Изобретение относится к техническим средствам подготовки операторов систем управления и может быть использовано для практического обучения операторов на тренажерах.
Известно устройство для обучения операторов, содержащее регистр адреса (микрокоманды), блок памяти, регистр микрокоманды, панель органов индикации, выполненную в виде информационного табло, панель органов управления, выполненную в виде блока ввода ответных действий оператора, два блока сравнения, трех элементов ИЛИ, генератор, элементы задержки, счетчик, триггер и блок звуковой сигнализации (см. ав. св. СССР №1437897, G09B 9/00, 1988).
Однако данное устройство имеет узкую область применения, поскольку на этапе отработки навыков пооперационной своевременной деятельности частое включение звуковой сигнализации не позволяет закрепить навыки при отработке оператором сложных алгоритмов управления, имеющих место в современных автоматизированных системах управления (АСУ).
Известно устройство для обучения операторов (см. патент РФ №2011229, 5 G09B 9/00, 1994, бюл. 7), содержащее блок задания программы обучения, блок ответных действий оператора, стартовый, главный и установочный элементы ИЛИ, элемент задержки, главный и ответный блоки сравнения, блоки стартовых и опросных элементов И, регистр числа, стартовый и главный счетчики, дешифратор, триггер, элемент И и табло.
Недостатком данного устройства является относительно низкая обоснованность оценивания правильности (безошибочности) действий оператора (обучаемого) при отработке сложных алгоритмов управления в условиях непрерывной динамики смены состояний объекта управления и с учетом влияющих факторов.
Наиболее близким по технической сущности к заявляемому устройству (прототипом) является устройство для обучения операторов (см. патент РФ №2281560, G09B 9/00, 2006, бюл. 22), содержащее блок задания программы обучения, блок ответных действий оператора, стартовый, главный и установочный элементы ИЛИ, элемент задержки, главный и ответный блоки сравнения, блоки стартовых и опросных элементов И, регистр числа, стартовый и главный счетчики, дешифратор, триггер, элемент И, табло, блок коррекции требований и блок коррекции команд, причем М≥2 информационных входов табло соединены с соответствующими М выходами дешифратора, М входов которого подключены к соответствующим М выходам блока опросных элементов И, М счетных входов которого соединены с соответствующими М выходами главного счетчика, установочный вход «Уст. «0» которого соединен с первым входом стартового элемента ИЛИ, вторым входом установочного элемента ИЛИ, первым входом главного элемента ИЛИ и является входом «Запуск» устройства, выход главного элемента ИЛИ подключен к счетному входу «Уст. «1» главного счетчика и первому управляющему входу блока задания программы обучения, М индикаторных выходов которого соединены с соответствующими М индикаторными входами табло, первый контрольный вход которого подключен к прямому выходу триггера, инверсный выход которого соединен с первым входом элемента И и вторым контрольным входом табло, первый выход главного блока сравнения соединен с вторым входом стартового элемента ИЛИ и вторым управляющим входом блока задания программы обучения, второй выход главного блока сравнения подключен к второму входу главного элемента ИЛИ, входу элемента задержки и второму входу элемента И, выход которого соединен с счетным входом «Уст. «1» стартового счетчика, установочный вход «Уст. «0» которого подключен к выходу стартового элемента ИЛИ, выход элемента задержки соединен с управляющим входом регистра числа и с М информационными входами блока стартовых элементов И, М счетных входов которого соединены с соответствующими М выходами стартового счетчика, М выходов блока стартовых элементов И подключены к соответствующим М информационным входам ответного блока сравнения, М ответных входов которого соединены с соответствующими М выходами регистра числа, выход ответного блока сравнения подключен к первому входу установочного элемента ИЛИ, выход которого соединен с установочным входом триггера, сбрасывающий вход которого подключен к контрольному выходу блока задания программы обучения и к М информационным входам блока опросных элементов И, М выходов блока ответных действий оператора подключены к соответствующим М ответным входам главного блока сравнения, М индикаторных выходов блока коррекции команд подключены к соответствующим М индикаторным входам табло, М информационных выходов блока коррекции команд соединены с соответствующими М информационными входами главного блока сравнения, М информационных входов блока коррекции команд подключены к соответствующим М информационным выходам блока задания программы обучения, М контрольных входов блока коррекции команд соединены с соответствующими М контрольными выходами блока коррекции требований, причем М корректирующих входов регистра числа подключены к соответствующим М корректирующим выходам блока коррекции требований, М входов которого являются соответствующими М входами «Коррекция» устройства.
В прототипе реализуется возможность более обоснованного анализа действий оператора на основе динамически корректируемого количества разрешенных ошибок, допускаемых обучаемым подряд при отработке сложных алгоритмов управления.
Однако, прототип имеет недостаток - невозможность идентификации и верификации при обучении операторов граничных и аварийных (катастрофичных) состояний объекта управления, состояний, характерных для аварийного, критического положения параметров надежности и устойчивости объекта в ситуации, способной проявиться при плавных изменениях параметров управляемого объекта, обусловленных не (не явно) ошибочными, но способными к генерации и плавному накоплению потенциальных ошибок (угроз) управляющими воздействиями (микрокомандами управления), предпринимаемыми оператором в ходе обучения.
Данная ситуация способна проявится не сразу в ходе очередного этапа выполнения алгоритма управления обучаемым, содержимое одной микрооперации алгоритма управления даже в случае явной ошибки не всегда приводит к граничному и аварийному (катастрофическому) состоянию системы, однако накопление потенциальных ошибок (угроз) управления в вопросе о сохранении надежности и устойчивости при плавных и незначительных вариациях параметров управляемого объекта очень опасна. Вопросами идентификации и верификации возможных катастрофических состояний управляемого объекта занимается раздел математической теории, называемый теорией катастроф [1-3]. Данная теория посвящена скачкообразным изменениям состояний управляемого объекта, возникающим в виде внезапного ответа системы (объекта) на плавное изменение параметров, вызванное предпринимаемыми оператором управляющими воздействиями. Катастрофы на объекте управления типа АСУ могут выступать в виде неожиданных перегрузок коммутационных устройств, резких перепадов пропускной способности каналов управления АСУ, скачкообразного изменения параметров среды распространения управляющего сигнала и т.п. Например, в ходе обучения алгоритмам динамического многокритериального управления процессом функционирования объекта типа сеть многоканальной радиосвязи, оператор (пользователь) должен формировать управляющие воздействия, рассчитанные на определенную пропускную способность сети. Однако, во время функционирования сети многоканальной радиосвязи наряду с плавным дрейфом параметров среды распространения сигнала (например, изменение конфигурации отражающего тропосферного слоя - для тропосферной связи), происходит плавное нарастание интенсивности абонентских переговоров, поскольку оператор, не учитывая внешние условия, разрешает (инициирует) соединение абонентов. Это не является явной ошибкой управления, но в непредвиденный момент времени способно привести к скачкообразному изменению состояния показателей пропускной способности сети, а как следствие - к потере надежности и устойчивости функционирования сети многоканальной радиосвязи в целом, способно вызвать лавинообразное изменение пропускной способности - коллапс и блокировку сети.
Адекватное устройство для обучения операторов должно быть способно проводить идентификацию и верификацию граничных и аварийных (катастрофичных) состояний объекта управления, должно быть способно предсказать возможное катастрофическое состояние данного объекта, давая, тем самым, пользователю (оператору) подсказку- давая возможность избежать состояний, характерных для аварийного, критического положения параметров надежности и устойчивости объекта управления. Не учет плавного возможного изменения параметров объекта управления, обусловленного плавным нарастанием количества предпринимаемых обучаемым не (не явно) ошибочных, но способных к генерации и накоплению потенциальных ошибок (угроз) управляющих воздействий (микрокоманд управления), облегчает задачу построения устройства обучения операторов, однако резко снижает степень адекватности изучаемых ситуаций, уровень достоверности среды и условий обучения.
Целью предлагаемого изобретения является создание управляемого устройства, способного осуществлять обучение операторов и производить идентификацию и верификацию граничных и аварийных (катастрофичных) состояний объекта управления при плавных изменениях параметров объекта, обусловленных предпринимаемыми обучаемым управляющими воздействиями. С учетом этого, требуется создать устройство, способное своевременно оповещать (предупреждать) обучаемого оператора системы об ее возможном аварийном состоянии, на основе полученных данных идентификации и верификации.
Указанная цель достигается тем, что в известное устройство для обучения операторов, содержащее блок задания программы обучения, блок ответных действий оператора, стартовый, главный и установочный элементы ИЛИ, элемент задержки, главный и ответный блоки сравнения, блоки стартовых и опросных элементов И, регистр числа, стартовый и главный счетчики, дешифратор, триггер, элемент И, блок коррекции требований, блок коррекции команд и табло, М≥2 информационных входов которого соединены с соответствующими М выходами дешифратора, М входов которого подключены к соответствующим М выходам блока опросных элементов И, М счетных входов которого соединены с соответствующими М выходами главного счетчика, установочный вход «Уст. «0» которого соединен с первым входом стартового элемента ИЛИ, вторым входом установочного элемента ИЛИ, первым входом главного элемента ИЛИ и является входом «Запуск» устройства, выход главного элемента ИЛИ подключен к счетному входу «Уст. «1» главного счетчика и первому управляющему входу блока задания программы обучения, первый контрольный вход табло подключен к прямому выходу триггера, инверсный выход которого соединен с первым входом элемента И и вторым контрольным входом табло, первый выход главного блока сравнения соединен с вторым входом стартового элемента ИЛИ и вторым управляющим входом блока задания программы обучения, второй выход главного блока сравнения подключен к второму входу главного элемента ИЛИ, входу элемента задержки и второму входу элемента И, выход которого соединен с счетным входом «Уст. «1» стартового счетчика, установочный вход «Уст. «0» которого подключен к выходу стартового элемента ИЛИ, М счетных входов блока стартовых элементов И соединены с соответствующими М выходами стартового счетчика, М выходов блока стартовых элементов И подключены к соответствующим М информационным входам ответного блока сравнения, М ответных входов которого соединены с соответствующими М выходами регистра числа, выход ответного блока сравнения подключен к первому входу установочного элемента ИЛИ, выход которого соединен с установочным входом триггера, сбрасывающий вход которого подключен к контрольному выходу блока задания программы обучения и к М информационным входам блока опросных элементов И, М выходов блока ответных действий оператора подключены к соответствующим М ответным входам главного блока сравнения, М информационных выходов блока коррекции команд соединены с соответствующими М информационными входами главного блока сравнения, М информационных входов блока коррекции команд подключены к соответствующим М информационным выходам блока задания программы обучения, М контрольных входов блока коррекции команд соединены с соответствующими М контрольными выходами блока коррекции требований, М корректирующих входов регистра числа подключены к соответствующим М корректирующим выходам блока коррекции требований, М входов которого являются соответствующими М входами «Коррекция» устройства, причем первый контрольный вход табло соединен с входом транспаранта «Упражнение», второй контрольный вход табло подключен к входу транспаранта «Тренировка», а М информационных входов табло соединены с соответствующими М входами индикатора номера тренировки, дополнительно введены блок анализа и блок контроля. При этом выход элемента задержки соединен с управляющим входом регистра числа, с М информационными входами блока стартовых элементов И, с тактовым входом блока контроля и тактовым входом блока анализа, проверочный вход которого подключен к выходу блока контроля, управляющий вход которого является входом «Ввод управления» устройства, М индикаторных выходов блока задания программы обучения соединены с соответствующими М индикаторными выходами блока коррекции команд и подключены к соответствующим М управляющим входам блока анализа, М управляющих выходов которого подключены к соответствующим М индикаторным входам табло, которые соединены с соответствующими М входами панели индикации, а предупреждающий выход блока анализа является выходом «Угроза» устройства.
Блок анализа состоит из центрального оперативного запоминающего устройства (ОЗУ), М исполнительных ОЗУ, постоянного запоминающего устройства (ПЗУ), элемента итерационного сравнения, элемента сравнения, промежуточного ОЗУ, промежуточного элемента И и элемента И. При этом М управляющих входов центрального ОЗУ являются соответствующими М управляющими входами блока анализа, М управляющих выходов центрального ОЗУ являются соответствующими М управляющими выходами блока анализа, тактовый вход центрального ОЗУ подключен к тактовому входу ПЗУ и является тактовым входом блока анализа, М исполнительных выходов центрального ОЗУ подключены к входам М соответствующих исполнительных ОЗУ, входы М исполнительных ОЗУ объединены и подключены к первому входу элемента итерационного сравнения и второму входу элемента сравнения, выходы М исполнительных ОЗУ объединены и подключены к второму входу элемента итерационного сравнения. Выход ПЗУ соединен с первым входом элемента сравнения, выход элемента итерационного сравнения подключен к входу промежуточного ОЗУ и второму входу промежуточного элемента И, первый вход которого соединен с выходом промежуточного ОЗУ. Выход промежуточного элемента И соединен с выходом элемента сравнения и первым входом элемента И, второй вход которого подключен к проверочному входу ПЗУ и является проверочным входом блока анализа. Выход элемента И соединен со считывающим входом центрального ОЗУ и является предупредительным выходом блока анализа и выходом «Угроза» устройства.
Блок контроля состоит из проверочного ОЗУ и счетчика. При этом тактовый выход счетчика подключен к тактовому входу проверочного ОЗУ, сбрасывающий выход которого подключен к сбрасывающему входу счетчика, тактовый вход которого является тактовым входом блока контроля. Проверочный выход проверочного ОЗУ является выходом блока контроля, управляющий вход проверочного ОЗУ является управляющим входом блока контроля и входом «Ввод управления» устройства.
Принцип создания предлагаемого управляемого устройства для обучения операторов основан на известных результатах исследований в области теории катастроф, изложенных в работах [1-5]. Анализ данных работ позволяет сформировать математически корректный алгоритм идентификации и верификации граничных и аварийных (катастрофичных) состояний, характерных для аварийного, критического положения параметров надежности и устойчивости объекта управления, для ситуации, способной проявиться при плавных изменениях параметров объекта управления, обусловленных не явно ошибочными, но способными к генерации и плавному накоплению потенциальных ошибок управляющими воздействиями (микрокомандами управления), предпринимаемыми оператором в ходе обучения. Действительно, объективно существуют микрокоманды управления, которые, по своему характеру, не являются явными ошибками, допускаемыми обучаемым при отработке сложных алгоритмов управления, но предопределяют плавный дрейф параметров объекта управления к граничному и аварийному (катастрофическому) состоянию, обуславливают плавное движение («скатывание») объекта к сбою (коллапсу).
Таким образом, в рамках управляемого обучения операторов, решается задача априорного оценивания и сравнения значений предельного количества микрокоманд управления, которые, не являясь явными ошибками (ошибочными микрокомандами), предопределяют плавный дрейф параметров объекта управления к граничному и аварийному (катастрофическому) состоянию. С точки зрения физической интерпретации, это процесс априорного статистического анализа плавных и незначительных изменений управляющих воздействий на систему с возможностью оповещения (предупреждения) оператора (обучаемого) о потенциальных катастрофических последствиях в поведении объекта, последствиях, которые на первый взгляд не видны и практически никогда не учитываются при реализации алгоритмов управления объектами и при обучении операторов систем управления.
При данном подходе к обучению операторов, возможно представление динамики изменения состояния объекта управления при плавных и незначительных вариациях управляющих воздействий, в виде динамики изменения на индикаторных выходах блока задания программы обучения и блока коррекции команд некоторого предельного количества микрокоманд (микроопераций) управления, которые, по своему характеру, не являются явными ошибками, но предопределяют плавный дрейф параметров объекта управления к граничному и аварийному (катастрофическому) состоянию, обуславливают плавное «скатывание» объекта к сбою (коллапсу). Анализ результатов работ [1-5] позволяет предусмотреть в устройстве возможность идентификации и верификации граничных и аварийных (катастрофичных) состояний управляемой системы при плавных изменениях параметров управляющих воздействий, предпринимаемых обучаемым.
Математическая формализация параметров управляющих воздействий, предпринимаемых обучаемым и влияющих на поведение системы, может быть представлена посредством статистического определения на индикаторных выходах блока задания программы обучения и блока коррекции команд, соответствующих значений количества введенных обучаемым микрокоманд (микроопераций) управления, которые, по своему характеру, не являются явными ошибками, но предопределяют плавный дрейф параметров объекта управления к граничному и аварийному (катастрофическому) состоянию для каждого m-го уровня идентификации его состояний, где степень детализации (полноты) идентификации состояний системы управления М≥2; m=2, …, М; М=20.
