Изобретение относится к амфибийным транспортным средствам с автоматическим, полуавтоматическим и ручным дистанционным управлением по радиоканалу с возможным дублированием по гидроакустическому каналу научно-исследовательского, военного и гражданского назначения, а также к альтернативным источникам энергии - солнечным батареям на основе фотоэлектрических преобразователей.
Широкое распространение получают не только сухопутные, но и водные самоходные транспортные средства, оснащенные развитыми (т.е. с большой площадью фотоэлектрических преобразователей) солнечными батареями.
Так, известен автомобиль (Ecletic), содержащий самоходное шасси с сухопутным колесным движителем, несущим корпусом/рамой, жестко установленным/ой над ним/ней корпусным элементом, солнечную батарею, образованную крышей указанного элемента, облицованного снаружи фотоэлектрическими элементами, а также систему управления [Авто на солнечных батареях - прорыв в будущее или тупиковая ветвь? // http://mirenergii.ru/energiyasolnca/avto-na-solnechnyx-batareyax-proryv-v-budushhee-ili-tupikovaya-vetv.html].
Это - сугубо наземное сухопутное невездеходное транспортное средство, обитаемое, с ручным управлением, причем упомянутый корпусной элемент имеет коробчатую форму закрытого сверху выпуклой крышей параллелепипеда, соответственно и фотоэлектрические панели (облицовка) солнечной батареи - также выпуклая.
Таким образом, известное транспортное средство, имея ряд общих конструктивных и функциональных признаков с заявляемым устройством, не относится, тем ни менее, к категории амфибийных роботов научно-исследовательского, военного или специального назначения, а его солнечная батарея однофункциональна - используется только по своему прямому назначению.
Сюда же можно отнести и пример водного транспортного средства: известно устройство, содержащее несущий корпус с положительной плавучестью, специализированный водоходный движитель, солнечную батарею, образованную изогнутым элементом с верхней поверхностью, облицованной фотоэлектрическими элементами, и установленную на несущем корпусе выше его уровня, а также систему управления [Водный транспорт на солнечной энергии // http://topneftegaz.ru/news/view/99656 (Выложено 07.09.2011 г.)].
Это - сугубо водное транспортное средство («новая ультралегкая футуристическая и экологически чистая яхта, работающая на энергии солнца и ветра»), обитаемое, с ручным управлением, причем упомянутый изогнутый элемент двухфункционален (крыша открытого салона и одновременно основа для установки фотоэлектрических панелей солнечной батареи), имеет форму выпуклого крыла, соответственно и фотоэлектрические панели (облицовка) солнечной батареи - также выпуклая.
Таким образом, и это транспортное средство, имея ряд общих конструктивных и функциональных признаков с заявляемым устройством, не относится, тем ни менее, к категории амфибийных роботов научно-исследовательского, военного или специального назначения, а его солнечная батарея хоть и двухфункциональна, но не используется (да и не может использоваться) для создания силы плавучести (Архимедовой силы).
Известны примеры конструктивного совмещения солнечных батарей с устройствами другого назначения с целью реализации принципа двух- или многофункциональности, позволяющего получать выигрыш в массогабаритных показателях.
Далее, известны транспортные средства, в том числе вездеходные (танки), содержащие установленные на них развитые (с большой активной площадью светочувствительной поверхности) солнечные батареи, конструктивно совмещенные в одном изделии с элементами (крышками) динамической защиты [RU 2514965, МПК F41H 5/007, H01L 25/00, H02N 6/00, 12.03.2014, Бюл. №13]; облицованные фотоэлектрическими панелями крупногабаритные несущие плоские элементы, попеременно выполняющие функции парусов транспортного средства на плаву и крыльев этого же транспортного средства в воздухе [Креативный концепт транспорта-трансформера будущего // http://prointeresnoe.ru/kretivnyj-koncept-transporta-transformera-budushhego.html]; военное обмундирование с компактными солнечными батареями, конструктивно совмещенными со знаками различия на погонах [RU 2568792, МПК A41D 29/00, H01L 25/00, опубл. 20.11.2015, Бюл. №32; RU 2579340, МПК A41D 29/00, H01L 25/00, опубл. 10.04.2016, Бюл. №10]; и т.п. Однако это носит ограниченно-целевой (частный) характер и не исчерпывает всего возможного разнообразия воплощения упомянутого принципа двух- и многофункциональности.
