Изобретение относится к радиотехнике и вычислительной технике и предназначено для использования в комплексах автоматизированных систем управления сетями многоканальной радиосвязи.
Известен вероятностный автомат, содержащий генератор тактовых импульсов, элементы И и ИЛИ, регистр сдвига, блоки памяти и задания времени (см. авт. св. СССР 1045232, G 06 F 15/36, 1983, бюл.36).
Однако данный вероятностный автомат моделирует неуправляемые полумарковские цепи без учета внешних управляющих воздействий, что не позволяет применять его для анализа реально протекающих процессов в сетях многоканальной радиосвязи, поскольку эти процессы в большинстве своем управляемы.
Известен вероятностный автомат, содержащий блок элементов И, блок памяти, блок задания времени, элемент ЗАПРЕТ, элемент ИЛИ, датчик случайной последовательности, блок формирования корректирующей последовательности, блок коррекции, блок формирования значений матрицы, блок формирования значений индикаторов, блок управления, дешифратор и генератор тактовых импульсов (см. патент РФ 2099781, G 06 F 17/00, 1997, бюл.35).
Однако данный вероятностный автомат моделирует управляемые полумарковские процессы с раз и навсегда заданными пороговыми значениями (границами) состояний - не способен динамически корректировать границы состояний моделируемого процесса, что не позволяет применять его для динамического анализа реальных сетей многоканальной радиосвязи, поскольку большое количество процессов, протекающих в управляемых сетях многоканальной радиосвязи, может в динамике функционирования изменять пороговые значения своих состояний под влиянием управляющих воздействий или внешних факторов.
Наиболее близким по технической сущности к заявляемому устройству (прототипом) является вероятностный автомат (см. патент РФ 2139569, G 06 F 17/18, 1999, бюл.28), содержащий датчик случайной последовательности, блок формирования нецелочисленных значений индикаторов, блок коррекции, блок формирования значений матрицы, блок управления, блок пороговых устройств, блок формирования значений индикаторов, блок элементов И, блок памяти, блок задания времени, дешифратор, элемент ЗАПРЕТ, элемент ИЛИ и генератор тактовых импульсов, выход которого соединен с прямым входом элемента ЗАПРЕТ и тактовым входом блока задания времени, группа выходов которого является группой выходов "индикаторы состояния" (в описании прототипа эта группа выходов обозначена словами "группа выходов") автомата и подключена к группе входов элемента ИЛИ, выход которого соединен с инверсным входом элемента ЗАПРЕТ, выход которого подключен к тактовым входам блока элементов И, блока формирования значений индикаторов и блока управления, второй вход которого является входом автомата, а управляющий выход подключен к входам дешифратора и блока формирования значений матрицы, группа выходов блока формирования значений индикаторов соединена с группой входов блока элементов И, выходы которого подключены к входам блока памяти, группа выходов которого соединена с группой входов блока задания времени, управляющий вход которого подключен к выходу дешифратора, группа управляющих входов блока формирования нецелочисленных значений индикаторов соединена с выходами блока формирования значений матрицы, группа его интерполяционных входов подключена к выходам блока памяти, а группа его выходов соединена с группой вспомогательных входов блока формирования значений индикаторов и с группой информационных входов блока коррекции, стартовый вход которого подключен к выходу датчика случайной последовательности, выход блока коррекции соединен с входом блока пороговых устройств, выходы которого подключены к информационным входам блока формирования значений индикаторов, пороговые выходы блока управления параллельно подключены к пороговым входам блока коррекции и блока пороговых устройств.
Достоинством прототипа является его способность моделировать управляемые полумарковские цепи с динамической коррекцией пороговых значений (границ) состояний случайных процессов, протекающих в управляемой сети многоканальной радиосвязи. Однако прототип имеет недостаток - невозможность идентификации и верификации при моделировании граничных и аварийных (катастрофичных) состояний управляемой сети многоканальной радиосвязи, состояний, характерных для аварийного, критического положения параметров надежности и устойчивости моделируемой сети. Ошибка моделирования в вопросе о сохранении надежности и устойчивости при плавных и незначительных вариациях параметров управляемой сети многоканальной радиосвязи очень опасна. Вопросами идентификации и верификации возможных катастрофических состояний моделируемого объекта занимается раздел математической теории, называемый теорией катастроф [1-3]. Данная теория посвящена скачкообразным изменениям состояний моделируемого процесса, возникающим в виде внезапного ответа системы (модели) на плавное изменение внешних условий и управляющих воздействий. Катастрофы на управляемой сети многоканальной радиосвязи могут выступать в виде неожиданных перегрузок коммутационных устройств, резких перепадов пропускной способности каналов, скачкообразного изменения параметров среды распространения сигнала и т.п. Например, с целью осуществления динамического многокритериального управления процессом функционирования сети многоканальной радиосвязи оператор (пользователь) формирует управляющие воздействия, рассчитанные на определенную пропускную способность сети. Однако во время функционирования сети многоканальной радиосвязи происходит плавный дрейф параметров среды распространения сигнала (например, изменение конфигурации отражающего тропосферного слоя - для тропосферной связи), который в непредвиденный момент времени способен привести к скачкообразному изменению состояния показателей пропускной способности сети, а как следствие, - к потере надежности и устойчивости функционирования сети многоканальной радиосвязи в целом. Адекватная модель состояний сети многоканальной радиосвязи должна быть способна проводить идентификацию и верификацию граничных и аварийных (катастрофичных) состояний, должна быть способна предсказать возможное катастрофическое состояние сети, давая тем самым пользователю (оператору) возможность избежать состояний, характерных для аварийного, критического положения параметров надежности и устойчивости сети. Неучет плавного изменения внешних параметров сети многоканальной радиосвязи и управляющих воздействий на сеть облегчает задачу моделирования, однако резко снижает степень адекватности модели, уровень достоверности результатов моделирования.
Целью предлагаемого изобретения является создание управляемого вероятностного автомата, способного моделировать управляемые полумарковские цепи и производить идентификацию и верификацию граничных и аварийных (катастрофичных) состояний моделируемых случайных процессов при плавных изменениях параметров внешних условий и управляющих воздействий.
Указанная цель достигается тем, что в известный вероятностный автомат, содержащий датчик случайной последовательности, блок формирования нецелочисленных значений индикаторов, блок коррекции, блок формирования значений матрицы, блок управления, блок пороговых устройств, блок формирования значений индикаторов, генератор тактовых импульсов, элемент ЗАПРЕТ, блок элементов И, блок памяти, дешифратор, блок задания времени и элемент ИЛИ, выход которого соединен с инверсным входом элемента ЗАПРЕТ, прямой вход которого подключен к выходу генератора тактовых импульсов и тактовому входу блока задания времени, m выходов которого, где m≥3, подключены к соответствующим m входам элемента ИЛИ и являются m выходами "индикаторы состояния" вероятностного автомата, второй вход блока управления является входом вероятностного автомата, m выходов блока формирования значений индикаторов соединены с соответствующими m входами блока элементов И, m выходов которого подключены к соответствующим m входам блока памяти, m выходов которого соединены с соответствующими m входами блока задания времени и m интерполяционными входами блока формирования нецелочисленных значений индикаторов, m выходов которого подключены к соответствующим m вспомогательным входам блока формирования значений индикаторов и m информационным входам блока коррекции, стартовый вход которого подключен к выходу датчика случайной последовательности, m-1 пороговых выходов блока управления соединены с соответствующими m-1 пороговыми входами блока коррекции и блока пороговых устройств, вход которого подключен к выходу блока коррекции, m выходов блока пороговых устройств соединены с соответствующими m информационными входами блока формирования значений индикаторов, управляющий вход блока задания времени подключен к выходу дешифратора, вход которого соединен с входом блока формирования значений матрицы и управляющим выходом блока управления, тактовый вход которого подключен к тактовому входу блока элементов И, выходу элемента ЗАПРЕТ и тактовому входу блока формирования значений индикаторов, дополнительно введен блок анализа катастроф, тактовый и проверочный входы которого соединены соответственно с тактовым входом и проверочным выходом блока управления, М выходов, где М= m2, блока формирования значений матрицы соединены с соответствующими М управляющими входами блока анализа катастроф, М управляющих входов блока формирования нецелочисленных значений индикаторов подключены к соответствующим М управляющим выходам блока анализа катастроф, предупредительный выход которого является выходом "угроза катастрофы" вероятностного автомата.
Блок анализа катастроф состоит из центрального оперативного запоминающего устройства (ОЗУ), m исполнительных ОЗУ, постоянного запоминающего устройства (ПЗУ), элемента итерационного сравнения, элемента сравнения, промежуточного ОЗУ, промежуточного элемента И и элемента И, причем М управляющих входов центрального ОЗУ являются соответствующими М управляющими входами блока анализа катастроф, М управляющих выходов центрального ОЗУ являются соответствующими М управляющими выходами блока анализа катастроф. Тактовый вход центрального ОЗУ подключен к входу ПЗУ и является тактовым входом блока анализа катастроф, i-ый исполнительный выход центрального ОЗУ, где i=1,2,... , m, подключен к входу i-го исполнительного ОЗУ. Входы m исполнительных ОЗУ объединены и подключены к второму входу элемента итерационного сравнения и первому входу элемента сравнения, выходы m исполнительных ОЗУ объединены и подключены к первому входу элемента итерационного сравнения. Выход ПЗУ соединен со вторым входом элемента сравнения, выход элемента итерационного сравнения подключен к входу промежуточного ОЗУ и второму входу промежуточного элемента И, первый вход которого соединен с выходом промежуточного ОЗУ. Выход промежуточного элемента И подключен к выходу элемента сравнения и первому входу элемента И, второй вход которого является проверочным входом блока анализа катастроф. Выход элемента И соединен со считывающим входом центрального ОЗУ и является предупредительным выходом блока анализа катастроф.