Количество N, где n=1, 2, … N, вводимых обучаемым микрокоманд (микроопераций) управления, которые, по своему характеру, не являются явными ошибками, но предопределяют плавный дрейф параметров объекта управления к граничному и аварийному (катастрофическому) состоянию для каждого m-го уровня идентификации его состояний (каждое nm), определяется возможностями системы управления, ее надежностью, устойчивостью, граничным значениям производительности объекта управления, и может составлять, например, от 1 (одного) до 50 (пятидесяти).
Общее количество таких значений равно NM и данные значения представляют собой множество:

где каждый m-й элемент множества, кроме NM (k+1), является подмножеством Nm и имеет физический смысл превышения порога возможностей системы по надежности и устойчивости и, как следствие, высокой вероятности перехода объекта управления в аварийное (катастрофичное) состояние на следующем шаге (k+1) обучения.
Очевидно, что для решения задачи априорного оценивания и сравнения значений количества вводимых обучаемым микрокоманд (микроопераций) управления, которые, по своему характеру, не являются явными ошибками, но предопределяют плавный дрейф параметров при плавных изменениях управляющих воздействий, необходимо проводить текущий пошаговый мониторинг, осуществлять идентификацию и верификацию граничных и аварийных (катастрофичных) состояний системы (объекта управления).
Идентификация граничных и аварийных (катастрофичных) состояний объекта управления производится путем пошагового (потактового, где k - шаг (такт) обучения) априорного оценивания и сравнения значений каждого m-го из nm элементов множества Nm с целью определения наличия или отсутствия возможного превышения этими значениями допустимого порога, определяемого выражением:

где Nm - допустимое для каждого m-го уровня идентификации состояний объекта значение количества вводимых обучаемым микрокоманд (микроопераций) управления, которые, по своему характеру, не являются ошибочными, но при превышении которого, объект управления с большой вероятностью перейдет в аварийное (катастрофичное) состояние из любого другого состояния. Превышение, на одном из последующих (k+1) шагов обучения, любым nm-м из N элементов множества Nm данного порога, характеризует начало плавного изменения параметров управляющих воздействий.
Верификация граничных и аварийных (катастрофичных) состояний управляемого объекта представляет собой независимый от идентификации процесс, характеризует превышение значения любого nm-го из N элементов множества Nm на данном k-м шаге (такте) процесса обучения над значением этого же элемента на следующем (k+1)-м шаге (такте) и производится путем априорного оценивания значений каждого nm-го из N элементов множества Nm на k-м шаге (такте) и сравнения полученного значения с оценочным значением этого же элемента на следующем (k+1)-м шаге (такте) в соответствии с выражением:

Физический смысл процесса верификации заключается в выявлении тенденции изменения вводимых обучаемым управляющих воздействий (объема потока микрокоманд (микроопераций) управления, которые, по своему характеру, не являются явными ошибками, но предопределяют плавный дрейф параметров объекта) в сторону граничного и аварийного (катастрофичного) состояния объекта управления.
В обоих случаях априорного оценивания и сравнения значений количества микрокоманд (микроопераций) управления, которые, не являясь ошибочными, тем не менее, предопределяют плавный дрейф параметров объекта в сторону аварии - как при осуществлении процесса идентификации граничных и аварийных (катастрофичных) состояний системы, когда идентифицировано событие

так и при осуществлении процесса верификации, когда подтверждена тенденция изменения параметров вводимых оператором управляющих воздействий в сторону граничного и аварийного (катастрофичного) состояния системы

обучаемый (пользователь, оператор), осуществляющий управление объектом, должен быть оповещен (предупрежден) о возможном аварийном состоянии объекта управления.
Если обучаемый (пользователь, оператор) не способен повлиять на нежелательное изменение параметров вводимых управляющих воздействий (количества микрокоманд (микроопераций) управления, предопределяющих плавный дрейф параметров объекта в сторону граничного и аварийного (катастрофичного) состояния) или нуждается, например, для получения обучаемым навыков управления в критичных условиях, в получении именно граничных и аварийных (катастрофичных) состояний системы, процесс обучения будет осуществляться без коррекции количества таких микрокоманд (микроопераций) или пороговых значений этого количества.
Если обучаемый (пользователь, оператор), в соответствии с введенным алгоритмом обучения, может и способен повлиять на нежелательное изменение параметров вводимых управляющих воздействий (количества микрокоманд (микроопераций) управления, предопределяющих плавный дрейф параметров объекта в сторону граничного и аварийного (катастрофичного) состояния) и процесс обучения операторов осуществляется в рамках динамического оптимального управления системой, когда аварийные состояния этой системы недопустимы, на основе полученных данных идентификации и верификации происходит внешняя коррекция количества таких микрокоманд (микроопераций) или их пороговых значений с целью не допустить аварийного (катастрофичного) скачкообразного изменения состояний системы при малых управленческих возмущениях [2].
Примеры, иллюстрирующие аналогичные, с точки зрения теории катастроф, операции предотвращения потери устойчивости и надежности сложных управляемых систем при плавных изменениях как внешних условий, так и управляющих воздействий, приведены в [1] и [2], здесь представлены алгоритмы анализа структурной устойчивости объектов и оценки критических точек (точек Морса) в процессе функционирования системы, характеризующих локальные максимумы и минимумы устойчивого (не катастрофичного) поведения объекта при плавных изменениях внешних условий и вводимых управлений.
Анализ выражений (1)-(5) позволяет сделать вывод о технической возможности реализации процесса обучения операторов и процессов идентификации и верификации граничных и аварийных (катастрофичных) состояний объекта управления при плавных изменениях параметров данного объекта, обусловленных предпринимаемыми обучаемым управляющими воздействиями.
Благодаря новой совокупности существенных признаков, за счет введения блока анализа, предназначенного для осуществления процедур идентификации и верификации граничных и аварийных (катастрофичных) состояний объекта управления при плавных изменениях параметров этого объекта, обусловленных предпринимаемыми обучаемым управляющими воздействиями, а также для выработки сигналов логического нуля или логической единицы (сигнала предсказания и предупреждения), характеризующих соответственно отсутствие или наличие возможного катастрофического состояния объекта управления, и блока контроля, предназначенного для формирования управляющей кодовой последовательности, последовательности пороговых значений количества микрокоманд (микроопераций) управления, предопределяющих плавный дрейф параметров объекта в сторону граничного и аварийного (катастрофичного) состояния, а также для формирования сигнала логического нуля или логической единицы, характеризующих соответственно запрещение или разрешение обучаемого (пользователя, оператора) на выдачу сигнала оповещения о наличии возможного катастрофического состояния объекта управления, в заявленном устройстве достигается возможность обеспечивать повышение степени адекватности изучаемых ситуаций, повышение уровня достоверности среды и условий обучения. В заявленном устройстве достигается возможность обеспечивать обучение операторов и производить идентификацию и верификацию граничных и аварийных (катастрофичных) состояний объекта управления при плавных изменениях параметров объекта, обусловленных предпринимаемыми обучаемым управляющими воздействиями (количества микрокоманд (микроопераций) управления, предопределяющих плавный дрейф параметров объекта в сторону граничного и катастрофичного состояния), а также возможность своевременно оповещать (предупреждать) оператора (обучаемого, пользователя) о возможном аварийном состоянии объекта управления, на основе полученных данных идентификации и верификации.
Заявленное устройство поясняется чертежами, на которых представлены:
на фиг. 1 - структурная схема устройства для обучения операторов;
на фиг. 2 - структурная схема блока анализа;
на фиг. 3 - структурная схема блока контроля;
на фиг. 4 - структурная схема блока задания программы обучения;
на фиг. 5 - структурная схема блока стартовых элементов И;
на фиг. 6 - структурная схема блока опросных элементов И;
на фиг. 7 - структурная схема регистра числа;
на фиг. 8 - структурная схема блока коррекции требований;
на фиг. 9 - структурная схема блока коррекции команд;
Устройство для обучения операторов, изображенное на фиг. 1, состоит из блока задания программы обучения 1, блока ответных действий оператора 2, стартового 7, главного 13 и установочного 18 элементов ИЛИ, элемента задержки 21, главного 3 и ответного 19 блоков сравнения, блоков стартовых 8 и опросных 10 элементов И, регистра числа 20, стартового 6 и главного 11 счетчиков, дешифратора 12, триггера 9, элемента И 5, блока коррекции требований 22, блока коррекции команд 23, блока анализа 24, блока контроля 25 и табло 4, М≥2 информационных входов 441-44М которого соединены с соответствующими М выходами 1211-121М дешифратора 12. М входов 1221-122М которого подключены к соответствующим М выходам 1031-103М блока опросных элементов И 10, М счетных входов 1011-101М которого соединены с соответствующими М выходами 1111-111М главного счетчика 11, установочный вход «Уст. «0» которого соединен с первым входом 71 стартового элемента ИЛИ 7, вторым входом 182 установочного элемента ИЛИ 18, первым входом 131 главного элемента ИЛИ 13 и является входом «Запуск» устройства. Выход 133 главного элемента ИЛИ 13 подключен к счетному входу «Уст. «1» главного счетчика 11 и первому управляющему входу 013 блока задания программы обучения 1. Первый контрольный вход 41 табло 4 подключен к прямому выходу 91 триггера 9, инверсный выход 92 которого соединен с первым входом 51 элемента И 5 и вторым контрольным входом 42 табло 4, первый выход 33 главного блока сравнения 3 соединен с вторым входом 72 стартового элемента ИЛИ 7 и вторым управляющим входом 014 блока задания программы обучения 1, второй выход 34 главного блока сравнения 3 подключен к второму входу 132 главного элемента ИЛИ 13, входу 211 элемента задержки 21 и второму входу 52 элемента И 5, выход 53 которого соединен с счетным входом «Уст. «1» стартового счетчика 6, установочный вход «Уст. «0» которого подключен к выходу 73 стартового элемента ИЛИ 7. При этом М счетных входов 811-81М блока стартовых элементов И 8 соединены с соответствующими М выходами 611-61М стартового счетчика 6, М выходов 831-83М блока стартовых элементов И 8 подключены к соответствующим М информационным входам 1911-191М ответного блока сравнения 19, М ответных входов 1921-192М которого соединены с соответствующими М выходами 2021 -202М регистра числа 20. Выход 193 ответного блока сравнения 19 подключен к первому входу 181 установочного элемента ИЛИ 18, выход 183 которого соединен с установочным входом 93 триггера 9, сбрасывающий вход 94 которого подключен к контрольному выходу 015 блока задания программы обучения 1 и к М информационным входам 1021-102М блока опросных элементов И 10, М выходов 0211-021М блока ответных действий оператора 2 подключены к соответствующим М ответным входам 311-31М главного блока сравнения 3, М информационных выходов 2331-233М блока коррекции команд 23 соединены с соответствующими М информационными входами 321-32М главного блока сравнения 3, М информационных входов 2311-231М блока коррекции команд 23 подключены к соответствующим М информационным выходам 0121-012М блока задания программы обучения 1, М контрольных входов 2341-234М блока коррекции команд 23 соединены с соответствующими М контрольными выходами 2221-222М блока коррекции требований 22, М корректирующих входов 2031-203М регистра числа 20 подключены к соответствующим М корректирующим выходам 2231-223М блока коррекции требований 22, М входов 2211-221М которого являются соответствующими М (К1-КМ) входами «Коррекция» устройства. Причем первый контрольный вход 41 табло 4 соединен с входом 151 транспаранта «Упражнение» 15, второй контрольный вход 42 табло 4 подключен к входу транспаранта «Тренировка» 16, а М информационных входов 441-44М табло 4 соединены с соответствующими М входами 1711-171М индикатора номера тренировки 17. При этом выход 212 элемента задержки 21 соединен с управляющим входом 201 регистра числа 20, с М информационными входами 821-82М блока стартовых элементов И 8, с тактовым входом 253 блока контроля 25 и с тактовым входом 243 блока анализа 24, проверочный вход 244 которого подключен к выходу 252 блока контроля 25, управляющий вход 251 которого является входом «Ввод управления» устройства, М индикаторных выходов 0111-011М блока задания программы обучения 1 соединены с соответствующими М индикаторными выходами 2321-232М блока коррекции команд 23 и подключены к соответствующим М управляющим входам 2411-241М блока анализа 24, М управляющих выходов 2421-242М которого подключены к соответствующим М индикаторным входам 431-43М табло 4, которые соединены с соответствующими М входами 1411-141М панели индикации 14, а предупреждающий выход 245 блока анализа 24 является выходом «Угроза» устройства.
Число «М, (М≥2; m=2, …, M)» (входов, выходов, элементов И, счетчиков и т.п.) определяется в соответствии с необходимой и достаточной для обучения операторов степенью детализации (полноты) идентификации состояний системы управления и, как правило, составляет от 2 (двух) до 20 (двадцати).
Число «N, (n=1, 2, …, N)» (микрокоманд (микроопераций), входов, выходов и т.п.) определяется в соответствии с возможностями системы управления, ее надежностью, устойчивостью, граничными значениями производительности объекта управления, и может составлять, например, от 1 (одного) до 50 (пятидесяти).
Блок анализа 24 предназначен для осуществления процедур идентификации и верификации граничных и аварийных (катастрофичных) состояний объекта управления при плавных изменениях параметров этого объекта, обусловленных предпринимаемыми обучаемым управляющими воздействиями, а также для выработки сигналов логического нуля или логической единицы (сигнала предсказания и предупреждения), характеризующих соответственно отсутствие или наличие возможного катастрофического состояния объекта управления.
Блок анализа 24 (фиг. 2) состоит из центрального ОЗУ 24.0, М исполнительных ОЗУ 24.11-24.1 м, ПЗУ 24.2, элемента итерационного сравнения 24.3, элемента сравнения 24.4, промежуточного ОЗУ 24.5, промежуточного элемента И 24.6 и элемента И 24.7, причем М управляющих входов 24.0-11-24.0-1М центрального ОЗУ 24.0 являются соответствующими М управляющими входами 2411-241М блока анализа 24, М управляющих выходов 24.0-21-24.0-2М центрального ОЗУ 24.0 являются соответствующими М управляющими выходами 2421-242М блока анализа 24. Тактовый вход 24.0-3 центрального ОЗУ 24.0 подключен к тактовому входу 24.2-1 ПЗУ 24.2 и является тактовым входом 243 блока анализа 24, М исполнительных выходов 24.0-41-24.0-4М центрального ОЗУ 24.0 подключены к входам М соответствующих исполнительных ОЗУ 24.11-24.1 м- Входы М исполнительных ОЗУ 24.11-24.1М объединены и подключены к первому входу 24.3-1 элемента итерационного сравнения 24.3 и второму входу 24.4-2 элемента сравнения 24.4, выходы М исполнительных ОЗУ 24.11-24.1М объединены и подключены к второму входу 24.3-2 элемента итерационного сравнения 24.3. Выход ПЗУ 24.2 соединен с первым входом 24.4-1 элемента сравнения 24.4, выход элемента итерационного сравнения 24.3 подключен к входу промежуточного ОЗУ 24.5 и второму входу 24.6-2 промежуточного элемента И 24.6, первый вход 24.6-1 которого соединен с выходом промежуточного ОЗУ 24.5. Выход промежуточного элемента И 24.6 соединен с выходом элемента сравнения 24.4 и первым входом 24.7-1 элемента И 24.7, второй вход 24.7-2 которого подключен к проверочному входу 24.2-2 ПЗУ 24.2 и является проверочным входом 244 блока анализа 24. Выход элемента И 24.7 соединен со считывающим входом 24.0-5 центрального ОЗУ 24.0 и является предупредительным выходом 245 блока анализа 24 и выходом «Угроза» устройства.
