Изобретение относится к области изготовления устройств точного позиционирования на основе пьезоэлектрических и пьезомагнитных (магнитострикционных) актюаторов, характеризующихся широким интервалом рабочих значений деформаций и перемещений исполнительных элементов, в частности, в авиации для управления геометрией аэродинамических профилей лопастей вертолетов.
Известен векторный пьезоэлектрический вибропреобразователь, содержащий корпус с закрепленным в нем пьезоэлементом, выполненным в виде прямоугольного параллелепипеда с квадратным основанием и с электропроводящими поверхностями (электродами), закрепленными на его гранях и электрически изолированными друг от друга (патент RU №2347228 от 20.02.2009 г.).
Недостатком известного устройства является малый рабочий диапазон управляемых статичных перемещений исполнительных элементов устройства.
Наиболее близкой конструкцией того же назначения к заявленному изобретению по совокупности признаков является линейный привод, содержащий корпус, пьезоэлемент внутри корпуса, электроды (два или более) для управления пьезоэлементом (патент RU №2373611 от 20.11.2009 г.). Устройство обеспечивает уменьшение габаритных размеров линейного привода в осевом направлении, увеличение амплитуды его перемещений при сохранении осевого габаритного размера. Данное устройство принято за прототип.
Признаки прототипа, совпадающие с существенными признаками 1 варианта заявляемого изобретения, - корпус; пьезоэлемент, расположенный внутри корпуса; управляющие электроды.
Недостатком известной конструкции, принятой за прототип, является малый рабочий диапазон управляемых статичных перемещений исполнительных элементов устройства.
Задачей изобретения является увеличение рабочего диапазона управляемых статичных перемещений исполнительных элементов устройства при уменьшении его габаритных размеров.
Технический результат изобретения заключается в способности трансформировать большие вибрационные резонансные колебания пьезоэлемента в статичные перемещения исполнительных элементов (рабочих участков внешней поверхности корпуса) устройства пьезоактюатора.
Указанный технический результат достигается тем, что в известном устройстве, содержащем корпус, пьезоэлемент, расположенный внутри корпуса, управляющие электроды, согласно изобретению геометрическая форма внутренней поверхности корпуса совпадает с геометрической формой пьезоэлемента, управляющие электроды предназначены для возбуждения резонансных электромеханических колебаний пьезоэлемента, при этом между пьезоэлементом и внутренней поверхностью корпуса выполнен малый зазор, размер которого не превышает максимальную величину (амплитуду) вибрационных смещений точек на рабочих «ударных» участках (контактирующих с рабочими участками внутренней поверхности корпуса посредством ударных воздействий) поверхности пьезоэлемента при его вынужденных резонансных электромеханических колебаниях.
Управляющие электроды расположены внутри или вне корпуса устройства (пьезоактюатора), в частности, электроды могут быть расположены на внешней поверхности корпуса пьезоактюатора.
Пьезоэлемент может быть выполнен со слоистой «пакетной» структурой из чередующихся между собой пьезоэлектрических слоев и управляющих электродов.
Признаки 1 варианта заявляемого технического решения, отличительные от прототипа, - геометрическая форма внутренней поверхности корпуса совпадает с геометрической формой пьезоэлемента; управляющие электроды предназначены для возбуждения резонансных электромеханических колебаний пьезоэлемента внутри корпуса; между пьезоэлементом и внутренней поверхностью корпуса выполнен малый зазор, размер которого не превышает максимальную величину (амплитуду) вибрационных смещений точек на рабочих «ударных» участках (контактирующих с рабочими участками внутренней поверхности корпуса посредством ударных воздействий) поверхности пьезоэлемента при его вынужденных резонансных электромеханических колебаниях; пьезоэлемент выполнен со слоистой «пакетной» структурой из чередующихся между собой пьезоэлектрических слоев и управляющих электродов.
Указанный технический результат также достигается тем, что устройство (пьезоактюатор) выполнено составным, состоящем из заявляемых однотипных пьезоактюаторов (вариант 1), размещенных в непрерывном упругом связующем.
