Изобретение относится к области летательных аппаратов, конкретнее к области мультикоптеров и области наземных беспилотных аппаратов, обладающих возможностью перемещения в воздушной и наземной средах.
Известно трехсредное транспортное средство, которое содержит кабину летчика и пассажирскую кабину, заднюю винтомоторную установку, убирающиеся передние и задние колеса шасси, складывающиеся в правую и левую плоскости крыла с хвостовой частью при помощи тросовых механизмов для образования наземного транспортного средства. Основное шасси расположено в центре фюзеляжа и состоит из двух убирающихся ног с парами колес. Плоскости крыла снабжены передними и задними подкосами, винтомоторными установками, расположенными в передней части центральных секций крыла на удлиненных кронштейнах и способными принимать горизонтальное или вертикальное положение. Двухкилевая хвостовая часть с боковых сторон на поворотных кронштейнах имеет по винтомоторной установке, выполненной с возможностью принимать вертикальное или горизонтальное положение. Обеспечивается возможность передвижения по грунту, воде и воздуху с вертикальным взлетом и посадкой, а также по автомобильным дорогам и территориям населенных пунктов [патент РФ №2743310, B60F 5/02, опубл. 17.02.2021].
Недостатками аналога являются высокая масса, обусловленная большим количеством ведущих колес, невысокая надежность, обусловленная высокой степенью механизации хвостовой части и пары убирающихся колес, а также необходимость нахождения пилота на борту аппарата.
Известен автоплан, содержащий корпус, двигатель, устройство управления и ходовую часть. В верхней и нижней частях корпуса расположены верхний и нижний боксы, внутри которых размещены винтовые крыльчатки с взаимно противоположным вращением. По периметру боксов установлен по меньшей мере один ряд крыльев с регулируемым углом атаки. Верхний и нижний боксы соединены между собой соплом Лаваля. В другом варианте корпус содержит бокс, внутри которого расположены как минимум три крыльчатки, при этом нижняя крыльчатка вращается в противоположную сторону от других. По периметру бокса расположены, по меньшей мере три ряда крыльев с регулируемым углом атаки [патент №2746285, B60F 5/02, опубл. 19.10.2020].
Недостатками аналога являются невысокая надежность, обусловленная высокой степенью механизации, высокая масса, обусловленная наличием редуктора несущих винтов, двигателя внутреннего сгорания, коробки передач, а также недостаточная динамика, ограниченная характеристиками двигателя внутреннего сгорания, а также необходимость нахождения пилота на борту аппарата.
Известен автолет (летающий автомобиль), содержащий несущие одиночные или соосные винты в кольце, газотурбинные двигатели, вращающие несущие винты, электродвигатель, необходимый для перемещения по земле, гибридную систему управления, электрогенераторы. Несущие винты расположены в передней и задней частях корпуса. Несущие винты закрыты жалюзи, которые установлены перпендикулярно салону. Автолет также содержит систему управления и систему управления несущими винтами. Несущие винты содержат автоматы перекоса, электроприводы, электронные устройства, встроенные в электроприводы, бортовой компьютер, редукторы, газотурбинные двигатели. На несущих винтах выполнены соответствующие закрылки для перемещения вперед-назад, влево-вправо. Автолет содержит ускорители для полета вперед, выполненные в виде винтов в кольце и компактных реактивных двигателей. Обеспечиваются возможность перемещения в воздухе и по земле, вертикальный взлет, снижение расхода топлива [патент №2662600, B60F 5/02, опубл. 26.07.2018].
Недостатками аналога являются высокие масса и габариты, невысокая надежность, обусловленные наличием одновременно трех типов двигателей и трех типов источников энергии.
