Изобретение относится к пьезоэлектрическим двигателям для использования в приборах и системах автоматики, приборостроения, робототехники, аэрокосмической, автомобильной отрасли.
Известны различные типы пьезоэлектрических двигателей для использования в системах автоматики и машиностроительных конструкциях. Например, пьезоэлектрический регулировочный элемент [Pat. US № 6765335 Piezoelectric adjusting element / Wischnewskiy Wladimir], содержащий корпус, в котором размещены ведомый элемент с фрикционным слоем, движущий элемент (рычаг), соединенный с пьезоэлементом. Или пьезоэлектрический двигатель [Zuowei Wang. Active shape adjustment of cable net structures with PZT actuators (Electronic resource)/ Zuowei Wang, Tuanjie Li, Yuyan Cao // Aerospace Science and Technology. – 2013. – pp. 160–168], состоящий из неподвижного корпуса, соединительного вала, пакета пьезоэлементов с рычагом, жесткозакрепленных в неподвижном корпусе. При подаче на пакет пьезоэлементов напряжения пакет пьезоэлементов удлиняется или укорачивается и создает механическое усилие на рычаг, связанный с элементом конструкции. Применяется для натяжения сети вант рефлектора.
Известно также устройство – пьезоэлектрический линейный двигатель [Pat. US № 8466601 Operating method and driving means of a piezolinear drive / Christopher Mock], имеющий группу исполнительных механизмов – пьезоактюаторов-стеков, контактирующих с ротором двигателя. Каждый пьезоактюатор-стек состоит из двух частей, первая часть – пьезоактюатор продольного типа, а вторая часть – пьезоактюатор сдвигового типа. Причем контакт (зажим и сдвиг) с ротором ведется через вторую часть стека и, по крайней мере, два идентичных стека находятся рядом друг с другом для выполнения альтернативного зажима и усовершенствования движения в пошаговом режиме.
Наиболее близким к заявляемому устройству является устройство регулировки с пьезоприводом [patent US № 5424597 Adjusting device with piezo drive / Rainer Gloss, Harry Marth], снабженное двумя пьезоэлементами с рычагами (ПР), которые взаимодействуют с ведомым элементом посредством пружинного элемента (прототип). Передача движения происходит по причине изменения длины пьезоэлементов при подаче на них напряжения. Из-за непрерывного смещения пружинного элемента гарантируется безопасное зацепление с ведомым элементом. Также устройство содержит источник питания пьезоэлементов, генерирующий одинаковые линейные кривые напряжения, которые расположены в шахматном порядке по времени, в результате чего пьезоэлементы с рычагами (ПР) контактируют с ведомым элементом, когда изменяется длина пьезоэлементов, и вызванные напряжения соответствуют требуемому направлению движения регулировки.
Основными недостатками прототипа являются низкий коэффициент полезного действия устройства, невысокая прочность в узлах крепления пьезоэлемента, также возможность заклинивания подвижных частей двигателя. Кроме того, увеличение мощности устройства возможно только за счет увеличения объёма и мощности пьезоэлемента.
Предложена конструкция линейного пьезоэлектрического двигателя, которая исключает перечисленные недостатки прототипа.
Задача решается тем, что двигатель, содержащий неподвижный корпус, ведомый элемент в подшипниковых опорах неподвижного корпуса, пьезоэлементы с рычагами (ПР) прямого и обратного хода ведомого элемента, источник питания пьезоэлементов, в отличие от прототипа, дополнительно оборудован подвижным корпусом. Подвижный корпус коаксиально размещен внутри неподвижного корпуса и соединен с ним упругими элементами, на подвижном корпусе жестко закреплены два ПР прямого хода ведомого элемента и два ПР обратного хода ведомого элемента, ПР одного и того же направления перемещения расположены оппозитно вокруг ведомого элемента, при этом источник питания пьезоэлементов имеет один выход для питания пьезоэлементов прямого хода и один выход для питания пьезоэлементов обратного хода, причем один из ПР для каждого из направлений перемещения ведомого элемента подключен к источнику питания через фазовращатель,
Каждый пьезоэлемент с рычагом выполнен в виде единого элемента, который жестко крепится на подвижном корпусе с возможностью фрикционного взаимодействия с ведомым элементом линейного пьезоэлектрического двигателя.
Сущность изобретения поясняется рисунками.
