Предлагаемая оптическая сенсорная ткань относится к технике построения пользовательских интерфейсов, встраиваемых в одежду, обувь и военное обмундирование, а также в иные объекты специфической формы. В робототехнике данное решение позволит «очувствить» манипуляторы и различные конструктивные поверхности.
По принципу функционирования, устройство сенсорной ткани может быть отнесено к системам активной оптической локации.
Известен ряд устройств подобного назначения. Так фирмой STMicroelectronics (IT) запатентован емкостный тканый сенсор, реагирующий на давление, оказываемое пользователем на его поверхность [1].
Фирмой Heimbach GmbH & Со (DE) запатентован текстильный продукт с интегрированным сенсором на основе пьезоэффекта, измеряющим давление и температуру [2].
Известен патент на текстильную структуру с интегрированным оптическим интерфейсом фирмы Electronics and Telecommunications Research Institute (KR) [3]. В этом устройстве оптоволоконные нити, вмонтированные в ткань, служат для организации коммуникации между мобильными устройствами.
В патенте, принадлежащем Milliken & Company (US), предложена структура, состоящая из оптического волокна, проходящего через основной набор нитей, на краях которого размещены источник света и детектор [4]. Данное устройство позволяет определить точку воздействия пользователя на данную структуру с помощью измерения утечки света, происходящей при изменении изгиба волокна в месте касания. Недостаток данного устройства очевиден - низкая чувствительность, требующая больших изгибов оптоволокна, а следствие этого - погрешность, вызываемая его износом.
Имеется большое количество патентов, основанных на оптоволоконной технике, но которые, тем не менее, не позволяют получить гибкую сенсорную поверхность. Примерами могут служить патент фирмы Nitta Corporation (JP), в котором регистрируется касание входных апертур оптоволокон [5], и патент фирмы Nitto Denko Corporation (JP), построенный на основе оптических каналов, интегрированных в полимерную основу [6]. Аналогичный принцип представлен в патентах США [7], [8], [9], [10], [11] и [12]. Все они содержат по одному набору приемных и передающих световодов, причем выходные торцы передающих световодов оптически сопряжены с входными торцами приемных, к которым подводится ИК-излучение лазера или светодиода. Выходные торцы приемных световодов оптически связаны с фотоприемниками, или, как предложено в [13] - с фотодиодной матрицей.
Устройства, предложенные в патентах [14] и [15], имеют в своем составе гибкие пленки, на которых сформированы токонесущие электроды, однако их нельзя считать в полной мере «гибкими», т.к. придать их поверхности произвольную форму невозможно.
Большой класс устройств, называемых «тактильными сенсорами», представлен перечисленными ниже патентами.
Так фирмами Seiko Epson Corporation (JP) предложен ультразвуковой тактильный сенсор [16], SynTouch (US) - губчатый материал, покрытый кожей, совмещенный с датчиком давления [17]. Фирмой Samsung Electronics Co., Ltd. (KR), запатентован гибкий тактильный сенсор на основе нанопроводников, размещенных на верхней и нижней пластинах, причем измеряя сопротивление между верхним массивом проводников и нижним, может определяться расстояние между ними и как следствие - приложенная сила и ее положение [18].
Massachusetts Institute of Technology (US) предложено устройство, состоящее из эластомера, подсвечиваемого внешним источником излучения [19, 20, 21]. При этом изменение геометрии эластомера в ответ на внешнее воздействие вызывает изменение отражения светового потока от эластомера в сторону фотоприемника. Наличие в составе эластомера непрозрачных мелкодисперсионных структур позволяет в процессе обработки сигнала фотоприемника определить положение воздействующей на эластомер силы и степень его деформации.
В статье [22] рассмотрено построение оптоволоконных датчиков и сенсоров на основе изменения оптических потерь и длины волны проходящего через них излучения при деформациях и температуры.
В работе [23] рассмотрено построение тактильного сенсора на основе измерения потерь в оптоволокне, возникающих при его механической деформации.
В работе [24] приведено описание тактильного сенсора, выполненного в виде четырехслойной структуры. Верхний и нижний слои не обладают оптическими свойствами и могут быть выполнены из тонкой проволоки. Второй и третий слои представляют собой оптоволокна (световоды) стандартного коммуникационного кабеля внешним диаметром 125 мкм и с сердцевиной диаметром 52 мкм и образуют квадратную сетку с ячейками от 2×2 до 6×6 мм. Входные торцы оптоволокон освещаются инфракрасными диодами, а выходные оптически сопряжены с фотоприемниками, подключенными к вычислительному устройству. Изменение оптического затухания в оптоволокнах, вызванное их деформацией при воздействии внешней силы, регистрируется вычислительным устройством. Таким образом, может быть определена координата приложения внешней силы к поверхности тактильного сенсора. Недостатком данного устройства является необходимость непосредственного приложения внешней силы к оптоволокнам, для обеспечения их деформации. Данное устройство наиболее близко по своему функционированию к предлагаемому и является его прототипом.
Целью предлагаемого изобретения является повышение функциональных возможностей, заключающихся в том, что оно позволяет определить координату объекта, до момента касания им сенсорной ткани. Таким образом, не требуется воздействие внешней силы для определения координаты. Это в свою очередь повышает надежность, устраняя возможность появления микротрещин в оптоволокне. В отличие от прототипа еще одной функциональной особенностью предложенного технического решения является способность одновременного измерения координат нескольких объектов, оказавшихся в пределах оптической связи с сенсорной тканью, а также габаритных характеристик объекта.
Известно устройство [24], содержащее два слоя, перпендикулярно размещенных оптических световодов, в котором световоды первого слоя оптически связаны с излучателями, а световоды второго слоя оптически связаны с фотоприемниками. Кроме того, в состав этого устройства входит вычислитель, выходы которого подключены к излучателям, а входы, к выходам фотоприемникам.
Отличием предлагаемого технического решения от прототипа является то, что световоды относятся к классу световодов « бокового свечения», либо к люминесцентным, кроме того, на их поверхность нанесено поляризационное покрытие в виде регулярной структуры, состоящей из металлизированных полосок или проволоки, разделенных пространственным промежутком. Плоскость поляризации этой структуры должна быть выбрана вдоль или поперек центральной оси оптического волокна. Вместо металлизированных полос или проволоки на поверхности световодов могут быть выполнены треугольные нарезки, на одну из граней которых нанесено металлизированное покрытие.
Таким образом, неполяризованное излучение, входящее во входной торец световода первого слоя с помощью соответствующего излучателя, переизлучается его боковой поверхностью уже в поляризованном состоянии.
На основании принципа обратимости световых лучей световод, обладающий свойством светимости внешней поверхности, концентрирует падающее на него излучение в сердцевину, и далее перемещает его к своим торцам. Кроме того, наличие на поверхности световода поляризационной структуры гасит излучение, напрямую попадающее на эту поверхность от световодов первого слоя, т.к. направления поляризации этих слоев взаимно перпендикулярны.
Появление на пути излучений, формируемых световодами первого слоя, объекта контроля, вызывает отражение падающего на него излучения, в том числе частично в сторону световодов второго слоя. Распространяясь по сердцевине, часть этого излучения достигает торца и попадает на поверхность соответствующего фотоприемника.
Вычислитель формирует на своих выходах сигналы последовательного включения излучателей, создаваемые при этом потоки поляризованного излучения сканируют пространство над сенсорной тканью. Осуществляя синхронный с каждым включением излучателя ввод сигналов фотоприемников, оптически связанных с световодами второго слоя (всех фотоприемников для каждого включенного излучателя), и последующую обработку этих сигналов, можно определить положение одного или нескольких контролируемых объектов, либо объекта сложной топологии, отражающих излучение в сторону световодов второго слоя.
Иными словами, положение объекта контроля, находящегося в зоне оптической локации предлагаемой сенсорной тканью, может быть однозначно локализовано.
Функционирование и устройство предлагаемой оптической сенсорной ткани иллюстрируется следующими фигурами:
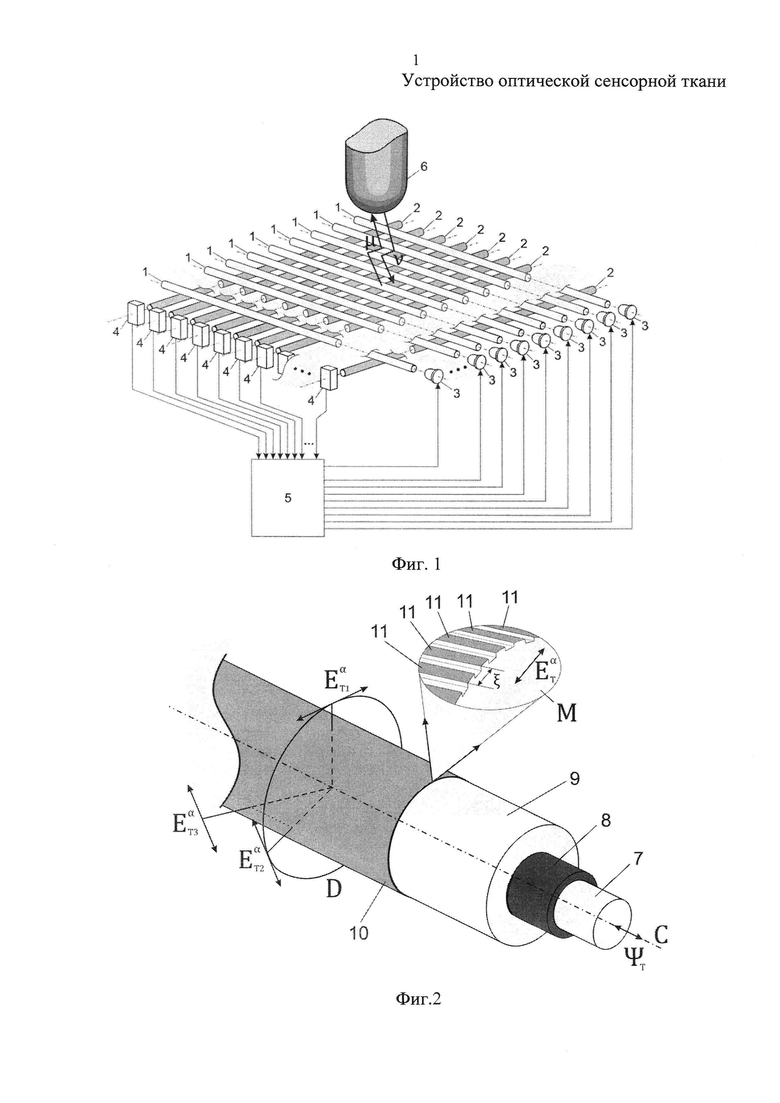
Фиг. 1 - функциональная схема оптической сенсорной ткани, где:
1 - световоды первого слоя;
2 - световоды второго слоя;
3 - оптические излучатели;
4 - фотоприемники;
5 - вычислитель;
6 - объект контроля;
μ - оптическая связь объекта контроля 6 с световодом 1;
ν - оптическая связь объекта контроля 6 с световодом 2.