Блок управления состоит из управляющего ОЗУ, порогового ОЗУ, счетчика и проверочного ОЗУ. Тактовый выход счетчика подключен к тактовым входам управляющего, порогового и проверочного ОЗУ. Сбрасывающие выходы управляющего, порогового и проверочного ОЗУ объединены и подключены к сбрасывающему входу счетчика, тактовый вход которого является тактовым входом блока управления. Информационные входы управляющего, порогового и проверочного ОЗУ соединены между собой и являются вторым входом блока управления. Выход управляющего ОЗУ является управляющим выходом блока управления, m-1 выходов порогового ОЗУ являются соответствующими m-1 пороговыми выходами блока управления. Выход проверочного ОЗУ является проверочным выходом блока управления.
Принцип создания предлагаемого управляемого вероятностного автомата основан на известных результатах теории переменных состояний и теории марковских процессов, изложенных в работах [4-7], а также на результатах исследований в области теории катастроф, изложенных в работах [1-3]. Анализ работ [4-7] позволяет применить для аналитического вероятностно-временного описания системы показателей качества функционирования сетей многоканальной радиосвязи аппарат управляемых цепей Маркова в форме разностных стохастических уравнений. Анализ работ [1-3] позволяет сформировать математически корректный алгоритм идентификации и верификации граничных и аварийных (катастрофичных) состояний моделируемых случайных процессов при плавных изменениях параметров внешних условий и управляющих воздействий. Таким образом, в рамках моделирования управляемых полумарковских цепей решается задача априорного оценивания и сравнения значений элементов матрицы переходных вероятностей разностного стохастического уравнения. С точки зрения физической интерпретации, это процесс априорного статистического анализа плавных и незначительных изменений внешних условий и управляющих воздействий на сеть многоканальной радиосвязи с возможностью оповещения (предупреждения) пользователя (оператора) о потенциальных катастрофических последствиях в поведении модели, которые на первый взгляд не видны и практически никогда не учитываются при моделировании. При данном подходе к моделированию возможно представление динамики изменения состояния сети многоканальной радиосвязи в виде набора систем разностных стохастических уравнений [4-7] вида:


где выражение (1) - уравнение состояния для вектора отсчетов процесса Х на каждом (k+1) шаге функционирования сети, где СT - транспонированная матрица-строка возможных значений процесса, а  - вектор индикаторов состояния моделируемого процесса, элементы этого вектора принимают значения:
- вектор индикаторов состояния моделируемого процесса, элементы этого вектора принимают значения:
Выражение (2) - уравнение состояния для вектора индикаторов состояния на (k+1) шаге, где ϕT(k+1,k,u) - транспонированная матрица вероятностей перехода процесса из одного состояния в другое, a ΔΘ(k+1) - вектор значений приращения индикаторов состояния, компенсирующий нецелочисленную часть уравнения (2). Выражение (3) - уравнение наблюдения за процессом, где H(X(k+1)) - матрица-строка наблюдаемых значений процесса, а  - вектор белых шумов наблюдения с нулевым средним и матрицей дисперсии
- вектор белых шумов наблюдения с нулевым средним и матрицей дисперсии  .
.
Анализ результатов работ [1-3] позволяет предусмотреть в устройстве возможность идентификации и верификации граничных и аварийных (катастрофичных) состояний моделируемых случайных процессов при плавных изменениях параметров внешних условий и управляющих воздействий. Известно [5, 7] , что математическая формализация физических параметров внешних условий и управляющих воздействий, влияющих на поведение сети, осуществляется посредством присвоения соответствующих значений элементам транспонированной матрицы переходных вероятностей разностного стохастического уравнения (2). Данная квадратная матрица состоит из М элементов, где М=m2, и имеет вид:
Количество m определяется пользователем, осуществляющим моделирование, исходя из возможных состояний моделируемого процесса. Например, при m=3 традиционно используются типовые состояния моделируемого процесса: состояние 1 - "норма"; состояние 2 - "удовлетворительно"; состояние 3 - "авария" и матрица переходных вероятностей имеет вид:
Каждый из элементов матрицы (5) и (6) имеет четкий физический смысл и представляет собой вероятность перехода моделируемого процесса из состояния в состояние, например, для матрицы (6), а11 - вероятность такого события, при котором процесс (или какой-либо показатель качества) находился в состоянии "норма" и останется в состоянии "норма" на следующем шаге (k+1) функционирования, a12 - вероятность такого события, при котором процесс находился в состоянии "норма" и перейдет в состояние "удовлетворительно" на следующем шаге (k+1), а13 - вероятность такого события, при котором процесс находился в состоянии "норма" и перейдет в состояние "авария" на следующем шаге (k+1) функционирования и т.д.
Очевидно, что для решения задачи априорного оценивания и сравнения значений элементов матрицы переходных вероятностей в целях идентификации и верификации граничных и аварийных (катастрофичных) состояний моделируемых случайных процессов при плавных изменениях параметров внешних условий и управляющих воздействий необходимо проводить текущий пошаговый мониторинг не всех элементов матрицы (5), а лишь тех, физический смысл которых заключается в вероятности перехода из любого состояния в аварийное (катастрофичное) состояние. Для унифицированной матрицы (5) количество таких элементов равно m и данные элементы представляют собой множество:
Nm={a1m(k+1), a2m(k+1),..., aim(k+1),..., amm(k+1)}, (7)
где каждый элемент, кроме amm(k+1), имеет физический смысл вероятности перехода моделируемого процесса из любого состояния (1-го, 2-го,..., i-го,.. .. (m-1)-го состояния) в аварийное (катастрофичное) состояние m на следующем шаге (k+1) функционирования моделируемого объекта. Элемент amm(k+1) имеет физический смысл вероятности такого события, когда моделируемый процесс (или показатель качества) находился на k-ом шаге в аварийном (катастрофичном) состоянии и останется в данном состоянии на следующем (k+1)-ом шаге функционирования моделируемого объекта.
Идентификация граничных и аварийных (катастрофичных) состояний моделируемых случайных процессов производится путем пошагового априорного оценивания и сравнения значений каждого i-го из m элементов множества Nm (7) с целью определения наличия или отсутствия возможного превышения этими значениями допустимого порога, определяемого выражением:
где  - допустимое значение вероятности перехода моделируемого процесса в аварийное (катастрофичное) состояние из любого другого состояния.
- допустимое значение вероятности перехода моделируемого процесса в аварийное (катастрофичное) состояние из любого другого состояния.
Превышение на одном из (k+1) шагов моделирования любым i-ым из значений m элементов множества Nm (7) данного порога характеризует начало плавного изменения параметров внешних условий и управляющих воздействий.
Верификация граничных и аварийных (катастрофичных) состояний моделируемых случайных процессов представляет собой независимый от идентификации процесс, характеризует превышение значения любого i-го из m элементов множества (7) на данном k-ом шаге моделирования над значением этого же элемента на следующем (k+1)-ом шаге и производится путем априорного оценивания значений каждого i-го из m элементов множества Nm на k-ом шаге моделирования и сравнения полученного значения с оценочным значением этого же элемента на следующем (k+1)-ом шаге в соответствии с выражением:
Физический смысл процесса верификации заключается в выявлении тенденции повышения вероятности изменения параметров внешних условий и управляющих воздействий в сторону граничного и аварийного (катастрофичного) состояния моделируемого случайного процесса.
В обоих случаях априорного оценивания и сравнения значений элементов матрицы переходных вероятностей разностного стохастического уравнения (2), как при осуществлении процесса идентификации граничных и аварийных (катастрофичных) состояний моделируемых случайных процессов, когда идентифицировано событие ,
,
так и при осуществлении процесса верификации, когда подтверждена тенденция повышения вероятности изменения параметров внешних условий и управляющих воздействий в сторону граничного и аварийного (катастрофичного) состояния моделируемого случайного процесса
aim(k)<aim(k+1) (11),
пользователь (оператор), осуществляющий моделирование, должен быть оповещен (предупрежден) о возможном аварийном состоянии моделируемого процесса.
Если пользователь (оператор) не способен повлиять на нежелательное изменение параметров внешних условий и управляющих воздействий или нуждается в получении именно граничных и аварийных (катастрофичных) состояний модели процесса, процесс моделирования будет осуществляться без коррекции элементов матрицы переходных вероятностей или пороговых значений состояний.