Центральное ОЗУ 24.0 блока анализа 24 предназначено для записи, хранения, считывания в интересах проверки (идентификации и верификации)с М исполнительных выходов 24.0-41-24.0-4М в двоичном коде значений количества микрокоманд (микроопераций) управления, которые, не являясь ошибочными, тем не менее, предопределяют плавный дрейф параметров объекта в сторону аварийного состояния, а также для считывания с М управляющих выходов 24.0-21-24.0-2М в двоичном коде сигналов, описывающих содержимое микрокоманды (микрооперации) управления, соответствующей текущему этапу выполнения алгоритма управления обучаемым. Центральное ОЗУ 24.0 может быть технически реализовано на основе высокоскоростного ОЗУ серии 155 (например, К155РУ2), как показано в [Шило В.Л. Популярные цифровые микросхемы: Справочник. - М.: Радио и связь, 1987. - 352 с, С. 164-166, рис. 1.121].
Исполнительные ОЗУ 24.11-24.1М блока анализа 24 идентичны и предназначены для записи, хранения и считывания в двоичном коде из ячеек памяти значений n (вводимых обучаемым микрокоманд (микроопераций) управления, которые, по своему характеру, не являются явными ошибками, но предопределяют плавный дрейф параметров объекта управления к граничному и аварийному (катастрофическому) состоянию) из множества N (допустимое значение количества вводимых обучаемым микрокоманд (микроопераций) управления) на Атом (предыдущем) шаге (такте) обучения. Исполнительные ОЗУ 24.11-24.1М могут быть технически реализованы на базе типового динамического ОЗУ, описанного в работе [Гусев В.В., Лебедев О.Н., Сидоров A.M. Основы импульсной и цифровой техники. - СПб.: СПВВИУС, 1995, - 248 с, С. 194-196, рис. 6.9 (а)].
Постоянное запоминающее устройство 24.2 блока анализа 24 предназначено для предварительной записи, хранения и считывания в двоичном коде из ячеек памяти на первый вход элемента сравнения 24.4 заранее записанного каждого допустимого значения (порога) -количества nm для каждого m-го элемента из множества Nm, позволяющего определить наличие или отсутствие возможного превышения этого допустимого порога в соответствии с выражением (2). Техническая реализация ПЗУ 24.2 возможна по аналогии с двухвходовым ре-программируемым ПЗУ, описанным в [Гусев В.В., Лебедев О.П.. Сидоров A.M. Основы импульсной и цифровой техники. - СПб.: СПВВИУС, 1995, - 248 с, С. 199-205, рис. 6.12].
Элемент итерационного сравнения 24.3 блока анализа 24 предназначен для последовательного (пошагового, потактового) априорного оценивания и сравнения значений каждого nm-ого из N элементов множества NМ на данном k-ом шаге (такте) цикла обучения и функционирования устройства со значением этого же элемента на следующем (k+1)-м шаге (такте) в соответствии с выражением (3). Элемент итерационного сравнения 24.3 может быть реализован технически на базе серийно выпускаемого цифрового узла сравнения (цифрового компаратора), как показано в [Гусев В.В., Лебедев О.Н., Сидоров A.M. Основы импульсной и цифровой техники. - СПб.: СПВВИУС, 1995. - 248 с., С. 149-152, рис. 5.19].
Элемент сравнения 24.4 блока анализа 24 предназначен для последовательного (пошагового, потактового) априорного оценивания и сравнения заранее записанного допустимого значения (порога) количества вводимых обучаемым микрокоманд (микроопераций) управления Nm для каждого m-го уровня идентификации состояний объекта с реальными значениями количества микрокоманд (микроопераций) управления, с целью определения наличия или отсутствия возможного превышения этими значениями допустимого порога в соответствии с выражением (2). Элемент сравнения 24.4 представляет собой цифровой узел сравнения (цифровой компаратор), описанный в [Гусев В.В., Лебедев О.П., Сидоров A.M. Основы импульсной и цифровой техники. - СПб.: СПВВИУС, 1995. - 248 с, С. 149-152, рис. 5.19].
Промежуточное ОЗУ 24.5 блока анализа 24 предназначено для записи, промежуточного хранения и считывания в двоичном коде логического нуля или логической единицы, характеризующих полученный на k-м шаге (такте) обучения результат идентификации и верификации. Промежуточное ОЗУ 24.5 может быть реализовано на базе динамического ОЗУ, описанного в литературе [Гусев В.В., Лебедев О.Н., Сидоров A.M. Основы импульсной и цифровой техники. - СПб.: СПВВИУС, 1995. - 248 с, С. 194-196, рис. 6.9 (а)].
Промежуточный элемент И 24.6 блока анализа 24 предназначен для сравнения полученного результата идентификации и верификации (логический нуль или логическая единица) на k-м шаге (такте) цикла обучения с результатом идентификации и верификации (логический нуль или логическая единица), полученным на (k+1)-м шаге (такте) цикла обучения. Частный случай технической реализации промежуточного элемента И 12.6 описан в [Гусев В.В., Лебедев О.Н., Сидоров A.M. Основы импульсной и цифровой техники. - СПб.: СПВВИУС, 1995.-248 с, С. 13-14, рис. 1.2].
Элемент И 24.7 блока анализа 24 предназначен для подтверждения (собственно верификации) выявленной тенденции изменения вводимых обучаемым управляющих воздействий (объема потока микрокоманд (микроопераций) управления, которые, по своему характеру, не являются явными ошибками, но предопределяют плавный дрейф параметров объекта) в сторону граничного и аварийного (катастрофичного) состояния объекта управления, а также для реализации процедуры оповещения оператора (обучаемого, пользователя) о возможном катастрофическом состоянии. Элемент И 24.7 может быть технически реализован на основе типового логического элемента И, описанного в [Гусев В.В., Лебедев О.Н., Сидоров A.M. Основы импульсной и цифровой техники. - СПб.: СПВВИУС, 1995. - 248 с, С. 13-14, рис. 1.2].
Блок контроля 25 предназначен для формирования управляющей кодовой последовательности (состоящей из элементов множества NM (см. выражение (1), где Nm - допустимое для каждого m-ого состояния значение количества микрокоманд (микроопераций) управления, предопределяющих плавный дрейф параметров объекта в сторону катастрофы), при превышении значений которого объект с большой вероятностью перейдет в аварийное (катастрофичное) состояние из любого другого состояния, а также для формирования сигнала логического нуля или логической единицы, характеризующих соответственно запрещение или разрешение обучаемого (пользователя, оператора) на выдачу сигнала оповещения о наличии возможного катастрофического состояния объекта управления.
Блок контроля 25 (фиг. 3) состоит из проверочного ОЗУ 25.0 и счетчика 25.1. Тактовый выход 25.1-3 счетчика 25.1 подключен к тактовому входу 25.0-3 проверочного ОЗУ 25.0, сбрасывающий выход 25.0-2 которого подключен к сбрасывающему входу 25.1-2 счетчика 25.1, тактовый вход 25.1-1 которого является тактовым входом 253 блока контроля 25. Проверочный выход 25.0-4 проверочного ОЗУ 25.0 является выходом 252 блока контроля 25. Управляющий вход 25.0-1 проверочного ОЗУ 25.0 является управляющим входом 251 блока контроля 25 и входом «Ввод управления» устройства.
Проверочное ОЗУ 25.0 блока контроля 25 предназначено для записи, хранения и считывания в двоичном коде последовательности допустимых (пороговых) значений количества микрокоманд (микроопераций) управления, которые, не являясь ошибочными, тем не менее, предопределяют плавный дрейф параметров объекта в сторону аварийного состояния, а также записи логического нуля или логической единицы, характеризующих соответственно запрещение или разрешение обучаемого (пользователя, оператора) на выдачу сигнала оповещения о наличии возможного катастрофического состояния объекта управления. Техническая реализация проверочного ОЗУ 25.0 возможна на базе типового динамического ОЗУ, описанного в работе [Гусев В.В., Лебедев О.Н., Сидоров A.M. Основы импульсной и цифровой техники. - СПб.: СПВВИУС, 1995.-248 с, С. 194-196, рис. 6.9 (а)].
Счетчик 25.1 блока контроля 25 предназначен для определения моментов начала считывания в двоичном коде вновь введенных управляющих воздействий - новых допустимых (пороговых) значений количества микрокоманд (микроопераций) управления, которые, не являясь ошибочными, тем не менее, предопределяют плавный дрейф параметров объекта в сторону аварийного состояния, а также моментов начала считывания логического нуля или логической единицы, характеризующих соответственно запрещение или разрешение обучаемого (пользователя, оператора) на выдачу сигнала оповещения о наличии возможного катастрофического состояния объекта управления. Описание работы и схема такого счетчика известны и приведены, например, в работе [Мальцев П.П., Долидзе Н.С. и др. Цифровые интегральные микросхемы: справочник. - М.: Радио и связь, 1994, С. 64-65].
Блок задания программы обучения 1, входящий в общую структурную схему, предназначен для записи и хранения неизменяемых параметров алгоритма управления, отрабатываемого человеком-оператором. Состав блока задания программы обучения 1 и принцип его действия известны, схема подробно описана в прототипе (см. патент РФ №2281560, G09B 9/00, 2006, бюл. 22, рис. 5) и изображена на фиг. 4 данного описания.
Блок ответных действий оператора 2, входящий в общую структурную схему, предназначен для набора (формирования) оператором кода управляющего воздействия и передачи сформированного сигнала для проверки в соответствии с алгоритмом обучения. Блок ответных действий оператора 2 представляет собой типовую клавиатуру, которая в традиционном сочетании с панелью индикации 14 табло 4 (экраном, монитором) является физической моделью пульта оператора реальной АСУ. Структурная схема и принцип действия блока ответных действий оператора 2 известны и описаны, например, в прототипе (см. патент РФ №2281560, G09B 9/00, 2006, бюл. 22).
Главный блок сравнения 3, входящий в общую структурную схему, предназначен для оценки безошибочности сформированного оператором управляющего воздействия. Главный блок сравнения 3 представляет собой цифровой узел сравнения, описан в прототипе (см. патент РФ №2281560, G09B 9/00, 2006, бюл. 22) и может быть технически реализован в виде серийно выпускаемого узла сравнения (цифрового компаратора), как показано в работе [Гусев В.В., Лебедев О.Н., Сидоров A.M. Основы импульсной и цифровой техники. - СПб.: СПВВИУС, 1995. С. 149-152, рис. 5.19].
Табло 4, входящее в общую структурную схему, предназначено для индикации (визуализации в интересах обучаемого) состояния алгоритма управления, режима обучения (упражнение либо тренировка) и номера тренировки, на которой обучаемому удается завершить алгоритм управления без ошибок. Табло 4 состоит из объединенных в едином корпусе панели индикации 14, транспаранта «Упражнение» 15, транспаранта «Тренировка» 16 и индикатора номера тренировки 17. Состав элементов табло 4, их взаимосвязь и принцип их действия известны и описаны в прототипе (см. патент РФ №2281560, G09B 9/00, 2006, бюл. 22).
Элемент И 5, входящий в общую структурную схему, предназначен для регистрации ошибок оператора и коммутации счетного входа «Уст. «1» стартового счетчика 6 в интересах подсчета ошибок оператора. Элемент И 5 может быть технически реализован на основе серийно выпускаемого элемента И, описанного в [Гусев В.В., Лебедев О.Н., Сидоров A.M. Основы импульсной и цифровой техники. - СПб.: СПВВИУС, 1995. С. 13-14, рис. 1.2].
Стартовый счетчик 6, входящий в общую структурную схему, предназначен для подсчета числа ошибок, допущенных подряд на этапе тренировки оператора. Частный случай технической реализации стартового счетчика 6 описан в [Соботка 3., Стары Я. Микропроцессорные системы. - М.: Энергоиздат, 1981. С. 96-100].
Стартовый элемент ИЛИ 7, входящий в общую структурную схему, предназначен для объединения сигналов на установочный вход «Уст. «0» стартового счетчика 6 для его обнуления с началом обучения - с внешнего входа «Запуск» устройства и в случае безошибочного выполнения текущей операции - с первого выхода 33 главного блока сравнения 3. Стартовый элемент ИЛИ 7 может быть технически реализован на базе серийно выпускаемого элемента ИЛИ, подробно описанного в [Гусев В.В., Лебедев О.Н., Сидоров A.M. Основы импульсной и цифровой техники. - СПб.: СПВВИУС, 1995. С. 24-26, рис. 1.7].
Блоки стартовых 8 и опросных 10 элементов И, входящие в общую структурную схему, идентичны, а М однотипных элементов И (8.11-8.1М и 10.11- 10.1М соответственно), входящих в состав блоков стартовых 8 и опросных 10 элементов И, выполняют функции коммутирующих элементов при опросе содержимого соответственно стартового 6 и главного 11 счетчиков. Структура блоков стартовых 8 и опросных 10 элементов И известна, описана в прототипе (см. патент РФ №2281560, G09B 9/00, 2006, бюл. 22, рис. 6 и 7 соответственно) и проиллюстрирована на фиг. 5 и 6, а элементы И (8.11-8.1М и 10.11-10.1М), входящие в состав этих блоков, реализуются в виде известных и описанных в [Гусев В.В., Лебедев О.П., Сидоров A.M. Основы импульсной и цифровой техники. - СПб.: СПВВИУС, 1995. С. 13-14, рис. 1.2].
Триггер 9, входящий в общую структурную схему, предназначен для управления засветкой транспаранта «Упражнение» 15 или транспаранта «Тренировка» 16 табло 4 в соответствующем режиме обучения. Триггер 9 может быть технически реализован в виде серийно выпускаемого одноступенчатого триггера с коллекторно-базовыми связями, как показано в работе [Гусев В.В., Лебедев О.Н., Сидоров A.M. Основы импульсной и цифровой техники. - СПб.: СПВВИУС, 1995. С. 72-73, рис. 3.2 (б)].
Главный счетчик 11, входящий в общую структурную схему, предназначен для подсчета числа попыток, затраченных обучаемым до первого безошибочного выполнения алгоритма управления. Главный счетчик 11 может быть технически реализован в виде двоичного счетчика с последовательным переносом на Т-триггерах, его структура и принцип работы известны, описаны в прототипе (см. патент РФ №2281560, G09B 9/00, 2006, бюл. 22).
Дешифратор 12, входящий в общую структурную схему, предназначен для преобразования двоичного кода содержимого главного счетчика 11 в десятичный код в интересах представления (визуализации, показа) обучаемому номера попытки с помощью индикатора номера тренировки 17 табло 4. Дешифратор 12 может быть технически реализован в виде серийно выпускаемого дешифратора, его структура и принцип работы известны, описаны в прототипе (см. патент РФ №2281560, G09B 9/00, 2006, бюл. 22).
Главный элемент ИЛИ 13, входящий в общую структурную схему, предназначен для объединения первого управляющего входа 013 блока задания программы обучения 1 с внешним входом «Запуск» устройства и вторым выходом 34 главного блока сравнения 3 для инициализации начала новой тренировки после включения устройства или совершения обучаемым ошибки. Главный элемент ИЛИ 13 может быть технически реализован на базе серийно выпускаемого элемента ИЛИ, его структура и принцип работы известны, описаны в прототипе (см. патент РФ №2281560, G09B 9/00, 2006, бюл. 22).
Установочный элемент ИЛИ 18, входящий в общую структурную схему, предназначен для объединения внешнего входа «Запуск» устройства с выходом 193 ответного блока сравнения 19 в интересах перевода триггера 9 в единичное состояние и введения режима «Упражнение». Установочный элемент ИЛИ 18 реализуется в виде типового элемента ИЛИ, его структура и принцип работы известны, описаны в прототипе (см. патент РФ №2281560, G09B 9/00, 2006, бюл. 22).
Ответный блок сравнения 19, входящий в общую структурную схему, предназначен для сравнения числа явных ошибок, которые сделал обучаемый, с заранее предусмотренным допустимым числом явных ошибок. Ответный блок сравнения 19 может быть технически реализован в виде серийно выпускаемого узла сравнения (цифрового компаратора), его структура и принцип работы известны, описаны в прототипе (см. патент РФ №2281560, G098 9/00, 2006, бюл. 22).
Регистр числа 20, входящий в общую структурную схему, предназначен для сравнения изначального и вновь вводимого допустимого числа явных ошибок, их записи и хранения. Регистр числа 20 состоит из элемента сравнения 20.1 и элемента хранения 20.2, его принцип работы известен, схема подробно описана в прототипе (см. патент РФ №2281560, G09B 9/00, 2006, бюл. 22, рис. 4) и изображена на фиг. 7 данного описания.
