и приводнения гидросамолета, заключающийся в том, что пределах летного бассейна гидроаэродрома определяют положение ВПП как с учетом направления ветра, так и из условия минимальности имеющейся на акватории ветровой волны, экипаж СВП производит разметку ВПП посредством установки плавучих навигационных знаков: маркерных (по два входных, центральных и выходных соответственно - края ВПП), курсового маяка (ось ВПП), СВП как знака зоны приводнения, причем ориентация СВП носом против ветра указывает направление последнего (направление захода на ВПП для приводнения или взлета), в процессе чего визуально, а также с помощью радиолокатора и гидролокатора осматривает путь перемещения гидросамолета по акватории, осуществляет швартовку, отшвартовку и буксировку гидросамолета после его приводнения или перед взлетом, а также на борту СВП размещает глиссадные и курсовые радиомаяки для посылки и приема радиосигналов, обеспечивающих приводнение гидросамолета в условиях плохой видимости. Причем, заблаговременно, в процессе подготовки летного бассейна экипаж судна на воздушной подушке размещает на дне акватории вдоль осей четырех радиальных (сдвинуты относительно друг друга на 45°) ВПП приемоизлучающие антенные устройства полусферической формы, обеспечивающие квантованный как по направлению, так и по «частотной окраске» ультразвуковой эхопоиск объектов в водном объеме в режимах кругового или секторного обзора как в азимутальной, так и угломестной плоскостях; донные приемоизлучающие антенные устройства соединены кабелем с аппаратурой береговой гидроакустической службы гидроаэродрома, обеспечивающей формирование зондирующих сигналов возбуждения однотипных преобразователей накачки параметрических антенн, образующих полусферическую апертуру приемоизлучающего антенного устройства, обработку и отображение информации, полученной в широком частотном, но «индивидуальном» для каждого антенного устройства, диапазоне, а операторы береговой гидроакустической службы осуществляют различные виды подводного мониторинга: ультразвуковое зондирование водного объема взлетно-посадочной полосы, соответствующей имеющемуся направлению ветра; текущий эхопоиск на периметре летного бассейна гидроаэродрома; режим пассивного наблюдения дальней подводной обстановки в шельфовой зоне, примыкающей к акватории гидроаэродрома, причем перечисленные операции береговая гидроакустическая служба может выполнять на постоянной основе вне зависимости от погодных условий, времени суток и года: одновременное использование соседних донных антенных устройств полусферической формы даст возможность дистанционного получения информации о состоянии водного объема (глубина, направление и скорость течения водных масс), границы раздела «воздух-вода» (высота, скорость и направление движения ветровых волн, границы раздела «вода-лед» (толщина льда) в различных точках акватории летного бассейна.; на основе полученной информации о подводной обстановке на акватории береговая гидроакустическая служба гидроаэродрома, принимает то или иное решение относительно взлетно-посадочных действий, сообщаемое по радиоканалу на борт экипажам как СВП, осуществившему описанное выше, так и гидросамолета, готовящегося к выполнению взлетно-посадочных действий, дополнительно введены следующие операции:
размещение на плавучих навигационных знаках: маркерных (но два входных, центральных и выходных соответственно - края ВПП), курсовом маяке (ось ВПП), СВП как знаке зоны приводнения, а также береговых постройках гидроаэродрома, активных радиолокационных отражателей (АРЛО) с круговой диаграммой рассеяния в верхней полусфере (как в угломестной, так и азимутальной плоскостях), что обеспечивает переизлучение в обратном направлении достигших их сигналов посылки РЛС, которые усилены по мощности и когерентны зондирующему излечению, т.е. приводит к увеличению собственной радиолокационной заметности указанных объектов;
в верхней полусфере АРЛО имеет форму выпуклой поверхности вращения второго порядка, образованной необходимым количеством активных модулей, каждый из которых представляет собой двухстороннюю щелевую слабонаправленную антенну трехсантиметрового диапазона длин волн интегрированную с усилителем (см. пат. №645496 РФ, МКИ H03B 7/14. Генератор сверхвысоких частот / Волощенко П.Ю., Волощенко Ю.П. (РФ); ТРТИ (РФ). Заявл. 01.03.77; Зарег. 23.08.93; Волощенко П.Ю., Волощенко Ю.П., Малышев В.А. Сверхвысокочастотный усилитель. А.с. 882382 СССР, Заявл. 26.12.79. Зарег. 14.10.1993. Бюл. №42. - 4 с.), причем частоты переизлучения в обратных направлениях усиленных по мощности сигналов для всех используемых АРЛО, различны, что обеспечивает «индивидуальную» радиолокационную распознаваемость на акватории объектов, на которых они размещены - плавучих навигационных знаков: маркерных (края ВПП), курсового маяка (ось ВПП), СВП (знак зоны приводнения), береговых построек гидроаэродрома;
осуществление как операторами береговой службы обеспечения, так и экипажем гидросамолета многопозиционного радиолокационного мониторинга летного бассейна гидроаэродрома, и в частности, оценка удовлетворительности навигационного состояния надводного объема ВПП по расположению плавучих навигационных знаков: маркерных (по два входных, центральных и выходных соответственно - края ВПП), курсового маяка (ось ВПП), СВП как знака зоны приводнения, причем ориентация СВП носом против ветра указывает его направление, т.е. направление захода на ВПП для приводнения или взлета;
на основе полученной информации о навигационном состоянии надводной поверхности ВВП в условиях ограниченной видимости: низкая облачность, маскирующего действия гидрометеоров (продукты конденсации водяного пара в атмосфере - дождь, туман, снег, град), ночное время, возникновении аварийной ситуации на борту СВП и т.д., береговая служба обеспечения гидроаэродрома принимает то или иное решение относительно взлетно-посадочных действий, сообщаемое по дополнительному радиоканалу на борт экипажам как СВП, осуществляющему описанные выше действия, так и гидросамолета, готовящего к выполнению взлетно-посадочных операций.