В свою очередь, к широкому классу вездеходных транспортных средств относятся и амфибийные (плавающие) транспортные средства, способные перемещаться как по суше, так и преодолевать водные преграды, главным образом, вплавь при положительной их плавучести, у которых корпус также как минимум двухфункционален - выполняет функции несущего элемента шасси, водоизмещающего элемента (с расчетной ватерлинией на уровне корпуса ниже верхних его кромок), и др., при этом емкость корпуса (внутренний его объем) гидроизолируют снизу и предусматривают аварийное устройство откачки воды из указанной емкости [Степанов А.П. Плавающие машины. - М.: Изд-во ДОСААФ, 1975, 192 с. - с. 11, рис. 7, с. 26, рис. 14, с. 181, рис. 105].
Среди них можно обнаружить и колесный полноприводной автомобиль-амфибию с солнечной батареей на плоских подложках на выпуклой крыше обитаемого коробчатого корпуса [Н2-0: автомобиль-амфибия выставлен на eBay // http://avtomaniya.com/site/publication-full/2741].
Но в приведенном примере солнечная батарея (элементы-подложки плюс фотоэлектрические панели) - плоско-выпуклая и не является водоизмещающей (т.е. создающей силу плавучести).
Интересен с точки зрения предмета заявляемого изобретения дизайн-проект прогулочной амфибии с трансформируемой (поворотной и распускаемой веером) двухфункциональной (она же одновременно - парус) солнечной батареей, установленной на крыше коробчатого элемента с обитаемым салоном, жестко установленного на водоизмещающем шасси с сухопутно-водным колесным движителем и специализированными водоизмещающими поплавками в расчете (сомнительном, однако), что расчетная ватерлиния будет ниже уровня коробчатого элемента [Проект необычного автодома // http://camper4×4.ru/blog/yumor/274.html].
Это транспортное средство, имея ряд общих конструктивных и функциональных признаков с заявляемым устройством, хотя и относится к амфибийным, тем ни менее, не является роботом научно-исследовательского, военного или специального назначения, а его солнечная батарея хоть и двухфункциональна, но не используется (да и не может использоваться) для создания силы плавучести (Архимедовой силы).
Среди аналогов-роботов известен сугубо водный дрон с плоской частично водоизмещающей платформой (герметичным корпусом), установленной на ней также плоской солнечной батареей в виде множества фотоэлектрических преобразователей-панелей и системой управления внутри платформы, не считая наружной телескопической антенны [Четыре плавающих робота побили мировой рекорд дальности // http://nauka21vek.ru/archives/30273 (Выложено 16.03.2012 г.)].
Однако такое устройство не приспособлено для эксплуатации на суше (собственно, и такой задачи не ставилось), а солнечные батареи при такой компоновке и конфигурации надводных элементов весьма подвержены воздействию воды - как морской забортной, так и осадкам, к тому же невозможно управление углами наклона солнечной батареи в целях оптимизации ее направленности на Солнце.
Кстати, известны и другие водоизмещающие элементы, имеющие положительную плавучесть, с облицовкой фотоэлектрическими панелями, образующими солнечную батарею. В частности: подводно-надводный туристический аппарат с погруженной в воду центральной прозрачной обитаемой капсулой и прикрепленными к ней боковыми поплавками с облицовкой их верхней выпуклой поверхности фотоэлектрическими преобразователями [Подводная лодка Reef Explorer, работающая на солнечных батареях // http://be-active.com.ua/interesting/1028-reef-explorer.html]; стационарная солнечная электростанция, содержащая множество водоизмещающих поплавков типа «бакен», соединенных тросами или иной гибкой связью друг с другом, с якорем и индивидуальными подводными грузами-стабилизаторами, с облицовкой надводной выпуклой части поверхности фотоэлектрическими преобразователями [Солнечные батареи Marine Solar Cells на плаву // www.marineinsight.com (Выложено 14.11.2011 г.)].