Если пользователь (оператор) способен повлиять на нежелательное изменение параметров внешних условий и управляющих воздействий и процесс моделирования осуществляется в рамках динамического оптимального управления сетью многоканальной радиосвязи, когда аварийные состояния сети недопустимы, на основе полученных данных идентификации и верификации происходит внешняя коррекция элементов матрицы переходных вероятностей или пороговых значений состояний с целью не допустить аварийного (катастрофичного) скачкообразного изменения состояний моделируемого процесса при малых возмущениях [2].
Примеры, иллюстрирующие аналогичные с точки зрения теории катастроф операции предотвращения потери устойчивости и надежности сложных управляемых систем при плавных изменениях внешних условий, приведены в [1] и [2], здесь представлены алгоритмы анализа структурной устойчивости объектов и оценки критических точек (точек Морса) в процессе функционирования системы, характеризующих локальные максимумы и минимумы устойчивого (не катастрофичного) поведения объекта моделирования при плавных изменениях внешних условий.
Анализ выражений (1)-(11) позволяет сделать вывод о технической возможности реализации процесса моделирования управляемых полумарковских цепей и процессов идентификации и верификации граничных и аварийных (катастрофичных) состояний моделируемых случайных процессов при плавных изменениях параметров внешних условий и управляющих воздействий.
Построение управляемого вероятностного автомата на основе предложенного принципа работы позволяет получить преимущество перед прототипом, обеспечивая способность моделировать управляемые полумарковские цепи, идентифицируя и верифицируя граничные и аварийные (катастрофичные) состояния моделируемых случайных процессов при плавных изменениях параметров внешних условий и управляющих воздействий. Это существенно расширяет функциональные возможности устройства, позволяя моделировать процессы, происходящие в реальной сети многоканальной радиосвязи, и предсказать возможное катастрофическое состояние сети, давая тем самым пользователю (оператору), осуществляющему моделирование и управление сетью, возможность избежать состояний, характерных для аварийного, критического положения параметров надежности и устойчивости сети.
Заявленное устройство поясняется чертежами, на которых представлены:
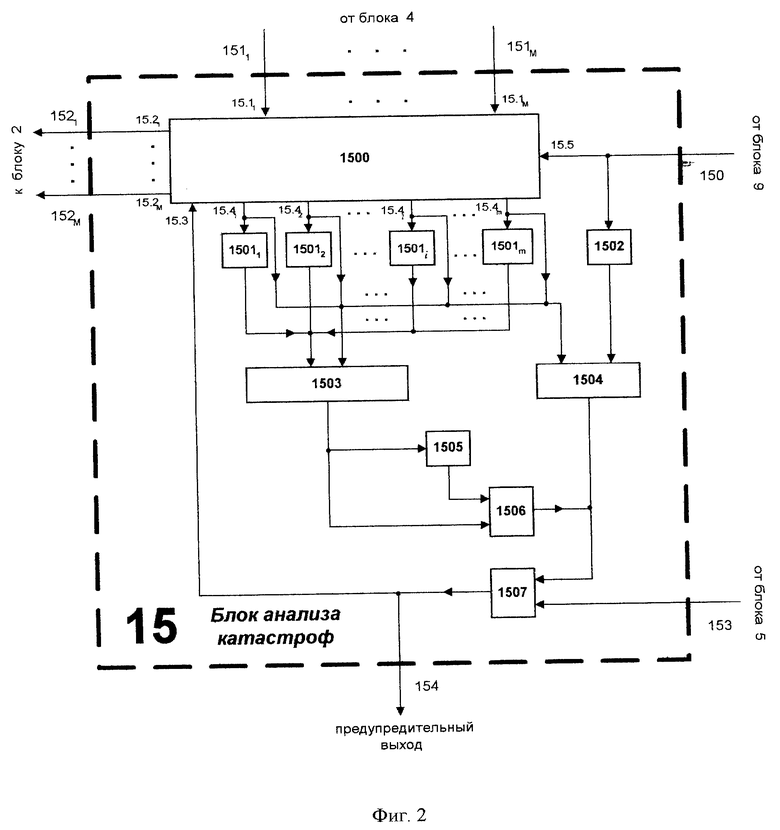
на фиг.1 - структурная схема управляемого вероятностного автомата;
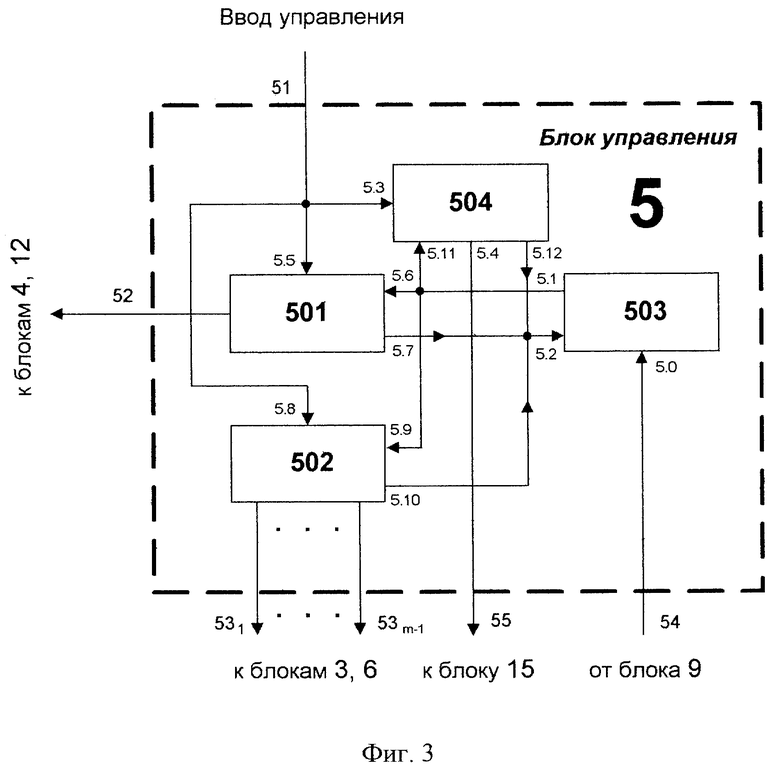
на фиг.2 - структурная схема блока анализа катастроф;
на фиг.3 - структурная схема блока управления.
Вероятностный автомат, изображенный на фиг.1, состоит из датчика случайной последовательности 1, блока формирования нецелочисленных значений индикаторов 2, блока коррекции 3, блока формирования значений матрицы 4, блока управления 5, блока пороговых устройств 6, блока формирования значений индикаторов 7, генератора тактовых импульсов 8, элемента ЗАПРЕТ 9, блока элементов И 10, блока памяти 11, дешифратора 12, блока задания времени 13, элемента ИЛИ 14 и блока анализа катастроф 15. Выход элемента ИЛИ 14 соединен с инверсным входом элемента ЗАПРЕТ 9, прямой вход которого подключен к выходу генератора тактовых импульсов 8 и тактовому входу блока задания времени 13, m выходов которого, где m≥3, подключены к соответствующим m входам элемента ИЛИ 14 и являются m выходами "индикаторы состояния" вероятностного автомата. Второй вход 51 блока управления 5 является входом вероятностного автомата, m выходов блока формирования значений индикаторов 7 соединены с соответствующими m входами блока элементов И 10, m выходов которого подключены к соответствующим m входам блока памяти 11, m выходов которого соединены с соответствующими m входами блока задания времени 13 и m интерполяционными входами 221-22m блока формирования нецелочисленных значений индикаторов 2, m выходов 231-23m которого подключены к соответствующим m вспомогательным входам 721-72m блока формирования значений индикаторов 7 и m информационным входам 311-31m блока коррекции 3, стартовый вход 33 которого подключен к выходу датчика случайной последовательности 1, m-1 пороговых выходов 531-53m-1 блока управления 5 соединены с соответствующими m-1 пороговыми входами 321-32m-1 блока коррекции 3 и с соответствующими m-1 пороговыми входами 621-62m-1 блока пороговых устройств 6. Вход блока пороговых устройств 6 подключен к выходу 34 блока коррекции 3, m выходов блока пороговых устройств 6 соединены с соответствующими m информационными входами блока формирования значений индикаторов 7. Управляющий вход блока задания времени 13 подключен к выходу дешифратора 12, вход которого соединен с входом блока формирования значений матрицы 4 и управляющим выходом 52 блока управления 5, тактовый вход 54 которого подключен к тактовому входу блока элементов И 10, выходу элемента ЗАПРЕТ 9 и тактовому входу 73 блока формирования значений индикаторов 7. Тактовый 150 и проверочный 153 входы блока анализа катастроф 15 соединены соответственно с тактовым входом 54 и проверочным выходом 55 блока управления 5. М выходов, где М=m2, блока формирования значений матрицы 4 соединены с соответствующими М управляющими входами 1511-151m блока анализа катастроф 15, М управляющих входов 211-21M блока формирования нецелочисленных значений индикаторов 2 подключены к соответствующим М управляющим выходам 1521-152M блока анализа катастроф 15. Предупредительный выход 154 блока анализа катастроф 15 является выходом "угроза катастрофы" вероятностного автомата.