Элемент задержки 21, входящий в общую структурную схему, предназначен для синхронизации моментов считывания информации с элементов И, входящих в состав блока стартовых элементов И 8 и из регистра числа 20 в ответный блок сравнения 19. Частным случаем технической реализации элемента задержки 21 может служить синхронный триггер задержки (D-триггер), его структура и принцип работы известны, подробно описаны в прототипе (см. патент РФ №2281560, G09B 9/00, 2006, бюл. 22).
Блок коррекции требований 22, входящий в общую структурную схему, предназначен для динамической коррекции количества разрешенных явных ошибок, допускаемых обучаемым подряд при отработке сложных алгоритмов управления. Он состоит из контроллера-регистратора 22.1 и элемента хранения нового числа 22.2, его принцип работы известен, схема подробно описана в прототипе (см. патент РФ №2281560, G09B 9/00, 2006, бюл. 22, рис. 2) и изображена на фиг. 8 данного описания.
Блок коррекции команд 23, входящий в общую структурную схему, предназначен для динамической коррекции микрокоманд обучения в соответствии с новым, вводимым в динамике управления обучением оператора, количеством разрешенных явных ошибок. Блок коррекции команд 23 состоит из элемента сравнения 23.1 и регистра корректированной микрокоманды 23.2, его принцип работы известен, схема подробно описана в прототипе (см. патент РФ №2281560, G09B 9/00, 2006, бюл. 22, рис. 3) и изображена на фиг. 9 данного описания.
Устройство для обучения операторов функционирует следующим образом.
Известно [1-5], что с точки зрения обеспечения повышения степени адекватности изучаемых ситуаций, повышение уровня достоверности среды и условий обучения, с точки зрения реализации процедур анализа и предупреждения оператора (обучаемого, пользователя) о возможном аварийном состоянии объекта управления, существует возможность, в рамках обучения операторов, производить идентификацию и верификацию граничных и аварийных (катастрофичных) состояний объекта управления при плавных изменениях параметров объекта, обусловленных предпринимаемыми обучаемым управляющими воздействиями (количеством микрокоманд (микроопераций) управления, предопределяющих плавный дрейф параметров объекта в сторону граничного и катастрофичного состояния).
Эта возможность реализуется на основе принципа динамического, пошагового (потактового) контроля значений (границ) количества микрокоманд (микроопераций) управления (не являющихся явно ошибочными, но, в совокупности, предопределяющих плавный дрейф параметров объекта в сторону граничного и катастрофичного состояния), с использованием методов теории катастроф.
Очевидно, что при обучении операторов, когда плавно изменяются параметры объекта управления под влиянием предпринимаемых обучаемыми управляющих воздействий, объективно изменяются во времени не только количество микрокоманд (микроопераций) управления, предопределяющих плавный дрейф параметров объекта в сторону граничного и катастрофичного состояния, но и текущие требования оператора (обучаемого, пользователя) к необходимости оповещения (предупреждения) о возможном аварийном состоянии объекта управления. В данных условиях, когда плавное изменение параметров может привести к скачкообразному изменению состояния объекта управления, затруднено надежное и устойчивое функционирование данного объекта, которое напрямую зависит от динамики управляющих воздействий, предпринимаемых обучаемым и обусловленных конкретной ситуацией.
Анализ работ [1-5], посвященных алгоритмам и принципам реализации методов теории катастроф в задачах управления функционированием сложных технических систем, позволяет сделать вывод о возможности осуществления, в рамках обучения операторов, адекватного изучения ситуаций, возможности повышения уровня достоверности среды и условий обучения на основе технической реализации процедур идентификации и верификации возможных граничных и аварийных (катастрофичных) состояний объекта управления в условиях непрерывной динамики плавного изменения интенсивности управляющих воздействий, плавного изменения количества вводимых микрокоманд (микроопераций) управления, которые, по своему характеру, не являются ошибочными, но при превышении которого, объект управления с большой вероятностью перейдет в аварийное (катастрофичное) состояние из любого другого состояния.
Построение устройства для обучения операторов на основе предложенного принципа работы позволяет получить преимущество перед прототипом, обеспечивая повышение степени адекватности изучаемых ситуаций, повышение уровня достоверности среды и условий обучения, когда в динамике обучения количество вводимых микрокоманд (микроопераций) управления может плавно изменяться под влиянием предпринимаемых обучаемым управляющих воздействий, создавая потенциальную угрозу блокировки (коллапса) объекта управления.
Техническая реализация принципа динамического, пошагового (потактового) контроля значений (границ) количества микрокоманд (микроопераций) управления, предопределяющих плавный дрейф параметров объекта в сторону аварийного состояния с использованием методов теории катастроф в заявленном устройстве осуществлена путем введения внешнего динамического управления значением допустимого количества таких микрокоманд (микроопераций) управления, при превышении значений которого объект управления с большой вероятностью перейдет в аварийное (катастрофичное) состояние из любого другого состояния (в заявленном устройстве - вход «Ввод управления» устройства и блок контроля 25), путем введения внешнего динамического управления формированием сигнала логического нуля или логической единицы, характеризующих соответственно запрещение или разрешение оператора (обучаемого, пользователя) на выдачу сигнала оповещения о наличии возможного катастрофического состояния объекта управления (в заявленном устройстве - вход «Ввод управления» устройства и блок контроля 25) и введения идентификации и верификации граничных и аварийных (катастрофичных) состояний управляемого объекта, а также формирования сигналов логического нуля или логической единицы (сигнала предсказания и предупреждения), характеризующих соответственно отсутствие или наличие возможного катастрофического состояния управляемого объекта (в заявленном устройстве реализованы в рамках блока анализа 24).
С учетом этого, в заявленном устройстве, наряду с коррекцией (управлением) количеством разрешенных явных ошибок, допускаемых обучаемым подряд при отработке сложных алгоритмов управления, осуществляется реализация идентификации и верификации граничных и аварийных (катастрофичных) состояний объекта управления, а также управляемое формирование значений допустимого количества микрокоманд (микроопераций) управления, не являющихся явно ошибочными, но предопределяющих плавный дрейф параметров объекта в сторону граничного и катастрофичного состояния, обуславливающие повышение степени адекватности изучаемых ситуаций, повышение уровня достоверности среды и условий, в которых функционирует реальный управляемый объект.
С включением устройства двоичный сигнал «1» (единица) с входа «Запуск» поступает на второй вход 182 установочного элемента ИЛИ 18, через первый вход 71 стартового элемента ИЛИ 7 на установочный вход «Уст. «0» стартового счетчика 6. на установочный вход «Уст. «0» главного счетчика 11 и на первый вход 131 главного элемента ИЛИ 13, с выхода 133 которого он подается на счетный вход «Уст. «1» главного счетчика И, записывая в нем «1» (единицу) и через первый управляющий вход 013 подается на первый вход 1.1-1 регистра адреса микрокоманды 1.1 блока задания программы обучения 1, который может быть реализован в соответствии со схемой, предложенной на фиг. 4. Регистр адреса микрокоманды 1.1 инициирует разрешение на выдачу адреса очередной микрокоманды, соответствующей первой операции алгоритма управления и со своих М выходов 1.1-31-1.1-3М в двоичном коде передает его на М входов 1.2-11-1.2-1М элемента памяти микропрограммы 1.2.
При получении этого сигнала в элементе памяти микропрограммы 1.2 блока 1 выбирается адрес микрокоманды, соответствующей первой операции алгоритма управления. Выбранная микрокоманда перезаписывается через М выходов 1.2-21-1.2-2М элемента памяти микропрограммы 1.2 на М входов 1.3-31-1.3-3м регистра микрокоманды 1.3 блока 1. Регистр микрокоманды 1.3 блока 1 выбирает соответствующую адресу микрооперацию управления.
С информационных выходов 1.321-1.32М регистра микрокоманды 1.3 через информационные выходы 0121-012М блока задания программы обучения 1 соответствующая адресу микрооперация управления в двоичном коде поступает на информационные входы 2311-231М блока коррекции команд 23, который может быть реализован в соответствии со схемой, изображенной на фиг. 9.
Если в ходе обучения операторов нет необходимости во внешнем динамическом управлении процессом обучения с указанием явных ошибок, нецелесообразно инициировать динамическую коррекцию разрешенного количества явных ошибок, допускаемых оператором (обучаемым) подряд при отработке алгоритмов управления (например, если оператор заведомо подготовлен слабо и повышать стартовый уровень сложности обучения нецелесообразно), на М (K1-Км) входах «Коррекция» устройства, а значит и на входах 2211-221М, корректирующих 2231-223М и контрольных 2221-222М выходах блока коррекции требований 22, а также на контрольных входах 2341-234М блока коррекции команд сигналы отсутствуют. При этом регистр числа 20 продолжает хранить в неизменном виде заранее записанное числовое значение начального (стартового) количества допустимых явных ошибок.
В этом случае блок коррекции команд 23, изображенный на фиг. 9, выступает в роли транзитного узла и функционирует следующим образом. Не получив через контрольные входы 2341-234М блока 23 на свои контрольные входы 23.1-21-23.1-2М никаких сигналов, и одновременно, получив через информационные входы 2311-231М на свои информационные входы 23.1-11-23.1-1М соответствующий код микрооперации управления от блока 1, элемент сравнения 23.1 идентифицирует данную микрооперацию управления как некорректируемую и транслирует (перезаписывает) ее через свои выходы 23.1-31-23.1-3М на входы 23.2-11-23.2-1М регистра корректированной микрокоманды 23.2 блока 23. При этом в элементе сравнения 23.1 проверка соответствия кодов, характеризующих начальное допустимое число явных ошибок и новое количество разрешенных явных ошибок не происходит. Регистр корректированной микрокоманды 23.2 блока 23 блокирует свои индикаторные выходы 23.2-21-23.2-2М и со своих информационных выходов 23.2-31-23.2-3М, через информационные выходы 2331-233М блока 23 отправляет в двоичном коде содержание данной некорректируемой микрооперации управления на информационные входы 321-32М главного блока сравнения 3. Вместе с этим, с индикаторных выходов 1.3-11-1.3-1М регистра микрокоманды 1.3 содержимое первой некорректируемой микрооперации через индикаторные выходы 0111-011М блока задания программы обучения 1 поступает на управляющие входы 2411-241М блока анализа 24 для начала осуществления процедур идентификации и верификации граничных и аварийных (катастрофичных) состояний объекта управления.
Если в ходе обучения операторов есть необходимость во внешнем динамическом управлении процессом обучения с указанием явных ошибок, целесообразно инициировать динамическую коррекцию разрешенного количества явных ошибок, допускаемых оператором (обучаемым) подряд при отработке алгоритмов управления, с внешнего устройства в двоичном коде (либо с помощью человека-инструктора (учителя), либо с помощью специального управляющего устройства), через М (К1-КМ) входов «Коррекция» устройства на входы 2211-221М блока коррекции требований 22 поступает новое, дополнительно вводимое в динамике управления обучением оператора, количество разрешенных явных ошибок.
Блок коррекции требований 22 описан в прототипе и может быть реализован в соответствии со схемой, изображенной на фиг. 8. Динамическая коррекция количества разрешенных явных ошибок, допускаемых обучаемым подряд при отработке сложных алгоритмов управления осуществляется в блоке 22, в итоге блок 22 со своих информационных выходов 2221-222М передает в двоичном коде содержание команды, характеризующей новое количество разрешенных явных ошибок, на контрольные входы 2341-234М блока 23 и через свои корректирующие выходы 2231-223М блока 22 на корректирующие входы 2031-203М регистра числа 20. Работа регистра числа 20 подробно описана в прототипе (см. патент РФ №2281560, G09B 9/00, 2006, бюл. 22), он может быть реализован в соответствии со схемой, изображенной на фиг. 7 и отвечает за сравнение изначального и вновь вводимого допустимого числа явных ошибок, их запись и хранение. В итоге, в ячейках памяти элемента хранения 20.2 регистра числа 20 в любой момент времени после запуска устройства (постоянно) хранится в двоичном коде либо заранее введенное (записанное) допустимое число явных ошибок (не задействована динамическая коррекция алгоритма обучения с указанием явных ошибок), либо новое, вводимое в динамике управления обучением оператора, количество разрешенных явных ошибок (задействован корректируемый алгоритм обучения с указанием явных ошибок).
С контрольных выходов 2221-222М блока 22 на контрольные входы 2341-234М блока 23 (фиг. 9) поступает в двоичном коде содержание команды, характеризующей новое количество разрешенных явных ошибок (код сигнала коррекции). Одновременно получив через информационные входы 2311-231М соответствующий код микрооперации управления от блока 1, блок коррекции команд 23 сравнивает эти коды (проверяет дидактическое соответствие количества разрешенных явных ошибок уровню сложности очередной микрооперации управления), и при их несовпадении идентифицирует данную микрооперацию управления как корректируемую и транслирует (перезаписывает) ее через свои выходы 23.1-31-23.1-3M на входы 23.2-11-23.2-1M регистра корректированной микрокоманды 23.2 блока 23.
В этом случае регистр корректированной микрокоманды 23.2 блока 23, реализуемый в виде реверсивного сдвигающего регистра для сдвига вправо (на JK-триггерах в режиме RS-триггеров), осуществляет динамическую коррекцию очередной обучающей микрокоманды -формирует на основе данных, хранящихся в ячейках памяти второй ступени JK-триггеров, код новой микрокоманды обучения (более сложной либо более простой), дидактически соответствующей новому, вводимому в динамике управления обучением оператора, количеству разрешенных явных ошибок. Код новой микрокоманды (микрооперации) обучения записывается в М ячеек памяти первой ступени JK-триггеров регистра корректированной микрокоманды 23.2 (фиг. 9).
Содержимое данной корректируемой микрооперации в двоичном коде поступает с индикаторных выходов 23.2-21-23.2-2М регистра корректированной микрокоманды 23.2 через индикаторные выходы 2321-232М блока 23 на управляющие входы 2411-241М блока анализа 24 для осуществления процедур идентификации и верификации граничных и аварийных (катастрофичных) состояний объекта управления. Одновременно с этим, содержимое корректируемой микрооперации в двоичном коде поступает с информационных выходов 2331-233М блока 23 на информационные входы 321-32М главного блока сравнения 3.
В случае совпадения кодов, когда налицо дидактическое соответствие нового количества разрешенных явных ошибок и уровня сложности очередной микрооперации управления, элемент сравнения 23.1 блока коррекции команд 23 идентифицирует данную микрооперацию управления как некорректируемую и реагирует так же, как и при отсутствии внешнего динамического управления процессом обучения (коррекция микрокоманд не нужна, изменилось и перезаписано в регистр числа 20 только количество разрешенных явных ошибок). При этом регистр корректированной микрокоманды 23.2 блока 23 блокирует свои индикаторные выходы 23.2-21-23.2-2М и со своих информационных выходов 23.2-31-23.2-3М, через информационные выходы 2331-233М блока 23 отправляет в двоичном коде содержание данной (некорректируемой) микрооперации управления на информационные входы 321-32М главного блока сравнения 3. Одновременно, как и в случае с отсутствием внешнего динамического управления процессом обучения, с индикаторных выходов 1.3-11-1.3-1М регистра микрокоманды 1.3 блока 1 содержимое первой (некорректируемой) микрооперации через индикаторные выходы 0111-011М блока задания программы обучения 1 поступает на управляющие входы 2411-241М блока анализа 24 для осуществления процедур идентификации и верификации граничных и аварийных (катастрофичных) состояний объекта управления.
Таким образом, на информационные входы 321-32М главного блока сравнения 3 с информационных выходов 2331-233М блока коррекции команд 23 поступает в двоичном коде содержимое (некорректируемой либо корректируемой) микрооперации управления, соответствующей очередному этапу выполнения алгоритма управления обучаемым. Одновременно с этим, либо с индикаторных выходов 0111-011М блока 1 (некорректируемое обучение с указанием явных ошибок), либо с индикаторных выходов 2321-232М блока 23 (динамически корректируемое обучение с указанием явных ошибок), на управляющие входы 2411-241М блока анализа 24 поступает в двоичном коде содержимое и ведется учет количества микрокоманд (микроопераций) управления, не являющихся явно ошибочными, но предопределяющих плавный дрейф параметров объекта в сторону граничного и катастрофичного состояния. После осуществления в блоке 24 процедур идентификации и верификации граничных и аварийных (катастрофичных) состояний объекта управления, содержимое (некорректируемых либо корректируемых) микроопераций управления с управляющих выходов 2421-242М блока анализа 24 поступают в двоичном коде на индикаторные входы 431-43М табло 4 и на входы 1411-141М панели индикации 14 в интересах визуализации информация о текущей операции алгоритма управления.