Однако ни то, ни другое из этих устройств не относится к категории амфибийных роботов научно-исследовательского, военного или специального назначения, а их солнечные батареи хоть и двухфункциональны (если водоизмещающие поплавки относить к составной части солнечной батареи наряду с фотоэлектрическими преобразователями), но в первом примере солнечные батареи расположены на уровне несущего корпуса, во втором примере отсутствует система управления, а солнечные батарее в обоих примерах подвержены интенсивному воздействию водной стихии.
Близким к заявляемому устройству по назначению и количеству общих существенных конструктивных признаков аналогом является амфибийное транспортное средство («Автобус-амфибия с ветроэнергетической установкой и солнечной батареей»), содержащее самоходное шасси с универсальным сухопутно-водоходным движителем (колеса с выдвижными лопастями) и несущей рамой, элемент-кузов, солнечную батарею, установленную на элементе-кузове выше его уровня (на крыше), а также систему управления с питанием от буферного электрического аккумулятора [RU 2006111355, МПК D60K 1/00, 10.11.2007].
Транспортное средство выполнено амфибийным, с положительной плавучестью и водозащитным исполнением шасси, при сохранении работоспособности солнечной батареи и транспортного средства в целом на плаву.
Однако с обитаемым коробчатым элементом - кузовом и неподвижным креплением солнечной батареи относительно рамы шасси, а расчетная ватерлиния находится явно гораздо ниже солнечной батареи, т.е. не используется объем, занимаемый солнечной батареей, для создания силы плавучести (Архимедовой силы).
Наиболее близким к заявляемому устройству по назначению и количеству общих существенных конструктивных признаков аналогом (прототипом) является вездеходный транспортный робот - подвижная научно-исследовательская лаборатория с возможностью ручного дистанционного управления («Луноход»), содержащий самоходное шасси, по крайней мере, с сухопутным движителем (который в принципе может использоваться и как водоходный, но неспециализированно-водоходным, малоэффективным) и несущим корпусом, солнечную батарею, образованную чашеобразным элементом с вогнутой поверхностью, облицованной фотоэлектрическими элементами, и поворотно относительно несущего корпуса установленную на несущем корпусе выше его уровня, а также систему управления с питанием от буферного электрического аккумулятора [Автоматические станции для изучения поверхностного покрова Луны / А.Л. Кемурджиан, В.В. Громов, И.И. Черкасов, В.В. Шварев. - М.: Машиностроение, 1976, 200 с. - С. 108-111].
Однако он выполнен сухопутным (не амфибийным). Если в конкретном практическом (и историческом) приложении «Луноход-1» и «Луноход-2» и не «нуждались» в амфибийных свойствах (плавучести, ходкости, маневренности и живучести на плаву) по причине отсутствии воды на Луне, то для других вероятных вездеходных транспортных роботов и, прежде всего, наземных, имя которым легион (научно-исследовательского, военного и специального назначения), отсутствие свойств амфибии может являться весьма существенным недостатком всего робототехнического комплекса.
При этом в нем отсутствуют устройство горизонтирования чашеобразного элемента солнечной батареи, аварийное водооткачивающее устройство, гидроизоляция чашеобразного элемента снизу от внутреннего свободного объема несущего корпуса шасси, специализированный водоходный движитель.
Отсюда (по совокупности) - констатация недостаточно высоких технико-эксплуатационных/тактико-технических характеристик известного устройства-прототипа в расширительном смысле.
Таким образом, известное устройство, принятое за прототип, еще недостаточно совершенно по своим технико-эксплуатационным (тактико-техническим) характеристикам.
Задача, на решение которой направлено заявляемое изобретение, заключается в повышении технико-эксплуатационных (тактико-технических) характеристик вездеходного транспортного робота за счет, прежде всего, расширения функционального назначения чашеобразного элемента солнечной батареи, с целью обеспечения положительной плавучести всего робота при сохранении работоспособности.