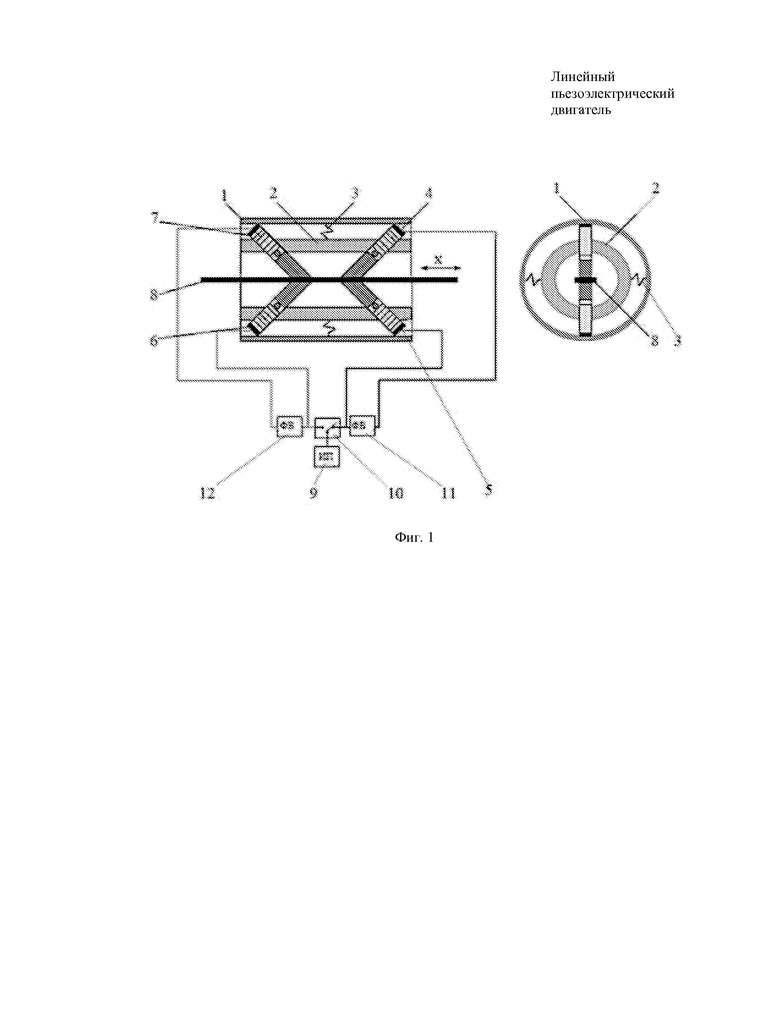
Фиг. 1 – Состав линейного пьезоэлектрического двигателя.
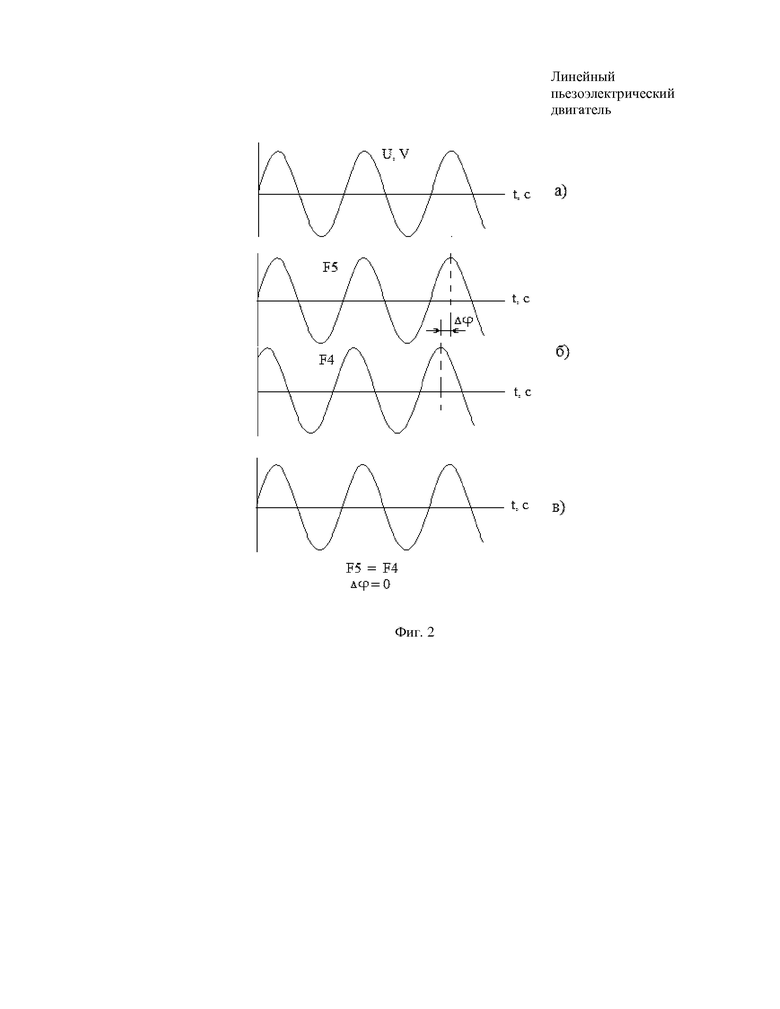
Фиг. 2 – Графики входного напряжения, подаваемого на пьезоэлементы.