Таким образом, на управляющих входах 2411-241М блока анализа 24 имеем в двоичном коде не только содержимое, но и количество микрокоманд (микроопераций) управления, не являющихся явно ошибочными, но предопределяющих плавный дрейф параметров объекта в сторону граничного и катастрофичного состояния.
Динамическое управление значением допустимого количества таких микрокоманд (микроопераций) управления, при превышении которого объект управления с большой вероятностью перейдет в аварийное (катастрофичное) состояние из любого другого состояния, идентификация и верификация граничных и аварийных (катастрофичных) состояний объекта, а также формирование сигналов логического нуля или логической единицы (сигнала предсказания и предупреждения), характеризующих соответственно отсутствие или наличие возможного катастрофического состояния объекта управления, реализуется в рамках блока анализа 24 и блока контроля 25 следующим образом.
Блок контроля 25 (фиг. 3) предназначен для формирования управляющей кодовой последовательности (состоящей из элементов множества NM (см. выражение (1), где Nm - допустимое (пороговое, максимальное), a nm - реальное для каждого m-ого состояния объекта значение количества микрокоманд (микроопераций) управления, предопределяющих плавный дрейф параметров данного объекта в сторону катастрофы), при превышении значений которого объект управления с большой вероятностью перейдет в аварийное (катастрофичное) состояние из любого другого состояния, а также для формирования сигнала логического нуля или логической единицы, характеризующих соответственно запрещение или разрешение обучаемого (пользователя, оператора) на выдачу сигнала оповещения о наличии возможного катастрофического состояния объекта управления. Блок контроля 25 состоит из проверочного ОЗУ 25.0, счетчика 25.1 и может быть реализован по схеме, представленной на фиг. 3. Формирование управляющей кодовой последовательности допустимых значений количества микрокоманд (микроопераций) управления, предопределяющих плавный дрейф параметров объекта в сторону катастрофы, а также формирование сигнала логического нуля или логической единицы производится следующим образом. С внешнего источника через вход «Ввод управления» устройства, управляющий вход 251 блока контроля 25 и управляющий вход 25.0-1 в ячейки памяти проверочного ОЗУ 25.0 производится последовательная запись в двоичном коде набора допустимых (пороговых) значений количества не явно ошибочных, но угрожающих катастрофой в последствии, микрокоманд (микроопераций) управления, а также запись логического нуля или логической единицы, характеризующих соответственно запрещение или разрешение на выдачу сигнала оповещения о наличии возможного катастрофического состояния объекта управления.
Отсчеты шагов (тактов) в рамках цикла обучения, иными словами, шагов проверки (контроля) соответствия допустимых значений количества микрокоманд (микроопераций) управления, предопределяющих плавный дрейф параметров объекта в сторону катастрофы, их реальному количеству за цикл обучения, поступают с выхода 212 элемента задержки 21, являясь, по физической сущности, сигналами о наличии (сигналы «ошибка») или отсутствии в действиях оператора явной ошибки. Они поступают со второго выхода 34 главного блока сравнения 3 через элемент И 5 на счетный вход «Уст. «1» стартового счетчика 6 (увеличивая его содержимое на единицу), а также через элемент задержки 21 поступают на управляющий вход 201 регистра числа 20, на информационные входы 821-82М блока стартовых элементов И 8 и на тактовые входы 243 и 253 блока анализа 24 и блока контроля 25 соответственно, являясь тактами (шагами) отсчета в рамках цикла обучения. Данные сигналы (отсчеты) поступают через тактовый вход 253 блока контроля 25 на тактовый вход 25.1-1 счетчика 25.1 и определяют, поступая с тактового выхода 25.1-3 счетчика 25.1 на тактовый вход 25.0-3 проверочного ОЗУ 25.0, момент начала последовательного считывания в двоичном коде хранящейся в проверочном ОЗУ 25.0 NM - набора допустимых (пороговых) для любого m-ого состояния значений количества микрокоманд (микроопераций) управления, не являющихся явно ошибочными, но предопределяющих плавный дрейф параметров объекта в сторону аварийного (катастрофичного) состояния. Последовательное считывание осуществляется через проверочный выход 25.0-4 проверочного ОЗУ 25.0 и выход 252 блока контроля 25 на проверочный вход 24.2-2 ПЗУ 24.2 блока анализа 24 (фиг. 2), а также определяет момент начала считывания хранящегося в проверочном ОЗУ 25.0 логического нуля или логической единицы. Считывание логического нуля или логической единицы также производится с проверочного выхода 25.0-4 проверочного ОЗУ 25.0 и выхода 252 блока контроля 25 на второй вход 24.7-2 элемента И 24.7 блока анализа 24 (фиг. 2). Со сбрасывающего выхода 25.0-2 проверочного ОЗУ 25.0 (фиг. 3) на сбрасывающий вход 25.1-2 счетчика 25.1 в момент считывания последовательности допустимых (пороговых) значений количества микрокоманд (микроопераций) управления, не являющихся явно ошибочными, и считывания логического нуля (логической единицы) поступает сигнал, сбрасывающий значения счетчика 25.1 и дающий команду счетчику 25.1 начать новый отсчет для вновь введенных управляющих воздействий (NМ - последовательности допустимых (пороговых) для любого m-ого состояния значений количества микрокоманд (микроопераций) управления, не являющихся явно ошибочными, но предопределяющих плавный дрейф параметров объекта в сторону аварийного (катастрофичного) состояния, и для вновь введенных управляющих воздействий - логического нуля (логической единицы).
Блок анализа 24 предназначен для осуществления процедур идентификации и верификации граничных и аварийных (катастрофичных) состояний объекта управления при плавных изменениях параметров управляющих воздействий, предпринимаемых обучаемым, а также для выработки сигналов логического нуля или логической единицы (сигнала предсказания и предупреждения), характеризующих соответственно отсутствие или наличие возможного катастрофического состояния объекта. Блок анализа 24 может быть реализован по схеме, представленной на фиг. 2. Идентификация и верификация граничных и аварийных (катастрофичных) состояний объекта управления при плавных изменениях параметров управляющих воздействий, предпринимаемых обучаемым, а также выработка сигналов логического нуля или логической единицы (сигнала предсказания и предупреждения) осуществляется в блоке 24 следующим образом.
С индикаторных выходов 0111-011М блока 1 (некорректируемое обучение с указанием явных ошибок), либо с индикаторных выходов 2321-232М блока 23 (динамически корректируемое обучение с указанием явных ошибок) через управляющие входы 2411-241М блока анализа 24 на М управляющих входов 24.0-11-24.0-1М центрального ОЗУ 24.0 поступают в двоичном коде и записываются в ячейки памяти сигналы, характеризующие на (k+1)-м шаге цикла обучения как содержимое, так и количество микрокоманд (микроопераций) управления, не являющихся явно ошибочными, но предопределяющих плавный дрейф параметров объекта в сторону граничного и катастрофичного состояния (см. фиг. 2).
Со второго выхода 34 главного блока сравнения 3 через элемент задержки 21, через тактовый вход 243 блока 24 на тактовый вход 24.0-3 центрального ОЗУ 24.0 и на тактовый вход 24.2-1 ПЗУ 24.2 поступает тактовый сигнал - сигнал о наличии или отсутствии явной ошибки, инициируя последовательное считывание из ячеек памяти центрального ОЗУ 24.0 каждого n из N значений количества микрокоманд (микроопераций) управления, не являющихся явно ошибочными, но предопределяющих плавный дрейф параметров объекта в сторону граничного и катастрофичного состояния на (k+1)-м шаге обучения, а именно тех, которые соответствуют множеству (1) и имеют физический смысл превышения порога возможностей системы по надежности и устойчивости и, как следствие, высокой вероятности перехода объекта управления в аварийное (катастрофичное) состояние.
Значения количества n из общего числа N микрокоманд (микроопераций) управления, не являющихся явно ошибочными, но предопределяющих плавный дрейф параметров объекта в сторону граничного и катастрофичного состояния на (k+1)-м шаге обучения (для каждого m-го состояния - значения количества nm из общего числа Nm микрокоманд) последовательно считываются с каждого m-го из исполнительных выходов 24.0-41-24.0-4М центрального ОЗУ 24.0 на входы соответствующих m-х исполнительных ОЗУ 24.11-24.1 м, а также на первый вход 24.3-1 элемента итерационного сравнения 24.3 и на второй вход 24.4-2 элемента сравнения 24.4. С выхода каждого m-го из исполнительных ОЗУ 24.11-24.1М на второй вход 24.3-2 элемента итерационного сравнения 24.3 в двоичном коде последовательно считываются хранившиеся в ячейках памяти значения количества n из общего числа N микрокоманд (микроопераций) управления, не являющихся явно ошибочными, но предопределяющих плавный дрейф параметров объекта в сторону граничного и катастрофичного состояния (для каждого m-го состояния - значения количества nm из общего числа Nm микрокоманд) на k-м (предыдущем) шаге обучения. Кроме того, тактовый сигнал, поступающий с тактового входа 243 блока 24 на тактовый вход 24.2-1 ПЗУ 24.2, инициирует считывание в двоичном коде из ячеек памяти ПЗУ 24.2 на первый вход 24.4-1 элемента сравнения 24.4 заранее записанного допустимого значения количества микрокоманд (микроопераций) управления для любого m-го состояния, при превышении которого, в соответствии с выражением (2), объект с большой вероятностью перейдет в аварийное (катастрофичное) состояние из любого другого состояния. На базе элемента сравнения 24.4 осуществляется процедура идентификации граничных и аварийных (катастрофичных) состояний объекта управления. Данная процедура осуществляется путем последовательного (пошагового) априорного оценивания и сравнения значений количества каждого n из общего числа N микрокоманд (микроопераций) управления, не являющихся явно ошибочными, но предопределяющих плавный дрейф параметров объекта в сторону граничного и катастрофичного состояния (для каждого m-го состояния - значения количества nm из общего числа Nm микрокоманд, входящих в множество NМ (1)) на (k+1)-м шаге обучения, с целью определения наличия или отсутствия для каждого состояния возможного превышения этими значениями nm допустимого порога Nm в соответствии с выражением (2).
Таким образом, элемент сравнения 24.4 осуществляет пошаговое (потактовое) сравнение последовательно поступающих в двоичном коде с исполнительных выходов 24.0-41-24.0-4М центрального ОЗУ 24.0 значений каждого nm(k+1), со значением Nm, поступившим с выхода ПЗУ 24.2. Не превышение любым m-м (nm(k+1)) значением данного порога Nm, характеризует не выполнение условия (4) и результат процедуры идентификации (сравнения) выражается в появлении на выходе элемента сравнения 24.4 логического нуля, который в двоичном коде поступает на первый вход 24.7-1 элемента И 24.7. Превышение любым m-м (nm(k+1)) значением данного порога Nm, характеризует выполнение условия (4) и начало плавного изменения параметров объекта под влиянием реализуемых обучаемым управляющих воздействий - плавного изменения в критичную, угрожающую сторону количества микрокоманд (микроопераций) управления, не являющихся явно ошибочными (для каждого m-го состояния), а результат процедуры идентификации (сравнения) выражается в появлении на выходе элемента сравнения 24.4 логической единицы, которая в двоичном коде поступает на первый вход 24.7-1 элемента И 24.7.
На базе элемента итерационного сравнения 24.3, промежуточного ОЗУ 24.5 и промежуточного элемента И 24.6 осуществляется процедура верификации граничных и аварийных (катастрофичных) состояний объекта управления. Данная процедура осуществляется в два этапа. Первый этап осуществляется на базе элемента итерационного сравнения 24.3 путем последовательного пошагового (потактового) априорного оценивания и сравнения каждого m-го значения количества nm на данном k-м шаге обучения со значением количества nm на следующем (k+1)-м шаге в соответствии с выражением (3). С этой целью в элементе итерационного сравнения 24.3 осуществляется пошаговое сравнение последовательно и попарно поступающих в двоичном коде с выходов М исполнительных ОЗУ 24.11-24.1М каждого из значений nm(k) количества микрокоманд (микроопераций) управления на данном k-м шаге с соответствующими значениями nm(k+1) количества микрокоманд (микроопераций) управления на следующем (k+1)-м шаге, поступающими с исполнительных выходов 24.0-41-24.0-4М центрального ОЗУ 24.0. Не превышение любым m-м (nm(k+1)) из значений количества микрокоманд (микроопераций) управления, не являющихся явно ошибочными на (k+1)-м шаге соответствующего m-го (nm(k)) из значений количества микрокоманд (микроопераций) управления, не являющихся явно ошибочными на k-м (предыдущем) шаге, характеризует не выполнение условия (5) и результат первого этапа процедуры верификации (сравнения последующего значения с предыдущим) выражается в появлении на выходе элемента итерационного сравнения 24.3 логического нуля, который в двоичном коде поступает на вход промежуточного ОЗУ 24.5 и на второй вход 24.6-2 промежуточного элемента И 24.6. Превышение любым m-м (nm(k+1)) из значений количества микрокоманд (микроопераций) управления, не являющихся явно ошибочными на (k+1)-м шаге соответствующего m-го (nm(k)) из значений количества микрокоманд (микроопераций) управления, не являющихся явно ошибочными на k-м (предыдущем) шаге, характеризует выполнение условия (5). имеет физический смысл выявленной тенденции повышения вероятности изменения параметров объекта под влиянием реализуемых обучаемым управляющих воздействий в сторону граничного и аварийного (катастрофичного) состояния, а результат первого этапа процедуры верификации (сравнения последующего значения с предыдущим) выражается в появлении на выходе элемента итерационного сравнения 24.3 логической единицы, которая в двоичном коде поступает на вход промежуточного ОЗУ 24.5 и на второй вход 24.6-2 промежуточного элемента И 24.6.
Второй этап процедуры верификации в блоке 24 осуществляется на базе промежуточного ОЗУ 24.5 и промежуточного элемента И 24.6 путем сравнения в промежуточном элементе И 24.6 полученного на k-м шаге результата первого этапа (логический нуль или логическая единица), хранящегося в промежуточном ОЗУ 24.5 и поступающего на первый вход 24.6-1 промежуточного элемента И 24.6, с результатом первого этапа (логический нуль или логическая единица), полученным на (k+1)-м шаге обучения и поступающим с выхода элемента итерационного сравнения 24.3 на второй вход 24.6-2 промежуточного элемента И 24.6. Физический смысл второго этапа верификации заключается в подтверждении (собственно верификации) выявленной тенденции повышения вероятности изменения параметров объекта под влиянием реализуемых обучаемым управляющих воздействий в сторону граничного и аварийного (катастрофичного) состояния этого объекта, а результат второго этапа верификации выражается в появлении на выходе промежуточного элемента И 24.6 логической единицы или логического нуля, которые в двоичном коде поступают на первый вход 24.7-1 элемента И 24.7. Если полученный на k-м шаге результат первого этапа (например, логическая единица) совпадает с результатом первого этапа (логическая единица), полученным на (k+1)-м шаге, результат второго этапа процедуры верификации выражается в появлении на выходе промежуточного элемента И 24.6 логической единицы. Если полученный на k-м шаге результат первого этапа (например, логическая единица) не совпадает с результатом первого этапа (логическая единица), полученным на (k+1)-м шаге, или полученный на k-м шаге результат первого этапа представляет собой логический нуль и совпадает с результатом первого этапа (логический нуль), полученным на (k+1)-м шаге, результат второго этапа процедуры верификации выражается в появлении на выходе промежуточного элемента И 24.6 логического нуля.
Тактовый сигнал, поступающий на тактовый вход 253 блока контроля 25. инициирует считывание с проверочного выхода 252 блока контроля 25 через проверочный вход 244 блока анализа 24 на второй вход 24.7-2 элемента И 24.7 логического нуля или логической единицы, характеризующих соответственно запрещение или разрешение оператора (обучаемого, пользователя) на выдачу сигнала оповещения о наличии возможного катастрофического состояния объекта управления.
