Настоящее изобретение относится к области активных антенн с регулировкой фазы. Более конкретно, оно относится к способу калибровки фазового центра активной антенны с регулировкой фазы. Изобретение находит, например, свое полезное применение в активных наземных приемных антеннах для спутниковой связи.
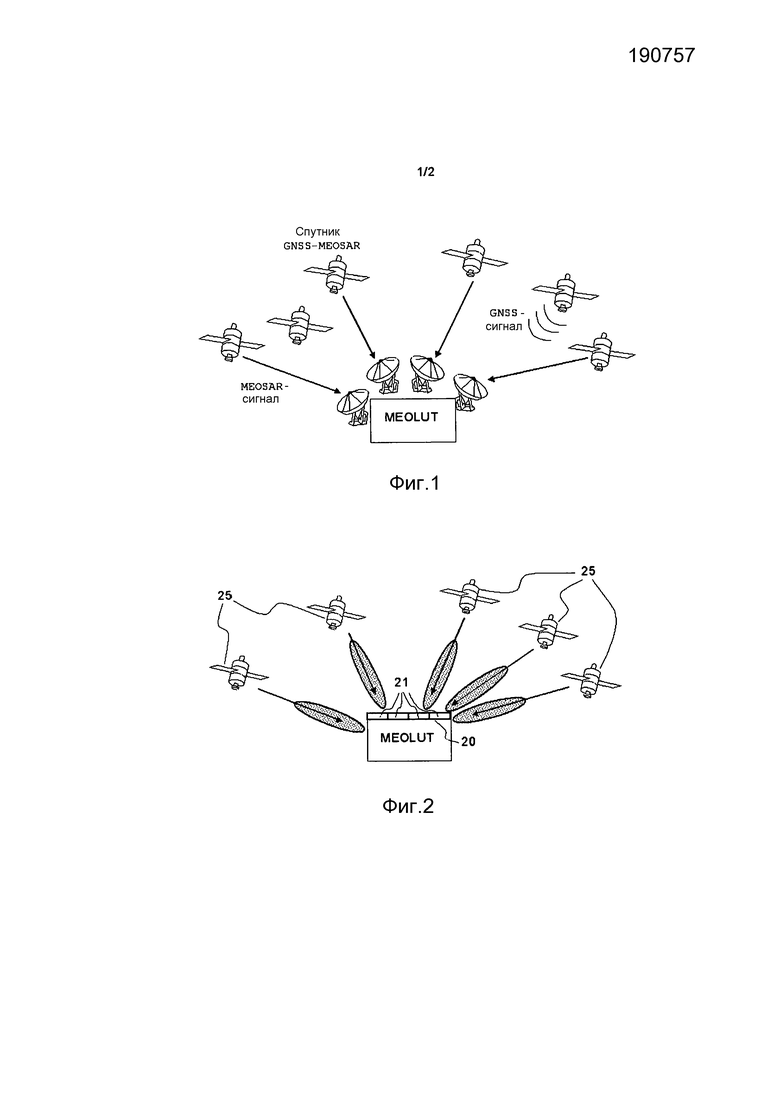
В настоящее время наземные приемные станции, как правило, используют множество мобильных параболических антенн, чтобы отслеживать спутники. Пример такой приемной станции представлен на фиг.1.
Проблема с антеннами этого типа заключается в том, что они сложны для реализации. Они также страдают от трудностей, связанных со скоростью изменения направления, что может приводить к ухудшению рабочих характеристик. Более того, в приемных станциях число антенн очень ограничено вследствие их стоимости. Более того, увеличение коэффициента усиления антенны сопровождается увеличением габаритных размеров антенны и, следовательно, увеличением сложности и стоимости.
Известно использование активной антенны с регулировкой фазы, чтобы заменить одну или более мобильных антенн. Активная антенна с регулировкой фазы состоит из множества излучающих субэлементов, каждый из которых имеет фазосдвигающую схему. В такой антенне волна, испускаемая или принимаемая каждым из субэлементов, интерферирует с волной от других субэлементов, и луч создается посредством суммирования этих конструктивных интерференций. Более того, изменяя фазы и амплитуды между каждым из субэлементов, луч может быть направлен в конкретном направлении.
Одной из трудностей связанных с использованием активной антенны, например, для отслеживания и связи со спутниками является управление коэффициентом усиления ее субэлементов и, в частности, полосой частот, в которой они используются.
