Предлагаемое изобретение относится к области автоматического управления технической системой, в которой присутствие человека-оператора по технологическим условиям ограничено или невозможно, и может быть использовано для создания интеллектуальных систем автоматического управления техническими системами, содержащих независимо управляемые подсистемы.
Известна реализация способа управления технической системой [Акиньшина Г.Н., Селифанов В.А. ФГВОУ ВПО Военный авиационный инженерный университет (г. Воронеж) Министерства обороны Российской Федерации. Способ четырехуровневого управления техническими средствами и система управления для его осуществления. Патент RU 2453894 C1, опубл. 20.06.2012], предназначенного для повышения автоматизации процессов управления в технической системе путем ввода программных процедур принятия решений. При этом предлагается иметь в составе технической системы несколько независимых компьютеров управления с разделенными каналами контроля управляемых подсистем и выполняющих в том числе процедуру диагностики состояния всех подключенных устройств.
Недостатками данного способа являются: отсутствие программных функций соблюдения стабильности поведения компьютера управления (что, следовательно, исключает возможность ситуации его перегрузки со стороны управляемых узлов и последующего выхода из строя); исключение ситуации нестационарного протекания технологического процесса в управляемых подсистемах (и, следовательно, увеличении уровня потребления ресурсов компьютеров управления); отсутствие программных процедур по перераспределению нагрузки между параллельно включенными компьютерами управления; очевидна значительная временная задержка при формировании сигнала отклика от управляемой подсистемы к компьютеру управления (что обусловлено сложностью организации каналов передачи данных).
Наиболее близким к предлагаемому решению является способ управления технической системой [Клейер Дитер, От Вольфганг Сименс Акциенгезелльшафт. Избыточная система автоматизации для управления техническим устройством, а также способ эксплуатации подобного типа системы автоматизации. Патент RU 2362199 C1, опубл. 17.11.2003], предназначенного для повышения автоматизации процессов управления в технической системе путем ввода двух независимых приборов автоматизации, снабженных общем блоком памяти. Таким образом, приборы автоматизации имеют непосредственный доступ к общей базе данных, и в случае неисправности главного прибора автоматизации происходит плавное переключение на резервный прибор автоматизации.
Недостатками данного способа являются: отсутствие программных перераспределение каналов управления управляемыми устройствами и подсистемами между приборами автоматизации; приборы автоматизации имеют общий блок памяти, при перегрузке которого управление технической системой ограниченно, а при выходе из строя - невозможно; диагностика технической системы не предусматривает анализ состояния управляемых устройств и подсистем; не учитывается ситуация с нестационарным протеканием технологического процесса в управляемых подсистемах.
Технической задачей является оптимизация процесса управления технической системы с параллельно включенными компьютерами управления, имеющими равные технические характеристики, путем перераспределения доступной вычислительной мощности между независимыми подсистемами (или их группами) с учетом протекания в них нестационарных технологических процессов.
Эта задача достигается тем, что в основной код управления технической системой вводятся группа, состоящая из трех программных процедур (1 - перераспределение вычислительной мощности компьютеров управления между всеми подсистемами; 2 - оценка необходимого уровня потребления вычислительных ресурсов компьютеров управления со стороны каждой отдельной подсистемы; 3 - оценка состояния компьютера управления), нацеленных на: недопущение выхода компьютеров управления из штатного состояния работы; мониторинг уровня потребления вычислительных ресурсов со стороны подсистем; реализацию функции оптимального перераспределения каналов передачи данных всех подсистем исходя из особенностей протекания технологического процесса в каждой из них.
Технический результат заключается в том, что за счет оптимизации программного кода управления удается повысить срок службы управляющих компьютеров и технической системы в целом, снизить число ошибок управления, связанных с перегрузкой управляющих компьютеров, а также сократить затраты на необходимость организации более сложных схем управления.
