Область техники
Изобретение относится к способу определения положения по меньшей мере одной кромки (одного края) объекта, в частности шнуровидного объекта. Таким объектом может быть, например, кабель, содержащий проводник и окружающую его изолирующую оболочку.
Уровень техники
Существует потребность в измерении подобных объектов, в частности в определении положения или диаметра. Оптические измерения различных изделий в виде шнуровидных объектов известны, например, из ЕР 0924493 В1. Здесь описано применение когерентного монохроматического излучения, предпочтительно от лазерного диода. Тень от шнуровидного объекта, подлежащего измерению, проецируется (без использования оптики для формирования изображения) на оптический датчик. Данный способ по сравнению со способами измерения, использующими оптику указанного типа, позволяет обеспечить высокоточные измерения при сравнительно малых размерах измерительного устройства. При использовании источника когерентного монохроматического излучения на геометрических краях шнуровидного объекта образуется дифракционная кайма, причем положение этих краев может быть определено по их зарегистрированной дифракционной кайме. Это можно сделать, например, путем сравнения с референтной дифракционной картиной, известной из теории дифракции. Свободные параметры этой референтной картины, в частности ее протяженность и локальный сдвиг, изменяют до достижения оптимальной корреляции (оптимального соответствия) между референтным дифракционным паттерном и профилем интенсивности измеренной дифракционной каймы. Однако обеспечение такой корреляции требует относительно большого объема вычислений. Поэтому, как альтернатива, оценивают параметры положения особых точек дифракционной каймы, например интенсивность локальных максимумов и минимумов, по которой можно затем определить положение краев геометрической тени.
В то время как корреляционные способы требуют (как отмечено выше) очень большого объема вычислений, определение характеристик особых точек дифракционной каймы производится быстро и обеспечивает очень высокую точность измерений для большинства приложений. Однако, поскольку такой анализ использует только ограниченное количество особых характеристических точек дифракционной каймы, если эти особые точки искажены, результат может оказаться ошибочным. Данная ситуация возможна, например, при существенном загрязнении оптической системы или при измерении прозрачных или очень тонких шнуровидных объектов. В таких случаях могут иметь место искажения дифракционной каймы и, следовательно, также и искажения особых характеристических точек вследствие проникновения части излучения (например, света) через прозрачный материал, подлежащий измерению. В случае очень тонких шнуровидных объектов искажения могут быть обусловлены взаимной интерференцией дифракционных картин с каждой стороны.
Раскрытие изобретения
С учетом рассмотренного уровня техники задача, на решение которой направлено изобретение, состоит в создании способа описанного типа, который обеспечит надежный результат измерений даже в случае искажений дифракционной каймы и, одновременно, высокую скорость измерений и анализа.
Данная задача решена группой изобретений, охарактеризованных в независимых п.п. 1, 2 и 3 прилагаемой формулы. Предпочтительные варианты раскрыты в зависимых пунктах, в описании и на чертежах.
В рамках первого аспекта изобретения поставленная задача решена созданием способа определения положения по меньшей мере одного края объекта, в частности шнуровидного объекта, причем данный способ включает следующие операции:
- освещение объекта излучением по меньшей мере одного когерентного источника излучения с образованием дифракционной каймы на обоих краях геометрической тени, отбрасываемой объектом,
- регистрацию пространственного профиля интенсивности по меньшей мере одной дифракционной каймы с помощью по меньшей мере одного линейного или полилинейного оптического датчика,
- дифференцирование по меньшей мере одного зарегистрированного профиля интенсивности по координате, совпадающей с осью расположения элементов приемника, и построение графика результирующего профиля по квадратичной координатной оси,
- сравнение по меньшей мере одного зарегистрированного профиля интенсивности, продифференцированного по указанной координате и построенного по квадратичной координатной оси, по меньшей мере с одним периодическим референтным профилем интенсивности,
- определение, на основе выполненного сравнения, положения по меньшей мере одного края объекта.
В рамках второго аспекта изобретения поставленная задача также решена созданием способа определения положения по меньшей мере одного края объекта, в частности шнуровидного объекта, причем данный способ включает следующие операции:
- освещение объекта излучением по меньшей мере одного когерентного источника излучения с образованием дифракционной каймы на обоих краях геометрической тени, отбрасываемой объектом,
- регистрацию пространственного профиля интенсивности по меньшей мере одной дифракционной каймы с помощью по меньшей мере одного линейного или полилинейного оптического датчика,
- дифференцирование по меньшей мере одного зарегистрированного профиля интенсивности по координате, совпадающей с осью расположения элементов приемника,
- сравнение по меньшей мере одного зарегистрированного профиля интенсивности, продифференцированного по указанной координате, по меньшей мере с одним референтным профилем интенсивности, полученным из периодической функции, период которой имеет, по существу, обратную линейную зависимость от указанной координаты,
- определение, на основе выполненного сравнения, положения по меньшей мере одного края объекта.
В рамках третьего аспекта изобретения поставленная задача также решена созданием способа определения положения по меньшей мере одного края объекта, в частности шнуровидного объекта, причем данный способ включает следующие операции:
- освещение объекта излучением по меньшей мере одного когерентного источника излучения с образованием дифракционной каймы на обоих краях геометрической тени, отбрасываемой объектом,
- регистрацию пространственного профиля интенсивности по меньшей мере одной дифракционной каймы с помощью по меньшей мере одного линейного или полилинейного оптического датчика,
- сравнение по меньшей мере одного зарегистрированного профиля интенсивности по меньшей мере с одним периодическим референтным профилем интенсивности, полученным из периодической функции, период которой имеет, по существу, обратную линейную зависимость от указанной координаты, причем указанная функция проинтегрирована по координате,
- определение, на основе выполненного сравнения, положения по меньшей мере одного края объекта.
Геометрические края непосредственно представляют информацию о положении объекта. В данном контексте определение положения объекта включает также, например, определение положения только одного края объекта. Изобретение использует схему измерений, принципы которой известны из ЕР 0924493 В1. Объект, конкретно шнуровидный объект, может иметь поперечное сечение, близкое к круглому. Объектом может быть кабель, в частности кабель, содержащий по меньшей мере один проводник и по меньшей мере окружающую его изолирующую оболочку. При этом по меньшей мере один источник когерентного излучения может испускать, в частности, монохроматическое излучение. Источником излучения может быть лазер, в частности, диодный лазер (т.е. лазерный диод). Оптическим датчиком может быть, например, ПЗС- или КМОП-датчик, в частности линейный ПЗС- или КМОП-датчик.
Согласно изобретению анализируются профили интенсивности излучения в зоне дифракции Френеля, которые при использовании источника когерентного оптического излучения формируются на датчике, находящемся на не очень большом расстоянии позади объекта. Дифракционные профили могут быть описаны математически с использованием интегралов Френеля. Однако для этих интегралов не существует замкнутого аналитического решения, с помощью которого можно провести простой расчет референтных профилей интенсивности для дифракционной каймы. Как уже упоминалось, из ЕР 0924493 В1 известен способ коррелирования (установления соответствия), в котором измеренные профили в дифракционной кайме сравнивают с референтными профилями. Однако этот способ практически непригоден для достижения точности измерений в субмикронном диапазоне, поскольку требует запоминания очень больших количеств референтных профилей.
Согласно изобретению положение объекта определяют на основе сравнения или установления соответствия между по меньшей мере одним зарегистрированным профилем интенсивности и по меньшей мере одним референтным профилем интенсивности. Конкретный край геометрической тени и, следовательно, конкретное положение объекта могут быть соотнесены, например эмпирически, с референтным профилем интенсивности. Все три аспекта изобретения основываются на осознании того, что между периодом зарегистрированных профилей в дифракционной кайме и соответствующей продольной координатой используемого датчика существует обратная линейная (inverse linear) или почти линейная зависимость. Таким образом, период уменьшается пропорционально 1/(х-хgео), где х - это координата, а хgео - положение (координата) края геометрической тени. Понимание данной зависимости позволяет сравнивать измеренные профили интенсивности с референтными профилями интенсивности, для которых также существует подобная линейная или почти линейная обратная зависимость их периода от продольной координаты. Соответственно, данная координата х в аргументе функций референтных профилей интенсивности также возводится в квадрат.