На фиг.1 представлены графики зависимости средних уровней сигналов, отраженных от различных морских целей и морских волн, от дальности наблюдения их корабельным радиолокатором; 1 - корабль водоизмещением 10 тыс. тонн, 2 - корабль водоизмещением 1 тыс.тонн, 3 - помехи от морских волн, приходящих с дальности до 9 км, 4 - помехи от морских волн, приходящих с дальности до 7 км, 5 - катер, 6 - буй, 7 - уровень ограничителя;
на фиг.2 представлен усредненный график зависимости медианного значения ЭПР σ(м2) для надводных ТС от их длины(м), где вертикальные отрезки 8, 9, 10 соответствуют диапазонам полученных величин - для бота длиной 4 м с РЛО (уголковый отражатель с ЭПР 4 м2); лодки; трех судов различных длин (см. В.М. Комаров и др. Радиотехнические системы предупреждения столкновений при плавании в прибрежных водах и узких фарватерах // Зарубежная радиоэлектроника. - 1983. - №2. - С.72.);
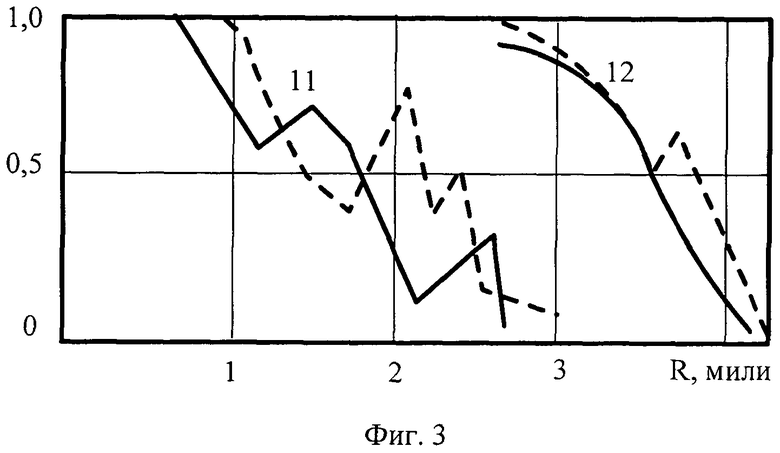
на фиг.3 изображены графики зависимости радиолокационной заметности рыболовецкого бота  кормовой ракурс,
кормовой ракурс,  носовой ракурс) от удаления r (в милях) его местоположения: 11 - без РЛО; 12 - с РЛО (уголковый отражатель с ЭПР 100 м2) (см. В.М. Комаров и др. Радиотехнические системы предупреждения столкновений при плавании в прибрежных водах и узких фарватерах // Зарубежная радиоэлектроника. - 1983. - №2. - С.72);
носовой ракурс) от удаления r (в милях) его местоположения: 11 - без РЛО; 12 - с РЛО (уголковый отражатель с ЭПР 100 м2) (см. В.М. Комаров и др. Радиотехнические системы предупреждения столкновений при плавании в прибрежных водах и узких фарватерах // Зарубежная радиоэлектроника. - 1983. - №2. - С.72);
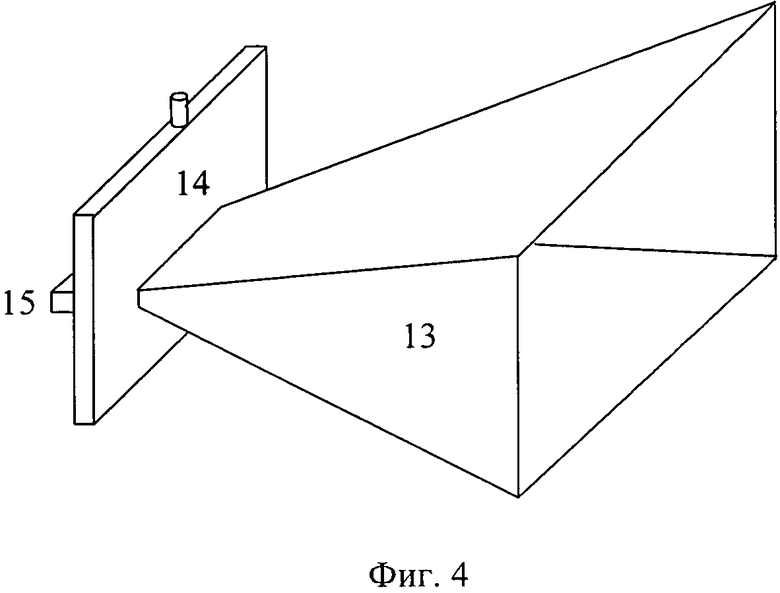
на фиг.4 представлена схема конструкции (см. Волощенко П.Ю. Исследование модуляции рассеянного поля отражателя с рупорной антенной на лавинно-пролетном диоде. Радиотехника и электроника. 1999, т. 44. №4, с. 482-484) разработанного активного модуля (13 - пирамидальная рупорная антенна, 14 - волноводный усилитель на ЛПД (УЛПД) типа 2А709, включенный по схеме «на отражение», 15 - короткозамкнутый (КЗ) отрезок волновода),
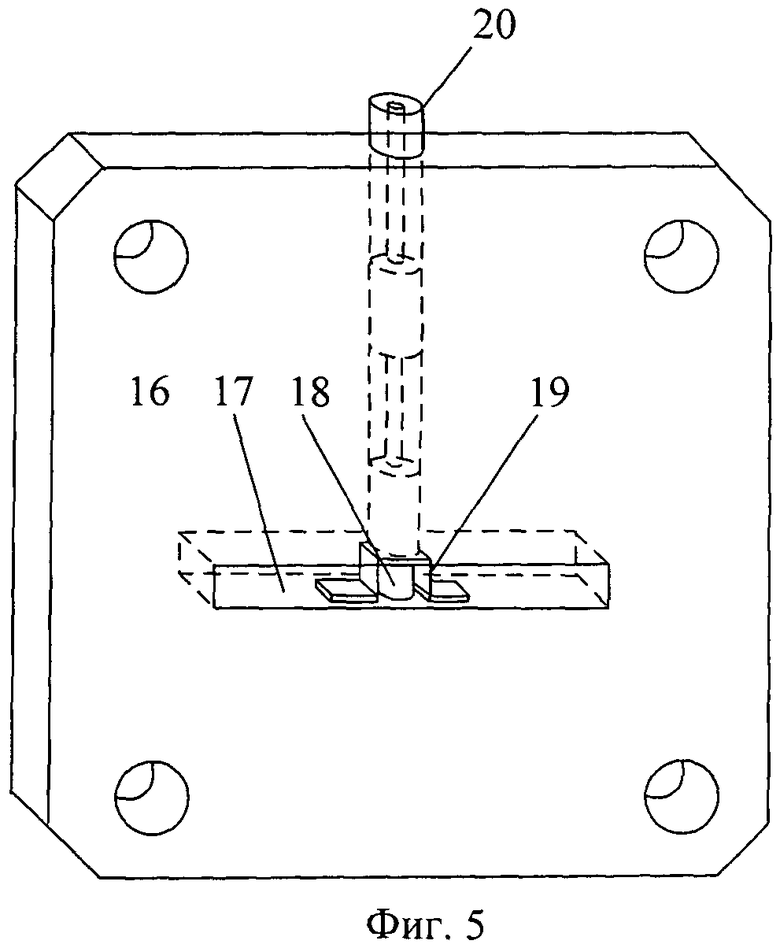
на фиг.5 - внешний вид усилителя на ЛПД (УЛПД) с волноводно-полосковым резонатором (16 - корпус усилителя, представляющий собой диодную секцию, 17 - прямоугольный волновод, 18 - ЛПД, 19 - ленточный полосковый проводник, 20 - коаксиальный дроссельный фильтр) (см. пат.№645496 РФ, МКИ НОЗ В 7/14. Генератор сверхвысоких частот / Волощенко П.Ю., Волощенко Ю.П. (РФ); ТРТИ (РФ). Заявл. 01.03.77; Зарег.23.08.93),