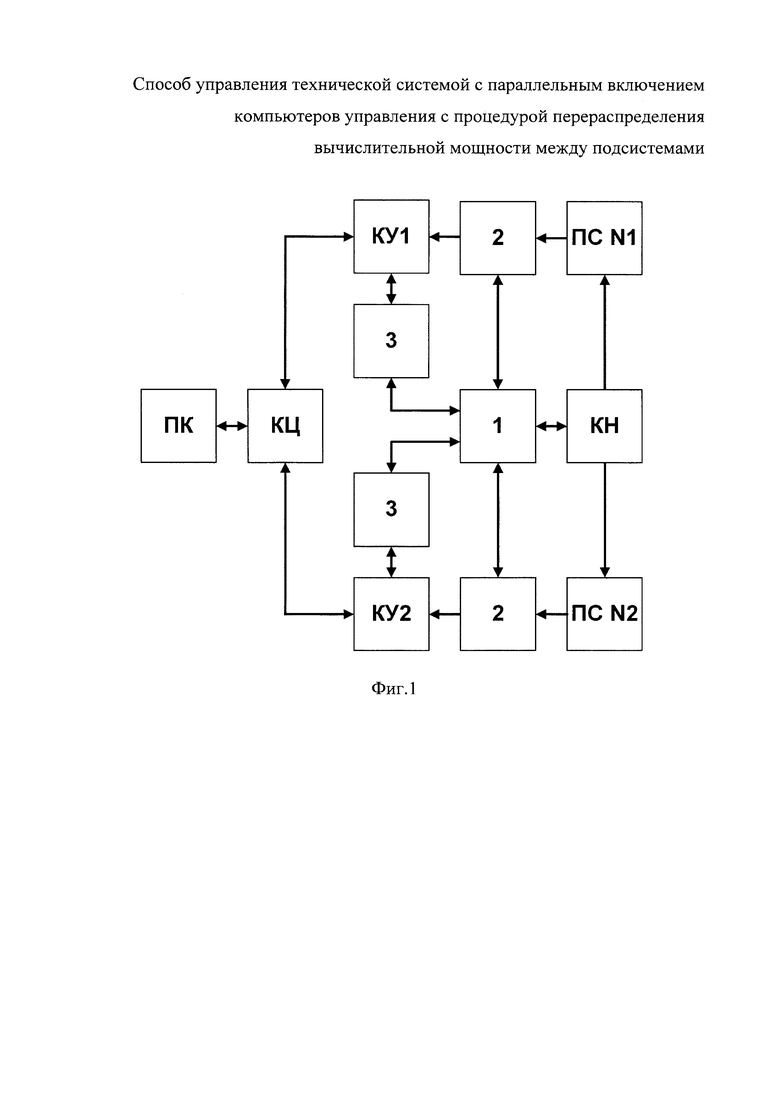
Сущность изобретения поясняется чертежом (фиг. 1), на котором изображена функциональная схема процесса оптимизация процесса управления технической системы.
Техническая система (ТС), на базе которой проводится оптимизация системы управления, содержит: два параллельно включенных компьютера управления (КУ1 и КУ2), имеющих равные технические характеристики; канал передачи данных (КН) между каждым отдельным КУ и соотнесенными с ним подсистемами; две группы подсистем (ПС №1 и ПС №2), каждая из которых состоит из самостоятельных функциональных подсистем (ПС), способных иметь независимый технологический процесс. Управление ТС и загрузка базового алгоритма работы в каждый КУ выполняется при помощи команд от внешнего компьютера оператора ПК. Канал обмена данными между ПК и параллельно включенными КУ1 и КУ2 осуществляется через сетевой концентратор (КЦ).
На схеме (фиг. 1) обозначено:
ПК - внешний компьютер оператора;
КЦ - сетевой концентратор;
КУ1 - компьютер управления №1;
КУ2 - компьютер управления №2;
КН - канал передачи данных;
ПС №1 - группа подсистем №1;
ПС №2 - группа подсистем №2;
1 - программная процедура перераспределения вычислительной мощности компьютеров управления между всеми подсистемами;
2 - программная процедура оценки необходимого уровня потребления вычислительных ресурсов компьютеров управления со стороны каждой отдельной подсистемы;
3 - программная процедура оценки состояния компьютера управления.
Схема оптимизации работает следующим образом.
ПК загружает в КУ1 и КУ2 базовый алгоритм работы ТС, перед началом исполнения которого запускается программная процедура 1 перераспределения вычислительной мощности компьютеров управления между всеми подсистемами. Первый запуск процедуры 1 позволяет формально соотнести КН всех ПС между КУ. До старта основного протокола работы ТС каждая из ПС не менее десяти раз проходит тестирование для определения достаточного уровня потребления ресурсов КУ. Результат тестирования позволяет соотнести все КН между включенными КУ согласно принципу равного распределения ресурсов и недопущения ситуаций, при которых один из КУ будет иметь большую загрузку, чем второй параллельно с ним включенный. Кроме того, исключается ситуация, при которой любой из КУ переходит в нештатный режим функционирования (например, перегрузка ОЗУ или пиковая нагрузка ЦП). После формального соотнесения КН всех ПС между КУ запускается основной алгоритм работы ТС. Программная процедура 1 запускается повторно и выполняет программное перераспределение КН всех ПС между доступными КУ с учетом запросов со стороны ПС необходимых объемов вычислительных ресурсов.
