Данная заявка основана на и по ней испрашивается приоритет по заявке на патент Китая номер 201410063121.0, поданной 22 февраля 2014 года, содержимое которой полностью содержится в данном документе посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее раскрытие сущности, в общем, относится к области техники обработки изображений, а более конкретно, к способу и устройству для обнаружения прямой линии.
УРОВЕНЬ ТЕХНИКИ
[0002] Обнаружение прямой линии и геометрической формы в области техники обработки изображений является важным вопросом. В реальной обстановке, поскольку существует большое число прямых линий и геометрических форм, в обработке изображений очень важно реализовывать способы для быстрого и точного обнаружения прямых линий и геометрических форм.
[0003] Способ для обнаружения геометрических форм обычно формируется из способа для обнаружения прямых линий. В предшествующем уровне техники, способ преобразования Хафа обычно используется для того, чтобы обнаруживать прямые линии. Преобразование Хафа задает параметрическое пространство, которое имеет двойную взаимосвязь с изображением, одна прямая линия в изображении соответствует одной точке в параметрическом пространстве, и одна точка в изображении соответствует одной синусоидальной кривой в параметрическом пространстве. Из вышеуказанной соответствующей взаимосвязи известно, что несколько коллинеарных точек на одной прямой линии в изображении соответствуют нескольким синусоидальным кривым, которые пересекаются в идентичной точке в параметрическом пространстве. На основе этого, проблема обнаружения прямой линии, имеющей максимальные коллинеарные точки в изображении, переходит в проблему обнаружения точки максимума, в которой число синусоидальных кривых, которые пересекаются в одной точке, является максимальным в параметрическом пространстве, и прямая линия, соответствующая точке максимума, является прямой линией, которая должна обнаруживаться в изображении.
[0004] В ходе реализации этого настоящего раскрытия сущности, по меньшей мере, вышеуказанные следующие проблемы обнаружены автором изобретения: в вышеописанном способе для обнаружения прямых линий на основе преобразования Хафа, поскольку несколько коллинеарных точек должны быть дискретизированы в изображении, изображение должно преобразовываться в двоичную форму сначала, а именно, получается двоичное изображение, состоящее из черных пиксельных точек и белых пиксельных точек, и затем несколько коллинеарных точек дискретизируются в двоичном изображении. Тем не менее, преобразование в двоичную форму изображения является чувствительным к параметрам, и оно является применимым только для обнаружения прямой линии, которая имеет сильную контрастность края, т.е. для прямой линии, имеющей значение полутонов, которое явно отличается от значений полутонов других областей в изображении. Кроме того, когда контрастность края является слабой, или существуют шумовые помехи, прямая линия может нарушаться, и на точность результатов обнаружения оказывается значительное влияние.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0005] Чтобы разрешать такую проблему в предшествующем уровне техники, что способ для обнаружения прямой линии может приводить к нарушению прямой линии и неточному результату обнаружения, когда контрастность края является слабой, или существуют шумовые помехи, варианты осуществления настоящего раскрытия сущности предоставляют способ и устройство для обнаружения прямой линии. Технические решения заключаются в следующем.
[0006] Согласно первому аспекту вариантов осуществления настоящего раскрытия сущности, предусмотрен способ для обнаружения прямой линии, включающий в себя:
[0007] - получение набора признаков гистограммы градиентов каждой из соответствующих пиксельных точек в изображении, при этом набор признаков гистограммы градиентов выполнен с возможностью отражать характеристики прямой линии локальной области, в которой расположена пиксельная точка;
[0008] - определение по меньшей мере одного возможного варианта направления прямой линии, которая должна обнаруживаться, согласно наборам признаков гистограммы градиентов соответствующих пиксельных точек; и
[0009] - определение точного направления и точной позиции прямой линии, которая должна обнаруживаться, согласно по меньшей мере одному возможному варианту направления.
[0010] Альтернативно, получение набора признаков гистограммы градиентов соответствующих пиксельных точек в изображении включает в себя:
[0011] - для каждой пиксельной точки (i, j) из соответствующих пиксельных точек, вычисление набора g(i, j) градиентов направления пиксельной точки, при этом набор g(i, j) градиентов направления включает в себя значения градиентов направления пиксельной точки в K направлениях, и значение градиента направления пиксельной точки в любом направлении означает абсолютное значение разности между значением полутонов пиксельной точки и значением полутонов смежной пиксельной точки в направлении, K≥2; и
[0012] - вычисление набора h(i, j) признаков гистограммы градиентов пиксельной точки согласно набору g(i, j) градиентов направления пиксельной точки.
[0013] Альтернативно, вычисление набора h(i, j) признаков гистограммы градиентов пиксельной точки согласно набору g(i, j) градиентов направления пиксельной точки включает в себя:
[0014] - соответствующее вычисление значений  локального градиента пиксельной точки в K направлениях, при этом значение локального градиента в k-направлении равно сумме значений градиентов направления всех пиксельных точек в k-направлении в локальной области, в которой расположена пиксельная точка, и при этом k представляет направление;
локального градиента пиксельной точки в K направлениях, при этом значение локального градиента в k-направлении равно сумме значений градиентов направления всех пиксельных точек в k-направлении в локальной области, в которой расположена пиксельная точка, и при этом k представляет направление;
[0015] - вычисление среднего значения hnorm(i, j) градиента пиксельной точки, при этом среднее значение hnorm(i, j) градиента равно извлечению корня суммы квадратов соответствующих значений  локального градиента пиксельной точки;
локального градиента пиксельной точки;
[0016] - деление значения локального градиента на среднее значение hnorm(i, j) градиента, чтобы получать признак hk(i, j) гистограммы градиентов пиксельной точки в k-направлении; и
[0017] - определение набора признаков гистограммы градиентов в K направлениях в качестве набора h(i, j) признаков гистограммы градиентов пиксельной точки.
[0018] Альтернативно, способ дополнительно включает в себя:
[0019] - для каждой пиксельной точки (i, j) из соответствующих пиксельных точек, обнаружение того, меньше или нет среднее значение hnorm(i, j) градиента предварительно определенного среднего значения Tnorm; и
[0020] - если результат обнаружения заключается в том, что среднее значение hnorm(i, j) градиента меньше предварительно определенного среднего значения Tnorm, задание соответствующих признаков гистограммы градиентов в наборе h(i, j) признаков гистограммы градиентов пиксельной точки равными нулю.
[0021] Альтернативно, определение по меньшей мере одного возможного варианта направления прямой линии, которая должна обнаруживаться, согласно наборам признаков гистограммы градиентов соответствующих пиксельных точек включает в себя:
[0022] - для каждой из соответствующих пиксельных точек выбор направления, соответствующего признаку гистограммы градиентов, имеющему максимальное значение в наборе признаков гистограммы градиентов, в качестве основного направления локальной области, в которой расположена пиксельная точка;
[0023] - проведение статистических вычислений числа голосов основных направлений локальных областей, в которых расположены соответствующие пиксельные точки в K направлениях; и
[0024] - выбор направления, перпендикулярного направлению, имеющему число голосов, которое превышает пороговое значение числа голосов, в качестве возможного варианта направления прямой линии, которая должна обнаруживаться.
[0025] Альтернативно, определение точного направления и позиции прямой линии, которая должна обнаруживаться, согласно по меньшей мере одному возможному варианту направления включает в себя:
[0026] - для каждого из возможных вариантов направлений формирование по меньшей мере одной линии сканирования, параллельной возможному варианту направления;
[0027] - соответствующее вычисление совпадающего расстояния каждой линии сканирования, при этом совпадающее расстояние линии сканирования выполнено с возможностью отражать степень близости линии сканирования к прямой линии, которая должна обнаруживаться;
[0028] - выбор линии сканирования, имеющей минимальное совпадающее расстояние, в качестве возможного варианта прямой линии; и
[0029] - определение точного направления и точной позиции прямой линии, которая должна обнаруживаться, согласно возможному варианту прямой линии.
[0030] Альтернативно, соответствующее вычисление совпадающего расстояния каждой линии сканирования включает в себя:
[0031] - для каждой из линий сканирования получение n точек выборки посредством дискретизации на линии сканирования, n≥1;
[0032] - вычисление совпадающего расстояния между набором признаков гистограммы градиентов для каждой из соответствующих точек выборки и набором признаков гистограммы градиентов шаблонов в направлении, перпендикулярном возможному варианту направления; и
[0033] - суммирование совпадающих расстояний n точек выборки, чтобы получать совпадающее расстояние линии сканирования.
[0034] Альтернативно, определение точного направления и позиции прямой линии, которая должна обнаруживаться, согласно возможному варианту прямой линии включает в себя:
[0035] - формирование прямоугольной области, имеющей предварительно определенный размер, посредством использования возможного варианта прямой линии в качестве центральной оси;
[0036] - соответствующий выбор u точек и v точек на двух сторонах прямоугольной области, перпендикулярной возможному варианту прямой линии, и соединение каждых двух точек на двух сторонах, с тем чтобы получать u*v сегментов линии, u≥1, v≥1;
[0037] - соответствующее вычисление совпадающего расстояния каждого сегмента линии из u*v сегментов линии, при этом совпадающее расстояние сегмента линии выполнено с возможностью отражать степень близости сегмента линии к прямой линии, которая должна обнаруживаться; и
[0038] - выбор прямой линии, которой принадлежит сегмент линии, имеющий минимальное совпадающее расстояние, в качестве прямой линии, которая должна обнаруживаться.
[0039] Альтернативно, способ дополнительно включает в себя:
[0040] - для любой прямой линии, которая должна обнаруживаться, обнаружение того, существует или нет в изображении вторая прямая линия, которая должна обнаруживаться, которая удовлетворяет первому предварительно определенному условию, при этом первое предварительно определенное условие включает в себя то, что вторая прямая линия, которая должна обнаруживаться, и прямая линия, которая должна обнаруживаться, имеют точку пересечения внутри изображения, и угол между ними меньше порогового значения угла;
[0041] - если результат обнаружения заключается в том, что вторая прямая линия, которая должна обнаруживаться, которая удовлетворяет первому предварительно определенному условию, существует, добавление второй прямой линии, которая должна обнаруживаться, в набор возможных вариантов прямых линий;
[0042] - для любых двух из вторых прямых линий, которые должны обнаруживаться в наборе возможных вариантов прямых линий, обнаружение того, существует или нет третья прямая линия, которая должна обнаруживаться, которая удовлетворяет второму предварительно определенному условию, при этом второе предварительно определенное условие включает в себя то, что третья прямая линия, которая должна обнаруживаться, отличается от прямой линии, которая должна обнаруживаться, и третья прямая линия, которая должна обнаруживаться, пересекает обе из двух вторых прямых линий, которые должны обнаруживаться, с двумя точками пересечения внутри изображения;
[0043] - если результат обнаружения заключается в том, что третья прямая линия, которая должна обнаруживаться, которая удовлетворяет второму предварительно определенному условию, существует, добавление четырехугольника, состоящего из прямой линии, которая должна обнаруживаться, двух вторых прямых линий, которые должны обнаруживаться, и третьей прямой линии, которая должна обнаруживаться, в набор возможных вариантов прямоугольников;
[0044] - для каждого четырехугольника в наборе возможных вариантов прямоугольников вычисление совпадающего расстояния прямоугольника, при этом совпадающее расстояние четырехугольника выполнено с возможностью отражать степень близости четырехугольника к прямоугольнику, который должен обнаруживаться, и совпадающее расстояние четырехугольника равно сумме совпадающих расстояний сегментов линии, соответствующих четырем сторонам четырехугольника; и
[0045] - определение четырехугольника, имеющего минимальное совпадающее расстояние или совпадающее расстояние, меньшее порогового значения для определения совпадения, в качестве прямоугольника, который должен обнаруживаться.
[0046] Согласно второму аспекту вариантов осуществления настоящего раскрытия сущности, предусмотрено устройство для обнаружения прямой линии, включающее в себя:
[0047] - модуль получения признаков, выполненный с возможностью получать набор признаков гистограммы градиентов каждой из соответствующих пиксельных точек в изображении, при этом набор признаков гистограммы градиентов выполнен с возможностью отражать характеристики прямой линии локальной области, в которой расположена пиксельная точка;
[0048] - модуль определения возможных вариантов, выполненный с возможностью определять по меньшей мере один возможный вариант направления прямой линии, которая должна обнаруживаться, согласно наборам признаков гистограммы градиентов соответствующих пиксельных точек; и
[0049] - модуль определения точных показателей, выполненный с возможностью определять точное направление и точную позицию прямой линии, которая должна обнаруживаться, согласно по меньшей мере одному возможному варианту направления.
[0050] Альтернативно, модуль получения признаков включает в себя блок вычисления градиентов и блок вычисления признаков, при этом:
[0051] - блок вычисления градиентов выполнен с возможностью, для каждой пиксельной точки (i, j) из соответствующих пиксельных точек, вычислять набор g(i, j) градиентов направления пиксельной точки, при этом набор g(i, j) градиентов направления включает в себя значения градиентов направления пиксельной точки в K направлениях, и значение градиента направления пиксельной точки в любом направлении означает абсолютное значение разности между значением полутонов пиксельной точки и значением полутонов смежной пиксельной точки в направлении, K≥2, и
[0052] - блок вычисления признаков выполнен с возможностью вычислять набор h(i, j) признаков гистограммы градиентов пиксельной точки согласно набору g(i, j) градиентов направления пиксельной точки.
[0053] Альтернативно, блок вычисления признаков включает в себя субблок локальных градиентов, субблок средних градиентов, субблок вычисления признаков и субблок определения признаков, при этом:
[0054] - субблок локальных градиентов выполнен с возможностью соответственно вычислять значения  локального градиента пиксельной точки в K направлениях, при этом значение локального градиента в k-направлении равно сумме значений градиентов направления всех пиксельных точек в k-направлении в локальной области, в которой расположена пиксельная точка, и при этом k представляет направление,
локального градиента пиксельной точки в K направлениях, при этом значение локального градиента в k-направлении равно сумме значений градиентов направления всех пиксельных точек в k-направлении в локальной области, в которой расположена пиксельная точка, и при этом k представляет направление,
[0055] - субблок средних градиентов выполнен с возможностью вычислять среднее значение hnorm(i, j) градиента пиксельной точки, при этом среднее значение hnorm(i, j) градиента равно извлечению корня суммы квадратов соответствующих значений локального градиента пиксельной точки,
[0056] - субблок вычисления признаков выполнен с возможностью делить значение локального градиента на среднее значение hnorm(i, j) градиента, чтобы получать признак hk(i, j) гистограммы градиентов пиксельной точки в k-направлении, и
[0057] - субблок определения признаков выполнен с возможностью определять набор признаков гистограммы градиентов в K направлениях в качестве набора h(i, j) признаков гистограммы градиентов пиксельной точки.
[0058] Альтернативно, устройство дополнительно включает в себя субблок обнаружения средних значений и субблок задания признаков равными нулю, при этом:
[0059] - субблок обнаружения средних значений выполнен с возможностью, для каждой пиксельной точки (i, j) из соответствующих пиксельных точек, обнаруживать то, меньше или нет среднее значение hnorm(i, j) градиента предварительно определенного среднего значения Tnorm, и
[0060] - субблок задания признаков равными нулю выполнен с возможностью задавать соответствующие признаки гистограммы градиентов в наборе h(i, j) признаков гистограммы градиентов пиксельной точки равными нулю, если результат обнаружения заключается в том, что среднее значение hnorm(i, j) градиента меньше предварительно определенного среднего значения Tnorm.