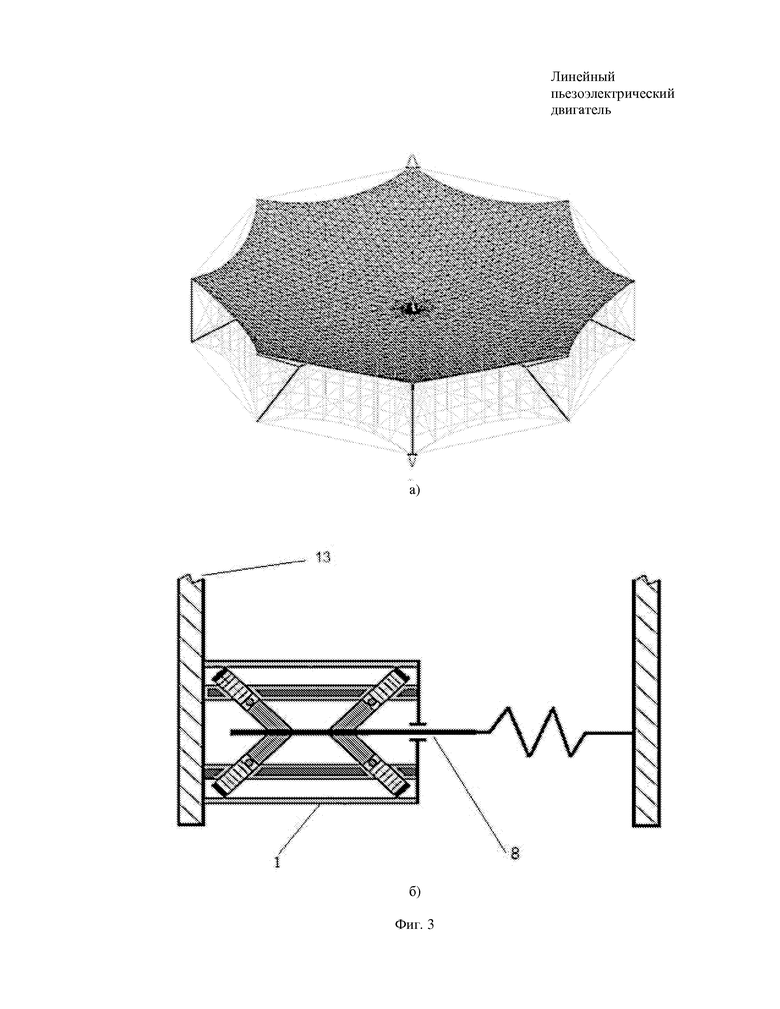
Фиг. 3 – Пример практической реализации линейного пьезоэлектрического двигателя.
Линейный пьезоэлектрический двигатель на фиг. 1 содержит два корпуса: внешний неподвижный корпус 1 и внутренний подвижный корпус 2, соединенные между собой упругими элементами 3, на внутреннем подвижном корпусе жестко закреплены ПР 4, 5, 6, 7, из которых два ПР (4 и 5) служат для прямого хода и два ПР (6 и 7) служат для обратного хода ведомого элемента 8. Сам же ведомый элемент 8 размещен в подшипниковых опорах неподвижного корпуса. Подвижный корпус 2 на упругих элементах 3 имеет резонансную частоту колебательной системы, более чем в √2 раз превышающую резонансную частоту колебательной системы подвижного корпуса с ведомым элементом, что позволяет выполнить частотную развязку и исключить заклинивание.
Для синфазной подстройки работы пьезоэлементов с рычагом высокочастотный источник питания 9 через коммутатор 10 подключается к ПР 5 напрямую, а к ПР 4 через фазовращатель 11, при переключении коммутатора для обратного хода источник питания аналогично подключается к ПР 6 напрямую, а к ПР 7 через фазовращатель обратного хода 12.
Для эффективной работы пьезодвигателя необходимо, чтобы усилия F пьезоэлементов (например, 4 и 5) не имели временного сдвига фаз, то есть работали совершенно синфазно (фиг. 2а). Невозможно произвести абсолютно одинаковые пьезоэлементы, поэтому даже при одинаковых сигналах возбуждения реакции ПР 4 и 5 не будут совпадать по фазе (фиг. 2б), что существенно снижает суммарный момент пьезодвигателя. Поэтому на ПР 4 сигнал возбуждения подается через фазовращатель прямого хода 11, на котором компенсируется разность фаз работы ПР 5 и 4 (фиг. 2в).