Далее запускается программная процедура 2 оценки необходимого уровня потребления вычислительных ресурсов компьютеров управления со стороны каждой отдельной ПС. При этом каждая из ПС формирует отчет о состоянии протекания в ней технологического процесса вне зависимости от того, является ПС самостоятельно действующей или же объединена с другими ПС в технологическую схему. Программная процедура 2 формирует запрос о необходимости увеличения объема вычислительной мощности для функционирования отдельно взятой ПС в случае, когда все доступные ресурсы каждого из КУ уже используются, и дальнейший отбор может допустить возникновение нештатного состояния работы. В этом случае программная процедура 1 на основе оценочных данных от ПС либо выполняет запрос об увеличении ресурсов путем уменьшения объема потребления менее значимой ПС, либо формирует команды о возможном снижении скорости протекания технологического процесса в ПС аппаратными методами.
Перераспределение каналов управления всеми ПС между КУ проводится из учета доступной вычислительной мощности и состояния работы КУ, которое выполняет программная процедура 3 оценки состояния компьютера управления. Программная процедура 3 запускается в момент начала тестирования ПС до выполнения основного протокола работы ТС и отвечает за установление порога потребления вычислительных ресурсов (штатное состояние работы), а также однократно (в момент старта ТС) выполняет процедуру формирования запаса вычислительной мощности КУ. Запас ресурсов каждого из КУ необходим для проведения внутренних диагностических процедур без отбора вычислительных ресурсов от ПС. Установка значений максимального порога отбора вычислительной мощности КУ проводится в автоматическом режиме через алгоритмы математического расчета, на основе статистики, полученной при исполнении процедуры 2 и заявленных технических требований к КУ от производителя (штатное состояние работы).
Программные процедуры 1, 2, 3 выполняются в течение всего периода функционировании ТС с частотой, указанной в базовом алгоритме работы, загруженном ПК перед запуском ТС. Частота выполнения диагностических процедур оценки состояния узлов ТС и программных процедур 1, 2, 3 определяется базовым протоколом работы ТС и может быть изменена по команде ПК. Последнее проведенное перераспределение КН всех доступных ПС между параллельно работающими КУ с учетом приоритетности технологических процессов обнуляется во время нового старта ТС.
В случае если в одной из ПС или группе таковых наблюдается нестационарное протекание технологического процесса, то благодаря программной процедуре 1 между параллельно включенными КУ может быть реорганизованы каналы управления таким образом, что сохраняется принцип равного расходования ресурсов и недопущение перехода в состояние нештатного функционирования любого из КУ. Процедура перераспределения может быть выражена в переключении КН более ресурсоемких ПС на один из КУ, а всех оставшихся (менее ресурсоемких) ПС на другой. В случае, если один из КУ в процессе функционирования ТС выходит из строя, то все КН доступными ПС переносятся на оставшийся функционирующий КУ.
Аналогичная ситуация возможна при резервировании одного из КУ по команде ПК. В случае, когда ТС состоит только из одной ПС (либо остальные ПС по команде ПК ограничены или остановлены), то оба КУ могут в параллельном режиме обрабатывать данные от ПС. Если же выходит из строя одна из ПС (либо группа таковых), то потребляемые ресурсы КУ высвобождаются и могут быть использованы программной процедурой 1 для оставшихся ПС. Если в базовом алгоритме работы ТС установлена приоритетность технологического процесса, протекающего в одной ПС (или группе таковых), то при выполнении программной процедуры 1 будет учитываться возможность освобождения к ним большего объема вычислительных ресурсов от КУ и ограничения каналов потребления в тех ПС, где технологический процесс протекает менее значимо. Ограничение может быть выражено в изменении частоты обмена данными между КУ и ПС (или группами таковых) либо в остановке работы менее значимых технологических процессов. Приоритетность технологического процесса в любой ПС (или группе таковых) может быть дополнительно введена командой ПК во время исполнения основного алгоритма работы.
Если же во время функционирования ТС выявлены ошибки выполнения запросов от одного из КУ, то программная процедура 3 формирует команды для программной процедуры 1 о перенесении ряда КН от ПС на второй КУ. Если же ошибки управления сохраняются и не связаны с перегрузкой КУ, то при помощи программных процедур 1 и 3 проводится полное отключение КУ и начинаются диагностические работы по выявлению неполадок. Если программные диагностические процедуры не позволяют выявить причину нестабильного поведения КУ, то он отключается в ТС, а каналы управления всеми ПС переносятся на функционирующий КУ.