Если, например, в конкретном направлении создается сдвиг фазы или искажается коэффициент усиления, фазовая функция, которая будет оптимальной для наведения в этом конкретном направлении, не будет такой же, как если бы искажение отсутствовало. Следует отметить, что это искажение может изменяться по времени.
Известно, что создающие помехи элементы, которые могут вызывать изменения фаз, являются элементами порядка длины волны. Следовательно, при низкой полосе частот, например при длине волны порядка приблизительно двадцати сантиметров, множество элементов может создавать помехи работе антенны. Более того, антенна также склонна, например, к эффектам ионосферного мерцания.
Чтобы использовать активную антенну точным образом, следовательно, необходимо выполнять калибровку антенны, то есть предложить решения, чтобы закон изменения фаз и амплитуд между различными субэлементами являлся действительно оптимальным для формирования луча, чтобы гарантировать оптимальный коэффициент усиления антенны. Эта калибровка может быть полностью выполнена, например, при изготовлении, но точность формирования луча будет неоптимальной. Эта калибровка может также выполняться постоянно, но эта операция является довольно дорогостоящей.
Использование одной активной антенны для замены нескольких мобильных антенн, следовательно, как правило, испытывает трудности калибровки, которые приводят либо к заметному ухудшению коэффициента усиления, если калибровка выполнена плохо, либо к применению сложных и дорогостоящих систем калибровки, чтобы получать оптимальный коэффициент усиления. Использование активных антенн для отслеживания группировок спутников на длинах волн, больших, чем 30 см, следовательно, ограничено в настоящее время.
Целью изобретения, в частности, является смягчение вышеупомянутых недостатков посредством предложения способа калибровки, делающего возможным улучшение рабочих характеристик линии связи между по меньшей мере одним спутником и активной наземной приемной антенной с регулировкой фазы.
С этой целью предметом изобретения является способ калибровки фазового центра активной антенны, содержащей множество субэлементов, способных принимать полезный сигнал, испускаемый спутником, причем упомянутая калибровка определяется как функция характеристик приема опорного сигнала на уровне каждого субэлемента, причем упомянутый опорный сигнал испускается тем же спутником в полосе частот, по существу, равной полосе частот полезного сигнала, и его теоретические характеристики приема известны.
Согласно одному варианту осуществления способ содержит:
- этап получения значений опорного сигнала и значений полезного сигнала на уровне каждого из субэлементов приемной антенны,
- этап измерения возможного расхождения по фазе и коэффициенту усиления между значениями фактически принятого опорного сигнала и теоретическими значениями приема опорного сигнала,
- этап оценки оптимальной функции распределения, которая должна быть применена к значениям сигналов, чтобы принять во внимание возможные помехи,
- этап применения возможной новой вычисленной функции распределения к субэлементам антенны.
Согласно варианту осуществления способа этап измерения способа выполняется посредством схемы корреляции.
Согласно конкретной особенности этого варианта значения опорного сигнала модифицируются посредством варьирования этих значений по времени и/или по частоте, и/или по мощности, чтобы найти форму сигнала, которая имеет наилучшую корреляцию с фактически принятым опорным сигналом.
Преимущественно, различные этапы способа выполняются последовательным образом в реальном времени.
Согласно другому варианту способ содержит этап сохранения, в течение предварительно определенного интервала времени, значений опорного сигнала и значений полезного сигнала, измеренных на уровне каждого из субэлементов приемной антенны, чтобы выполнять различные этапы способа отсроченным образом.
Согласно изобретению способ калибровки может использоваться, чтобы калибровать фазовый центр активной антенны для приема MEOSAR-сигналов, причем опорный сигнал является GNSS-сигналом, а полезный сигнал является MEOSAR-сигналом.
Другие конкретные признаки и преимущества настоящего изобретения станут более понятны из последующего описания, в качестве неограничивающего иллюстративного примера, со ссылкой на приложенные чертежи, на которых:
Фиг.1 представляет примерный вариант осуществления наземной приемной станции, использующей мобильные антенны.
Фиг.2 представляет примерный вариант осуществления наземной приемной станции, использующей одну активную антенну.
Фиг.3 представляет примерный вариант осуществления способа калибровки в соответствии с изобретением.
Фиг.4 представляет примерный вариант осуществления приемной антенны в соответствии с изобретением.
Предметом настоящего изобретения является способ калибровки фазового центра активной наземной приемной антенны, содержащей множество излучающих субэлементов и способной осуществлять связь с по меньшей мере одним спутником.
