Настоящее изобретение относиться к области радиотехники и связи и может быть использовано для разработки системы управления автоматизированных комплексов связи и других сложных объектов.
Эффективное функционирование автоматизированных систем связи может быть обеспечено лишь путем автоматизированного управления системой связи в целом и ее отдельными элементами - комплексами и средствами связи кораблей и летательных аппаратов. Основой корабельного автоматизированного комплекс связи (АКС), объединяющей средства связи корабля в единое целое, является его управляющая система (УС), которая представляет собой совокупность технических средств, вырабатывающих управляющие воздействия для организации каналов связи и управления прохождением информации по каналам АКС. [Катанович А.А., Муравченко В.Л. Автоматизация управления корабельными комплексами связи ВМФ. СПб., Судостроение, 2014].
Известны корабельные комплексы связи. Патент РФ №2520371 от 27.06.2014 г. Кл. Н04В 13/00. Бюл. №18. Корабельный унифицированный комплекс связи. Патент РФ №2548023 от 20.01.2015 г. Кл. Н04В 7/00. Бюл. №2. Интегрированный комплекс связи надводного корабля и др.
Одной из причин, вызывающих затруднение в организации алгоритма управления управляющей системой АКС является высокая сложность формального описания происходящих изменений в технологическом процессе (ТП). Для широкого комплекса ТП выделяют ряд общих свойств, затрудняющих в настоящее время их изучение и дальнейшее применение: нелинейность протеканий реакций; сложность непосредственного влияния на управляемые факторы; зачатую быстрые необратимые изменения состояния технологической среды [Найденов Е.В., Якименко И.В. Классификация схем управления сложными техническими системами // Сборник трудов V Международной научно-технической конференции 2015 г. Универсум, филиал НИУ МЭИ Т. 1. С. 370-374]. Попытка разработчиков комплексно автоматизировать УС без подробного изучения особенностей организации ТП, учета факторов влияющих на него во временном интервале и последующем построения матриц зависимостей приводит к выходу из строя дорогостоящего оборудования и утрате исследуемых материалов и веществ. Кроме того, особенностью новых перспективных ТП является невозможность их предварительного компьютерного моделирования, а все регистрируемые факторы изменений могут быть выявлены только в реальных испытаниях. В связи с этим разработка гибкого способа управления сложной УС, предназначенной для обеспечения стационарного протекания ТП с нелинейно изменяющимися факторами протекания реакции, является весьма актуальной технической задачей.
