Предлагаемое изобретение относится к области лазерной локации, физической оптике и может быть использовано в системах пассивной локации для определения местоположения светящихся объектов в различных диапазонах электромагнитных волн.
Известно устройство [1, 2] для лазерной локации, содержащее источник электромагнитного излучения с передающей оптической системой, оптико-электронное приемное устройство с устройством обработки первичных данных, систему автоматического и ручного нацеливания. Устройство обладает следующими недостатками:
- работа локатора в активном и полуактивном режимах работы;
- менее точное нахождение цели ввиду двукратного прохождения трассы импульсным сигналом (в пассивной локации оптический сигнал проходит три раза);
- существование возможности пропуска сигнала при двукратном прохождении.
Известно устройство - лазерная система видения [3], содержащее источник излучения, сканирующее устройство, приемный оптический элемент (линза), фотодетектор (ФЭУ), усилитель, индикатор, синхронизатор. Устройство работает следующим образом: сканирующее устройство осуществляет обработку поверхности исследуемого объекта. Оптический элемент фокусирует отраженный сигнал на поверхности чувствительного элемента ФЭУ. Усиленный сигнал подается на индикатор.
Устройство обладает следующими недостатками:
- используется источник подсвета, вследствие малой расходимости пучка необходимы значительные времена обзора;
- наличие помехи обратного рассеивания;
- продолжительное время использования системы грубого поиска.
Известно устройство, которое реализует метод, использующий вспомогательное излучение для получения изображения цели [4]. Устройство, реализующее этот метод, содержит точечный отражатель, расположенный вблизи объекта - цели (метод Гудвина), а на приемной апертуре регистрируется голограмма, где в качестве опорного сигнала используется излучение от точечного источника.
Устройство обладает следующими недостатками:
- использование фоточувствительных материалов (фотопленка), что ограничивает спектральную область использования оптических локаторов;
- трудность использования метода, если в устройстве расстояние между объектом и точечным источником мало, тогда на фоне функции корреляции невозможно различить изображение объекта;
- при больших расстояниях между объектом и точечным источником сказывается разность путей через турбулентную атмосферу.
Известен способ и устройство [5]. Часть устройства выбрано за прототип - оно является оптическим локационным каналом, излучение которого распространяется внутри канала, создаваемого излучением другого спектрального диапазона посредством нагрева атмосферы.
Оптический локационный канал использует эхо-сигнал от объекта и, с помощью системы обращения волнового фронта, многократно воздействует на объект. Оптический канал содержит систему нацеливания в виде волноводного канала с длиной волны λ0, отличной от оптической длины волны λ1 (λ0>λ1), эхо-сигналы, отраженные от объекта, систему ослабления в виде среды, в которой распространяется излучение с длиной волны λ1, регистраторы (ФЭУ), выходное устройство обработки, состоящее из кюветы ОВФ, усилителя вынужденного рассеивания, квантового усилителя.
Функционирование устройства затруднено вследствие:
- сложности создания системы нацеливания, использующей излучение другого спектрального состава;
- наличие аппаратуры поиска для первичного обнаружения цели;
- получение фонового излучения от внешних шумов, определяемых сторонними природными источниками (солнце, переотражение от поверхности земли и т.д.).