[0061] Альтернативно, модуль определения возможных вариантов включает в себя блок выбора направлений, блок статистических вычислений числа голосов и блок выбора возможных вариантов, при этом:
[0062] - блок выбора направлений выполнен с возможностью, для каждой из соответствующих пиксельных точек, выбирать направление, соответствующее признаку гистограммы градиентов, имеющему максимальное значение в наборе признаков гистограммы градиентов, в качестве основного направления локальной области, в которой расположена пиксельная точка,
[0063] - блок статистических вычислений числа голосов выполнен с возможностью проводить статистические вычисления числа голосов основных направлений локальных областей, в которых расположены соответствующие пиксельные точки в K направлениях, и
[0064] - блок выбора возможных вариантов выполнен с возможностью выбирать направление, перпендикулярное направлению, имеющему число голосов, которое превышает пороговое значение числа голосов, в качестве возможного варианта направления прямой линии, которая должна обнаруживаться.
[0065] Альтернативно, модуль определения точных показателей включает в себя блок формирования сканирования, блок вычисления совпадения сканирования, блок выбора сканирования и блок определения точных показателей, при этом:
[0066] - блок формирования сканирования выполнен с возможностью, для каждого из возможных вариантов направлений, формировать по меньшей мере одну линию сканирования, параллельную возможному варианту направления,
[0067] - блок вычисления совпадения сканирования выполнен с возможностью соответственно вычислять совпадающее расстояние каждой линии сканирования, при этом совпадающее расстояние линии сканирования выполнено с возможностью отражать степень близости линии сканирования к прямой линии, которая должна обнаруживаться,
[0068] - блок выбора сканирования выполнен с возможностью выбирать линию сканирования, имеющую минимальное совпадающее расстояние, в качестве возможного варианта прямой линии, и
[0069] - блок определения точных показателей выполнен с возможностью определять точное направление и точную позицию прямой линии, которая должна обнаруживаться, согласно возможному варианту прямой линии.
[0070] Альтернативно, блок вычисления совпадения сканирования включает в себя субблок получения выборок, субблок вычисления совпадения выборок и субблок суммирования совпадающих расстояний выборок, при этом:
[0071] - субблок получения выборок выполнен с возможностью, для каждой из линий сканирования, получения n точек выборки посредством дискретизации на линии сканирования, n≥1,
[0072] - субблок вычисления совпадения выборок выполнен с возможностью вычислять совпадающее расстояние между набором признаков гистограммы градиентов для каждой из соответствующих точек выборки и набором признаков гистограммы градиентов шаблонов в направлении, перпендикулярном возможному варианту направления, и
[0073] - субблок суммирования совпадающих расстояний выборок выполнен с возможностью суммировать совпадающие расстояния n точек выборки, чтобы получать совпадающее расстояние линии сканирования.
[0074] Альтернативно, блок определения точных показателей включает в себя субблок формирования прямоугольников, субблок формирования сегментов линии, субблок вычисления совпадения сегментов линии и субблок выбора сегментов линии, при этом:
[0075] - субблок формирования прямоугольников выполнен с возможностью формировать прямоугольную область, имеющую предварительно определенный размер, посредством использования возможного варианта прямой линии в качестве центральной оси,
[0076] - субблок формирования сегментов линии выполнен с возможностью соответственно выбирать u точек и v точек на двух сторонах прямоугольной области, перпендикулярной возможному варианту прямой линии, и соединять каждые две точки на двух сторонах, с тем чтобы получать u*v сегментов линии, u≥1, v≥1,
[0077] - субблок вычисления совпадения сегментов линии выполнен с возможностью соответственно вычислять совпадающее расстояние каждого сегмента линии из u*v сегментов линии, при этом совпадающее расстояние сегмента линии выполнено с возможностью отражать степень близости сегмента линии к прямой линии, которая должна обнаруживаться, и
[0078] - субблок выбора сегментов линии выполнен с возможностью выбирать прямую линию, которой принадлежит сегмент линии, имеющий минимальное совпадающее расстояние, в качестве прямой линии, которая должна обнаруживаться.
[0079] Альтернативно, устройство дополнительно включает в себя:
[0080] - первый модуль обнаружения, выполненный с возможностью, для любой прямой линии, которая должна обнаруживаться, обнаруживать то, существует или нет в изображении вторая прямая линия, которая должна обнаруживаться, которая удовлетворяет первому предварительно определенному условию, при этом первое предварительно определенное условие включает в себя то, что вторая прямая линия, которая должна обнаруживаться, и прямая линия, которая должна обнаруживаться, имеют точку пересечения внутри изображения, и угол между ними меньше порогового значения угла;
[0081] - модуль возможных вариантов прямых линий, выполненный с возможностью добавлять вторую прямую линию, которая должна обнаруживаться, в набор возможных вариантов прямых линий, если результат обнаружения заключается в том, что вторая прямая линия, которая должна обнаруживаться, которая удовлетворяет первому предварительно определенному условию, существует; и
[0082] - второй модуль обнаружения, выполненный с возможностью, для любых двух из вторых прямых линий, которые должны обнаруживаться в наборе возможных вариантов прямых линий, обнаруживать то, существует или нет третья прямая линия, которая должна обнаруживаться, которая удовлетворяет второму предварительно определенному условию, при этом второе предварительно определенное условие включает в себя то, что третья прямая линия, которая должна обнаруживаться, отличается от прямой линии, которая должна обнаруживаться, и третья прямая линия, которая должна обнаруживаться, пересекает обе из двух вторых прямых линий, которые должны обнаруживаться, с двумя точками пересечения внутри изображения;
[0083] - модуль возможных вариантов прямоугольников, выполненный с возможностью добавлять четырехугольник, состоящий из прямой линии, которая должна обнаруживаться, двух вторых прямых линий, которые должны обнаруживаться, и третьей прямой линии, которая должна обнаруживаться, в набор возможных вариантов прямоугольников, если результат обнаружения заключается в том, что третья прямая линия, которая должна обнаруживаться, которая удовлетворяет второму предварительно определенному условию, существует;
[0084] - модуль вычисления совпадающих расстояний, выполненный с возможностью, для каждого четырехугольника в наборе возможных вариантов прямоугольников, вычислять совпадающее расстояние прямоугольника, при этом совпадающее расстояние четырехугольника выполнено с возможностью отражать степень близости четырехугольника к прямоугольнику, который должен обнаруживаться, и совпадающее расстояние четырехугольника равно сумме совпадающих расстояний сегментов линии, соответствующих четырем сторонам четырехугольника; и
[0085] - модуль определения прямоугольников, выполненный с возможностью определять четырехугольник, имеющий минимальное совпадающее расстояние или совпадающее расстояние, меньшее порогового значения для определения совпадения, в качестве прямоугольника, который должен обнаруживаться.
[0086] Технические решения, предоставленные посредством вариантов осуществления настоящего раскрытия сущности, могут включать в себя следующие преимущества.
[0087] Посредством получения набора признаков гистограммы градиентов каждой из соответствующих пиксельных точек в изображении; определения по меньшей мере одного возможного варианта направления прямой линии, которая должна обнаруживаться, согласно наборам признаков гистограммы градиентов соответствующих пиксельных точек; и затем определения точного направления и точной позиции прямой линии, которая должна обнаруживаться, согласно по меньшей мере одному возможному варианту направления, при этом набор признаков гистограммы градиентов выполнен с возможностью отражать характеристики прямой линии локальной области, в которой расположена пиксельная точка, разрешается такая проблема в предшествующем уровне техники, что способ для обнаружения прямой линии может приводить к нарушению прямой линии и неточному результату обнаружения, когда контрастность края является слабой, или существуют шумовые помехи. По сравнению со связанным способом для обнаружения прямой линии в разделе "Уровень техники", способ для обнаружения прямой линии, предоставленный посредством настоящего варианта осуществления, ни использует преобразование Хафа, ни преобразует в двоичную форму изображение, за счет этого исключая влияние ошибок, вызываемых посредством преобразования в двоичную форму, и повышая точность обнаружения прямой линии.
[0088] Следует понимать, что как вышеприведенное общее описание, так и нижеприведенное подробное описание являются только примерными, а не ограничивающими настоящее раскрытие сущности.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0089] Прилагаемые чертежи в данном документе, которые содержатся и составляют часть этого подробного описания, иллюстрируют варианты осуществления в соответствии с изобретением и наряду с описанием служат для того, чтобы пояснять принципы изобретения.
[0090] Чтобы явным образом пояснять варианты осуществления настоящего раскрытия сущности, в дальнейшем в этом документе в простой форме предоставлено введение в чертежи, которые должны использоваться при иллюстрации вариантов осуществления. Очевидно, что нижеприведенные чертежи иллюстрируют только некоторые варианты осуществления настоящего раскрытия сущности, и специалисты в данной области техники могут получать другие чертежи на основе этих чертежей без изобретательских усилий.
[0091] Фиг. 1 является блок-схемой последовательности операций, показывающей способ для обнаружения прямой линии, согласно примерному варианту осуществления;
[0092] Фиг. 2A является блок-схемой последовательности операций, показывающей способ для обнаружения прямой линии, согласно другому примерному варианту осуществления;
[0093] Фиг. 2B является схематичным видом, приспосабливаемым в себе в процессе вычисления признаков способа для обнаружения прямой линии, согласно другому примерному варианту осуществления;
[0094] Фиг. 2C является схематичным видом, приспосабливаемым в себе в процессе прямого выбора способа для обнаружения прямой линии, согласно другому примерному варианту осуществления;
[0095] Фиг. 3 является схемой, показывающей устройство для обнаружения прямой линии, согласно примерному варианту осуществления;
[0096] Фиг. 4 является схемой, показывающей устройство для обнаружения прямой линии, согласно другому примерному варианту осуществления; и
[0097] Фиг. 5 является блок-схемой, показывающей устройство, которое предназначено для обнаружения прямой линии, согласно примерному варианту осуществления.
[0098] Конкретные варианты осуществления в этом раскрытии сущности показаны на вышеприведенных чертежах и далее подробно описываются. Чертежи и письменное описание не имеют намерение каким-либо образом ограничивать объем идей изобретения. Наоборот, они предоставляются для того, чтобы иллюстрировать идеи изобретения для специалистов в данной области техники со ссылкой на конкретные варианты осуществления.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0099] Чтобы обеспечивать большую ясность целей, технических решений и преимуществ настоящего раскрытия сущности, настоящее раскрытие сущности подробнее описывается со ссылкой на прилагаемые чертежи. Очевидно, что описанные варианты осуществления являются только частью вариантов осуществления настоящего раскрытия сущности, а не всеми вариантами осуществления настоящего раскрытия сущности. Все остальные варианты осуществления, полученные специалистами в данной области техники без изобретательских усилий на основе вариантов осуществления настоящей заявки, попадают в пределы объема защиты настоящего раскрытия сущности.
[00100] Во-первых, следует пояснить, что электронное устройство, приспосабливаемое в настоящем раскрытии сущности, может представлять собой сотовый телефон, планшетный PC, устройство для чтения электронных книг, проигрыватель по стандарту MP3 (стандарту уровня 3 Экспертной группы по киноизображению), проигрыватель по стандарту MP4 (стандарту уровня 4 Экспертной группы по киноизображению), портативный переносной компьютер, настольный компьютер и т.п. Между тем, электронное устройство включает в себя компонент накопления изображений, такой как камера.
[00101] Фиг. 1 является блок-схемой последовательности операций, показывающей способ для обнаружения прямой линии, согласно примерному варианту осуществления. Настоящий вариант осуществления иллюстрирует способ для обнаружения прямой линии, который должен применяться в электронном устройстве. Способ для обнаружения прямой линии может включать в себя следующие этапы.
[00102] На этапе 102 получается набор признаков гистограммы градиентов каждой из соответствующих пиксельных точек в изображении, при этом набор признаков гистограммы градиентов выполнен с возможностью отражать характеристики прямой линии локальной области, в которой расположена пиксельная точка.
[00103] На этапе 104 по меньшей мере один возможный вариант направления прямой линии, которая должна обнаруживаться, определяется согласно наборам признаков гистограммы градиентов соответствующих пиксельных точек.
[00104] На этапе 106 точное направление и точная позиция прямой линии, которая должна обнаруживаться, определяются согласно по меньшей мере одному возможному варианту направления.
[00105] В заключение, в способе для обнаружения прямой линии, предоставленном посредством настоящего варианта осуществления, посредством получения набора признаков гистограммы градиентов каждой из соответствующих пиксельных точек в изображении; определения по меньшей мере одного возможного варианта направления прямой линии, которая должна обнаруживаться, согласно наборам признаков гистограммы градиентов соответствующих пиксельных точек; и затем определения точного направления и точной позиции прямой линии, которая должна обнаруживаться, согласно по меньшей мере одному возможному варианту направления, при этом набор признаков гистограммы градиентов выполнен с возможностью отражать характеристики прямой линии локальной области, в которой расположена пиксельная точка, разрешается такая проблема в предшествующем уровне техники, что способ для обнаружения прямой линии может приводить к нарушению прямой линии и неточному результату обнаружения, когда контрастность края является слабой, или существуют шумовые помехи. По сравнению со связанным способом для обнаружения прямой линии в разделе "Уровень техники", способ для обнаружения прямой линии, предоставленный посредством настоящего варианта осуществления, ни использует преобразование Хафа, ни преобразует в двоичную форму изображение, за счет этого исключая влияние ошибок, вызываемых посредством преобразования в двоичную форму, и повышая точность обнаружения прямой линии.
[00106] Фиг. 2A является блок-схемой последовательности операций, показывающей способ для обнаружения прямой линии, согласно другому примерному варианту осуществления. Настоящий вариант осуществления иллюстрирует способ для обнаружения прямой линии, который должен применяться в электронном устройстве. Способ для обнаружения прямой линии может включать в себя следующие этапы.
[00107] На этапе 201 формируется полутоновое изображение для изображения.
[00108] До того, как обнаруживается прямая линия, электронное устройство сначала делает полутоновым собранное изображение, с тем чтобы формировать полутоновое изображение для изображения. Шкала полутонов классифицируется на 256 уровней, значение полутонов любой пиксельной точки (i, j) составляет I(i, j)ε[0, 255].
[00109] На этапе 202 получается набор признаков гистограммы градиентов соответствующих пиксельных точек в изображении.
[00110] Электронное устройство получает набор признаков гистограммы градиентов каждой из соответствующих пиксельных точек в изображении, набор признаков гистограммы градиентов выполнен с возможностью отражать характеристики прямой линии локальной области, в которой расположена пиксельная точка.
[00111] Этот этап может включать в себя следующие два подэтапа.
[00112] Во-первых, для каждой пиксельной точки (i, j) из соответствующих пиксельных точек вычисляется набор g(i, j) градиентов направления пиксельной точки.
[00113] Для каждой пиксельной точки (i, j) из соответствующих пиксельных точек электронное устройство вычисляет набор g(i, j) градиентов направления пиксельной точки. Набор градиентов направления одной пиксельной точки включает в себя значения градиентов направления пиксельной точки в K направлениях, и значение градиента направления пиксельной точки в любом направлении означает абсолютное значение разности между значением полутонов пиксельной точки и значением полутонов смежной пиксельной точки в направлении, K≥2. Значение K предварительно установлено согласно фактическим требованиям: чем больше значение K, тем более точным является результат обнаружения прямой линии. Чтобы уменьшать объем вычислений, значение K равно 4 или 8 при нормальных обстоятельствах.
[00114] Ссылаясь на фиг. 2B, предположим, что существует изображение I, размер изображения I составляет M*N (M, и N, соответственно, представляют число пиксельных точек в горизонтальном направлении и вертикальном направлении изображения I), M≥1, N≥1. Для любой пиксельной точки (i, j) в изображении I, i∈[0, M], j∈[0, N], набор градиентов направления, соответствующий пиксельной точке, составляет g(i, j).