Предполагается, что спутник или спутники, на которые наводится приемная антенна, испускают, в дополнение к полезному сигналу, сигнал, выступающий в качестве опорного, в полосе частот, по существу, равной полосе частот полезного сигнала, причем его характеристики приема известны. Принцип изобретения состоит в использовании этого опорного сигнала, чтобы выполнять автоматически и постоянным образом калибровку фазового центра активной наземной приемной антенны.
В качестве совершенно неограничивающего примера изобретение будет представлено посредством калибровки фазового центра активной приемной антенны с регулировкой фазы наземной станции приема системы MEOSAR (среднеорбитальная система поиска и спасения), для которой полезный сигнал нисходящей линии связи испускается спутниками определения местоположения (GPS, Galileo, ГЛОНАСС) и на частоте, очень близкой к сигналам определения местоположения.
Фиг.2 представляет наземный центр обработки (или MEOLUT для среднеорбитального локального пользовательского терминала) системы MEOSAR, в которой четыре мобильные приемные антенны на фиг.1 были заменены одной активной приемной антенной 20 с регулировкой фазы. Преимущественным образом эта одна антенна делает возможным, как описано ранее, наведение на несколько спутников 25 одновременно и, таким образом, уменьшение стоимости станций MEOLUT.
Система MEOSAR основывается на различных группировках спутников 25 позиционирования (или GNSS для глобальной навигационной спутниковой системы), таких как американская GPS (система глобального позиционирования), русская ГЛОНАСС и европейская система Galileo, для операций поиска и спасения (или SAR, для "поиска и спасения"). В дополнение к своей основной функции определения местоположения эти спутники 25 позиционирования также имеют функцию SAR и соответственно несут на борту ретранслятор, служащий для того, чтобы ретранслировать сигналы, испускаемые наземными аварийными радиомаяками. Частота нисходящей (или обратной) линии связи этого ретранслятора находится в полосе частот 1544~1545 МГц.
Одна из рабочих частот спутников позиционирования или GNSS равна 1576 МГц, следовательно, является частотой, которая очень близка к частоте нисходящей линии связи системы MEOSAR.
Идея изобретения основана на том факте, что характеристики приема GNSS-сигналов, испускаемых спутниками 25 позиционирования, известны.
Действительно, точная позиция GNSS-спутников, позиция приемной антенны и моменты времени, в которые сигналы испускаются спутниками 25, известны с точностью за счет точности принципов GNSS-определения местоположения. Следовательно, теоретические характеристики приема, на уровне антенн MEOLUT, также известны. Более того, MEOSAR и GNSS-сигналы испускаются, по существу, в одинаковых полосах частот и принимаются с одних и тех же направлений. Эти два сигнала, следовательно, будут подвергаться одинаковым помехам во время их распространения между спутником 25 позиционирования и приемной антенной 20. Таким образом, сравнивая характеристики GNSS-сигналов, фактически принятых каждым субэлементом 21 активной приемной антенны, с характеристиками теоретических сигналов, которые они, как предполагается, должны принимать, можно вычислить корректировки, которые должны быть выполнены, чтобы принять эти помехи во внимание. Следовательно, возможно определить оптимальную функцию для амплитуд и фаз, или функцию распределения, которая должна применяться к каждому выходному сигналу субантенн 21 массива, чтобы максимизировать качество приема MEOSAR-сигнала.
Со ссылкой на фиг.3 представляется вариант осуществления способа калибровки в соответствии с изобретением.
В первом варианте осуществления способа калибровка выполняется последовательным образом в реальном времени.
Согласно первому этапу 31 получения, значения опорного GNSS-сигнала и полезных сигналов, а именно MEOSAR-сигналов, измеряются на уровне каждого субэлемента 21 приемной антенны 20.
Значения GNSS-сигнала после этого сравниваются с теоретическими значениями приема этого сигнала. Теоретические значения приема GNSS-сигнала соответствуют значениям, которые получила бы приемная антенна, если бы помехи не искажали этот сигнал по усилению и/или по фазе. Эти помехи могут быть обусловлены элементами с длинами, по существу, равными длине волны сигнала, проблемами, связанными с многолучевым распространением, эффектами ионосферных мерцаний или любым другим создающим помехи элементом.
Известным образом, ожидаемый GNSS-сигнал оценивается согласно знанию позиции приемной антенны 20 и позиции GNSS-спутников 25 посредством традиционного вычисления GNSS-определения местоположения.
Если фактически принятый GNSS-сигнал и ожидаемый теоретический GNSS-сигнал идентичны, то никакая помеха не модифицировала сигнал во время его распространения, или никакая новая помеха не модифицировала распространение сигнала после применения предыдущей функции распределения. Антенна, следовательно, не требует новой калибровки.
