Изобретение относится к области автоматического управления технической системой, в которой присутствие человека-оператора по технологическим условиям ограничено или невозможно, и может быть использовано для создания интеллектуальных систем автоматического управления техническими системами, содержащих независимо управляемые подсистемы.
Известна реализация способа управления технической системой [Кудряшов B.C., Битюков В.К., Рязанцев С.В., Алексеев М.В. ГОУ Воронежская государственная технологическая академия (г. Воронеж). Адаптивная цифровая комбинированная система управления нестационарными технологическими объектами. Патент RU 2211470, опубл. 27.08.2003, бюл. №24], предназначенного для оптимизации канала обмена данными с объектами управления, находящимися в нестационарных состояниях. При этом оценивается сложность технологического процесса в каждом объекте управления и предлагается решение задачи оптимизации системы управления путем ввода цифрового регулятора с гибкой внутренней настройкой.
Недостатками данного способа являются: невозможность обеспечения централизованного управления всех узлов технической системы; необходимость ручной настройки цифрового регулятора при каждом изменении набора объектов управления и их функций; низкая скорость выполнения программных операций.
Наиболее близким к предлагаемому решению является способ управления технической системой [Акиньшина Г.Н., Селифанов В.А. ФГВОУ ВПО Военный авиационный инженерный университет (г. Воронеж) Министерства обороны Российской Федерации. Способ двухуровневого управления и система для его осуществления (варианты). Патент RU 2487384 C1, опубл. 10.07.2013, бюл. №19], предназначенный повышения автоматизации процессов управления в технической системе путем ввода программных процедур принятия решений. При этом предлагается иметь в составе технической системы несколько независимых компьютеров управления с разделенными каналами контроля управляемых подсистем, выполняющих в том числе процедуру диагностики состояния всех подключенных устройств.
Недостатками данного способа являются: отсутствие программных функций соблюдения стабильности поведения компьютера управления, что, следовательно, исключает возможность ситуации его перегрузки со стороны управляемых узлов и последующего выхода из строя; исключение нестационарного протекания технологического процесса в управляемых подсистемах и, следовательно, увеличение уровня потребления ресурсов компьютера управления; отсутствие канала обратной связи изменения параметров управляемых узлов.
Технической задачей является оптимизация процесса распределения ресурсов управляющего компьютера(ов) между параллельно включенными подсистемами в момент нестационарного протекания технологического процесса в подсистемах. Эта задача достигается тем, что в основной код управления технической системой вводятся семь программных процедур, нацеленных на соблюдение штатного состояния работы управляющего компьютера(ов), ограничение канала передачи данных с подсистемами в момент высокой нагрузки на управляющий компьютер(ы), расчет оптимального уровня потребления ресурсов управляющего компьютера(ов) для каждой подсистемы.
Технический результат заключается в том, что за счет оптимизации программного кода управления удается повысить срок службы управляющего компьютера(ов) и технической системы в целом, а также снизить число ошибок управления, связанных с перегрузкой управляющего компьютера(ов), и сократить затраты на необходимость организации более сложных схем управления.
