Изобретение относится к области электротехники и автоматики и может быть использовано как исполнительный элемент для прецизионных перемещений в оптико-механических приборах, в технологическом оборудовании для микроэлектроники, в системах автоматического наведения, в механических сканирующих устройствах и пьезоприводах.
Известен линейный пьезодвигатель, содержащий неподвижный и подвижный корпуса, соединенные упругими элементами, шток, пьезоэлементы с рычагами прямого и обратного хода, которые жестко закреплены на подвижном корпусе. [Патент РФ №2617209 Линейный пьезоэлектрический двигатель / С.В.Пономарев, С.В. Рикконен, А.В. Азии, С.А. Орлов]. Недостаток конструкции заключается в том, что для организации реверсивной работы линейного пьезодвигателя используются по два, встречно расположенных пьезоэлемента, имеется подвижный корпус, дополнительные упругости - это увеличивает массогабаритные характеристики и усложняет управление устройством.
Известен линейный пьезоэлектрический двигатель [Патент РФ №2390090 Линейный пьезоэлектрический двигатель / А.Л. Гриценко, А.Я. Сафронов], который содержит ползун с направляющими и пьезоприводную систему, состоящую из замкнутой рамки с упругим элементом в виде двух плоских пружин на ее боковых гранях. В рамку вставлен пьезоэлемент продольного удлинения. На концах рамки в плоские пружины вставлены пьезоэлементы поперечных перемещений. Недостаток конструкции заключается в невысокой жесткости конструкции двигателя.
Наиболее близким (прототип) к заявляемому устройству является линейный пьезоэлектрический двигатель [Patent CN №104410323 Large linear displacement of the piezoelectric actuator and method of the clamp with power / UNIV XI AN JIAOTONG(CN)]. Двигатель содержит основание, эллиптический приводной механизм, направляющий и выходной стержень, левый и правый сжимающие механизмы, которые соответственно закреплены винтами на двух концах основания. Каждый сжимающий механизм состоит из пьезоэлектрического элемента, гибких шарниров и двух сжимающих элементов для фиксации стержня. Между левым и правым сжимающими механизмами расположен эллиптический приводной механизм с пьезоэлектрическим элементом. Направляющий стержень и выходной стержень соответственно соединены с левым концом и правым концом эллиптического приводного механизма и фиксируются в сжимающих механизмах.
Основной недостаток конструкции прототипа заключается в ограничении перемещений стержня за счет эллиптического приводного механизма, увеличение диапазона перемещения стержня возможно лишь за счет увеличения основания двигателя, что повлечет увеличение массогабаритных показателей. Кроме этого, надежность конструкции прототипа во многом зависит от надежности конструкционного узла направляющий стержень-эллиптический приводной механизм-выходной стержень, который должен держать всю нагрузку, оказываемую на двигатель при его работе.
Выше перечисленный недостаток исключает предложенная конструкция линейного шагового пьезоэлектрического двигателя.
Технический результат, достигаемый при осуществлении предлагаемого изобретения, состоит в увеличении жесткости конструкции и конструктивной независимости двигателя от величины стержня.
Технический результат достигается тем, что линейный шаговый пьезоэлектрический двигатель содержит основание, левый прижимающий механизм, приводной механизм и правый прижимающий механизм, включающие пьезоэлементы и гибкие шарниры, направляющий и выходной стержни, причем направляющий и выходной стержни выполнены в виде единого цилиндрического стержня, при этом приводной механизм представляет собой одноконтурный механический преобразователь, состоящий из рамки с гибкими шарнирами, внутри которой установлены два пьезоэлемента и проставка между ними, а прижимающие механизмы представляют собой двухконтурные механические преобразователи, состоящие из внешней и внутренней рамок, расположенных перпендикулярно друг к другу и содержащие гибкие шарниры, при этом внешняя рамка содержит два пьезоэлемента, каждый из которых с одной стороны имеют проставку, с другой стороны опорную площадку, которая крепиться к внешней рамке, а на внутренней рамке закреплены губки захвата стержня с возможностью их перемещения внутри проставки, причем прижимающие и приводной механизмы являются единым неразъемным элементом.