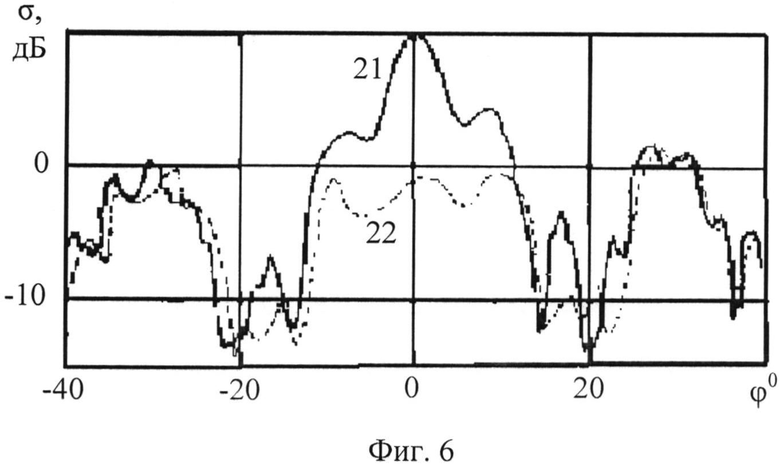
на фиг.6 представлены моностатические индикатрисы рассеяния пассивного РЛО и активного модуля, в волноводной части которого размещен ЛПД, работающий в усилительном режиме (кривая 21 - при постоянном напряжении 83В и токе питания 160 мА ЛПД, кривая 22 - при выключенном УЛПД),
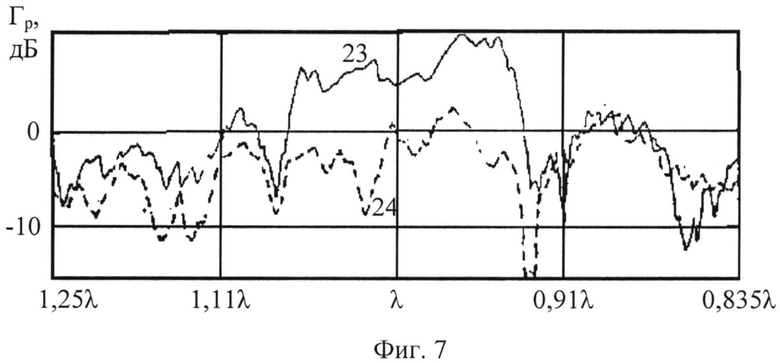
на фиг.7 приведены зависимости нормированного коэффициента отражения мощности ГР=10·lg(ГРМ(Л)/ГРМ) исследуемого устройства от длины волны Л нормально падающего колебания: кривая 23 - соответствует номинальному режиму питания УЛПД, кривая 24 получена для выключенного УЛПД,
на фиг.8 а), б) представлены как конструкция АРЛО, содержащая четыре активных модуля, которые расположены в азимутальной плоскости, так и его многолепестковая диаграмма вторичного переизлучения (12 максимумов, из которых 4 главных, причем кривые 25 и 26 - УЛПД включен и выключен соответственно).
Развитие и экономически обоснованная эксплуатация амфибийной транспортной системы (см. Соколянский В.П., Морозов В.П., Долгополов А.А., Захарченко Ю.А. Амфибийная летательная и транспортная техника для труднодоступных регионов России // Сб. докладов VII научной конференции по гидроавиации «Гидроавиасалон-2008», ч. 10-17. - М.: ЦАГИ, 2008. - С. 96 -101) требует стабильности функционирования сети гидроаэродромов базирования амфибийной летательной и транспортной техники. Долговременное базирование на местности гидроаэродрома дает возможность проведения как с борта гидросамолета, так и с береговых постов многопозиционного радиолокационного мониторинга надводного объема акватории летного бассейна гидроаэродрома дополнительно к визуальному и радиолокационному осмотру ВПП, осуществляемому с борта СВП, с целью оперативного обнаружения, определения координат и параметров движения опасных надводных объектов, а также контроля расположения установленных с борта СВП для разметки ВПП плавучих навигационных знаков: маркерных (по два входных, центральных и выходных соответственно - края ВПП), курсового маяка (ось ВПП), СВП как знака зоны приводнения, причем ориентация СВП носом против ветра указывает направление последнего (направление захода на ВПП для приводнения или взлета).
