Изобретение относится к области гидролокации и предназначено для определения положения наблюдаемого объекта по глубине в водной среде.
Предложенные способ и система могут быть использованы при проведении подводных работ, охранных мероприятий, поисковых и спасательных работ, защиты судов и сооружений со стороны водной среды, предотвращении столкновений, контроле рыбьих скоплений, проведении научных исследований, в том числе биологических, особенно в задачах, когда необходимо знать глубину обнаруженных в водной среде объектов, например, для их классификации.
Из уровня техники известны решения в области эхолокации, позволяющие определить положение подводных объектов по глубине.
Из патента РФ №2078353 на изобретение известно решение, позволяющее определить глубину погружения подводного объекта с известными геометрическими размерами. Изобретение направлено на решение задачи определения глубины погружения сплошных и имеющих периодическую структуру подводных объектов и их положения на линии, соединяющей излучатель с приемником. Излучатель находится вблизи поверхности, приемник расположен на дне, а объект находится между ними. Акустический сигнал излучают в область возможного нахождения объекта, осуществляя излучение и прием сигналов в широкой полосе частот, определяют частоту, на которой исчезает эффект затенения объектом излучателя, и по этим данным глубину объекта. При этом для определения глубины объекта, имеющего периодическую структуру, выбирают длину волны, превышающую расстояние между составными частями объекта, но соизмеримую с общими размерами последнего.
Недостатком решения является ограниченная область применения, возможность определения глубины только конкретного объекта (с известными геометрическими размерами), отсутствие учета при измерениях вертикального распространения скорости звука в водной среде.
В патенте РФ №2208811 на изобретение предлагается способ получения информации о шумящих в море объектах, учитывая скорость звука в воде по глубине. Шум, излученный движущимися объектами, принимают антенной, по меньшей мере, в трех пространственных каналах наблюдения сигнала, приходящего под разными углами из-за вертикальной рефракции звука. Принятый шумовой сигнал дискретизируют по времени и квантуют на несколько уровней, измеряют скорость звука в воде в зависимости от глубины и волнение поверхности моря. По измеренным данным и известным характеристикам дна и известным характеристикам приемной системы рассчитывают сигнал объекта в каждом пространственном канале для нескольких значений расстояния, решая уравнение гидроакустики в пассивном режиме, и в результате сравнения измеренных значений сигнала с расчетными принимают решение о дистанции и скорости и о наличии нескольких шумящих объектов на одном направлении.
Недостатком данного решения также является ограниченная область применения, в том числе вследствие того, что информацию предлагаемым способом можно получить только о шумящих объектах.
Также известно изобретение по патенту РФ №2271551, которое может использоваться в гидролокационных устройствах обнаружения подводных объектов (подводных лодок, малоразмерных объектов: мин, подводных пловцов). Физическая сущность изобретения заключается в определении пространственных углов визирования акустического луча (пеленгов) на отражающий объект, т.е. направления прихода отраженного от объекта звукового луча, на основе пространственно-фазовой и пространственно-корреляционной обработки отраженных сигналов в плоскости фронта волны принимаемого сигнала.
Данное решение, используя направление прихода отраженного от объекта звукового луча, не позволяет определить глубину объекта без учета рефракции звуковых лучей в реальной водной среде. Кроме того, использование направления прихода луча, даже при учете рефракции, не дает выхода на глубину объекта из-за слабой разрешающей способности приемных систем по углам прихода звуковых лучей в реальных условиях их работы.