В соответствии с предлагаемым изобретением, технический результат достигается благодаря использованию системы нацеливания в виде светонепроницаемой оболочки с передней стенкой (экраном) с квадратным отверстием (D×D) и размещенным соосно с ним на расстоянии L(L>h) уголковым отражателем в форме четырехгранной правильной пирамиды с гранями-пластинами с основаниями длиной l0(l0>D) и скосом у основания под углом

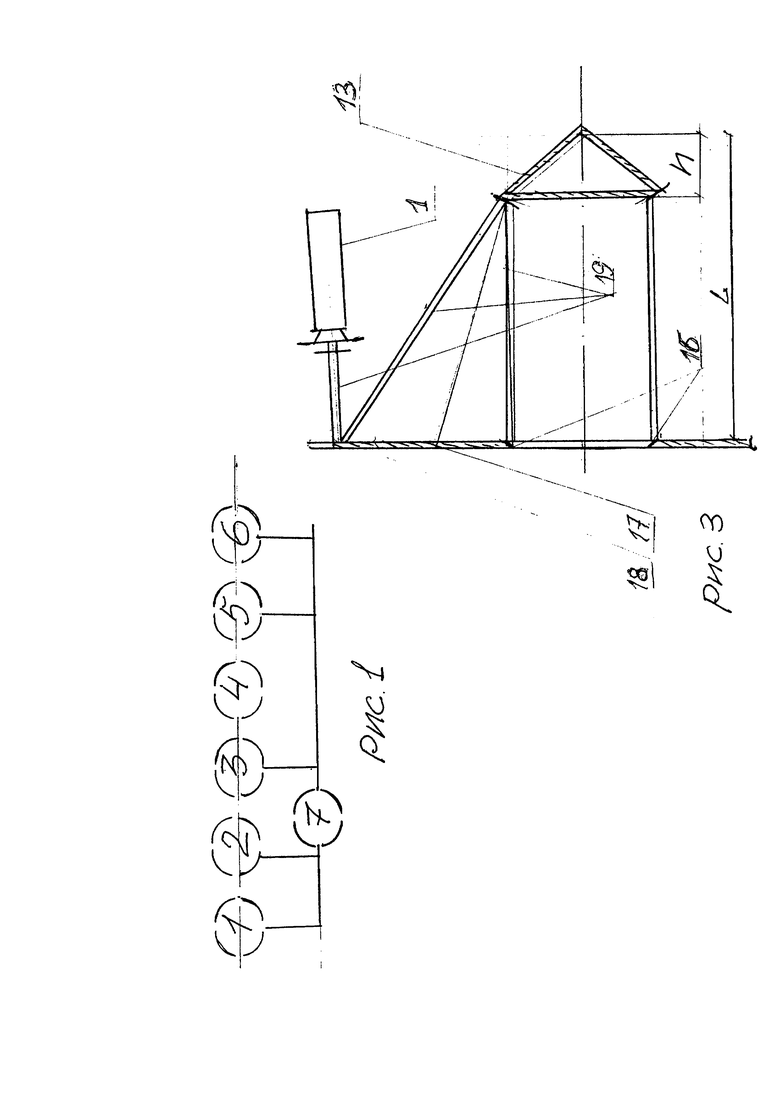
Система ослабления, выполненная в виде совокупности краев отверстия экрана и его внутренней диффузно-отражающей поверхности и регистратора, состоящего из двух каналов, содержащих по два фотоприемника со сменным комплектом оптических фильтров и собирающей линзы, установленных перед ними, причем фотоприемники размещены в области геометрической тени краев отверстия экрана попарно симметрично на вертикальной и горизонтальной осях, параллельных плоскости экрана на расстоянии li(li>D) друг от друга соосно с индикатрисой рассеивания внутренней поверхности экрана. Применение предлагаемого устройства позволяет осуществить пассивную оптическую локацию, обеспечивающую, в данном случае, экономию технико-экономических ресурсов, улучшить качество принимаемых сигналов, увеличив соотношение сигнал - шум, что может позволить увеличить дальность при обнаружении различных объектов, имеющих зеркально-бликовый характер отражения. На рис. 1 показана блок-схема выходного устройства обработки, содержащая фотоэлектрический сигнал 2 с фотоприемника 1, широкополосный усилитель 3, выходной сигнал 4, быстродействующий счетчик 5, измеритель временных интервалов 6. Счетчик 5 совместно с измерителем обеспечивают также автономность регистрации сигналов с одного из фотоприемников каждого канала. Эти сигналы необходимы при определении расстояния до источника излучения методом пассивной локации. Для синхронизации работы электронных средств устройств используется система синхронизации 7. Аналогичное соотношение справедливо для всех прямолинейных краев 8 отверстия 9.
Диафрагма системы нацеливания вырезает из диаметра пришедшего пучка уровень мощности с незначительным порогом, поэтому, даже если пучок имеет в среднем значительную интенсивность, его края будут мало подвержены различным воздействиям, вследствие прохождения в атмосферном канале, поэтому пучок можно считать осесимметричным каналом по малому порогу, что и позволяет использовать устройство по предлагаемому назначению.