Кроме того, все три аспекта изобретения основываются на понимании того, что периодическая функция, которая очень хорошо аппроксимируется, в частности, синусной функцией, может быть сгенерирована по зарегистрированному профилю I(х) дифракционной каймы, формируемой у края объекта, путем дифференцирования интенсивности по координате и построения графика этой производной по "квадратичной" координатной оси х (поскольку такое построение позволяет получить периодический профиль). Данная операция означает, что в качестве аргумента периодической функции используется  где V(x)=х2. Таким образом, при использовании аппроксимации синусной функцией для обработанного описанным образом профиля в дифракционной кайме у края объекта справедлива формула:
где V(x)=х2. Таким образом, при использовании аппроксимации синусной функцией для обработанного описанным образом профиля в дифракционной кайме у края объекта справедлива формула:
Следовательно, применяя синусную функцию, можно сгенерировать референтный профиль IRef(x), который очень хорошо соответствует зарегистрированному профилю интенсивности. С этой целью в качестве аргумента синусной функции используется х2, а полученные значения функции интегрируют по координате:

В рамках первого аспекта изобретения две описанные операции (дифференцирование по координате и построение с использованием "квадратичной" координатной оси) используют применительно к зарегистрированному профилю интенсивности, а полученный результат сравнивают непосредственно с периодической, например синусной, функцией. Согласно второму аспекту первую из двух названных операций, дифференцирование по координате, также используют применительно к зарегистрированному профилю интенсивности. Полученный в результате профиль сравнивают с референтным профилем интенсивности, который получают, например, из синусной функции, аргументом в которой является х2. В этом случае референтным профилем интенсивности является профиль, период которого имеет обратную линейную зависимость от координаты. В отличие от второго аспекта, согласно третьему аспекту изобретения дифференцирование зарегистрированного профиля интенсивности по координате заменено интегрированием по координате с получением референтного профиля интенсивности. Таким образом, согласно третьему аспекту референтный профиль интенсивности генерируют в соответствии с уравнением (1). Все три аспекта изобретения будут более подробно описаны далее со ссылками на фиг. 6-8.
Важно отметить, что все три аспекта изобретения имеют общую основу, а различия между ними заключаются только в том, подвергается ли обработке, в частности математической (и, если да, то в какой степени), измеренный профиль интенсивности до проведения сравнения. В зависимости от этого для сравнения выбирается соответствующий референтный профиль интенсивности. Должно быть понятно, что для референтных профилей интенсивности, в частности, в рамках второго и третьего аспектов изобретения, нет необходимости получать обратные функции для осуществления первой и второй операций. Действительно, согласно способу по изобретению они уже могут храниться в качестве записанных референтных профилей в соответствии с изобретением. При этом они должны соответствовать функциям, а именно периодическим функциям (например периодической синусной функции), полученным в результате использования одной или обоих обратных математических преобразований. Необходимо также учитывать, что одна или все операции способа по изобретению согласно одному или более, в частности всем трем, аспектам можно также выполнять параллельно, например частично, или полностью одновременно.
Периодическую, например синусную, функцию намного легче анализировать, чем другие функции, в частности применительно к прозрачным или очень тонким объектам, в том отношении, что по меньшей мере один зарегистрированный профиль интенсивности сравнивается или приводится в соответствие с периодическим референтным профилем интенсивности, в частности с синусоидальным референтным профилем интенсивности. Например, если первоначально зарегистрированный профиль интенсивности имеет существенные разрывы, которые усложнили бы анализ или даже сделали его невозможным, использование первой производной профилей интенсивности по координате и перестройки профиля по квадратичной координатной оси позволит сгенерировать профиль, который очень хорошо аппроксимируется синусоидальным профилем. При этом важная информация по этому синусоидальному профилю, такая как фаза и частота, может быть извлечена даже при наличии значительных разрывов в зарегистрированном профиле дифракционной каймы. Как уже отмечалось, изобретение основано на понимании того, что период интенсивности флуктуации в картине дифракции Френеля на краю объекта изменяется обратно пропорционально линейной функции координаты, в частности линейной функции расстояния до края геометрической тени. Основываясь на этом понимании, можно в процессе анализа генерировать референтные профили, требуемые для коррелирования. Таким образом, коррелирование не ограничивается референтными профилями, записанными заранее для дискретных положений края, а может быть проведено с необходимой точностью по координате для любого произвольного положения края. Это позволяет достичь желательной высокой точности измерений диаметра.
Референтные профили дифракционной каймы, которые очень хорошо аппроксимируют теоретический профиль, могут генерироваться (в процессе анализа) при использовании следующего уравнения для производной интенсивности I излучения по координате:

где Т - период, а хgео - координата края геометрической тени, отбрасываемой объектом. Для зависимости периода от координаты, T(Δх), справедливо соотношение:  где Т0 - константа, которая будет рассмотрена далее.
где Т0 - константа, которая будет рассмотрена далее.
Референтный профиль интенсивности, который должен сравниваться с измеренным профилем интенсивности, получают, например, численным интегрированием профиля согласно уравнению (2). Такой способ позволяет сделать анализ более простым и быстрым, чем известные методы анализа. Это справедливо и в случае искажений дифракционной каймы, которые имеют место, например, применительно к прозрачным или очень тонким шнуровидным объектам (с диаметром менее 1 мм, особенно менее 0,5 мм).
В процессе производства кабелей на проводник наносят изолирующую оболочку, используя, например, экструзионный процесс, позволяющий обеспечить высокую производительность. Как правило, необходимо проверять положение объекта, а также правильность нанесения изоляции. Такая проверка предпочтительно проводится в процессе изготовления, т.е. на производственной линии. В частности, объект может перемещаться вдоль своей продольной оси при непрерывном определении положения объекта. Таким образом, объект непрерывно освещают, регистрируют профили интенсивности в дифракционной кайме и анализируют эти профили согласно изобретению. В результате становится возможным мониторинг положения и/или диаметра по ходу процесса. Измерение профилей интенсивности и анализ согласно изобретению можно производить, например, через регулярные интервалы или даже с максимально возможной частотой.
Используя сравнение согласно изобретению можно получить информацию различных типов. Например, чтобы определить диаметр объекта, могут быть определены оба геометрических края отбрасываемой им тени. Объект отбрасывает тень при его освещении. Два края тени, формируемой объектом при его освещении, в частности, в направлении, перпендикулярном его продольной оси, дают важную информацию о диаметре объекта. Вследствие дифракционных эффектов положения геометрических краев не могут быть считаны непосредственно с оптического датчика, а должны быть определены согласно изобретению. Край геометрической тени может быть детектирован в каждом случае по его дифракционной кайме. Если анализируется дифракционная кайма по обоим краям освещаемого объекта, могут быть определены оба геометрических края, т.е. положения этих краев. В принципе, две дифракционные каймы, образованные при дифракции на двух краях освещаемого объекта, могут анализироваться по отдельности или совместно. В частности, дифракционная кайма в каждом случае может быть скоррелирована или сопоставлена с соответствующим референтным профилем интенсивности. Альтернативно, две зарегистрированные дифракционные каймы могут быть приведены во взаимное соответствие (скоррелированы одна с другой) или совместно сопоставлены с соответствующим референтным профилем интенсивности для обоих краев объекта.
Для производной зарегистрированного профиля дифракционной каймы по координате может быть использовано следующее математическое приближение:
где
I: интенсивность оптического излучения,
А: амплитудный коэффициент,
х: координатная ось (ось, вдоль которой расположены элементы приемника),
хgео: край геометрической тени,
Т0: период синусоидального профиля.
Период T0 зависит от положения дифрагирующего края объекта в измерительном пространстве. При этом положение хgео края геометрической тени и период T0 могут быть определены путем коррелирования производной  измеренного профиля I в дифракционной кайме по координате с референтными синусоидальными профилями согласно Ур. (2) при варьировании свободных параметров Т0 и хgео в этом уравнении. Таким образом, коррелирование должно проводиться по двум параметрам.
измеренного профиля I в дифракционной кайме по координате с референтными синусоидальными профилями согласно Ур. (2) при варьировании свободных параметров Т0 и хgео в этом уравнении. Таким образом, коррелирование должно проводиться по двум параметрам.
Если ввести зависящую от координаты частоту f=1/Т0⋅(х-хgео), положение хgео края геометрической тени может быть интерпретировано, как фазовый сдвиг ϕ синусоидального профиля:
Определение частоты f0=1/T0 и фазового сдвига ϕ зарегистрированного профиля в дифракционной кайме позволяет сделать заключение о положении хgео края геометрической тени, а также о положении объекта, обусловившего дифракцию в измерительном пространстве. Если этот анализ был проведен для двусторонней дифракционной каймы, из полученных данных могут быть определены диаметр объекта и его положение в измерительном пространстве.