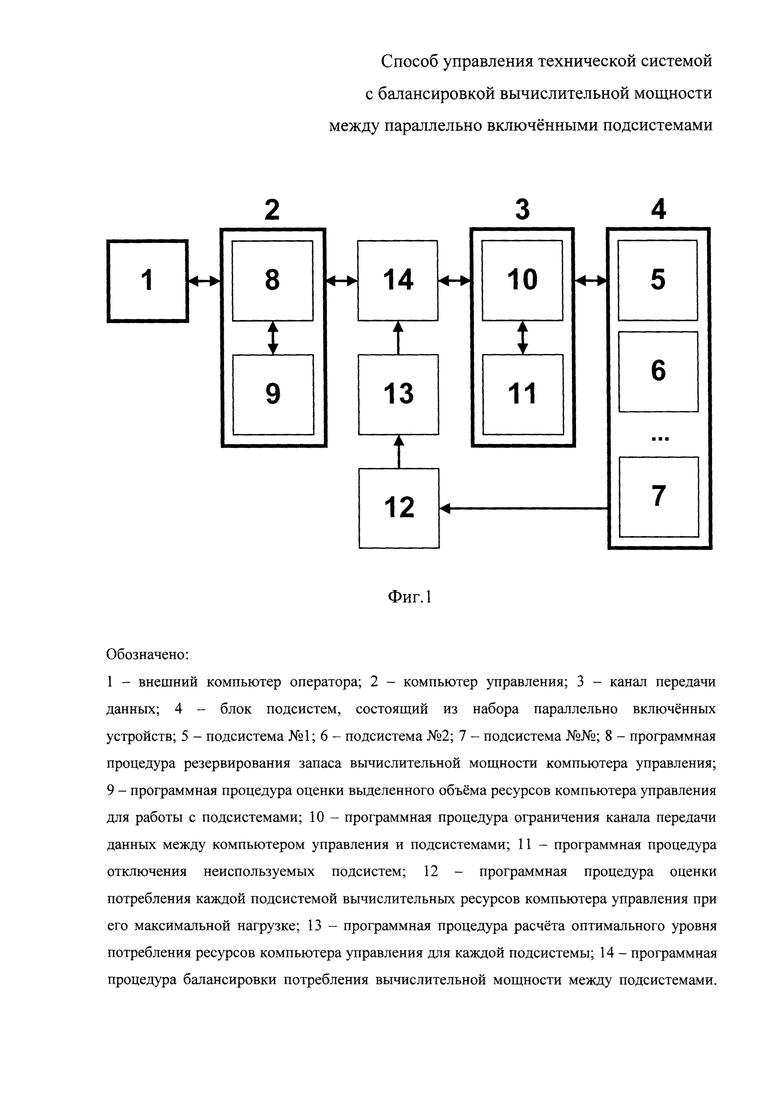
Сущность изобретения поясняется чертежом (фиг. 1), на котором изображена функциональная схема процесса оптимизации системы управления технической системы.
На схеме обозначено:
1 - внешний компьютер оператора;
2 - компьютер управления;
3 - канал передачи данных;
4 - блок подсистем, состоящий из набора параллельно включенных устройств;
5 - подсистема №1;
6 - подсистема №2;
7 - подсистема №№;
8 - программная процедура резервирования запаса вычислительной мощности компьютера управления;
9 - программная процедура оценки выделенного объема ресурсов компьютера управления для работы с подсистемами;
10 - программная процедура ограничения канала передачи данных между компьютером управления и подсистемами;
11 - программная процедура отключения неиспользуемых подсистем;
12 - программная процедура оценки потребления каждой подсистемой вычислительных ресурсов компьютера управления при его максимальной нагрузке;
13 - программная процедура расчета оптимального уровня потребления ресурсов компьютера управления для каждой подсистемы;
14 - программная процедура балансировки потребления вычислительной мощности между подсистемами.
Техническая система, на базе которой проводится оптимизация системы управления, содержит компьютер управления (или группу из нескольких устройств, включенных в схему резервирования или параллельной работы) 2, канал передачи данных 3, блок подсистем 4, состоящий из набора независимых устройств (или групп взаимосвязанных устройств с единым технологическим процессом), каждый из которых с 5 по 7 имеет собственный технологический процесс. Управление технической системой и загрузка базового алгоритма работы в компьютер управления 2 выполняется при помощи внешнего компьютера оператора 1.
Схема оптимизации работает следующим образом.