Кроме того, в составном устройстве (пьезоактюаторе) управляющие эквипотенциальные электроды различных однотипных пьезоактюаторов объединены в соответствующие общие управляющие электроды.
Кроме того, в составном устройстве (пьезоактюаторе) корпуса и направления поляризаций пьезоэлементов в различных корпусах имеют единую пространственную ориентацию.
Кроме того, в составном устройстве (пьезоактюаторе) однотипные корпуса, в частности, призматической или цилиндрической формы соединены между собой (боковыми поверхностями) связующим и, в результате, составное устройство (пьезоактюатор) представляет собой «составной слой», при этом верхние и нижние основания корпусов расположены на плоскостях составного слоя, направления поляризаций пьезоэлементов во всех корпусах имеют единую ориентацию вдоль нормали
к плоскости «составного слоя» и управляющие эквипотенциальные электроды различных однотипных пьезоактюаторов объединены в соответствующие общие управляющие электроды, расположенные на противоположных границах «составного слоя».
Кроме того, в составном устройстве (пьезоактюаторе) корпуса имеют, в частности, малые относительные (микроскопические) размеры, сферическую форму и расположены в связующем хаотично, при этом одинаковые направления поляризаций пьезоэлементов в различных корпусах обуславливаются поляризацией (в частности, с использованием общих управляющих электродов пьезоактюатора) всех пьезоэлементов после распределения корпусов с пьезоэлементами в связующем и последующей полимеризации связующего.
Кроме того, в составном устройстве (пьезоактюаторе) связующее и корпуса различных однотипных пьезоактюаторов (вариант 1) объединены и представляют общий многосвязный корпус составного пьезоактюатора, при этом общие управляющие электроды расположены на противоположных сторонах внешней рабочей поверхности общего корпуса составного пьезоактюатора.
Признаки 2 варианта заявляемого технического решения, отличительные от прототипа, - устройство (пьезоактюатор) выполнено составным, состоящим из заявляемых однотипных пьезоактюаторов (вариант 1), размещенных в непрерывном упругом связующем; управляющие эквипотенциальные электроды различных однотипных пьезоактюаторов объединены в соответствующие общие управляющие электроды; направления поляризаций пьезоэлементов в различных корпусах имеют единую пространственную ориентацию; однотипные корпуса, в частности, призматической или цилиндрической формы соединены между собой (боковыми поверхностями) связующим и, в результате, составное устройство (пьезоактюатор) представляет собой «составной слой», при этом верхние и нижние основания корпусов расположены на плоскостях составного слоя;
направления поляризаций пьезоэлементов во всех корпусах имеют единую ориентацию вдоль нормали к плоскости «составного слоя» и управляющие эквипотенциальные электроды различных однотипных пьезоактюаторов объединены в соответствующие общие управляющие электроды, расположенные на противоположных границах «составного слоя»; корпуса имеют, микроскопические размеры, сферическую форму и расположены в связующем хаотично; связующее и корпуса различных однотипных пьезоактюаторов (вариант 1) объединены и представляют общий многосвязный корпус составного пьезоактюатора, при этом общие электроды расположены на противоположных сторонах внешней рабочей поверхности составного пьезоактюатора.
Отличительные признаки, в совокупности с известными, обеспечат трансформацию больших (относительно статического случая) высокочастотных вибрационных резонансных колебаний пьезоэлемента в статичные перемещения исполнительных элементов (рабочих участков внешней поверхности корпуса) устройства (пьезоактюатора), тем самым позволят увеличить рабочий диапазон управляемых статичных перемещений исполнительных элементов устройства при уменьшении его габаритных размеров.
Пьезоактюатор иллюстрируется чертежами, представленными на фиг. 1 - фиг. 4.