[00115] Между тем, предполагается, что K=4, 4 направления, соответственно, представляют собой направления под углами в 0°, 45°, 90° и 135° к горизонтальному направлению, и значения градиентов направления пиксельной точки (i, j) в 4 направлениях, соответственно, записываются в качестве g0(i, j), g45(i, j), g90(i, j) и g135(i, j). В таком случае:
[00116] g(i, j)={g0(i, j), g45(i, j), g90(i, j), g135(i, j)}, при этом:
[00117] g0(i, j)=|I(i+1, j)-I(i, j)|;
[00118] g45(i, j)=|I(i-1, j-1)-I(i, j)|;
[00119] g90(i, j)=|I(i, j-1)-I(i, j)|;
[00120] g135(i, j)=|I(i+1, j-1)-I(i, j)|;
[00121] I(i, j) представляет значение полутонов пиксельной точки (i, j), I(i, j)∈[0, 255].
[00122] В практических вариантах применения, не могут учитываться граничные пиксельные точки в изображении, при этом граничные пиксельные точки означают пиксельные точки на четырех краях периферии изображения, например, пиксельные точки, содержащиеся в области за пределами черной рамки 21 на фиг. 2B.
[00123] Во-вторых, набор h(i, j) признаков гистограммы градиентов пиксельной точки вычисляется согласно набору g(i, j) градиентов направления пиксельной точки.
[00124] Электронное устройство вычисляет набор h(i, j) признаков гистограммы градиентов пиксельной точки согласно набору g(i, j) градиентов направления пиксельной точки.
[00125] Во-первых, следует понимать, что, если существует одна прямая линия в изображении, значения полутонов соответствующих пиксельных точек в направлении прямой линии изменяются медленно или не изменяются, но значения полутонов соответствующих пиксельных точек внезапно изменяются в направлении, перпендикулярном направлению прямой линии. Посредством использования этой характеристики, после того, как получается набор g(i, j) градиентов направления пиксельных точек, вводится набор h(i, j) признаков гистограммы градиентов пиксельной точки.
[00126] Набор h(i, j) признаков гистограммы градиентов пиксельной пинты отражает характеристики прямой линии локальной области, в которой расположена пиксельная точка, характеристики прямой линии включают в себя то, существует или нет прямая линия, которая должна обнаруживаться, и первый вид или все два вида приблизительных направлений прямой линии, которая должна обнаруживаться в локальной области, в которой расположена пиксельная точка. Приблизительное направление прямой линии, которая должна обнаруживаться, означает направление, к которому приближается прямая линия, которая должна обнаруживаться. Например, если направление, к которому приближается прямая линия, которая должна обнаруживаться, представляет собой окрестностный диапазон в 45°, приблизительное направление прямой линии, которая должна обнаруживаться, составляет 45°.
[00127] Вышеописанный второй подэтап дополнительно может включать в себя следующие несколько подэтапов.
[00128] (1) Соответственно вычисляются значения  локального градиента пиксельной точки в K направлениях.
локального градиента пиксельной точки в K направлениях.
[00129] Электронное устройство соответственно вычисляет значения локального градиента пиксельной точки в K направлениях, и k представляет направление. Значение локального градиента пиксельной точки (i, j) в k-направлении равно сумме значений градиентов направления всех пиксельных точек в k-направлении в локальной области, в которой расположена пиксельная точка. В настоящем варианте осуществления:
[00130]  , k∈{0, 45, 90, 135};
, k∈{0, 45, 90, 135};
[00131] где R является средним радиусом, значение R предварительно установлено согласно фактическим требованиям, например, R=4. Ссылаясь на фиг. 2B, значение R также определяет диапазон локальной области 22, в которой расположена пиксельная точка (i, j), и число пиксельных точек, содержащихся в локальной области 22, в которой расположена пиксельная точка (i, j), равно (2R+1)*(2R+1). Например, когда R=4, диапазон локальной области 22, в которой расположена пиксельная точка (i, j), представляет собой область, состоящую из 9*9=81 пиксельных точек, центрированных вокруг пиксельной точки (i, j).
[00132] (2) Вычисляется среднее значение hnorm(i, j) градиента пиксельной точки.
[00133] Электронное устройство вычисляет среднее значение hnorm(i, j) градиента пиксельной точки. Среднее значение hnorm(i, j) градиента равно извлечению корня суммы квадратов соответствующих значений  локального градиента пиксельной точки. В настоящем варианте осуществления:
локального градиента пиксельной точки. В настоящем варианте осуществления:
[00134] 
[00135] (3) Значение  локального градиента делится на среднее значение hnorm(i, j) градиента, чтобы получать признак hk(i, j) гистограммы градиентов пиксельной точки в k-направлении.
локального градиента делится на среднее значение hnorm(i, j) градиента, чтобы получать признак hk(i, j) гистограммы градиентов пиксельной точки в k-направлении.
[00136] Электронное устройство делит значение  локального градиента на среднее значение hnorm(i, j) градиента, чтобы получать признак hk(i, j) гистограммы градиентов пиксельной точки в k-направлении. В настоящем варианте осуществления:
локального градиента на среднее значение hnorm(i, j) градиента, чтобы получать признак hk(i, j) гистограммы градиентов пиксельной точки в k-направлении. В настоящем варианте осуществления:
[00137]  , k∈{0, 45, 90, 135}.
, k∈{0, 45, 90, 135}.
[00138] (4) Набор признаков гистограммы градиентов в K направлениях определяется в качестве набора h(i, j) признаков гистограммы градиентов пиксельной точки.
[00139] Электронное устройство определяет набор признаков гистограммы градиентов в K направлениях в качестве набора h(i, j) признаков гистограммы градиентов пиксельной точки. Набор признаков гистограммы градиентов пиксельной точки (i, j) h(i, j), и набор h(i, j) признаков гистограммы градиентов включают в себя признаки гистограммы градиентов пиксельной точки (i, j) в K направлениях. В настоящем варианте осуществления:
[00140] h(i, j)={h0(i, j), h45(i, j), h90(i, j), h135(i, j)}.
[00141] Как можно видеть, чем больше значение hk(i, j), тем более очевидными, как указано, являются изменения значений полутонов соответствующих пиксельных точек в k-направлении, и тем с большой вероятностью могут существовать внезапные изменения в значениях полутонов. На основе этого можно предполагать, что направление, перпендикулярное k-направлению, представляет собой приблизительное направление прямой линии, которая должна обнаруживаться.
[00142] Следует пояснить, что для того, чтобы уменьшать помехи от таких факторов, как шумы или освещение, и уменьшать объем вычислений, после того, как вычисляется среднее значение hnorm(i, j) градиента пиксельной точки, также может обнаруживаться то, меньше или нет среднее значение hnorm(i, j) градиента предварительно определенного среднего значения Tnorm. Если результат обнаружения заключается в том, что среднее значение hnorm(i, j) градиента меньше предварительно определенного среднего значения Tnorm, соответствующие признаки гистограммы градиентов в наборе h(i, j) признаков гистограммы градиентов пиксельной точки задаются равными нулю. Поскольку предварительно определенное среднее значение Tnorm отражает общее градиентное состояние локальной области, в которой расположена пиксельная точка в различных направлениях, и когда hnorm(i, j) является довольно небольшим, это означает то, что контрастность края в локальной области является слабой, изменение значений полутонов между смежными пиксельными точками может вызываться посредством таких факторов, как шумы или освещение, а не посредством существующей прямой линии, которая должна обнаруживаться в локальной области. Соответственно, когда hnorm(i, j) меньше предварительно определенного среднего значения Tnorm, соответствующие признаки гистограммы градиентов в наборе h(i, j) признаков гистограммы градиентов пиксельной точки задаются равными нулю.
[00143] На этапе 203 по меньшей мере один возможный вариант направления прямой линии, которая должна обнаруживаться, определяется согласно наборам признаков гистограммы градиентов соответствующих пиксельных точек.
[00144] Электронное устройство определяет по меньшей мере один возможный вариант направления прямой линии, которая должна обнаруживаться, согласно наборам признаков гистограммы градиентов соответствующих пиксельных точек.
[00145] Этот этап может включать в себя следующие несколько подэтапов.
[00146] Во-первых, для каждой из соответствующих пиксельных точек направление, соответствующее признаку гистограммы градиентов, имеющему максимальное значение в наборе признаков гистограммы градиентов, выбирается в качестве основного направления локальной области, в которой расположена пиксельная точка.
[00147] На этапе 202 представлено то, что чем больше значение hk(i, j), тем более очевидными, как указано, являются изменения значений полутонов соответствующих пиксельных точек в k-направлении, и тем с большой вероятностью могут возникать внезапные изменения в значениях полутонов. На основе этого можно предполагать, что направление, перпендикулярное k-направлению, представляет собой приблизительное направление прямой линии, которая должна обнаруживаться.
[00148] Таким образом, электронное устройство выбирает направление, соответствующее признаку гистограммы градиентов, имеющему максимальное значение в наборе h(i, j) признаков гистограммы градиентов, в качестве основного направления локальной области, в которой расположена пиксельная точка, и основное направление является непосредственно перпендикулярным направлению прямой линии в локальной области.
[00149] Во-вторых, проводятся статистические вычисления числа голосов основных направлений локальных областей, в которых расположены соответствующие пиксельные точки в K направлениях.
[00150] После определения основного направления локальной области, в которой расположена каждая пиксельная точка в изображении, электронное устройство проводит статистические вычисления числа голосов основных направлений локальных областей, в которых расположены соответствующие пиксельные точки в K направлениях, для всего графа.
[00151] Например, статистический результат может заключаться в том, что a из основных направлений локальной области, в которой расположена пиксельная точка, равно 0°, b из основного направления локальной области, в которой расположена пиксельная точка, равно 45°, c из основного направления локальной области, в которой расположена пиксельная точка, равно 90°, и d из основных направлений локальной области, в которой расположена пиксельная точка, равно 135°, при этом a, b, c и d соответственно являются числами голосов в четырех направлениях после того, как проведены статистические вычисления интегрального графа, и предполагается, что b>a>c>d.
[00152] В-третьих, направление, перпендикулярное направлению, имеющему число голосов, которое превышает пороговое значение числа голосов, выбирается в качестве возможных вариантов направлений прямой линии, которая должна обнаруживаться.
[00153] После проведения статистических вычислений числа голосов основных направлений локальных областей, в которых расположены соответствующие пиксельные точки в K направлениях, электронное устройство обнаруживает то, превышают или нет числа голосов в различных направлениях пороговое значение числа голосов. В практических вариантах применения значение для порогового значения числа голосов может задаваться с полным учетом таких факторов, как размер изображения, характеристики обработки данных электронного устройства и требования по точности обнаружения прямой линии.
[00154] В дальнейшем электронное устройство выбирает по меньшей мере одно направление, имеющее число голосов, которое превышает пороговое значение числа голосов, и использует направление, перпендикулярное выбранному направлению, в качестве возможного варианта направления прямой линии, которая должна обнаруживаться. Поскольку направление, имеющее число голосов, которое превышает пороговое значение числа голосов, отражает основное направление одной из соответствующих локальных областей в изображении, и основные направления соответствующих локальных областей являются непосредственно перпендикулярными прямой линии в изображении, в силу этого требуется выбирать направление, перпендикулярное направлению, имеющему число голосов, которое превышает пороговое значение числа голосов, в качестве возможного варианта направления прямой линии, которая должна обнаруживаться.
[00155] После этого этапа, при нормальных обстоятельствах, одно-два направления могут выбираться из K направлений в качестве возможных вариантов направлений прямой линии, которая должна обнаруживаться. На следующих этапах электронное устройство в итоге определяет точное направление и точную позицию прямой линии, которая должна обнаруживаться, посредством вычисления и анализа на шкале приблизительного отсчета и шкале точного отсчета.
[00156] В настоящем варианте осуществления предполагается, что b>пороговое значение числа голосов>a>c>d, и основное направление, соответствующее числу голосов b, составляет 45°, так что направление 135° выбирается в качестве возможного варианта направления прямой линии, которая должна обнаруживаться.
[00157] На этапе 204 для каждого из возможных вариантов направлений формируется по меньшей мере одна линия сканирования, параллельная возможному варианту направления.
[00158] Для каждого из возможных вариантов направлений электронное устройство формирует по меньшей мере одну линию сканирования, параллельную возможному варианту направления. Ссылаясь на фиг. 2C, прямая линия L в изображении, имеющем размер M*N, показана на фиг. 2C. После этапов 201-203 можно определять то, что возможный вариант направления прямой линии, которая должна обнаруживаться, составляет 135°. Линии 26 сканирования в направлении 135° представляют собой полное изображение, расстояние между смежными линиями 26 сканирования может задаваться с полным учетом таких факторов, как размер изображения, вероятность обработки данных электронного устройства и требования по точности обнаружения прямой линии.
[00159] На этапе 205 соответственно вычисляется совпадающее расстояние каждой линии сканирования.
[00160] Электронное устройство соответственно вычисляет совпадающее расстояние каждой линии сканирования, и совпадающее расстояние линии сканирования выполнено с возможностью отражать степень близости линии сканирования к прямой линии, которая должна обнаруживаться. Например, этот этап включает в себя следующие несколько подэтапов.
[00161] Во-первых, для каждой линии сканирования n точек выборки получаются посредством дискретизации на линии сканирования, и n≥1.
[00162] Для каждой линии сканирования электронное устройство получает n точек выборки посредством дискретизации на линии сканирования, и n≥1. Альтернативно, электронное устройство получает n точек выборки посредством равномерной дискретизации на каждой линии сканирования. Ссылаясь на фиг. 2C, в настоящем варианте осуществления, предполагается, что электронное устройство получает 10 точек 27 выборки посредством равномерной дискретизации на каждой линии сканирования.
[00163] Во-вторых, вычисляется совпадающее расстояние между набором признаков гистограммы градиентов для каждой из соответствующих точек выборки и набором признаков гистограммы градиентов шаблонов в направлении, перпендикулярном возможному варианту направления.
[00164] Электронное устройство вычисляет совпадающее расстояние между набором признаков гистограммы градиентов для каждой из соответствующих точек выборки и набором признаков гистограммы градиентов шаблонов в направлении, перпендикулярном возможному варианту направления. На вышеописанном этапе 202 электронное устройство получает набор признаков гистограммы градиентов соответствующих пиксельных точек в изображении. В это время электронное устройство ищет и получает набор признаков гистограммы градиентов соответствующих точек выборки из набора признаков гистограммы градиентов соответствующих пиксельных точек согласно координатам соответствующих точек выборки.
[00165] Набор признаков гистограммы градиентов шаблонов является Templates∈{0, 45, 90, 135}. В возможной реализации:
[00166] Template0={1, 0, 0, 0};
[00167] Template45={0, 1, 0, 0};
[00168] Template90={0, 0, 1, 0};
[00169] Template135={0, 0, 0, 1}.
[00170] Помимо этого, в настоящем варианте осуществления, предполагается, что полученные n точек выборки, соответственно, составляют (x0, y0), (x1, y1), …, (xi, yi), …, (xn-1, yn-1). Затем совпадающее расстояние между набором признаков гистограммы градиентов точки выборки (xi, yi) и набором признаков гистограммы градиентов шаблонов в направлении, перпендикулярном возможному варианту направления, составляет dist[h(xi, yi), Templates]=dist[h(xi, yi), Template45]=|h0(xi, yi)-0|+|h45(xi, yi)-1|+|h90(xi, yi)-0|+|h135(xi, yi)-0|.
[00171] В-третьих, совпадающие расстояния n точек выборки суммируются для того, чтобы получать совпадающее расстояние линии сканирования.
[00172] Электронное устройство суммирует совпадающие расстояния n точек выборки, чтобы получать совпадающее расстояние линии сканирования. Совпадающее расстояние линии сканирования составляет dist (линия сканирования) =  .
.
[00173] На этапе 206 линия сканирования, имеющая минимальное совпадающее расстояние, выбирается в качестве возможного варианта прямой линии.