Линейный пьезоэлектрический двигатель работает следующим образом (фиг.1).
При подключении источника питания 9 через коммутатор 10 к одному ПР 5 напрямую и к другому ПР 4 через фазовращатель 11 (для синфазной подстройки вибросмещения), ПР 4 и 5 удлиняются и создают суммарный момент на ведомом элементе 8, подвижный корпус 2 с жестко закрепленными в нем ПР 4, 5, 6, 7 на упругих элементах 3 перемещается за счет фрикционного трения. При снятии питания с пьезоэлементов с рычагами 4 и 5 механический контакт ПР 4 и 5 с ведомым элементом 8 пропадает, и подвижный корпус 2 с жестко закрепленными в нем ПР 4, 5, 6, 7 за счет упругих элементов 3 возвращается в исходное положение относительно неподвижного корпуса линейного пьезоэлектрического двигателя. Повторением данного высокочастотного процесса реализуется прямой ход ведомого элемента 8.
Обратный ход пьезоэлектрического двигателя.
При подключении источника питания 9 через переключенный коммутатор 10 к одному ПР 6 напрямую и к другому ПР 7 через фазовращатель 12 (для синфазной подстройки вибросмещения), ПР 6 и 7 удлиняются и создают суммарный момент на ведомом элементе 8, подвижный корпус 2 с жестко закрепленными ПР 4, 5, 6, 7 перемещается на упругих элементах 3 за счет фрикционного трения. При снятии питания с ПР 6 и 7 механический контакт ПР 6 и 7 с ведомым элементом 8 пропадает, и подвижный корпус 2 с жестко закрепленными ПР 4, 5, 6, 7 за счет реакции упругих элементов 3 возвращается в исходное положение относительно неподвижного корпуса линейного пьезоэлектрического двигателя. Повторением данного высокочастотного процесса реализуется обратный ход ведомого элемента 8 пьезоэлектрического двигателя.
Линейный пьезоэлектрический двигатель заявленной конструкции (например, габариты 50x50x50 мм, масса 100 г, мощность 1 Вт, частота входного напряжения 1 кГц) можно использовать в качестве устройства для натяжения периферийных шнуров УНПШ силового каркаса антенного рефлектора (фиг.3а). Устройство крепится на спице рефлектора 13 (фиг. 3б), шнур рефлектора фиксируется на ведомом элементе 8 пьезоэлектрического двигателя. Таким образом, шнур силового каркаса можно натягивать или ослаблять для улучшения отражающей способности рефлектора.
Технический результат, достигаемый при осуществлении предлагаемого изобретения, состоит в повышении коэффициента полезного действия, увеличении удельной мощности пьезодвигателя за счет синфазности вибросмещения, уменьшении его габаритных размеров, обеспечении обратного хода, увеличении ресурса и надежности двигателя за счет фрикционного режима передачи момента на ведомый элемент и синфазной уравновешенности конструкции.
Из известных авторам источников информации и патентных материалов не известна совокупность признаков, сходных с совокупностью признаков заявленного устройства.
ЛИТЕРАТУРА
1. Pat. 6765335 United States, Piezoelectric adjusting element / Wischnewskiy Wladimir.
2. Zuowei Wang. Active shape adjustment of cable net structures with PZT actuators [Electronic resource]/ Zuowei Wang, Tuanjie Li, Yuyan Cao // Aerospace Science and Technology. – 2013. – pp. 160–168.