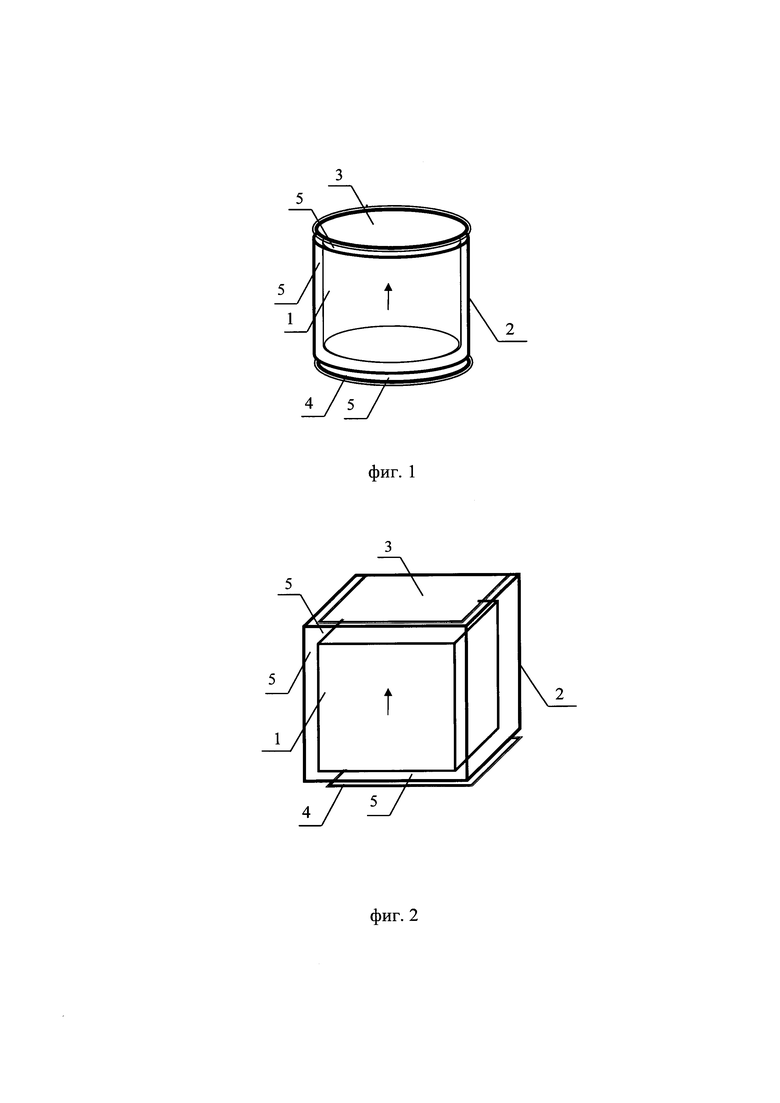
На фиг. 1 изображен пьезоактюатор цилиндрической формы.
На фиг. 2 изображен пьезоактюатор призматической формы.
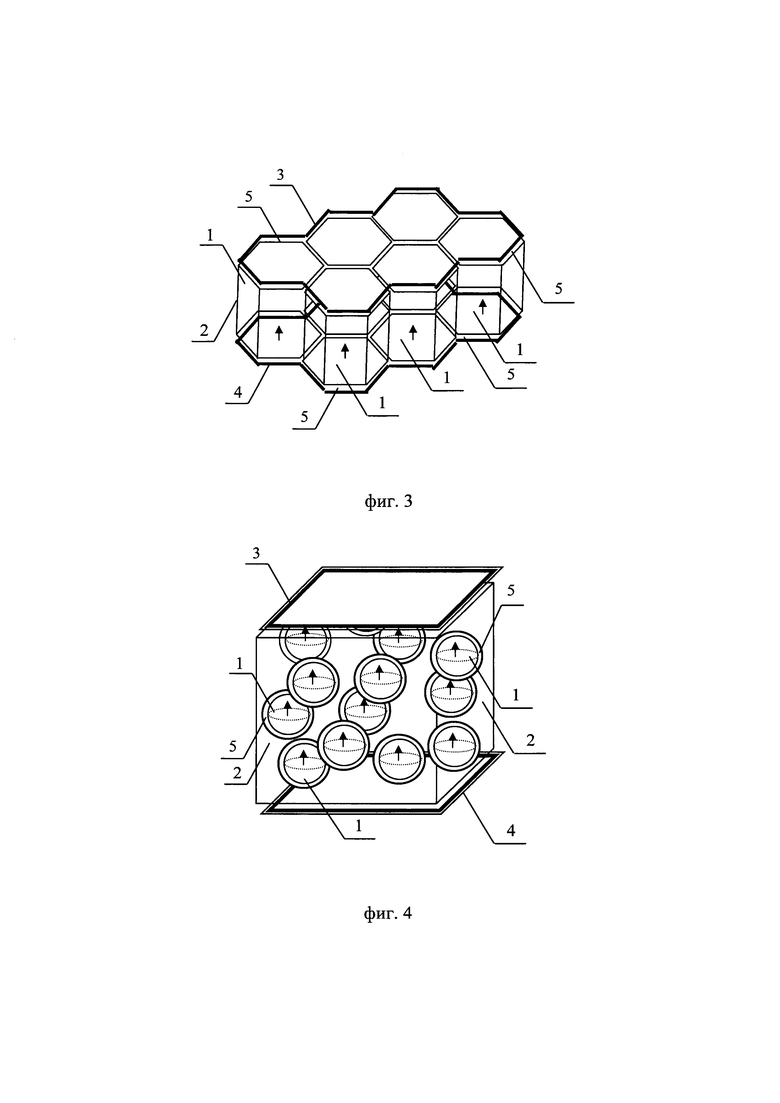
На фиг. 3 изображен составной пьезоактюатор типа «составной слой».
На фиг. 4 изображен составной пьезоактюатор типа «гранулированный композит».
На фиг. 1 - фиг. 4 стрелками обозначены направления поляризаций пьезоэлементов 1.
В первом варианте исполнения (фиг. 1-2) пьезоактюатор содержит пьезоэлемент 1, расположенный внутри корпуса 2, управляющие электроды 3
и 4, расположенные внутри или вне корпуса пьезоактюатора. В частности, электроды 3, 4 могут быть расположены на внешней поверхности корпуса 2 пьезоактюатора.
Геометрическая форма внутренней поверхности корпуса 2 совпадает с геометрической формой пьезоэлемента 1. Управляющие электроды 3, 4 предназначены для возбуждения резонансных электромеханических колебаний пьезоэлемента 1 внутри корпуса 2. Между пьезоэлементом 1 и внутренней поверхностью корпуса 2 имеется малый зазор, размер которого не превышает максимальную величину (амплитуду) вибрационных смещений точек на рабочих «ударных» участках (контактирующих с рабочими участками внутренней поверхности корпуса 2 посредством ударных воздействий) поверхности