[00174] После вычисления совпадающих расстояний соответствующих линий сканирования электронное устройство выбирает линию сканирования, имеющую минимальное совпадающее расстояние, в качестве возможного варианта прямой линии. Ссылаясь на фиг. 3C, в настоящем варианте осуществления предполагается, что линия сканирования, которая проходит через две точки O и P, является линией сканирования, имеющей минимальное совпадающее расстояние, т.е. линия сканирования, которая проходит через O и P, выбирается в качестве возможного варианта прямой линии.
[00175] Ссылаясь на фиг. 2C, можно видеть, что после того, как определяется возможный вариант прямой линии, может быть примерно определена близлежащая позиция прямой линии L, которая должна обнаруживаться в изображении. Затем точное направление и точная позиция прямой линии L, которая должна обнаруживаться в изображении, в завершение определяются посредством вычисления и анализа на шкале точного отсчета на следующем этапе 207.
[00176] На этапе 207 конкретное направление и позиция прямой линии, которая должна обнаруживаться, определяются согласно возможному варианту прямой линии.
[00177] Электронное устройство определяет конкретное направление и позицию прямой линии, которая должна обнаруживаться, согласно возможному варианту прямой линии.
[00178] Этот этап может включать в себя следующие несколько подэтапов.
[00179] Во-первых, с использованием возможного варианта прямой линии в качестве центральной оси формируется прямоугольная область, имеющая предварительно определенный размер.
[00180] Электронное устройство формирует прямоугольную область, имеющую предварительно определенный размер, посредством использования возможного варианта прямой линии в качестве центральной оси. Ссылаясь на фиг. 3C, две точки O и P могут выбираться на возможном варианте прямой линии, длина сегмента OP линии является длиной прямоугольной области. В практических вариантах применения длина сегмента OP линии должна выбираться максимально большой. После этого создаются вертикальные сегменты AB и CD линии, которые, соответственно, проходят через две точки O и P возможного варианта прямой линии, при этом точка O является средней точкой сегмента AB линии, а точка P является средней точкой сегмента CD линии. Длины сегментов AB и CD линии являются ширинами прямоугольной области. В практических вариантах применения длины сегментов AB и CD линии могут выбираться в два раза большими расстояния между смежными линиями сканирования.
[00181] Во-вторых, на двух сторонах прямоугольной области, перпендикулярной возможному варианту прямой линии, соответственно выбраны u точек и v точек, и каждые две точки на двух сторонах соединены, чтобы получать u*v сегментов линии, u≥1, v≥1.
[00182] При нормальных обстоятельствах u и v могут выбираться равными значениями, например, u=v=8. В это время 8*8=64 сегмента линии могут получаться посредством соединения каждых двух точек на двух сторонах.
[00183] В-третьих, соответственно вычисляется совпадающее расстояние каждого сегмента линии из u*v сегментов линии.
[00184] Электронное устройство соответственно вычисляет совпадающее расстояние каждого сегмента линии из u*v сегментов линии. Совпадающее расстояние сегмента линии выполнено с возможностью отражать степень близости сегмента линии к прямой линии, которая должна обнаруживаться. Чем меньше совпадающее расстояние сегмента линии, тем больше, как указано, сегмент линии приближается к прямой линии, которая должна обнаруживаться; наоборот, чем больше совпадающее расстояние сегмента линии, тем больше, как указано, сегмент линии смещается от прямой линии, которая должна обнаруживаться.
[00185] Аналогично вычислению совпадающего расстояния линии сканирования, для каждого сегмента линии из u*v сегментов линии, несколько точек выборки получаются посредством дискретизации на сегменте линии, вычисляется совпадающее расстояние между набором признаков гистограммы градиентов для каждой из соответствующих точек выборки и набором признаков гистограммы градиентов шаблонов сегмента линии в фактическом направлении, и совпадающие расстояния n точек выборки суммируются для того, чтобы получать совпадающее расстояние сегмента линии. Набор признаков гистограммы градиентов шаблонов сегмента линии в фактическом направлении может распределять размеры соответствующих признаков гистограммы градиентов в наборе признаков гистограммы градиентов шаблонов согласно проекционным расстояниям сегмента линии в K направлениях посредством добавления весовых коэффициентов.
[00186] В-четвертых, прямая линия, которой принадлежит сегмент линии, имеющий минимальное совпадающее расстояние, выбирается в качестве прямой линии, которая должна обнаруживаться.
[00187] После вычисления совпадающих расстояний соответствующих сегментов линии электронное устройство выбирает прямую линию, которой принадлежит сегмент линии, имеющий минимальное совпадающее расстояние, в качестве прямой линии, которая должна обнаруживаться.
[00188] Кроме того, если допустимо с точки зрения вероятности вычисления и обработки электронного устройства, электронное устройство может выбирать большие значения u и v, с тем чтобы более точно определять точное направление и позицию прямой линии, которая должна обнаруживаться.
[00189] На вышеописанных этапах 201-207 подробно представлено обнаружение прямой линии в изображении. По сравнению со связанным способом для обнаружения прямой линии в разделе "Уровень техники", способ для обнаружения прямой линии, предоставленный посредством настоящего варианта осуществления, ни использует преобразование Хафа, ни преобразует в двоичную форму изображение, за счет этого исключая влияние ошибок, вызываемых посредством преобразования в двоичную форму, и повышая точность обнаружения прямой линии. В дальнейшем в этом документе подробно представляется то, как обнаруживать прямоугольник в изображении, на основе способа для обнаружения прямой линии, предоставленного посредством настоящего варианта осуществления.
[00190] На этапе 208 для любой прямой линии, которая должна обнаруживаться, обнаруживается то, существует или нет в изображении вторая прямая линия, которая должна обнаруживаться, которая удовлетворяет первому предварительно определенному условию.
[00191] Для любой прямой линии, которая должна обнаруживаться, электронное устройство обнаруживает то, существует или нет в изображении вторая прямая линия, которая должна обнаруживаться, которая удовлетворяет первому предварительно определенному условию. Способ, используемый посредством электронного устройства для того, чтобы обнаруживать и получать вторую прямую линию, которая должна обнаруживаться, из изображения, может означать способ для обнаружения прямой линии, приспосабливаемый на этапах 201-207. После того, как обнаруживается и получается вторая прямая линия, которая должна обнаруживаться, продолжает обнаруживаться то, удовлетворяют или нет каждая из вторых прямых линий, которые должны обнаруживаться, первому предварительно определенному условию. Первое предварительно определенное условие включает в себя то, что вторая прямая линия, которая должна обнаруживаться, и прямая линия, которая должна обнаруживаться, имеют точку пересечения внутри изображения, и угол между ними меньше порогового значения угла.
[00192] Угол между двумя прямыми линиями может вычисляться с помощью следующей формулы: angleθ=|arctan(aL1)-arctan(aL2)|, где aL1 и aL2 соответственно являются наклонами прямой линии L1 и прямой линии L2. Пороговое значение угла может задаваться приблизительно, т.е., например, 3 радиана.
[00193] На этапе 209, если результат обнаружения заключается в том, что вторая прямая линия, которая должна обнаруживаться, которая удовлетворяет первому предварительно определенному условию, существует, вторая прямая линия, которая должна обнаруживаться, добавляется в набор возможных вариантов прямых линий.
[00194] Если результат обнаружения заключается в том, что вторая прямая линия, которая должна обнаруживаться, которая удовлетворяет первому предварительно определенному условию, существует, электронное устройство добавляет вторую прямую линию, которая должна обнаруживаться, в набор возможных вариантов прямых линий для прямой линии, которая должна обнаруживаться. Набор возможных вариантов прямых линий для прямой линии, которая должна обнаруживаться, включает в себя все вторые прямые линии, которые должны обнаруживаться, которые удовлетворяют первому предварительно определенному условию.
[00195] На этапе 210 для любых двух из вторых прямых линий, которые должны обнаруживаться в наборе возможных вариантов прямых линий, обнаруживается то, существует или нет третья прямая линия, которая должна обнаруживаться, которая удовлетворяет второму предварительно определенному условию.
[00196] Для любых двух из вторых прямых линий, которые должны обнаруживаться в наборе возможных вариантов прямых линий, электронное устройство обнаруживает то, существует или нет третья прямая линия, которая должна обнаруживаться, которая удовлетворяет второму предварительно определенному условию. Второе предварительно определенное условие включает в себя то, что третья прямая линия, которая должна обнаруживаться, отличается от прямой линии, которая должна обнаруживаться, и третья прямая линия, которая должна обнаруживаться, пересекает обе из двух вторых прямых линий, которые должны обнаруживаться, с двумя точками пересечения внутри изображения.
[00197] На этапе 211, если результат обнаружения заключается в том, что третья прямая линия, которая должна обнаруживаться, которая удовлетворяет второму предварительно определенному условию, существует, четырехугольник, состоящий из прямой линии, которая должна обнаруживаться, двух вторых прямых линий, которые должны обнаруживаться, и третьей прямой линии, которая должна обнаруживаться, добавляется в набор возможных вариантов прямоугольников.
[00198] Если результат обнаружения заключается в том, что третья прямая линия, которая должна обнаруживаться, которая удовлетворяет второму предварительно определенному условию, существует, четырехугольник, состоящий из прямой линии, которая должна обнаруживаться, электронное устройство добавляет четырехугольник, состоящий из прямой линии, которая должна обнаруживаться, двух вторых прямых линий, которые должны обнаруживаться, и третьей прямой линии, которая должна обнаруживаться, в набор возможных вариантов прямоугольников. Набор возможных вариантов прямоугольников содержит все четырехугольники, которые с большой вероятностью должны становиться прямоугольниками, которые должны обнаруживаться.
[00199] На этапе 212 для каждого четырехугольника в наборе возможных вариантов прямоугольников вычисляется совпадающее расстояние прямоугольника.
[00200] Для каждого четырехугольника в наборе возможных вариантов прямоугольников электронное устройство вычисляет совпадающее расстояние прямоугольника. Совпадающее расстояние четырехугольника выполнено с возможностью отражать степень близости четырехугольника к прямоугольнику, который должен обнаруживаться, и чем меньше совпадающее расстояние прямоугольника, тем больше, как указано, прямоугольник приближается к прямоугольнику, который должен обнаруживаться, и наоборот, чем больше совпадающее расстояние прямоугольника, тем больше, как указано, прямоугольник смещается от прямоугольника, который должен обнаруживаться.
[00201] Совпадающее расстояние прямоугольника равно сумме совпадающих расстояний сегментов линии, соответствующих четырем сторонам прямоугольника. Совпадающее расстояние сегмента линии, соответствующего любой стороне прямоугольника, может означать способ на третьем подэтапе на вышеописанном этапе 207, что не описывается повторно в данном документе.
[00202] На этапе 213 прямоугольник, имеющий минимальное совпадающее расстояние или совпадающее расстояние, меньшее порогового значения для определения совпадения, определяется в качестве прямоугольника, который должен обнаруживаться.
[00203] Электронное устройство определяет прямоугольник, имеющий минимальное совпадающее расстояние или совпадающее расстояние, меньшее порогового значения для определения совпадения, в качестве прямоугольника, который должен обнаруживаться.
[00204] В заключение, в способе для обнаружения прямой линии, предоставленном посредством настоящего варианта осуществления, посредством получения набора признаков гистограммы градиентов каждой из соответствующих пиксельных точек в изображении; определения по меньшей мере одного возможного варианта направления прямой линии, которая должна обнаруживаться, согласно наборам признаков гистограммы градиентов соответствующих пиксельных точек; и затем определения точного направления и позиции прямой линии, которая должна обнаруживаться, согласно по меньшей мере одному возможному варианту направления, при этом набор признаков гистограммы градиентов выполнен с возможностью отражать характеристики прямой линии локальной области, в которой расположена пиксельная точка, разрешается такая проблема в предшествующем уровне техники, что способ для обнаружения прямой линии может приводить к нарушению прямой линии и неточному результату обнаружения, когда контрастность края является слабой, или существуют шумовые помехи. По сравнению со связанным способом для обнаружения прямой линии в разделе "Уровень техники", способ для обнаружения прямой линии, предоставленный посредством настоящего варианта осуществления, ни использует преобразование Хафа, ни преобразует в двоичную форму изображение, за счет этого исключая влияние ошибок, вызываемых посредством преобразования в двоичную форму, и повышая точность обнаружения прямой линии.
[00205] Помимо этого, настоящий вариант осуществления дополнительно предоставляет способ для обнаружения прямоугольника на основе обнаружения прямой линии. После того, как составлены все прямоугольники, которые с большой вероятностью должны становиться прямоугольниками, которые должны обнаруживаться, посредством вычисления совпадающих расстояний соответствующих прямоугольников, соответственно, и определения прямоугольника, имеющего минимальное совпадающее расстояние или совпадающее расстояние, меньшее порогового значения для определения совпадения, в качестве прямоугольника, который должен обнаруживаться, реализовано обнаружение прямоугольной формы, такой как карта, квитанция или книга в изображении, и расширен диапазон фактических вариантов применения способа для обнаружения прямой линии и способа для обнаружения прямоугольника, предоставленных посредством настоящего раскрытия сущности.
[00206] Ниже приводятся варианты осуществления устройства настоящего раскрытия сущности, которое может быть выполнено с возможностью осуществлять варианты осуществления способа настоящего раскрытия сущности. Для получения дополнительной информации, не раскрытой в вариантах осуществления устройства настоящего раскрытия сущности, смотри варианты осуществления способа настоящего раскрытия сущности.
[00207] Фиг. 3 является схемой, показывающей устройство для обнаружения прямой линии, согласно примерному варианту осуществления. Устройство для обнаружения прямой линии может реализовываться в качестве всего или части электронного устройства посредством программного обеспечения, аппаратных средств или комбинации вышеозначенного. Устройство для обнаружения прямой линии может включать в себя модуль 310 получения признаков, модуль 320 определения возможных вариантов и модуль 330 определения точных показателей.
[00208] Модуль 310 получения признаков выполнен с возможностью получать набор признаков гистограммы градиентов каждой из соответствующих пиксельных точек в изображении, при этом набор признаков гистограммы градиентов выполнен с возможностью отражать характеристики прямой линии локальной области, в которой расположена пиксельная точка.
[00209] Модуль 320 определения возможных вариантов выполнен с возможностью определять по меньшей мере один возможный вариант направления прямой линии, которая должна обнаруживаться, согласно наборам признаков гистограммы градиентов соответствующих пиксельных точек.
[00210] Модуль 330 определения точных показателей выполнен с возможностью определять точное направление и точную позицию прямой линии, которая должна обнаруживаться, согласно по меньшей мере одному возможному варианту направления.
[00211] В заключение, в устройстве для обнаружения прямой линии, предоставленном посредством настоящего варианта осуществления, посредством получения набора признаков гистограммы градиентов каждой из соответствующих пиксельных точек в изображении; определения по меньшей мере одного возможного варианта направления прямой линии, которая должна обнаруживаться, согласно наборам признаков гистограммы градиентов соответствующих пиксельных точек; и затем определения точного направления и точной позиции прямой линии, которая должна обнаруживаться, согласно по меньшей мере одному возможному варианту направления, при этом набор признаков гистограммы градиентов выполнен с возможностью отражать характеристики прямой линии локальной области, в которой расположена пиксельная точка, разрешается такая проблема в предшествующем уровне техники, что способ для обнаружения прямой линии может приводить к нарушению прямой линии и неточному результату обнаружения, когда контрастность края является слабой, или существуют шумовые помехи. Кроме того, способ для обнаружения прямой линии, предоставленный посредством настоящего варианта осуществления, ни использует преобразование Хафа, ни преобразует в двоичную форму изображение, за счет этого в достаточной степени исключая влияние ошибок, вызываемых посредством преобразования в двоичную форму, и повышая точность обнаружения прямой линии.