Известен вездеходный транспортный робот, содержащий самоходное шасси, по крайней мере, с сухопутным движителем и несущим корпусом, солнечную батарею, образованную чашеобразным элементом с вогнутой поверхностью, облицованной фотоэлектрическими элементами, и поворотно относительно несущего корпуса установленную на несущем корпусе выше его уровня, а также систему управления с питанием от буферного электрического аккумулятора. Робот выполнен амфибийным с положительной плавучестью, с водозащитным исполнением шасси и расчетной ватерлинией на уровне чашеобразного элемента солнечной батареи ниже верхнего его края, то есть с использованием части объема солнечной батареи. Достигается возможность плавучести робота при сохранении работоспособности [патент №2615808, B60F 3/00, B60K 16/00, опубл. 11.04.2017].
Недостатками аналога являются отсутствие функции полета и большие габариты, обусловленные большим объемом транспортного робота, необходимого для обеспечения работы в наводном режиме.
Известен гибридный воздухоплавательный аппарат, предназначенный для передвижения по бездорожью, воде и воздуху, который включает электромобиль с колесами повышенной проходимости, квадрокоптер и газовые емкости, создающие подъемную силу вместе с авиационными движителями квадрокоптера. Газовые емкости выполнены в виде сильфонов, изменяющих объем газа с помощью натяжных устройств. Днище электромобиля выполнено в форме днища водоплавающего судна, что улучшает движение аппарата по воде. На дне электромобиля расположены резервные газовые емкости избыточного давления. Колеса электромобиля имеют обод и диск из алюминия, а также шины, заполненные легким газом. Изобретение направлено на расширение арсенала технических средств [патент РФ №2752039, B60F 5/02, B64B 1/06, B64B 1/68, опубл. 01.10.2019].
Недостатками аналога являются необходимость нахождения пилота на борту аппарата и невысокая безопасность полета, обусловленная обеспечением полета за счет применения емкостей с газом.
Задача и технический результат изобретения – расширение функциональных возможностей беспилотного летательного аппарата за счет обеспечения возможности перемещения по суше без нахождения пилота на борту аппарата, а также снижение размеров летательного аппарата.
Поставленная задача решается, а технический результат достигается тем, что малоразмерный беспилотный летательный аппарат с возможностью перемещения по поверхности земли, содержит силовую раму, состоящую из двух нижних пластин, верхней пластины, двух передних стоек, соединяющих верхнюю и нижнюю пластину, двух передних лучей, задней стойки, двух задних лучей, при этом два передних луча и нижний луч закреплены между двумя нижними пластинами, верхний задний луч закреплен к верхней пластине;
на конце каждого переднего луча сверху закреплен маршевый электродвигатель для вращения авиационного винта, а снизу с помощью уголка тяговый электродвигатель, на ось которого смонтирована шина, образующие передние колеса для движения по поверхности земли, на конце нижнего заднего луча с помощью кронштейна, подшипника кронштейна, вилки, оси закреплено заднее колесо, включающее подшипник колеса, диск, шину;
на верхней пластине закреплены контроллер, а также электрически соединенные с ним регуляторы оборотов маршевых электродвигателей, регулятор оборотов тяговых электродвигателей, приемник, а также на верхней пластине смонтировано крепление для устройства съемки и передачи видеоизображения;
в полости силовой рамы закреплен аккумулятор, электрически соединенный с контроллером.