пьезоэлемента 1 при его вынужденных резонансных электромеханических колебаниях, что обеспечит реализацию периодического ударного механического воздействия пьезоэлемента 1 на рабочие участки внутренней поверхности корпуса 2.
Исполнительными элементами пьезоактюатора являются рабочие участки внешней поверхности корпуса 2.
Пьезоэлемент 1 может быть выполнен со слоистой «пакетной» структурой из чередующихся между собой пьезоэлектрических слоев и управляющих электродов.
Корпус 2 может быть как однородным, так и составным кусочно-однородным по электромеханическим и инерционным свойствам.
К корпусу 2 могут быть присоединены дополнительные инерционные элементы, в частности, пластины для увеличения инерционных свойств рабочих фрагментов корпуса (на фиг. 1-4 не показаны).
Во втором варианте исполнения пьезоактюатор выполнен составным (фиг. 3-4), включающим однотипные пьезоактюаторы, раскрытые в 1 варианте исполнения, с корпусами 2, размещенными в непрерывном упругом связующем (на фиг. 3-4 не показано) и закрепленными в нем адгезионными связями на межфазных поверхностях границ корпус/связующее, при этом
имеем единую ориентацию направлений поляризаций пьезоэлементов 1 и общие управляющие электроды 3, 4 расположены на внешней поверхности составного пьезоактюатора.