Фиг. 2 - первый вариант исполнения световодов, где:
7 - сердцевина световода;
8 - рассеивающий слой;
9 - защитная оболочка;
10 - поляризационный слой;
11 - металлизированная полоска;
М - увеличенное изображение фрагмента поляризационного слоя;
ξ - шаг размещения металлизированных полосок;
С - оптическая ось (осевая линия) световода;
D - окружность с центром на С и перпендикулярная ей;
ΨT - направление входного или выходного оптических потоков;
 ,
,  ,
,  ,
,  - направления поляризации выходного или входного оптического потока.
- направления поляризации выходного или входного оптического потока.
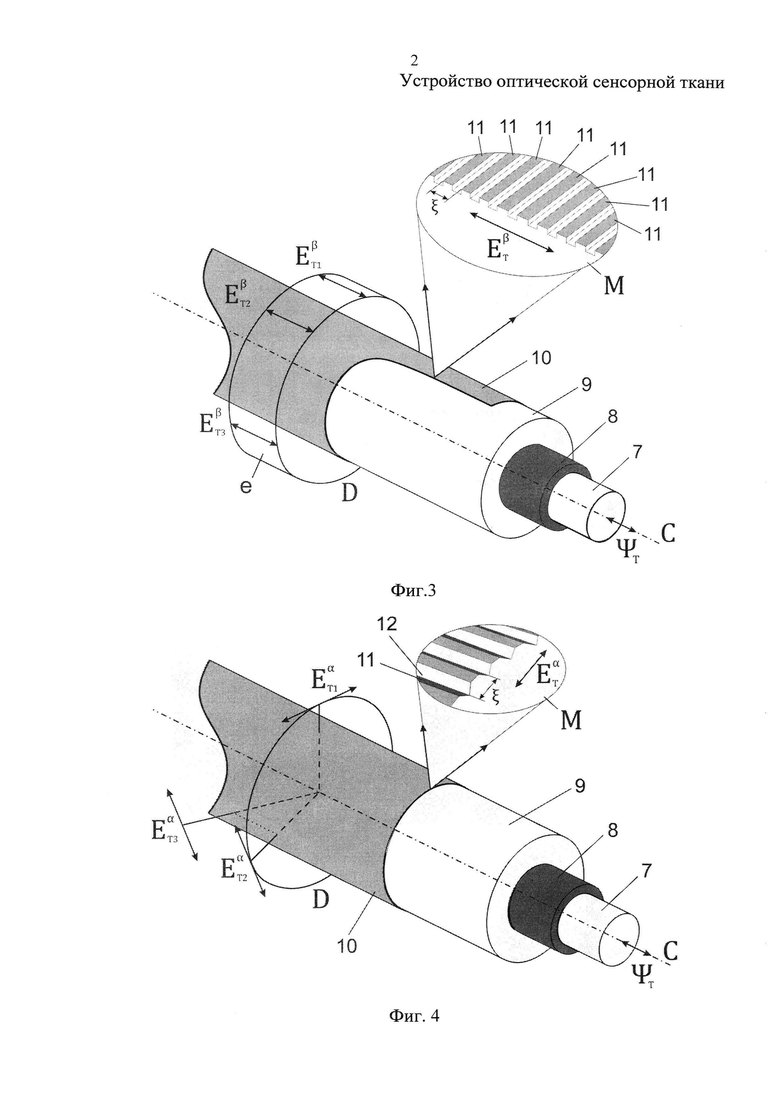
Фиг. 3 - второй вариант исполнения световода, где:
 ,
,  ,
,  ,
,  - направления поляризации выходного или входного оптического потока,
- направления поляризации выходного или входного оптического потока,
е - поверхность цилиндра, описанная вокруг оси С.
Фиг. 4 - третий вариант исполнения световода, где:
12 - канавки треугольного профиля.
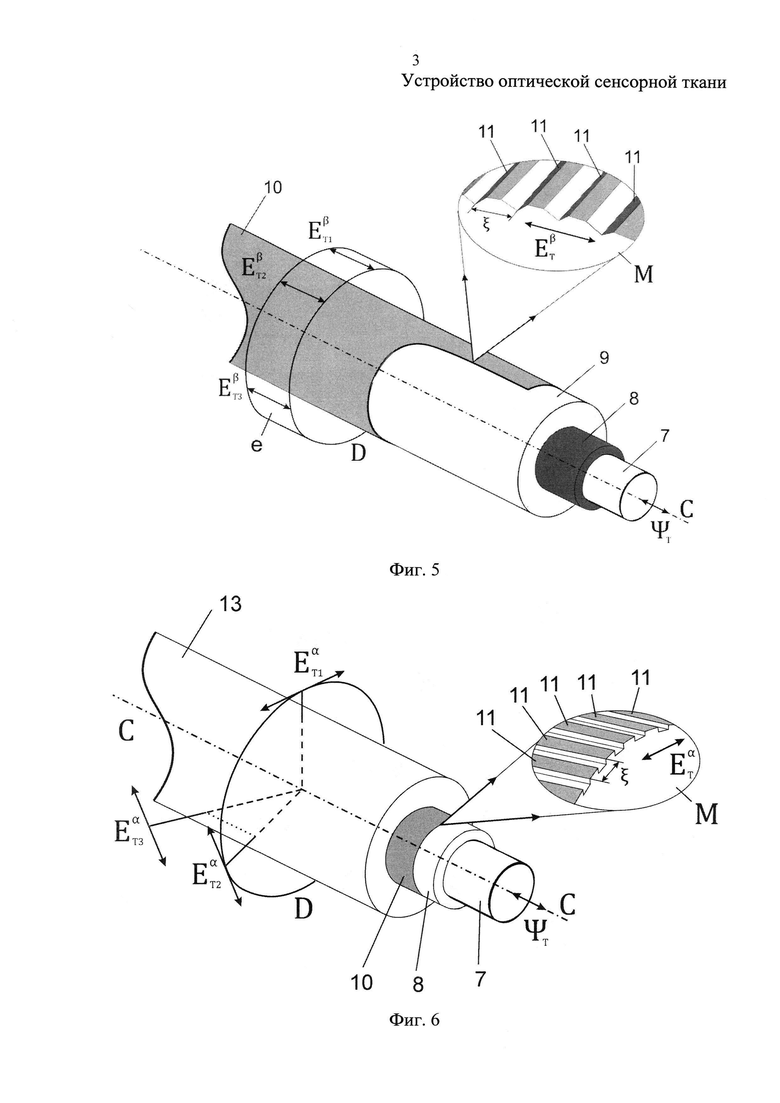
Фиг. 5 - четвертый вариант исполнения световода.
Фиг. 6 - пятый вариант исполнения световода, где:
13 - внешняя оболочка.
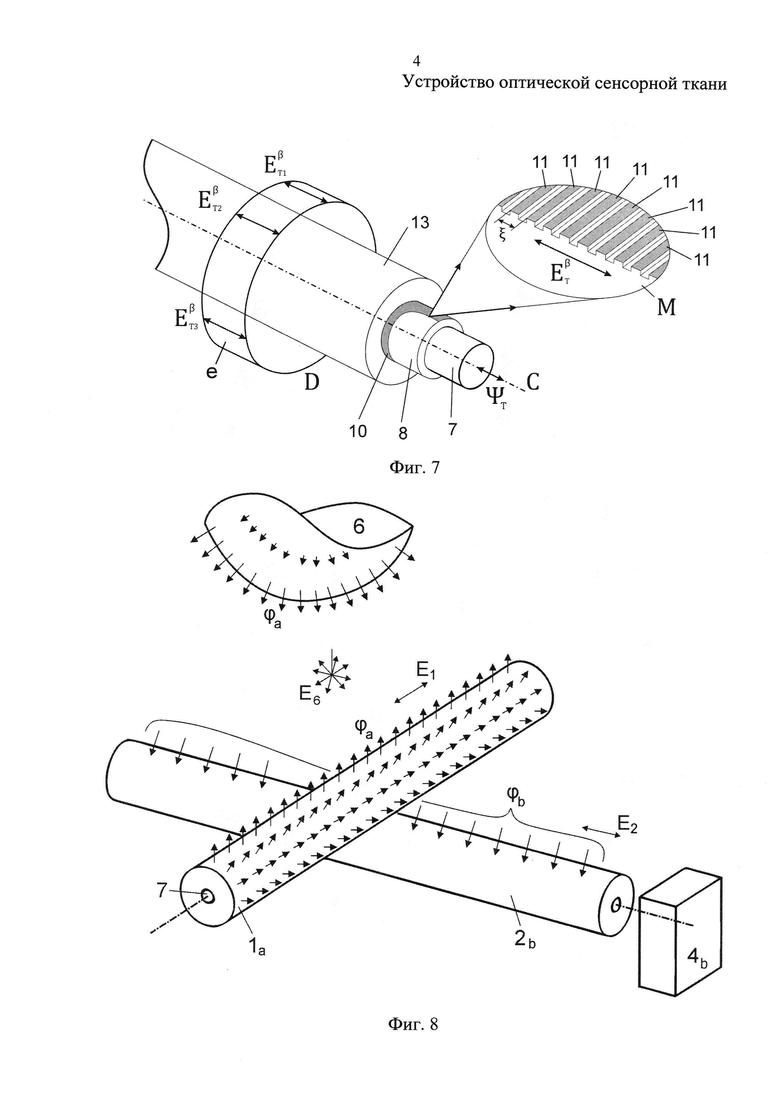
Фиг. 7 - шестой вариант исполнения световода.