Таким образом, при установке фотоприемников, например, в горизонтальном канале 10 при w1=w2, после устройства обработки, получим два одинаковых временных пика, сравнение амплитуд которых позволяет судить о симметрии установки диафрагмы по отношению к оси пучка.
Аналогичная картина будет наблюдаться и для вертикального канала 11. Следовательно, перемещая систему нацеливания (ручным или автоматическим способом) вертикально или горизонтально относительно неподвижной системы координат, получим пару пространственных координат (х,y).
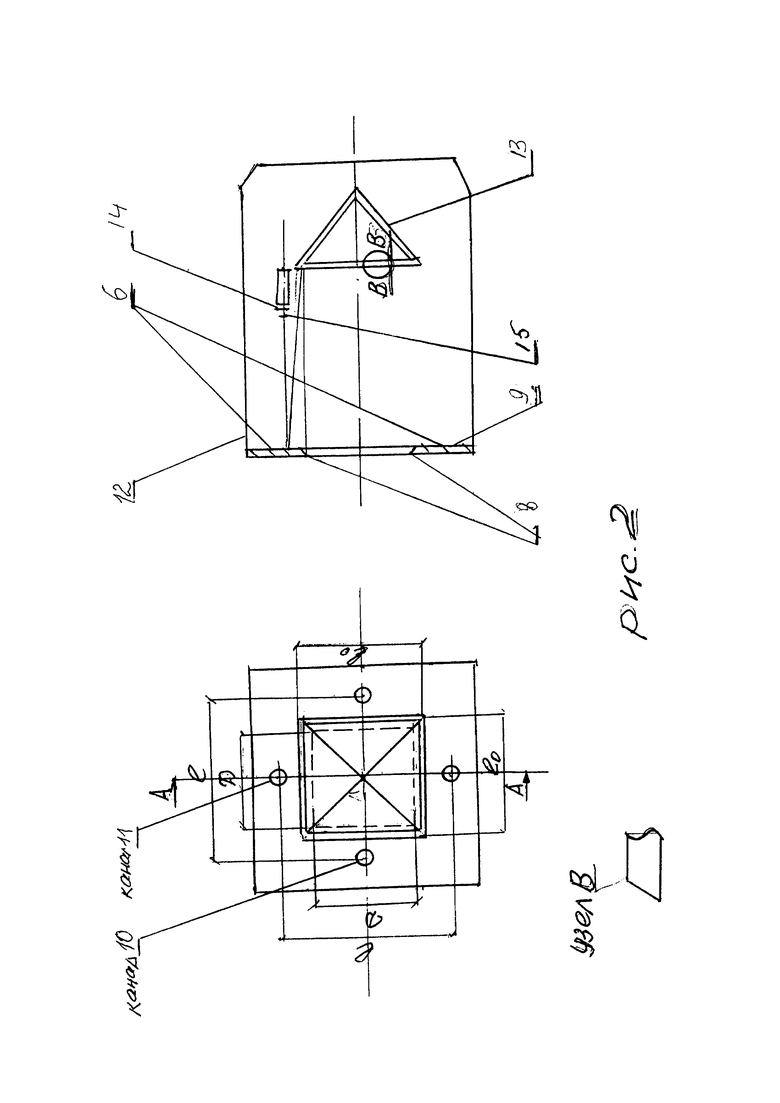
Для определенности рассмотрим работу устройства при регистрации излучения когерентных импульсных излучателей. При этом фотодетекторы работают в режиме счета фотоэлектронов, количество которых определяется слабым сигналом (вследствие функционирования системы ослабления), при этом возможен режим работы, при котором существует вероятность ложной тревоги, то есть вероятность шумового выброса, превышающего порог обнаружения, и происходит ложное срабатывание устройства. Для предотвращения ложного срабатывания необходимо увеличить уровень полезного сигнала над шумовым. Оптическая часть устройства представлена на рис. 2. Система нацеливания имеет светонепроницаемую оболочку 12 с передней стенкой (экраном) с квадратным отверстием 9, которое ограничивает пучок электромагнитного излучения по определенному порогу, 13 - уголковый отражатель, 14 - диафрагма, 15 - линза. Вследствие дифракции и в соответствии с выражением [6], интенсивность пучка в дифракционной зоне выражается формулой

где J0 - интенсивность падающего излучения;
w - геометрический фактор дифракции.