Внешний компьютер оператора 1 загружает в компьютер управления 2 базовый алгоритм работы, перед началом исполнения которого проводится программная процедура 8 резервирования запаса вычислительной мощности компьютера управления 2. Далее запускается программная процедура 9 оценки выделенного объема ресурсов компьютера управления для работы с подсистемами с 5 по 7. Процедуры 8 и 9 выполняются однократно в начале функционирования технической системы и необходимы для соблюдения штатного состояния работы 2, а также формирования запаса вычислительной мощности в 2 для проведения внутренних диагностических процедур без отбора вычислительных ресурсов от 4. Затем запускается программная процедура 14 балансировки потребления вычислительной мощности 2 между всеми подсистемами, входящими в состав технической системы. Задача программной процедуры 14 - обеспечение оптимального распределения оставшихся (незарезервированных) после процедуры 9 вычислительных ресурсов 2 между всеми активными подсистемами, входящими в 4, а также перераспределение вычислительных ресурсов 2 при включении новых подсистем (либо при выходе ранее функционирующих подсистем из строя). При этом не допускается ситуация, где одна из подсистем отбирает максимальный объем вычислительных ресурсов (вследствие чего в оставшихся подсистемах не может быть проконтролирован технологический процесс). Программная процедура 14 формирует команды управления программной процедурой 10 ограничения канала передачи данных между компьютером управления и подсистемами. Группа участвующих в технологическом процессе параллельно включенных подсистем, входящих в 4, формирует набор статистических данных о необходимости увеличения вычислительной мощности или возможности сокращения таковой. При этом все подсистемы суммарно потребляют весь доступный после проведения программной процедуры 9 объем незарезервированной вычислительной мощности компьютера управления 2. На основе анализа состояния и технических параметров, полученных от всех подсистем, входящих в 4, исполняется программная процедура 12 оценки потребления каждой подсистемой вычислительных ресурсов компьютера управления 2 при его максимальной нагрузке. Завершается цикл оптимизации запуском программной процедуры 13 расчета оптимального уровня потребления ресурсов компьютера управления для каждой подсистемы.
Если в базовом алгоритме работы технической схемы заявлено о приоритетности технологического процесса для одной или нескольких подсистем (либо групп взаимосвязанных устройств) либо описана методика и условия установки данной метки, то в течение работы технической системы может быть выполнена программная процедура 11 отключения оставшихся неиспользуемых подсистем в пользу использования большего количества ресурсов компьютера управления 2 в приоритетных узлах и подсистемах. Программная процедура 11 может быть запущена в том числе с целью освобождения канала управления и последующей балансировки вычислительной мощности 2, если одна из подсистем закончила технологический процесс или вышла из строя. Программные процедуры 10, 11, 12, 13, 14 выполняются циклически в процессе работы технической системы.
Частота выполнения цикла оптимизации системы управления путем исполнения программных процедур 11, 12, 13, 14 определяется стационарностью технологического процесса в каждой подсистеме, а также параметрами периодичности диагностики оборудования, которые задает базовый алгоритм работы технической системы, или выполняется по команде внешнего компьютера оператора 1. Перед использованием схемы оптимизации техническая система не менее десяти раз запускается в режиме свободного потребления вычислительной мощности всеми подсистемами, входящими в блок 4 для формирования статистических данных при помощи программной процедуры 12.
Под ограничением потребления вычислительных ресурсов со стороны подсистемы, исполняемых программной процедурой 10, понимается аппаратно-программная блокировка выделенного канала передачи данных 3 для отдельной подсистемы, не имеющей метки приоритетности технологического процесса. При этом снижается частота обмена данными в канале передачи данных 3 между отдельно взятой подсистемой (или группой взаимосвязанных с единым технологическим процессом) и компьютером управления 2 при достижении граничного уровня потребления вычислительных ресурсов. В случае если отдельно выбранная подсистема (или группа взаимосвязанных подсистем) в процессе функционирования имеет потребляемый объем вычислительных ресурсов 2 выше порога блокировки, то ограничение частоты обмена данными в соответствующем канале передачи данных 3 не происходит. Программная процедура 14 позволяет оптимально распределить доступную вычислительную мощность 2 между всеми подсистемами, входящими в 4, с учетом их текущего уровня потребления и обеспечения стабильного состояния работы технической системы. При этом исключается случай, при котором одна или несколько подсистем потребляют всю доступную вычислительную мощность 2, вводя его в режим пиковой нагрузки, блокируя работу 3 с остальными подсистемами. Программная процедура 14 нацелена на поддержание активности всех подсистем (и их групп), входящих в 4.