Как уже упоминалось, по меньшей мере один периодический референтный профиль интенсивности может быть синусоидальным референтным профилем, т.е. периодическая функция может быть синусной функцией. В этом случае возможен особенно простой и быстрый анализ. Однако по меньшей мере один периодический референтный профиль интенсивности может быть выбран и из периодического прямоугольного, треугольного или трапецеидального профиля, и/или периодическая функция может быть периодической прямоугольной, треугольной или трапецеидальной функцией. Кроме того, до проведения сравнения с референтным профилем интенсивности по зарегистрированному профилю интенсивности может быть сгенерирован, с использованием ограничения по амплитуде, двоичный сигнал. Для проведения этой операции может быть задана пороговая интенсивность, например, после получения производной по координате и/или после масштабирования по "квадратичной" оси. Если интенсивность сигнала превышает пороговую, значение двоичного сигнала задается равным 1, а если интенсивность сигнала ниже пороговой, это значение принимается равным 0. Такой прямоугольный профиль упрощает и ускоряет анализ, поскольку цифровые сигналы легче обрабатывать. Это справедливо, в частности, и для использования цифровой петли фазовой синхронизации.
При проведении сравнения согласно изобретению параметр по меньшей мере одного зарегистрированного профиля интенсивности и/или по меньшей мере одного референтного профиля интенсивности, характеризующий соответствующий геометрический край тени, отбрасываемой объектом, можно варьировать до достижения наилучшего возможного взаимного соответствия профилей интенсивности, сравниваемых друг с другом. В рамках этой операции коррелирования варьирование параметра, характеризующего геометрический край тени, отбрасываемой объектом, может начинаться в каждом случае со значения, которое при ближайшем предыдущем варьировании обеспечило наилучшее возможное соответствие с референтным профилем интенсивности. Таким образом, в этом варианте сравнение всегда начинают с параметра, который в предыдущем измерении наилучшим образом соответствовал референтному профилю интенсивности. В данном случае используется тот факт, что положение и диаметр объекта и, следовательно, главные параметры профиля интенсивности в интервале между последовательными измерениями, в частности выполненными с небольшой задержкой одно относительно другого, изменяются только в малой степени. Поэтому начальная точка для сравнения находится довольно близко к желательному результату. Благодаря этому можно сократить временные и вычислительные затраты на анализ. Первое сравнение, для которого не существует "предшествующего значения параметра", может начинаться с ранее определенного стандартного значения.
В качестве параметра, который характеризует соответствующий геометрический край тени, отбрасываемой объектом, и который можно варьировать в процессе проведения сравнения согласно изобретению, может быть выбрана фаза, в частности, по меньшей мере одного зарегистрированного профиля интенсивности и/или по меньшей мере одного референтного профиля интенсивности. Согласно первому аспекту изобретения это варьирование можно проводить, например, основываясь на производной зарегистрированного профиля интенсивности по координате, до получения в результате синусной функции. Согласно приведенным выше уравнениям это имеет место, когда начало координатной оси соответствует краю геометрической тени. Следовательно, фаза непосредственно коррелирует с краем геометрической тени. При использовании метода коррелирования искомым референтным профилем может быть профиль, который оптимально соответствует этой результирующей синусной функции. По этим данным может быть определено абсолютное значение края геометрической тени. В процессе проведения сравнения согласно изобретению может варьироваться также частота по меньшей мере одного зарегистрированного профиля интенсивности и/или по меньшей мере одного референтного профиля интенсивности. Частота коррелирует непосредственно с положением объекта в измерительном пространстве оптического датчика.
Чтобы определить диаметр объекта, может оказаться необходимым, в частности, рассмотреть геометрические края геометрической тени, а также положение объекта, в частности расстояние от объекта до датчика. Это расстояние может испытывать естественные флуктуации, особенно в случае движения объекта. Поэтому может потребоваться постоянное отслеживание расстояния. Как было отмечено выше, в случае, если оба края геометрической тени и положение должны определяться с использованием корреляции, необходимо проводить сравнение по двум параметрам ("двумерное" сравнение) или, соответственно, двумерное коррелирование. Такие операции требуют относительно значительных вычислительных затрат и тем самым создают существенные проблемы, особенно в случае высоких скоростей в процессе изготовления. В связи с этим может быть предусмотрено дополнительное освещение объекта излучением по меньшей мере второго источника когерентного излучения, направление главного пучка которого, по существу, перпендикулярно оси пучка первого источника когерентного излучения. В этом случае вторым источником когерентного излучения на обоих краях геометрической тени, отбрасываемой объектом, также создается дифракционная кайма, причем пространственный профиль интенсивности по меньшей мере в одной дифракционной кайме, образованной вторым источником когерентного излучения, регистрируют по меньшей мере одним вторым линейным или полилинейным оптическим датчиком и по результатам регистрации определяют расстояние объекта от первого оптического датчика. Определение положения объекта в измерительном пространстве является наиболее легким, особенно при использовании дифракционной каймы, обеспечиваемой вторым источником излучения. Частота f0=1/T0 профиля в дифракционной кайме, определенная согласно изобретению, уже известна. Требуемое сравнение или, соответственно, требуемое коррелирование в этом случае касается только фазового сдвига или, соответственно, края геометрической тени. Однако такое коррелирование является только одномерным, т.е. требует соответственно меньших вычислительных усилий.
Сравнение или, соответственно, коррелирование по меньшей мере одного зарегистрированного профиля интенсивности с референтным профилем интенсивности может быть проведено с использованием петли фазовой синхронизации (ПФС). При использовании такой петли можно быстро провести требуемое варьирование частоты и/или фазы, чтобы получить наилучшее возможное соответствие зарегистрированного и, возможно, прошедшего математическую обработку профиля интенсивности с периодическим референтным профилем, в частности, с синусоидальным референтным профилем. Согласно одному варианту сравнение по меньшей мере одного зарегистрированного профиля интенсивности с референтным профилем интенсивности можно также провести с использованием анализа Фурье.
Направление главного пучка по меньшей мере одного источника когерентного излучения может быть, по существу, перпендикулярным продольной оси объекта. По меньшей мере один источник когерентного излучения может быть, по существу, точечным. Альтернативно или дополнительно, по меньшей мере один источник когерентного излучения может освещать объект веерообразным пучком излучения. Если используется несколько источников излучения, указанные признаки могут иметь место в каждом случае для всех источников излучения. Далее, может быть предусмотрено, чтобы по меньшей мере между одним источником когерентного излучения и объектом и/или между объектом и по меньшей мере одним оптическим датчиком не имелось никаких оптических элементов, деформирующих или отклоняющих световое излучение. В частности, при такой конструкции по меньшей мере между одним источником когерентного излучения и объектом и/или между объектом и по меньшей мере одним оптическим датчиком не присутствуют никакие оптические компоненты для формирования изображения. Это позволяет получить более простую и компактную схему, тогда как анализ по способу согласно изобретению обеспечивает в то же время надежное определение положения и/или диаметра объекта.
По меньшей мере один оптический датчик может быть, как было упомянуто, линейным датчиком, установленным напротив по меньшей мере одного источника когерентного излучения. При этом измерительная ось по меньшей мере одного оптического датчика может быть, по существу, перпендикулярна оси пучка по меньшей мере одного источника когерентного излучения. Измерительная ось в данном контексте принимается совпадающей с направлением, вдоль которого расположены элементы линейного датчика. Разумеется, возможно использование полилинейного (матричного) датчика. В этом случае множество линий ориентировано перпендикулярно оси пучка источника излучения. При использовании матричного датчика каждая его линия может анализироваться индивидуально.
Объект может быть по меньшей мере частично прозрачным, по меньшей мере для излучения источника когерентного излучения. При этом объект может иметь диаметр менее 1 мм, предпочтительно менее 0,5 мм. Как уже упоминалось, анализ в рамках способа по изобретению имеет преимущества, в частности, применительно к прозрачным и очень тонким шнуровидным объектам, использование по отношению к которым известных способов анализа приводит к ошибкам.
Способ по изобретению почти полностью использует информацию, содержащуюся в дифракционной кайме, т.е. в предельно узкой полосе. Как это было отмечено, искажения дифракционной каймы практически не оказывают или оказывают только минимальное влияние на результат анализа, в частности анализа геометрических краев тени, поскольку частотный спектр искажений лежит, в основном, вне узкой полосы частот фильтра, применяемого при анализе согласно изобретению. При использовании способа по изобретению определение границ тени и, вместе с ними, диаметра объекта является значительно более прецизионным и менее подверженным помехам, чем в известных способах. Соответственно повышаются точность и надежность измерений. Кроме того, расширяется область применения подобных способов анализа, которые становятся, в частности, пригодными для измерения прозрачных изделий, например стеклянных волокон, стержней, трубок и т.д.