[00212] Фиг. 4 является схемой, показывающей устройство для обнаружения прямой линии, согласно другому примерному варианту осуществления. Устройство для обнаружения прямой линии может реализовываться в качестве всего или части электронного устройства посредством программного обеспечения, аппаратных средств или комбинации вышеозначенного. Устройство для обнаружения прямой линии может включать в себя модуль 310 получения признаков, модуль 320 определения возможных вариантов, модуль 330 определения точных показателей, первый модуль 332 обнаружения, модуль 334 возможных вариантов прямых линий, второй модуль 336 обнаружения, модуль 338 возможных вариантов прямоугольников, модуль 340 вычисления совпадения и модуль 342 определения прямоугольников.
[00213] Модуль 310 получения признаков выполнен с возможностью получать набор признаков гистограммы градиентов каждой из соответствующих пиксельных точек в изображении, при этом набор признаков гистограммы градиентов выполнен с возможностью отражать характеристики прямой линии локальной области, в которой расположена пиксельная точка.
[00214] Модуль 310 получения признаков включает в себя блок 310a вычисления градиентов и блок 310b вычисления признаков.
[00215] Блок 310a вычисления градиентов выполнен с возможностью, для каждой пиксельной точки (i, j) из соответствующих пиксельных точек, вычислять набор g(i, j) градиентов направления пиксельной точки, при этом набор g(i, j) градиентов направления включает в себя значения градиентов направления пиксельной точки в K направлениях. Значение градиента направления пиксельной точки в любом направлении означает абсолютное значение разности между значением полутонов пиксельной точки и значением полутонов смежной пиксельной точки в направлении, K≥2.
[00216] Блок 310b вычисления признаков выполнен с возможностью вычислять набор h(i, j) признаков гистограммы градиентов пиксельной точки согласно набору g(i, j) градиентов направления пиксельной точки.
[00217] Блок 310b вычисления признаков включает в себя субблок 310b1 вычисления локальных градиентов, субблок 310b2 вычисления средних градиентов, субблок 310b3 обнаружения средних значений, субблок 310b4 задания признаков равными нулю, субблок 310b5 вычисления признаков и субблок 310b6 определения признаков.
[00218] Субблок 310b1 вычисления локальных градиентов выполнен с возможностью соответственно вычислять значения  локального градиента пиксельной точки в K направлениях, при этом значение локального градиента в k-направлении равно сумме значений градиентов направления всех пиксельных точек в k-направлении в локальной области, в которой расположена пиксельная точка, и при этом k представляет направление.
локального градиента пиксельной точки в K направлениях, при этом значение локального градиента в k-направлении равно сумме значений градиентов направления всех пиксельных точек в k-направлении в локальной области, в которой расположена пиксельная точка, и при этом k представляет направление.
[00219] Субблок 310b2 вычисления средних градиентов выполнен с возможностью вычислять среднее значение hnorm(i, j) градиента пиксельной точки, при этом среднее значение hnorm(i, j) градиента равно извлечению корня суммы квадратов соответствующих значений  локального градиента пиксельной точки.
локального градиента пиксельной точки.
[00220] Субблок 310b3 обнаружения средних значений выполнен с возможностью, для каждой пиксельной точки (i, j) из соответствующих пиксельных точек, обнаруживать то, меньше или нет среднее значение hnorm(i, j) градиента предварительно определенного среднего значения Tnorm.
[00221] Субблок 310b4 задания признаков равными нулю выполнен с возможностью задавать соответствующие признаки гистограммы градиентов в наборе h(i, j) признаков гистограммы градиентов пиксельной равными нулю, если результат обнаружения заключается в том, что среднее значение hnorm(i, j) градиента меньше предварительно определенного среднего значения Tnorm.
[00222] Субблок 310b5 вычисления признаков выполнен с возможностью делить значение  локального градиента на среднее значение hnorm(i, j) градиента, чтобы получать признак hk(i, j) гистограммы градиентов пиксельной точки в k-направлении.
локального градиента на среднее значение hnorm(i, j) градиента, чтобы получать признак hk(i, j) гистограммы градиентов пиксельной точки в k-направлении.
[00223] Субблок 310b6 определения признаков выполнен с возможностью определять набор признаков гистограммы градиентов в K направлениях в качестве набора h(i, j) признаков гистограммы градиентов пиксельной точки.
[00224] Модуль 320 определения возможных вариантов выполнен с возможностью определять по меньшей мере один возможный вариант направления прямой линии, которая должна обнаруживаться, согласно наборам признаков гистограммы градиентов соответствующих пиксельных точек.
[00225] Модуль 320 определения возможных вариантов включает в себя блок 320a выбора направлений, блок 320b статистических вычислений числа голосов и блок 320c выбора возможных вариантов.
[00226] Блок 320a выбора направлений выполнен с возможностью, для каждой из соответствующих пиксельных точек, выбирать направление, соответствующее признаку гистограммы градиентов, имеющему максимальное значение в наборе признаков гистограммы градиентов, в качестве основного направления локальной области, в которой расположена пиксельная точка.
[00227] Блок 320b статистических вычислений числа голосов выполнен с возможностью проводить статистические вычисления числа голосов основных направлений локальных областей, в которых расположены соответствующие пиксельные точки в K направлениях.
[00228] Блок 320c выбора возможных вариантов выполнен с возможностью выбирать направление, перпендикулярное направлению, имеющему число голосов, которое превышает пороговое значение числа голосов, в качестве возможного варианта направления прямой линии, которая должна обнаруживаться.
[00229] Модуль 330 определения точных показателей выполнен с возможностью определять точное направление и точную позицию прямой линии, которая должна обнаруживаться, согласно по меньшей мере одному возможному варианту направления.
[00230] Модуль 330 определения точных показателей включает в себя блок 330a формирования сканирования, блок 330b вычисления совпадения сканирования, блок 330c выбора сканирования и блок 330d определения точных показателей.
[00231] Блок 330a формирования сканирования выполнен с возможностью, для каждого из возможных вариантов направлений, формировать по меньшей мере одну линию сканирования, параллельную возможному варианту направления.
[00232] Блок 330b вычисления совпадения сканирования выполнен с возможностью соответственно вычислять совпадающее расстояние каждой линии сканирования, при этом совпадающее расстояние линии сканирования выполнено с возможностью отражать степень близости линии сканирования к прямой линии, которая должна обнаруживаться.
[00233] Блок 330b вычисления совпадения сканирования включает в себя субблок 330b1 получения выборок, субблок 330b2 вычисления совпадения выборок и субблок 330b3 суммирования совпадающих расстояний выборок.
[00234] Субблок 330b1 получения выборок выполнен с возможностью, для каждой из линий сканирования, получения n точек выборки посредством дискретизации на линии сканирования, n≥1.
[00235] Субблок 330b2 вычисления совпадения выборок выполнен с возможностью вычислять совпадающее расстояние между набором признаков гистограммы градиентов для каждой из соответствующих точек выборки и набором признаков гистограммы градиентов шаблонов в направлении, перпендикулярном возможному варианту направления.
[00236] Субблок 330b3 суммирования совпадающих расстояний выборок выполнен с возможностью суммировать совпадающие расстояния n точек выборки, чтобы получать совпадающее расстояние линии сканирования.
[00237] Блок 330c выбора сканирования выполнен с возможностью выбирать линию сканирования, имеющую минимальное совпадающее расстояние, в качестве возможного варианта прямой линии.
[00238] Блок 330d определения точных показателей выполнен с возможностью определять точное направление и точную позицию прямой линии, которая должна обнаруживаться, согласно возможному варианту прямой линии.
[00239] Блок 330d определения точных показателей включает в себя субблок 330d1 формирования прямоугольников, субблок 330d2 формирования сегментов линии, субблок 330d3 вычисления совпадения сегментов линии и субблок 330d4 выбора сегментов линии.
[00240] Субблок 330d1 формирования прямоугольников выполнен с возможностью формировать прямоугольную область, имеющую предварительно определенный размер, посредством использования возможного варианта прямой линии в качестве центральной оси.
[00241] Субблок 330d2 формирования сегментов линии выполнен с возможностью соответственно выбирать u точек и v точек на двух сторонах прямоугольной области, перпендикулярной возможному варианту прямой линии, и соединять каждые две точки на двух сторонах, с тем чтобы получать u*v сегментов линии, u≥1, v≥1.
[00242] Субблок 330d3 вычисления совпадения сегментов линии выполнен с возможностью соответственно вычислять совпадающее расстояние каждого сегмента линии из u*v сегментов линии, при этом совпадающее расстояние сегмента линии выполнено с возможностью отражать степень близости сегмента линии к прямой линии, которая должна обнаруживаться.
[00243] Субблок 330d4 выбора сегментов линии выполнен с возможностью выбирать прямую линию, которой принадлежит сегмент линии, имеющий минимальное совпадающее расстояние, в качестве прямой линии, которая должна обнаруживаться.
[00244] Первый модуль 332 обнаружения выполнен с возможностью, для любой прямой линии, которая должна обнаруживаться, обнаруживать то, существует или нет в изображении вторая прямая линия, которая должна обнаруживаться, которая удовлетворяет первому предварительно определенному условию, при этом первое предварительно определенное условие включает в себя то, что вторая прямая линия, которая должна обнаруживаться, и прямая линия, которая должна обнаруживаться, имеют точку пересечения внутри изображения, и угол между ними меньше порогового значения угла.
[00245] Модуль 334 возможных вариантов прямых линий выполнен с возможностью добавлять вторую прямую линию, которая должна обнаруживаться, в набор возможных вариантов прямых линий, если результат обнаружения заключается в том, что вторая прямая линия, которая должна обнаруживаться, которая удовлетворяет первому предварительно определенному условию, существует.
[00246] Второй модуль 336 обнаружения выполнен с возможностью, для любых двух из вторых прямых линий, которые должны обнаруживаться в наборе возможных вариантов прямых линий, обнаруживать то, существует или нет третья прямая линия, которая должна обнаруживаться, которая удовлетворяет второму предварительно определенному условию, при этом второе предварительно определенное условие включает в себя то, что третья прямая линия, которая должна обнаруживаться, отличается от прямой линии, которая должна обнаруживаться, и третья прямая линия, которая должна обнаруживаться, пересекает обе из двух вторых прямых линий, которые должны обнаруживаться, с двумя точками пересечения внутри изображения.
[00247] Модуль 338 возможных вариантов прямоугольников выполнен с возможностью добавлять четырехугольник, состоящий из прямой линии, которая должна обнаруживаться, двух вторых прямых линий, которые должны обнаруживаться, и третьей прямой линии, которая должна обнаруживаться, в набор возможных вариантов прямоугольников, если результат обнаружения заключается в том, что третья прямая линия, которая должна обнаруживаться, которая удовлетворяет второму предварительно определенному условию, существует.
[00248] Модуль 340 вычисления совпадения выполнен с возможностью, для каждого четырехугольника в наборе возможных вариантов прямоугольников, вычислять совпадающее расстояние прямоугольника, при этом совпадающее расстояние четырехугольника выполнено с возможностью отражать степень близости четырехугольника к прямоугольнику, который должен обнаруживаться, и совпадающее расстояние четырехугольника равно сумме совпадающих расстояний сегментов линии, соответствующих четырем сторонам четырехугольника.
[00249] Модуль 342 определения прямоугольников выполнен с возможностью определять четырехугольник, имеющий минимальное совпадающее расстояние или совпадающее расстояние, меньшее порогового значения для определения совпадения, в качестве прямоугольника, который должен обнаруживаться.
[00250] В заключение, в устройстве для обнаружения прямой линии, предоставленном посредством настоящего варианта осуществления, посредством получения набора признаков гистограммы градиентов каждой из соответствующих пиксельных точек в изображении; определения по меньшей мере одного возможного варианта направления прямой линии, которая должна обнаруживаться, согласно наборам признаков гистограммы градиентов соответствующих пиксельных точек; и затем определения точного направления и точной позиции прямой линии, которая должна обнаруживаться, согласно по меньшей мере одному возможному варианту направления, при этом набор признаков гистограммы градиентов выполнен с возможностью отражать характеристики прямой линии локальной области, в которой расположена пиксельная точка, разрешается такая проблема в предшествующем уровне техники, что способ для обнаружения прямой линии может приводить к нарушению прямой линии и неточному результату обнаружения, когда контрастность края является слабой, или существуют шумовые помехи. Кроме того, способ для обнаружения прямой линии, предоставленный посредством настоящего варианта осуществления, ни использует преобразование Хафа, ни преобразует в двоичную форму изображение, за счет этого в достаточной степени исключая влияния ошибок, вызываемых посредством преобразования в двоичную форму, и повышая точность обнаружения прямой линии.
[00251] Помимо этого, настоящий вариант осуществления дополнительно предоставляет устройство для обнаружения прямоугольника на основе обнаружения прямой линии. После того, как составлены все прямоугольники, которые с большой вероятностью должны становиться прямоугольниками, которые должны обнаруживаться, посредством вычисления совпадающих расстояний соответствующих прямоугольников, соответственно, и определения прямоугольника, имеющего минимальное совпадающее расстояние или совпадающее расстояние, меньшее порогового значения для определения совпадения, в качестве прямоугольника, который должен обнаруживаться, реализовано обнаружение прямоугольной формы, такой как карта, квитанция или книга в изображении, и расширен диапазон фактических вариантов применения устройства для обнаружения прямой линии и устройства для обнаружения прямоугольника, предоставленных посредством настоящего раскрытия сущности.
[00252] Следует пояснить, что когда устройство для обнаружения прямой линии, предоставленное в вышеописанных вариантах осуществления, обнаруживает прямую линию в изображении, разделение модулей с вышеуказанными функциями описывается только для иллюстрации. В фактических вариантах применения вышеуказанные функции могут реализовываться посредством различных модулей по мере необходимости. Иными словами, внутренняя структура устройства разделена на различные модули, чтобы реализовывать все или часть вышеописанных функций. Помимо этого, устройства для обнаружения прямой линии, предоставленные посредством вышеописанных вариантов осуществления, принадлежат идее изобретения, идентичной идее вариантов осуществления для способов для обнаружения прямой линии, и их конкретные процессы реализации содержатся в вариантах осуществления способов, которые повторно не описываются.
[00253] Фиг. 5 является блок-схемой устройства 500, которое выполнено с возможностью обнаруживать прямую линию, согласно примерному варианту осуществления. Например, устройство 500 может представлять собой мобильный телефон, компьютер, цифровой широковещательный терминал, устройство для обмена сообщениями, игровую приставку, планшетный компьютер, медицинское устройство, тренажерное оборудование, персональное цифровое устройство и т.п.
[00254] Ссылаясь на фиг. 5, устройство 500 может включать в себя один или более из следующих компонентов: компонент 502 обработки, запоминающее устройство 504, компонент 506 питания, мультимедийный компонент 508, аудиокомпонент 510, интерфейс 512 ввода-вывода, сенсорный компонент 514 и компонент 516 связи.
[00255] Компонент 502 обработки обычно полностью управляет работой устройства 500, к примеру, операциями, ассоциированными с отображением, телефонными вызовами, передачей данных, операциями камеры и операциями записи. Компонент 502 обработки может включать в себя один или более процессоров 520 для того, чтобы выполнять инструкции, чтобы выполнять все или часть этапов в вышеописанных способах. Кроме того, компонент 502 обработки может включать в себя один или более модулей, которые упрощают взаимодействие между компонентом 502 обработки и другими компонентами. Например, компонент 502 обработки может включать в себя мультимедийный модуль для того, чтобы упрощать взаимодействие между мультимедийным компонентом 508 и компонентом 502 обработки.
[00256] Запоминающее устройство 504 выполнено с возможностью сохранять различные типы данных для того, чтобы поддерживать работу устройства 500. Примеры таких данных включают в себя инструкции для любого приложения или способа, работающего на устройстве 500, контактные данные, данные телефонной книги, сообщения, изображения, видео и т.д. Запоминающее устройство 504 может реализовываться с использованием любого типа энергозависимого или энергонезависимого запоминающего устройства либо комбинации вышеозначенного, например, как статическое оперативное запоминающее устройство (SRAM), электрически стираемое программируемое постоянное запоминающее устройство (EEPROM), стираемое программируемое постоянное запоминающее устройство (EPROM), программируемое постоянное запоминающее устройство (PROM), постоянное запоминающее устройство (ROM), магнитное запоминающее устройство, флэш-память, магнитный или оптический диск.