Фиг. 8 - геометрическая схема активной локации объекта 6, где:
1a - а-й световод первого слоя;
2b - b-й световод второго слоя;
Фа - оптический поток, излучаемый а-м световодом первого слоя;
ϕa - оптический поток, отраженный объектом контроля 6;
ϕb - оптический поток, падающий на поверхность b-го световода второго слоя.
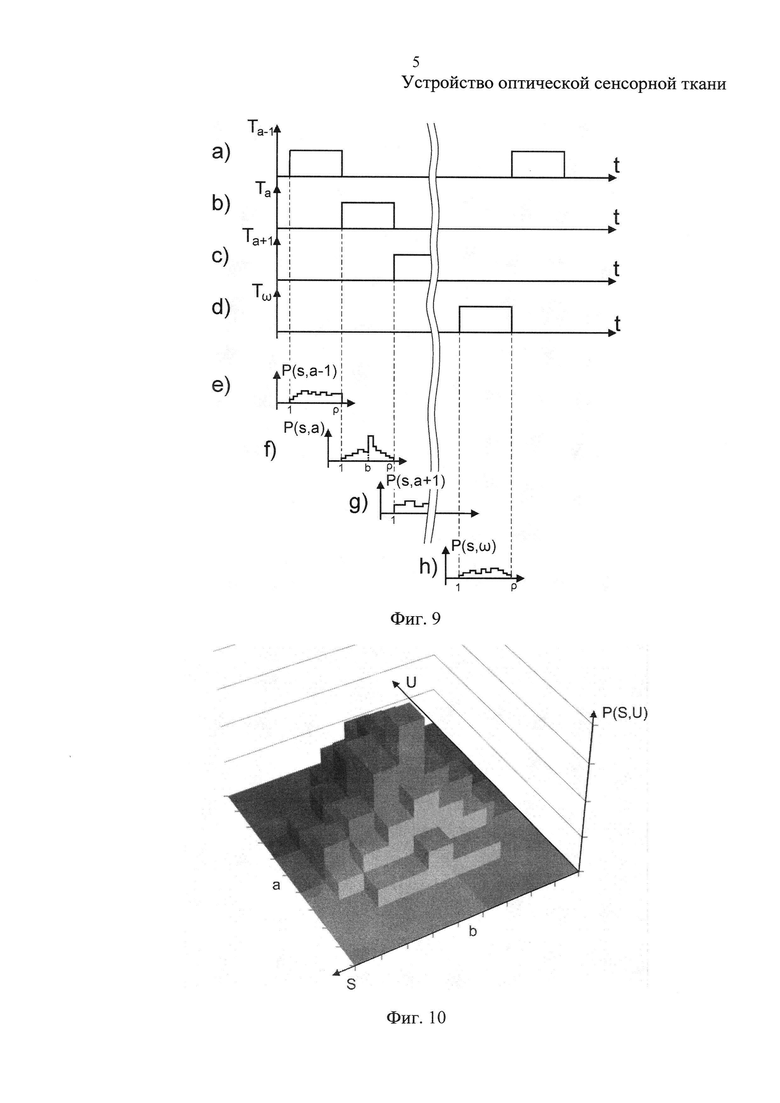
Фиг. 9 - временная диаграмма сигналов вычислителя 5, где:
Ta-1, Та, Ta+1, … Тω - сигналы включения u-1, u, u+1, … ω излучателей;
P(s, а-1), P(s, a), P(s, а+1), P(s, ω) - сигналы фотоприемников s=1…p, при включенных а-1, а, а+1, … ω излучателях соответственно.
Фиг. 10 - изображение функции P(s, u) в 3D виде.
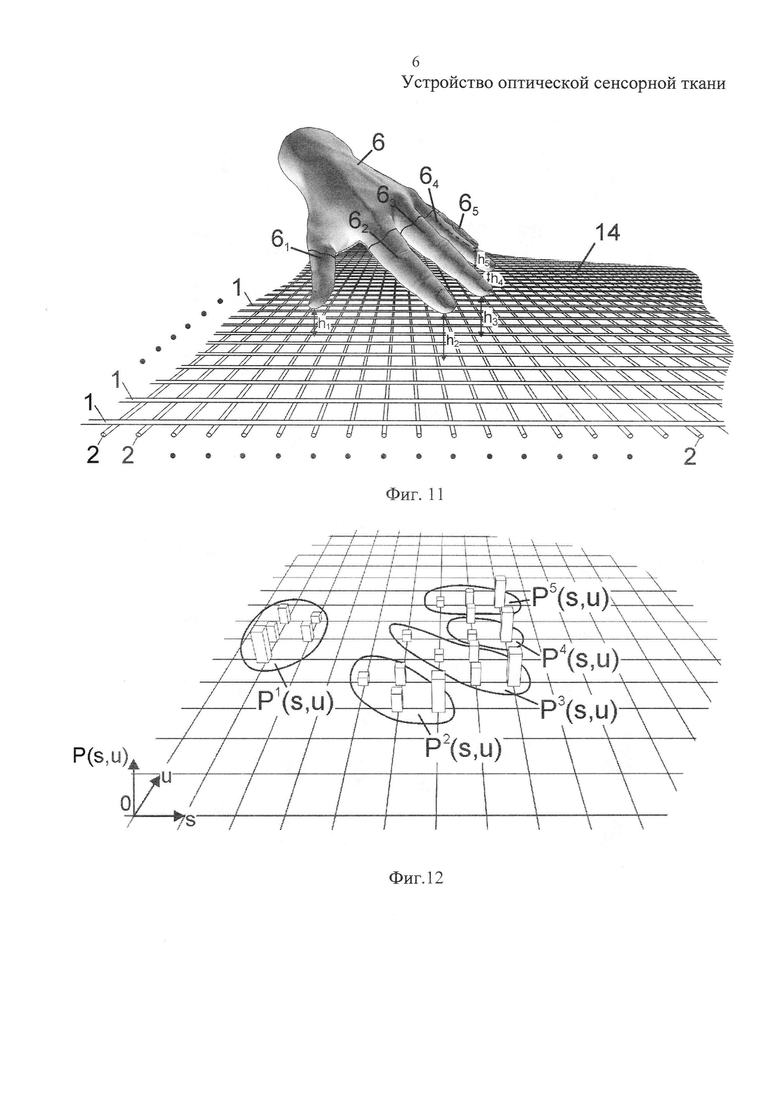
Фиг. 11 - геометрическая схема активной локации объекта контроля сложной топологии, где:
61, 62, 63, 64, 65 - 1…5-й фрагменты объекта контроля 6;
14 - оптическая сенсорная ткань.
Фиг. 12 - изображение функции P(s, u) в 3D виде для объекта контроля сложной топологии, где:
P1(s, u), P2(s, u), P3(s, u), P4(s, u), P5(s, u) - 1…5-ая области функции P(s, u), соответствующие фрагментам объекта 6.
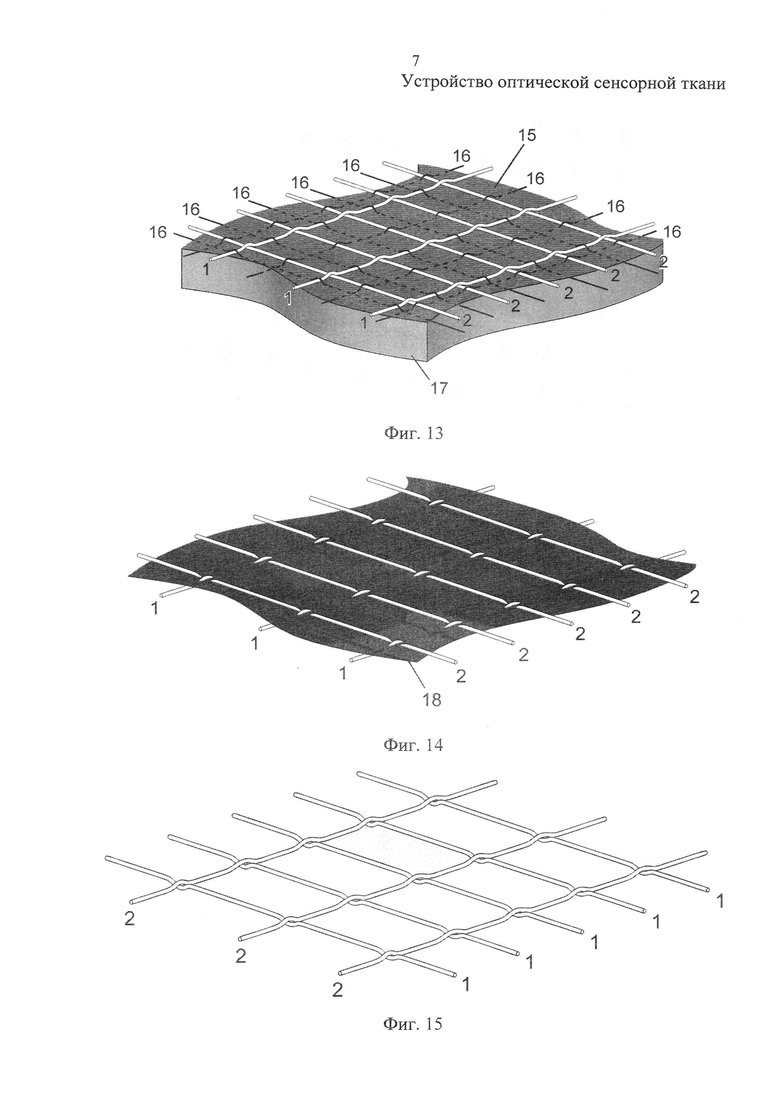
Фиг. 13 - вариант геометрического расположения первого и второго слоев световодов над поглощающим излучение материалом, где:
15 - поглощающая тканая прокладка;
16 - скрепляющее волокно;
17 - основание.