Решение поставленной задачи достигается тем, что вездеходный транспортный робот (с возможностью ручного дистанционного управления и оперативного перепрограммирования), содержащий самоходное шасси, по крайней мере, с сухопутным движителем и несущим корпусом, солнечную батарею, образованную чашеобразным элементом с вогнутой поверхностью, облицованной фотоэлектрическими элементами, и поворотно относительно несущего корпуса установленную на несущем корпусе выше его уровня, а также систему управления с питанием от буферного электрического аккумулятора, выполнен амфибийным с положительной плавучестью, водозащитным исполнением шасси и расчетной ватерлинией на уровне чашеобразного элемента солнечной батареи ниже верхнего его края, то есть с использованием части объема солнечной батареи для создания силы плавучести транспортного робота при сохранении работоспособности солнечной батареи и всего робота на плаву.
В порядке решения поставленной задачи заявляемое устройство может характеризоваться следующими совокупностями дополнительных конструктивных признаков (при сформулированной выше основной совокупности признаков):
- вездеходный транспортный робот может быть снабжен устройством горизонтирования чашеобразного элемента солнечной батареи (это позволяет не только свести к минимуму вероятность притопления чашеобразного элемента с солнечной облицовкой/солнечными панелями на плаву, обусловленного возможным креном и/или дифферентом чашеобразного элемента, но и поднять высоту расчетной ватерлинии в обеспечение большей силы плавучести транспортного робота в целом);
- при указанной выше совокупности признаков, устройство горизонтирования чашеобразного элемента солнечной батареи может быть выполнено в виде следящего электромеханического привода (это позволяет оперативно изменять углы взаимного положения корпуса/рамы шасси и чашеобразного элемента с солнечной облицовкой/солнечными панелями при входе в воду, особенно крутым берегом, и выходе из воды, крене и дифференте на плаву в любом направлении);
- внутренний свободный объем чашеобразного элемента солнечной батареи может быть гидроизолирован от внутреннего свободного объема несущего корпуса шасси (это позволяет исключить в штатном режиме эксплуатации притопление солнечной батареи и связанного с этим уменьшения запаса плавучести транспортного робота);
- вездеходный транспортный робот может быть дополнительно снабжен аварийным водооткачивающим устройством на основе насоса, с возможностью принудительного удаления воды из внутреннего свободного объема чашеобразного элемента солнечной батареи (это позволяет оперативно удалять воду с солнечных панелей в аварийном режиме притопления солнечной батареи);
- вездеходный транспортный робот может быть дополнительно снабжен сливным клапаном в районе нижней точки пустого объема чашеобразного элемента солнечной батареи, с возможностью ручного и/или дистанционного его открытия/закрытия (это позволяет избежать притопления солнечной батареи жидкими осадками сверху или воздействия конденсата);
- вездеходный транспортный робот может быть дополнительно снабжен водоходным движителем (это повышает водоходные качества транспортного робота как амфибии - ходкость, маневренность и др.).
Таким образом, показана причинно-следственная связь между существенными признаками заявляемого устройства и техническим результатом от использования этого устройства.
Среди известных устройств не обнаружены такие, совокупность существенных признаков которых совпадала бы с заявленной. В то же время, именно за счет последней достигается новый технический результат в соответствии с поставленной задачей.
Основную изобретательскую идею заявляемого технического решения можно сформулировать, иными словами, так: предлагается конструктивно и функционально объединить в одном имеющемся у прототипа устройстве (фрагменте), а именно - открытом сверху чашеобразном (в частности, «параболическом») теле, во-первых, «остронаправленную» солнечную батарею, и, во-вторых, эффективно водоизмещающую емкость (с характерной для плавсредств стереометрической формой, обеспечивающей положительную плавучесть). Соответственно, имеет место «сверхэффект» в патентоведческом понимании этого термина и наличие изобретательского уровня заявляемого технического предложения (неочевидность для специалистов из достигнутого уровня науки и техники).