Если в процессе работы технической системы отдельно выбранная подсистема (или группа взаимосвязанных подсистем с единым технологическим процессом) не используют выделенную программными процедурами 9, 12, 13, 14 вычислительную мощность компьютера управления 2 в полной мере, то она может быть повторно перераспределена между наиболее активными подсистемами, входящими в блок подсистем 4. Вычисление уровня потребления вычислительных ресурсов проводится последовательным тестированием всех устройств, входящих в блок подсистем 4, при котором все остальные узлы технической системы не используются. Если каждая из подсистем (или группа взаимосвязанных подсистем с единым технологическим процессом) способна в обычном режиме работы задействовать все доступные вычислительные ресурсы компьютера управления 2, то программная процедура 14 выполняется с учетом критерия равного разделения вычислительной мощности между всеми подсистемами, входящими в 4. Установка значений максимального порога отбора вычислительной мощности 2 проводится в автоматическом режиме через алгоритм математического расчета, на основе статистики, полученной при исполнении процедуры 12.
Под подсистемами понимаются технические узлы, модули, системы с централизованным управлением от компьютера управления. Каждая подсистема способна выполнять узкоспециализированные задачи и может функционировать вне зависимости от других устройств, входящих в состав технической системы.
Под компьютером управления понимается классическая фоннеймовская архитектура компьютера, содержащая набор базовых блоков ОЗУ, ПЗУ, ЦП. В качестве компьютера управления может быть рассмотрена любая вычислительная система, имеющая независимый ЦП и ПЗУ.
Под вычислительной мощностью компьютера управления (производительность компьютера) понимается количественная характеристика скорости выполнения определенных операций на компьютере. Она основана на расчете количества используемых вычислительных ресурсов в компьютере управления (оценка быстродействия ЦП и ОЗУ). Значение производительности компьютера управления в мировой практике принято оценивать в гигафлопсах (GFLOPS).
Проведенная оптимизация кода управления путем ввода семи программных процедур позволяет обеспечить: стабильность работы каналов передачи данных между всеми подсистемами (или группами взаимосвязанных подсистем с единым технологическим процессом) и компьютером управления (или группами из нескольких устройств, включенных в схему резервирования или параллельной работы), исключая возможность его отключения со стороны других узлов; функционирование компьютера управления в режиме штатной нагрузки с запасом вычислительной мощности для проведения внутренних диагностических процедур; увеличение скорости исполнения технологического процесса в каждой отдельной подсистеме и получение доступа к необходимому объему ресурсов компьютера управления при нестационарном протекании технологических процессов.
Таким образом, благодаря применению способа оптимизации удается: повысить срок службы компьютера управления и технической системы в целом; снизить число ошибок управления, связанных с перегрузкой компьютера управления; сократить затраты на необходимость организации более сложных схем управления технической системы; повысить управляемость технической системы при протекании нестационарного технологического процесса в управляемых подсистемах; реализовать архитектуру технической системы, содержащую параллельно включенные независимые подсистемы (или группы взаимосвязанных подсистем с единым технологическим процессом) для ее последующего применения в технике.