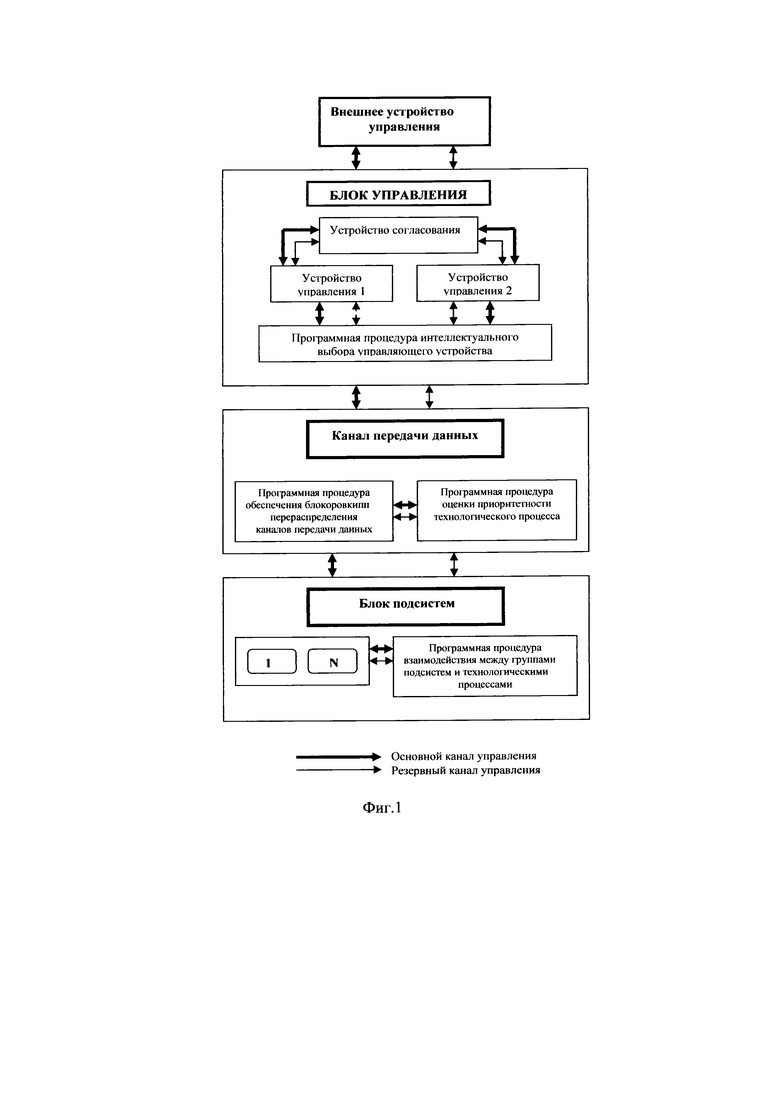
Прототипом заявляемого способа является способ с внешним управлением, основанный на разделении функций основного канала управления УС.[Иванов А.А., Торохов С.Л. Управление в технических системах. М.: Форум. 2012]. Способ управления технической системой с внешним управлением (с дублирующим внутренним каналом). См. фиг. 1.
Недостатком данного способа является то, что резервный канал не позволяет проводить калибровку основных устройств управления (УУ).
Проведенный анализ уровня техники позволил установить, что аналоги, характеризующиеся совокупностью признаков, тождественных всем признакам заявленного технического решения, отсутствуют в известных источниках информации, что указывает на соответствие заявленного способа условию патентоспособности «новизна».
Результаты поиска известных решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличительными от прототипа признаками заявленного объекта, показали, что они не следуют явным образом из уровня техники. Следовательно, соответствует условию патентоспособности «изобретательский уровень»
Целью изобретения является реализация функции проведения калибровки основных устройств управления со стороны внешнего управляющего устройства.
Поставленная цель достигается тем, что в способ управления управляющей системой АКС, основанный на разделении функций основного канала управления системой и его обработкой, введена обратная связь основного канала управления с резервным каналом.
Техническая реализация предлагаемого способа осуществляется следующим образом.
В ходе управления вносятся изменения в код выполняемого алгоритма основными устройствами управления благодаря обратной связи с резервного канала, при этом используют ресурсы внешнего управляющего устройства, разгружая тем самым функции основных устройств управления, при этом внешнее устройство управления подключают к общей компьютерной сети, где каждое устройство управляется собственным оператором, причем получают достаточный запас ресурсов при нелинейном протекании технического процесса без необходимости множественной перенастройки основных устройств управления и кода выполняемого алгоритма.