Заявляемое устройство пояснено на чертежах:
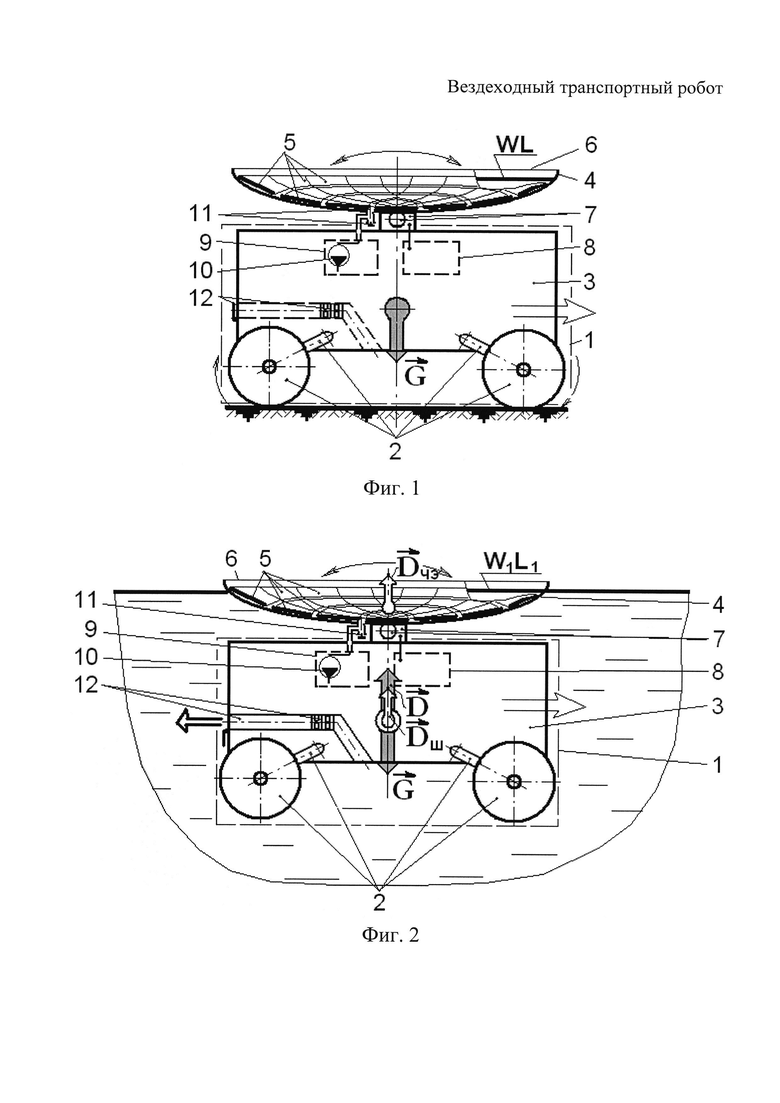
на фиг. 1 упрощенно, частично схематически показан амфибийный транспортный робот, вид сбоку на суше, где WL - расчетная ватерлиния;
на фиг. 2 - то же, на плаву, где W1L1 - действующая ватерлиния; G - вес транспортного средства; D - сила плавучести транспортного робота, в том числе Dш - доля шасси в силе плавучести, Dчэ - доля чашеобразного элемента солнечной батареи.
Вездеходный транспортный робот содержит самоходное шасси 1, по крайней мере, с сухопутным движителем 2 (который может, в принципе, быть одновременно и водоходным, что свойственно, например, колесным, колесно-шагающим, гусеничным и др.) и несущим корпусом 3 (или несущей рамой 3, что не принципиально).
На корпусе (раме) 3 установлен чашеобразный (в частности, с параболической формой в вертикальном сечении) элемент (ЧОЭ) 4 из водонепроницаемого материала (металл, пластик или др.), с размещенными в нем (по вогнутой поверхности) фотоэлектрическими панелями 5, с образованием развитой солнечной батареи 4-5. При этом элемент 4 установлен выше уровня несущего корпуса (рамы) 3 и может быть горизонтален (по верхнему краю 6) при горизонтальности корпуса (рамы) 3.