Если с проверочного входа 244 блока 24 на второй вход 24.7-2 элемента И 24.7 получена логическая единица (оповещение о возможном катастрофическом состоянии необходимо) и логическая единица получена с выхода элемента сравнения 24.4 или с выхода промежуточного элемента И 24.6, результат идентификации и верификации граничных и аварийных (катастрофичных) состояний объекта управления выражается в появлении на выходе элемента И 24.7 логической единицы. Логическая единица с выхода элемента И 24.7 поступает на считывающий вход 24.0-5 центрального ОЗУ 24.0 и запирает центральное ОЗУ 24.0. не позволяя идентифицированным и верифицированным сигналам, характеризующим как содержимое, так и количество микрокоманд (микроопераций) управления, считываться с управляющих выходов 24.0-21-24.0-2М центрального ОЗУ 24.0 через управляющие выходы 2421-242М блока анализа 24 (см. фиг. 1) на индикаторные входы 431-43М табло 4 и на входы 1411-141М панели индикации 14 в интересах визуализации для обучаемого информации о текущей операции алгоритма управления.
Кроме того, логическая единица с выхода элемента И 24.7 через предупредительный выход 245 блока 24 поступает на выход «Угроза» устройства, являясь сигналом предсказания и предупреждения, характеризующим наличие возможного катастрофического состояния объекта управления и призывающим обучаемого (пользователя, оператора) произвести внешнюю коррекцию количества микрокоманд (микроопераций) управления, не являющихся явно ошибочными, но предопределяющих плавный дрейф параметров объекта в сторону граничного и катастрофичного состояния (например, ввести временный запрет или принудительное ограничение на количество данных команд) или пороговых, допустимых значений количества таких микрокоманд (микроопераций) управления с целью не допустить аварийного (катастрофичного) скачкообразного изменения состояния объекта управления при малых возмущениях, обусловленных действиями обучаемого [2].
Если с проверочного входа 244 блока 24 (см. фиг. 2) на второй вход 24.7-2 элемента И 24.7 получен логический нуль (обучаемый не нуждается в оповещении о возможном катастрофическом состоянии), а с выхода элемента сравнения 24.4 или с выхода промежуточного элемента И 24.6 получен либо логический нуль, либо логическая единица, результат идентификации и верификации граничных и аварийных (катастрофичных) состояний объекта управления выражается в появлении на выходе элемента И 24.7 логического нуля. Если с проверочного входа 244 блока 24 на второй вход 24.7-2 элемента И 24.7 получена логическая единица (оповещение о возможном катастрофическом состоянии необходимо), а с выхода элемента сравнения 24.4 или с выхода промежуточного элемента И 24.6 получен логический нуль, результат идентификации и верификации граничных и аварийных (катастрофичных) состояний объекта выражается в появлении на выходе элемента И 24.7 логического нуля. Логический нуль с выхода элемента И 24.7 поступает на считывающий вход 24.0-5 центрального ОЗУ 24.0 и открывает центральное ОЗУ 24.0, позволяя идентифицированным и верифицированным сигналам, характеризующим как содержимое, так и количество микрокоманд (микроопераций) управления, не являющихся явно ошибочными, но предопределяющих плавный дрейф параметров объекта в сторону граничного и катастрофичного состояния, считываться с управляющих выходов 24.0-21-24.0-2М центрального ОЗУ 24.0 через управляющие выходы 2421-242М блока анализа 24 (см. фиг. 1) на индикаторные входы 431-43М табло 4 и на входы 1411-141М панели индикации 14 в интересах визуализации для обучаемого информации о текущей операции алгоритма управления.
Кроме того, логический нуль с выхода элемента И 24.7 через предупредительный выход 245 блока 24 поступает на выход «Угроза» устройства, являясь сигналом предсказания и предупреждения, характеризующим отсутствие возможного катастрофического состояния объекта управления. Таким образом, наличие на предупредительном выходе 245 блока анализа 24 и на выходе «Угроза» устройства сигнала логической единицы служит показателем блокировки устройства, а наличие на предупредительном выходе 245 блока 24 и на выходе «Угроза» сигнала логического нуля служит показателем разблокировки устройства для обучения операторов в целом.
Идентифицированные и верифицированные сигналы, характеризующие содержимое и количество микрокоманд (микроопераций) управления, через управляющие выходы 2421-242М блока анализа 24 (см. фиг. 1) поступают на индикаторные входы 431-43М табло 4 и на входы 1411-141М панели индикации 14, оповещая оператора и визуализируя в его интересах информацию о текущей операции алгоритма управления.
Оператор (обучаемый), воспринимая данную информацию, принимает к сведению, что идентификация и верификация граничных и аварийных (катастрофичных) состояний объекта в рамках текущей операции алгоритма управления осуществляется, предпринимает очередное управляющее воздействие, набирая на клавиатуре блока ответных действий оператора 2 код управляющего воздействия, формируя, тем самым, управленческое решение.
Код управляющего воздействия с М выходов 0211-021М блока ответных действий оператора 2 поступает на ответные входы 311-31М главного блока сравнения 3. Одновременно на информационные входы 321-32М главного блока сравнения 3 поступает в двоичном коде содержание очередной (некорректируемой либо корректируемой) микрооперации, выдаваемое с информационных выходов 2331-233М блока коррекции команд 23.
В главном блоке сравнения 3 оценивается безошибочность сформированного оператором управляющего воздействия путем сравнения кодов задействованного и требуемого управляющего воздействия, который поступает в блок 3 по информационным входам 321-32М в рамках очередной (некорректируемой либо корректируемой) микрооперации из регистра корректированной микрокоманды 23.2 блока 23. В случае совпадения кодов операция считается выполненной обучаемым без явных ошибок и бинарный сигнал «нет ошибки» появляется на первом выходе 33 блока 3, в противном случае, т.е. при явной ошибке в действиях оператора, сравнения поступивших кодов не происходит, а сигнал «ошибка» фиксируется на втором выходе 34 главного блока сравнения 3.
Сигнал «нет ошибки» с первого выхода 33 главного блока сравнения 3 поступает на второй вход 72 стартового элемента ИЛИ 7 и через второй управляющий вход 014 блока задания программы обучения 1 на второй вход 1.1-2 регистра адреса микрокоманды 1.1.
При этом в регистре адреса микрокоманды 1.1 блока задания программы обучения 1 происходит сдвиг к следующей ячейке регистра, где записан код адреса микрокоманды, соответствующей очередной операции алгоритма управления, и цикл работы устройства повторяется в описанном ранее порядке.
Если оператор (обучаемый) без явных ошибок завершает весь алгоритм управления, с контрольного выхода 1.1-4 регистра адреса микрокоманды 1.1 через контрольный выход 015 блока задания программы обучения 1 в двоичном коде поступает сигнал «нет ошибки» на информационные входы 1021-102М блока опросных элементов И 10, который может быть реализован в соответствии со схемой, предложенной на фиг. 6. Сигнал «нет ошибки», поступая на информационные входы 1021-102М блока опросных элементов И 10, инициирует передачу со своих выходов 1031-103М содержимого главного счетчика 11 (т.е. «1» - единицы), на входы 1221-122М дешифратора 12. Начальный сигнал «1» (единица) с выходов 1211-121M дешифратора 12 в десятичном коде поступает через информационные входы 441-44М табло 4 на входы 1711-171М индикатора номера тренировки 17 для отображения оператору.
Кроме того, если оператор без явных ошибок завершил весь алгоритм управления, с контрольного выхода 015 блока задания программы обучения 1 сигнал «нет ошибки» в двоичном коде также поступает на сбрасывающий вход 94 триггера 9, инициируя появление сигнала «нет ошибки» на его инверсном выходе 92. Данный сигнал «нет ошибки» в двоичном коде поступает через второй контрольный вход 42 табло 4 на вход 161 транспаранта «Тренировка» 16, засвечивая данный транспарант. Тем самым сигнализируется, что обучаемый переводится из режима «Упражнение» в режим «Тренировка».
В случае совершения оператором (обучаемым) явной ошибки в выполнении очередной операции, сигнал «ошибка» в двоичном коде появляется на втором выходе 34 главного блока сравнения 3. Данный сигнал поступает на второй вход 132 главного элемента ИЛИ 13 и далее, с его выхода 133 на счетный вход «Уст. «1» главного счетчика 11, добавляя к его содержимому еще одну единицу. Кроме того, данный сигнал с выхода 133 главного элемента ИЛИ 13 поступает через первый управляющий вход 013 на первый вход 1.1-1 регистра адреса микрокоманды 1.1 блока задания программы обучения 1, возвращая обучаемого в новой тренировке к первой операции алгоритма. При этом транспарант «Упражнение» 15 остается засвеченным, тем самым сигнализируя оператору, что он не переведен на новый режим обучения. Процесс продолжается до тех пор, пока обучаемый не завершает весь алгоритм управления без явных ошибок и сигнал «нет ошибки» не появляется на контрольном выходе 1.1-4 регистра адреса микрокоманды 1.1 и на контрольном выходе 015 блока 1, поступая на сбрасывающий вход 94 триггера 9 и инициируя засвечивание транспаранта «Тренировка» 16.
Если же обучаемый в своей последующей деятельности (т.е. уже в режиме «Тренировка») совершает явные ошибки, значит, он был переведен с режима «Упражнение» на режим «Тренировка» преждевременно либо случайно, и ключевым критерием подготовленности оператора может стать количество явных ошибок, допущенных подряд. В любом случае - не совершения или совершения оператором явной ошибки, сигнал о наличии (сигнал «ошибка») или отсутствии явной ошибки с второго выхода 34 главного блока сравнения 3 через элемент И 5 поступает на счетный вход «Уст. «1» стартового счетчика 6, увеличивая его содержимое на единицу. Этот же сигнал о наличии (сигнал «ошибка») или отсутствии явной ошибки со второго выхода 34 главного блока сравнения 3 через элемент задержки 21 поступает на тактовые входы 243 и 253 блока анализа 24 и блока контроля 25 соответственно (являясь тактами (шагами) отсчета в рамках цикла обучения), на управляющий вход 201 регистра числа 20 и на информационные входы 821-82М блока стартовых элементов И 8, который может быть реализован в соответствии со схемой, предложенной на фиг. 5.
Сигнал «ошибка» формируется (инициируется) на выходах 831-83М блока стартовых элементов И 8 при увеличении содержимого стартового счетчика 6 на единицу и поступает на информационные входы 1911-191М ответного блока сравнения 19, в котором производится сравнение числа допущенных и разрешенных подряд явных ошибок.
Если количество допущенных и количество разрешенных на данный момент (некоррелированное либо откорректированное число, записанное и хранимое в регистре числа 20) явных ошибок не совпадает (допущенных явных ошибок меньше), а на предупредительном выходе 245 блока 24 и на выходе «Угроза» устройства присутствует логический нуль, являющийся результатом идентификации и верификации - сигналом предсказания и предупреждения, характеризующим отсутствие возможного катастрофического состояния объекта управления, то цикл обучения продолжается в соответствии с ранее описанным порядком за исключением того, что если после явной ошибки очередное действие выполняется оператором правильно, то сигналом с первого выхода 33 главного блока сравнения 3 через стартовый элемент ИЛИ 7 содержимое стартового счетчика 6 обнуляется. Данный сигнал об отсутствии явной ошибки является аналогом сигнала, поступающего (наряду с сигналом «ошибка») со второго выхода 34 главного блока сравнения 3. Таким образом, наряду с введенными процедурами идентификации и верификации, реализуются и процедуры, заложенная в прототипе - подсчитывается количество явных ошибок допущенных оператором подряд как при отработке навыков с учетом динамики функционирования объекта управления (динамики смены пороговых значений состояний АСУ) - с коррекцией, так и при отработке обучаемым навыков без учета данных факторов - без коррекции.
Если количество допущенных и разрешенных на данный момент подряд явных ошибок (некорректированное либо откорректированное число, записанное и хранимое в регистре числа 20) совпадает, а на предупредительном выходе 245 блока 24 и на выходе «Угроза» устройства присутствует логический нуль, являющийся результатом идентификации и верификации - сигналом предсказания и предупреждения, характеризующим отсутствие возможного катастрофического состояния объекта управления, то бинарный сигнал «ошибка» с выхода 193 ответного блока сравнения 19 поступает через установочный элемент ИЛИ 18 на установочный вход 93 триггера 9. Триггер 9 передает данный сигнал в двоичном коде со своего прямого выхода 91, через первый контрольный вход 41 табло 4 на вход 151 транспаранта «Упражнение», инициируя засвечивание данного транспаранта и возвращая, тем самым, обучаемого на режим «Упражнение».
Если количество допущенных и количество разрешенных на данный момент (некорректированное либо откорректированное число, записанное и хранимое в регистре числа 20) явных ошибок не совпадает (явных ошибок нет или мало), либо совпадает (явных ошибок много), но на предупредительном выходе 245 блока 24 и на выходе «Угроза» устройства присутствует логическая единица, это является показателем блокировки устройства, сигналом предсказания и предупреждения, характеризующим наличие возможного катастрофического состояния объекта управления и требует от обучаемого (пользователя, оператора) проведения внешней коррекции требуемого количества микрокоманд (микроопераций) управления, не являющихся явно ошибочными, но предопределяющих плавный дрейф параметров объекта в сторону граничного и катастрофичного состояния, с целью не допустить аварийного (катастрофичного) скачкообразного изменения состояния объекта управления при малых возмущениях, обусловленных действиями обучаемого [2].
В итоге, в рамках контроля результатов обучения и закрепления навыков оператора, на каждом этапе обучающего алгоритма управления, помимо бинарного сигнала «нет ошибки» на первом 33 выходе главного блока сравнения 3, либо записанного в двоичном коде сигнала «ошибка» - на выходе 193 ответного блока сравнения 19, характеризующих оценку правильности (без явных ошибок) действий обучаемого, имеем на предупредительном выходе 245 блока 24 и на выходе «Угроза» устройства в двоичном коде логический ноль или логическую единицу, полученные на основе идентификации и верификации состояний объекта управления с использованием методов теории катастроф и характеризующие соответственно отсутствие или наличие вызванного действиями обучаемого плавного дрейфа параметров данного объекта в сторону граничного и катастрофичного состояния.
Анализ принципа работы заявляемого устройства для обучения операторов показывает очевидность того факта, что наряду с сохраненными возможностями по анализу действий оператора на основе динамически корректируемого количества разрешенных явных ошибок, допускаемых обучаемым, устройство способно реализовывать алгоритм обучения в условиях возникновения граничных и аварийных (катастрофичных) состояний объекта управления, при плавных изменениях параметров данного объекта под влиянием предпринимаемых обучаемым управляющих воздействий (микрокоманд (микроопераций)), которые, по своему характеру, не являются ошибочными, но обеспечивают высокую вероятность перехода объекта управления в аварийное (катастрофичное) состояние из любого другого состояния. Помимо этого, заявленное устройство способно оповещать (предупреждать) обучаемого (пользователя, оператора) объекта управления об его возможном аварийном состоянии на основе данных идентификации и верификации.