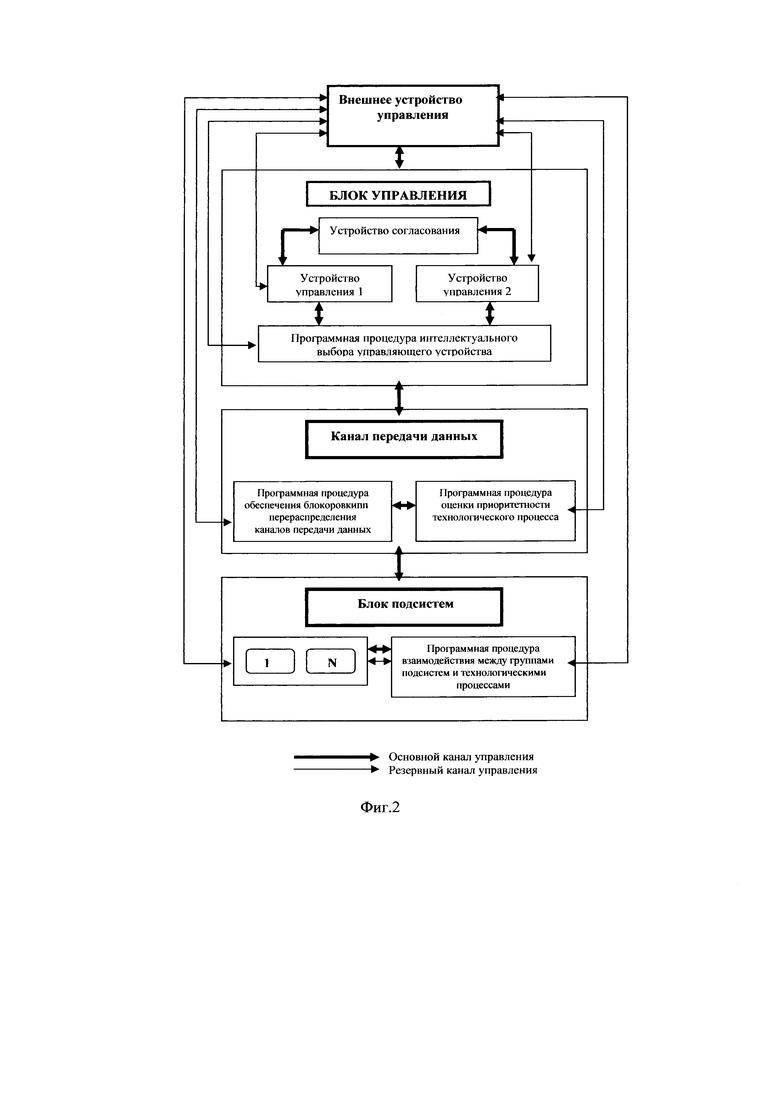
Предлагаемый способ с внешним резервным каналом, фиг. 2. создает разделенные каналы управления узлами УС, которые могут быть активны одновременно. При этом оператор вносит изменения в код выполняемого алгоритма основными УУ и использует ресурсы внешнего управляющего устройства, разгружая тем самым функции основных УУ. Кроме того, внешнее УУ подключено к общей компьютерной сети, где каждое устройство управляется собственным оператором. Таким образом, реально получить достаточный запас ресурсов при нелинейном протекании УС без необходимости множественной перестройки основных УУ и кода выполняемого алгоритма.
Сложность обработки данных в УС с нелинейно протекающими реакциями создает определенную нагрузку на устройства управления КС. Такой способ может быть применен для УС, имеющих в основе СУ несколько параллельно включенных УУ. Причем внешнее УУ также может выступать как элемент общей обработки совместных результатов. Соответственно УС может организовать программные процедуры по перераспределению вычислительной мощности между всеми УУ (основными и внешними), а при условии значительно различающихся технических характеристик между этими устройствами - организовать программную процедуру балансировки вычислительной нагрузки между более быстрым и медленным УУ. Изучение сложного УС может быть организовано целой сетью взаимосвязанных УУ, каждый из которых способен формировать команды воздействия на алгоритм управления УС. При подобной организации СУ возможно, получить схемы постоянного контроля УС с облачной или серверной средой внешней обработки данных.
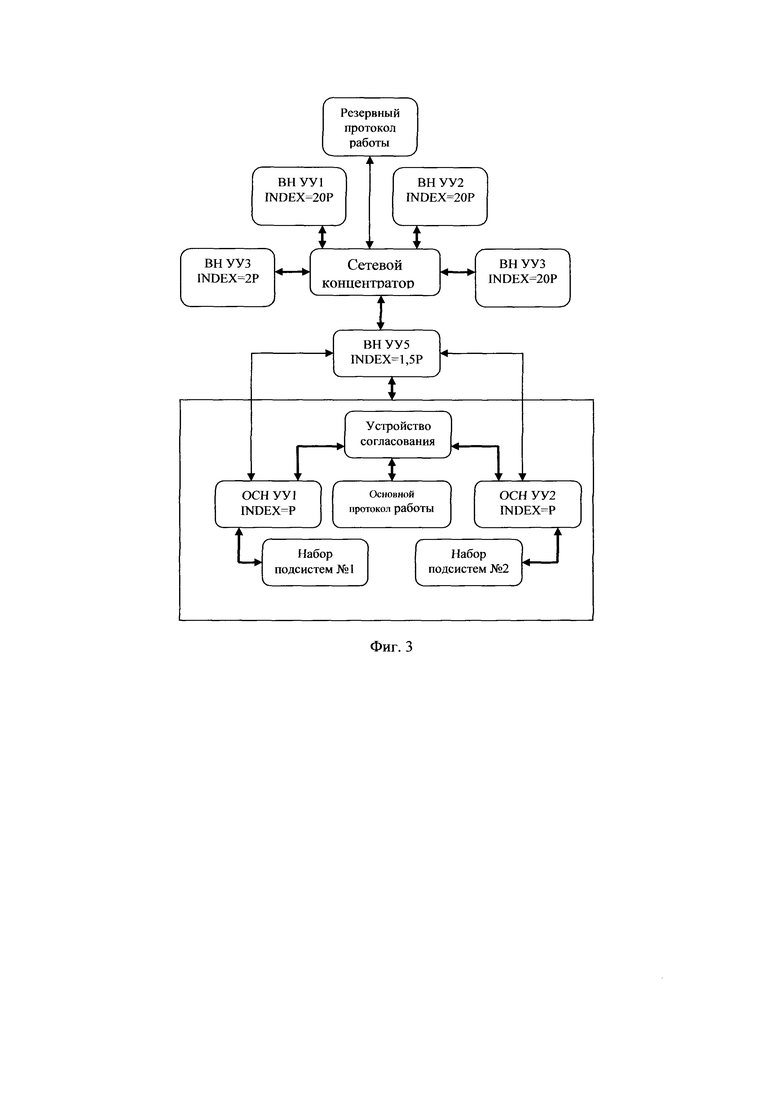
Разработана схема управления УС представлена на фиг. 3 и включает в себя набор внешних УУ, включенных по локальной сетевой схеме «звезда». В основе аппаратной части УС находится два основных УУ, каждый из которых имеет независимо управляемые узлы и подсистемы. Обмен данными, а также разделение каналов управления между основными УУ происходит через устройство согласования, под которым