Третья пространственная координата определяется благодаря использованию уголкового отражателя 13, выполненного в виде правильной четырехгранной пирамиды, установленной симметрично диафрагме, причем грани-пластины пирамиды имеют скос под углом α (узел В, рис. 2)

где h - высота пирамиды;
L - расстояние от плоскости экрана до вершины пирамиды;
li - текущее фиксированное расстояние между двумя фотоприемниками каждого из каналов (выбор li определяется расстоянием при котором осуществляется надежная регистрация оптического сигнала);
l0 - длина основания пирамиды уголкового отражателя.
На рис. 3 показан фрагмент характерных угловых и линейных соотношений в системе нацеливания,
где 16 - край отверстия в экране;
17 - нормаль к скосу;
18 - нормаль к поверхности экрана;
19 - падающие и отраженные лучи.
Наличие скоса позволяет увеличить интенсивность, приходящую на фотоприемники излучения, благодаря перераспределению интенсивности в «светлой области» (превышение над средним по полю в 1.37 раза - это первой максимум в дифракционной картине [6]), что увеличивает вероятность правильного обнаружения в соответствии с формулой
Ввиду того, что устройство работает в пассивном режиме, то третья пространственная компонента может быть вычислена по формуле
где τi - момент времени, когда сигналы с фотоприемников (при wi=const, i=1, 2, 3, 4) будут иметь одинаковые амплитуды;
τ2 - время запаздывания от зеркального блика источника когерентного излучения;
с - скорость света.
Таким образом, совокупность предлагаемых признаков, отличных от признаков прототипа, позволяет осуществить более надежную регистрацию и, как следствие, увеличить дальность пассивной локации.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА ЭЛЕКТРОМАГНИТНОГО ИЗЛУЧЕНИЯ | 2016 |
|
RU2650856C2 |
| СПОСОБ ЛАЗЕРНОЙ ЛОКАЦИИ ЗАДАННОЙ ОБЛАСТИ ПРОСТРАНСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2375724C1 |
| ЛАЗЕРНАЯ ЛОКАЦИОННАЯ СИСТЕМА | 2013 |
|
RU2544305C1 |
| Устройство для измерения перемещений | 1982 |
|
SU1146547A1 |
| СПОСОБ ПРОТИВОДЕЙСТВИЯ ЛАЗЕРНЫМ КОГЕРЕНТНЫМ ЛОКАТОРАМ | 2011 |
|
RU2456536C1 |
| СПОСОБ РЕГИСТРАЦИИ ПОЛОЖЕНИЯ ФРОНТА КРИСТАЛЛИЗАЦИИ В УСТАНОВКАХ ГОРИЗОНТАЛЬНОЙ НАПРАВЛЕННОЙ КРИСТАЛЛИЗАЦИИ И УСТРОЙСТВО РЕГИСТРАЦИИ ПОЛОЖЕНИЯ ФРОНТА КРИСТАЛЛИЗАЦИИ В УСТАНОВКАХ ГОРИЗОНТАЛЬНОЙ НАПРАВЛЕННОЙ КРИСТАЛЛИЗАЦИИ | 2005 |
|
RU2289641C1 |
| СПОСОБ СКРЫТИЯ ОПТИКО-ЭЛЕКТРОННЫХ СРЕДСТВ ОТ ЛАЗЕРНЫХ ЛОКАЦИОННЫХ СИСТЕМ | 2020 |
|
RU2748459C1 |
| КОМПЛЕКС ЛАЗЕРНОЙ ЛОКАЦИИ | 2013 |
|
RU2529758C1 |
| ОПТИКО-ЭЛЕКТРОННОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ РАЗМЕРОВ ОБЕЧАЕК | 1991 |
|
RU2044269C1 |
| ПРИЕМОПЕРЕДАЮЩЕЕ УСТРОЙСТВО ЛАЗЕРНОГО ЛОКАТОРА | 1986 |
|
RU2048686C1 |