Под количеством m (входов, выходов, сумматоров, умножителей, счетчиков, элементов сравнения и т.п.) понимается их установленное для конкретного вероятностного автомата количество. Максимальное количество m, где m≥3, определяется пользователем, осуществляющим моделирование, исходя из возможных m состояний моделируемого процесса и принципиально не ограничено. Однако максимальное значение m целесообразно выбирать не более 20, т.е. 3≤m≤20 и m={ 3,4,5,6,7,8,9,10, . . . ,18,19,20}. При m>20 существенно увеличивается время считывания значений М элементов матрицы переходных вероятностей (т.к. М=m2) из блока управления в блок формирования значений матрицы, а значит резко возрастает общее время моделирования.
Блок анализа катастроф 15 (фиг.2) предназначен для осуществления процедур идентификации и верификации граничных и аварийных (катастрофичных) состояний моделируемых случайных процессов при плавных изменениях параметров внешних условий и управляющих воздействий, а также для выработки сигналов логического нуля или логической единицы (сигнала предсказания и предупреждения), характеризующих соответственно отсутствие или наличие возможного катастрофического состояния моделируемого процесса. Блок анализа катастроф 15 состоит из центрального ОЗУ 1500, m исполнительных ОЗУ 15011-1501m, ПЗУ 1502, элемента итерационного сравнения 1503, элемента сравнения 1504, промежуточного ОЗУ 1505, промежуточного элемента И 1506 и элемента И 1507, причем М управляющих входов 15.11-15.1M центрального ОЗУ 1500 являются соответствующими М управляющими входами 1511-151M блока анализа катастроф 15, М управляющих выходов 15.21-15.2M центрального ОЗУ 1500 являются соответствующими М управляющими выходами 1521-152M блока анализа катастроф 15. Тактовый вход 15.5 центрального ОЗУ 1500 подключен к входу ПЗУ 1502 и является тактовым входом 150 блока анализа катастроф 15, i-ый исполнительный выход 15.4i центрального ОЗУ 1500, где i=1,2,...,m, подключен к входу i-го исполнительного ОЗУ 1501i. Входы m исполнительных ОЗУ 15011-1501m объединены и подключены к второму входу элемента итерационного сравнения 1503 и первому входу элемента сравнения 1504. Выходы m исполнительных ОЗУ 15011-1501m объединены и подключены к первому входу элемента итерационного сравнения 1503. Выход ПЗУ 1502 соединен со вторым входом элемента сравнения 1504, выход элемента итерационного сравнения 1503 подключен к входу промежуточного ОЗУ 1505 и второму входу промежуточного элемента И 1506, первый вход которого соединен с выходом промежуточного ОЗУ 1505. Выход промежуточного элемента И 1506 подключен к выходу элемента сравнения 1504 и первому входу элемента И 1507, второй вход которого является проверочным входом 153 блока анализа катастроф 15. Выход элемента И 1507 соединен со считывающим входом 15.3 центрального ОЗУ 1500 и является предупредительным выходом 154 блока анализа катастроф 15. Центральное ОЗУ 1500 может быть технически реализовано на основе высокоскоростного ОЗУ серии 155 (например, К155РУ2), как показано в литературе [8, с.164-166, рис.1.121]. Исполнительные ОЗУ 15011-1501m и промежуточное ОЗУ 1505 могут быть реализованы на базе типового полупроводникового динамического ОЗУ, описанного в литературе [9, с.194-196, рис.6.9 (а)]. Техническая реализация ПЗУ 1502 возможна по аналогии с репрограммируемым ПЗУ, описанным в [9, стр.199-205, рис.6.12]. Элемент итерационного сравнения 1503 и элемент сравнения 1504 представляют собой цифровые узлы сравнения, описанные в [9, стр.149-152, рис.5.19]. Промежуточный элемент И 1506 и элемент И 1507 могут быть технически реализованы на основе типового логического элемента И, описанного в [9, стр.13-14, рис.1.2].
Блок управления 5 (фиг.3) предназначен для формирования управляющей кодовой последовательности, последовательности пороговых значений состояний, а также для формирования сигнала логического нуля или логической единицы, характеризующих соответственно запрещение или разрешение пользователя (оператора) на выдачу сигнала оповещения о наличии возможного катастрофического состояния моделируемого процесса. Блок управления 5 состоит из управляющего ОЗУ 501, порогового ОЗУ 502, счетчика 503 и проверочного ОЗУ 504. Тактовый выход 5.1 счетчика 503 подключен к тактовым входам 5.6, 5.9 и 5.11 соответственно управляющего 501, порогового 502 и проверочного 504 ОЗУ. Сбрасывающие выходы 5.7, 5.10 и 5.12 соответственно управляющего 501, порогового 502 и проверочного 504 ОЗУ объединены и подключены к сбрасывающему входу 5.2 счетчика 503, тактовый вход 5.0 которого является тактовым входом 54 блока управления 5. Информационные входы 5.5, 5.8 и 5.3 соответственно управляющего 501, порогового 502 и проверочного 504 ОЗУ соединены между собой и являются вторым входом 51 блока управления 5. Выход управляющего ОЗУ 501 является управляющим выходом 52 блока управления 5, m-1 выходов порогового ОЗУ 502 являются соответствующими m-1 пороговыми выходами 531-53m-1 блока управления 5. Выход 5.4 проверочного ОЗУ 504 является проверочным выходом 55 блока управления 5. Частный случай технической реализации управляющего ОЗУ 501 и проверочного ОЗУ 504 на базе типового полупроводникового динамического ОЗУ описан в литературе [9, с.194-196, рис.6.9 (а)]. Счетчик 503 может быть технически реализован в виде типового рекуррентного счетчика, как описано в литературе [10, с.96-100]. Техническая реализация порогового ОЗУ 502 возможна по аналогии с динамическим ОЗУ, описанным в [9, стр.194-196, рис.6.9 (б, в)].
Блок формирования значений матрицы 4, входящий в общую структурную схему, предназначен для записи, хранения поступающих значений М элементов матрицы переходных вероятностей и считывания управляющей информации ϕT(k+1,k,u) реализуется в виде запоминающего устройства аналогично описанному в литературе [11, стр.291-292, рис.6.7].
Блок формирования нецелочисленных значений индикаторов 2, входящий в общую структурную схему, предназначен для формирования элементов вектора нецелочисленных значений индикаторов состояния. Его структурная схема и принцип действия известны и описаны, например, в прототипе (см. патент РФ 2139569, фиг.2)
Датчик случайной последовательности 1, входящий в общую структурную схему, предназначен для генерации значений случайной вспомогательной последовательности с нормальной плотностью распределения и может быть реализован в виде, например, датчика, описанного в [12, стр.42, рис.25].
Блок коррекции 3, входящий в общую структурную схему, предназначен для динамической коррекции математического ожидания (МО) и дисперсии случайной последовательности в соответствии с условиями, определяемыми принятой математической моделью. Его структурная схема и принцип действия известны и описаны, например, в прототипе (см. патент РФ 2139569, фиг.3-7).
Блок пороговых устройств 6, входящий в общую структурную схему, предназначен для получения предварительных значений элементов вектора индикаторов состояния процесса. Его структурная схема и принцип действия известны и описаны, например, в прототипе (см. патент РФ 2139569, фиг.9).
Блок формирования значений индикаторов 7, входящий в общую структурную схему, предназначен для получения окончательных значений элементов вектора индикаторов состояния процесса. Его структурная схема и принцип действия известны и описаны, например, в прототипе (см. патент РФ 2139569, фиг.10).
Генератор тактовых импульсов 8, входящий в общую структурную схему, предназначен для определения моментов выхода вероятностного автомата из предыдущего состояния и реализуется в виде известного генератора пилообразного напряжения, описанного, например, в работе [11, стр.149-151, рис.3.14 (а)],
Элемент ЗАПРЕТ 9 и элемент ИЛИ 14, входящие в общую структурную схему, предназначены для поддержки процедуры определения моментов выхода вероятностного автомата из предыдущего состояния и могут быть построены в соответствии с описанными, например, в [12, стр.20-24, рис.9, 11].
Блок элементов И 10, входящий в общую структурную схему, предназначен для осуществления записи полученных значений элементов вектора индикаторов состояния в блок памяти. Элементы И, входящие в блок элементов И 10, реализуются в виде известных и описанных, например, в [9, с. 13-14, рис.1.2].
Блок памяти 11, входящий в общую структурную схему, предназначен для хранения значений элементов вектора индикаторов состояния до момента истечения периода смены состояний и реализуется в виде регистра хранения в соответствии с описанием, представленным, например, в работе [9, стр.156-158, рис. 5.27].
Дешифратор 12, входящий в общую структурную схему, предназначен для преобразования управляющей кодовой последовательности в код, соответствующий временному интервалу периода смены состояний, и построен в виде известного и описанного, например, в книге [13, стр.432-436, рис.4.46].
Блок задания времени 13, входящий в общую структурную схему, предназначен для формирования нулевой комбинации, определяющей момент истечения периода смены состояний, и реализуется в виде цифрового таймера аналогично описанному в работе [14, стр.264-267, рис.7.48].