[00257] Компонент 506 питания предоставляет питание в различные компоненты устройства 500. Компонент 506 питания может включать в себя систему управления питанием, один или более источников питания и другие компоненты, ассоциированные с формированием, управлением и распределением питания устройства 500.
[00258] Мультимедийный компонент 508 включает в себя экран, предоставляющий интерфейс вывода между устройством 500 и пользователем. В некоторых вариантах осуществления экран может включать в себя жидкокристаллический дисплей (ЖК-дисплей) и сенсорную панель (TP). Если экран включает в себя сенсорную панель, экран может быть реализован в качестве сенсорного экрана для того, чтобы принимать входные сигналы от пользователя. Сенсорная панель включает в себя один или более датчиков касания для того, чтобы считывать касания, проведения по экрану и жесты на сенсорной панели. Датчики касания могут не только считывать границу касания или действие проведения по экрану, но также и считывать период времени и давление, ассоциированное с касанием или действием проведения по экрану. В некоторых вариантах осуществления мультимедийный компонент 508 включает в себя фронтальную камеру и/или тыловую камеру. Фронтальная камера и/или тыловая камера может принимать внешние мультимедийные данные в то время, когда устройство 500 находится в рабочем режиме, к примеру, в режиме фотосъемки или в видеорежиме. Каждая из фронтальной камеры и тыловой камеры может представлять собой систему с фиксированной оптической линзой либо иметь характеристики фокусировки и оптического масштабирования.
[00259] Аудиокомпонент 510 выполнен с возможностью выводить и/или вводить аудиосигналы. Например, аудиокомпонент 510 включает в себя микрофон (MIC), выполненный с возможностью принимать внешний аудиосигнал, когда устройство 500 находится в рабочем режиме, к примеру, в режиме вызова, в режиме записи и в режиме распознавания речи. Принимаемый аудиосигнал может быть дополнительно сохранен в запоминающем устройстве 504 или передан через компонент 516 связи. В некоторых вариантах осуществления аудиокомпонент 510 дополнительно включает в себя динамик для того, чтобы выводить аудиосигналы.
[00260] Интерфейс 512 ввода-вывода предоставляет интерфейс между компонентом 502 обработки и периферийными интерфейсными модулями, такими как клавиатура, колесико с кнопками, кнопка и т.п. Кнопка может включать в себя, но не только, кнопку перехода на домашнюю страницу, кнопку громкости, кнопку запуска и кнопку блокировки.
[00261] Сенсорный компонент 514 включает в себя один или более датчиков для того, чтобы предоставлять оценки состояния различных аспектов устройства 500. Например, сенсорный компонент 514 может обнаруживать открытое/закрытое состояние устройства 500, относительное позиционирование компонентов, например, дисплея и клавиатуры, устройства 500, изменение позиции устройства 500 или компонента устройства 500, присутствие или отсутствие контакта пользователя с устройством 500, ориентацию или ускорение/замедление устройства 500 и изменение температуры устройства 500. Сенсорный компонент 514 может включать в себя бесконтактный датчик, выполненный с возможностью обнаруживать присутствие находящихся рядом объектов без физического контакта. Сенсорный компонент 514 также может включать в себя светочувствительный датчик, такой как CMOS- или CCD-датчик изображений, для использования в приложениях формирования изображений. В некоторых вариантах осуществления сенсорный компонент 514 также может включать в себя датчик акселерометра, гиродатчик, магнитный датчик, датчик давления или температурный датчик.
[00262] Компонент 516 связи выполнен с возможностью упрощать связь, в проводном или в беспроводном режиме, между устройством 500 и другими устройствами. Устройство 500 может осуществлять доступ к беспроводной сети на основе стандарта связи, такого как Wi-Fi, 2G или 3G или комбинация вышеозначенного. В одном примерном варианте осуществления компонент 516 связи принимает широковещательный сигнал или ассоциированную с широковещательной передачей информацию из внешней системы управления широковещательной передачей через широковещательный канал. В одном примерном варианте осуществления компонент 516 связи дополнительно включает в себя модуль связи в поле в ближней зоне (NFC) для того, чтобы упрощать ближнюю связь. Например, NFC-модуль может реализовываться на основе технологии радиочастотной идентификации (RFID), технологии по стандарту Ассоциации по передаче данных в инфракрасном диапазоне (IrDA), технологии по стандарту сверхширокополосной связи (UWB), технологии Bluetooth (BT) и других технологий.
[00263] В примерных вариантах осуществления устройство 500 может реализовываться с помощью одной или более специализированных интегральных схем (ASIC), процессоров цифровых сигналов (DSP), устройств обработки цифровых сигналов (DSPD), программируемых логических устройств (PLD), программируемых пользователем вентильных матриц (FPGA), контроллеров, микроконтроллеров, микропроцессоров или других электронных компонентов, для осуществления вышеописанных способов.
[00264] В примерных вариантах осуществления также предусмотрен энергонезависимый машиночитаемый носитель хранения данных, включающий в себя инструкции, к примеру, включенные в запоминающее устройство 504, выполняемые посредством процессора 820 в устройстве 500, для осуществления вышеописанных способов. Например, энергонезависимый машиночитаемый носитель хранения данных может представлять собой ROM, оперативное запоминающее устройство (RAM), CD-ROM, магнитную ленту, гибкий диск и оптическое устройство хранения данных и т.п.
[00265] Энергонезависимый машиночитаемый носитель хранения данных, когда инструкции в носителе хранения данных выполняются посредством процессора терминального устройства, терминальное устройство может осуществлять способ для обнаружения прямой линии, способ включает в себя:
[00266] - получение набора признаков гистограммы градиентов каждой из соответствующих пиксельных точек в изображении, при этом набор признаков гистограммы градиентов выполнен с возможностью отражать характеристики прямой линии локальной области, в которой расположена пиксельная точка;
[00267] - определение по меньшей мере одного возможного варианта направления прямой линии, которая должна обнаруживаться, согласно наборам признаков гистограммы градиентов соответствующих пиксельных точек; и
[00268] - определение точного направления и точной позиции прямой линии, которая должна обнаруживаться, согласно по меньшей мере одному возможному варианту направления.
[00269] В заключение, в устройстве, предоставленном посредством настоящего варианта осуществления, посредством получения набора признаков гистограммы градиентов каждой из соответствующих пиксельных точек в изображении; определения по меньшей мере одного возможного варианта направления прямой линии, которая должна обнаруживаться, согласно наборам признаков гистограммы градиентов соответствующих пиксельных точек; и затем определения точного направления и точной позиции прямой линии, которая должна обнаруживаться, согласно по меньшей мере одному возможному варианту направления, при этом набор признаков гистограммы градиентов выполнен с возможностью отражать характеристики прямой линии локальной области, в которой расположена пиксельная точка, разрешается такая проблема в предшествующем уровне техники, что способ для обнаружения прямой линии может приводить к нарушению прямой линии и неточному результату обнаружения, когда контрастность края является слабой, или существуют шумовые помехи. Кроме того, способ для обнаружения прямой линии, предоставленный посредством настоящего варианта осуществления, не использует преобразование Хафа, не преобразует в двоичную форму изображение, за счет этого в достаточной степени исключая влияния ошибок, вызываемых посредством преобразования в двоичную форму, и повышая точность обнаружения прямой линии.
[00270] Помимо этого, электронное устройство согласно настоящему раскрытию сущности типично может представлять собой различные карманные терминальные устройства, такие как мобильный телефон, персональное цифровое устройство (PDA) и т.п. Следовательно, объем настоящего раскрытия сущности не ограничен конкретным типом электронного устройства.
[00271] Дополнительно, способ согласно настоящему раскрытию сущности может быть реализован как компьютерная программа, выполняемая посредством CPU, и компьютерная программа может сохраняться на машиночитаемом носителе хранения данных. Когда компьютерная программа выполняется посредством CPU, выполняются вышеуказанные функции, заданные в способах настоящего раскрытия сущности.
[00272] Помимо этого, вышеуказанные этапы способов и блоки системы также могут реализовываться посредством контроллера и машиночитаемого устройства хранения данных, которое сохраняет компьютерные программы, которые инструктируют контроллеру реализовывать вышеуказанные этапы и функции блоков.
[00273] Помимо этого, следует принимать во внимание, что вышеуказанное машиночитаемое устройство хранения данных (например, устройство хранения данных) может представлять собой энергозависимое запоминающее устройство или энергонезависимое запоминающее устройство либо может включать в себя оба из них. Например, но без ограничения, энергонезависимое запоминающее устройство может включать в себя постоянное запоминающее устройство (ROM), программируемое ROM (PROM), электрически программируемое постоянное запоминающее устройство (EPROM), электрически стираемое программируемое ROM (EEPROM) или флэш-память. Энергозависимое запоминающее устройство может включать в себя оперативное запоминающее устройство (RAM), которое может служить в качестве внешней кэш-памяти. В качестве примера, но без ограничения, RAM принимать различные формы, такие как синхронное RAM (SRAM), динамическое RAM (DRAM), синхронное DRAM (SDRAM), SDRAM с удвоенной скоростью передачи данных (DDR SDRAM), усовершенствованное SDRAM (ESDRAM), DRAM по технологии Synchlink (SLDRAM) и RAM по технологии Direct Rambus (DRRAM). Устройство хранения данных согласно раскрытым аспектам имеет намерение включать в себя, но не только, эти и другие подходящие типы запоминающих устройств.
[00274] Специалисты в данной области техники должны принимать во внимание, что различные примерные логические блоки, модули, схемы и этапы алгоритма, описанные в связи с настоящим раскрытием сущности, могут реализовываться как электронные аппаратные средства, компьютерное программное обеспечение или комбинация означенного. Чтобы ясно иллюстрировать взаимозаменяемость между аппаратными средствами и программным обеспечением, приведено общее описание различных иллюстративных компонентов, блоков, модулей, схем и функций этапов. Т.о., реализованы такие функции, как программное обеспечение или аппаратные средства, зависят от конкретного варианта применения и проектного ограничения всей системы. Эти функции могут быть реализованы в различных средствах для каждого конкретного варианта применения специалистами в данной области техники без отступления от объема настоящего раскрытия сущности.
[00275] Различные иллюстративные логические блоки, модули и схемы, описанные в сочетании с настоящим раскрытием сущности, могут реализовываться или выполняться посредством следующих компонентов, которые спроектированы с возможностью осуществлять вышеуказанные функции: процессор общего назначения, процессор цифровых сигналов (DSP), специализированная интегральная схема (ASIC), программируемая пользователем вентильная матрица (FPGA) или другие программируемые логические устройства, дискретные логические элементы или транзисторная логика, дискретные аппаратные компоненты либо любая комбинация этих компонентов. Процессор общего назначения может представлять собой микропроцессор. Альтернативно, процессор может представлять собой любое из традиционного процессора, контроллера, микроконтроллера или конечного автомата. Процессор может быть реализован как комбинация вычислительных устройств, к примеру, комбинация DSP и микропроцессора, множество микропроцессоров, один или более микропроцессоров вместе с DSP-ядром либо любая другая подобная конфигурация.
[00276] Способ и этапы алгоритма, описанного в сочетании с настоящим раскрытием сущности, могут непосредственно содержаться в аппаратных средствах, в программном модуле, выполняемом посредством процессора, или в комбинации означенного. Программный модуль может постоянно размещаться в оперативном запоминающем устройстве, флэш-памяти, постоянном запоминающем устройстве, запоминающем устройстве типа EPROM, запоминающем устройстве типа EEPROM, регистрах, на жестком диске, съемном диске, CD-ROM или на любом другом носителе хранения данных, известном в данной области техники. Примерный носитель хранения данных соединяется с процессором, так что процессор может считывать информацию из носителя хранения данных или записывать информацию на него. В альтернативном варианте осуществления носители хранения данных могут быть интегрированы с процессором. Процессор и носитель хранения данных могут постоянно размещаться в ASIC, которая может постоянно размещаться в пользовательском терминале. В альтернативном варианте осуществления процессор и носитель хранения данных могут постоянно размещаться в пользовательском терминале как дискретные компоненты.
[00277] В одной или более примерных схем вышеприведенные функции могут быть реализованы в аппаратных средствах, программном обеспечении, микропрограммном обеспечении или любой комбинации вышеозначенного. При реализации в программном обеспечении вышеуказанные функции могут сохраняться на машиночитаемом носителе в качестве одной или более инструкций или кодов либо передаваться через машиночитаемый носитель. Машиночитаемый носитель включает в себя компьютерный носитель хранения данных и среду связи. Среды связи включают в себя любую среду, которая может использоваться для того, чтобы передавать компьютерные программы из одного местоположения в другое местоположение. Носитель хранения данных может представлять собой любой доступный носитель, который является доступным посредством универсального или специализированного компьютера. Например, но без ограничения, машиночитаемый носитель может включать в себя RAM, ROM, EEPROM, CD-ROM или другие CD-устройства хранения данных, дисковое устройство хранения данных или другие магнитные устройства хранения данных либо любой другой носитель, который может использоваться для того, чтобы переносить или сохранять требуемые программные коды в форме инструкций или структуры данных и может быть доступным посредством универсального или специализированного компьютера либо универсального или специализированного процессора. Помимо этого, любое соединение может надлежащим образом называться "машиночитаемым носителем". Например, если коаксиальный кабель, волоконно-оптический кабель, "витая пара", цифровая абонентская линия (DSL) или беспроводные технологии, такие как инфракрасная, радиоволновая и микроволновая, используются для того, чтобы передавать программное обеспечение из веб-узла, сервера или другого удаленного источника, вышеуказанные коаксиальный кабель, волоконно-оптический кабель, "витая пара", DSL или беспроводные технологии, такие как инфракрасная, радиоволновая и микроволновая, содержатся в определении носителя. При использовании в данном документе, диск и оптический диск включают в себя компакт-диск (CD), лазерный диск, оптический диск, универсальный цифровой диск (DVD), гибкие диски, Blu-Ray-диск, из которых магнитный диск обычно представляет данные магнитно, а оптический диск представляет данные оптически посредством использования лазера. Комбинация вышеуказанного контента также должна быть включена в рамки машиночитаемого носителя.
[00278] Хотя в вышеуказанном контенте проиллюстрированы примерные варианты осуществления настоящего раскрытия сущности, следует отметить, что различные изменения и модификации могут вноситься без отступления от объема настоящего раскрытия сущности, который задается посредством формулы изобретения. Функции, этапы и/или операции формулы изобретения на способ согласно описанным вариантам осуществления настоящего раскрытия сущности необязательно могут выполняться в конкретном порядке. Помимо этого, хотя элементы настоящего раскрытия сущности могут описываться или задаваться в форме единственного числа, формы множественного числа также могут предполагаться, если только форма единственного числа явно не предписывается.
[00279] Определенные числа вышеописанных вариантов осуществления настоящего раскрытия сущности предназначены только для описания, но не представляют преимущества и недостатки вариантов осуществления.
[00280] Специалисты в данной области техники могут понимать, что все или часть этапов в вышеописанных вариантах осуществления могут осуществляться посредством аппаратных средств либо могут осуществляться посредством соответствующих аппаратных средств, которые получают инструкции посредством использования программ. Программа может сохраняться на машиночитаемом носителе хранения данных, и носитель хранения данных может представлять собой устройство хранения данных только для чтения, магнитный диск или оптический диск и т.д.
[00281] Вышеуказанный контент представляет собой только варианты осуществления настоящего раскрытия сущности, которые не используются для того, чтобы ограничивать настоящее раскрытие сущности. Все изменения, эквивалентные замены и модификации и т.д. в пределах сущности и принципа настоящего раскрытия сущности должны быть включены в объем охраны настоящего раскрытия сущности.