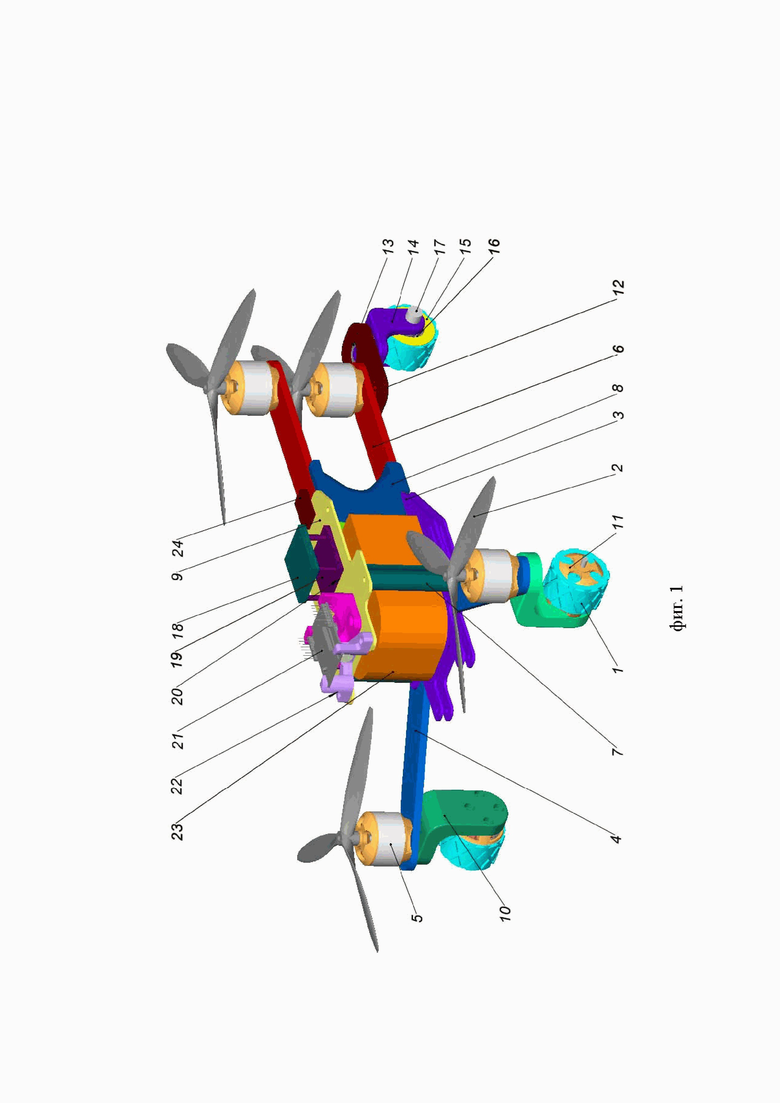
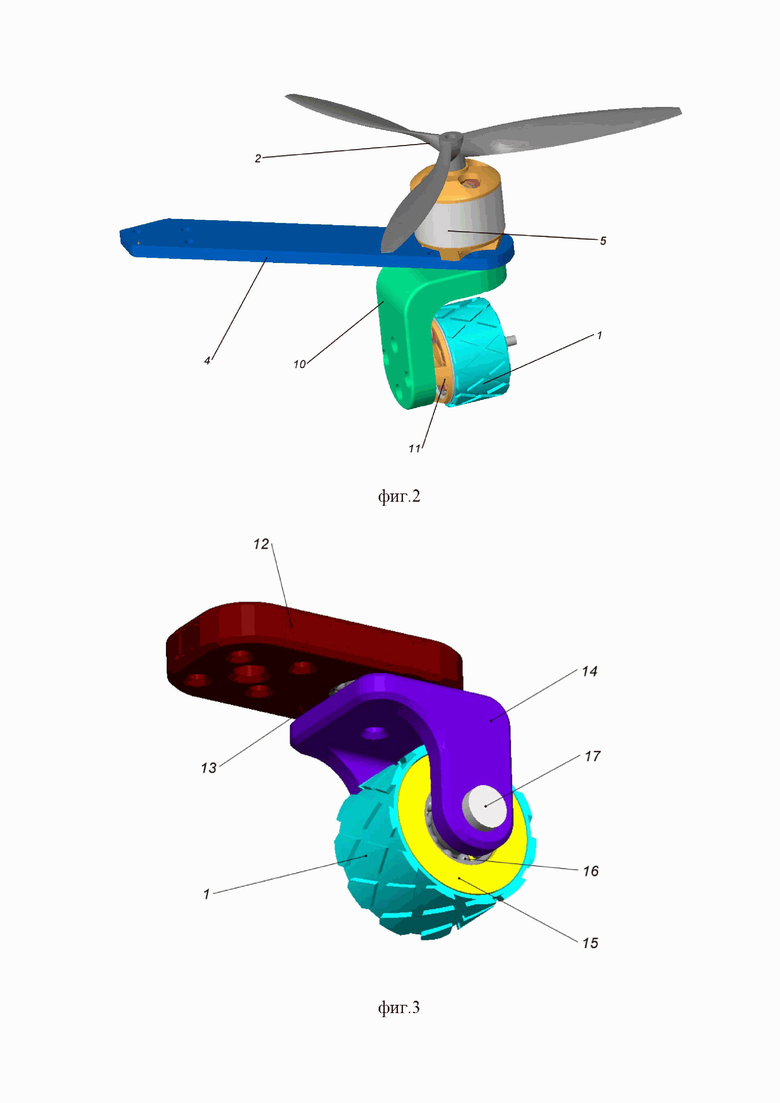
Сущность изобретения поясняется чертежами. На фиг.1 представлен малоразмерный беспилотный летательный аппарат с возможностью перемещения по поверхности земли в общем виде, на фиг. 2 представлен передний приводной блок малоразмерного беспилотного летательного аппарата, с возможностью перемещения по поверхности земли, на фиг. 3 представлен механизм заднего свободноповоротного колеса малоразмерного беспилотного летательного аппарата с возможностью перемещения по поверхности земли.
Малоразмерный беспилотный летательный аппарат с возможностью перемещения по поверхности земли состоит из трех шин 1, четырех авиационных винтов 2, двух нижних пластин 3, двух передних лучей 4, четырех маршевых электродвигателей 5, двух задних лучей 6, двух передних стоек 7, задней стойки 8, верхней пластины 9, двух уголков 10, двух тяговых электродвигателей 11, заднего кронштейна 12, подшипника кронштейна 13, вилки 14, диска 15, двух подшипников колеса 16, оси 17, контроллера 18, регулятора оборотов маршевых электродвигателей 19, двух регуляторов оборотов тяговых электродвигателей 20, устройства съемки и передачи видеоизображения 21, крепления 22, аккумулятора 23, приемника 24.
Между двумя нижними пластинами 3 закреплены два передних луча 4 с помощью резьбовых соединений. Между двумя нижними пластинами 3 закреплен нижний задний луч 6 с помощью резьбовых соединений. Две передние стойки 7 прикреплены к нижним