Реализация предложенного подхода обеспечивает получение необходимой дублирующей информации в реальном масштабе времени о удовлетворительном навигационном состоянии надводной поверхности размеченной ВВП (длина ~ 2500 м, ширина ~ 200 м) на акватории гидроаэродрома, что актуально при неэффективности «традиционного» визуального осмотра ВПП, например, перед приводнением гидросамолета в условиях внезапно наступившей ограниченной видимости: низкая облачность, маскирующее действие гидрометеоров (продукты конденсации водяного пара в атмосфере - дождь, туман, снег, град), в ночное время, при возникновении аварийной ситуации на борту СВП и т.д. С этой целью необходимо разместить на плавучих навигационных знаках: маркерные (по два входных, центральных и выходных соответственно - края ВПП), курсовом маяке (ось ВПП), СВП как знаке зоны приводнения, определяющих необходимые параметры ВПП, а также береговых постройках гидроаэродрома активные радиолокационные отражатели (АРЛО) с круговой диаграммой рассеяния в верхней полусфере (как в угломестной, так и азимутальной плоскостях), что обеспечивает переизлучение в обратном направлении достигших их сигналов посылки РЛС, которые усилены по мощности и когерентны зондирующему излучению, что позволит увеличить как радиолокационную заметность указанных объектов, так и их «индивидуальную» распознаваемость за счет различия частот обратного переизлучения АРЛО при многопозиционном радиолокационном мониторинге как с борта гидросамолета, так и с береговых постов службы обеспечения. На основе полученной информации о навигационном состоянии надводной поверхности ВВП в условиях ограниченной видимости, а, также располагая данными гидроакустического контроля водного объема летного бассейна, береговая служба обеспечения гидроаэродрома принимает то или иное решение относительно взлетно-посадочных действий, сообщаемое по радиоканалу на борт экипажам как СВП, так и гидросамолета, готовящего к выполнению взлетно-посадочных операций. Отметим преимущества предлагаемого варианта.
1) Рассмотрим маскирующие свойства отражений от морской поверхности на примере анализа характера зависимости средних уровней сигналов, отраженных от различных морских целей и морских волн, от дальности наблюдения их корабельным радиолокатором, который представлен на фиг.1, где 1 - корабль водоизмещением 10 тыс. тонн, 2 - корабль водоизмещением 1 тыс. тонн, 3 - помехи от морских волн, приходящих с дальности до 9 км, 4 - помехи от морских волн, приходящих с дальности до 7 км, 5 - катер, 6 - буй, 7 - уровень ограничителя (см. Противолокационная маскировка. Ю.Г. Степанов.- М: Сов. радио, 1968, с. 75-80). Видно, что для таких объектов как катер и буй (сопоставимых по эффективной поверхности рассеяния (ЭПР) с рассматриваемыми в аналоге СВП и плавучими маркерными знаками), на дальностях только до двух миль средние уровни сигналов, отраженных от катера и морских волн, приходящих с дальности до 7 км, приблизительно одинаковы, в то время как на дальностях только до 0,4 мили уровень сигнала от буя соизмерим с маскирующей помехой, а на больших дистанциях для обоих объектов наблюдается полная маскировка.
2) Увеличение эффективности описанных выше операций независимо от условий атмосферной видимости может дать применение пассивных радиолокационных отражателей (РЛО), размещаемых на маломерных и малотоннажных судах, лодках, в частности и СВП и плавучих маркерных знаках навигационного ограждения, имеющих низкую собственную отражательную способность, что обеспечивает повышение безопасности движения на море, позволяя с заданной надежностью их обнаруживать, определять координаты и параметры движения. На фиг.2 представлен усредненный график зависимости медианного значения ЭПР σ(м2) для надводных ТС от их длины (м), где вертикальные отрезки 8, 9, 10 соответствуют диапазонам полученных величин - для бота длиной 4 м с РЛО (уголковый отражатель с ЭПР 4 м2); лодки; трех судов различных длин (см. В.М. Комаров и др. Радиотехнические системы предупреждения столкновений при плавании в прибрежных водах и узких фарватерах // Зарубежная радиоэлектроника. - 1983. - №2. - С. 72.). На фиг. 3 изображены графики зависимости радиолокационной заметности рыболовецкого бота ( кормовой ракурс, носовой ракурс) от удаления r (в милях) его местоположения: 11 - без РЛО; 12 - с РЛО (уголковый отражатель с ЭПР 100 м2). Из экспериментальных исследований радиолокационной заметности малоразмерных судов с РЛО и без них установлено, что размещение на рыболовецком боте на высоте 4 м РЛО (уголковый отражатель с ЭПР 4 м2) позволило повысить (примерно на порядок) его радиолокационную заметность и довести медианное значение ЭПР до 3-5 м2. Дальность обнаружения рыболовецкого бота увеличивается за счет установки на нем РЛО (уголковый отражатель с ЭПР 100 м2) при длине ЭМВ Л=3,2 см облучающего сигнала. Следует учитывать, что существует обратная зависимость между размерами ТС и ЭПР РЛО: чем меньше судно, тем больше должна быть ЭПР пассивного РЛО. Наиболее жестко необходимость этого требования проявляется при установке РЛО на плавучих навигационных знаках, высота h которых меньше 4 м. Так, достижение распознаваемости одного порядка для плавучих навигационных знаков разных высот (h=2 м, 1,5 м) обеспечивается применением пассивных РЛО с существенно отличающейся ЭПР ~ 40 м2, ~ 100 м2 соответственно.
Для формирования круговой диаграммы рассеяния пассивного РЛО предлагается использовать несколько конструкций: уголковые отражатели, объединенные в единый блок, линза Люнеберга (ЛЛ) - шар из неоднородного диэлектрика, показатель преломления которого изменяется вдоль радиуса по определенному закону, в результате чего плоский фронт падающей ЭМВ фокусируется в точку на его поверхности.
Рассмотрим некоторые известные сообщения о характеристиках современных РЛО. Например, фирмой Victory Marine Fitting выпускается цилиндрическая решетка в 10 этажей из повернутых относительно друг друга двухгранных уголковых отражателей Mobri MS7, имеющая диаметр 10 см, высоту 80 см, массу 1,2 кг, стоимостью $64. Английской фирмой Firdell Multiflectors Ltd производятся навигационные знаки с повышенной эквивалентной ЭПР типа Blipper 210-7. Они представляют собой многоярусные решетки, имеющие диаметр 24,5 см, высоту 60 см, массу 2,3 кг, стоимость $82. Многоэлементные отражатели обеспечивают при большой площади обратного рассеяния угловое перекрытие в пространственном угле 360° по азимуту и примерно 30° по углу места. Для плавучих буев такое угловое перекрытие достаточно. Ребра уголковых отражателей должны быть ориентированны относительно друг друга строго под 90°. Отклонение более чем на 1,5° уменьшает его эффективность как минимум на 25%. Кроме того, из-за взаимодействия отдельных уголковых отражателей в результирующей диаграмме обратного рассеяния появляются провалы - "мертвые зоны", что может явиться причиной столкновения водных транспортных средств. Для сокращения числа провалов в диаграмме рассеяния разработан усовершенствованный уголковый отражатель, состоящий из 3-х отражающих взаимноортогональных круглых пластин, центры которых расположены в одной точке. Провалы в диаграмме рассеяния отражателя практически отсутствуют. Уголковый отражатель снабжен элементами крепления, которые позволяют размещать его как непосредственно как над ватерлинией, так и на надстройках. Рекомендуемая минимальная высота его установки над ватерлинией 1,83 м. Такой отражатель обладает достаточной прочностью и не требует ухода, что позволяет применять его не только на судах, но и на буях. Главное преимущество уголкового отражателя по сравнению с другими подобными устройствами - это простота конструкции.