Сущность изобретения поясняется рисунками.
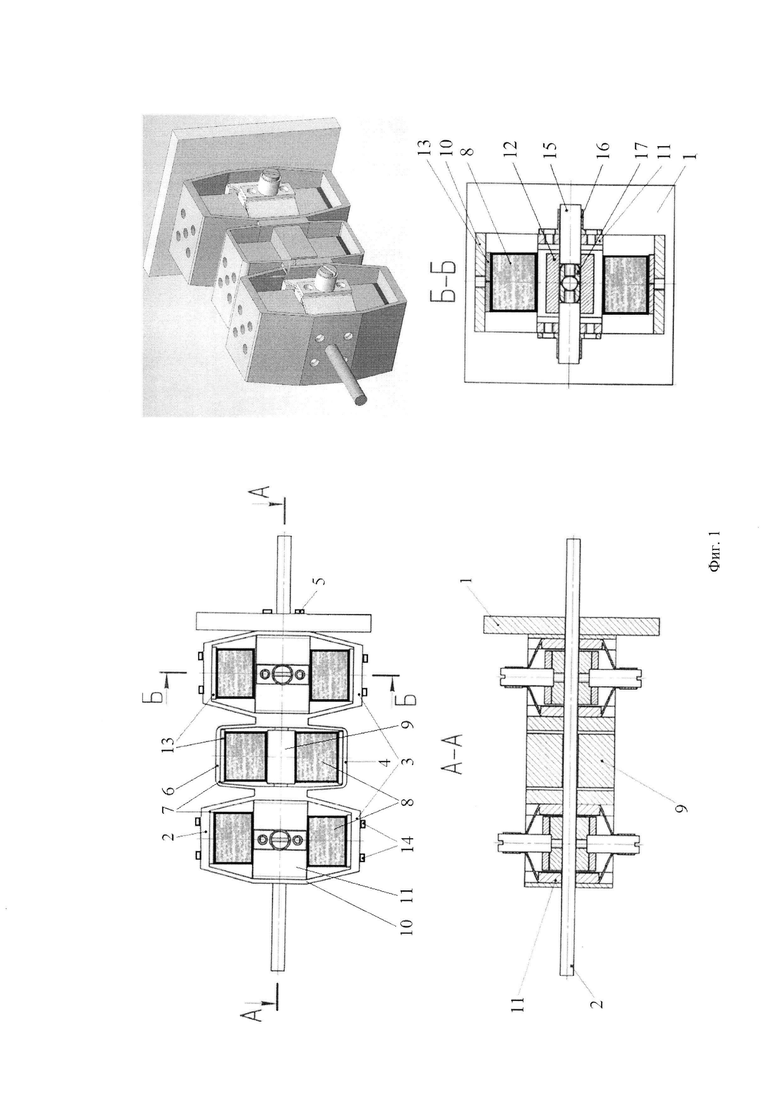
Фиг. 1 - Схема линейного шагового пьезоэлектрического двигателя.
Линейный шаговый пьезоэлектрический двигатель состоит из основания (1); стержня (2), двух прижимающих механизмов (3) и приводного механизма (4). Прижимающие (3) и приводной (4) механизмы являются единым неразъемным элементом. Основание (1) с помощью винтов (5) крепится сбоку к прижимающему механизму (3). Стержень (2) проходит сквозь прижимающие (3) и приводной (4) механизмы и основание (1) и фиксируется прижимающими механизмами (3). Приводной механизм (4) представляет собой одноконтурный механический преобразователь, состоящий из рамки (6) с гибкими шарнирами (7), внутри которой установлены два пьезоэлемента (8) и проставка (9) между ними. Прижимающие механизмы (3) выполнены в виде двухконтурных механических преобразователей, которые состоят из внешней (10) и внутренней (11) рамок, расположенных перпендикулярно друг к другу и содержащие гибкие шарниры (7), при этом внешняя рамка (10) содержит два пьезоэлемента (8), каждый из которых с одной стороны имеют проставку (12), с другой стороны опорную площадку (13), которая винтами (14) крепиться к внешней рамке (10), а на внутренней рамке (11) с помощью элементов крепления (15) и (16) закреплены губки захвата стержня (17) с возможностью их перемещения внутри проставки (12).