Принципиально, что транспортный робот выполнен амфибийным, с положительной плавучестью (и запасом плавучести), водозащитным исполнением шасси 1 и расчетной ватерлинией WL (см. фиг. 2) на уровне солнечной батареи 4-5, точнее - ее чашеобразного элемента 4 ниже верхнего его края 6, то есть с использованием части объема чашеобразного элемента 4 солнечной батареи 4-5 для создания добавочной выталкивающей (Архимедовой) силы Dчэ к выталкивающей (Архимедовой) силе Dш шасси в обеспечение силы плавучести D=Dчэ+Dш шасси транспортного робота в целом при сохранении работоспособности солнечной батареи 4-5 (панелей 5 в их электрической взаимосвязи) и робота в целом в режиме его эксплуатации на плаву.
Положение WL на ЧОЭ 4 обеспечивают на этапе проектирования (конструкторской проработки) подбором массогабаритных характеристик составных частей на основе уравнения плавучести:
G=ρ⋅g⋅(Dш+Dчэ),
где ρ⋅ - плотность забортной воды; g - ускорение свободного падения.
Дальнейшее описание устройства относится к дополнительным заявляемым признакам, которые необязательны, но рациональны и потому рекомендуются к использованию.
Вездеходный транспортный робот может быть снабжен устройством 7 горизонтирования чашеобразного элемента 4, а значит, - солнечной батареи 4-5 в целом.
В частности, устройство 7 может представлять собой быстродействующий следящий электромеханический привод, работающий от электрического аккумулятора (в том числе буферного) 8, при солнечной батареи 4-5 (панели 5).
Внутренний свободный объем чашеобразного элемента 4 гидроизолирован не только от водной среды снизу-сбоку (что обязательно для водоизмещающего тела и оговорено признаком «водонепроницаемые стенки»), но может быть гидроизолирован также и от внутреннего свободного объема несущего корпуса 3 шасси 1 известными в инженерном деле средствами, например резиновым уплотнением 9 (см. фиг. 1, 2).
Транспортный робот может быть дополнительно снабжен аварийным водооткачивающим устройством 9 на основе жидкостного (водяного) насоса 10 с возможностью принудительного удаления воды из внутреннего свободного объема чашеобразного элемента 4 в случае притопления или осадков сверху.
Что касается упомянутых осадков, то, во избежание скопления жидких осадков в элементе 4, конкретно - в районе нижней точки пустого (открытого) объема чашеобразного элемента 4, рекомендуется предусмотреть сливной клапан 11 с ручным и/или дистанционным открытием/закрытием.
При этом может быть задействованы как естественное гравитационное поле, так и упомянутое устройство 9-10 путем его параллельного подключения к отсасывающей магистрали.
Транспортный робот может быть дополнительно снабжен специализированным водоходным движителем 12, например водометами или винтами с соответствующими приводами на корме слева и справа (см. фиг. 1, 2).
Заявленное устройство работает следующим образом.
При эксплуатации на суше (основные эксплуатационные условия) робот покоится или перемещается на шасси 1 (см. фиг. 1) за счет сухопутного (колесного) движителя 2, пребывающего в силовом взаимодействии с грунтом. При этом ЧОЭ 4 либо находится в исходном ровном положении (без наклона относительно корпуса/рамы 3 шасси 1), либо принудительно наклонен в сторону Солнца (для это может быть использовано, в принципе, и устройство 7) для большей эффективности использования солнечной энергии для ее преобразования в электрическую и передачи в буферный аккумулятор 8 для дальнейшего использования бортовыми устройствами-потребителями электроэнергии, в том числе двигателями(двигателем) движителя 2 в составе шасси 1. Сливной клапан 11 в ЧОЭ 4, как правило, открыт, вследствие чего возможные влажные осадки и конденсат удаляются автоматически под действием сил гравитации или принудительно за счет откачивающего устройства 9 с насосом 10. Имеется возможность слива воды из ЧОЭ 4 и путем его наклона за счет устройства 7.