3) В настоящее время перспективным направлением использования активных антенн, содержащих негатроны - электронные приборы с отрицательным сопротивлением, например лавинно-пролетные диоды (ЛПД), являются оснащение ими РЛО, применяемых для улучшения распознаваемости на экране РЛС транспортных средств (например, малоразмерных и малотоннажных судов и самолетов), навигационных знаков (буев, бакенов, маяков), аварийных спасательных средств (шлюпок, плотов, жилетов), рыболовных сетей и т.д., а также создание усиливающих приемопередающих или передающих антенн активных радиолокационных отражателей (АРЛО), что позволяет, в сравнении с пассивными РЛО, за счет изменения параметров полупроводникового прибора, регулировать характеристики отражателей: увеличить эффективную поверхность рассеяния, модулировать отраженный сигнал, расширить рабочую полосу частот, уменьшить вес и габариты. Разработанный активный модуль (см. фиг.4) состоит из пирамидальной рупорной антенны 13, волноводного усилителя 14 на ЛПД (У ЛПД) типа 2А709, включенного по схеме «на отражение» с помощью короткозамкнутого (КЗ) отрезка 15 волновода, внешний вид усилителя на ЛПД с волноводно-полосковым резонатором (см. пат.№645496 РФ, МКИ НОЗ В 7/14. Генератор сверхвысоких частот / Волощенко П.Ю., Волощенко Ю.П. (РФ); ТРТИ (РФ). Заявл. 01.03.77; Зарег. 23.08.93) показан на фиг. 5. Корпус 16 усилителя представляет собой диодную секцию с отверстием 17 в виде прямоугольного волновода, размером (23×2) мм2. Один конец волновода закрывается короткозамыкающей заглушкой, а другой - подключается к нагрузке. Диод 18 помещен под изогнутым ленточным полосковым проводником 19, в свою очередь, установленным внутри прямоугольного волновода. В нижней части корпуса размещено разрезное гнездо - цанга, осуществляющая пружинный контакт с теплоотводящим электродом ЛПД (на фиг. 5 не показана). Для предотвращения утечки СВЧ мощности в цепь питания диода предусмотрен коаксиальный дроссельный фильтр 20, вмонтированный с помощью диэлектрических и ферроэпоксидных шайб в верхнюю часть корпуса. Толщина секции и наименьшая длина отрезка прямоугольного волновода определяется наибольшими поперечными размерами диода и цангового держателя. Индуктивное сопротивление, вносимое волноводно-полосковым резонатором, подключается параллельно емкости диода. Стабилизация режима работы схемы и настройки полосы усиливаемых частот осуществляется изменением геометрических размеров полоскового элемента, нижние концевые участки которого являются обкладкам конструктивных конденсаторов, обеспечивающих короткое замыкание токов СВЧ в регенерированном контуре усилителя. Связь диода с нагрузкой регулируется конденсатором, образованным между полоской и верхней широкой стенкой волновода. Конструкция усилителя позволяет использовать диоды с разными параметрами, настраивать коэффициент и полосу усиления устройства во всей частотной области существования динамической отрицательной проводимости ЛПД данного типа без невзаимных развязывающих элементов. При измерении в волноводном тракте площадь усиления используемого усилителя составила 1,1 ГГц; он имеет резонансную АЧХ с наибольшим значением коэффициента усиления (12±0,5) дБ на частоте колебаний 10,55 ГГц при номинальном режиме питания ЛПД: напряжении 83 В и токе 160 мА. Размеры горловины рупора совпадают с размерами поперечного сечения волновода УЛПД. Длина рупора от раскрыва до его горловины равна 6,25 Л, размер раскрыва рупора составляет (3,28×2,8)Л2.
Из анализа моностатических индикатрис рассеяния (МИР) пассивного РЛО и активного модуля (фиг.6), в волноводной части которого размещен ЛПД, работающий в усилительном режиме (кривая 21 - при постоянном напряжении 83 В и токе питания 160 мА ЛПД, кривая 22 - при выключенном УЛПД) следует: 1) основной лепесток индикатрисы вблизи вершины симметричен по отношению к оси φ=0° в обоих режимах, а положения двух ближайших к оси МИР минимумов равны ±14°; 2) ширина основного лепестка активного модуля с выключенным ЛПД по уровню (-3 дБ) составляет 24°, а по его минимумам - 28°; максимальный уровень боковых лепестков (-10) дБ; 3) ширина основного лепестка активного модуля с включенным ЛПД по уровню (-3 дБ) составляет 6°, а по его минимумам -28°; максимальный уровень боковых лепестков (-15) дБ; 4) ширина боковых лепестков по минимумам в обоих режимах работы одинакова равна 5°; 5) увеличение ЭПР активного модуля на величину коэффициента усиления УЛПД, т.е. 12 дБ, происходит около направления главного максимума; 6) при фиксированном токе питания диода и коэффициенте усиления УЛПД на исследуемой длине волны и углах падения ЭМВ, отличающихся от нормального (-12°≤φ≤+12°), значение ЭПР активного модуля уменьшается от максимального значения до ЭПР отражателя в пассивном режиме. Таким образом, наибольшая амплитуда модуляции рассеянного поля активного модуля составляет (+12 дБ) по отношению к максимальной величине ЭПР отражателя в пассивном режиме, а коэффициент модуляции лежит в интервале от нуля до единицы в пределах основного лепестка МИР.