Вероятностный автомат работает следующим образом. С выхода датчика случайной последовательности 1 значения случайной вспомогательной последовательности х' с нормальной плотностью распределения в двоичном коде поступают на стартовый вход 33 блока коррекции 3. Блок формирования нецелочисленных значений индикаторов 2 предназначен для формирования элементов вектора нецелочисленных значений индикаторов состояния. В блоке 2 на основе полученных в двоичном коде с m интерполяционных входов 221-22m элементов вектора целочисленных значений индикаторов состояния моделируемого процесса на предыдущем шаге и полученных в двоичном коде с управляющих входов 211-21M М значений элементов матрицы вероятностей перехода процесса из одного состояния в другое (5) осуществляется вычисление элементов вектора нецелочисленных значений индикаторов состояния в соответствии с выражением: ,
,
являющимся модификацией известного уравнения Колмогорова-Чепмена и полученным в результате преобразования выражения (2) [7, 15], где  - вектор нецелочисленных значений индикаторов состояния моделируемого процесса, имеющий размерность m и математический смысл пошаговых, а в конечном итоге и финальных вероятностей нахождения случайного процесса в том или ином состоянии; ϕT(k+1,k,u) - транспонированная матрица значений вероятностей перехода процесса из одного состояния в другое, содержащая М, где М=m2, элементов;
- вектор нецелочисленных значений индикаторов состояния моделируемого процесса, имеющий размерность m и математический смысл пошаговых, а в конечном итоге и финальных вероятностей нахождения случайного процесса в том или ином состоянии; ϕT(k+1,k,u) - транспонированная матрица значений вероятностей перехода процесса из одного состояния в другое, содержащая М, где М=m2, элементов;  - вектор целочисленных значений индикаторов состояния моделируемого процесса на предыдущем шаге, имеющий размерность m. С m информационных выходов 231-23m блока 2 элементы вектора нецелочисленных значений индикаторов
- вектор целочисленных значений индикаторов состояния моделируемого процесса на предыдущем шаге, имеющий размерность m. С m информационных выходов 231-23m блока 2 элементы вектора нецелочисленных значений индикаторов  в двоичном коде подаются на m информационных входов 311-31m блока коррекции 3 и на m вспомогательных входов 721-72m блока формирования значений индикаторов 7.
в двоичном коде подаются на m информационных входов 311-31m блока коррекции 3 и на m вспомогательных входов 721-72m блока формирования значений индикаторов 7.
Блок коррекции 3 предназначен для динамической коррекции МО и дисперсии случайной последовательности в соответствии с условиями, определяемыми принятой математической моделью. В блоке 3 по нецелочисленным значениям индикаторов состояния (вероятностям состояний), поступающим в двоичном коде на m информационных входов 311-31m и c учетом пороговой информации, поступающей в двоичном коде на m-1 пороговых входов 321-32m-1, производится динамическая коррекция МО и дисперсии случайной последовательности х' в соответствии с условиями, определяемыми принятой моделью, описываемой выражениями (1-3). Алгоритм вычисления в блоке 3 отклонений МО и дисперсии для последующей коррекции исходной случайной последовательности х' построен в соответствии с правилом рациональной аппроксимации, изложенным в работе [16, стр.729] и подробно рассмотрен в описании прототипа (см. патент РФ 2139569). В результате, на выходе 34 блока коррекции 3 в двоичном коде в моменты выхода автомата из предыдущего состояния (смена такта) имеем выборочное значение случайной величины х*, полученное из модифицированной случайной последовательности х' с МО и дисперсией, соответствующими заданным условиям моделирования.
Выборочное значение случайной величины х* с МО и дисперсией, соответствующими заданным условиям моделирования, поступает в двоичном коде на информационный вход блока пороговых устройств 6, предназначенного для получения предварительных значений элементов вектора индикаторов состояния моделируемого процесса. На m-1 пороговых входов 621-62m-1 блока 6 с m-1 пороговых выходов 531-53m-1 блока 5 поступает в двоичном коде m-1 пороговых значений состояний процесса Хпор1-Xпорm-1. В результате, m предварительных значений индикаторов состояний Θ предварительных значений индикаторов состояний моделируемого процесса, которые используются в дальнейшем для формирования значений индикаторов в соответствии с выражениями [7, 15]:
предварительных значений индикаторов состояний моделируемого процесса, которые используются в дальнейшем для формирования значений индикаторов в соответствии с выражениями [7, 15]:


где выражение (13) описывает механизм получения элементов m-мерной матрицы компенсационных добавок  и содержит элементы: А - m-мерная единичная диагональная матрица;
и содержит элементы: А - m-мерная единичная диагональная матрица;  - m-мерная матрица, столбцами которой являются вектора нецелочисленных значений индикаторов
- m-мерная матрица, столбцами которой являются вектора нецелочисленных значений индикаторов  , повторенные m раз. Выражение (14) описывает порядок выбора вектора компенсационных добавок
, повторенные m раз. Выражение (14) описывает порядок выбора вектора компенсационных добавок  из матрицы компенсационных добавок
из матрицы компенсационных добавок  с помощью вектора
с помощью вектора  предварительных значений индикаторов состояний моделируемого процесса. Выражение (15) завершает алгоритм вычислений вектора индикаторов состояний
предварительных значений индикаторов состояний моделируемого процесса. Выражение (15) завершает алгоритм вычислений вектора индикаторов состояний  и является модифицированной записью уравнения состояния моделируемого процесса (2).
и является модифицированной записью уравнения состояния моделируемого процесса (2).
Комплекс выражений (13)-(15) реализует блок формирования значений индикаторов 7, предназначенный для получения окончательных значений m элементов вектора индикаторов состояния процесса с учетом поступающих в двоичном коде на m вспомогательных входов 721-72m параметров элементов вектора нецелочисленных значений индикаторов  из блока 2 и в соответствии с алгоритмом вычислений, описанным в прототипе (см. патент РФ 2139569). Полученные m элементов вектора индикаторов состояний
из блока 2 и в соответствии с алгоритмом вычислений, описанным в прототипе (см. патент РФ 2139569). Полученные m элементов вектора индикаторов состояний  через m выходов блока формирования значений индикаторов 7 подаются в двоичном коде на m входов блока элементов И 10.
через m выходов блока формирования значений индикаторов 7 подаются в двоичном коде на m входов блока элементов И 10.
Блок управления 5 предназначен для формирования управляющей кодовой последовательности, последовательности пороговых значений состояний, а также для формирования сигнала логического нуля или логической единицы, характеризующих соответственно запрещение или разрешение пользователя (оператора) на выдачу сигнала оповещения о наличии возможного катастрофического состояния моделируемого процесса. Блок управления 5 представляет собой куб оперативной памяти, в котором записана программа работы устройства, и может быть реализован по схеме, представленной на фиг.3. Формирование управляющей кодовой последовательности, последовательности пороговых значений и сигнала логического нуля или логической единицы производится следующим образом. С внешнего источника через второй вход 51 блока управления 5 на информационный вход 5.5 управляющего ОЗУ 501 производится последовательная запись в двоичном коде М значений элементов матрицы переходных вероятностей (ПВ), соответствующих вводимому управлению, в ячейки памяти управляющего ОЗУ 501. Через этот же второй вход 51 блока управления 5 на информационный вход 5.8 порогового ОЗУ 502 производится последовательная запись в двоичном коде m-1 пороговых значений Хпор1-Хпорm-1 состояний моделируемого процесса в ячейки памяти порогового ОЗУ 502. Через этот же второй вход 51 блока управления 5 на информационный вход 5.3 проверочного ОЗУ 504 производится запись логического нуля или логической единицы, характеризующих соответственно запрещение или разрешение пользователя (оператора) на выдачу сигнала оповещения о наличии возможного катастрофического состояния моделируемого процесса. Логический нуль или логическая единица записывается в ячейки памяти проверочного ОЗУ 504. Отсчеты моментов выхода автомата из предыдущего состояния поступают от элемента ЗАПРЕТ 9 через тактовый вход 54 блока управления 5 на тактовый вход 5.0 счетчика 503 и определяют, поступая с тактового выхода 5.1 счетчика 503 на тактовые входы 5.6 управляющего ОЗУ 501, 5.9 порогового ОЗУ 502 и 5.11 проверочного ОЗУ 504 соответственно, момент начала считывания М значений элементов хранящейся в ОЗУ 501 новой матрицы ПВ в двоичном коде через управляющий выход 52 блока управления 5 в блок формирования значений матрицы 4 и в дешифратор 12, момент начала считывания хранящегося в проверочном ОЗУ 504 логического нуля или логической единицы, а также момент начала считывания в двоичном коде новых m-1 пороговых значений (Хпор1-Хпорm-1) состояний моделируемого процесса, хранящихся в ячейках памяти порогового ОЗУ 502. Считывание логического нуля или логической единицы производится с выхода 5.4 проверочного ОЗУ 504 через проверочный выход 55 блока управления 5 на проверочный вход 153 блока анализа катастроф 15. Считывание пороговых значений производится через m-1 пороговых выходов 531-53m-1 блока управления 5 на m-1 пороговых входов 321-32m-1 блока коррекции 3 и на m-1 пороговых входов 621-62m-1 блока пороговых устройств 6. Со сбрасывающих выходов 5.7, 5.10 и 5.12 управляющего ОЗУ 501, порогового ОЗУ 502 и проверочного ОЗУ 504 соответственно на сбрасывающий вход 5.2 счетчика 503 в момент считывания матрицы ПВ, логического нуля (логической единицы) или пороговых значений поступает сигнал, сбрасывающий значения счетчика 503 и дающий команду счетчику 503 начать новый отсчет для вновь введенных управляющих воздействий (М элементов матрицы ПВ), логического нуля (логической единицы) и пороговых значений (Хпор1-Хпорm-1).