В составном пьезоактюаторе типа «составной слой» (фиг. 3) верхние и нижние основания правильных призматических гексагональных корпусов 2 расположены соответственно на верхней и нижней границах «составного слоя», при этом пьезоэлементы 1 в корпусах 2 имеют единую ориентацию поляризаций вдоль нормали к плоскости «составного слоя» и общие управляющие электроды 3, 4 расположены на противоположных границах «составного слоя».
В составном пьезоактюаторе типа «гранулированный композит» (фиг. 4) сферические пьезоэлементы 1 хаотично распределены в многосвязном общем корпусе 2 с общими (верхним и нижним) управляющими электродами на противолежащих гранях объема составного пьезоактюатора, при этом все пьезоэлементы имеют одинаковые направления поляризаций и имеют, в частности, микроскопические размеры.
Для составных пьезоактюаторов направления поляризаций различных пьезоэлементов 1 могут быть как упорядоченными вдоль одной (в частности, для случая одноосного линейного пьезоактюатора перемещений) (фиг. 3, 4) или нескольких (в частности, двух или трех взаимоортогональных направлений) пространственных осей, в частности, вдоль одной оси (оси напряженности электрического поля между электродами), так и неупорядоченными (без преобладающих ориентаций в пространстве).
В составном пьезоактюаторе пьезоэлементы 1 могут быть поляризованы как до, так и после (для реализации случая сонаправленных поляризаций всех пьезоэлементов в объеме составного пьезоактюатора) размещения и фиксирования их корпусов в связующем или непосредственно в общем многосвязном корпусе 2 (фиг. 4).
В составном пьезоактюаторе резонансные частоты могут быть как одинаковыми для всех пьезоэлементов 1, так и иметь дискретный или
непрерывный спектр резонансных частот, в частности, с целью осуществления перемещений исполнительных элементов пьезоактюатора вдоль различных пространственных осей посредством варьирования частотой переменного электрического поля на общих электродах пьезоактюатора.
Размещение пьезоэлемента в корпусе или пьезоэлементов, в частности, сферической формы в общем многосвязном корпусе с малым (микроскопическим) зазором между поверхностью пьезоэлемента и соответствующей внутренней поверхностью корпуса может быть осуществлено посредством выбора соответствующих материалов для пьезоэлемента и корпуса с требованием отсутствия у них взаимной адгезии при формовании системы «пьезоэлемент/корпус» или «пьезоэлементы/общий многосвязный корпус», в частности, один из элементов этой системы может быть изготовлен из поливинилиденфторида PVDF, который является фторопластом (фторсодержащим полимером) и у которого адгезия ко многим материалам, в частности, керамике и полимерам практически равна нулю (см. стр. 135 в монографии Полимерные пленочные материалы / В.Е. Гуль, П.В. Козлов, Д.Ф. Каган и др.; Под ред. В.Е. Гуля. - Москва: Химия, 1976. - 247 с.). Таким образом, в системе «пьезоэлемент/корпус» или «пьезоэлементы/общий многосвязный корпус» пьезоэлемент (или пьезоэлементы) может быть изготовлен из поляризованного пьезоэлектрического полимера PVDF, а корпус (или общий многосвязный корпус) - из другого (неполяризованного) полимера, или пьезоэлемент (или пьезоэлементы) может быть изготовлен из поляризованной керамики, например, цирконат-титанат свинца ЦТС, а корпус (или общий многосвязный корпус) - из неполяризованного фторопласта, в частности, PVDF.