Краткое описание чертежей
Далее, со ссылкой на прилагаемые чертежи, будет подробно описан вариант изобретения, приводимый в качестве примера.
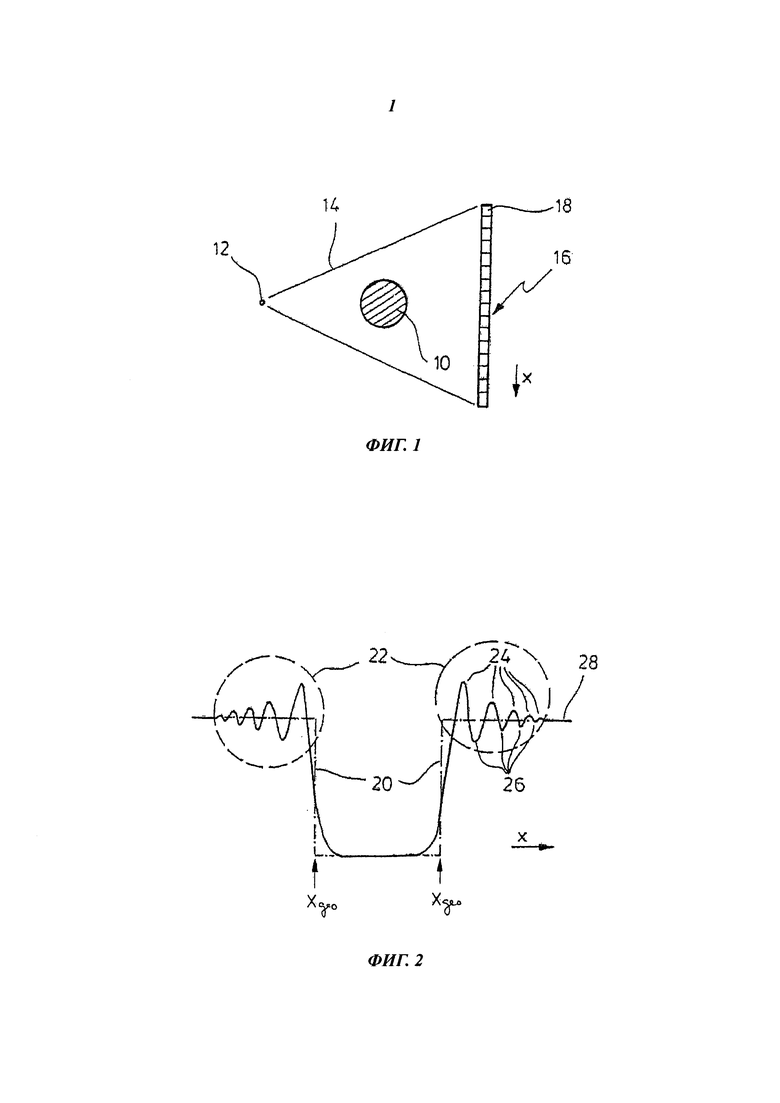
На фиг. 1 представлено измерительное устройство для осуществления способа по изобретению.
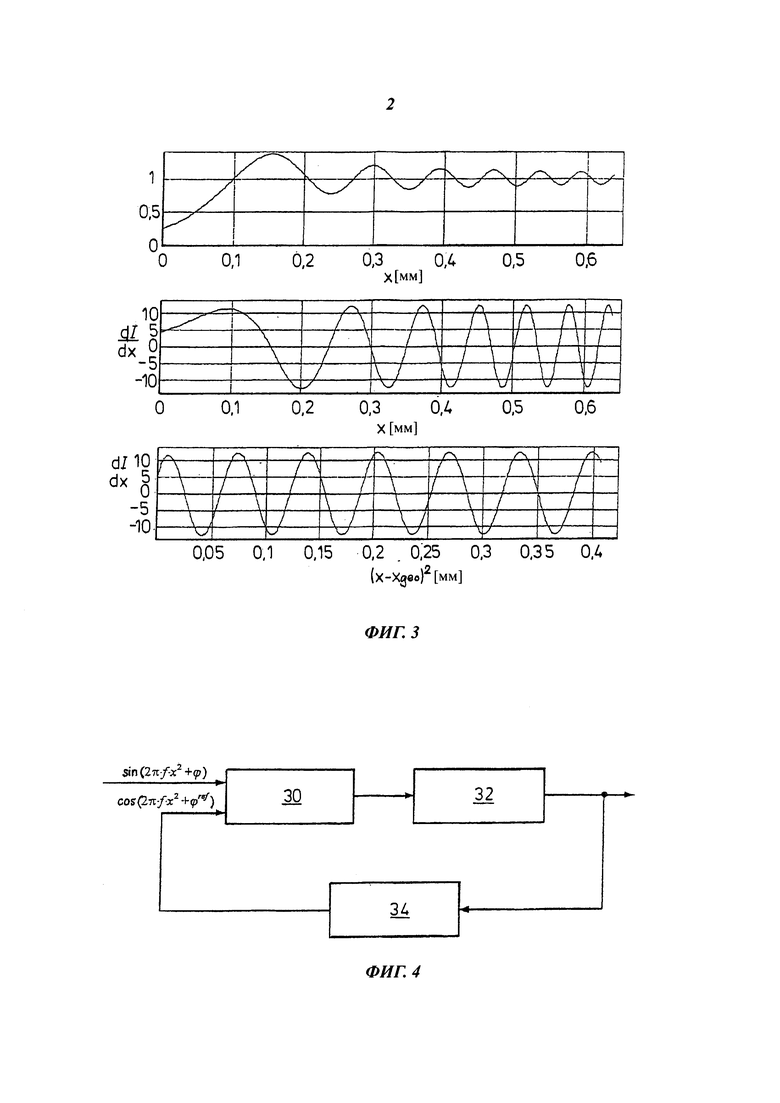
На фиг. 2 изображено идеализированное представление профиля интенсивности, формируемого на оптическом датчике по фиг. 1.
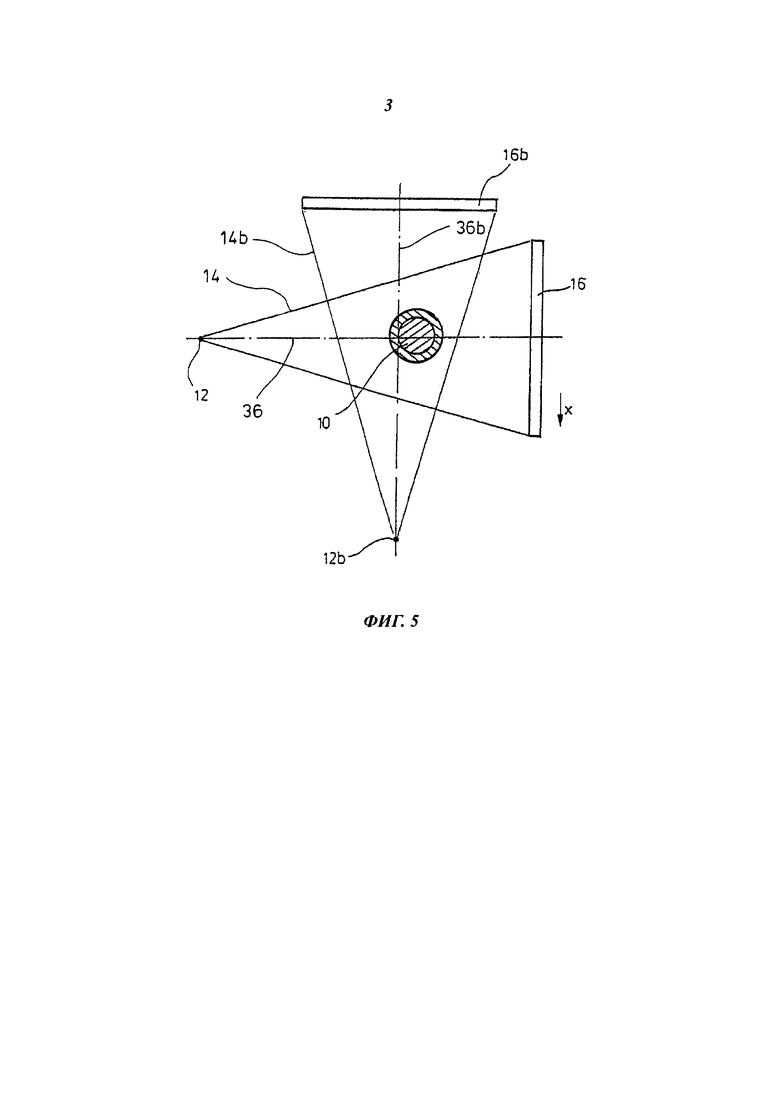
На фиг. 3 приведены три графика, иллюстрирующих способ по изобретению.