Из анализа зависимостей нормированного коэффициента отражения мощности ГР=10·lg(ГРМ(Л)/ГРМ) исследуемого устройства (фиг.7) от длины волны Л нормально падающего колебания (кривая 23 - соответствует номинальному режиму питания УЛПД, кривая 24 получена для выключенного УЛПД) следует: 1) используя кривые можно рассчитать максимальное, минимальное значение коэффициента мощности отражателя и амплитуду колебаний, его ЭПР при регулировке тока питания ЛПД на разных длинах волн падающих колебаний; 2) полоса усиливаемых длин волн активного модуля лежит в интервале (0,93-1,076)Л; 3) зависимость разности графиков Г=f(Л) имеет два максимума, коротковолновый максимум разности кривых 1 и 2, равный 12 дБ, наблюдается при длине волны 0,945Л и соответствует центральной частоте резонансной амплитудно-частотной характеристики (АЧХ) УЛПД. Таким образом, с помощью УЛПД может создавать небольшие области усиления или затухания при облучении РЛО ЭМВ, длины которых выходят за пределы указанного диапазона. Измерение характеристик рассеянного поля активного рупорного отражателя с УЛПД и пассивного рупорного отражателя, применяемого в радиолокационных отражателях зарубежными фирмами, показало, что эффективная поверхность рассеяния активного модуля вблизи направления главного максимума МИР увеличивается в соответствии с ростом коэффициента усиления диода. Это увеличивает дальность обнаружения навигационных средств, оборудованных такими отражателями, т.к. она пропорциональна корню четвертой степени из суммарной ЭПР активной антенны. Регулировкой режима питания ЛПД можно осуществить амплитудную и фазовую модуляцию рассеянного поля, что повышает информативность отраженного сигнала.
На фиг.8 а), б) представлены как конструкция АРЛО, содержащая четыре активных модуля, которые расположены в азимутальной плоскости, так и его многолепестковая диаграмма вторичного переизлучения (12 максимумов, из которых 4 главных, причем кривые 25 и 26 - УЛПД включен и выключен соответственно). Рассмотренный АРЛО пригоден для размещения твердотельных усилителей СВЧ диапазона в точках фокусировки ЭМ энергии на поверхности рефлектора и отражения ее от металлических частей конструкции, в частности, целесообразно реализовывать активные модули на твердотельных устройствах с лавинно-пролетными диодами (ЛПД) - двухполюсных приборов, обладающих динамической отрицательной проводимостью СВЧ. ЛПД имеет протяженную область взаимодействия потока носителей заряда с ЭМ полем и наибольшее рабочее значение напряженности электрического поля в объеме полупроводника, в результате чего они являются самыми мощными полупроводниковыми приборами трехсантиметрового диапазона длин волн и применение этих диодов позволит улучшить энергетические параметры АРЛО. Например, кремниевый ЛПД типа 2А709Б обеспечивает выходную мощность 0,5 Вт активного устройства в диапазоне частот (9,0-9,7) ГГц, а арсенид-галлиевый ЛПД типа 3А739Б отдает мощность 5 Вт в интервале (9,2-10,3) ГГц, ЛПД имеют относительно высокое постоянное напряжения питания (ЛПД типа 2А709Б от 70 В до 130 В, а диод 3А739Б до 50 В), что увеличивает надежность и энергопрочность, расширяет динамический диапазон активных твердотельных устройств СВЧ при чрезмерном возрастании мощности входного сигнала или изменении режима работы антенны.
Использование АРЛО устраняет необходимость установки его на больших высотах, позволяет снизить требования к точности изготовления конструкции РЛО, уменьшить вес и габариты, парусность и ветровую нагрузку отражателя (см. Волощенко П.Ю. Исследование модуляции рассеянного поля отражателя с рупорной антенной на лавинно-пролетном диода. Радиотехника и электроника. 1999, т.44. №4, с.482-484), а также разработанная конструкция позволяет создать повое поколение современных РЛО, превосходящих по своим параметрам зарубежные аналоги.
Оснащение необходимым количеством активных модулей используемого в предлагаемом способе АРЛО позволяет:
1) регулировать плотность потока мощности и ЭПР источников вторичного излучения, которая может быть существенно больше (или меньше) плотности падающей мощности,
2) варьировать в верхней полусфере параметры круговой диаграммы рассеяния (форму и ширину главных лепестков, относительный уровень боковых максимумов, коэффициент направленного действия),
3) повысить информативность отраженного сигнала,
4) расширить рабочий диапазон частот за счет компенсации потерь СВЧ-энергии в конструкции;
5) упростить конструкцию, уменьшить высоту размещения АРЛО в пространстве, габариты и массу, парусность и ветровую нагрузку.
Кроме того, использование такого АРЛО улучшает тактические характеристики навигационных систем:
1) вшивает дальность обнаружения на индикаторе кругового обзора радиолокационной станции (РЛС) точечных объектов радиолокационного наблюдения: малоразмерных и малотоннажных судов и летательных аппаратов, навигационных знаков (буев, бакенов, створов, маяков), установленных на нешироких транспортных путях (например, на посадочных полосах аэродромов, пирсах, молах, бонах на акваториях портов, морских каналах и на фарватерах рек), аварийных спасательных средств (шлюпок, плотов, логистов), сетей ограждения акватории и других надводных и береговых, наземных и воздушных объектов как в условиях ограниченной видимости (например, в тумане или в темное время суток), так и при навигации в зимнее время года, когда из-за ледовой обстановки в заливах морей и на реках убираются плавучие навигационные знаки и ориентация судов на воздушной подушке возможна лишь по береговым стационарным гидрографическим и космическим объектам,
2) улучшает наблюдаемость и распознаваемость объектов или элементов их конструкций оператором на экране РЛС,
3) повышает помехозащищенность и надежность, точность наведения и сопровождения объектов радиолокационного наблюдения автоматическими радионавигационными системами предупреждения столкновений,
4) снижает маскирующее действие гидрометеоров и отражений от береговой и морской поверхности.