пластинам 3 с помощью резьбового соединения. Задняя стойка 8 прикреплена к нижним пластинам 3 с помощью резьбового соединения. Задний луч 6 закреплен между верхней пластиной 9 и задней стойкой 8 с помощью резьбовых соединений. Верхняя пластина 9 прикреплена к двум передним стойкам 7 с помощью резьбовых соединений. Две нижние пластины 3, две передние стойки 7, задняя стойка 8, два передних луча 4, два задних луча 6, верхняя пластина 9 вместе образуют силовую раму малоразмерного беспилотного летательного аппарата с возможностью перемещения по поверхности земли. Нижние пластины 3, верхняя пластина 9, передние лучи 4, задние лучи 6 могут быть выполнены из металла, пластмассы, композитного материала или стеклотекстолита. Передние стойки 7, задняя стойка 8 и уголки 10 могут быть выполнены из металла, пластмассы, композитного материала или стеклотекстолита.
Уголок 10 и маршевый электродвигатель 5 установлены на переднем луче 4 с помощью резьбовых соединений. К одному переднему лучу 4 крепится один маршевый электродвигатель 5 и один уголок 10. Авиационный винт 2 прикреплен к маршевому электродвигателю 5 с помощью резьбового соединения или за счет посадки с натягом. Авиационные винты 2 могут быть выполнены из пластмассы или композитного материала. К уголку 10 прикреплен тяговый электродвигатель 11 с помощью резьбовых соединений. Покрышка 1 закреплена на тяговом электродвигателе 11 посредством соединения с натягом. Покрышки 1 выполняются из мягкой пластмассы или резины.