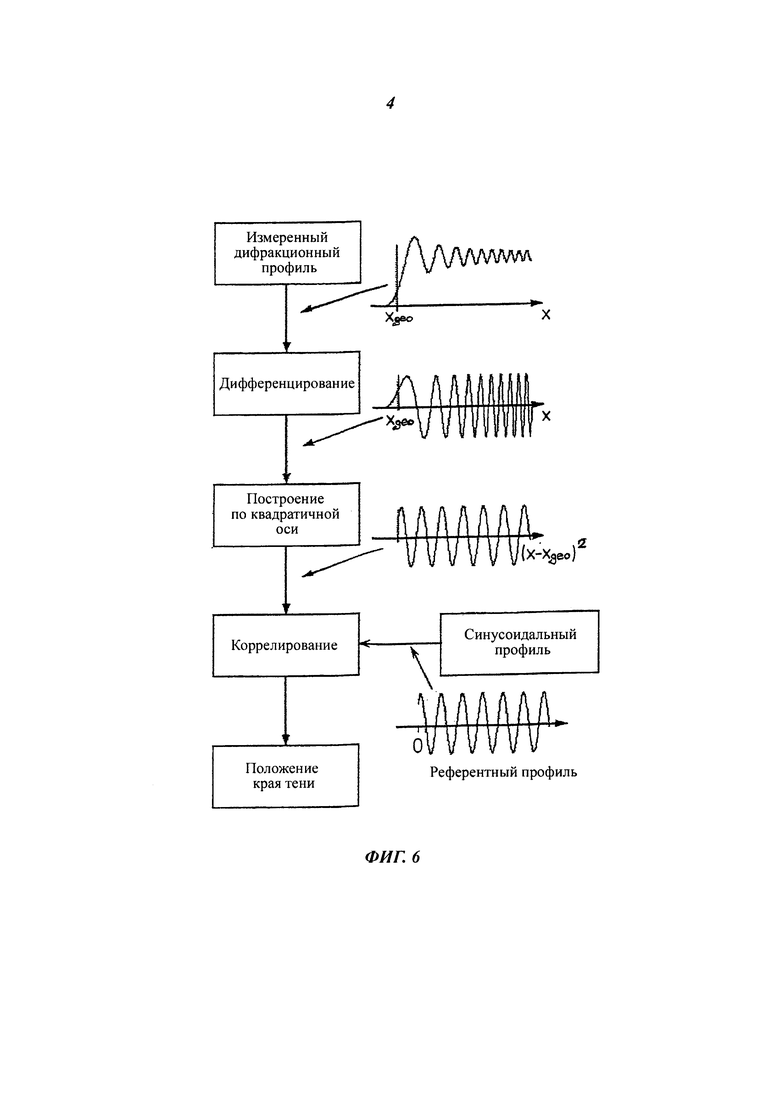
На фиг. 4 схематично иллюстрируется петля фазовой синхронизации согласно изобретению.
На фиг. 5 представлена другая конструкция устройства для осуществления способа по изобретению.
На фиг. 6 представлена блок-схема, иллюстрирующая первый аспект изобретения.
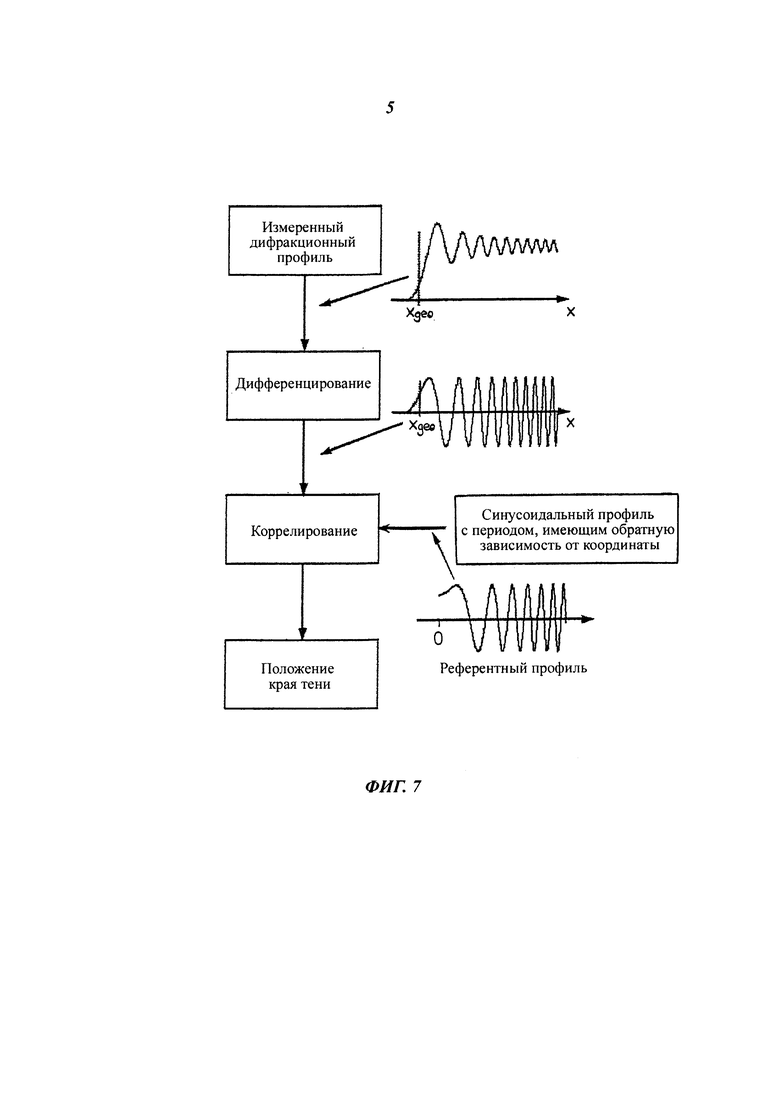
На фиг. 7 представлена блок-схема, иллюстрирующая второй аспект изобретения.
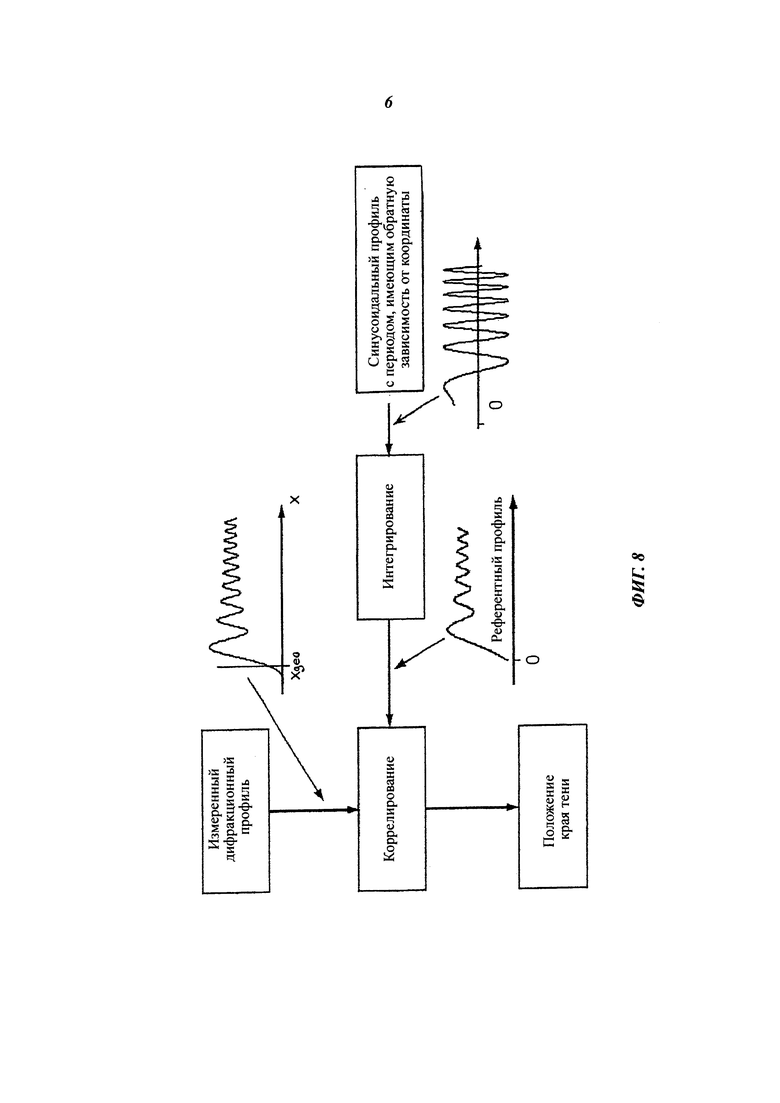
На фиг. 8 представлена блок-схема, иллюстрирующая третий аспект изобретения.