При преодолении водной преграды (неосновные, временные эксплуатационные условия) робот перемещается в морской или пресной воде (см. фиг. 2) за счет либо специализированного водоходного движителя 12, либо сухопутного (колесного) движителя 2, либо того и другого, пребывающих в силовом взаимодействии с окружающей средой, главным образом водной стихией. При этом рекомендуется использовать заранее запасенную в достаточном для преодоления водной преграды и выхода на противоположный берег количестве электроэнергию в аккумуляторе 8, поскольку на плаву робот лишен возможности наклона ЧОЭ 4 на существенные углы при низком положении Солнца. Динамика и кинематика перемещения робота на плаву не содержит чего-либо ранее неизвестного в физике, в теории и практике взаимодействия «амфибия - водная преграда» (см. упомянутый в обзоре аналогов источник Степанов А.П.…]. Чашеобразная форма элемента 4 затрудняет волнообразование как функцию скорости движения робота.
Робот погружен в воду (действующая ватерлиния W1L1 на фиг. 2), в идеале, по расчетную ватерлинию WL на уровне ЧОЭ 4 (см. фиг. 1) ниже края 6 (в обеспечение заданного запаса плавучести), но с образованием добавочной выталкивающей (Архимедовой) силы Dчэ к выталкивающей (Архимедовой) силе Dш шасси в обеспечение силы плавучести D=Dчэ+Dш шасси транспортного робота в целом.
При дифференте и крене шасси 1 в динамике робота устройство 9 автоматически отслеживает (как и надлежит следящему приводу), например по показаниям продольного и поперечного уровней, горизонтальное положение ЧОЭ 4.
Клапан 11 закрыт и не пропускает забортную воду во внутреннее пространство ЧОЭ 4, а при притоплении его фотоэлектрической облицовки 5 осадками или конденсатом включается (включают) насос 10 и жидкость через заборное отверстие устройства 9 удаляется за борт ЧОЭ 4. Аналогично удаляется (удаляют) воду, по той или иной причине (превышение высоты волн, качка при отказе стабилизатора-устройства 7 горизонтирования ЧОЭ 4 и др.) захлестнувшую через край 6 ЧОЭ 4.
Не исключены другие устройства (варианты) в рамках заявляемых совокупностей существенных признаков.
Выбор конкретного варианта из предложенных при использовании изобретения зависит от спектра тактико-технических и экономических требований и производится в каждом конкретном случае.
Разработка не претендует на полное замещение такими устройствами близких аналогов. Устройство предназначено для ограниченного применения там, где может дать максимальную эффективность.
Использование изобретения позволяет повысить (улучшить) технико-эксплуатационные (тактико-технические) характеристики вездеходного транспортного робота за счет, прежде всего, расширения функционального назначения чашеобразного элемента солнечной батареи с целью обеспечения положительной плавучести всего робота при сохранении работоспособности.
| название | год | авторы | номер документа |
|---|---|---|---|
| Трёхсредный мобильный аппарат "Этажерка" | 2019 |
|
RU2706748C1 |
| АМФИБИЯ-ТРАНСФОРМЕР "АКВА" | 2010 |
|
RU2448844C1 |
| АМФИБИЙНАЯ МАШИНА | 2008 |
|
RU2406619C2 |
| АМФИБИЙНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2014 |
|
RU2577504C1 |
| Мультиагентная робототехническая система | 2017 |
|
RU2658684C1 |
| МАЛОРАЗМЕРНЫЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С ВОЗМОЖНОСТЬЮ ПЕРЕМЕЩЕНИЯ ПО ПОВЕРХНОСТИ ЗЕМЛИ | 2023 |
|
RU2807493C1 |
| ПЛАВСРЕДСТВО ДЛЯ ОБОРУДОВАНИЯ АМФИБИЙНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2015 |
|
RU2605136C1 |