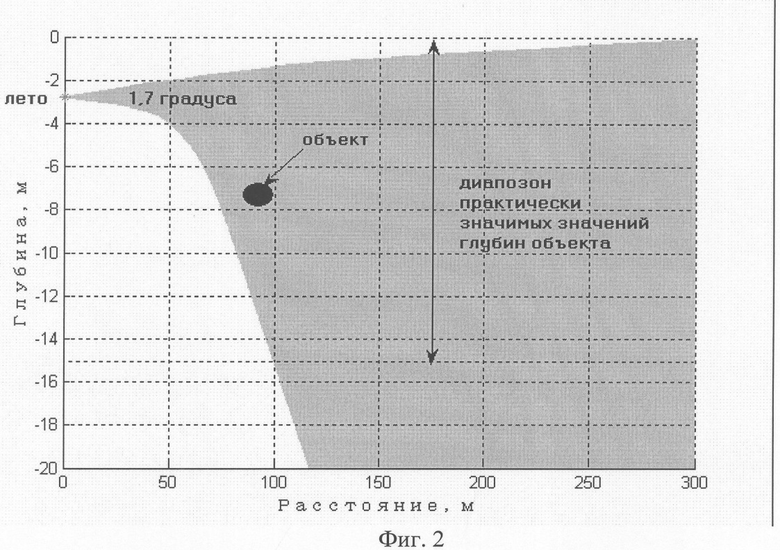
Действительно, в условиях возможных сезонных распределений скорости звука по глубине - отрицательный градиент скорости звука в приповерхностной области для лета, положительный градиент для зимы и слабый положительный градиент в межсезонье, представленных на фиг.1, диапазон углов прихода звуковых лучей для практически значимых глубин объекта до 10-15 м от водной поверхности и расстояний до объекта в сто и более метров не превышает нескольких градусов, как это видно из фиг.2 и 3, где в качестве примера представлены диапазоны траекторий звуковых лучей в вертикальной плоскости для облучаемой зоны водного слоя.
Отсюда следует, что для различения лучей от объектов, находящихся на разных глубинах, требуется разрешение по углу в доли градуса, что является технически недостижимой задачей в натурных морских условиях, особенно при работе с обеспечивающего судна, испытывающего качку.
Известно решение в области гидроакустики для обнаружения и сопровождения подводных объектов, вторгающихся в контролируемую акваторию натурного водоема (патент РФ №2150123 на изобретение). В этом решении с помощью гидроакустических отражателей, располагаемых по эллиптической поверхности, задают контролируемую область натурного водоема. При этом гидроакустические излучатель и приемник расположены в фокусах эллиптической поверхности. Излучатель выполнен в виде круговой гидроакустической антенны, а приемник, подключенный к индикатору кругового обзора, - с равномерной характеристикой направленности.
Последовательно по различным направлениям излучатель направляет импульсы акустической энергии, которые за один и тот же промежуток времени достигают приемника, отражаясь от гидроакустических отражателей. На индикаторе кругового обзора формируется серия импульсов. При вторжении подводного объекта в контролируемую зону один из импульсов на индикаторе кругового обзора пропадает, что указывает на наличие цели. Последовательная обработка выходных сигналов позволяет определить курс и скорость движения цели.
Недостатком данного решения является ограниченная область применения вследствие отсутствия определения положения объекта относительно дна.
В изобретении по патенту РФ №2272303 предложен способ определения глубин акватории, согласно которому излучают гидроакустические сигналы фазовым гидролокатором бокового обзора и принимают отражение сигнала в двух точках, расположенных по вертикали на заданном расстоянии. Измерение времени задержки синфазных сигналов по вертикали, в том числе и отраженных от ровной поверхности дна, осуществляют по каждому расчетному направлению. Определяют по полученным данным направления прихода синфазных сигналов и искомых глубин и распознают морской грунт. Дополнительно измеряют изменения скорости звука непосредственно на горизонте антенны, по значениям которых вводят корректирующие сигналы. Определяют угол сноса носителя антенн, линейные и угловые скорости и ускорения непосредственно на корпусе антенн. Вводят поправку временного кода, определяемого за время измерений. Распознавание морского грунта выполняют методом кластеризации и численного анализа. Устройство для реализации данного способа содержит антенны, передающий блок, приемоизмерительный блок, блок управления, вычислитель, регистратор, устройство коррекции, устройство хронирования информации, а также блок датчиков измерения линейных и угловых скоростей и ускорений.
Данное решение, посвященное распознаванию морского грунта, не может быть применено для обнаружения объектов в водной толще и определения их местоположения.