Пьезоэлемент может быть размещен внутри, в частности, полимерного корпуса (типа «оболочки», повторяющей форму пьезоэлемента с микроскопическим зазором и с отсутствием адгезионных связей на
межфазной границе пьезоэлемент/корпус) (фиг. 1, 2) методом «вакуумной упаковки» пьезоэлемента в полимерную пленку (корпус) [Нестеров С. Развитие вакуумной техники: состояние и тенденции // Наноиндустрия. - 2012, №8. - С. 16-21]. В составном пьезоактюаторе типа «составной слой» (фиг. 3) пьезоэлементы методом «вакуумной упаковки» размещаются (в частности, с квадратной или гексагональной укладкой их в плоскости составного слоя) внутри, в частности, общей полимерной пленки, которая является общим многосвязным корпусом составного пьезоактюатора.
Для изготовления корпуса или общего многосвязного корпуса составного пьезоактюатора может быть использована «термоусадочная пленка», в частности, пленка поливинилхлоридная термоусадочная или пленка полиолефиновая термоусадочная.
Однонаправленная поляризация пьезоэлементов 1 в составном пьезоактюаторе может осуществляться посредством приложения постоянного высокого электрического напряжения на общие управляющие электроды 3, 4 пьезоактюатора (фиг. 3, 4).
Материал для корпуса 2 пьезоактюатора является упругим и достаточно податливым и, в частности, корпус 2 можно изготовить из низкомодульного полимерного или высокопористого порошкового керамического или металлического материалов, что позволит реализовать значительные (близкие к амплитудным значениям перемещений точек рабочих участков поверхности пьезоэлемента 1 при его свободных резонансных колебаниях) значения перемещений рабочих «ударных» участков внутренней поверхности корпуса 2.
Управление результирующими статичными перемещениями рабочих участков внешней поверхности (исполнительных элементов) корпуса 2 осуществляется изменением амплитуды управляющего электрического напряжения на электродах пьезоактюатора.
Пьезоэлектрические элементы могут быть заменены на магнитострикционные элементы, в частности, из материала феррит.
Устройство работает следующим образом.
Управляющее переменное (высокочастотное) электрическое напряжение с заданной резонансной (рабочей) частотой подается на электроды 3, 4 устройства (пьезоактюатора), создавая переменное электрическое поле в пьезоэлементе 1 (или электрические поля в пьезоэлементах 1 составного пьезоактюатора), что приводит к возникновению резонансных вынужденных электроупругих колебаний пьезоэлемента 1 (или пьезоэлементов) внутри замкнутого корпуса 2 (или общего многосвязного корпуса 2). Так как геометрическая форма внутренней поверхности корпуса 2 совпадает с геометрической формой пьезоэлемента 1 при этом размер малого зазора между ними (между внешней поверхностью пьезоэлемента и внутренней поверхностью корпуса) не превышает максимального значения (амплитуду) вибрационных смещений точек на внешней поверхности пьезоэлемента при его резонансных вынужденных электромеханических колебаниях, поэтому пьезоэлемент 1 будет оказывать высокочастотное импульсное (ударное) механическое воздействие своей внешней поверхностью на внутреннюю поверхность корпуса 2 и, как следствие, будет его деформировать. Инерционность и упругая податливость (низкомодульность) корпуса 2 и большая частота вынужденных электромеханических колебаний пьезоэлемента 1 и, как следствие, импульсных (ударных) воздействий на корпус 2 обуславливают требуемые квазипостоянные (статичные) во времени значения перемещений рабочих участков (исполнительных элементов) внешней поверхности корпуса 2, т.е. имеем относительно малые значения пульсаций перемещений рабочих участков корпуса относительно усредненных (по времени) значений этих перемещений. В результате, пьезоактюатор способен трансформировать большие (относительно статического случая) вибрационные резонансные колебания пьезоэлемента 1 в статичные квазипостоянные церемещения исполнительных элементов (рабочих участков внешней поверхности корпуса) устройства (пьезоактюатора).
Указанный технический результат подтвержден результатами численного моделирования на основе решения динамических стационарных связанных краевых задач механики деформируемого твердого тела о вынужденных электромеханических колебаниях пьезоэлемента в замкнутом ограниченном (внутренней поверхностью упругого корпуса) объеме с учетом высокочастотных контактных ударных взаимодействий пьезоэлемента с внутренней границей этого объема.