Изобретение относится к автоматическим системам управления. В способе управления технической системой с балансировкой вычислительной мощности между параллельно включенными подсистемами, содержащей управляющий компьютер и набор независимых параллельно включенных подсистем, способных исполнять независимые технологические процессы, в основной код управления системой вводят семь программных процедур. Программные процедуры нацелены на соблюдение штатного состояния работы управляющего компьютера, на ограничение канала передачи данных с подсистемами в момент высокой нагрузки на управляющий компьютер, на расчет оптимального уровня потребления ресурсов управляющего компьютера для каждой подсистемы. Повышается срок службы управляющего компьютера. 1 ил.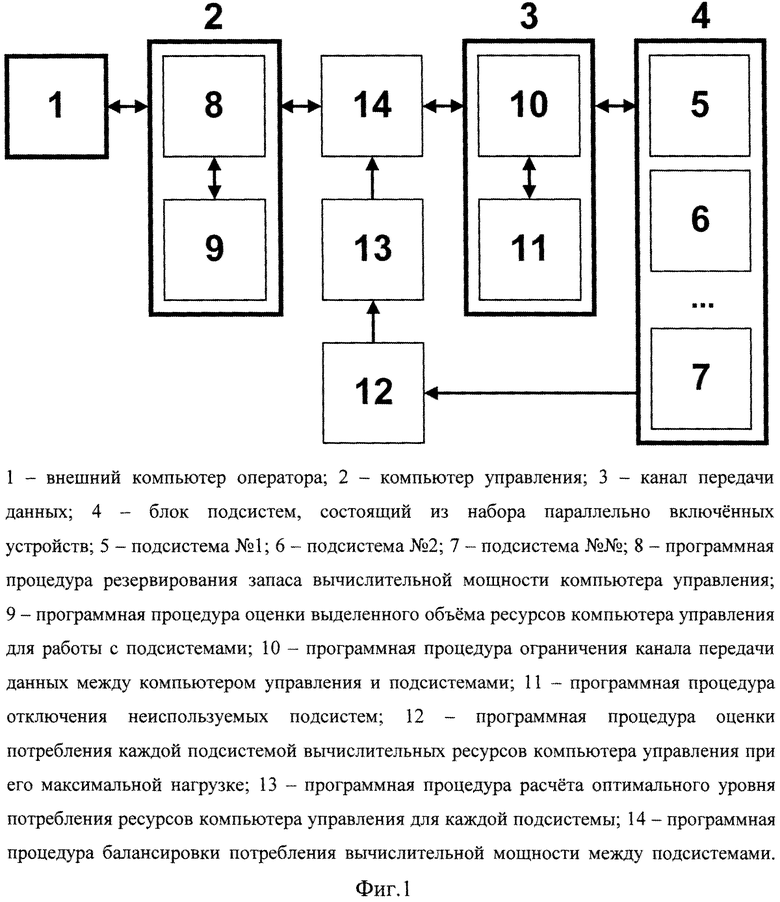
Способ управления технической системой с балансировкой вычислительной мощности между параллельно включенными подсистемами, содержащей управляющий(ие) компьютер(ы) и набор независимых параллельно включенных подсистем, способных исполнять независимые технологические процессы, отличающийся тем, что в основной код управления технической системой вводятся семь программных процедур, нацеленных на соблюдение штатного состояния работы управляющего(их) компьютера(ов), ограничение канала передачи данных с подсистемами в момент высокой нагрузки на управляющий(ие) компьютер(ы), расчет оптимального уровня потребления ресурсов управляющего(их) компьютера(ов) для каждой подсистемы.
| Способ получения щелочно-двукальциевой соли фосфорной кислоты | 1925 |
|
SU6307A1 |
| ИЗБЫТОЧНАЯ СИСТЕМА АВТОМАТИЗАЦИИ ДЛЯ УПРАВЛЕНИЯ ТЕХНИЧЕСКИМ УСТРОЙСТВОМ, А ТАКЖЕ СПОСОБ ЭКСПЛУАТАЦИИ ПОДОБНОГО ТИПА СИСТЕМЫ АВТОМАТИЗАЦИИ | 2003 |
|
RU2362199C2 |
| СПОСОБ ЧЕТЫРЕХУРОВНЕВОГО УПРАВЛЕНИЯ ТЕХНИЧЕСКИМИ СРЕДСТВАМИ И СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2453894C1 |