Изобретение относится к области лазерной локации, физической оптике и может быть использовано в системах пассивной локации для определения местоположения светящихся объектов в различных диапазонах электромагнитных волн. Заявленное устройство обнаружения светящихся объектов содержит систему нацеливания и ослабления, регистратор, выходное устройство обработки. Причем система нацеливания выполнена в форме светонепроницаемой оболочки, выполненной в виде экрана с квадратным отверстием (D×D) и размещенным соосно с экраном на расстоянии L(L>h) уголковым отражателем в форме четырехгранной правильной пирамиды с гранями-пластинами с основаниями длиной l0(l0>D) и скосом у основания под углом, а система ослабления выполнена в виде совокупности краев отверстия экрана и его внутренней диффузно отражающей поверхности. Регистратор состоит из двух каналов, содержащих по два фотоприемника со сменным комплектом оптических фильтров и собирающей линзой, установленной перед ними, причем фотоприемники, передающие фотоэлектрические сигналы на выход устройства обработки, размещены в области геометрической тени попарно симметрично на вертикальной и горизонтальной осях, параллельных плоскости экрана, на расстоянии li(li>D) друг от друга. Технический результат - осуществление пассивной оптической локации, улучшение качества принимаемых сигналов за счет увеличения соотношения сигнал - шум, что позволяет увеличить дальность при обнаружении различных объектов, имеющих зеркально-бликовый характер отражения. 3 ил.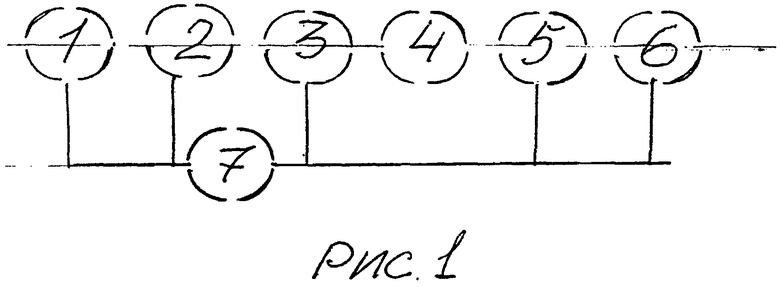
Устройство обнаружения светящихся объектов, содержащее систему нацеливания и ослабления, регистратор, выходное устройство обработки, отличающееся тем, что система нацеливания выполнена в форме светонепроницаемой оболочки, выполненной в виде экрана с квадратным отверстием (D×D) и размещенным соосно с экраном на расстоянии L(L>h) уголковым отражателем в форме четырехгранной правильной пирамиды с гранями-пластинами с основаниями длиной l0(l0>D) и скосом у основания под углом
а система ослабления выполнена в виде совокупности краев отверстия экрана и его внутренней диффузно отражающей поверхности, а регистратор состоит из двух каналов, содержащих по два фотоприемника со сменным комплектом оптических фильтров и собирающей линзой, установленной перед ними, причем фотоприемники, передающие фотоэлектрические сигналы на выход устройства обработки, размещены в области геометрической тени попарно симметрично на вертикальной и горизонтальной осях, параллельных плоскости экрана, на расстоянии li(li>D) друг от друга,
где li - текущее фиксированное расстояние между двумя фотоприемниками каждого из каналов.
| СПОСОБ НАВЕДЕНИЯ НА УДАЛЕННЫЙ ОБЪЕКТ ИМПУЛЬСНОГО ЭЛЕКТРОМАГНИТНОГО ИЗЛУЧЕНИЯ | 2014 |
|
RU2589763C2 |
| JPH 10104355 A, 24.04.1998 | |||
| RU 2011126418 A, 27.06.2011 | |||
| СПОСОБ ПОИСКА МАЛОЗАМЕТНЫХ ПОДВИЖНЫХ ОБЪЕКТОВ | 2013 |
|
RU2528391C1 |
| US 20160266246 A1, 15.09.2016. | |||