Данное устройство обеспечивает повышение степени адекватности изучаемых ситуаций, повышение уровня достоверности среды и условий обучения, когда в динамике обучения количество вводимых микрокоманд (микроопераций) управления может плавно изменяться под влиянием предпринимаемых обучаемым управляющих воздействий, создавая потенциальную угрозу блокировки (коллапса) объекта управления. Это что существенно расширяет область применения устройства, расширяет функциональные возможности тренажерной аппаратуры, где заявленное устройство для обучения операторов будет использовано.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Арнольд В.И. Теория катастроф. - М.: Наука, 1990. - 128 с;
2. Постон Т., Стюарт И. Теория катастроф и ее приложения. Пер. с англ. - М.: Мир, 1980. - 608 с;
3. Петров Ю.П., Петров Л.Ю. Неожиданное в математике и его связь с авариями и катастрофами последних лет. - СПб.: НИИХ СпбГУ, 1999. - 108 с;
4. Паращук И.Б., Дьяков СВ. Математика теории катастроф применительно к задачам анализа надежности элементов сети связи. / Системы связи. Анализ. Синтез. Управление. / Под ред. проф. Постюшкова В.П. Выпуск 5. - СПб.: Изд-во «Тема», 2001. - 84 с, С. 47-49;
5. Паращук И.Б., Дьяков С.В. Перспективы оценки устойчивости телекоммуникационных сетей с использованием методов теории катастроф. // 56-я научно-техническая конференция, посвященная Дню радио. Материалы конференции. - СПб.: СПбГЭТУ «ЛЭТИ», 2001 г., С. 56-57.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕРОЯТНОСТНЫЙ АВТОМАТ | 2001 |
|
RU2195697C1 |
| УСТРОЙСТВО ДЛЯ ОБУЧЕНИЯ ОПЕРАТОРОВ | 2005 |
|
RU2286605C1 |
| УСТРОЙСТВО ДЛЯ ОБУЧЕНИЯ ОПЕРАТОРОВ | 2005 |
|
RU2281561C1 |
| УСТРОЙСТВО ОБСЛУЖИВАНИЯ РАЗНОПРИОРИТЕТНЫХ ЗАПРОСОВ АБОНЕНТОВ ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ | 2015 |
|
RU2589363C1 |
| УСТРОЙСТВО ДЛЯ ОБУЧЕНИЯ ОПЕРАТОРОВ | 2005 |
|
RU2281560C1 |
| УСТРОЙСТВО ДЛЯ ПАРАМЕТРИЧЕСКОЙ ОЦЕНКИ ЗАКОНА РАСПРЕДЕЛЕНИЯ ПОТОКОВ СООБЩЕНИЙ | 2020 |
|
RU2750287C1 |
| УСТРОЙСТВО ПОИСКА ИНФОРМАЦИИ | 2022 |
|
RU2792840C1 |
| Устройство для прогнозирования случайных событий | 2019 |
|
RU2705010C1 |
| Устройство для обучения операторов | 1986 |
|
SU1320833A1 |
| Устройство для обучения операторов | 1987 |
|
SU1492366A1 |
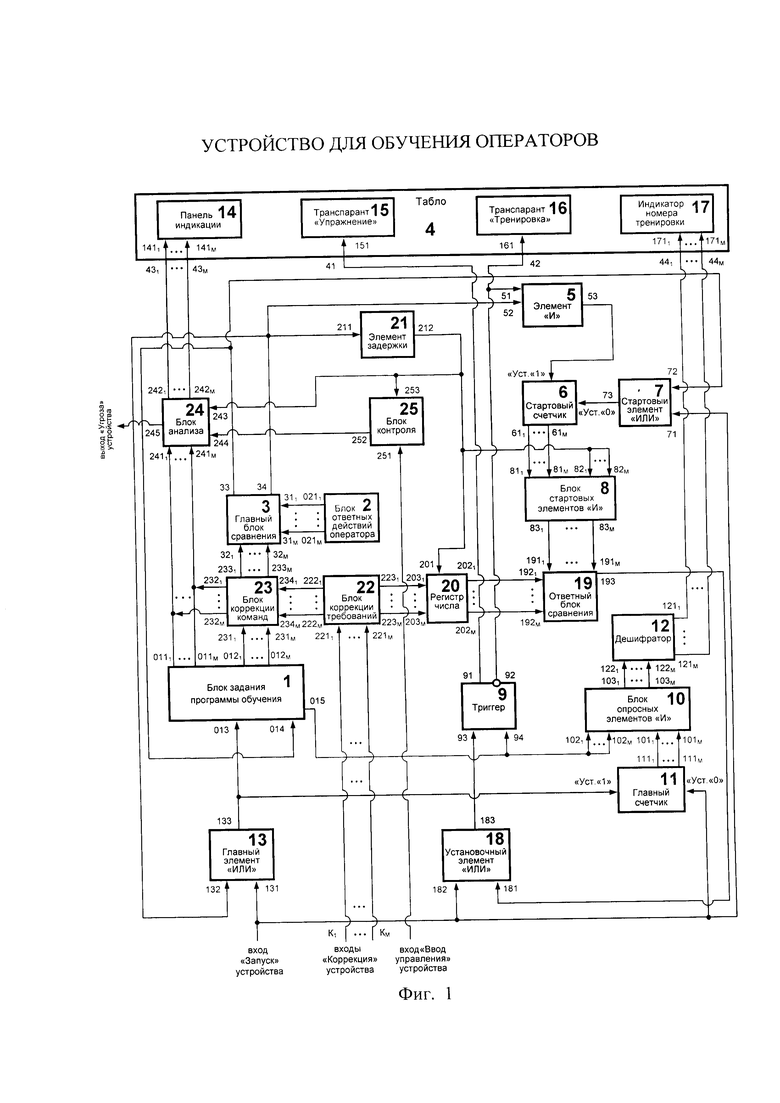
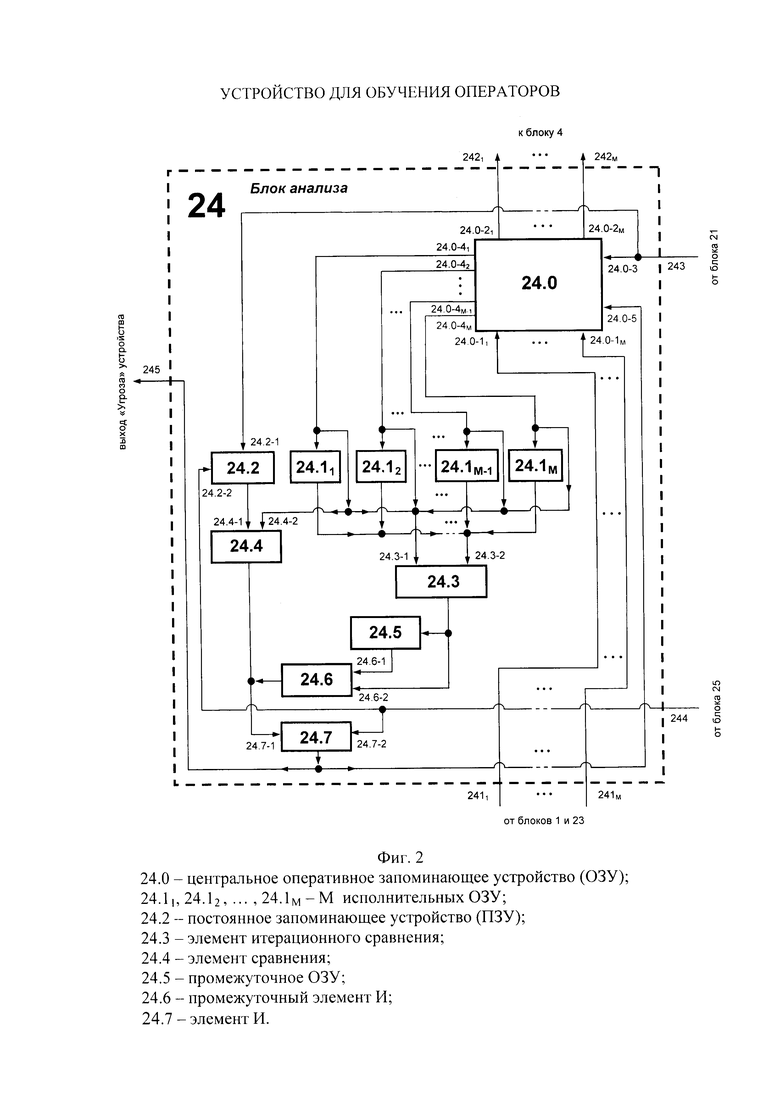
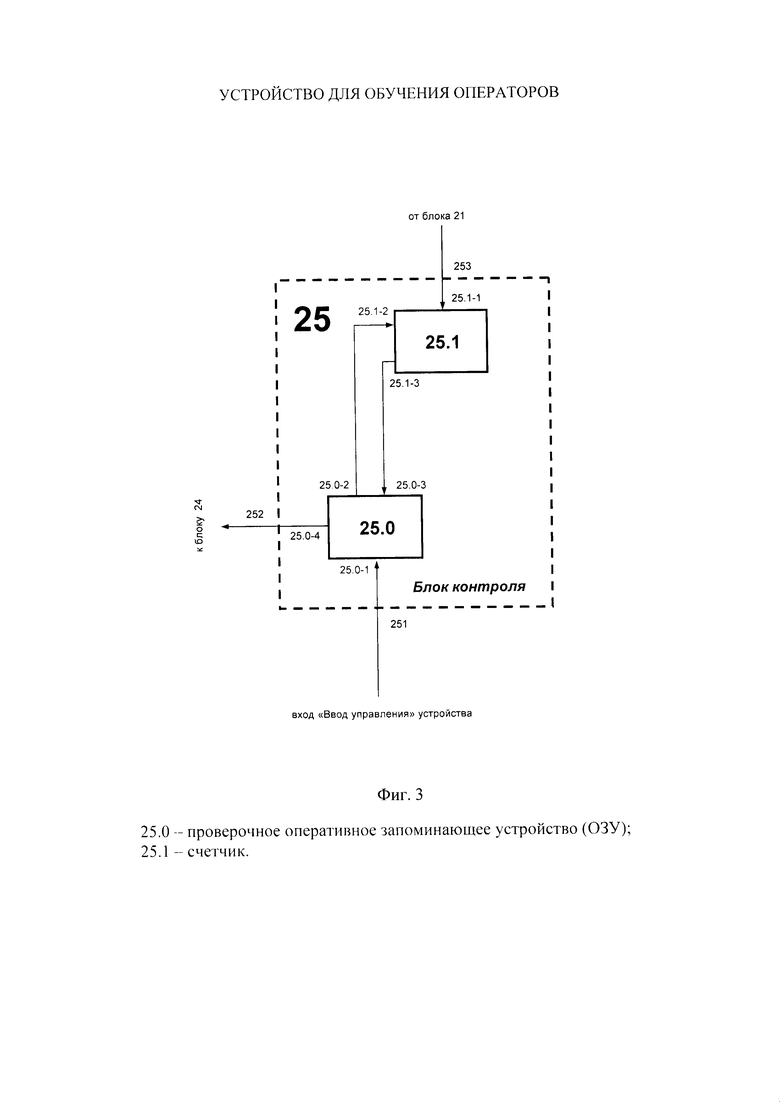
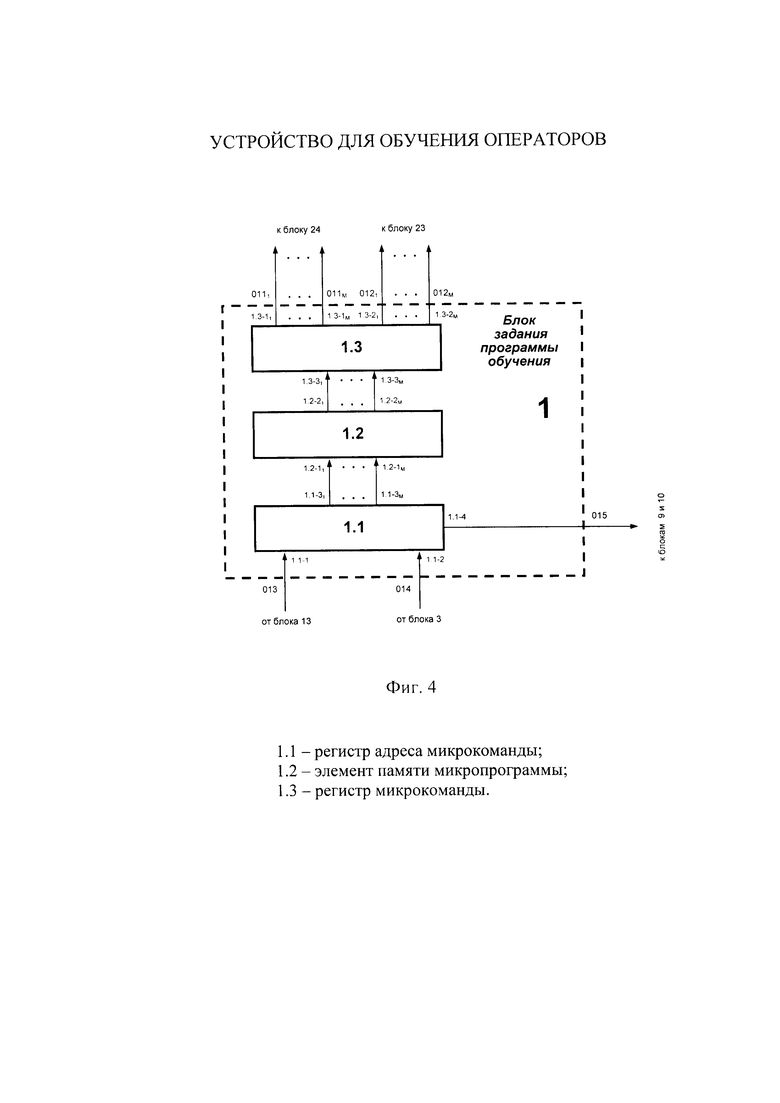
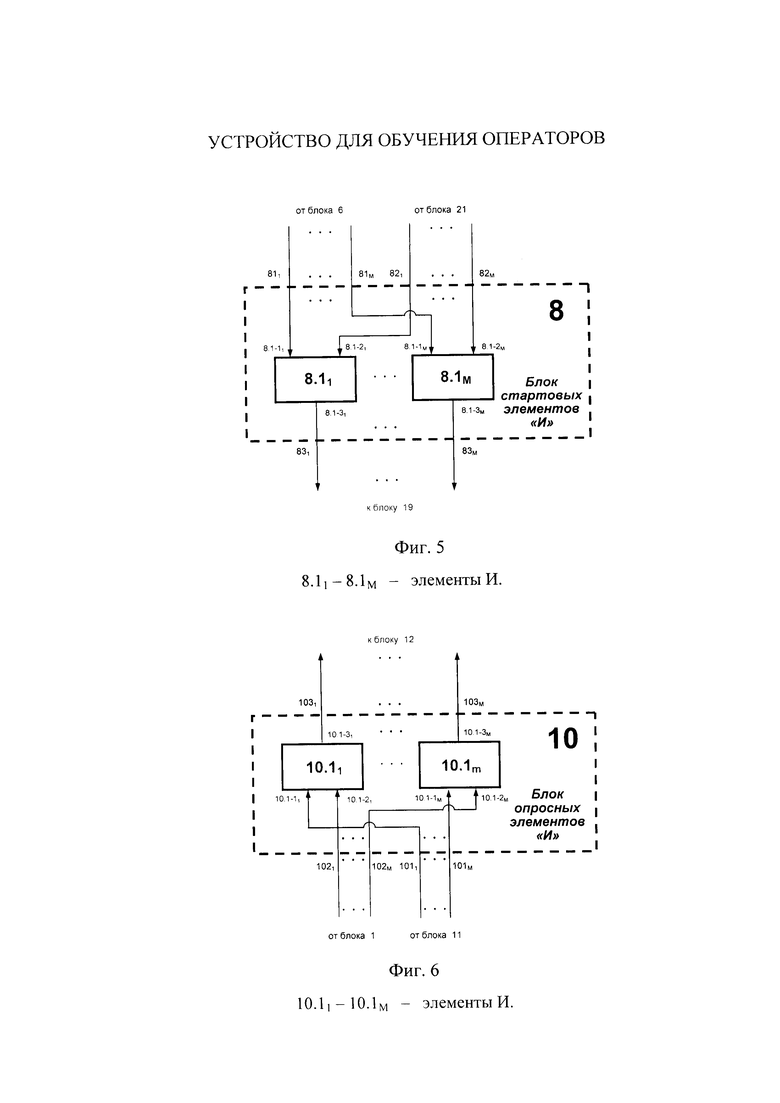
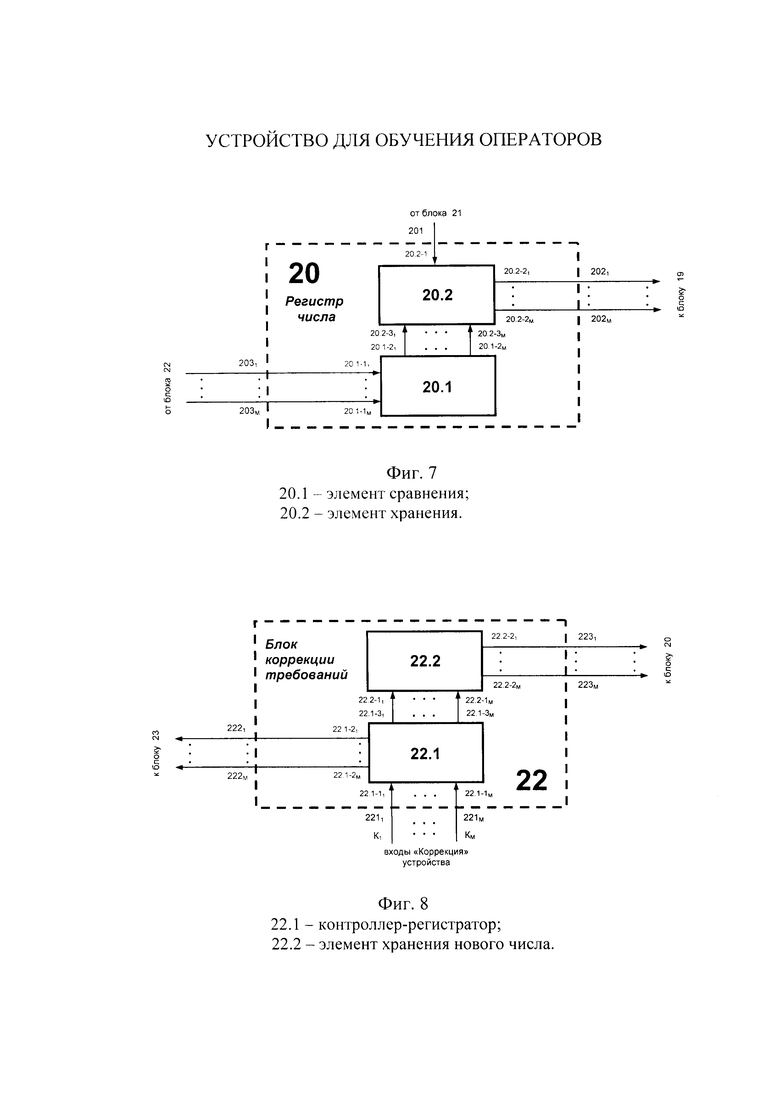
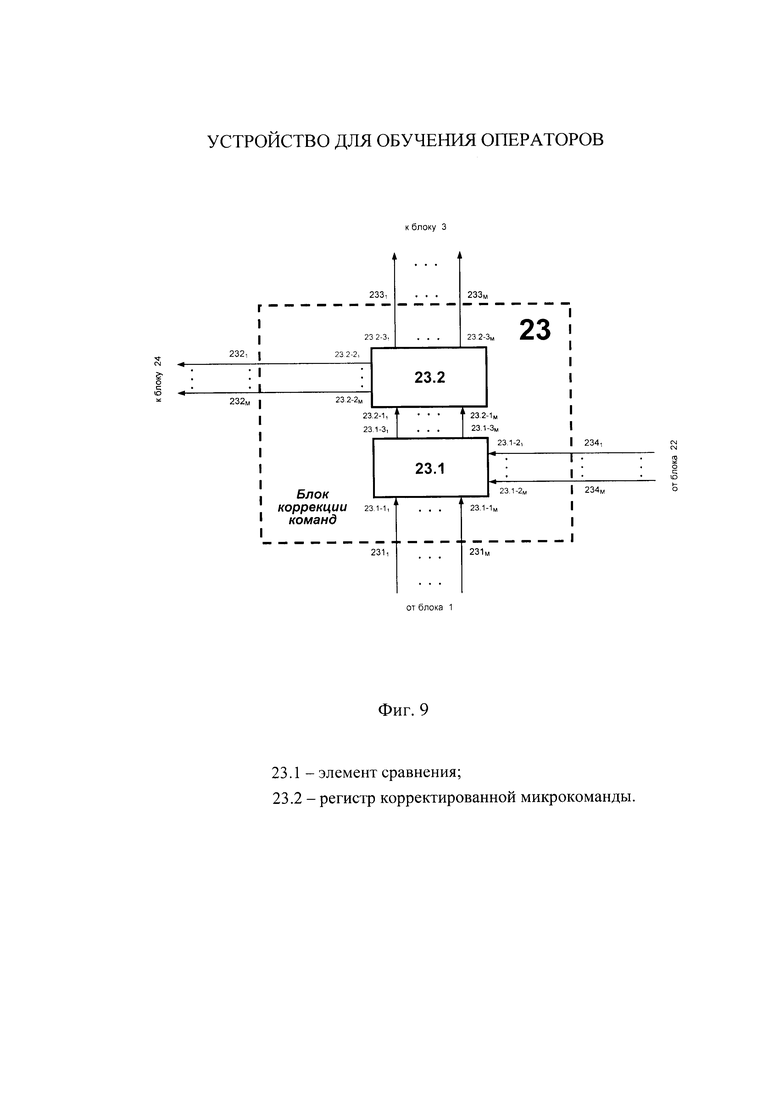
Устройство для обучения операторов содержит блок задания программы обучения, блок ответных действий оператора, три элемента ИЛИ, элемент задержки, два блока сравнения, два блока элементов И, регистр числа, два счетчика, дешифратор, триггер, элемент И, блок коррекции требований, блок коррекции команд, табло, блок анализа, блок контроля, соединенные определенным образом. Блок анализа содержит оперативное (ОЗУ) и постоянное (ПЗУ) запоминающие устройства, М исполнительных ОЗУ, элемент итерационного сравнения, элемент сравнения, промежуточное ОЗУ, промежуточный элемент И, элемент И, соединенные определенным образом. Блок контроля содержит проверочное ОЗУ и счетчик. Обеспечивается обучение операторов с возможностью их оповещения (предупреждения) о возможном аварийном состоянии системы на основе полученных данных идентификации и верификации. 2 з.п. ф-лы, 9 ил.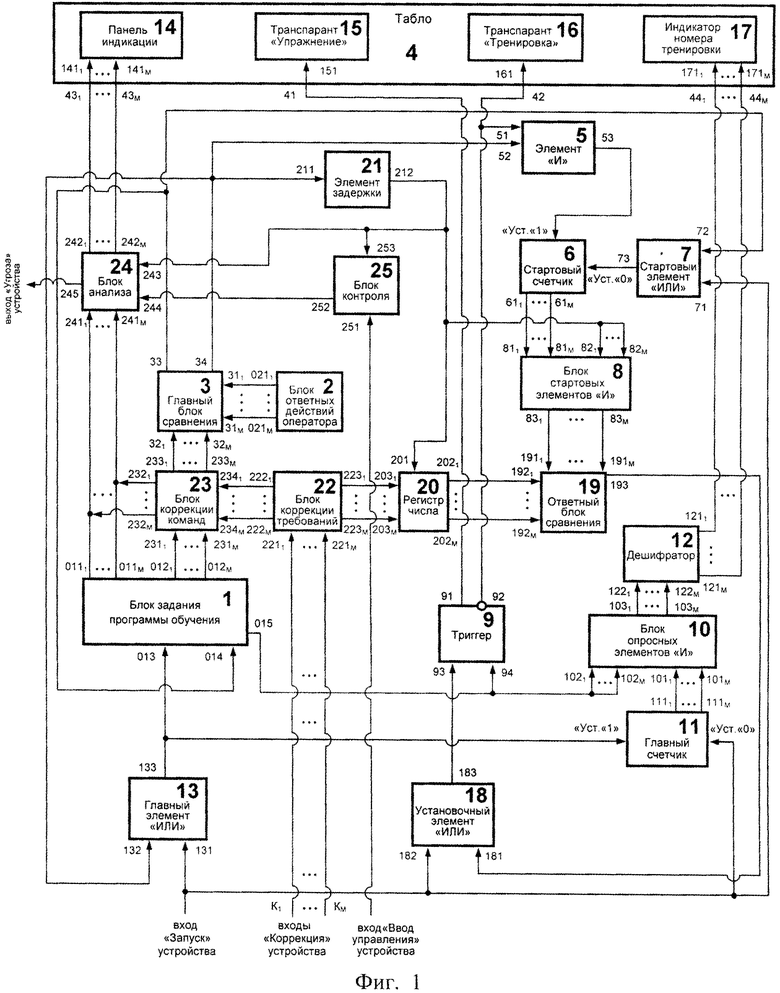
1. Устройство для обучения операторов, содержащее блок задания программы обучения (1), блок ответных действий оператора (2), стартовый (7), главный (13) и установочный (18) элементы ИЛИ, элемент задержки (21), главный (3) и ответный (19) блоки сравнения, блоки стартовых (8) и опросных (10) элементов И, регистр числа (20), стартовый (6) и главный (11) счетчики, дешифратор (12), триггер (9), элемент И (5), блок коррекции требований (22), блок коррекции команд (23) и табло (4), M≥2 информационных входов (441-44M) которого соединены с соответствующими M выходами (1211-121M) дешифратора (12), M входов (1221-122M) которого подключены к соответствующим M выходам (1031-103M) блока опросных элементов И (10), M счетных входов (1011-101M) которого соединены с соответствующими M выходами (1111-111M) главного счетчика (11), установочный вход «Уст. «0» которого соединен с первым входом (71) стартового элемента ИЛИ (7), вторым входом (182) установочного элемента ИЛИ (18), первым входом (131) главного элемента ИЛИ (13) и является входом «Запуск» устройства, выход (133) главного элемента ИЛИ (13) подключен к счетному входу «Уст. «1» главного счетчика (11) и первому управляющему входу (013) блока задания программы обучения (1), первый контрольный вход (41) табло (4) подключен к прямому выходу (91) триггера (9), инверсный выход (92) которого соединен с первым входом (51) элемента И (5) и вторым контрольным входом (42) табло (4), первый выход (33) главного блока сравнения (3) соединен со вторым входом (72) стартового элемента ИЛИ (7) и вторым управляющим входом (014) блока задания программы обучения (1), второй выход (34) главного блока сравнения (3) подключен ко второму входу (132) главного элемента ИЛИ (13), входу (211) элемента задержки (21) и второму входу (52) элемента И (5), выход (53) которого соединен со счетным входом «Уст. «1» стартового счетчика (6), установочный вход «Уст. «0» которого подключен к выходу (73) стартового элемента ИЛИ (7), M счетных входов (811-81M) блока стартовых элементов И (8) соединены с соответствующими M выходами (611-61M) стартового счетчика (6), M выходов (831-83M) блока стартовых элементов И (8) подключены к соответствующим M информационным входам (191-191M) ответного блока сравнения (19), M ответных входов (1921-192M) которого