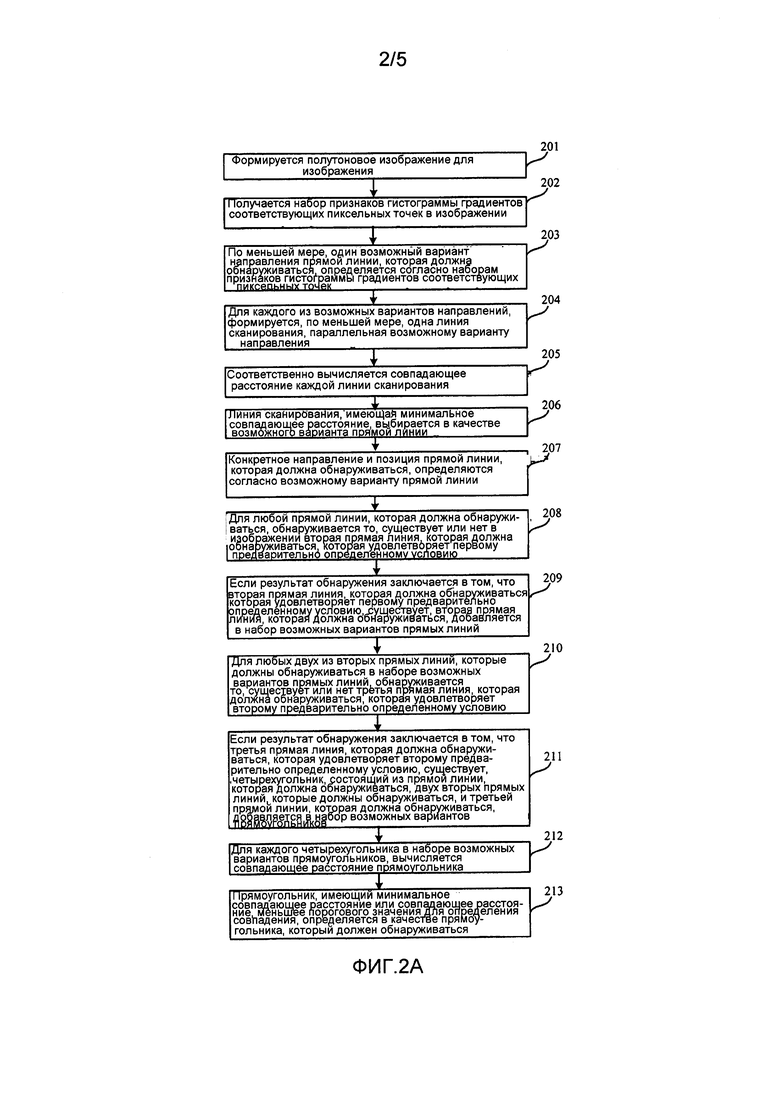
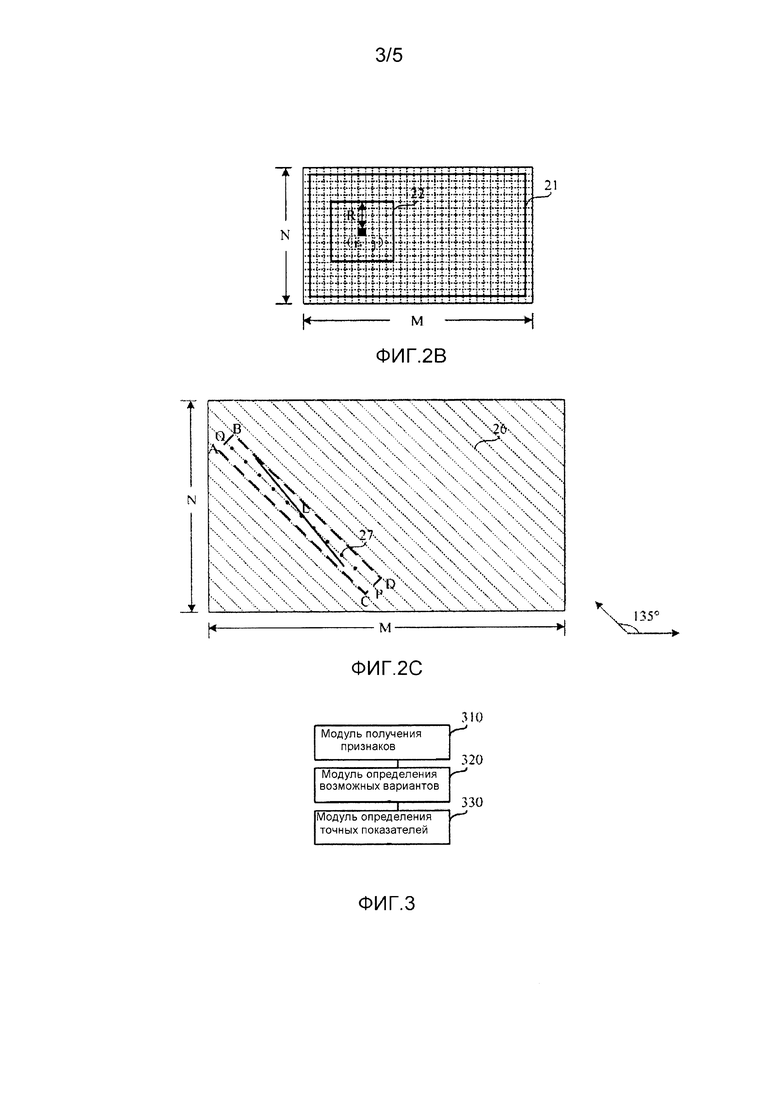

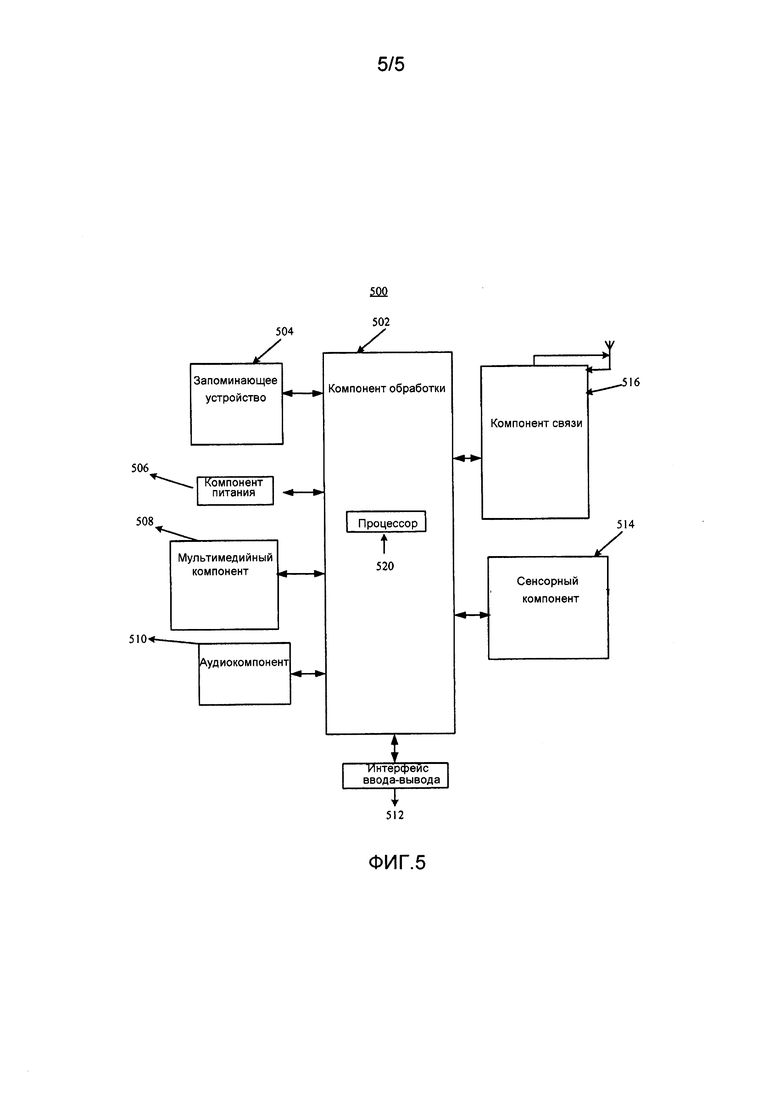
Изобретение относится к технологиям обнаружения прямых линий и геометрических форм с помощью электронных устройств. Техническим результатом является повышение точности обнаружения прямой линии за счет определения возможного варианта направления прямой линии, с учетом вычисления совпадающего расстояния, отражающего степень близости. Предложен способ для обнаружения прямой линии в изображении, применяемый в электронном устройстве. Способ содержит этап, на котором получают набор признаков гистограммы градиентов каждой из соответствующих пиксельных точек в изображении, при этом набор признаков гистограммы градиентов выполнен с возможностью отражать характеристики прямой линии локальной области, в которой расположена пиксельная точка. Далее, согласно способу, определяют по меньшей мере один возможный вариант направления прямой линии, которая должна обнаруживаться, согласно наборам признаков гистограммы градиентов соответствующих пиксельных точек. Для каждого из определенного по меньшей мере одного возможного варианта направлений формируют по меньшей мере одну линию сканирования, параллельную возможному варианту направления. 2 н. и 18 з.п. ф-лы, 7 ил.
1. Способ для обнаружения прямой линии в изображении, применяемый в электронном устройстве, отличающийся тем, что способ содержит этапы, на которых:
получают набор признаков гистограммы градиентов каждой из соответствующих пиксельных точек в изображении, при этом набор признаков гистограммы градиентов выполнен с возможностью отражать характеристики прямой линии локальной области, в которой расположена пиксельная точка;
определяют по меньшей мере один возможный вариант направления прямой линии, которая должна обнаруживаться, согласно наборам признаков гистограммы градиентов соответствующих пиксельных точек;
для каждого из определенного по меньшей мере одного возможного варианта направлений формируют по меньшей мере одну линию сканирования, параллельную возможному варианту направления;
соответственно вычисляют совпадающее расстояние каждой линии сканирования, при этом совпадающее расстояние линии сканирования выполнено с возможностью отражать степень близости линии сканирования к прямой линии, которая должна обнаруживаться;
выбирают линию сканирования, имеющую минимальное совпадающее расстояние, в качестве возможного варианта прямой линии; и
определяют точное направление и точную позицию прямой линии, которая должна обнаруживаться, согласно возможному варианту прямой линии.
2. Способ по п. 1, отличающийся тем, что получение набора признаков гистограммы градиентов соответствующих пиксельных точек в изображении содержит этапы, на которых:
для каждой пиксельной точки (i, j) из соответствующих пиксельных точек вычисляют набор g(i, j) градиентов направления пиксельной точки, при этом набор g(i, j) градиентов направления включает в себя значения градиентов направления пиксельной точки в K направлениях, и значение градиента направления пиксельной точки в любом направлении означает абсолютное значение разности между значением полутонов пиксельной точки и значением полутонов смежной пиксельной точки в этом направлении, K≥2; и
вычисляют набор h(i, j) признаков гистограммы градиентов пиксельной точки согласно набору g(i, j) градиентов направления пиксельной точки.
3. Способ по п. 2, отличающийся тем, что вычисление набора h(i, j) признаков гистограммы градиентов пиксельной точки согласно набору g(i, j) градиентов направления пиксельной точки содержит этапы, на которых:
соответственно вычисляют значения  локального градиента пиксельной точки в K направлениях, при этом значение
локального градиента пиксельной точки в K направлениях, при этом значение  локального градиента в k-направлении равно сумме значений градиентов направления всех пиксельных точек в локальной области, в которой расположена пиксельная точка, в k-направлении, и при этом k представляет направление;
локального градиента в k-направлении равно сумме значений градиентов направления всех пиксельных точек в локальной области, в которой расположена пиксельная точка, в k-направлении, и при этом k представляет направление;
вычисляют среднее значение hnorm(i, j) градиента пиксельной точки, при этом среднее значение hnorm(i, j) градиента равно извлечению корня суммы квадратов соответствующих значений  локального градиента пиксельной точки;
локального градиента пиксельной точки;
делят значение  локального градиента на среднее значение hnorm(i, j) градиента, чтобы получить признак hk(i, j) гистограммы градиентов пиксельной точки в k-направлении; и
локального градиента на среднее значение hnorm(i, j) градиента, чтобы получить признак hk(i, j) гистограммы градиентов пиксельной точки в k-направлении; и
определяют набор признаков гистограммы градиентов в K направлениях в качестве набора h(i, j) признаков гистограммы градиентов пиксельной точки.
4. Способ по п. 3, отличающийся тем, что способ дополнительно содержит этапы, на которых:
для каждой пиксельной точки (i, j) из соответствующих пиксельных точек обнаруживают то, меньше или нет среднее значение hnorm(i, j) градиента предварительно определенного среднего значения Tnorm; и
если результат обнаружения заключается в том, что среднее значение hnorm(i, j) градиента меньше предварительно определенного среднего значения Tnorm, задают соответствующие признаки гистограммы градиентов в наборе h(i, j) признаков гистограммы градиентов пиксельной точки равными нулю.
5. Способ по п. 2, отличающийся тем, что определение по меньшей мере одного возможного варианта направления прямой линии, которая должна обнаруживаться, согласно наборам признаков гистограммы градиентов соответствующих пиксельных точек содержит этапы, на которых:
для каждой из соответствующих пиксельных точек выбирают направление, соответствующее признаку гистограммы градиентов, имеющему максимальное значение в наборе признаков гистограммы градиентов, в качестве основного направления локальной области, в которой расположена пиксельная точка;
проводят статистические вычисления числа голосов основных направлений локальных областей, в которых расположены соответствующие пиксельные точки в K направлениях; и
выбирают направление, перпендикулярное направлению, имеющему число голосов, которое превышает пороговое значение числа голосов, в качестве возможного варианта направления прямой линии, которая должна обнаруживаться.
6. Способ по п. 3, отличающийся тем, что определение по меньшей мере одного возможного варианта направления прямой линии, которая должна обнаруживаться, согласно наборам признаков гистограммы градиентов соответствующих пиксельных точек содержит этапы, на которых:
для каждой из соответствующих пиксельных точек выбирают направление, соответствующее признаку гистограммы градиентов, имеющему максимальное значение в наборе признаков гистограммы градиентов, в качестве основного направления локальной области, в которой расположена пиксельная точка;
проводят статистические вычисления числа голосов основных направлений локальных областей, в которых расположены соответствующие пиксельные точки в K направлениях; и
выбирают направление, перпендикулярное направлению, имеющему число голосов, которое превышает пороговое значение числа голосов, в качестве возможного варианта направления прямой линии, которая должна обнаруживаться.
7. Способ по п. 4, отличающийся тем, что определение по меньшей мере одного возможного варианта направления прямой линии, которая должна обнаруживаться, согласно наборам признаков гистограммы градиентов соответствующих пиксельных точек содержит этапы, на которых:
для каждой из соответствующих пиксельных точек выбирают направление, соответствующее признаку гистограммы градиентов, имеющему максимальное значение в наборе признаков гистограммы градиентов, в качестве основного направления локальной области, в которой расположена пиксельная точка;
проводят статистические вычисления числа голосов основных направлений локальных областей, в которых расположены соответствующие пиксельные точки в K направлениях; и
выбирают направление, перпендикулярное направлению, имеющему число голосов, которое превышает пороговое значение числа голосов, в качестве возможного варианта направления прямой линии, которая должна обнаруживаться.