понимается сетевой концентратор или специализированные схемы включения, рекомендуемые производителем при использовании схожих устройств. Основной протокол работы УС загружен в УУ, конструктивно входящие в состав УС, резервный протокол работы и инструменты воздействия на узлы загружены в локальной сети. При этом каждое внешнее УУ или группа устройств может являться основным управляющим в УС.
При описании способа применен термин - запас вычислительной мощности УУ. Под вычислительной мощностью УУ (производительность устройства) понимается количественная характеристика скорости выполнения вычислительных операций ЦП. Прежде всего она основана на расчете количества используемых ресурсов в УУ (буфера и частоты работ ЦП и объема ОЗУ) на одну подсистему. Вычисление потребления ресурсов проводится последовательным тестированием всех подсистем, при котором остальные узлы УС не используются. Если каждая из подсистем способна в обычном режиме работы задействовать все доступные ресурсы УУ, то запускается программная процедура балансировки вычислительной мощности. Она выполняется путем равного разделения доступных ресурсов УУ между всеми узлами. Значение производительности УУ принято оценивать в Гигафлопсах (GELOPS). На фиг. 3 для всех УУ задан индекс, где Р - базовое значение производительности основного устройства управления. Значения коэффициентов перед индексом у остальных УУ показывают доступный (в число раз) запас производительности. В качестве основного УУ применялся миниатюрный одноплатный компьютер Raspberry Pi 2В (1 ГГц, 1 Гб ОЗУ) с модулем расширения Gertboard для подключения всех узлов, входящих в УС.
Программное обеспечение, загруженное в локальную сеть позволяет выполнять процедуры балансировки вычислительной мощности, в том числе между основными УУ, а в случае резкого роста потребления ресурсов - выделить отдельные задачи на каждое УУ. При нестационарном протекании УС основные УУ не отключаются, а перенастраиваются внешним УУ для дальнейшего выполнения основных функций работы базового протокола управления (в который также вносятся коррективы). Таким образом, резервный канал управления служит для отладки УС для дальнейшей калибровки основных УУ, предотвращая остановку работы УС в случае нестационарного протекания реакций.