соединены с соответствующими M выходами (2021-202M) регистра числа (20), выход (193) ответного блока сравнения (19) подключен к первому входу (181) установочного элемента ИЛИ (18), выход (183) которого соединен с установочным входом (93) триггера (9), сбрасывающий вход (94) которого подключен к контрольному выходу (015) блока задания программы обучения (1) и к M информационным входам (1021-102M) блока опросных элементов И (10), M выходов (0211-021M) блока ответных действий оператора (2) подключены к соответствующим M ответным входам (311-31M) главного блока сравнения (3), M информационных выходов (2331-233M) блока коррекции команд (23) соединены с соответствующими M информационными входами (321-32M) главного блока сравнения (3), M информационных входов (2311-231M) блока коррекции команд (23) подключены к соответствующим M информационным выходам (0121-012M) блока задания программы обучения (1), M контрольных входов (2341-234M) блока коррекции команд (23) соединены с соответствующими M контрольными выходами (2221-222M) блока коррекции требований (22), M корректирующих входов (2031-203M) регистра числа (20) подключены к соответствующим M корректирующим выходам (2231-223M) блока коррекции требований (22), M входов (2211-221M) которого являются соответствующими M входами (К1-КM) «Коррекция» устройства, первый контрольный вход (41) табло (4) соединен с входом (151) транспаранта «Упражнение» (15), второй контрольный вход (42) табло (4) подключен к входу транспаранта «Тренировка» (16), а M информационных входов (441-44M) табло (4) соединены с соответствующими M входами (1711-171M) индикатора номера тренировки (17), отличающееся тем, что дополнительно введены блок анализа (24) и блок контроля (25), при этом выход (212) элемента задержки (21) соединен с управляющим входом (201) регистра числа (20), с M информационными входами (821-82M) блока стартовых элементов И (8), с тактовым входом (253) блока контроля (25) и тактовым входом (243) блока анализа (24), проверочный вход (244) которого подключен к выходу (252) блока контроля (25), управляющий вход (251) которого является входом «Ввод управления» устройства, M индикаторных выходов (0111-011M) блока задания программы обучения (1) соединены с соответствующими M индикаторными выходами (2321-232M) блока коррекции команд (23) и подключены к соответствующим M управляющим входам (2411-241M) блока анализа (24), M управляющих выходов (2421-242M) которого подключены к соответствующим M индикаторным входам (431-43M) табло (4), которые соединены с соответствующими M входами (1411-141M) панели индикации (14), а предупреждающий выход (245) блока анализа (24) является выходом «Угроза» устройства.
2. Устройство для обучения операторов по п. 1, отличающееся тем, что блок анализа (24) состоит из центрального оперативного запоминающего устройства (ОЗУ) (24.0), M исполнительных ОЗУ (24.11-24.1M), постоянного запоминающего устройства (ПЗУ) (24.2), элемента итерационного сравнения (24.3), элемента сравнения (24.4), промежуточного ОЗУ (24.5), промежуточного элемента И (24.6) и элемента И (24.7), при этом M управляющих входов (24.0-11-24.0-1M) центрального ОЗУ (24.0) являются соответствующими M управляющими входами (2411-241M) блока анализа (24), M управляющих выходов (24.0-21-24.0-2M) центрального ОЗУ (24.0) являются соответствующими M управляющими выходами (2421-242M) блока анализа (24), тактовый вход (24.0-3) центрального ОЗУ (24.0) подключен к тактовому входу (24.2-1) ПЗУ (24.2) и является тактовым входом (243) блока анализа (24), M исполнительных выходов (24.0-41-24.0-4M) центрального ОЗУ (24) подключены к входам M соответствующих исполнительных ОЗУ (24.11-24.1M), входы M исполнительных ОЗУ (24.11-24.1M) объединены и подключены к первому входу (24.3-1) элемента итерационного сравнения (24.3) и второму входу (24.4-2) элемента сравнения (24.4), выходы M исполнительных ОЗУ (24.11-24.1M) объединены и подключены ко второму входу (24.3-2) элемента итерационного сравнения (24.3), выход ПЗУ (24.2) соединен с первым входом (24.4-1) элемента сравнения (24.4), выход элемента итерационного сравнения (24.3) подключен к входу промежуточного ОЗУ (24.5) и второму входу (24.6-2) промежуточного элемента И (24.6), первый вход (24.6-1) которого соединен с выходом промежуточного ОЗУ (24.5), выход промежуточного элемента И (24.6) соединен с выходом элемента сравнения (24.4) и первым входом (24.7-1) элемента И (24.7), второй вход (24.7-2) которого подключен к проверочному входу (24.2-2) ПЗУ (24.2) и является проверочным входом (244) блока анализа (24), выход элемента И (24.7) соединен со считывающим входом (24.0-5) центрального ОЗУ (24.0) и является предупредительным выходом (245) блока анализа (24) и выходом «Угроза» устройства.
3. Устройство для обучения операторов по п. 1, отличающееся тем, что блок контроля (25) состоит из проверочного ОЗУ (25.0) и счетчика (25.1), при этом тактовый выход (25.1-3) счетчика (25.1) подключен к тактовому входу (25.0-3) проверочного ОЗУ (25.0), сбрасывающий выход (25.0-2) которого подключен к сбрасывающему входу (25.1-2) счетчика (25.1), тактовый вход (25.1-1) которого является тактовым входом (253) блока контроля (25), проверочный выход (25.0-4) проверочного ОЗУ (25.0) является выходом (252) блока контроля (25), управляющий вход (25.0-1) проверочного ОЗУ (25.0) является управляющим входом (251) блока контроля (25) и входом «Ввод управления» устройства.
| УСТРОЙСТВО ДЛЯ ОБУЧЕНИЯ ОПЕРАТОРОВ | 2005 |
|
RU2281560C1 |
| УСТРОЙСТВО ДЛЯ ОБУЧЕНИЯ ОПЕРАТОРОВ | 1991 |
|
RU2011229C1 |
| ТРЕНАЖЕР ОПЕРАТОРА СИСТЕМ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ | 1991 |
|
RU2012065C1 |
| US 20110039237 A1, 17.02.2011 | |||
| US 20140335480 A1, 13.11.2014. | |||