Из зарубежных патентных источников также известны аналогичные системы, см. японскую заявку JP 2006078329, публикация 23.03.2006, JP 2003215230, публикация 30.07.2003, патент США №7006406.
За наиболее близкий аналог по технической сущности и достигаемому результату можно принять известный в гидролокации способ определения пространственного положения наблюдаемого объекта в водной толще путем определения направления прихода отраженного от объекта звукового луча (см. Р.Д.Урик. Основы гидроакустики. Л., Судостроение, 1978, с.71), недостатки которого обсуждались выше.
Задача, на решение которой направлено предложенное изобретение, заключается в создании способа и устройства с простой реализацией и расширенной областью применения, позволяющих определять положение наблюдаемого объекта по глубине в водной среде.
Для решения поставленной задачи предложен способ определения положения наблюдаемого объекта по глубине в водной среде, включающий волновое зондирование и прием отраженных от объекта зондирующих сигналов. При этом прием отраженных от объекта зондирующих сигналов ведут на два или более приемников в воде, разнесенных в пространстве на фиксированное расстояние, с учетом измеренного расстояния от излучателя до объекта, и регистрируют разность времени прихода сигналов на приемники.
Глубину объекта определяют решением обратной задачи путем сопоставления наблюдаемых разностей при известном расстоянии от излучателя до объекта с набором их значений для различных вариантов положения объекта, получаемым расчетным путем для условий известного измеренного вертикального распределения скорости звука в исследуемом водном участке.
Также предложена система для осуществления способа, содержащая гидроакустический прибор для излучения зондирующих сигналов в водной среде с возможностью определения расстояния до объекта, по меньшей мере, два приемника отраженных от объекта зондирующих сигналов, разнесенных в пространстве на фиксированное расстояние, и измеритель вертикального распределения скорости звука в водном слое, соединенные с электронным комплексом обработки данных. Электронный комплекс обработки данных обеспечивает прием сигналов от указанных гидроакустического прибора и приемников, вычисление набора ожидаемых значений разности времен прихода на приемники отраженных от объекта сигналов с учетом измеренного вертикального распределения скорости звука в водном слое для разных расстояний от излучателя до объекта и глубин объекта, определение расстояния до объекта и разности времен прихода на приемники отраженных от объекта сигналов. При этом для оперативного определения положения наблюдаемого объекта по глубине в электронном комплексе обработки данных проводят сопоставление регистрируемых и расчетных значений разностей времени прихода сигналов на приемники для известного измеренного расстояния от излучателя до объекта.
Предпочтительно, чтобы гидроакустический прибор содержал один из приемников отраженных от объекта зондирующих сигналов. Также целесообразно разместить, по крайней мере, один приемник на дне водоема. Гидроакустическим прибором может являться гидролокатор. Электронный комплекс обработки данных может состоять из ряда соединенных между собой электронных блоков приема, обработки и передачи данных.
В отличие от известных решений глубина объекта согласно предложенному способу и системе определяется по разности времени прихода отраженных от объекта звуковых сигналов на пространственно разнесенные фиксированные точки приема.
Сущность заявленного способа и системы поясняется чертежами.
Фиг.1 - диаграммы измеренных сезонных распределений скорости звука по глубине.
Фиг.2 - диапазон траекторий звуковых лучей в вертикальной плоскости для практически значимых глубин объекта на расстояниях более 100 м в условиях лета.
Фиг.3 - диапазон траекторий звуковых лучей в вертикальной плоскости для практически значимых глубин объекта на расстояниях более 100 м в условиях зимы.
Фиг.4 - структурная схема системы по предлагаемому способу.