Следовательно, актуальность применения АРЛО в предлагаемом способе обусловлена тем, что он позволяет увеличить количество измеряемых параметров отраженного электромагнитного колебания, являющегося носителем информации об объекте радиолокационного наблюдения, и улучшить тактико-технические характеристики радионавигационных систем кораблей и самолетов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРОВОДКИ БЕСПИЛОТНОГО ГИДРОСАМОЛЁТА НА АКВАТОРИИ ЛЁТНОГО БАССЕЙНА | 2018 |
|
RU2705475C1 |
| СПОСОБ ПОДГОТОВКИ ЛЕТНОГО БАССЕЙНА ГИДРОАЭРОДРОМА ДЛЯ ВЫПОЛНЕНИЯ ВЗЛЕТА И ПРИВОДНЕНИЯ ГИДРОСАМОЛЕТА | 2011 |
|
RU2464205C1 |
| СПОСОБ ПОДГОТОВКИ ГИДРОАЭРОДРОМОВ ДЛЯ ВЫПОЛНЕНИЯ ВЗЛЕТА И ПОСАДКИ ГИДРОСАМОЛЕТОВ | 1994 |
|
RU2093428C1 |
| УСТРОЙСТВО ДЛЯ ОБОЗНАЧЕНИЯ ГРАНИЦЫ ВПП ГИДРОАЭРОДРОМА | 2014 |
|
RU2584789C1 |
| СПОСОБ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2002 |
|
RU2214943C1 |
| САМОХОДНЫЙ ГИДРОАКУСТИЧЕСКИЙ БУЙ-МАЯК И СПОСОБ НАВИГАЦИОННОГО ОБОРУДОВАНИЯ МОРСКОГО РАЙОНА | 2018 |
|
RU2710831C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ПОСАДКИ ГИДРОЛЕТАТЕЛЬНОГО АППАРАТА (ГДЛА) НА ВОДУ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2135399C1 |
| СИСТЕМА МОНИТОРИНГА ТЕХНИЧЕСКОГО СОСТОЯНИЯ СРЕДСТВ СВЯЗИ И НАВИГАЦИОННОГО ОБОРУДОВАНИЯ | 2021 |
|
RU2774400C1 |
| МОБИЛЬНЫЙ ГИДРОАКУСТИЧЕСКИЙ БУЙ-МАЯК И СПОСОБ НАВИГАЦИОННОГО ОБОРУДОВАНИЯ МОРСКОГО РАЙОНА | 2018 |
|
RU2709058C2 |
| Способ формирования объектов имитируемой модели фоноцелевой обстановки на необитаемой территории ледового пространства | 2021 |
|
RU2816461C2 |
Изобретение относится к области амфибийного транспорта и касается повышения безопасности взлетно-посадочных действий магистральных самолетов-амфибий. Во время подготовки летного бассейна гидроаэродрома определяют положение ВПП как с учетом направления ветра, так и из условия минимальности имеющейся на акватории ветровой волны. Экипаж СВП производит разметку ВПП посредством установки плавучих навигационных знаков: маркерных, курсового маяка, СВП как знака зоны приводнения. Визуально и с помощью радиолокатора и гидролокатора осматривает путь перемещения гидросамолета по акватории. На борту СВП размещает глиссадные и курсовые радиомаяки для посылки и приема радиосигналов. Операторы береговой гидроакустической службы осуществляют различные виды подводного мониторинга. На плавучих навигационных знаках и на береговых постройках гидроаэродрома размещают активные радиолокационные отражатели (АРЛО) с круговой диаграммой рассеяния в верхней полусфере, что обеспечивает переизлучение в обратном направлении достигших их сигналов посылки РЛС, которые усилены по мощности и когерентны зондирующему излучению, что приводит к увеличению собственной радиолокационной заметности объектов. Достигается получение уточненной информации о навигационном состоянии летного бассейна гидроаэродрома за счет многопозиционного радиолокационного мониторинга как с борта гидросамолета, так и с берегового поста службы обеспечения, повышение безопасности взлетно-посадочных действий на мелководной акватории. 3 з.п. ф-лы, 9 ил.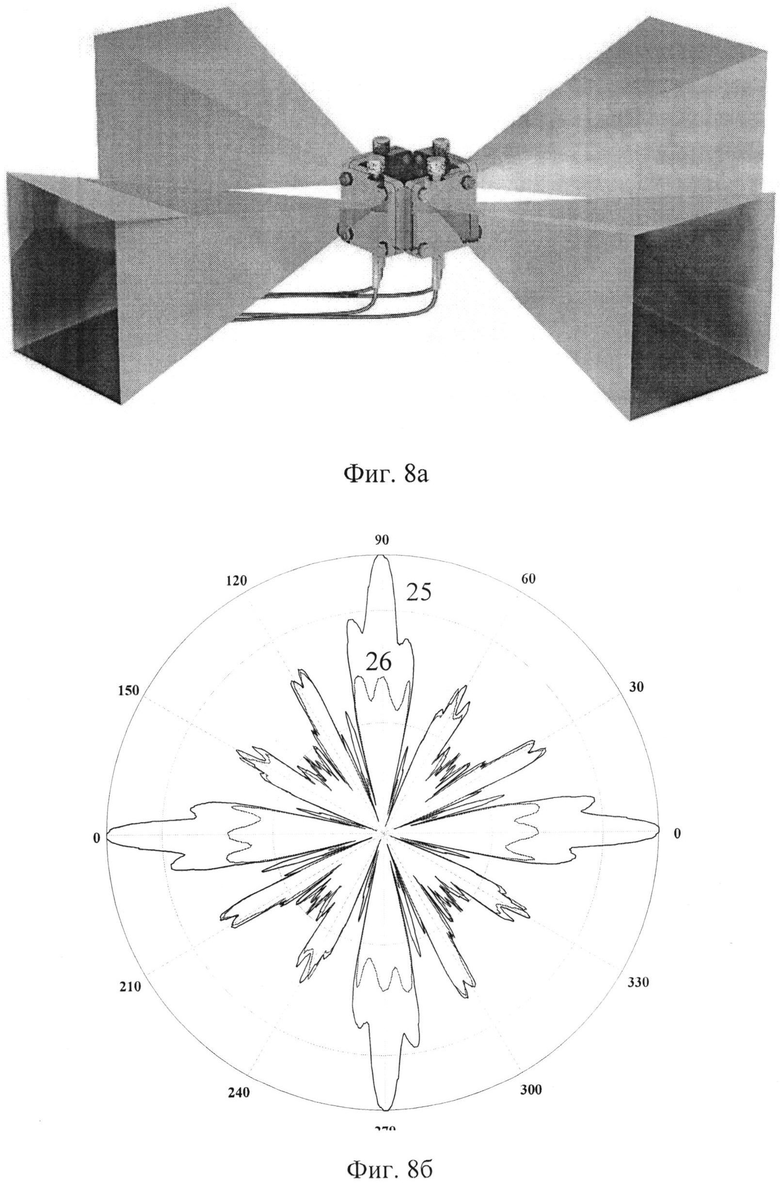
1. Способ подготовки летного бассейна гидроаэродрома для выполнения взлета и приводнения гидросамолета, заключающийся в том, что в пределах летного бассейна гидроаэродрома определяют положение ВПП как с учетом направления ветра, так и из условия минимальности имеющейся на акватории ветровой волны, экипаж СВП производит разметку ВПП посредством установки плавучих навигационных знаков: маркерных (по два входные центральных и выходных соответственно - края ВПП), курсового маяка (ось ВПП), СВП как знака зоны приводнения, причем ориентация СВП носом против ветра указывает направление последнего (направление захода на ВПП для приводнения или взлета), в процессе чего визуально, а также с помощью радиолокатора и гидролокатора осматривает путь перемещения гидросамолета по акватории, осуществляет швартовку, отшвартовку и буксировку гидросамолета после его приводнения или перед взлетом, а также на борту СВП размещает глиссадные и курсовые радиомаяки для посылки и приема радиосигналов, обеспечивающих приводнение гидросамолета в условиях плохой видимости, причем заблаговременно, в процессе подготовки летного бассейна экипаж судна на воздушной подушке размещает на дне акватории вдоль осей четырех радиальных (сдвинуты относительно друг друга на 45°) ВПП приемоизлучающие антенные устройства полусферической формы, обеспечивающие квантованный как по направлению, так и по «частотной окраске» ультразвуковой эхопоиск объектов в водном объеме в режимах кругового или секторного обзора как в азимутальной, так и угломестной