Задний кронштейн 12 прикреплен к заднему лучу 6 с помощью резьбового соединения. К заднему кронштейну 12 прикреплен подшипник кронштейна 13 с помощью соединения с натягом. К подшипнику кронштейна 13 прикреплена вилка 14 с помощью резьбового соединения. Диск 15 прикреплен к вилке 14 через ось 17 с помощью резьбового соединения. Ось 17 соединена с вилкой 14 за счет посадки с натягом, резьбового соединения или клеевого соединения. К диску 15 прикреплены два подшипника колеса 16 с помощью соединения с натягом. К диску 15 прикреплена покрышка 1 с помощью соединения с натягом. Диск 15, покрышка 1 и подшипники колеса 16 вместе образуют заднее колесо. Задний кронштейн 12, вилка 14, диск 15 и ось 17 могут быть выполнены из металла, пластмассы или композитного материала.
К верхней пластине 9 прикреплен контроллер 18 с помощью резьбового соединения. Контроллер 18 электрически соединен с регуляторами оборотов маршевых электродвигателей 19. Регулятор оборотов маршевых электродвигателей 19 присоединен к силовой раме с помощью резьбового или клеевого соединения и электрически соединен с маршевыми электродвигателями 5. Регуляторы оборотов тяговых электродвигателей 20 электрически соединены с контроллером 18. Регуляторы оборотов тяговых электродвигателей 20 электрически соединены с тяговыми электродвигателями 11. Регуляторы оборотов тяговых электродвигателей 20 прикреплены к силовой раме с помощью резьбового или клеевого соединения. Крепление 22 присоединено к силовой раме. Крепление 22 может быть выполнено из пластмассы или композитного материала. Устройство съемки и передачи видеоизображения 21 закреплено в креплении 22 и электрически соединено с контроллером 18. Аккумулятор 23 устанавливается в полость силовой рамы. Аккумулятор 23 электрически соединен с контроллером 18, с регулятором оборотов маршевых электродвигателей 19 и регуляторами оборотов тяговых электродвигателей 20. Приемник 24 крепится на верхнюю пластину 9 с помощью клеевого или резьбового соединения. Приемник 24 электрически соединяется с контроллером 18. Для защиты оборудования малоразмерного беспилотного летательного аппарата с возможностью перемещения по поверхности земли на силовую раму может быть прикреплен при помощи резьбового соединения или посадки с натягом защитный корпус, выполненный из пластмассы или композитного материала.
Малоразмерный беспилотный летательный аппарат, с возможностью перемещения по поверхности земли, в режиме полета функционирует следующим образом. С пульта управления оператора на приемник 24 подаются сигналы управления, сформированные в зависимости от желаемого направления и скорости полета. Приемник 24 получает сигналы управления и передает их в контроллер 18. Контроллер 18 получает информацию от приемника 24, обрабатывает, преобразует и передает сигнал на регуляторы оборотов маршевых электродвигателей 19 в зависимости от желаемого направления и скорости полета. На вход регуляторов оборотов маршевых электродвигателей 19 подается постоянное напряжение с аккумулятора 23. Регуляторы оборотов маршевых электродвигателей 19 подают переменное трехфазное напряжение на маршевые электродвигатели 5, в результате чего происходит вращение авиационных винтов 2 с необходимой скоростью для осуществления полета, в необходимом направлении с необходимой скоростью. От контроллера 18, в котором встроенные понижающие стабилизаторы напряжения, подается постоянное напряжение на устройство съемки и передачи видеоизображения 21. От контроллера 18 на устройство съемки и передачи видеоизображения могут передаваться данные телеметрии, которые могут накладываться на изображение, передаваемое устройством съемки и передачи видеоизображения 21. Устройство съемки и передачи видеоизображения 21 передает изображение или изображение с наложенными на него данными телеметрии на периферийное оборудование, на котором отображается видеоизображение для оператора.