Осуществление изобретения
На чертежах, если не оговорено иное, одинаковые цифровые обозначения относятся к одинаковым объектам. На фиг. 1 показан, в поперечном сечении, шнуровидный объект (далее объект) 10, например кабель, который расположен перпендикулярно плоскости чертежа и который перемещают, например, со скоростью от 10 мм/с до 30 м/с. Устройство для изготовления кабеля и для осуществления его подачи не изображено, поскольку подобные устройства хорошо известны специалистам. Объект 10 может иметь диаметр менее 1 мм, предпочтительно менее 0,5 мм. При этом данный объект может быть прозрачным.
На фиг. 1 слева от объекта 10 можно видеть точечный источник 12 излучения. Им может быть лазерный диод, который генерирует, например, инфракрасное излучение. В плоскости измерений источник 12 излучения представляет собой точечный источник, испускающий веерообразный пучок 14 излучения. В этой плоскости размер активной зоны источника 12 излучения, в частности лазерного диода 12, следует сделать как можно меньшим. В перпендикулярной к ней плоскости, т.е. в плоскости, параллельной продольной оси объекта 10, размер активной зоны источника 12 излучения может быть несколько увеличен, например сделан составляющим 0,5 мм.
На стороне объекта 10, противоположной по отношению к источнику 12 излучения, находится оптический датчик 16, например линейный ПЗС-датчик, продольная ось (ось расположения чувствительных элементов) которого лежит в плоскости изображений и ориентирована перпендикулярно оси пучка источника 12 излучения. Индивидуальные чувствительные элементы 18 датчика 16 предназначены для регистрации лазерного излучения, испускаемого источником 12 излучения. Объект 10, освещаемый веерообразным пучком 14 излучения от источника 12, создает тень на линейном датчике 16, размер которой характеризует диаметр объекта 10. Однако размер тени не равен диаметру объекта 10 вследствие веерообразного расхождения пучка. Поэтому при проведении расчетов необходимо учитывать расстояние от продольной оси объекта 10 до линейного датчика 16, причем измеренная протяженность тени должна умножаться на коэффициент (значение которого меньше 1), рассчитанный по теореме о пропорциональных отрезках (теореме Фалеса). Поскольку псевдоапертура тени варьирует относительно центральной точки поперечного сечения шнуровидного объекта в зависимости от расстояния между источником 12 излучения и объектом 10, эту зависимость также следует учитывать.
Источник 12 излучения, в частности лазерный диод, испускает когерентное монохроматическое излучение. Это излучение испытывает дифракцию на наружных краях объекта 10. В результате на оптическом датчике 16 создается профиль интенсивности, представленный в идеализированном виде на фиг. 2. Ось х, которая на фиг. 2 ориентирована слева направо, на фиг. 1 ориентирована сверху вниз. Профиль геометрической тени, которая создавалась бы объектом 10 в отсутствие дифракции, показан на фиг. 2 штрихпунктирной линией и обозначен, как 20. Положения хgео геометрических краев такого профиля не могут быть измерены непосредственно на оптическом датчике 16 вследствие дифракции. Слева и справа от геометрических краев регистрируются профили интенсивности с медленно затухающими максимумами и минимумами интенсивности, чередующимися друг с другом. Такая дифракционная картина, обусловленная разностями длины хода (интерференцией), рассматривается как граница 22 дифракции (дифракционная кайма). Максимумы, обусловленные сложением индивидуальных пучков излучения, обозначены, как 24, а минимумы, обусловленные взаимным подавлением пучков, обозначены, как 26. Частота, с которой максимумы 24 и минимумы 26 следуют друг за другом, зависит от расстояния между дифрагирующими краями объекта 10 и плоскостью измерений датчика 16. Профиль интенсивности варьирует в пределах дифракционной каймы 22 вокруг центрального уровня 28, который регистрировался в отсутствие измеряемого объекта.
Далее способ анализа согласно изобретению будет подробно описан с использованием графиков, представленных на фиг. 3. На верхнем графике показана дифракционная кайма (граница дифракции) по фиг. 2. Показана зависимость интенсивности I от координаты х, регистрируемая оптическим датчиком 16. В представленном примере оптический датчик 16 содержит измерительную линейку с N=300 пикселей. Центральный график на фиг. 3 представляет первую производную по координате профиля интенсивности, представленного на верхнем графике. Производная рассчитывалась в соответствии с формулой:

Таким образом, центральный график иллюстрирует зависимость производной интенсивности по положению, т.е. по координате х. Данный профиль перестроен на нижнем графике с использованием "квадратичной" оси х, а именно (х-хgео)2. Более конкретно, значения интенсивности, отложенные на верхнем графике по фиг. 3, рассматриваются как значения по оси у, соответствующие определенным значениям х. К этим значениям применена функция d(x-хgeо)2, и результат этой операции представлен на нижнем графике, на котором профиль сигнала является почти синусоидальным.
Такой подход применим только при условии, что уже определена координата xgео края геометрической тени, и нижний график на фиг. 3 построен с использованием значения хgео в качестве начала координат. Если край геометрической тени еще неизвестен, что обычно имеет место, в частности, в начале анализа согласно изобретению, нельзя будет получить в результате синусоидальный профиль, представленный на нижнем графике. Кроме того, частота (период) профиля типа представленного на нижнем графике будет зависеть от положения. В частности, частота будет увеличиваться с увеличением координаты. В общем случае, в рамках анализа согласно изобретению для профиля, который построен аналогично нижнему графику на фиг. 3, но который еще не является синусоидальным, следует варьировать фазовый сдвиг (х-хgeo) до тех пор, пока не будет получен (периодический) синусоидальный профиль. Требуемый фазовый сдвиг соответствует искомому положению xgео края геометрической тени, абсолютное значение которого, однако, в данный момент времени еще неизвестно. Синусоидальный профиль, уже установленный и представленный на фиг. 3, можно поэтому сравнивать с группой синусоидальных референтных профилей, чтобы найти оптимальное соответствие между зарегистрированным профилем интенсивности и синусоидальным референтным профилем. После этого может быть определено абсолютное значение края геометрической тени. В процессе анализа согласно изобретению коррелирование и изменение фазового сдвига (х-хgео) осуществляются параллельно, как это будет пояснено далее. Возможно, частоту необходимо варьировать также для того, чтобы определить расстояние от объекта 10 до оптического датчика 16. Далее будет также показано, что, если частота и фазовый сдвиг профиля интенсивности, приведенного на нижнем графике фиг. 3, известны, из этих данных может быть определен диаметр объекта 10.
Сравнение можно в данном случае провести особенно простым образом, используя петлю фазовой синхронизации (ПФС). Соответствующая схема измерений показана на фиг. 4. Через 30 здесь обозначено множительное устройство, через 32 - фильтр нижних частот. Генератор, управляемый напряжением, обозначен, как 34. Используя петлю фазовой синхронизации, показанную на фиг. 4, можно определить (известным способом) изменение частоты и/или фазовый сдвиг, требуемые для оптимального сравнения зарегистрированного и прошедшего математическую обработку профиля интенсивности и синусоидального референтного профиля. Функционирование петель фазовой синхронизации известно специалистам; поэтому в его подробном объяснении нет необходимости. В целях дальнейшего упрощения анализа можно также перевести сигнал, представленный нижним графиком на фиг. 3, в цифровую форму с приданием ему прямоугольного профиля и подать его в цифровую петлю фазовой синхронизации.