плоскостях; донные приемоизлучающие антенные устройства соединены кабелем с аппаратурой береговой гидроакустической службы гидроаэродрома, обеспечивающей формирование зондирующих сигналов возбуждения однотипных преобразователей накачки параметрических антенн, образующих полусферическую апертуру приемоизлучающего антенного устройства, обработку и отображение информации, полученной в широком частотном, но «индивидуальном» для каждого антенного устройства, диапазоне, а операторы береговой гидроакустической службы осуществляют различные виды подводного мониторинга: ультразвуковое зондирование водного объема взлетно-посадочной полосы, соответствующей имеющемуся направлению ветра; текущий эхопоиск на периметре летного бассейна гидроаэродрома; режим пассивного наблюдения дальней подводной обстановки в шельфовой зоне, примыкающей к акватории гидроаэродрома, причем перечисленные операции береговая гидроакустическая служба может выполнять на постоянной основе вне зависимости от погодных условий, времени суток и года; одновременное использование соседних донных антенных устройств полусферической формы дает возможность дистанционного получения информации о состоянии водного объема (глубина, направление и скорость течения водных масс), границы раздела «воздух-вода» (высота, скорость и направление движения ветровых волн, границы раздела «вода-лед» (толщина льда) в различных точках акватории летного бассейна; на основе полученной информации о подводной обстановке на акватории береговая гидроакустическая служба гидроаэродрома, принимает то или иное решение относительно взлетно-посадочных действий, сообщаемое по радиоканалу на борт экипажам как СВП, осуществившему описанное выше, так и гидросамолета, готовящего к выполнению взлетно-посадочных действий, отличающийся тем, что на плавучих навигационных знаках: маркерных (по два входных, центральных и выходных соответственно - края ВПП), курсовом маяке (ось ВПП), СВП как знаке зоны приводнения, а также береговых постройках гидроаэродрома, размещают активные радиолокационные отражатели (АРЛО) с круговой диаграммой рассеяния в верхней полусфере (как в угломестной, так и азимутальной плоскостях), что обеспечивает переизлучение в обратном направлении достигших их сигналов посылки РЛС, которые усилены по мощности и когерентны зондирующему излучению, т.е. приводит к увеличению собственной радиолокационной заметности указанных объектов.
2. Способ по п.1, отличающийся тем, что в верхней полусфере АРЛО имеет форму выпуклой поверхности вращения второго порядка, образованной необходимым количеством активных модулей, каждый из которых представляет собой двухстороннюю щелевую слабонаправленную антенну трехсантиметрового диапазона длин волн, интегрированную с усилителем, причем частоты переизлучения в обратных направлениях, усиленные по мощности сигналов для всех используемых АРЛО, различны, что обеспечивает «индивидуальную» радиолокационную распознаваемость на акватории объектов, на которых они размещены, - плавучих навигационных знаков: маркерных (края ВПП), курсового маяка (ось ВПП), СВП (знак зоны приводнения), береговых построек гидроаэродрома.
3. Способ по п.1, отличающийся тем, что как операторы береговой службы обеспечения, так и экипаж гидросамолета осуществляют многопозиционный радиолокационный мониторинг летного бассейна гидроаэродрома и, в частности, оценивают удовлетворительность навигационного состояния надводного объема ВПП по расположению плавучих навигационных знаков: маркерных (по два входных, центральных и выходных соответственно - края ВПП), курсового маяка (ось ВПП), СВП как знака зоны приводнения, причем ориентация СВП носом против ветра указывает его направление, т.е. направление захода на ВПП для приводнения или взлета.
4. Способ по п.1, отличающийся тем, что на основе полученной информации о навигационном состоянии надводной поверхности ВВП в условиях ограниченной видимости береговая служба обеспечения гидроаэродрома принимает то или иное решение относительно взлетно-посадочных действий, сообщаемое по дополнительному радиоканалу на борт экипажам как СВП, осуществляющему описанные выше действия, так и гидросамолета, готовящего к выполнению взлетно-посадочных операций.
| СПОСОБ ПОДГОТОВКИ ЛЕТНОГО БАССЕЙНА ГИДРОАЭРОДРОМА ДЛЯ ВЫПОЛНЕНИЯ ВЗЛЕТА И ПРИВОДНЕНИЯ ГИДРОСАМОЛЕТА | 2011 |
|
RU2464205C1 |
| СПОСОБ ПОДГОТОВКИ ГИДРОАЭРОДРОМОВ ДЛЯ ВЫПОЛНЕНИЯ ВЗЛЕТА И ПОСАДКИ ГИДРОСАМОЛЕТОВ | 1994 |
|
RU2093428C1 |
| СПОСОБ ОРИЕНТИРОВАНИЯ В ПРОСТРАНСТВЕ ДВИЖУЩЕГОСЯ ТРАНСПОРТА ПО СВЕТОВОМУ ЛУЧУ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2322371C2 |
| US 4101893 A, 18.07.1978 | |||
| DE 3629911 A1, 10.03.1988 | |||