Фиг. 14 - иллюстрация расположения первого и второго слоев световодов между тканой прокладкой, где:
18 - непрозрачная тканая прокладка.
Фиг. 15 - иллюстрация переплетения световодов первого и второго слоев.
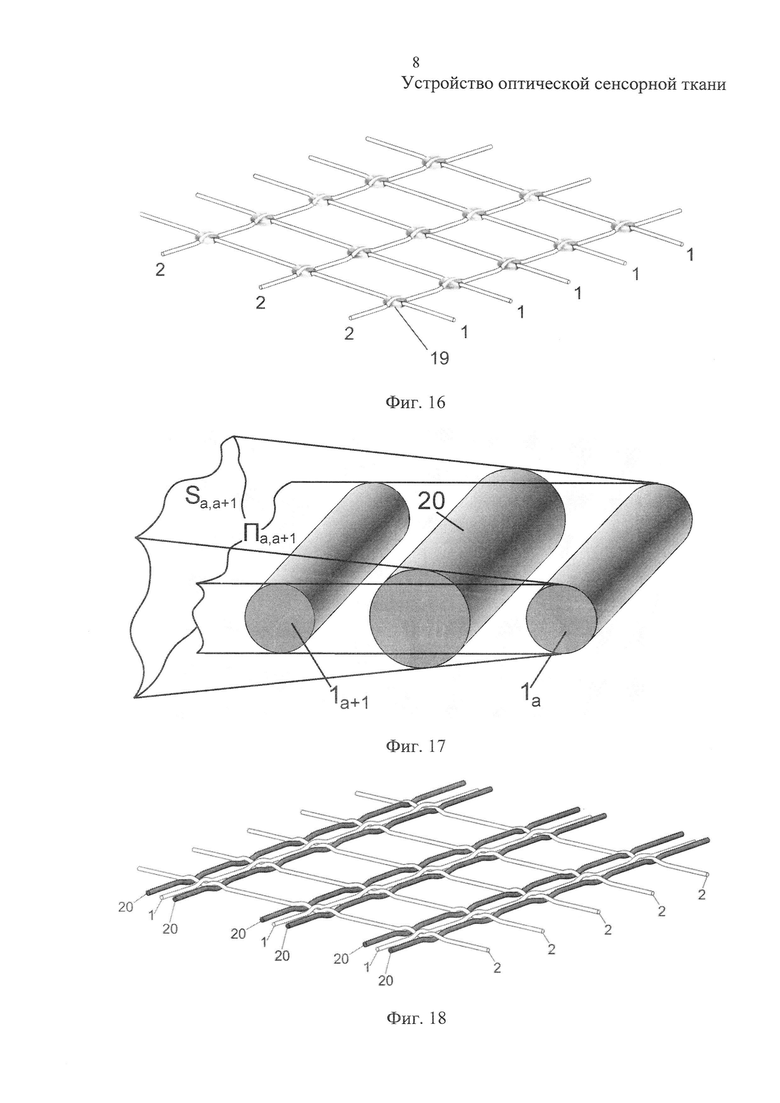
Фиг. 16 - иллюстрация клеевого крепления световодов первого и второго слоев, где:
19 - клеевое соединение.
Фиг. 17 - иллюстрация экранирования соседних световодов с помощью дополнительного волокна, где:
20 - экранирующее волокно;
Пa, а+1 - паразитное излучение;
Sa, a+1 - теневой сегмент.
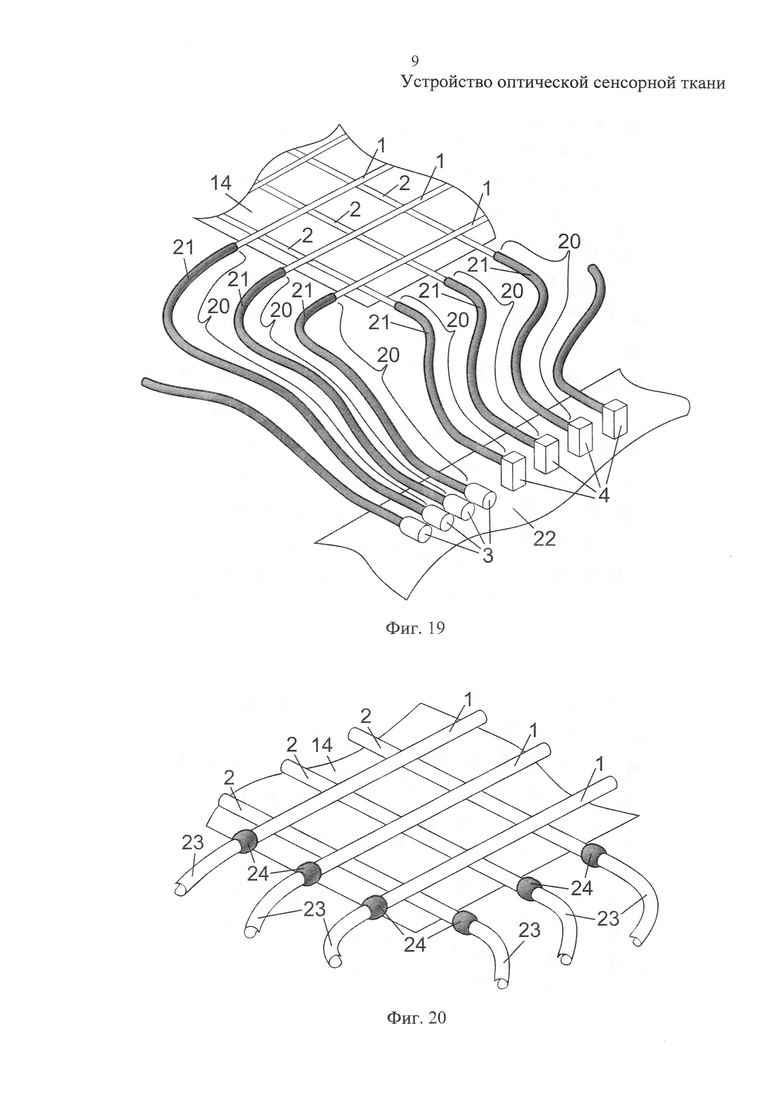
Фиг. 18 - фрагмент оптической сенсорной ткани, дополненной экранирующими волокнами.
Фиг. 19 - применение непрозрачной оплетки на свободных участках световодов, где:
20 - свободный участок световода,
21 - внешняя оплетка световода,
22 - печатная плата.
Фиг. 20 - применение оптоволокна с торцевым свечением на свободных участках световодов, где:
23 - оптическое волокно с торцевым свечением,
24 - сварное или клеевое соединение волокон.
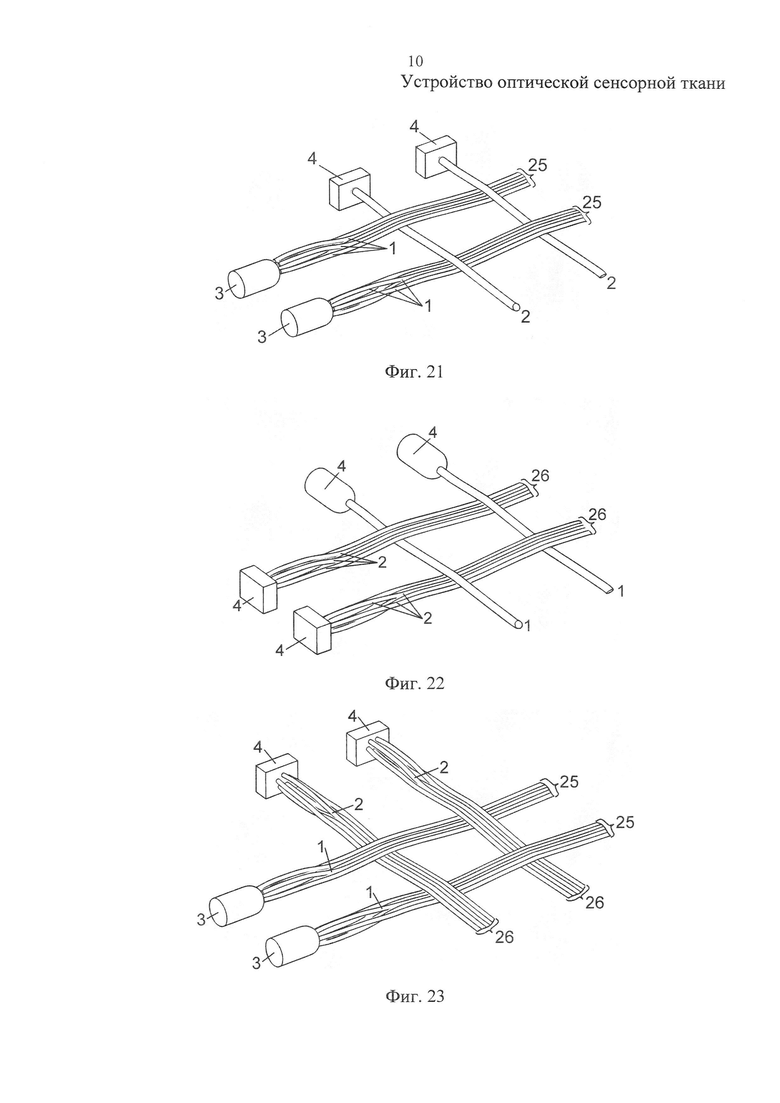
Фиг. 21 - пример увеличения потока излучения световодов первого слоя, где:
25 - группа параллельно размещенных световодов первого слоя.