Блок анализа катастроф 15 предназначен для осуществления процедур идентификации и верификации граничных и аварийных (катастрофичных) состояний моделируемых случайных процессов при плавных изменениях параметров внешних условий и управляющих воздействий, а также для выработки сигналов логического нуля или логической единицы (сигнала предсказания и предупреждения), характеризующих соответственно отсутствие или наличие возможного катастрофического состояния моделируемого процесса. Блок анализа катастроф 15 может быть реализован по схеме, представленной на фиг.2. Идентификация и верификация граничных и аварийных (катастрофичных) состояний моделируемых случайных процессов при плавных изменениях параметров внешних условий и управляющих воздействий, а также выработка сигналов логического нуля или логической единицы (сигнала предсказания и предупреждения) осуществляется в блоке 15 следующим образом. С М выходов блока формирования значений матрицы 4 через М управляющих входов 1511-151M блока анализа катастроф 15 на М управляющих входов 15.11-15.1M центрального ОЗУ 1500 поступают в двоичном коде и записываются в ячейки памяти значения М элементов матрицы ПВ на (k+1)-ом шаге функционирования, описанной выражением (5). С выхода блока 9 через тактовый вход 150 блока 15 на тактовый вход 15.5 центрального ОЗУ 1500 и на вход ПЗУ 1502 поступает тактовый импульс, инициируя последовательное считывание из m ячеек памяти центрального ОЗУ 1500 значений m из М элементов матрицы ПВ на (k+1)-ом шаге функционирования, а именно тех, которые соответствуют множеству (7) и имеют физический смысл вероятности перехода из любого состояния в аварийное (катастрофичное) состояние. Значения m из М элементов матрицы ПВ на (k+1)-ом шаге функционирования последовательно считываются с каждого i-го из 15.41-15.4m исполнительных выходов центрального ОЗУ 1500, где i= 1,2,..., m, на входы соответствующих i-ых исполнительных ОЗУ 15011-1501m, а также на второй вход элемента итерационного сравнения 1503 и на первый вход элемента сравнения 1504. С выхода каждого i-ого из m исполнительных ОЗУ 15011-1501m на первый вход элемента итерационного сравнения 1503 в двоичном коде последовательно считываются хранившиеся в ячейках памяти значения m из М элементов матрицы ПВ на k-ом (предыдущем) шаге функционирования. Кроме того, тактовый импульс, поступающий с тактового входа 150 блока 15 на вход ПЗУ 1502, инициирует считывание в двоичном коде из ячеек памяти ПЗУ 1502 на второй вход элемента сравнения 1504 заранее записанного допустимого значения вероятности перехода моделируемого процесса в аварийное (катастрофичное) состояние из любого другого состояния  в соответствии с выражением (8). На базе элемента сравнения 1504 осуществляется процедура идентификации граничных и аварийных (катастрофичных) состояний моделируемых случайных процессов. Данная процедура осуществляется путем последовательного (пошагового) априорного оценивания и сравнения значений каждого i-го из m элементов матрицы ПВ на (k+1)-ом шаге функционирования, входящих в множество Nm(7), с целью определения наличия или отсутствия возможного превышения этими значениями допустимого порога в соответствии с выражением (8). Таким образом, элемент сравнения 1504 осуществляет пошаговое сравнение последовательно поступающих в двоичном коде с выходов 15041-1504m центрального ОЗУ 1500 m значений аim(k+1), составляющих множество (7) со значением
в соответствии с выражением (8). На базе элемента сравнения 1504 осуществляется процедура идентификации граничных и аварийных (катастрофичных) состояний моделируемых случайных процессов. Данная процедура осуществляется путем последовательного (пошагового) априорного оценивания и сравнения значений каждого i-го из m элементов матрицы ПВ на (k+1)-ом шаге функционирования, входящих в множество Nm(7), с целью определения наличия или отсутствия возможного превышения этими значениями допустимого порога в соответствии с выражением (8). Таким образом, элемент сравнения 1504 осуществляет пошаговое сравнение последовательно поступающих в двоичном коде с выходов 15041-1504m центрального ОЗУ 1500 m значений аim(k+1), составляющих множество (7) со значением  , поступившим с выхода ПЗУ 1502. Непревышение любым i-ым (аim(k+1)) из значений m элементов множества Nm(7) данного порога характеризует невыполнение условия (10) и результат процедуры идентификации (сравнения) выражается в появлении на выходе элемента сравнения 1504 логического нуля, который в двоичном коде поступает на первый вход элемента И 1507. Превышение любым i-ым (aim(k+1)) из значений m элементов множества Nm(7) данного порога характеризует выполнение условия (10) и начало плавного изменения параметров внешних условий и управляющих воздействий, а результат процедуры идентификации (сравнения) выражается в появлении на выходе элемента сравнения 1504 логической единицы, которая в двоичном коде поступает на первый вход элемента И 1507.
, поступившим с выхода ПЗУ 1502. Непревышение любым i-ым (аim(k+1)) из значений m элементов множества Nm(7) данного порога характеризует невыполнение условия (10) и результат процедуры идентификации (сравнения) выражается в появлении на выходе элемента сравнения 1504 логического нуля, который в двоичном коде поступает на первый вход элемента И 1507. Превышение любым i-ым (aim(k+1)) из значений m элементов множества Nm(7) данного порога характеризует выполнение условия (10) и начало плавного изменения параметров внешних условий и управляющих воздействий, а результат процедуры идентификации (сравнения) выражается в появлении на выходе элемента сравнения 1504 логической единицы, которая в двоичном коде поступает на первый вход элемента И 1507.
На базе элемента итерационного сравнения 1503, промежуточного ОЗУ 1505 и промежуточного элемента И 1506 осуществляется процедура верификации граничных и аварийных (катастрофичных) состояний моделируемых случайных процессов. Данная процедура осуществляется в два этапа. Первый этап осуществляется на базе элемента итерационного сравнения 1503 путем последовательного (пошагового) априорного оценивания и сравнения значений каждого i-го из m элементов матрицы ПВ на данном k-ом шаге моделирования со значением этого же элемента на следующем (k+1)-ом шаге в соответствии с выражением (9). С этой целью в элементе итерационного сравнения 1503 осуществляется пошаговое сравнение последовательно и попарно поступающих в двоичном коде с выходов исполнительных ОЗУ 15011-1501m m значений аim(k) элементов матрицы ПВ на данном k-ом шаге моделирования с соответствующими m значениями аim(k+1) этого же элемента на следующем (k+1)-ом шаге, составляющими на данном k-ом шаге множество (7) и поступающими с m выходов 15.41-15.4m центрального ОЗУ 1500. Непревышение любым i-ым (aim(k+1)) из значений m элементов матрицы ПВ на (k+1)-ом шаге соответствующего i-го (аim(k)) из значений m элементов матрицы ПВ на k-ом характеризует невыполнение условия (11), и результат первого этапа процедуры верификации (сравнения последующего значения с предыдущим) выражается в появлении на выходе элемента итерационного сравнения 1503 логического нуля, который в двоичном коде поступает на вход промежуточного ОЗУ 1505 и на второй вход промежуточного элемента И 1506. Превышение любым i-ым (aim(k+1)) из значений m элементов матрицы ПВ на (k+1)-ом шаге соответствующего i-го (аim(k)) из значений m элементов матрицы ПВ на k-ом характеризует выполнение условия (11), имеет физический смысл выявленной тенденции повышения вероятности изменения параметров внешних условий и управляющих воздействий в сторону граничного и аварийного (катастрофичного) состояния моделируемого случайного процесса, а результат первого этапа процедуры верификации (сравнения последующего значения с предыдущим) выражается в появлении на выходе элемента итерационного сравнения 1503 логической единицы, которая в двоичном коде поступает на вход промежуточного ОЗУ 1505 и на второй вход промежуточного элемента И 1506.