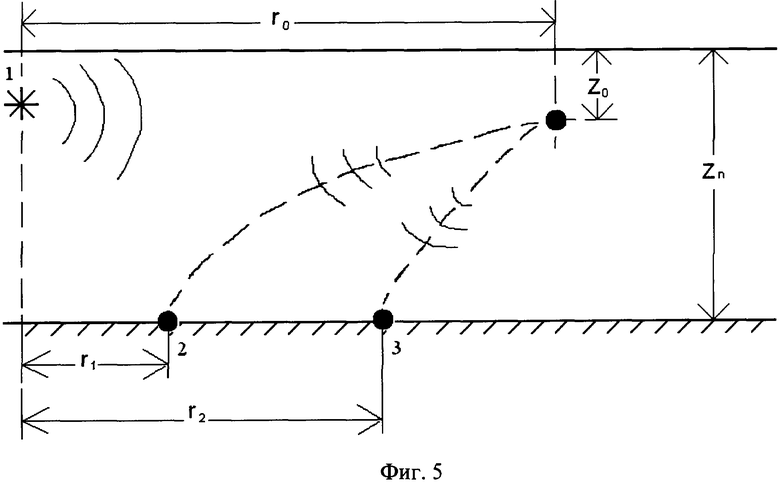
Фиг.5 - вариант практического выполнения системы определения глубины цели в водной среде с приемниками, установленными на дне.
Таблица 1. Результаты теоретического расчета разности времен прихода Δt отраженного от объекта сигнала для двух точек приема, расположенных на одинаковой глубине Zn=20 м и разнесенных по горизонтали на 10 м и 50 м от объекта.
Таблица 2. Результаты компьютерного расчета набора ожидаемых значений разности времен прихода отраженных от объекта сигналов на приемники 2 и 3 на дне для различных глубин объекта Zo и разных расстояний rо объекта от излучателя.
В основе предлагаемого способа лежит учет различия времени распространения звука, отраженного от объекта, по разным звуковым лучам, легко учитываемого при известном вертикальном распределении скорости звука в водной толще в месте наблюдений с использованием компьютерного моделирования, и техническая возможность разрешать временные интервалы.
Для оценки ожидаемых значений различий времени распространения звукового сигнала, отраженного от объекта, по разным звуковым лучам рассмотрим теоретически наиболее простой случай изменения скорости звука по глубине по линейному закону:
С(Z)=С0(1-a·Z),
где C(Z) - скорость звука на произвольной глубине Z;
С0 - скорость звука при Z=0;
a - коэффициент с размерностью L-1, например м-1, характеризующий изменение скорости звука по глубине, задается исходя из закономерностей, выведенных эмпирическим путем, на основе экспериментальных данных.
Данное выражение позволяет получить в аналитической форме зависимость времени t распространения звукового сигнала от объекта по лучам в условиях заданного вертикального распределения скорости звука в водной толще в зависимости от величин: r - расстояние до объекта по горизонтали, Zo - положение объекта по глубине, Zn - глубина точки приема звукового сигнала, отраженного от объекта.
Рассмотрим элемент траектории луча dS в некоторой точке, где угол наклона луча от горизонтали равен ϕ. Отклонение луча по глубине dZ тогда равно:
dZ=dSsin ϕ.
Выражения для r и t тогда запишутся:

Для перехода от ϕ к Z используем закон Снеллиуса:

где Zm - глубина траектории луча при ϕ=0.
Получим 
Введем обозначения: у=1-а·Z,
уm=1-a·Zm,
уо=1-а·Zo,
уn=1-а·Zn.
В результате получим для r и t выражения, допускающие табличное интегрирование:

Исключим уm из выражения для t. Для этого выразим уm через r, уn и уo.

Подставляя затем уm в выражение для t, получим в результате искомую зависимость t от r, уn и у0:

В качестве примера в таблице 1 приведены результаты расчета по полученному выражению разности времен прихода Δt отраженного от объекта сигнала для двух точек приема, расположенных на одинаковой глубине Zn=20 м и разнесенных по горизонтали на 10 м и 50 м от объекта, для разных глубин объекта Zo и значений a=4·10-4 м-1 и С0=1430 м, близких к наблюдаемым для условий конца лета - начала осени (см. фиг.1).