Фиг. 22 - пример повышения чувствительности второго слоя световодов, где:
26 - группа параллельно размещенных световодов второго слоя.
Фиг. 23 - световоды, размещенные группами в первом и втором слоях.
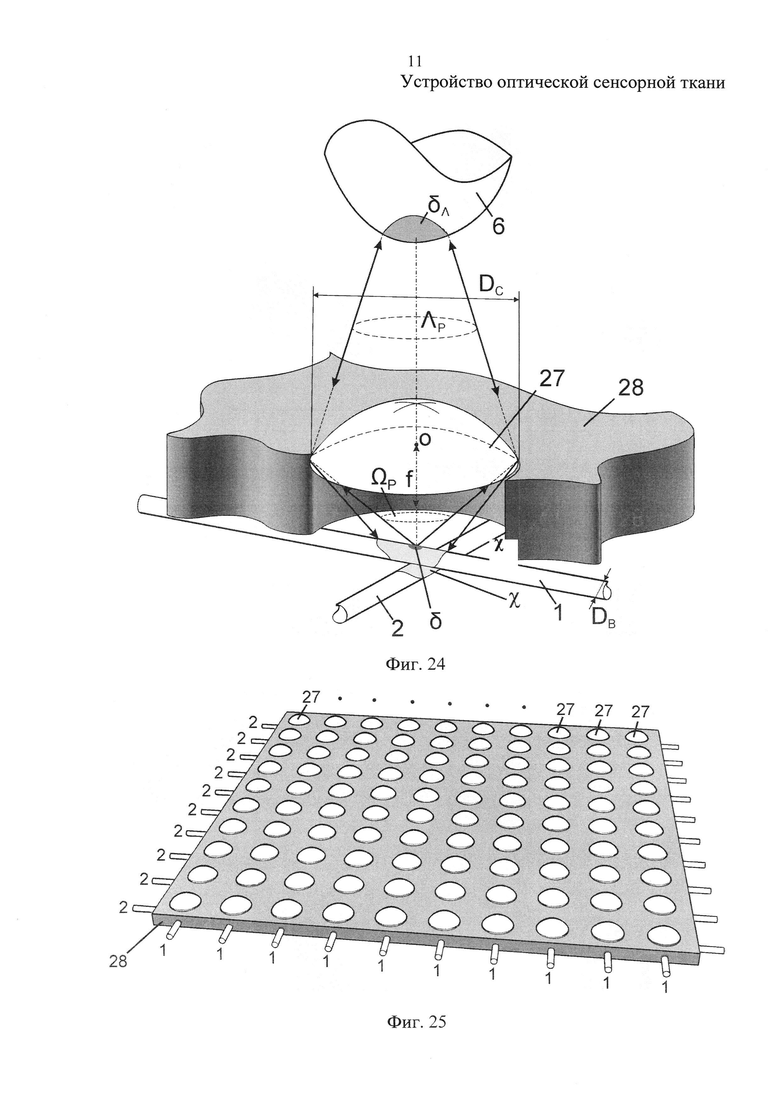
Фиг. 24 - фрагмент многолинзового покрытия, где:
27 - линза (конденсор);
28 - опорное покрытие;
О - оптический центр линзы 27;
ƒ - фокусное расстояние линзы 27;
DC - диаметр линзы 27;
DB - диаметр световода 1;
σ - фрагмент излучаемой поверхности;
σΛ - изображение σ;
χ - изображение σΛ.
Фиг. 25 - пример оптической сенсорной ткани с использованием «линзовой матрицы».
Устройство и функционирование оптической сенсорной ткани иллюстрируется на фиг. 1.
Два слоя оптических световодов 1 и 2 размещены перпендикулярно друг другу, один слой над другим. Будем считать далее слой 1 - верхним, а слой 2 - нижним, причем верхний слой расположен со стороны, в которой расположен объект контроля 6, а слой 2 обращен к объекту, на котором размещается данная ткань. Торцы световодов верхнего слоя 1 оптически связаны с излучателями 3, а торцы световодов нижнего слоя 2 оптически связаны с фотоприемниками 4.
Световоды, используемые в предлагаемой сенсорной ткани, обладают кроме прочего, известным свойством светимости боковой поверхности.
Данный тип световодов испускает свечение с внешней стороны волокна, при направлении светового потока в его центральную часть. Известны волокна, обладающие данным свойством - это так называемые «люминесцентные оптические волокна» [25]. Материал этих волокон в процессе производства легирован соответствующим активным материалом. Излучение, входящее поперечно в световод, взаимодействует с присадками в сердцевине. Возникающее при этом оптическое излучение, которое в принципе является изотропным, генерируется, если длина волны возбуждающего излучения соответствует характеристикам поглощения примеси.
Большое распространение получили световоды бокового свечения, выполненные на основе полимерных материалов, так называемые POF [26].
Данный тип световодов состоит из сердцевины, по которой распространяется введенное в световод излучение, рассеивающий слой, содержащий дисперсионный материал, рассеивающий излучение, частично проникающее в этот слой из сердцевины, и защитную оболочку.
Однако известные световоды не обладают свойством поляризации излучения, испускаемого боковой поверхностью либо падающего на нее.
Для придания этого свойства предлагается следующее. На поверхность световодов наносится поляризационный слой в виде регулярной структуры, состоящей из металлизированных полосок или проволоки, разделенных пространственным промежутком - так называемый «Metal mesh based components» [27, 28, 29, 30]. На фиг. 2 изображен фрагмент световодов 1 и 2, с нанесенным на них поляризационным слоем.
Пример выполнения данного типа поляризатора, нанесенного на плоскую поверхность, описан в [27, стр. 89-90].
Неполяризованный световой поток излучателя 3 входит в торец световода 1 и распространяется по его сердцевине 7. Далее, частично рассеиваясь слоем 8, входя и распространяясь в защитной оболочке 9, проходит через поляризационный слой 10, нанесенный на внешнюю поверхность защитной оболочки 9, приобретая свойство поляризованного.
Увеличенное изображение поляризационного слоя 10 изображено в виде выноски М. Он состоит их металлизированных полосок 11, нанесенных на защитную оболочку и параллельных оптической оси С, шаг между которыми ξ, меньше рабочей (входящей в поляризатор от излучателя 4) длины волны λ.  показывает направление поляризации излучаемого световодом 1 оптического потока.
показывает направление поляризации излучаемого световодом 1 оптического потока.
Таким образом, учитывая симметричное расположение металлизированных полосок 11 относительно оптической оси С световода, с поверхности световода 1 излучается световой поток, направление поляризации которого также симметрично оптической оси С.
На фиг. 3 изображен фрагмент световода 1, с нанесенным на него поляризатором данного типа, отличие которого от представленного на фиг. 2 состоит в направлении металлизированных полосок 11, перпендикулярных направлению оптической оси С, и соответственно в направлении вектора поляризации  .
.
Для него также справедливо, что учитывая симметричное расположение металлизированных полосок 11 относительно оптической оси С световода, с поверхности световода 1 излучается световой поток, направления поляризации которого симметрично оптической оси С, и лежат на поверхности цилиндра е, боковая поверхность которого параллельна оптической оси С.
Для формирования оптического поляризатора на поверхность световода бокового свечения может быть также нанесена структура, аналогичная описанной в [30] и изображенная на фиг. 4. Этот тип поляризационного слоя формируется нанесением на защитный слой 9 канавок треугольного профиля 12, на одну из граней которого наносится металлизированное покрытие 11.
На фиг. 5 изображена структура, почти аналогичная изображенной на фиг. 4, с отличающимся направлением нанесения канавок треугольного профиля 12 и соответственно направлением вектора поляризации .
На фиг. 6 изображен световод, в котором поляризационный слой 10 нанесен непосредственно на рассеивающий слой 8, а защитный слой 9 поверх поляризационного. Это увеличивает надежность поляризационного слоя при механических воздействиях на световод. Появление дополнительного преломляющего промежутка - толщины защитного слоя 9, может незначительно поворачивать направление поляризации преломленных лучей, проходящих через него. Однако для лучей, падающих со световодов первого слоя на световоды второго слоя, имеющие аналогичный преломляющий промежуток, происходит возвращение угла поляризации к первоначальному, задаваемому направлением металлизированных полосок 11.
На фиг. 7 изображен вариант, отличающийся от изображенного на фиг. 6 направлением поляризационных полосок 11.
Для изготовления поляризатора, нанесенного на боковую поверхность световода, может быть применена технология производства, принадлежащая ВМФ США [31], основанная на голографическом формировании изображений параллельных элементов на поверхности материала, обработанного фоторезистом.
Таким образом, неполяризованное излучение, входящее во входной торец световода первого слоя, переизлучается его боковой поверхностью уже в поляризованном состоянии. Можно отметить, что в случае использования поляризованного излучения, входящего во входной торец световода первого слоя, оно, в ходе многократного переотражения в сердцевине 7, деполяризуется, что в любом случае требует наличия на световоде поляризационного слоя 10.
Как было сказано выше, световоды 1 и 2 аналогичны друг другу, т.е. имеют одинаковый поляризационный слой 10. При этом световод, обладающий свойством светимости внешнего слоя, по закону обратимости световых лучей, изложенному например в [32, стр. 255], будет концентрировать падающее на его поверхность излучение в сердцевину, по которой излучение распространится к его торцу. Использование этого свойства рассмотрено в работе [25 р. 210, 213]. Там же на fig. 8.6 представлено устройство для определения размера объекта, тень которого падает на оптический аттенюатор, выполненный на основе флюоресцирующего оптоволокна, т.е. принципиально волокна бокового свечения.