На фиг. 5 представлен еще один вариант устройства для осуществления способа по изобретению. Имеется, в частности, второй когерентный монохроматический точечный источник 12b излучения, например также лазерный диод, который также генерирует веерообразный пучок 14b излучения. На фиг. 5 показано, что ось пучка, испускаемого источником 12b излучения, обозначенная, как 36b, перпендикулярна оси пучка источника 12 излучения, обозначенной, как 36. Второй оптический датчик 16b, например тоже линейный ПЗС-датчик, регистрирует когерентное монохроматическое излучение, испускаемое вторым источником 12b излучения. В этом варианте измерительная ось, заданная продольной осью линейного датчика 16b, ориентирована перпендикулярно оси 36b пучка второго источника 12b излучения. Используя это устройство по изобретению, можно не только измерить диаметр объекта 10 по двум направлениям, но, в дополнение, и расстояние между объектом 10 и линейным датчиком 16 или линейным датчиком 16b, которое в случае движения объекта 10 будет, естественно, испытывать флуктуации. Профили интенсивности в пределах дифракционной каймы на обеих сторонах тени от объекта, отбрасываемой на линейные приемники, почти симметричны. Таким образом, по положениям особых точек профиля, имеющих свои зеркальные отображения в пределах левой или, наоборот, в пределах правой дифракционной каймы, можно определить на приемнике положение центра проекции объекта. Объект 10 расположен на линии, соединяющей это положение и лазерный диод 12. Аналогичная соединяющая линия может быть проведена и для измерительной схемы, использующей источник 12b излучения и развернутой на 90°. Точка пересечения двух этих линий соответствует положению центра объекта 10 в пространстве измерений. Таким образом, расстояние до соответствующего линейного датчика 16 или 16b можно считать известным. Поскольку эти расстояния, как было пояснено выше, непосредственно связаны с периодичностью профиля интенсивности, соответствующего нижнему графику на фиг. 3, при использовании описанной схемы измерения применительно к профилю интенсивности, представленному на нижнем графике по фиг. 3, остается определить только фазовый сдвиг. Это упрощает анализ.
Как легко видеть из чертежей, между источниками излучения 12, 12b и объектом 10 по одну сторону от объекта и между объектом 10 и оптическими датчиками 16, 16b по другую сторону, не присутствует никаких оптических элементов, деформирующих или отклоняющих оптическое излучение, в частности никаких оптических элементов, формирующих изображение. Это дополнительно упрощает схему измерений.
На фиг. 6 представлена блок-схема, иллюстрирующая первый аспект способа по изобретению. Можно видеть, что способ по изобретению начинается с измерения дифракционного профиля, например типа представленного на верхнем графике по фиг. 3. На следующем шаге находят производную профиля по координате (положению) с получением профиля типа показанного на центральном графике по фиг. 3. Затем производят масштабирование по квадратичной координатной оси (х-хgeo)2, причем (как это было пояснено выше) сначала еще не будет получен синусоидальный профиль, показанный на фиг. 6 или на нижнем графике по фиг. 3. В процессе дальнейшего анализа согласно изобретению производят сравнение синусоидального референтного профиля с измеренным дифракционным профилем, преобразованным в результате операции "масштабирование по квадратичной координатной оси". Более конкретно, осуществляют сдвиг измеренного дифракционного профиля до получения оптимального соответствия двух профилей. Как было пояснено выше, на этом этапе производится поиск периодического (синусоидального) референтного профиля, оптимально соответствующего измеренному дифракционному профилю, прошедшему математическую обработку. Одновременно обновляется параметр хgео, использованный при формировании квадратичной оси (в зависимости от того, где именно находится нулевая точка референтного профиля, определенного в процессе коррелирования). Корреляция может быть обеспечена, например, с использованием петли фазовой синхронизации (ПФС). В процессе коррелирования может быть определен имевший место фазовый сдвиг. Как было отмечено выше, этот фазовый сдвиг соответствует искомому положению хgео края геометрической тени.
Блок-схема на фиг. 7 иллюстрирует второй вариант способа согласно изобретению. Можно видеть, что этот вариант также начинается с измерения дифракционного профиля, как это было описано для фиг. 6. Осуществляется также дифференцирование профиля по координате (положению), как это описано применительно к фиг. 6. Однако во втором варианте способа согласно изобретению, иллюстрируемом фиг. 7, теперь проводится коррелирование этой производной измеренного дифракционного профиля с референтным профилем, который в этом случае получают построением синусоидального профиля как функции координаты таким образом, что период этого профиля, по существу, имеет обратную линейную зависимость от координаты. В процессе этой операции коррелирования опять-таки производится поиск референтного профиля, оптимально соответствующего измеренному дифракционному профилю, прошедшему математическую обработку. По результатам этой операции может быть повторно определено и записано в память абсолютное положение xgeo края геометрической тени относительно референтных профилей, найденное ранее, например, эмпирически.
На фиг. 8 представлена блок-схема, иллюстрирующая третий вариант способа согласно изобретению. Этот вариант также начинается с измерения дифракционного профиля (как это было описано со ссылкой на фиг. 6). Однако согласно данному варианту, проиллюстрированному фиг. 8, референтный профиль не подвергается математической обработке типа описанной выше. Вместо этого, осуществляют коррелирование измеренного дифракционного профиля с референтным профилем. Данный референтный профиль получают построением синусоидального профиля таким образом, что его период соответствует обратной линейной зависимости от координаты, а также тем, что такой синусоидальный профиль, имеющий период, связанный с положением обратной линейной зависимостью, интегрируют по координате. В этом варианте, также в процессе коррелирования, производится поиск такого референтного профиля, который оптимально соответствует измеренному дифракционному профилю. По этому профилю и в этот раз находят абсолютное значение положения хgео края геометрической тени, например, эмпирически определенное по отношению к референтному профилю и сохраненное в памяти.
Из рассмотрения фиг. 6-8 должно быть очевидно, что три варианта способа по изобретению основаны на одной и той же идее. Эта идея исходит из того факта, что, выполняя две соответствующие операции (или операции, обратные им), можно, на основе измеренных дифракционных профилей, получить синусоидальные профили (или, соответственно, наоборот). Как это описано выше, реализация этой базовой идеи упрощает и ускоряет выполняемый согласно изобретению анализ дифракционной картины.
Изобретение относится к способу определения положения по меньшей мере одного края объекта, в частности шнуровидного объекта. Данный способ включает следующие операции: освещение объекта излучением по меньшей мере одного когерентного источника излучения с образованием дифракционной каймы (границы дифракции) на обоих краях геометрической тени, отбрасываемой объектом, и регистрацию пространственного профиля интенсивности по меньшей мере одной дифракционной каймы с помощью по меньшей мере одного линейного или полилинейного оптического датчика. Затем осуществляют дифференцирование по меньшей мере одного зарегистрированного профиля интенсивности по координате, совпадающей с осью расположения элементов приемника, и построение графика результирующего профиля по квадратичной координатной оси. Далее осуществляют сравнение по меньшей мере одного зарегистрированного профиля интенсивности, продифференцированного по указанной координате, по меньшей мере с одним периодическим референтным профилем интенсивности и определение, на основе выполненного сравнения, положения по меньшей мере одного края объекта. Техническим результатом является повышение точности анализа дифракционной картины. 3 н. и 20 з.п. ф-лы, 8 ил.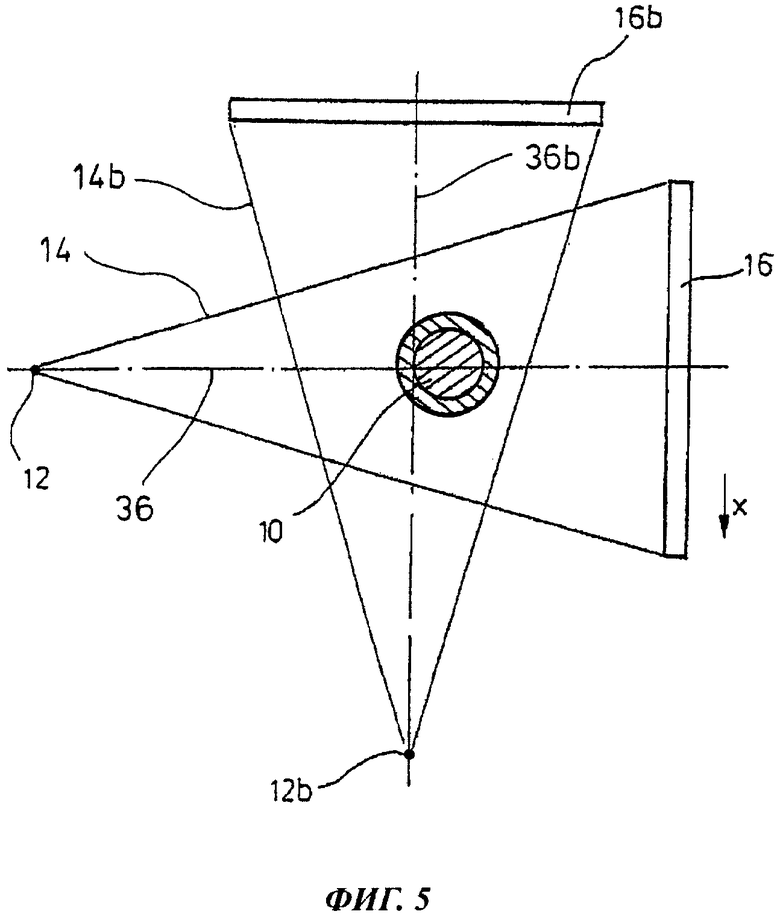
1. Способ определения положения по меньшей мере одного края объекта (10), в частности шнуровидного объекта, включающий следующие операции:
- освещение объекта (10) излучением по меньшей мере одного когерентного источника (12, 12b) излучения с образованием дифракционной (22) каймы на обоих краях геометрической тени, отбрасываемой объектом (10),
- регистрацию пространственного профиля интенсивности по меньшей мере одной дифракционной каймы (22) с помощью по меньшей мере одного линейного или полилинейного оптического датчика (16, 16b),
- дифференцирование по меньшей мере одного зарегистрированного профиля интенсивности по координате, совпадающей с осью расположения элементов приемника, и построение графика результирующего профиля по квадратичной координатной оси,
- сравнение по меньшей мере одного зарегистрированного профиля интенсивности, продифференцированного по указанной координате и построенного по квадратичной координатной оси, по меньшей мере с одним периодическим референтным профилем интенсивности,
- определение, на основе выполненного сравнения, положения по меньшей мере одного края объекта (10).