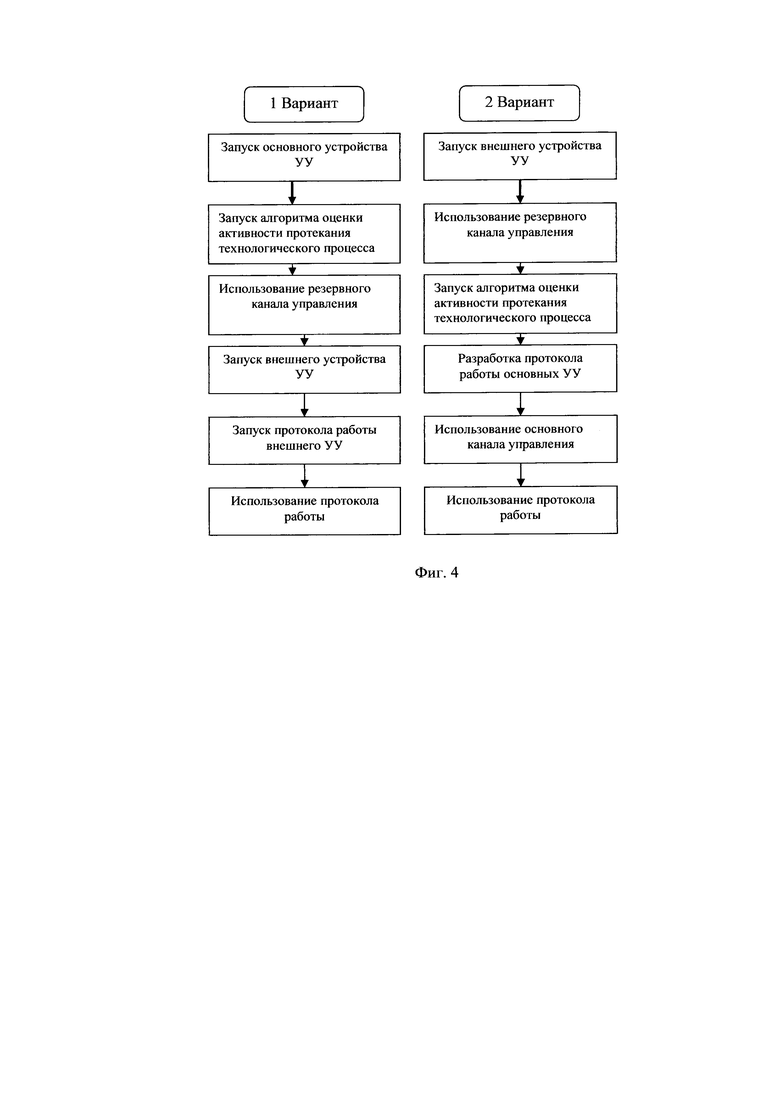
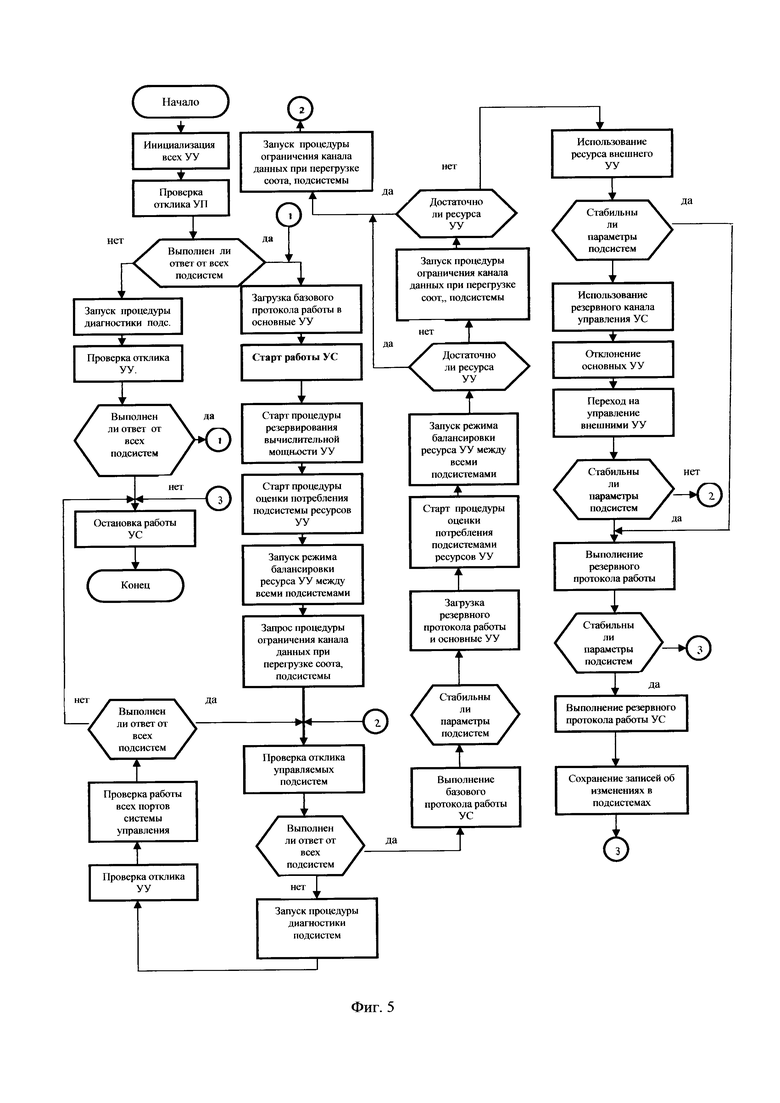
На фиг. 4 представлены варианты применения резервного канала управления для двух вариантов ситуаций: возникновение нестационарной ситуации в ТП при запуске основных УУ (1 вариант); калибровки основных УУ при первоначальном запуске УС по резервному каналу управления (2 вариант). Использование внешнего УУ или локально объединенных устройств позволяет реализовать функции удаленного управления УС, в том числе облачных вычислений и защищенных сетевых каналов передачи данных, а также предотвращает выход из строя одного из внешних УУ. Блок-схема алгоритма управления технической системой с внешним воздействием представлена на фиг. 5.
Проведены натурные испытания работы УС с учетом внесенных технических изменений, соответствующих реализации предложенного способа.
Проведена проверка работоспособности алгоритма функционирования СУ в режиме ввода новых факторов воздействия на УС. Накопленные данные позволили построить графики фиг. 6, в которых отражены особенности работы УС для различных ситуаций протекания УС.
Графическое представление результатов испытаний технической системы: 1 - запуск УС с ранее изученным УС; 2 - запуск УС с не исследованным ТП; 3 - включение резервного канала при перегрузке УС в работе с не исследованным ТП; 4 - повторный запуск УС с учетом изменений в протоколе работы, внесенных после стадии 3; 5 - запуск УС с не исследованным ТП по резервному каналу с последующим переключение на работу основных УУ; 6 - запуск УС с не исследованным ТП по резервному каналу без использования основных УУ.