Направления поляризации и определяют оси, в направлении которых поглощение излучения практически отсутствует, т.е. так называемые «оси свободного пропускания» [33, стр. 362].
Для поляризационного покрытия 10, изображенного на фигурах 2, 4 или 6, оси свободного пропускания будут расположены перпендикулярно центральной оптической оси С, световодов 1 или 2, образуя касательные к поверхности поляризационного покрытия 10. Либо, как изображено на фиг. 2, эти оси, например  ,
,  ,
,  , образуют касательные к окружности D, выходящей за пределы боковой поверхности световода, причем центр D расположен на оптической оси С.
, образуют касательные к окружности D, выходящей за пределы боковой поверхности световода, причем центр D расположен на оптической оси С.
Для поляризационного покрытия 10, изображенного на фигурах 3, 5 или 7, оси свободного пропускания будут расположены параллельно центральной оптической оси С, световодов 1 или 2. На фиг. 3 эти оси, например  ,
,  ,
,  , как было отмечено выше, лежат на поверхности цилиндра е, боковая поверхность которого параллельна оптической оси С.
, как было отмечено выше, лежат на поверхности цилиндра е, боковая поверхность которого параллельна оптической оси С.
Поляризационное покрытие 10 оптоволокон первого слоя поглощает электрическую компоненту EX оптического излучения, исходящего из сердцевины 7 световода 1, параллельную металлизированным полоскам 11, образующим поляризационное покрытие 10. В результате, оптический поток, исходящий с поверхности световода 1 приобретает поляризацию, перпендикулярную направлению металлизированных полосок 11.
Поляризационное покрытие 10 оптоволокон второго слоя поглощает поляризованное излучение, напрямую падающее на него от световодов первого слоя, т.к. направления поляризации этих слоев - или взаимно перпендикулярны, что определено перпендикулярным расположением световодов 1 и 2 в оптической сенсорной ткани. Таким образом, отсекается паразитное, не несущее полезной информации излучение. В данном контексте «полезную информацию» несет излучение, отраженное от объекта контроля.
Если поверхность объекта контроля 6 не обладает свойством анизотропии и зеркальностью, отраженное от него излучение теряет свойство полностью поляризованного [32, глава XXIII]. В результате, излучение, с электрической компонентой EY, перпендикулярной направлениям металлизированных полосок 11 поляризационной поверхности 10, и с соответствующей ей магнитной компонентой, достигает сердцевины 7 световода 2. Далее, распространяясь по ней и деполяризуясь (в результате многократных внутренних отражений), оптическое излучение достигает торца световода и попадает на поверхность оптически связанного с ним фотоприемника 4.
На фиг. 8 иллюстрируется процесс активной оптической локации объекта 6 предложенным устройством, причем энергетический центр падающего на объект контроля 6 излучения находится над точкой пересечения световодов 1а и 2b. При этом излучение Фа, формируемое а-м световодом первого слоя 1а, поляризовано в направлении, обозначенном Е1. Далее часть Фа, отражается от объекта контроля 6, в виде деполяризованного, с направлениями Е6 излучения ϕа, направленного в сторону b-го световода 2b. Оптический поток ϕb, являющийся частью оптического потока ϕа, и достигший поверхности световода 2b, проходит через поляризующую поверхность 10, достигает сердцевины 7 световода 2b, и распространяется к его торцу, достигая далее фотоприемника 4b.
На фиг. 9 изображены временные диаграммы, иллюстрирующие работу предложенного устройства, содержащего ω оптоволокон первого слоя и ρ оптоволокон второго слоя. Сигнальная комбинация, представленная на этой фигуре, соответствует объекту контроля, находящемуся на пересечении а-го световода первого слоя и b-го световода второго слоя.
На первой временной диаграмме а) изображен сигнал Ta-1 включения излучателя номер а-1, вырабатываемый вычислителем 5. Для этой ситуации, на диаграмме е) изображен сигнал P(s, a-1), который представляет амплитуды фотоприемников (1…ρ).
На временной диаграмме b) изображен сигнал Та включения излучателя номер u. Для этой ситуации, на диаграмме f) изображен сигнал P(s, а), который представляет амплитуды тех же фотоприемников (1…ρ), с максимумом в точке а, т.е. при подсветке объекта контроля 6 излучением а-го световода первого слоя.
На временной диаграмме с) изображен сигнал Ta+1 включения излучателя номер u+1. Для этой ситуации, на диаграмме g) изображен сигнал P(s, а+1), который представляет амплитуды тех же фотоприемников (1…ρ).
На временной диаграмме d) изображен сигнал Тω включения излучателя номер ω. Для этой ситуации, на диаграмме h) изображен сигнал P(s, ω), который представляет амплитуды тех же фотоприемников (1…ρ).
На фиг. 10 изображен пример сигнальной функции P(s, u), для объекта контроля 6.
Так как объект контроля 6 находится наиболее близко к световодам a и b первого и второго уровня соответственно, функция P(s, u) имеет экстремум в точке (a, b).
Таким образом, для определения положения объекта контроля 6 относительно первого и второго световодных слоев, вычислитель 5, вводит в память сигналы фотоприемников (1…ρ) для каждого излучателя (1…ω) и строит множество функций:

где: P(s, u) - амплитуда сигнала s-го фотоприемника, при включенном u-м излучателе,
ω - количество световодов первого слоя,
ρ - количество световодов второго слоя;
Координаты объекта контроля 6 могут быть определены из уравнения:

где: s*, u* - номера световодов первого и второго слоев, над которыми находится энергетический центр излучения объекта контроля 6.
При наличии над световодными слоями 1 и 2 объекта сложной формы, например кисти руки с пальцами, обращенными в сторону сенсорной ткани, в функции (1), функция P(s, u) будет иметь несколько локальных экстремумов, зависящих от геометрического расположения пальцев.
Геометрическая схема этой ситуации изображена на фиг. 11.
На кисти руки выделены фрагменты пальцев - 61…65, кончики которых находятся на расстояниях h1, h2, h3, h4, h5 от сенсорной ткани 14.
Величина переотраженных излучений с поверхностей 61…65 зависит от их отражающей способности, а освещенность, создаваемая этими излучениями на поверхностях световодов, еще и от усредненного расстояния до них. Значения сигналов фотоприемников 4 изображены на фиг. 12 и образуют области:
P1(s, u), P2(s, u), P3(s, u), P4(s, u), P5(s, u),
соответствующие фрагментам 61…65.
Точки локальных экстремумов функции P(s, u):

являются характеристиками положения объекта 6, относительно оптической сенсорной ткани, где n - максимальное количество локальных максимумов функции P(s, u).
При размещении оптической сенсорной ткани на отражающем основании 17, возможно появление паразитных засветок, вызванных переотражением излучения световодов первого слоя, в сторону световодов второго слоя.
Для исключения этого под световодами второго слоя может быть размещен третий слой в виде тканой прокладки, поглощающей световой поток, формируемый первым слоем в направлении основания.
На фиг. 13 приведено размещение первого 1 и второго 2 слоев над тканой прокладкой 15. При этом тканая прокладка 15 обеспечивает поглощение той части излучения Фа, которая направлена в сторону основания 17, и препятствует его дальнейшему переотражению в сторону световодов второго слоя 2. Для крепления световодов первого и второго слоев к третьему слою используется скрепляющее волокно 16.
Кроме того, может быть использован третий слой, непрозрачный для излучения формируемого световодами первого слоя и размещаемый между первым и вторым слоями.
На фиг. 14 иллюстрируется размещение такого слоя 18, выполненного в виде непрозрачной тканой прокладки. Первый и второй слои пересекаются на отдельных участках, образуя сквозные пересечения непрозрачной тканой прокладки 18. При этом излучение от световодов первого слоя 1 может отражаться основанием 17, однако это излучение, благодаря непрозрачной тканой прокладке 18, не достигает световодов 2 слоя.
Для увеличения механической прочности и фиксации расположения световодов первого 1 и второго 2 слоев может быть выполнено их переплетение, как изображено на фиг. 15.
Кроме того, скрепление световодов первого и второго слоев может быть осуществлено их клеевым креплением. Иллюстрация такого способа приведена на фиг. 16. На ней изображен фрагмент оптической сенсорной ткани, на которой точки пересечения световодов скреплены клеевым соединением 19.
При достаточно близком взаимном расположении световодов 1 первого слоя возможно проникновение оптического потока излучающего световода, в соседний с ним световод этого же слоя. Далее световод, в который проникло это излучение, будет частично переизлучать его, в том числе в сторону объекта контроля 6, что может повлиять на точность определения положения объекта контроля. Для исключения этого дополнительно может быть введена, по крайней мере одна нить из материала, непрозрачного для данного излучения, расположенная между соседними световодами первого слоя.
Сказанное иллюстрируется на фиг. 17. Паразитное излучение Па,а+1, направленное от световода 1а сторону световода 1a+1, перегораживается экранирующим волокном 19, выполненным из оптически непрозрачного материала. При этом теневой сегмент Sa,a+1 с запасом перекрывает световод 1a+1.
На фиг. 18 изображен фрагмент оптической сенсорной ткани, дополненной для большего эффекта двумя непрозрачными для излучения экранирующими волокнами 19.
Для упрощения монтажа оптической сенсорной ткани предлагается обеспечить возможность объединения световодов первого и второго слоев в единый жгут. Параллельное расположение неиспользуемых участков световодов, т.е. тех отрезков световодов, которые не создают ортогональную структуру оптической сенсорной слоя со световодами второго слоя, ведет к проникновению поляризованного излучения с поверхности первых во вторые. Для исключения этого необходимо обеспечить экранирование каждого световода первого слоя непрозрачной для излучений оплеткой.
Сказанное иллюстрируется на фиг. 19. Наличие на свободном участке 20 непрозрачной оплетки 21 исключает проникновение поляризованного излучения с боковой поверхности свободного участка световода в боковую поверхность световодов второго слоя. Наличие непрозрачной оплетки 21 позволяет увеличить расстояние от оптической сенсорной ткани 14 до печатной платы 22 с установленными на ней излучателями 3 и фотоприемниками 4.