Из полученных данных, представленных в таблице 1, видно, что при изменении глубин объекта на 5 м различие времени распространения сигнала от объекта по разным лучам изменяется на 1,5-2 мс. Отсюда следует, что для обеспечения разрешения 1 м по глубине объекта в рассмотренных условиях требуется разрешение времени распространения по лучам 0,3-0,4 мс. В свою очередь, деление этих значений на скорость звука дает необходимую точность разнесения приемников по горизонтали 0,45-0,6 м.
Предложенные способ и система осуществляются в соответствии со структурной схемой системы, приведенной на фиг.4. Она включает следующие элементы:
1 - гидроакустический прибор с излучателем зондирующих сигналов;
2, 3 - приемники отраженных от объекта зондирующих сигналов;
4 - блок излучения зондирующих сигналов;
5 - блок приема отраженных от объекта сигналов;
6 - блок вычисления набора ожидаемых значений разности времен прихода на приемники отраженных от объекта зондирующих сигналов для возможных глубин объекта в зависимости от расстояния от излучателя до объекта с учетом измеренного вертикального распределения скорости звука в водном слое;
7 - блок определения расстояния до объекта и разности времен прихода отраженных от объекта сигналов по данным, получаемым с блока 4 излучения зондирующих сигналов и блока 5 приема отраженных от объекта сигналов;
8 - блок обработки данных, в котором происходит определение положения наблюдаемого объекта по глубине путем сопоставления определенного в блоке 7 расстояния от излучателя до объекта и разности времен прихода отраженных от объекта сигналов на приемники с набором их вычисленных в блоке 6 значений для возможных глубин объекта;
9 - измеритель вертикального распределения скорости звука в водном слое.
В соответствие с этой схемой в зоне наблюдений в воде устанавливают излучатель 1 зондирующих сигналов и не менее двух пространственно разнесенных друг от друга приемников 2, 3 отраженных от объекта зондирующих сигналов, при этом один из приемников может быть объединен с излучателем (не показано).
В приемной части 5 осуществляется прием отраженных от объекта зондирующих сигналов и по ним в блоке 7 определяется расстояние от излучателя до объекта и разность времен распространения отраженных от объекта зондирующих сигналов до приемников.
Кроме того, в зоне наблюдений проводят замеры в воде профиля скорости звука в вертикальной плоскости, например, зондом-профилографом 9 для учета рефракции звуковых лучей и по ним рассчитывают в блоке 6 наборы значений разности времен распространения сигналов в заданные точки приема в зависимости от вероятного положения объекта в водном слое.
Далее в блоке 8 решается обратная задача по нахождению глубины объекта путем сопоставления определенных в блоке 7 разностей времен прихода и расстояний от излучателя до объекта с набором вычисленных в блоке 6 значений разностей, соответствующих различным расстояниям от излучателя до объекта и различным глубинам объекта.
В качестве примера на фиг.5 приводится схема варианта практического выполнения системы, где rо - расстояние от излучателя зондирующих сигналов до объекта, 2 и 3 - приемники, уложенные на дно на глубине Zn на расстояния r1 и r2 от гидроакустического прибора 1 соответственно. Для данной схемы и условий летнего профиля скорости звука, приведенного на фиг.1, в таблице 2 представлены в мс результаты компьютерного расчета набора ожидаемых значений разности времен прихода отраженных от объекта сигналов на приемники 2 и 3 для различных глубин объекта Zo и разных расстояний rо от излучателя до объекта при заданных параметрах: Zn=20 м, r1=60 м, r2=110 м.
Как видно из данных, представленных в таблице 2, ожидаемые разности прихода на приемники 2 и 3 отраженных от объекта сигналов четко проявляют зависимость от положения объекта по глубине на приемлемых для практики расстояниях от излучателя до объекта 50-250 м.
Как видно из таблицы 2, а также из данных, приводимых выше в таблице 1, для достаточно подробного разрешения обнаруженных объектов по глубине, например с точностью 1 м, необходимо регистрировать временные различия отраженных от объекта сигналов в десятые доли мс. Это, в свою очередь, накладывает требования на точность определения расстояний, на которые разнесены приемники отраженных от объекта сигналов в пределах оценки погрешности менее 1 м.