| Способ буксировки транспортного средства с изменяемым дорожным просветом на грунтах с низкой несущей способностью | 2020 |
|
RU2727219C1 |
| ВОДОИЗМЕЩАЮЩИЙ КОРПУС ГУСЕНИЧНОЙ АМФИБИЙНОЙ МАШИНЫ | 2014 |
|
RU2558157C1 |
| Амфибия на гусеничном движителе | 2020 |
|
RU2727422C1 |
Изобретение относится к амфибийным транспортным средствам научно-исследовательского, военного и специального назначения, электрифицированным с использованием бортовой солнечной батареи и буферного электрического аккумулятора. Вездеходный транспортный робот содержит самоходное шасси, по крайней мере, с сухопутным движителем и несущим корпусом, солнечную батарею, образованную чашеобразным элементом с вогнутой поверхностью, облицованной фотоэлектрическими элементами, и поворотно относительно несущего корпуса установленную на несущем корпусе выше его уровня, а также систему управления с питанием от буферного электрического аккумулятора. Робот выполнен амфибийным с положительной плавучестью, с водозащитным исполнением шасси и расчетной ватерлинией на уровне чашеобразного элемента солнечной батареи ниже верхнего его края, то есть с использованием части объема солнечной батареи. Достигается возможность плавучести робота при сохранении работоспособности. 6 з.п. ф-лы, 2 ил.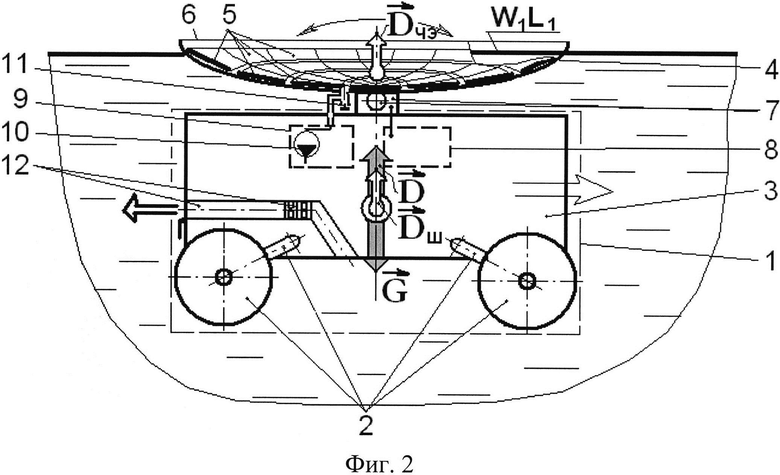
1. Вездеходный транспортный робот, содержащий самоходное шасси, по крайней мере, с сухопутным движителем и несущим корпусом, солнечную батарею, образованную чашеобразным элементом с вогнутой поверхностью, облицованной фотоэлектрическими элементами, и поворотно относительно несущего корпуса установленную на несущем корпусе выше его уровня, а также систему управления с питанием от буферного электрического аккумулятора, отличающийся тем, что он выполнен амфибийным с положительной плавучестью, водозащитным исполнением шасси и расчетной ватерлинией на уровне чашеобразного элемента солнечной батареи ниже верхнего его края, то есть с использованием части объема солнечной батареи для создания силы плавучести транспортного робота при сохранении работоспособности солнечной батареи и робота в целом на плаву.
2. Вездеходный транспортный робот по п.1, отличающийся тем, что он снабжен устройством горизонтирования чашеобразного элемента солнечной батареи.
3. Вездеходный транспортный робот по п.2, отличающийся тем, что устройство горизонтирования чашеобразного элемента солнечной батареи выполнено в виде следящего электромеханического привода.
4. Вездеходный транспортный робот по п.1, отличающийся тем, что внутренний свободный объем чашеобразного элемента солнечной батареи гидроизолирован от внутреннего свободного объема несущего корпуса шасси.
5. Вездеходный транспортный робот по п.1, отличающийся тем, что он дополнительно снабжен аварийным водооткачивающим устройством на основе насоса с возможностью принудительного удаления воды из внутреннего свободного объема чашеобразного элемента солнечной батареи.
6. Вездеходный транспортный робот по п.1, отличающийся тем, что он дополнительно снабжен сливным клапаном в районе нижней точки внутреннего свободного объема чашеобразного элемента солнечной батареи с возможностью ручного и/или дистанционного его открытия/закрытия.
7. Вездеходный транспортный робот по п.1, отличающийся тем, что он дополнительно снабжен водоходным движителем.
| RU 2006111355 A, 10.11.2007 | |||
| УНИВЕРСАЛЬНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ В ПРОСТРАНСТВЕ | 2009 |
|
RU2411139C1 |
| US 2012290164 A1, 15.11.2012 | |||
| CN 102616096 A, 01.08.2012. | |||