Если два сигнала, теоретический и фактически принятый, различаются, должна быть выполнена новая калибровка, чтобы принять во внимание помехи. С этой целью на этапе 32 вычисляется ошибка между фактически принятым опорным GNSS-сигналом и теоретическим GNSS-сигналом для каждого из субэлементов активной приемной антенны.
Согласно конкретному варианту осуществления этот этап 32 измерения ошибки между сигналом, фактически принятым каждым субэлементом 21, и ожидаемым теоретическим сигналом выполняется посредством схемы корреляции.
В некоторых вариантах осуществления способа значение опорного GNSS-сигнала модифицируется посредством варьирования значения сигнала по времени и/или по частоте и/или по мощности, чтобы найти форму сигнала, которая имеет наилучшую корреляцию с фактически принятым GNSS-сигналом и, следовательно, форму сигнала, которая является наиболее близкой к фактически принятому сигналу.
После того как найден оптимальный сдвиг по времени, частоте и/или мощности, корректировка, которая должна быть выполнена по отношению к принятым значениям, будет известна. Оптимальная функция распределения, которая должна быть применена к значениям принятых сигналов на уровне каждого субэлемента, чтобы учитывать помехи, может, следовательно, быть оценена на этапе 33. Получается функция распределения, которая должна быть применена, чтобы максимизировать коэффициент усиления антенны в желаемом направлении. Та же оптимальная функция распределения затем применяется на этапе 34 к субэлементам 21 приемной антенны 20. Применение этой функции распределения эквивалентно применению усиленного луча в направлении, которое максимизирует способность приема сигнала. Это направление, как правило, близко к "геометрическому" направлению между приемной антенной 20 и спутником 25, на который она направлена, но может и отличаться в зависимости от окружающих элементов, таких как, например, соединения между субэлементами 21 антенны 20.
Можно проверить апостериорно, что выбранная функция фаз действительно соответствует той, которая максимизирует корреляцию с ожидаемым сигналом, применяя эту функцию распределения к субэлементам 21 приемной антенны 20, регистрируя GNSS-сигналы и сравнивая их с теоретическими сигналами. Опционально, в случае различий между двумя сигналами, функцию распределения можно отрегулировать посредством небольших вариаций фазы и амплитуды.
Следует отметить, что время вычисления функции распределения составляет порядка секунды, следовательно, является небольшим относительно времени вариации помех. Действительно, эти помехи, особенно атмосферного типа или вызванные проблемами многолучевого распространения излученной волны, имеют вариации порядка нескольких десятков секунд, следовательно, имеют гораздо более медленные вариации, чем секунда времени вычисления. Следовательно, функция распределения, примененная с задержкой около секунды, будет почти оптимальной; она не изменится в достаточной степени в этом масштабе времени, чтобы вызывать какую-либо проблему.
Согласно другому примерному варианту осуществления способа обработка данных не выполняется в реальном времени, а выполняется апостериорно. Например, значения GNSS и MEOSAR-сигналов, принятых на уровне каждого субэлемента 21 антенны 20, могут сохраняться в области памяти антенны и/или терминала для обработки данных в течение определенного периода накопления данных. Впоследствии значения GNSS-сигнала, принятые на уровне каждой субантенны и сохраненные, сравниваются с теоретическими значениями приема, чтобы определить различия между этими двумя значениями и вычислить функцию распределения, наилучшим образом представляющую искажения в коэффициенте усиления и фазе, испытываемые сигналом, испускаемым спутником во время периода накопления данных. Как описано ранее, этап измерения различий между фактически принятым сигналом и ожидаемым теоретическим сигналом, может быть выполнен посредством схемы корреляции. Вычисленная функция распределения после этого применяется к MEOSAR-сигналу, принятому на уровне каждого субэлемента 21 в течение этого же периода накопления данных.
Фиг.4 иллюстрирует совершенно неограничивающий примерный вариант осуществления приемной антенны 20, автоматически калибруемой согласно изобретению. В представленном примере приемная антенна 20 является плоской антенной (или "патч-антенной"), содержащей четыре субэлемента 21. Каждый субэлемент 21 или модуль приема излучения связан с коррелятором 41 , чтобы выполнять корреляцию с ожидаемым теоретическим опорным GNSS-сигналом. Сигналы, выходящие из корреляторов 41, затем анализируются модулем 42 сравнения. В этом модуле каждая задержка или опережение времени переводится в фазовый сдвиг в функции распределения. Аналогично, измеряется каждое различие амплитуды, чтобы определить компенсацию, которая должна быть применена. После этих вычислений в модуле 43 определения функции распределения вычисляется оптимальная функция распределения, обеспечивающая возможность наилучшего переноса этих различий. Эта функция распределения затем применяется к различным субэлементам 21 антенны 20 для приема полезных сигналов, а именно MEOSAR-сигналов в нашем примере.