Малоразмерный беспилотный летательный аппарат с возможностью перемещения по поверхности земли в наземном режиме функционирует следующим образом. С пульта управления оператора на приемник 24 подаются сигналы управления, сформированные в зависимости от желаемого направления и скорости наземного перемещения. Приемник 24 получает сигналы управления и передает их в контроллер 18. Контроллер 18 получает информацию от приемника 24, обрабатывает, преобразует и передает сигнал на регуляторы оборотов тяговых электродвигателей 20, в зависимости от желаемого направления и скорости наземного перемещения. На вход регуляторов оборотов тяговых электродвигателей 20 подается постоянное напряжение с аккумулятора 23. Регуляторы оборотов тяговых электродвигателей 20 подают переменное трехфазное напряжение на тяговые электродвигатели 11, в результате чего происходит вращение шин 1 с необходимой скоростью для осуществления наземного перемещения в необходимом направлении с необходимой скоростью. Заднее колесо при этом свободно вращается за счет механически закрепленной в подшипнике кронштейна 13 вилки 14. От контроллера 18, в котором встроенные понижающие стабилизаторы напряжения, подается постоянное напряжение на устройство съемки и передачи видеоизображения 21. От контроллера 18 на устройство съемки и передачи видеоизображения могут передаваться данные телеметрии, которые могут накладываться на изображение, передаваемое устройством съемки и передачи видеоизображения 21. Устройство съемки и передачи видеоизображения 21 передает изображение или изображение с наложенными на него данными телеметрии на периферийное оборудование, на котором отображается видеоизображение для оператора.
Таким образом, заявленное изобретение позволяет обеспечить перемещение в двух средах за счет использования на беспилотном летательном аппарате узлов для осуществления наземного перемещения.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАЛОРАЗМЕРНЫЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТОЛЕТНОГО ТИПА | 2023 |
|
RU2802879C1 |
| БЕСПИЛОТНОЕ ВОЗДУШНОЕ СУДНО МУЛЬТИРОТОРНОГО ТИПА (БВС) ДЛЯ ТРАНСПОРТИРОВКИ МАЛОГАБАРИТНЫХ ГРУЗОВ | 2023 |
|
RU2823830C1 |
| МАЛОРАЗМЕРНЫЙ БЕСПИЛОТНЫЙ ВЕРТОЛЕТ БЕЗ АВТОМАТА ПЕРЕКОСА | 2023 |
|
RU2820276C1 |
| Беспилотный летательный аппарат вертикального взлёта и посадки и способ его изготовления | 2023 |
|
RU2819460C1 |
| МНОГОВИНТОВОЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2014 |
|
RU2567496C1 |
| АЭРОПОЕЗД С ПИТАНИЕМ ОТ ТРОЛЛЕЯ (ВАРИАНТЫ) | 2018 |
|
RU2692345C1 |
| УНИВЕРСАЛЬНЫЙ МНОГОФУНКЦИОНАЛЬНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ КВАДРОКОПТЕРНОГО ТИПА | 2024 |
|
RU2835704C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ РЕТРАНСЛЯЦИИ СИГНАЛОВ | 2023 |
|
RU2833449C1 |