Необходимо также, чтобы эти расстояния сохранялись неизменными, по крайней мере, в пределах допустимой погрешности. Возможные влияния, например, со стороны волнения должны быть устранены, например, путем установки приемников на дно или на неподвижные платформы.
Техническим результатом настоящего изобретения является осуществление оперативного определения положения наблюдаемого (обнаруженного) объекта по глубине в водной среде при звуковой эхолокации с получением необходимого для практики разрешения значений глубины.
Способ и система определения положения наблюдаемого объекта по глубине в водной среде
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ОБНАРУЖЕНИЯ ОБЪЕКТОВ ПРИ ГИДРОЛОКАЦИИ | 2007 |
|
RU2358289C1 |
| МЕТОД И СИСТЕМА ОБНАРУЖЕНИЯ ЦЕЛЕЙ ПРИ ГИДРОЛОКАЦИИ | 2008 |
|
RU2383899C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2271551C2 |
| Способ навигации и позиционирования подводных объектов в глубоководном канале на больших дальностях и система для его осуществления | 2018 |
|
RU2674404C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2439614C2 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2463624C1 |
| СПОСОБ И СИСТЕМА АВТОМАТИЧЕСКИ УПРАВЛЯЕМОЙ АКТИВНОЙ ОХРАНЫ ОБЪЕКТОВ СО СТОРОНЫ ВОДНОЙ СРЕДЫ | 2014 |
|
RU2577089C1 |
| СПОСОБ ИЗМЕРЕНИЯ ГЛУБИН И ЭХОЛОТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2614854C2 |
| СПОСОБ ГИДРОЛОКАЦИИ В МЕЛКОВОДНЫХ ОБЛАСТЯХ С ОПЕРАТИВНЫМ КОНТРОЛЕМ ИЗМЕНЧИВОСТИ УСЛОВИЙ ОБНАРУЖЕНИЯ ПОДВОДНОЙ ЦЕЛИ | 2017 |
|
RU2664869C1 |
| СПОСОБ ВИЗУАЛИЗАЦИИ ТЕКУЩЕГО СОСТОЯНИЯ РЕЛЬЕФА ДНА ПРИ РАБОТЕ ЗЕМСНАРЯДА | 2020 |
|
RU2740297C1 |


Изобретение относится к области гидролокации и предназначено для определения положения наблюдаемого объекта по глубине в водной среде. Техническим результатом изобретения является осуществление оперативного определения положения наблюдаемого (обнаруженного) объекта по глубине в водной среде при звуковой эхолокации с получением необходимого для практики разрешения значений глубины. Предложен способ и система определения положения наблюдаемого объекта по глубине в водной среде, заключающиеся в волновом зондировании и приеме отраженных от объекта зондирующих сигналов на два или более приемников в воде, разнесенных в пространстве на фиксированное расстояние, с учетом измеренного расстояния от излучателя до объекта. При этом регистрируют разность времени прихода сигналов на приемники. Глубину объекта определяют решением обратной задачи путем сопоставления наблюдаемых разностей при известном расстоянии от излучателя до объекта с набором их значений для различных вариантов положения объекта, получаемым расчетным путем для условий известного измеренного вертикального распределения скорости звука в исследуемом водном участке. 2 н. и 3 з.п. ф-лы, 2 табл., 5 ил.
| SU 1817567 A1, 27.06.1996 | |||
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2271551C2 |
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ ДО КОНТРОЛИРУЕМОГО ОБЪЕКТА (ЕГО ВАРИАНТЫ) | 1997 |
|
RU2125278C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ НА МОРСКОМ РУБЕЖЕ В МЕЛКОМ МОРЕ | 1999 |
|
RU2161319C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТОВ, НАХОДЯЩИХСЯ В ТОЛЩЕ ДОННОГО ГРУНТА | 2004 |
|
RU2280266C2 |
| JP 2001330659 A, 30.11.2001 | |||
| JP 62288586 A, 15.12.1987. | |||