3. Pat. 8466601 United States, Operating method and driving means of a piezolinear drive / Christopher Mock.
4. Pat. 5424597 United States, Adjusting device with piezo drive / Rainer Gloss, Harry Marth.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вращательный пьезоэлектрический двигатель | 2015 |
|
RU2621712C2 |
| Линейный реверсивный вибродвигатель | 2018 |
|
RU2684395C1 |
| Линейный шаговый пьезоэлектрический двигатель | 2019 |
|
RU2727610C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ САМОЧУВСТВИТЕЛЬНЫМ ЛИНЕЙНЫМ ПЬЕЗОЭЛЕКТРИЧЕСКИМ АКТЮАТОРОМ | 2015 |
|
RU2608842C1 |
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ САМОЧУВСТВИТЕЛЬНЫМ УЛЬТРАЗВУКОВЫМ ПЬЕЗОЭЛЕКТРИЧЕСКИМ ДВИГАТЕЛЕМ | 2015 |
|
RU2631332C2 |
| ЛИНЕЙНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 2009 |
|
RU2390090C1 |
| УСТРОЙСТВО ПИТАНИЯ ШАГОВОГО ПЬЕЗОЭЛЕКТРИЧЕСКОГО ДВИГАТЕЛЯ (ВАРИАНТЫ) | 2018 |
|
RU2698578C1 |
| Пьезоэлектрический двигатель | 1991 |
|
SU1819372A3 |
| Прецизионный блокиратор комбинированного действия для пространственного блокирования вала | 2018 |
|
RU2674956C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВУХКООРДИНАТНЫЙ ОДНОЗЕРКАЛЬНЫЙ ОПТИЧЕСКИЙ ДЕФЛЕКТОР | 2015 |
|
RU2606520C1 |
Изобретение относится к электротехнике и может быть использовано в приборах и системах автоматики, приборостроения, робототехники, авиакосмической, автомобильной отрасли. Технический результат состоит в повышении КПД, в уменьшении его габаритных размеров, возможности обратного хода, в увеличении удельной мощности, ресурса и надежности конструкции за счет уравновешенности конструкции и фрикционного режима передачи момента на ведомый элемент. В двигателе, содержащем неподвижный корпус, ведомый элемент в подшипниковых опорах, пьезоэлементы с рычагами (ПР) прямого и обратного хода, источник питания пьезоэлементов дополнительно внутри неподвижного корпуса коаксиально размещен подвижный корпус, который соединен с неподвижным корпусом упругими элементами. На подвижном корпусе жестко закреплены два ПР прямого хода и два ПР обратного хода ведомого элемента. ПР одного и того же направления перемещения расположены оппозитно вокруг ведомого элемента. Источник питания пьезоэлементов имеет один выход для питания пьезоэлементов прямого хода и один выход для питания пьезоэлементов обратного хода. Один из двух ПР для каждого из направлений перемещения ведомого элемента подключен к источнику питания через фазовращатель. 3 ил. 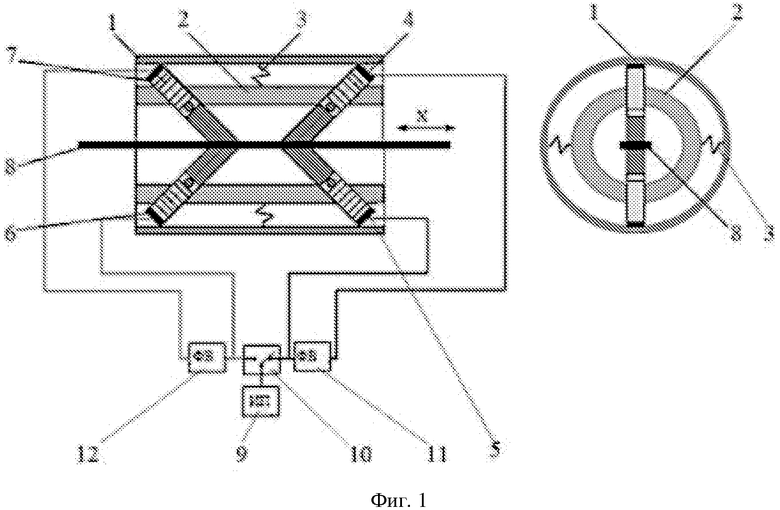
Линейный пьезоэлектрический двигатель, содержащий неподвижный корпус, ведомый элемент в подшипниковых опорах неподвижного корпуса, пьезоэлементы с рычагами прямого и обратного хода, источник питания пьезоэлементов, отличающийся тем, что дополнительно внутри неподвижного корпуса коаксиально размещен подвижный корпус, который соединен с неподвижным корпусом упругими элементами, на подвижном корпусе жестко закреплены два пьезоэлемента с рычагами прямого хода ведомого элемента и два пьезоэлемента с рычагами обратного хода ведомого элемента, пьезоэлементы с рычагами одного и того же направления перемещения расположены оппозитно вокруг ведомого элемента, при этом источник питания пьезоэлементов имеет один выход для питания пьезоэлементов прямого хода и один выход для питания пьезоэлементов обратного хода, причем один из пьезоэлементов с рычагами для каждого из направлений перемещения ведомого элемента подключен к источнику питания через фазовращатель.
| ЛИНЕЙНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 2009 |
|
RU2390090C1 |
| Рубанок | 1928 |
|
SU10733A1 |
| US 5424597 A, 13.06.1995 | |||
| US 2010264856 A1, 21.10.2010 | |||
| US 6765335 A, 20.07.2004. | |||