Результаты численного моделирования показали, что при резонансных режимах функционирования устройства (пьезоактюатора) достигается значительный рост значений деформаций корпусов пьезоактюаторов в сравнении со значениями, полученными в статическом режиме, что свидетельствует об увеличении рабочего диапазона управляемых статичных перемещений исполнительных элементов устройства (пьезоактюатора) при уменьшении его габаритных размеров.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЬЕЗОАКТЮАТОР ИЗГИБНОГО ТИПА | 2016 |
|
RU2636255C2 |
| ПЬЕЗОАКТЮАТОР ИЗГИБНОГО ТИПА | 2024 |
|
RU2829016C1 |
| СЕНСОРНАЯ СИСТЕМА | 2018 |
|
RU2698958C1 |
| САМОЧУВСТВИТЕЛЬНЫЙ МНОГОСЛОЙНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ АКТЮАТОР | 2015 |
|
RU2616225C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ АКТЮАТОР | 2024 |
|
RU2821960C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ АКТЮАТОР | 2023 |
|
RU2818079C1 |
| РЕЗОНАНСНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ГЕНЕРАТОР ТОКА НА ОСНОВЕ ЭФФЕКТА КАЗИМИРА | 2014 |
|
RU2577767C2 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ АКТЮАТОР | 2024 |
|
RU2821961C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК ДАВЛЕНИЯ | 2023 |
|
RU2828996C2 |
| ПЬЕЗОАКТЮАТОР ИЗГИБНОГО ТИПА | 2023 |
|
RU2819557C1 |
Изобретение относится к области изготовления устройств точного позиционирования на основе пьезоэлектрических и пьезомагнитных (магнитострикционных) актюаторов, в частности, в авиации для управления геометрией аэродинамических профилей лопастей вертолетов. Технический результат: увеличение рабочего диапазона управляемых статичных перемещений исполнительных элементов устройства при уменьшении его габаритных размеров. Сущность: в пьезоактюаторе, содержащем корпус, пьезоэлемент, расположенный внутри корпуса и соединенный с управляющими электродами, геометрическая форма корпуса совпадает с геометрической формой пьезоэлемента. Управляющие электроды выполнены с возможностью возбуждения резонансных электромеханических колебаний пьезоэлемента внутри корпуса. Между пьезоэлементом и внутренней поверхностью корпуса выполнен малый зазор, размер которого не превышает амплитуду вибрационных смещений точек на внешней рабочей поверхности пьезоэлемента при его вынужденных электромеханических колебаниях. Пьезоактюатор может быть выполнен составным, состоящим из однотипных пьезоактюаторов, размещенных в непрерывном упругом связующем с хаотичным или регулярным расположением корпусов в связующем. 2 н. и 6 з.п. ф-лы, 4 ил.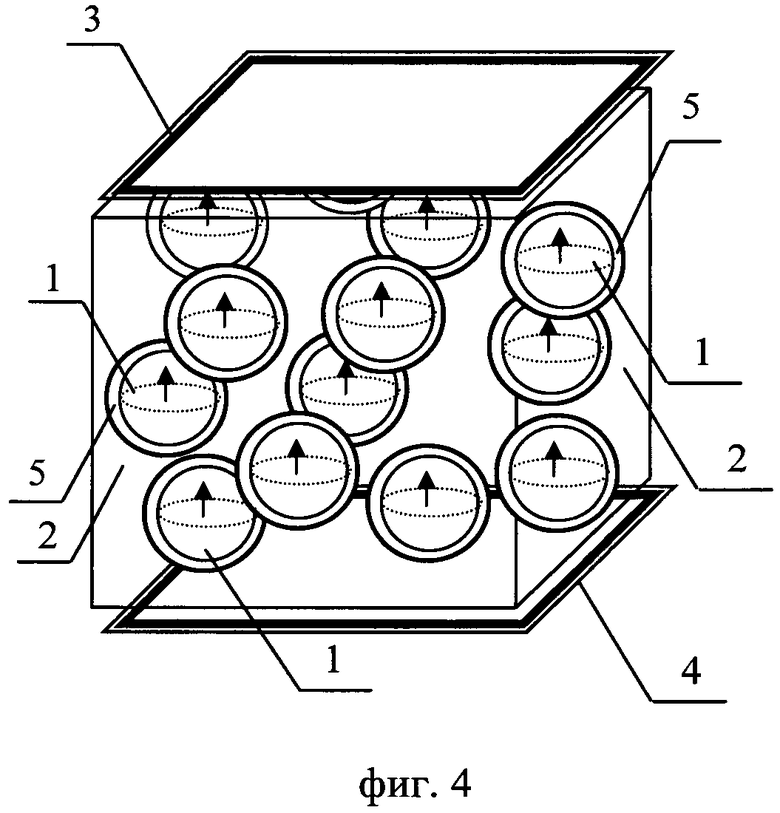