Для исключения взаимного проникновения излучений, принятых боковой поверхностью определенного световода второго слоя, в соседний световод этого же слоя непрозрачная оплетка может также присутствовать и на неиспользуемых участках световодов второго слоя.
Повысить энергетическую эффективность оптической сенсорной ткани возможно, исключив оптические потери на неиспользуемых участках световодов, т.е. на подводящих участках от печатной платы с расположенными на ней излучателями и фотоприемниками до места расположения оптической сенсорной ткани. Потери возникают как в световодах 1 первого слоя, так и в световодах 2 второго слоя. В первом случае происходит паразитное излучение не в пределах расположения сенсорной ткани, уменьшающее мощность зондирующего излучения. Во втором случае излучение, переотраженное объектом контроля на боковую поверхность световода в пределах сенсорной ткани, переизлучается этой же поверхностью в процессе распространения излучения по сердцевине световода, уменьшая величину регистрируемого фотоприемником сигнала.
Для исключения этих потерь могут применяться так называемые оптические волокна торцевого свечения [34], либо известные одно- или многомодовые телекоммуникационные оптические волокна. В этих волокнах потери, связанные с излучением их боковой поверхности, сведены к минимуму.
На фиг. 20 иллюстрируется применение на неиспользуемых участках световодов первого и второго слоев волокон торцевого свечения 23. Для сопряжения волокон бокового свечения с волокнами торцевого свечения может использоваться сварное, либо клеевое соединение, обозначенное фрагментами 24.
Для повышения мощности оптического потока, излучаемого в сторону объекта контроля 6, могут использоваться группы из параллельно размещенных световодов первого слоя, как изображено на фиг. 21. Каждая группа 25 световодов 1 оптически связана с соответствующим излучателем 3. Благодаря увеличению эффективной площади излучаемой поверхности может быть соответственно увеличена мощность используемых излучателей 4.
Увеличение эффективной площади световодов второго слоя дает соответствующий прирост чувствительности к отраженному от объекта контроля 6 излучению. Как изображено на фиг. 22, для этого могут использоваться группы 26 из параллельно размещаемых световодов 2 второго слоя.
На фиг. 23 приведен пример исполнения оптической сенсорной ткани со световодами, размещенными группами 25 и 26, как в первом, так и во втором слоях.
Для повышения эффективности работы оптической сенсорной ткани может быть использована дополнительная фокусировка как зондирующего, т.е. направленного в строну возможного положения объекта контроля излучения, так и излучения, отраженного от объекта контроля.
Для этого может быть использована так называемая «линзовая матрица» (Lens Array), размещаемая над первым и вторым слоями световодов, центр каждой линзы которой перпендикулярен области пересечения световодов или их групп, находящихся в первом и втором слоях. Функционирование такого покрытия иллюстрируется на фиг. 24, на которой изображен его единичный фрагмент.
Наличие линзы 27, играющей роль оптического конденсора, с фокусным расстоянием ƒp, закрепленной на поглощающем излучение световодов 1 опорном покрытии 28, увеличивает эффективность оптического потока, т.е. повышает освещенность оптически сопряженной с ним подсвечиваемой площадки [35, стр. 138]. А именно, световой поток Ωр, с фрагмента σ, поверхности световода 1 первого слоя, трансформируется линзой 27 в световой поток Λр, который создает, на поверхности объекта контроля 6 пятно σΛ, с освещенностью большей, чем без конденсора в  раз [35, формула 181].
раз [35, формула 181].
Для исключения паразитных отражений оптических потоков световодов 1 опорное покрытие 28 должно быть выполнено из материала, поглощающего излучение, аналогичного поглощающей тканой прокладки 15, но большей толщины, определяемой фокусным расстоянием ƒp линзы 27.
Изображение σΛ фрагмента σ фокусируется линзой 27 на поверхности световода 2 второго слоя, в виде пятна χ, частично перегороженного световодом 1.
На фиг. 25 приведен возможный вид оптической сенсорной ткани, с использованием описанной выше «линзовой матрицы».
Чтобы исключить влияние паразитных засветок, которым может подвергаться оптическая сенсорная ткань, возможно использование амплитудной модуляции (AM) оптического излучения, с соответствующей обработкой сигналов фотоприемников, используя полосовую фильтрацию полезного сигнала на фоне помех.
Данный тип обработки нашел широкое применение в системах дистанционного инфракрасного (ИК) управления бытовой техникой. В этих системах используется модуляция ИК-излучения, при которой формируется последовательность импульсных посылок, с частотой импульсов в ней в диапазоне 30-56 кГц и 455 кГц, Для этих частот производятся микросхемы фотоприемников, со встроенным трансимпедансным усилителем, полосовым фильтром, схемой АРУ и AM детектором [36, 37]. Скорость обнаружения полезного сигнала для этих микросхем (tdon), согласно данным производителя, находится в пределах 15-36 мкС.
К примеру, если сенсорная ткань образована пересечением 100 световодов первого слоя и 64 световодов второго слоя, потребуется 100 тактов (по 1 на каждое волокно) формирования пачек импульсной последовательности частотой 455 кГц и длительностью 36 мкС (при использовании ИК-фотоприемника TSOP5700). Это дает период обновления информации не более 4 мС, т.е. частоту 250 Гц.
Использование быстродействующих светодиодов, PIN-фотодиодов и современных цифровых радиоприемных устройств позволяет поднять частоту обновления информации до десятков-сотен мегагерц, с соответствующим увеличением быстродействия предложенного устройства оптической сенсорной ткани.
Источники информации
1. Патент США №6826968 В2 от 07.12.2004 г.
2. Патент США №7276137 В2 от 02.10.2007 г.
3. Патент США №8837952 В2 от 16.09.2014 г.
4. Патент США №7630591 В2 от 08.12.2009 г.
5. Патент США №7444887 В2 от 04.11.2008 г.
6. Патент США №7477816 В2 от 13.01.2009 г.
7. Патент США №7627209 В2 от 01.12.2009 г.
8. Патент США №7496265 В2 от 24.02.2009 г.
9. Патент США №7805036 В2 от 28.09.2010 г.
10. Патент США №7817886 В2 от 19.10.2010 г.
11. Патент США №7957615 В2 от 07.06.2011 г.
12. Патент США №8111958 В2 от 07.02.2012 г.
13. Патент США №7809221 В2 от 05.10.2010 г.
14. Патент США №8717330 В2 от 06.05.2014 г.
15. Патент США №9164612 В2 от 20.10.2015 г.
16. Патент США №9127999 В2 от 08.09.2015 г.
17. Патент США №9080918 В2 от 14.06.2015 г.
18. Патент США №8826747 В2 от 09.09.2014 г.
19. Патент США № RE44856 Е от 22.04.2014 г.
20. Патент США № RE45578 Е от 23.06.2015 г.
21. Патент США №8411140 В2 от 02.04.2013 г.
22. Xiaoming Tao. Smart textile composites integrated with fibre optic sensors. Smart fibres, fabrics and clothing. Edited by Xiaoming Tao. Woodhead Publishing Ltd and CRC Press LLC, 2001.
http://textilelibrary.weebly.com/uploads/1/1/7/4/11749432/smart_fibres_fabrics_and_clothing_xiaoming_tao_2001.pdf
23. Winger, J.G., Kok-Meng Lee. Experimental investigation of a tactile sensor based on bending losses in fiber optics. 1988 IEEE International Conference on Robotics and Automation, Philadelphia, PA, Apr. 24-29, 1988, Proceedings. Volume 2 (A89-1190102-63). Washington, DC, Computer Society Press, 1988, p. 754-759. Research supported by Georgia Institute of Technology.
http://adsabs.harvard.edu/abs/1988roau....2..754W
24. D.T. Jenstrom, Chen-Lin Chen (1989) A fiber optic microbend tactile sensor array. Sensors and Actuators, Volume 20, Issue 3 (1 December 1989), Pages 239-248.
http://www.sciencedirect.com/science/article/pii/0250687489801222
25. K.Т.V. Grattan, Z.Y. Zhang, T. Sun. Luminescent optical fibers in sensing. Optical Fiber Sensor Technology Volume 4 of the series Optoelectronics, Imaging and Sensing. 1999, pp. 205-247.
http://link.springer.com/chapter/10.1007%2F978-94-017-2484-5_8
26. D. Kremenakova, J. Militky, B. Meryova, V. Ledl. Characterization of Side Emitting Polymeric Optical Fibres. Journal of Fiber Bioengineering & Informatics, 2012, 5(4): 423-431.
http://www.jfbi.org/EN/abstract/abstract17.shtml#
27. S.A. Kuznetsov, V.V. Kubarev, P.V. Kalinin, B.G. Goldenberg, V.S. Eliseev, E.V. Petrova, N.A. Vinokurov. Development of metal based quasi-optical selective components and their application in high-power experiments at Novosibirsk terahertz FEL. Proceedings of FEL 2007, Novosibirsk, Russia.
https://accelconf.web.cern.ch/accelconf/f07/PAPERS/MOPPH032.PDF
28. Arindam Das, Thomas M. Schutzius, Constantine M. Megaridis, Subhali Subhechha, Tao Wang, and Lei Liu. Quasi-optical terahertz polarizers enabled by inkjet printing of carbon nanocomposites. Applied Physics Letters 101, 243108 (2012).
http://scitation.aip.org/content/aip/journal/apl/101/24/10.1063/1.4770368
29. Техническая публикация фирмы Thorlabs Inc., USA. Wire Grid Polarizers on Glass Substrates.
https://www.thorlabs.com/newgrouppage9.cfm?objectgroup_id=5510
30. Техническая публикация фирмы TYDEX, РФ. ИК-поляризаторы.
http://www.tydexoptics.com/pdf/ru/IR_polarizers.pdf
31. Патент США №6208463 от 27.05.2001 г.