8. Способ по п. 1, отличающийся тем, что соответствующее вычисление совпадающего расстояния каждой линии сканирования содержит этапы, на которых:
для каждой из линий сканирования получают n точек выборки посредством дискретизации на линии сканирования, n≥1;
вычисляют совпадающее расстояние между набором признаков гистограммы градиентов для каждой из соответствующих точек выборки и набором признаков гистограммы градиентов шаблонов в направлении, перпендикулярном возможному варианту направления; и
суммируют совпадающие расстояние n точек выборки, чтобы получать совпадающее расстояние линии сканирования.
9. Способ по п. 1, отличающийся тем, что определение точного направления и позиции прямой линии, которая должна обнаруживаться, согласно возможному варианту прямой линии содержит этапы, на которых:
формируют прямоугольную область, имеющую предварительно определенный размер, посредством использования возможного варианта прямой линии в качестве центральной оси;
соответственно выбирают u точек и v точек на двух сторонах прямоугольной области, перпендикулярной возможному варианту прямой линии, и соединяют каждые две точки на двух сторонах, с тем чтобы получать u*v сегментов линии, u≥1, v≥1;
соответственно вычисляют совпадающее расстояние каждого сегмента линии из u*v сегментов линии, при этом совпадающее расстояние сегмента линии выполнено с возможностью отражать степень близости сегмента линии к прямой линии, которая должна обнаруживаться; и
выбирают прямую линию, которой принадлежит сегмент линии, имеющий минимальное совпадающее расстояние, в качестве прямой линии, которая должна обнаруживаться.
10. Способ по любому из пп. 1-9, отличающийся тем, что способ дополнительно содержит этапы, на которых:
для любой прямой линии, которая должна обнаруживаться, обнаруживают то, существует или нет в изображении вторая прямая линия, которая должна обнаруживаться, которая удовлетворяет первому предварительно определенному условию, при этом первое предварительно определенное условие включает в себя то, что вторая прямая линия, которая должна обнаруживаться, и прямая линия, которая должна обнаруживаться, имеют точку пересечения внутри изображения, и угол между ними меньше порогового значения угла;
если результат обнаружения заключается в том, что вторая прямая линия, которая должна обнаруживаться, которая удовлетворяет первому предварительно определенному условию, существует, добавляют вторую прямую линию, которая должна обнаруживаться, в набор возможных вариантов прямых линий;
для любых двух из вторых прямых линий, которые должны обнаруживаться в наборе возможных вариантов прямых линий, обнаруживают то, существует или нет третья прямая линия, которая должна обнаруживаться, которая удовлетворяет второму предварительно определенному условию, при этом второе предварительно определенное условие включает в себя то, что третья прямая линия, которая должна обнаруживаться, отличается от прямой линии, которая должна обнаруживаться, и третья прямая линия, которая должна обнаруживаться, пересекает обе из двух вторых прямых линий, которые должны обнаруживаться, с двумя точками пересечения внутри изображения;
если результат обнаружения заключается в том, что третья прямая линия, которая должна обнаруживаться, которая удовлетворяет второму предварительно определенному условию, существует, добавляют четырехугольник, состоящий из прямой линии, которая должна обнаруживаться, двух вторых прямых линий, которые должны обнаруживаться, и третьей прямой линии, которая должна обнаруживаться, в набор возможных вариантов прямоугольников;
для каждого четырехугольника в наборе возможных вариантов прямоугольников вычисляют совпадающее расстояние прямоугольника, при этом совпадающее расстояние четырехугольника выполнено с возможностью отражать степень близости четырехугольника к прямоугольнику, который должен обнаруживаться, и совпадающее расстояние четырехугольника равно сумме совпадающих расстояний сегментов линии, соответствующих четырем сторонам четырехугольника; и
определяют четырехугольник, имеющий минимальное совпадающее расстояние или совпадающее расстояние, меньшее порогового значения для определения совпадения, в качестве прямоугольника, который должен обнаруживаться.
11. Электронное устройство для обнаружения прямой линии в изображении, отличающееся тем, что электронное устройство содержит:
модуль получения признаков, выполненный с возможностью получать набор признаков гистограммы градиентов каждой из соответствующих пиксельных точек в изображении, при этом набор признаков гистограммы градиентов выполнен с возможностью отражать характеристики прямой линии локальной области, в которой расположена пиксельная точка;
модуль определения возможных вариантов, выполненный с возможностью определять по меньшей мере один возможный вариант направления прямой линии, которая должна обнаруживаться, согласно наборам признаков гистограммы градиентов соответствующих пиксельных точек; и
модуль определения точных показателей, выполненный с возможностью определять точное направление и точную позицию прямой линии, которая должна обнаруживаться, включающий в себя:
блок формирования сканирования, выполненный с возможностью, для каждого из возможных вариантов направлений, формировать по меньшей мере одну линию сканирования, параллельную возможному варианту направления,
блок вычисления совпадения сканирований, выполненный с возможностью соответственно вычислять совпадающее расстояние каждой линии сканирования, при этом совпадающее расстояние линии сканирования выполнено с возможностью отражать степень близости линии сканирования к прямой линии, которая должна обнаруживаться,
блок выбора сканирования, выполненный с возможностью выбирать линию сканирования, имеющую минимальное совпадающее расстояние, в качестве возможного варианта прямой линии, и
блок определения точных показателей, выполненный с возможностью определять точное направление и позицию прямой линии, которая должна обнаруживаться, согласно возможному варианту прямой линии.
12. Электронное устройство по п. 11, отличающееся тем, что модуль получения признаков включает в себя блок вычисления градиентов и блок вычисления признаков, при этом:
блок вычисления градиентов выполнен с возможностью, для каждой пиксельной точки (i, j) из соответствующих пиксельных точек, вычислять набор g(i, j) градиентов направления пиксельной точки, при этом набор g(i, j) градиентов направления включает в себя значения градиентов направления пиксельной точки в K направлениях, и значение градиента направления пиксельной точки в любом направлении означает абсолютное значение разности между значением полутонов пиксельной точки и значением полутонов смежной пиксельной точки в этом направлении, K≥2, и
блок вычисления признаков выполнен с возможностью вычислять набор h(i, j) признаков гистограммы градиентов пиксельной точки согласно набору g(i, j) градиентов направления пиксельной точки.
13. Электронное устройство по п. 12, отличающееся тем, что блок вычисления признаков включает в себя субблок локальных градиентов, субблок средних градиентов, субблок вычисления признаков и субблок определения признаков, при этом:
субблок локальных градиентов выполнен с возможностью соответственно вычислять значения  локального градиента пиксельной точки в K направлениях, при этом значение
локального градиента пиксельной точки в K направлениях, при этом значение  локального градиента в k-направлении равно сумме значений градиентов направления всех пиксельных точек в k-направлении в локальной области, в которой расположена пиксельная точка, и при этом k представляет направление,
локального градиента в k-направлении равно сумме значений градиентов направления всех пиксельных точек в k-направлении в локальной области, в которой расположена пиксельная точка, и при этом k представляет направление,
субблок средних градиентов выполнен с возможностью вычислять среднее значение hnorm(i, j) градиента пиксельной точки, при этом среднее значение hnorm(i, j) градиента равно извлечению корня суммы квадратов соответствующих значений  локального градиента пиксельной точки,
локального градиента пиксельной точки,
субблок вычисления признаков выполнен с возможностью делить значение  локального градиента на среднее значение hnorm(i, j) градиента, чтобы получать признак hk(i, j) гистограммы градиентов пиксельной точки в k-направлении, и
локального градиента на среднее значение hnorm(i, j) градиента, чтобы получать признак hk(i, j) гистограммы градиентов пиксельной точки в k-направлении, и
субблок определения признаков выполнен с возможностью определять набор признаков гистограммы градиентов в K направлениях в качестве набора h(i, j) признаков гистограммы градиентов пиксельной точки.
14. Электронное устройство по п. 13, отличающееся тем, что электронное устройство дополнительно включает в себя субблок обнаружения средних значений и субблок задания признаков равными нулю, при этом:
субблок обнаружения средних значений выполнен с возможностью, для каждой пиксельной точки (i, j) из соответствующих пиксельных точек, обнаруживать то, меньше или нет среднее значение hnorm(i, j) градиента предварительно определенного среднего значения Tnorm, и
субблок задания признаков равными нулю выполнен с возможностью задавать соответствующие признаки гистограммы градиентов в наборе h(i, j) признаков гистограммы градиентов пиксельной точки равными нулю, если результат обнаружения заключается в том, что среднее значение hnorm(i, j) градиента меньше предварительно определенного среднего значения Tnorm.
15. Электронное устройство по п. 12, отличающееся тем, что модуль определения возможных вариантов включает в себя блок выбора направлений, блок статистических вычислений числа голосов и блок выбора возможных вариантов, при этом:
блок выбора направлений выполнен с возможностью, для каждой из соответствующих пиксельных точек, выбирать направление, соответствующее признаку гистограммы градиентов, имеющему максимальное значение в наборе признаков гистограммы градиентов, в качестве основного направления локальной области, в которой расположена пиксельная точка,
блок статистических вычислений числа голосов выполнен с возможностью проводить статистические вычисления числа голосов основных направлений локальных областей, в которых расположены соответствующие пиксельные точки в K направлениях, и
блок выбора возможных вариантов выполнен с возможностью выбирать направление, перпендикулярное направлению, имеющему число голосов, которое превышает пороговое значение числа голосов, в качестве возможного варианта направления прямой линии, которая должна обнаруживаться.
16. Электронное устройство по п. 13, отличающееся тем, что модуль определения возможных вариантов включает в себя блок выбора направлений, блок статистических вычислений числа голосов и блок выбора возможных вариантов, при этом:
блок выбора направлений выполнен с возможностью, для каждой из соответствующих пиксельных точек, выбирать направление, соответствующее признаку гистограммы градиентов, имеющему максимальное значение в наборе признаков гистограммы градиентов, в качестве основного направления локальной области, в которой расположена пиксельная точка,
блок статистических вычислений числа голосов выполнен с возможностью проводить статистические вычисления числа голосов основных направлений локальных областей, в которых расположены соответствующие пиксельные точки в K направлениях, и
блок выбора возможных вариантов выполнен с возможностью выбирать направление, перпендикулярное направлению, имеющему число голосов, которое превышает пороговое значение числа голосов, в качестве возможного варианта направления прямой линии, которая должна обнаруживаться.
17. Электронное устройство по п. 14, отличающееся тем, что модуль определения возможных вариантов включает в себя блок выбора направлений, блок статистических вычислений числа голосов и блок выбора возможных вариантов, при этом:
блок выбора направлений выполнен с возможностью, для каждой из соответствующих пиксельных точек, выбирать направление, соответствующее признаку гистограммы градиентов, имеющему максимальное значение в наборе признаков гистограммы градиентов, в качестве основного направления локальной области, в которой расположена пиксельная точка,
блок статистических вычислений числа голосов выполнен с возможностью проводить статистические вычисления числа голосов основных направлений локальных областей, в которых расположены соответствующие пиксельные точки в K направлениях, и
блок выбора возможных вариантов выполнен с возможностью выбирать направление, перпендикулярное направлению, имеющему число голосов, которое превышает пороговое значение числа голосов, в качестве возможного варианта направления прямой линии, которая должна обнаруживаться.
18. Электронное устройство по п. 11, отличающееся тем, что блок вычисления совпадения сканирований включает в себя субблок получения выборок, субблок вычисления совпадения выборок и субблок суммирования выборок, при этом:
субблок получения выборок выполнен с возможностью, для каждой из линий сканирования, получения n точек выборки посредством дискретизации на линии сканирования, n≥1,
субблок вычисления совпадения выборок выполнен с возможностью вычислять совпадающее расстояние между набором признаков гистограммы градиентов для каждой из соответствующих точек выборки и набором признаков гистограммы градиентов шаблонов в направлении, перпендикулярном возможному варианту направления, и
субблок суммирования выборок выполнен с возможностью суммировать совпадающие расстояния n точек выборки, чтобы получать совпадающее расстояние линии сканирования.
19. Электронное устройство по п. 11, отличающееся тем, что блок определения точных показателей включает в себя субблок формирования прямоугольников, субблок формирования сегментов линии, субблок вычисления совпадения сегментов линии и субблок выбора сегментов линии, при этом:
субблок формирования прямоугольников выполнен с возможностью формировать прямоугольную область, имеющую предварительно определенный размер, посредством использования возможного варианта прямой линии в качестве центральной оси,
субблок формирования сегментов линии выполнен с возможностью соответственно выбирать u точек и v точек на двух сторонах прямоугольной области, перпендикулярной возможному варианту прямой линии, и соединять каждые две точки на двух сторонах, с тем чтобы получать u*v сегментов линии, u≥1, v≥1,
субблок вычисления совпадения сегментов линии выполнен с возможностью соответственно вычислять совпадающее расстояние каждого сегмента линии из u*v сегментов линии, при этом совпадающее расстояние сегмента линии выполнено с возможностью отражать степень близости сегмента линии к прямой линии, которая должна обнаруживаться, и
субблок выбора сегментов линии выполнен с возможностью выбирать прямую линию, которой принадлежит сегмент линии, имеющий минимальное совпадающее расстояние, в качестве прямой линии, которая должна обнаруживаться.
20. Электронное устройство по любому из пп. 11-19, отличающееся тем, что устройство дополнительно содержит:
первый модуль обнаружения, выполненный с возможностью, для любой прямой линии, которая должна обнаруживаться, обнаруживать то, существует или нет в изображении вторая прямая линия, которая должна обнаруживаться, которая удовлетворяет первому предварительно определенному условию, при этом первое предварительно определенное условие включает в себя то, что вторая прямая линия, которая должна обнаруживаться, и прямая линия, которая должна обнаруживаться, имеют точку пересечения внутри изображения, и угол между ними меньше порогового значения угла;
модуль возможных вариантов прямых линий, выполненный с возможностью добавлять вторую прямую линию, которая должна обнаруживаться, в набор возможных вариантов прямых линий, если результат обнаружения заключается в том, что вторая прямая линия, которая должна обнаруживаться, которая удовлетворяет первому предварительно определенному условию, существует; и
второй модуль обнаружения, выполненный с возможностью, для любых двух из вторых прямых линий, которые должны обнаруживаться в наборе возможных вариантов прямых линий, обнаруживать то, существует или нет третья прямая линия, которая должна обнаруживаться, которая удовлетворяет второму предварительно определенному условию, при этом второе предварительно определенное условие включает в себя то, что третья прямая линия, которая должна обнаруживаться, отличается от прямой линии, которая должна обнаруживаться, и третья прямая линия, которая должна обнаруживаться, пересекает обе из двух вторых прямых линий, которые должны обнаруживаться, с двумя точками пересечения внутри изображения;
модуль возможных вариантов прямоугольников, выполненный с возможностью добавлять четырехугольник, состоящий из прямой линии, которая должна обнаруживаться, двух вторых прямых линий, которые должны обнаруживаться, и третьей прямой линии, которая должна обнаруживаться, в набор возможных вариантов прямоугольников, если результат обнаружения заключается в том, что третья прямая линия, которая должна обнаруживаться, которая удовлетворяет второму предварительно определенному условию, существует;
модуль вычисления совпадения, выполненный с возможностью, для каждого четырехугольника в наборе возможных вариантов прямоугольников, вычислять совпадающее расстояние прямоугольника, при этом совпадающее расстояние четырехугольника выполнено с возможностью отражать степень близости четырехугольника к прямоугольнику, который должен обнаруживаться, и совпадающее расстояние четырехугольника равно сумме совпадающих расстояний сегментов линии, соответствующих четырем сторонам четырехугольника; и
модуль определения прямоугольников, выполненный с возможностью определять четырехугольник, имеющий минимальное совпадающее расстояние или совпадающее расстояние, меньшее порогового значения для определения совпадения, в качестве прямоугольника, который должен обнаруживаться.
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| УСТРОЙСТВО ОБРАБОТКИ ВИДЕОИНФОРМАЦИИ СИСТЕМЫ ОХРАННОЙ СИГНАЛИЗАЦИИ | 2009 |
|
RU2484531C2 |