Испытание каждого режима работы УС проводились в течение 12 - часового временного диапазона, включающего стадии: подготовки активных подсистем и узлов к работе, последовательного запуска всех подсистем и выхода на основной режим работы, наблюдению и оценки протекания технологического процесса. Каждый тип запуска выполнялся 20 раз, выборка ограниченна сложностью протекания УС и стоимостью используемых материалов. Испытания подтвердили работоспособность способа управления, отладки программных функций. Как видно из графика, в случае протекания ранее не воспроизводимого УС с нелинейно меняющимися параметрами среды (линия 2), СУ потребляет все доступные вычислительные ресурсы, приводя к перегрузке основных УУ. Использование резервного канала (линия 3) позволяет распределить вычислительную мощность между основными УУ и внешними УУ, либо же полностью перевести дальнейший процесс управления на внешнее устройство, которое может обладать лучшими техническими характеристиками. Изучение нового ТП позволяет подготовить СУ к повторному воспроизведению подобного процесс и внести коррективы в основной протокол работы и УУ (линия 4). Использование резервного канала в качестве основного (линия 5) позволяет проанализировать готовность основных УУ и базового протокола работы к активному ТП, ведется расчет параметров потребления вычислительных ресурсов. Если же запас мощности основного УУ недостаточен (линия 6), то дальнейшие запуски могут быть выполнены только по резервному каналу управления, где основные УУ выполняют лишь отдельные функции в рамках организации СУ.
Результаты испытаний показали, что предложенный способ позволяет в среднем на 50% повысить срок службы УС, а также на 80% снизить число отказов УУ при высокой нагрузке ЦП.