1. Пьезоактюатор, содержащий корпус, пьезоэлемент, расположенный внутри корпуса, управляющие электроды, отличающийся тем, что геометрическая форма внутренней поверхности корпуса совпадает с геометрической формой пьезоэлемента; управляющие электроды предназначены для возбуждения резонансных электромеханических колебаний пьезоэлемента внутри корпуса; между пьезоэлементом и внутренней поверхностью корпуса выполнен малый зазор, размер которого не превышает максимальную величину вибрационных смещений точек на внешней рабочей поверхности пьезоэлемента при его вынужденных резонансных электромеханических колебаниях.
2. Пьезоактюатор по п. 1, отличающийся тем, что пьезоэлемент выполнен со слоистой «пакетной» структурой из чередующихся между собой пьезоэлектрических слоев и управляющих электродов.
3. Пьезоактюатор, отличающийся тем, что он выполнен составным, состоящим из заявляемых однотипных пьезоактюаторов по п. 1, размещенных в непрерывном упругом связующем.
4. Пьезоактюатор по п. 3, отличающийся тем, что управляющие эквипотенциальные электроды различных однотипных пьезоактюаторов объединены в соответствующие общие управляющие электроды.
5. Пьезоактюатор по п. 3, отличающийся тем, что направления поляризаций пьезоэлементов в различных корпусах имеют единую пространственную ориентацию.
6. Пьезоактюатор по п. 3, отличающийся тем, что он представляет собой составной слой из однотипных пьезоактюаторов призматической или цилиндрической формы, одинаково ориентированных и соединенных между собой связующим, при этом верхние и нижние основания корпусов расположены на плоскостях составного слоя, направления поляризаций пьезоэлементов во всех корпусах имеют единую ориентацию вдоль нормали к плоскости составного слоя и управляющие эквипотенциальные электроды различных однотипных пьезоактюаторов объединены в соответствующие общие управляющие электроды, расположенные на противоположных границах составного слоя.
7. Пьезоактюатор по п. 3, отличающийся тем, что корпуса имеют микроскопические размеры, сферическую форму и расположены в связующем хаотично.
8. Пьезоактюатор по п. 3, отличающийся тем, что связующее и корпуса различных однотипных пьезоактюаторов объединены и представляют общий многосвязный корпус составного пьезоактюатора, при этом общие электроды расположены на противоположных сторонах внешней рабочей поверхности составного пьезоактюатора.
| Устройство прецизионного позицирования | 1980 |
|
SU928470A1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРИВОД ИЛИ ДВИГАТЕЛЬ, СПОСОБ ПРИВЕДЕНИЯ ЕГО В ДЕЙСТВИЕ И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 1997 |
|
RU2179363C2 |
| ЛИНЕЙНЫЙ ПРИВОД | 2007 |
|
RU2373611C2 |
| JP 10271857 А, 09.10.1998 | |||
| JP 2014128071 A, 07.07.2014 | |||
| US 7737606 B2, 15.06.2010. | |||