Предложенный способ предусматривает возможность добавления новых КУ и ПС во время работы ТС. Если через КЦ включается один КУ путем последовательного присоединения к уже функционирующему, то последний может перенести часть каналов управления ПС на нововведенный. Если же новый КУ включается в схему параллельно к двум уже функционирующим в параллельной схеме соединения, то оператору необходимо выполнить команды инициализации устройства и провести программные процедуры 1 и 3. Аналогично может быть введена в состав ТС новая ПС или группа таковых. Однако, если в базовом алгоритме работы ТС установлена приоритетность всех уже действующих ПС, то потребление вычислительных ресурсов со стороны новых включенных ПС определятся исключительно возможностью освобождения вычислительных ресурсов от КУ при помощи программных процедур 1, 2, 3. В ином случае, новые ПС, включенные в работу, не могут быть использованы в ТС без отмены приоритета технологического процесса одной или нескольких ранее действующих ПС дополнительной командой оператора.
Под ПС понимаются технические узлы, модули, системы с централизованным управлением от КУ. Каждая ПС способна выполнять узкоспециализированные задачи и может функционировать вне зависимости от других ПС в ТС. Под КУ понимается классическая фоннеймовская архитектура компьютера, содержащая набор базовых блоков ОЗУ, ПЗУ, ЦП. В качестве КУ может быть рассмотрена любая вычислительная система, имеющая независимый ЦП и ПЗУ. Под вычислительной мощностью КУ (производительность компьютера) понимается количественная характеристика скорости выполнения определенных операций на компьютере. Она основана на расчете количества используемых вычислительных ресурсов в КУ (оценка быстродействия ЦП и ОЗУ). Значение производительности КУ в мировой практике принято оценивать в Гигафлопсах (GFLOPS).
Проведенная оптимизация кода управления путем ввода ряда программных процедур позволяет обеспечить: функционирование КУ в режиме штатной нагрузки с запасом вычислительной мощности для проведения внутренних диагностических процедур; увеличить скорость исполнения технологического процесса в ПС и получить доступ к необходимому объему ресурсов КУ при нестационарном технологическом процессе.
Таким образом, благодаря применению способа оптимизации удается: повысить срок службы КУ и ТС в целом; снизить число ошибок управления, связанных с перегрузкой КУ; сократить затраты на необходимость организации более сложных схем управления ТС; повысить управляемость ТС при протекании нестационарного технологического процесса в управляемых ПС; организовать сложные ТС, содержащие параллельно включенные независимые ПС (или их группы).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления технической системой с параллельным включением компьютеров управления с процедурой интеллектуального выбора управляющего устройства | 2015 |
|
RU2622661C2 |
| Способ управления технической системой с параллельным включением компьютеров управления с внешним воздействием | 2015 |
|
RU2645176C2 |
| Способ управления технической системой с балансировкой вычислительной мощности между параллельно включёнными подсистемами | 2015 |
|
RU2616480C2 |
| ПРОГРАММНО-АППАРАТНЫЙ КОМПЛЕКС АРХИТЕКТУРЫ ЕДИНОЙ СЕРВЕРНОЙ ПЛАТФОРМЫ ДЛЯ ПОДСИСТЕМ ЦИФРОВЫХ ПОДСТАНЦИЙ 35 - 110 КВ С ИСПОЛЬЗОВАНИЕМ СРЕДСТВ ВИРТУАЛИЗАЦИИ | 2020 |
|