32. Г.С. Ландсберг. Оптика. Учебное пособие: для вузов. 6-е изд. Москва. Физматлит, 2003 г.
33. Ф. Крауфорд. Волны: Учебное руководство: Пер. с англ. 3-е изд., испр. Москва. Наука, 1984 г. (Берклеевский курс физики). - 512 с.
34. Техническая публикация фирмы Mica Lighting Company, Inc 717 S. State College Blvd., Fullerton, USA. End light multi-strand fiber optic cable.
http://www.micalighting.com/PDFs/fiber_optics/MICA%20%20Lighting%20-%20FO%20Fiber%20-%20End%20Light.10.pdf
35. И.Л. Сакин. Инженерная оптика. Ленинград. Машиностроение, 1976 г. - 288 стр.
36. Техническая публикация фирмы Vishay Intertechnology, Inc. USA.
http://www.mouser.com/ds/2/427/tsop62-346044.pdf
37. Техническая публикация фирмы Vishay Intertechnology, Inc. USA.
http://datasheet.octopart.com/TSOP5700TR-Vishay-datasheet-91528.pdf
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕНСОРНОЕ УСТРОЙСТВО С ИЗМЕРЕНИЕМ ДИНАМИЧЕСКОГО ВОЗДЕЙСТВИЯ | 2013 |
|
RU2542949C2 |
| ОПТИЧЕСКОЕ СЕНСОРНОЕ УСТРОЙСТВО | 2013 |
|
RU2542947C2 |
| УСТРОЙСТВО ДЛЯ СОЗДАНИЯ СЕНСОРНОЙ ПОВЕРХНОСТИ | 2012 |
|
RU2486575C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2012 |
|
RU2518404C2 |
| СЕНСОРНАЯ ПАНЕЛЬ НА ОСНОВЕ СВЕТОВОДОВ | 2013 |
|
RU2541849C2 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО ФОРМИРОВАНИЯ СЕНСОРНОЙ ПОВЕРХНОСТИ | 2014 |
|
RU2566958C1 |
| МОБИЛЬНОЕ УСТРОЙСТВО ДЛЯ ОРГАНИЗАЦИИ СЕНСОРНОЙ ПЛОСКОСТИ | 2014 |
|
RU2577467C1 |
| ОПТИЧЕСКОЕ СЕНСОРНОЕ УСТРОЙСТВО С ИЗМЕРЕНИЕМ СКОРОСТИ | 2014 |
|
RU2575388C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ БОКОВОГО АВТОМОБИЛЬНОГО СТЕКЛА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2556734C1 |
| УСТРОЙСТВО ДЛЯ ТРЕХМЕРНОЙ МАНИПУЛЯЦИИ | 2008 |
|
RU2362216C1 |
Изобретение относится к технике построения пользовательских интерфейсов, а также к робототехнике. Оптическая сенсорная ткань состоит из двух слоев, образованных перпендикулярными друг другу световодами бокового свечения, на боковую поверхность которых нанесено поляризационное покрытие, внутренняя структура которого симметрична относительно осевой линии световода. Сердцевины световодов одного из слоев оптически сопряжены с соответствующими излучателями, подключенными к выходам вычислителя, а сердцевины световодов второго слоя оптически сопряжены с соответствующими фотоприемниками, подключенными к входам вычислительного устройства. Технический результат изобретения заключается в повышении функциональных возможностей, а также в повышении надежности. 17 з.п. ф-лы, 25 ил. 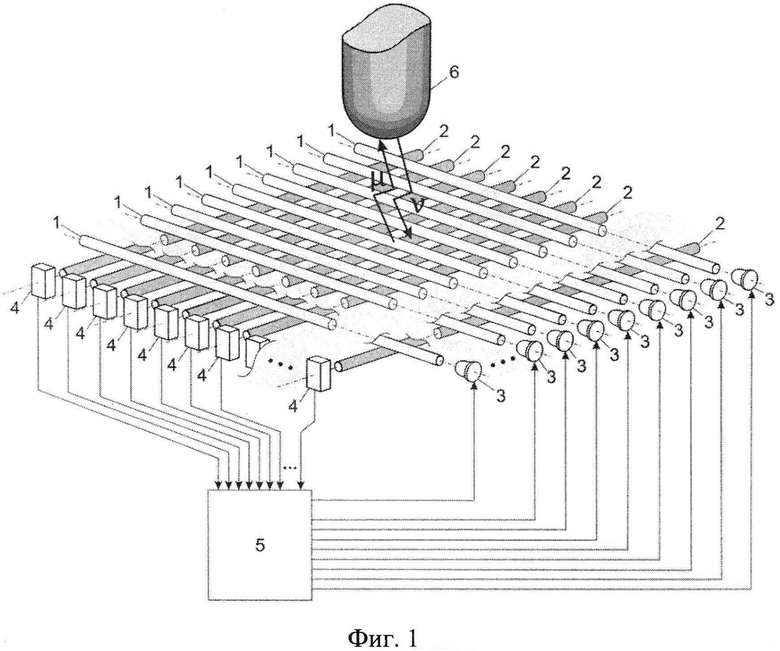
1. Устройство оптической сенсорной ткани, состоящей из двух взаимно перпендикулярных слоев световодов, причем сердцевины световодов первого из слоев оптически связаны с набором излучателей, подключенных к выходам вычислительного устройства, а сердцевины световодов второго слоя оптически связаны с набором фотоприемников, подключенных в свою очередь к входу вычислительного устройства, отличающееся тем, что на внешние поверхности световодов обоих слоев нанесено поляризующее покрытие так, что излучение с поверхности оптоволокон первого слоя, приобретая свойство поляризованного, распространяясь к объекту контроля, частично отражаясь от него и теряя при этом свойство поляризации, попадает на боковую поверхность световодов второго слоя и далее распространяется по их сердцевинам к соответствующим фотоприемникам, при этом вычислительное устройство последовательно включает каждый излучатель, считывает сигналы фотоприемников и по их значениям определяет положение объекта контроля, при этом излучение, падающее непосредственно на боковые поверхности световодов второго слоя от световодов первого слоя, гасится его поляризующим покрытием.
2. Устройство оптической сенсорной ткани по п. 1, отличающееся тем, что световоды обоих слоев выполнены на основе оптоволокна бокового свечения.
3. Устройство оптической сенсорной ткани по п. 2, отличающееся тем, что на боковую поверхность световодов нанесено поляризующее покрытие, структура которого симметрична относительно оптической оси световода.
4. Устройство оптической сенсорной ткани по п. 2 или 3, отличающееся тем, что на боковую поверхность световодов нанесено поляризующее покрытие в виде металлизированных полосок, параллельных его осевой линии.
5. Устройство оптической сенсорной ткани по п. 2 или 3, отличающееся тем, что на боковую поверхность световодов нанесено поляризующее покрытие в виде металлизированных полосок, перпендикулярных его осевой линии.
6. Устройство оптической сенсорной ткани по п. 2 или 3, отличающееся тем, что на боковую поверхность световодов нанесено поляризующее покрытие в виде треугольных насечек, параллельных его осевой линии, с металлизацией, нанесенной на одну из их граней.
7. Устройство оптической сенсорной ткани по п. 2 или 3, отличающееся тем, что на боковую поверхность световодов нанесено поляризующее покрытие в виде треугольных насечек, перпендикулярных его осевой линии, с металлизацией, нанесенной на одну из их граней.
8. Устройство оптической сенсорной ткани по п. 1, отличающееся тем, что содержит третий слой, выполненный из оптически поглощающего излучение материала, например тканного, размещенного под вторым слоем, причем первый слой размещен на стороне, обращенной в сторону объекта контроля.
9. Устройство оптической сенсорной ткани по п. 1, отличающееся тем, что между первым и вторым слоями находится третий слой, представляющий оптически непрозрачный для излучения материал, например тканный, причем первый и второй слой пересекаются на отдельных участках, образуя сквозные пересечения третьего слоя.
10. Устройство оптической сенсорной ткани по п. 1, отличающееся тем, что первый и второй слои переплетены между собой и образуют тканую структуру.
11. Устройство оптической сенсорной ткани по п. 1, отличающееся тем, что между световодами первого слоя проложено, по крайней мере, одно волокно, непрозрачное для излучений, формируемых на их боковых поверхностях.
12. Устройство оптической сенсорной ткани по п. 1, отличающееся тем, что часть поверхности световодов первого слоя покрыта непрозрачной оплеткой.
13. Устройство оптической сенсорной ткани по п. 1, отличающееся тем, что часть поверхности световодов второго слоя покрыта непрозрачной оплеткой.
14. Устройство оптической сенсорной ткани по п. 1, отличающееся тем, что между торцами световодов первого слоя и излучателями находится оптически сопряженное с ними оптоволокно торцевого свечения.
15. Устройство оптической сенсорной ткани по п. 1, отличающееся тем, что между торцами световодов второго слоя и фотоприемниками находится оптически сопряженное с ними оптоволокно торцевого свечения.
16. Устройство оптической сенсорной ткани по п. 1, отличающееся тем, что каждый излучатель оптически связан с более чем одним световодом первого слоя.
17. Устройство оптической сенсорной ткани по п. 1, отличающееся тем, что каждый фотоприемник оптически связан с более чем одним световодом второго слоя.
18. Устройство оптической сенсорной ткани по п. 1, отличающееся тем, что дополнительно содержит поглощающее излучение покрытие со вскрытиями над точками пересечений световодов первого и второго слоев и закрепленными над ними линзами, концентрирующими излучения световодов первого слоя и фокусирующими отраженный от объекта контроля световой поток на световодах второго слоя.
| Markus Rothmaier et al | |||
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| JP 2003216070 A, 30.07.2003 | |||
| WO 2007078319 A3, 12.07.2007 | |||
| US 0005913245 A1, 15.06.1999 | |||
| US 20110058767 A1, 10.03.2011. | |||