Таким образом, возможным решением по конструированию систем управления корабельных автоматизированных комплексов связи, с сохранением тенденции по миниатюризации и комплектности габаритов, может являться использование предлагаемого способа, имеющего достаточный уровень надежности и запас вычислительной мощности внешних УУ.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНФОРМАЦИОННО-УПРАВЛЯЮЩИЙ КОМПЛЕКС АВТОМАТИЗИРОВАННОЙ СИСТЕМЫ УПРАВЛЕНИЯ ПОДГОТОВКОЙ ДВИГАТЕЛЬНЫХ УСТАНОВОК И ТЕХНОЛОГИЧЕСКИМ ОБОРУДОВАНИЕМ РАКЕТ КОСМИЧЕСКОГО НАЗНАЧЕНИЯ НА ТЕХНИЧЕСКОМ И СТАРТОВОМ КОМПЛЕКСАХ | 2015 |
|
RU2604362C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС СВЯЗИ НАДВОДНОГО КОРАБЛЯ | 2013 |
|
RU2548023C2 |
| Способ управления технической системой с параллельным включением компьютеров управления с внешним воздействием | 2015 |
|
RU2645176C2 |
| Автоматизированный корабельный комплекс связи | 2024 |
|
RU2827942C1 |
| КОРАБЕЛЬНЫЙ АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС СВЯЗИ | 2023 |
|
RU2819000C1 |
| Способ управления технической системой с параллельным включением компьютеров управления с процедурой перераспределения вычислительной мощности между подсистемами | 2015 |
|
RU2634058C2 |
| Интегрированная система навигации кораблей и судов обеспечения Военно-Морского Флота | 2020 |
|
RU2765606C1 |
| АВТОМАТИЗИРОВАННЫЙ КОРАБЕЛЬНЫЙ КОМПЛЕКС СВЯЗИ | 2018 |
|
RU2709791C2 |
| Способ управления технической системой с параллельным включением компьютеров управления с процедурой интеллектуального выбора управляющего устройства | 2015 |
|
RU2622661C2 |
| АВТОМАТИЗИРОВАННЫЙ КОРАБЕЛЬНЫЙ КОМПЛЕКС СВЯЗИ | 2021 |
|
RU2796120C1 |

Изобретение относиться к области радиотехники и связи и может быть использовано для разработки системы управления автоматизированных комплексов связи. Технический результат состоит в реализации функции полного доступа к управляющей системе со стороны внешнего управляющего устройства и процедуры внесения изменений в базовый протокол управления. Для этого в ходе управления вносят изменения в код выполняемого алгоритма основными устройствами управления благодаря обратной связи с резервного канала, при этом используют ресурсы внешнего управляющего устройства, разгружая тем самым функции основных устройств управления, причем внешнее устройство управления подключают к общей компьютерной сети, где каждое устройство управляется собственным оператором, при этом получают достаточный запас ресурсов при нелинейном протекании технического процесса без необходимости множественной перенастройки основных устройств управления и кода выполняемого алгоритма. 6 ил. 
Способ управления управляющей системой корабельного комплекса связи, предназначенной для организации каналов связи и обеспечения прохождения информации по каналам связи, основанный на разделении функций и доступных ресурсов между основным и резервным каналами управления системой и его обработкой, подключенными к общей компьютерной сети, отличающийся тем, что в ходе управления вносят изменения в код выполняемого алгоритма основными устройствами управления благодаря обратной связи с резервного канала, при этом используют ресурсы резервного канала управляющего устройства, разгружая тем самым функции основных устройств управления.
| МНОГОПРОЦЕССОРНАЯ КОРАБЕЛЬНАЯ ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА | 2015 |
|
RU2583741C1 |
| Устройство для загрузки тестовыми заготовками конвейеров расстойных пруферов и хлебопекарных печей | 1957 |
|
SU115139A1 |
| КОРАБЕЛЬНЫЙ КОМПЛЕКС РАДИОЭЛЕКТРОННОГО ПРОТИВОДЕЙСТВИЯ | 2002 |
|
RU2237907C2 |
| US 4965809 A, 27.12.1977 | |||
| Межоритарный триггер | 1973 |
|
SU465737A1 |