2. Способ определения положения по меньшей мере одного края объекта (10), в частности шнуровидного объекта, включающий следующие операции:
- освещение объекта (10) излучением по меньшей мере одного когерентного источника (12, 12b) излучения с образованием дифракционной каймы (22) на обоих краях геометрической тени, отбрасываемой объектом (10),
- регистрацию пространственного профиля интенсивности по меньшей мере одной дифракционной каймы (22) с помощью по меньшей мере одного линейного или полилинейного оптического датчика (16, 16b),
- дифференцирование по меньшей мере одного зарегистрированного профиля интенсивности по координате, совпадающей с осью расположения элементов приемника,
- сравнение по меньшей мере одного зарегистрированного профиля интенсивности, продифференцированного по указанной координате, по меньшей мере с одним референтным профилем интенсивности, полученным из периодической функции, период которой имеет, по существу, обратную линейную зависимость от указанной координаты,
- определение, на основе выполненного сравнения, положения по меньшей мере одного края объекта (10).
3. Способ определения положения по меньшей мере одного края объекта (10), в частности шнуровидного объекта, включающий следующие операции:
- освещение объекта (10) излучением по меньшей мере одного когерентного источника (12, 12b) излучения с образованием дифракционной каймы (22) на обоих краях геометрической тени, отбрасываемой объектом (10),
- регистрацию пространственного профиля интенсивности по меньшей мере одной дифракционной каймы (22) с помощью по меньшей мере одного линейного или полилинейного оптического датчика (16, 16b),
- сравнение по меньшей мере одного зарегистрированного профиля интенсивности по меньшей мере с одним периодическим референтным профилем интенсивности, полученным из периодической функции, период которой имеет, по существу, обратную линейную зависимость от указанной координаты, причем указанная функция проинтегрирована по координате,
- определение, на основе выполненного сравнения, положения по меньшей мере одного края объекта (10).
4. Способ по любому из предыдущих пунктов, отличающийся тем, что объект (10) перемещают в направлении, совпадающем с его продольной осью, и, в процессе перемещения, постоянно определяют его положение.
5. Способ по любому из пп. 1-3, отличающийся тем, что по меньшей мере один периодический референтный профиль интенсивности является синусоидальным референтным профилем интенсивности и/или периодическая функция является синусной функцией.
6. Способ по любому из пп. 1-3, отличающийся тем, что по меньшей мере один периодический референтный профиль интенсивности является периодическим прямоугольным, треугольным или трапецеидальным профилем и/или периодическая функция является периодической прямоугольной, треугольной или трапецеидальной функцией.
7. Способ по любому из пп. 1-3, отличающийся тем, что до проведения сравнения с референтным профилем интенсивности генерируют двоичный сигнал, используя ограничение зарегистрированного профиля интенсивности по амплитуде.
8. Способ по любому из п.п. 1-3, отличающийся тем, что в процессе проведения сравнения варьируют параметр по меньшей мере одного зарегистрированного профиля интенсивности и/или по меньшей мере одного референтного профиля, характеризующего соответствующий край геометрической тени, отбрасываемой объектом (10), до достижения наилучшего возможного соответствия профилей интенсивности, сравниваемых друг с другом.
9. Способ по п. 8, отличающийся тем, что варьирование параметра, характеризующего край геометрической тени, отбрасываемой объектом (10), начинают в каждом случае со значения, которое в непосредственно предшествующем варьировании привело к наилучшему возможному соответствию с референтным профилем интенсивности.
10. Способ по любому из пп. 1-3, отличающийся тем, что в процессе проведения сравнения варьируют фазу по меньшей мере одного зарегистрированного профиля интенсивности и/или по меньшей мере одного референтного профиля интенсивности.
11. Способ по любому из пп. 1-3, отличающийся тем, что в процессе проведения сравнения варьируют частоту по меньшей мере одного зарегистрированного профиля интенсивности и/или по меньшей мере одного референтного профиля интенсивности.
12. Способ по любому из пп. 1-3, отличающийся тем, что определяют оба края геометрической тени, отбрасываемой объектом (10).
13. Способ по любому из пп. 1-3, отличающийся тем, что определяют расстояние объекта (10) от по меньшей мере одного оптического датчика (16, 16b).
14. Способ по п. 13, отличающийся тем, что объект (10) освещают посредством по меньшей мере одного второго источника (12b) когерентного излучения, направление (36b) главного пучка которого, по существу, перпендикулярно оси (36) пучка первого когерентного источника (12) излучения, также с образованием дифракционной каймы (22) на обоих краях геометрической тени, отбрасываемой объектом (10), при этом пространственный профиль интенсивности по меньшей мере одной дифракционной каймы (22), образованной при освещении посредством второго источника когерентного излучения, регистрируют с помощью по меньшей мере одного второго линейного или полилинейного оптического датчика (16b) и по результатам регистрации определяют расстояние объекта (10) от первого оптического датчика (16).
15. Способ по любому из пп. 1-3, отличающийся тем, что сравнение производят с использованием петли фазовой синхронизации (ПФС).
16. Способ по любому из пп. 1-3, отличающийся тем, что сравнение производят посредством анализа Фурье.
17. Способ по любому из пп. 1-3, отличающийся тем, что направление (36, 36b) главного пучка по меньшей мере одного когерентного источника (12, 12b) излучения, по существу, перпендикулярно продольной оси объекта (10).
18. Способ по любому из пп. 1-3, отличающийся тем, что по меньшей мере один когерентный источник (12, 12b) излучения является, по существу, точечным и/или что объект (10) освещают, используя веерообразный световой пучок (14, 14b).
19. Способ по п. 18, отличающийся тем, что между по меньшей мере одним когерентным источником (12, 12b) излучения и объектом (10) и/или между объектом (10) и по меньшей мере одним оптическим датчиком (16, 16b) отсутствуют оптические элементы, деформирующие или отклоняющие световое излучение.
20. Способ по любому из пп. 1-3, отличающийся тем, что по меньшей мере один оптический датчик (16, 16b) устанавливают напротив по меньшей мере одного когерентного источника (12, 12b) излучения.
21. Способ по любому из пп. 1-3, отличающийся тем, что измерительная ось по меньшей мере одного оптического датчика (16, 16b), по существу, перпендикулярна (36, 36b) оси пучка по меньшей мере одного когерентного источника (12, 12b) излучения.
22. Способ по любому из пп. 1-3, отличающийся тем, что объект (10) является по меньшей мере частично прозрачным.
23. Способ по любому из пп. 1-3, отличающийся тем, что объект (10) имеет диаметр менее 1 мм, предпочтительно менее 0,5 мм.
| US20020044289 A1 18.04.2002 | |||
| US2005117162 A1 02.06.2005 | |||
| JP2005224901 A 25.08.2005 | |||
| СПОСОБ ОПТИЧЕСКОГО ИЗМЕРЕНИЯ ПОПЕРЕЧНОГО РАЗМЕРА МЕТАЛЛУРГИЧЕСКОГО ПРОКАТА | 1995 |
|
RU2104479C1 |