Второй этап процедуры верификации в блоке 15 осуществляется на базе промежуточного ОЗУ 1505 и промежуточного элемента И 1506 путем сравнения в промежуточном элементе И 1506 полученного на k-ом шаге результата первого этапа (логический нуль или логическая единица), хранящегося в промежуточном ОЗУ 1505 и поступающего на первый вход промежуточного элемента И 1506, с результатом первого этапа (логический нуль или логическая единица), полученным на (k+1)-ом шаге моделирования и поступающим с выхода элемента итерационного сравнения 1503 на второй вход промежуточного элемента И 1506. Физический смысл второго этапа верификации заключается в подтверждении (собственно верификации) выявленной тенденции повышения вероятности изменения параметров внешних условий и управляющих воздействий в сторону граничного и аварийного (катастрофичного) состояния моделируемого случайного процесса, а результат второго этапа верификации выражается в появлении на выходе промежуточного элемента И 1506 логической единицы или логического нуля, которые в двоичном коде поступают на первый вход элемента И 1507. Если полученный на k-ом шаге результат первого этапа (например, логическая единица) совпадает с результатом первого этапа (логическая единица), полученным на (k+1)-ом шаге моделирования, результат второго этапа процедуры верификации выражается в появлении на выходе промежуточного элемента И 1506 логической единицы. Если полученный на k-ом шаге результат первого этапа (например, логическая единица) не совпадает с результатом первого этапа (логический нуль), полученным на (k+1)-ом шаге моделирования, или полученный на k-ом шаге результат первого этапа представляет собой логический нуль и совпадает с результатом первого этапа (логический нуль), полученным на (k+1)-ом шаге моделирования, результат второго этапа процедуры верификации выражается в появлении на выходе промежуточного элемента И 1506 логического нуля.
Тактовый импульс, поступающий на тактовый вход 54 блока управления 5 инициирует считывание с проверочного выхода 55 блока управления 5 через проверочный вход 153 блока анализа катастроф 15 на второй вход элемента И 1507 логического нуля или логической единицы, характеризующих соответственно запрещение или разрешение пользователя (оператора) на выдачу сигнала оповещения о наличии возможного катастрофического состояния моделируемого процесса.
Если с проверочного входа 153 блока 15 на второй вход элемента И 1507 получена логическая единица (оповещение о возможном катастрофическом состоянии необходимо) и логическая единица получена с выхода элемента сравнения 1504 или с выхода промежуточного элемента И 1506, результат идентификации и верификации граничных и аварийных (катастрофичных) состояний моделируемых случайных процессов выражается в появлении на выходе элемента И 1507 логической единицы. Логическая единица с выхода элемента И 1507 поступает на считывающий вход 15.3 центрального ОЗУ 1500 и запирает центральное ОЗУ 1500, не позволяя М значениям элементов матрицы ПВ (5) считываться с М управляющих выходов 15.21-15.2М центрального ОЗУ 1500 через М управляющих выходов 1521-152М блока 15 на М управляющих входов 211-21М блока 2. Кроме того, логическая единица с выхода элемента И 1507 через предупредительный выход 154 блока 15 поступает на выход "угроза катастрофы" вероятностного автомата, являясь сигналом предсказания и предупреждения, характеризующим наличие возможного катастрофического состояния моделируемого процесса и призывающим пользователя (оператора) произвести внешнюю коррекцию элементов матрицы переходных вероятностей или пороговых значений состояний с целью не допустить аварийного (катастрофичного) скачкообразного изменения состояний моделируемого процесса при малых возмущениях [2].
Если с проверочного входа 153 блока 15 на второй вход элемента И 1507 получен логический нуль (пользователь не нуждается в оповещении о возможном катастрофическом состоянии), а с выхода элемента сравнения 1504 или с выхода промежуточного элемента И 1506 получен либо логический нуль, либо логическая единица, результат идентификации и верификации граничных и аварийных (катастрофичных) состояний моделируемых случайных процессов выражается в появлении на выходе элемента И 1507 логического нуля. Если с проверочного входа 153 блока 15 на второй вход элемента И 1507 получена логическая единица (оповещение о возможном катастрофическом состоянии необходимо), а с выхода элемента сравнения 1504 или с выхода промежуточного элемента И 1506 получен логический нуль, результат идентификации и верификации граничных и аварийных (катастрофичных) состояний моделируемых случайных процессов выражается в появлении на выходе элемента И 1507 логического нуля. Логический нуль с выхода элемента И 1507 поступает на считывающий вход 15.3 центрального ОЗУ 1500 и открывает центральное ОЗУ 1500, позволяя М значениям элементов матрицы ПВ (5) считываться с М управляющих выходов 15.21-15.2М центрального ОЗУ 1500 через М управляющих выходов 1521-152М блока 15 на М управляющих входов 211-21М блока 2. Кроме того, логический нуль с выхода элемента И 1507 через предупредительный выход 154 блока 15 поступает на выход "угроза катастрофы" вероятностного автомата, являясь сигналом предсказания и предупреждения, характеризующим отсутствие возможного катастрофического состояния моделируемого процесса.
Таким образом, наличие на предупредительном выходе 154 блока 15 и на выходе "угроза катастрофы" вероятностного автомата сигнала логической единицы служит показателем блокировки вероятностного автомата, а наличие на предупредительном выходе 154 блока 15 и на выходе "угроза катастрофы" вероятностного автомата сигнала логического нуля служит показателем разблокировки вероятностного автомата в целом.
С управляющего выхода 52 блока управления 5 значения М элементов матрицы ПВ поступают на вход дешифратора 12 и на вход блока формирования значений матрицы 4. Блок формирования значений матрицы 4 предназначен для записи, хранения поступающих значений М элементов матрицы переходных вероятностей, считывания управляющей информации ϕT(k+1,k,u) и представляет собой запоминающее устройство. При поступлении новых управляющих воздействий блок 4 освобождает ячейки памяти, передавая в двоичном коде управляющую информацию (М элементов матрицы ПВ) через М выходов блока формирования значений матрицы 4 на М управляющих входов 1511-151М блока анализа катастроф 15.
Значения М элементов матрицы ПВ поддерживаются постоянными на выходах блока 4 в течение цикла управления и служат для реализации вычислений в соответствии с рассмотренной моделью (1-4). Пороговые значения состояний моделируемого процесса Хпор1-Хпорm-1 в течение цикла управления поддерживаются постоянными на пороговых выходах 531-53m-1 блока управления 5 и служат для реализации вычислений, проводимых в блоке коррекции 3, а также используются для получения элементов вектора предварительных значений индикаторов состояния процесса, осуществляемого в блоке пороговых устройств 6, в соответствии с алгоритмом вычислений, описанным в прототипе (см. патент РФ 2139569).
Моменты выхода автомата из предыдущего состояния определяются генератором тактовых импульсов 8, элементом ИЛИ 14 и элементом ЗАПРЕТ 9 при формировании нулевой комбинации на m выходах блока задания времени 13. С помощью блока элементов И 10 производится запись полученных значений m элементов вектора индикаторов состояний  моделируемого процесса в блок памяти 11, где они хранятся до момента истечения периода k (периода смены состояния), определяемого блоком задания времени 13 по значениям кода, формируемого на основе управляющих воздействий. При этом значения управляющей кодовой последовательности с управляющего выхода 52 блока управления 5 поступают на дешифратор 12, преобразуются им в код, соответствующий временному интервалу периода смены состояний k, записываются через управляющий вход в реверсивный счетчик блока 13 и считываются генератором тактовых импульсов 8 до момента появления нулевой комбинации на m выходах блока 13, свидетельствующей об истечении времени пребывания автомата в данном состоянии.
моделируемого процесса в блок памяти 11, где они хранятся до момента истечения периода k (периода смены состояния), определяемого блоком задания времени 13 по значениям кода, формируемого на основе управляющих воздействий. При этом значения управляющей кодовой последовательности с управляющего выхода 52 блока управления 5 поступают на дешифратор 12, преобразуются им в код, соответствующий временному интервалу периода смены состояний k, записываются через управляющий вход в реверсивный счетчик блока 13 и считываются генератором тактовых импульсов 8 до момента появления нулевой комбинации на m выходах блока 13, свидетельствующей об истечении времени пребывания автомата в данном состоянии.
Управление вероятностно-временным механизмом смены состояний вероятностного автомата и пороговыми значениями состояний осуществляется по управляющим кодовым комбинациям, поступающим соответственно с управляющего выхода 52 и m-1 пороговых выходов 531-53m-1 блока управления 5 в моменты выхода автомата из предыдущего состояния.
В итоге, на предупредительном выходе 154 блока анализа катастроф 15 и на выходе "угроза катастрофы" вероятностного автомата имеем либо сигнал логической единицы, который служит показателем блокировки вероятностного автомата и указывает пользователю (оператору) на необходимость коррекции управляющих воздействий, либо сигнал логического нуля, который служит показателем разблокировки вероятностного автомата и указывает на отсутствие тенденции к аварийному (катастрофичному) скачкообразному изменению состояний моделируемого процесса при малых возмущениях. Если вероятностный автомат заблокирован (на выходе "угроза катастрофы" логическая единица), моделирование невозможно и на m выходах блока 13 и на m выходах "индикаторы состояния" вероятностного автомата нет значений индикаторов состояния. Если вероятностный автомат разблокирован (на выходе "угроза катастрофы" логический нуль), на m выходах блока 13 и на m выходах "индикаторы состояния" вероятностного автомата имеем записанные в двоичном коде значения индикаторов состояния управляемого вероятностного автомата в каждый из моментов времени (определяемых генератором тактовых импульсов 8) с учетом управляющих воздействий и динамически изменяемых пороговых значений (границ) состояний моделируемого процесса.