Изобретение было описано посредством примерного использования способа калибровки согласно изобретению, однако изобретение никоим образом не ограничивается этим примером. В общем, данный способ может быть применен к калибровке фазового центра любой наземной приемной антенны, принимающей сигналы от спутника, испускающего, в дополнение к полезному сигналу, опорный сигнал в полосе частот, по существу, равной полосе частот полезного сигнала, который может служить для калибровки антенны.

Изобретение относится к области активных антенн с регулировкой фазы. Предложен способ калибровки фазового центра активной антенны (20), содержащей множество субэлементов (21), способных принимать полезный сигнал, испускаемый спутником (25). Причем упомянутая калибровка определяется в зависимости от коэффициента усиления при приеме и фазы при приеме опорного сигнала на уровне каждого субэлемента (21). Упомянутый опорный сигнал испускается тем же спутником (25) в полосе частот, по существу, равной полосе частот полезного сигнала, и его теоретические фаза и амплитуда при приеме известны. Технический результат заключается в упрощении калибровки. 2 н. и 5 з.п. ф-лы, 4 ил.
1. Способ калибровки фазового центра активной антенны (20), содержащей множество субэлементов (21), способных принимать полезный сигнал, испускаемый спутником (25), причем способ характеризуется тем, что упомянутая калибровка определяется в зависимости от коэффициента усиления при приеме и фазы при приеме опорного сигнала на уровне каждого субэлемента (21), причем упомянутый опорный сигнал испускается тем же спутником (25) в полосе частот, по существу, равной полосе частот полезного сигнала, и его теоретические фаза и амплитуда при приеме известны.
2. Способ по предшествующему пункту, характеризующийся тем, что содержит:
этап (31), на котором получают значения опорного сигнала и значения полезного сигнала на уровне каждого из субэлементов (21) приемной антенны (20),
этап (32), на котором измеряют возможное расхождение по фазе и коэффициенту усиления между значениями фактически принятого опорного сигнала и теоретическими значениями приема опорного сигнала,
этап (33), на котором оценивают оптимальную функцию распределения, которая должна быть применена к значениям сигналов, чтобы принять во внимание возможные помехи,
этап (34), на котором применяют возможную новую вычисленную функцию распределения к субэлементам (21) антенны (20).
3. Способ по предшествующему пункту, характеризующийся тем, что этап (32) измерения выполняется посредством схемы корреляции.
4. Способ по предшествующему пункту, характеризующийся тем, что значения опорного сигнала модифицируются посредством варьирования этих значений по времени, и/или по частоте, и/или по мощности, чтобы найти форму сигнала, которая имеет наилучшую корреляцию с фактически принятым опорным сигналом.
5. Способ по любому из пп. 2-4, характеризующийся тем, что различные этапы (31, 32, 33, 34) способа выполняются последовательным образом в реальном времени.
6. Способ по любому из пп. 2-4, характеризующийся тем, что содержит этап, на котором сохраняют в течение предварительно определенного интервала времени значения опорного сигнала и значения полезного сигнала, измеренные на уровне каждого из субэлементов (21) приемной антенны (20), чтобы выполнять этапы (32, 33, 34) способа отсроченным образом.
7. Применение способа по любому из предшествующих пунктов для калибровки фазового центра активной антенны (20) для приема MEOSAR-сигналов, при этом опорный сигнал является GNSS-сигналом, а полезный сигнал является MEOSAR-сигналом.
| СПОСОБ ПРОИЗВОДСТВА КОМПОТА ИЗ СЛИВ | 2010 |
|
RU2418536C1 |
| US 2011122016 A1, 26.05.2011 | |||
| US 2003038747 A1, 27.02.2003 | |||
| УСТРОЙСТВО И СПОСОБ КАЛИБРОВКИ АНТЕННОЙ РЕШЕТКИ | 2004 |
|
RU2364029C2 |
| КАЛИБРОВКА АНТЕННОЙ РЕШЕТКИ ДЛЯ СИСТЕМ БЕСПРОВОДНОЙ СВЯЗИ | 2006 |
|
RU2386223C2 |