RU2762950C1 |
| ИНФОРМАЦИОННО-АНАЛИТИЧЕСКАЯ СИСТЕМА НОРМИРОВАНИЯ И ОПТИМИЗАЦИИ ВЫРАБОТКИ И ПОТРЕБЛЕНИЯ ТОПЛИВА И ЭНЕРГОНОСИТЕЛЕЙ НА ПРЕДПРИЯТИИ | 2011 |
|
RU2465639C1 |
| Способ управления управляющей системой корабельного комплекса связи | 2018 |
|
RU2716827C2 |
| Геопортальная платформа для управления пространственно-распределенными ресурсами | 2023 |
|
RU2818866C1 |
| СИСТЕМА И СПОСОБ ПРЕДОСТАВЛЕНИЯ ИНФОРМАЦИИ И УСЛУГ ПОЛЬЗОВАТЕЛЯМ | 2014 |
|
RU2614537C2 |
| Блочная микропроцессорная централизация (БМПЦ) | 2023 |
|
RU2803696C1 |
| СПОСОБ ПОСТРОЕНИЯ РАСПРЕДЕЛЕННОЙ ИНФОРМАЦИОННОЙ СИСТЕМЫ | 2018 |
|
RU2699683C1 |
Изобретение относится к автоматизированным системам управления. Способ управления технической системой с параллельным включением компьютеров управления с процедурой перераспределения вычислительной мощности между подсистемами, содержащими параллельно включенные компьютеры управления и группы функционирующих подсистем, заключается в том, что в основной код управления технической системой вводится группа, состоящая из программных процедур. Первая процедура перераспределяет вычислительную мощность компьютеров управления между всеми подсистемами. Вторая процедура оценивает необходимый уровень потребления вычислительных ресурсов компьютеров управления со стороны каждой отдельной подсистемы. Третья процедура оценивает техническое состояние компьютера управления. Повышается срок службы управляющих компьютеров. 1 ил.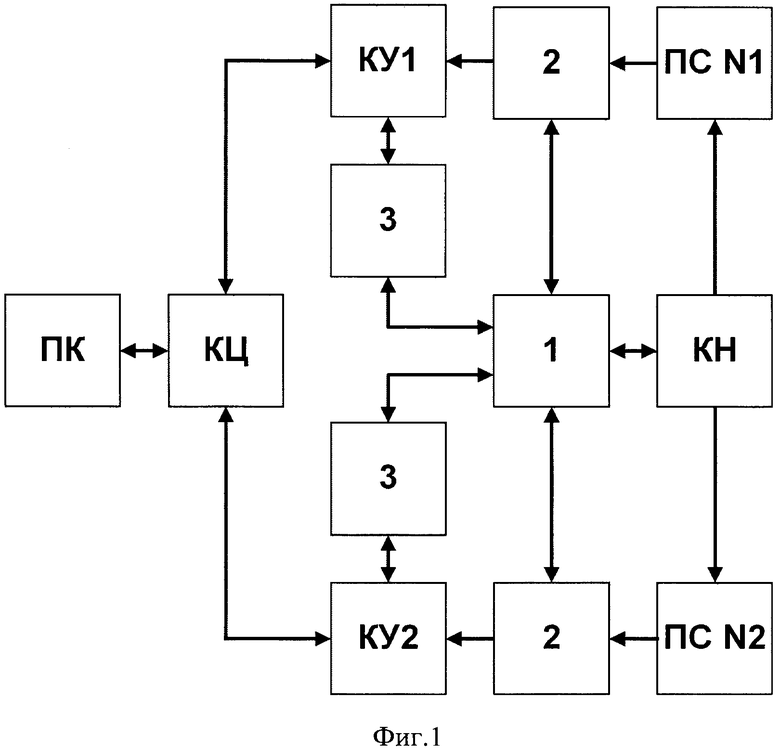
Способ управления технической системой с параллельным включением компьютеров управления с процедурой перераспределения вычислительной мощности между подсистемами, содержащими параллельно включенные компьютеры управления со значительно различающимися техническими характеристиками и группы функционирующих подсистем, способных исполнять независимые технологические процессы, отличающийся тем, что в основной код управления технической системой вводится группа, состоящая из трех программных процедур, а именно процедура перераспределения вычислительной мощности компьютеров управления между всеми подсистемами, обеспечивающая рациональное расходование имеющегося запаса вычислительной мощности управляющих компьютеров между всеми активными подсистемами, исполняющих некоторый технологический процесс, процедуры оценки необходимого уровня потребления вычислительных ресурсов компьютеров управления со стороны каждой отдельной подсистемы, обеспечивающей мониторинг состояния протекания технологического процесса и число запросов со стороны реализующих его подсистем, а также процедуры оценки технического состояния компьютера управления, нацеленных на: недопущение выхода компьютеров управления из штатного состояния работы; мониторинг уровня потребления вычислительных ресурсов со стороны подсистем; реализацию функции оптимального перераспределения каналов передачи данных всех подсистем исходя из особенностей протекания технологического процесса в каждой из них.
| Способ получения щелочно-двукальциевой соли фосфорной кислоты | 1925 |
|
SU6307A1 |
| ИЗБЫТОЧНАЯ СИСТЕМА АВТОМАТИЗАЦИИ ДЛЯ УПРАВЛЕНИЯ ТЕХНИЧЕСКИМ УСТРОЙСТВОМ, А ТАКЖЕ СПОСОБ ЭКСПЛУАТАЦИИ ПОДОБНОГО ТИПА СИСТЕМЫ АВТОМАТИЗАЦИИ | 2003 |
|
RU2362199C2 |
| СПОСОБ ЧЕТЫРЕХУРОВНЕВОГО УПРАВЛЕНИЯ ТЕХНИЧЕСКИМИ СРЕДСТВАМИ И СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2453894C1 |