| ТРАНСПОРТНАЯ СИСТЕМА (ВАРИАНТЫ) | 2016 |
|
RU2633667C2 |
| Устройство для предварительной раскрутки ротора беспилотного гироплана | 2015 |
|
RU2611470C1 |
Малоразмерный беспилотный летательный аппарат с возможностью перемещения по поверхности земли содержит силовую раму, состоящую из двух нижних пластин, верхней пластины, двух передних стоек, соединяющих верхнюю и нижнюю пластину, двух передних лучей, задней стойки, двух задних лучей, закрепленных определенным образом. На конце каждого переднего луча сверху закреплен маршевый электродвигатель для вращения авиационного винта, а снизу с помощью уголка тяговый электродвигатель, на ось которого смонтирована шина, образующие передние колеса для движения по поверхности земли. На конце нижнего заднего луча с помощью кронштейна, подшипника кронштейна, вилки, оси закреплено заднее колесо, включающее подшипник колеса, диск, шину. На верхней пластине закреплены контроллер, регуляторы оборотов маршевых электродвигателей, регулятор оборотов тяговых электродвигателей, приемник, крепление для устройства съемки и передачи видеоизображения. В полости силовой рамы закреплен аккумулятор. Обеспечивается расширение функциональных возможностей беспилотного летательного аппарата за счет обеспечения возможности перемещения по суше. 3 ил.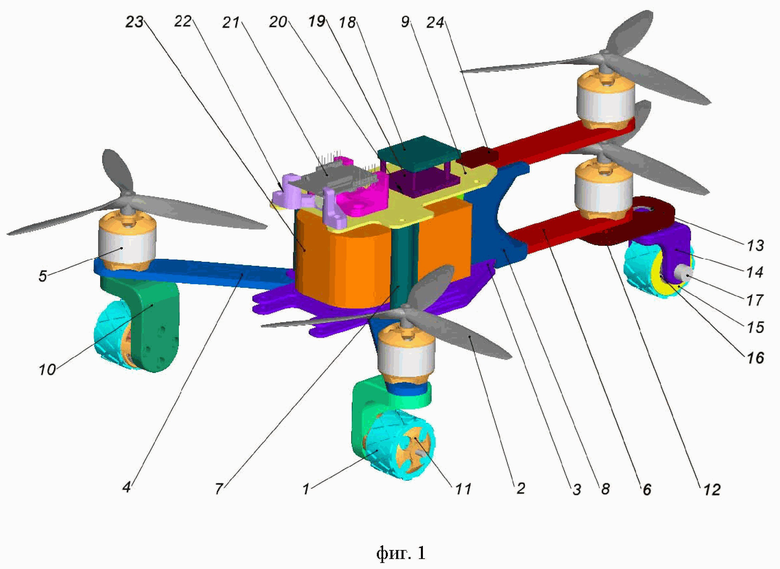
Малоразмерный беспилотный летательный аппарат с возможностью перемещения по поверхности земли, содержащий силовую раму, состоящую из двух нижних пластин, верхней пластины, двух передних стоек, соединяющих верхнюю и нижнюю пластину, двух передних лучей, задней стойки, двух задних лучей, при этом два передних луча и нижний луч закреплены между двумя нижними пластинами, верхний задний луч закреплен к верхней пластине;
на конце каждого переднего луча сверху закреплен маршевый электродвигатель для вращения авиационного винта, а снизу с помощью уголка тяговый электродвигатель, на ось которого смонтирована шина, образующие передние колеса для движения по поверхности земли, на конце нижнего заднего луча с помощью кронштейна, подшипника кронштейна, вилки, оси закреплено заднее колесо, включающее подшипник колеса, диск, шину;
на верхней пластине закреплены контроллер, а также электрически соединенные с ним регуляторы оборотов маршевых электродвигателей, регулятор оборотов тяговых электродвигателей, приемник, а также на верхней пластине смонтировано крепление для устройства съемки и передачи видеоизображения;
в полости силовой рамы закреплен аккумулятор, электрически соединенный с контроллером.
| US 20140131507 A1, 15.05.2014 | |||
| US 11034443 B2, 15.06.2021 | |||
| CN 204020446 U, 17.12.2014 | |||
| Трёхсредный мобильный аппарат "Этажерка" | 2019 |
|
RU2706748C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2012 |
|
RU2537509C2 |