Таким образом, анализ принципа работы заявляемого вероятностного автомата показывает очевидность того факта, что наряду с сохраненными возможностями моделирования управляемых полумарковских цепей с динамической коррекцией пороговых значений (границ) состояний моделируемых случайных процессов автомат способен производить идентификацию и верификацию граничных и аварийных (катастрофичных) состояний моделируемых случайных процессов при плавных изменениях параметров внешних условий и управляющих воздействий, имеющих место в реальных сетях многоканальной радиосвязи, способен оповещать (предупреждать) пользователя (оператора), осуществляющего моделирование, о возможном аварийном состоянии моделируемого процесса. Данный вероятностный автомат позволяет проводить, на своей основе, идентификацию, верификацию и априорное предупреждение об аварийных (катастрофичных) условиях функционирования сети и управленческих решениях, принимаемых в контуре управления сетью многоканальной радиосвязи, а значит позволяет повысить степень адекватности модели и уровень достоверности результатов моделирования, позволяет повысить обоснованность принимаемых решений по управлению структурой, параметрами и режимами работы сети многоканальной радиосвязи, что существенно расширяет функциональные возможности аппаратуры, где заявленный вероятностный автомат будет использован.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Арнольд В.И. Теория катастроф. -М.: Наука, 1990. -128 с.;
2. Постон Т., Стюарт И. Теория катастроф и ее приложения. Пер. с англ. -М.: Мир, 1980. - 608 с.;
3. Петров Ю.П, Петров Л.Ю. Неожиданное в математике и его связь с авариями и катастрофами последних лет. -СПб.: НИИХ СПбГУ, 1999. - 108 с.;
4. Сейдж Э., Уайт Ч. Оптимальное управление системами. -М.: Радио и связь, 1982. - 92 с.;
5. Ненадович Д. М., Паращук И.Б., Терентьев В.М. Математическая модель процесса функционирования и оценка состояния пакетной сети спутниковой связи. //Журнал "Радиотехника" 6, 1996, с.9-13;
6. Сейдж Э. , Мелс Дж. Теория оценивания и ее применение в связи и управлении. -М.: Связь, 1976. -496 с.;
7. Терентьев В.М., Паращук И.Б. Теоретические основы управления сетями многоканальной радиосвязи. -СПб.: ВАС, 1995. -196 с.;
8. Шило В. Л. Популярные цифровые микросхемы: Справочник. -М.: Радио и связь, 1987.-352 с.;
9. Гусев В.В., Лебедев О.Н., Сидоров А.М. Основы импульсной и цифровой техники. -СПб.: СПВВИУС, 1995, - 248 с.;
10. Соботка З. , Стары Я. Микропроцессорные системы. -М.: Энергоиздат, 1981, -340 с.;
11. Быстров Ю.А., Великсон Я.М., Вогман В.Д. и др. Электроника: Справочная книга / Под ред. Быстрова Ю.А. -СПб.: Энергоатомиздат, 1996, -544 с.;
12. Мальцева Л.А., Франберг Э.М., Ямпольский B.C. Основы цифровой техники. -М.: Радио и связь, 1980. - 439 с.;
13. Богданович М.И., Грель И.Н., Прохоренко В.А. и др. Цифровые интегральные микросхемы: Справочник. -Минск: Беларусь, 1991, -493 с.;
14. Фролкин В.Т., Попов Л.Н. Импульсные и цифровые устройства. -М.: Радио и связь, 1992, -335 с.;
15. Терентьев В.М., Паращук И.Б., Белобров Е.Г. Аналитическая модель формирования цепи Маркова для анализа отклонений показателей качества от требуемых значений. // Научно-технический сборник 59.-СПб.: ВАС, 1996, с. 41-45.
16. Справочник по специальным функциям с формулами, графиками и таблицами./Под ред. Абрамовица М. и Стигана И., -М.: Наука, 1979, - 832 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕРОЯТНОСТНЫЙ АВТОМАТ | 2000 |
|
RU2169944C1 |
| ВЕРОЯТНОСТНЫЙ АВТОМАТ | 2005 |
|
RU2276402C1 |
| ВЕРОЯТНОСТНЫЙ АВТОМАТ | 1998 |
|
RU2139569C1 |
| ВЕРОЯТНОСТНЫЙ АВТОМАТ | 2021 |
|
RU2777531C1 |
| Устройство для обучения операторов | 2016 |
|
RU2615836C1 |
| УСТРОЙСТВО ОБСЛУЖИВАНИЯ РАЗНОПРИОРИТЕТНЫХ ЗАПРОСОВ АБОНЕНТОВ ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ | 2015 |
|
RU2589363C1 |
| ВЕРОЯТНОСТНЫЙ АВТОМАТ | 2018 |
|
RU2718214C1 |
| Устройство для прогнозирования случайных событий | 2019 |
|
RU2705010C1 |
| УСТРОЙСТВО ПОИСКА ИНФОРМАЦИИ | 2022 |
|
RU2792840C1 |
| УСТРОЙСТВО ДЛЯ ПАРАМЕТРИЧЕСКОЙ ОЦЕНКИ ЗАКОНА РАСПРЕДЕЛЕНИЯ ПОТОКОВ СООБЩЕНИЙ | 2020 |
|
RU2750287C1 |
Изобретение относится к радиотехнике и вычислительной технике и предназначено для использования в комплексах автоматизированных систем управления сетями многоканальной радиосвязи. Техническим результатом изобретения является создание управляемого вероятностного автомата, позволяющего моделировать управляемые полумарковские цепи, идентифицируя и верифицируя граничные и аварийные (катастрофичные) состояния моделируемых случайных процессов при плавных изменениях параметров внешних условий и управляющих воздействий. Вероятностный автомат содержит датчик случайной последовательности, блок формирования нецелочисленных значений индикаторов, блок коррекции, блок формирования значений матрицы, блок управления, блок пороговых устройств, блок формирования значений индикаторов, генератор тактовых импульсов, элемент ЗАПРЕТ, блок элементов И, блок памяти, дешифратор, блок задания времени, элемент ИЛИ, блок анализа катастроф. 2 з.п.ф-лы, 3 ил.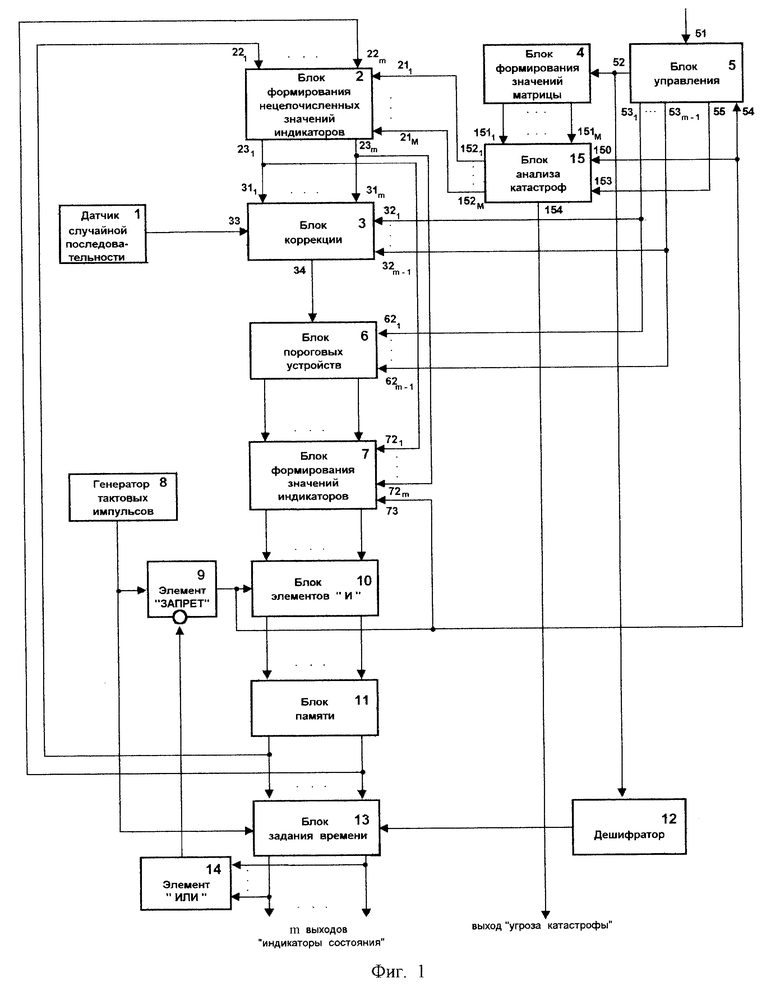
| ВЕРОЯТНОСТНЫЙ АВТОМАТ | 1998 |
|
RU2139569C1 |
| ВЕРОЯТНОСТНЫЙ АВТОМАТ | 1994 |
|
RU2099781C1 |
| ВЕРОЯТНОСТНЫЙ АВТОМАТ | 2000 |
|
RU2169944C1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ СИСТЕМ ПЕРЕДАЧИ ДАННЫХ | 1991 |
|
RU2029364C1 |
| RU 94042181 C1, 27.09.1996 | |||
| НЕЧЕТКИЙ ВЕРОЯТНОСТНЫЙ АВТОМАТ | 1995 |
|
RU2110090C1 |
| US 6009445 А, 28.12.1999. | |||