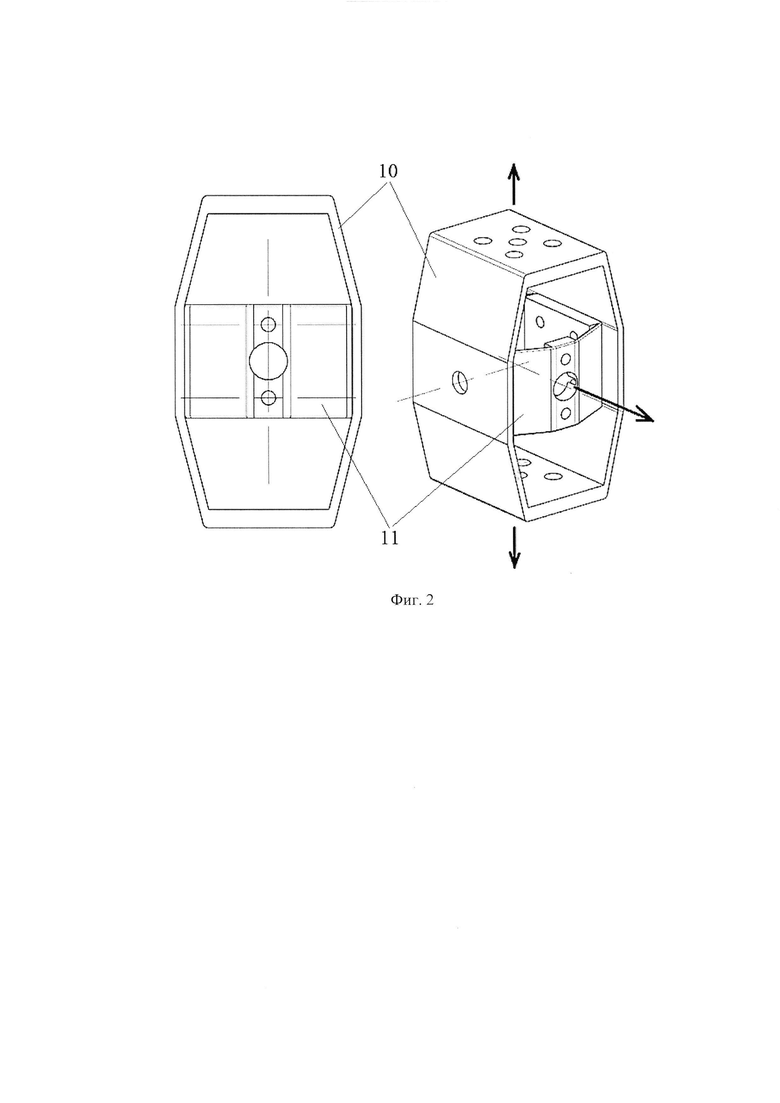
Фиг. 2 - Схема работы двухконтурного механического преобразователя.
При подаче напряжения на пьезоэлементы, пьезоэлементы увеличиваются в длину и, упираясь в проставку, давят на внешнюю рамку (10). Внешняя рамка увеличивается в длину и сужается в ширину, тем самым воздействуя на внутреннюю рамку (11). При этом внутренняя рамка (11) сужается в ширину и увеличивается в длину.
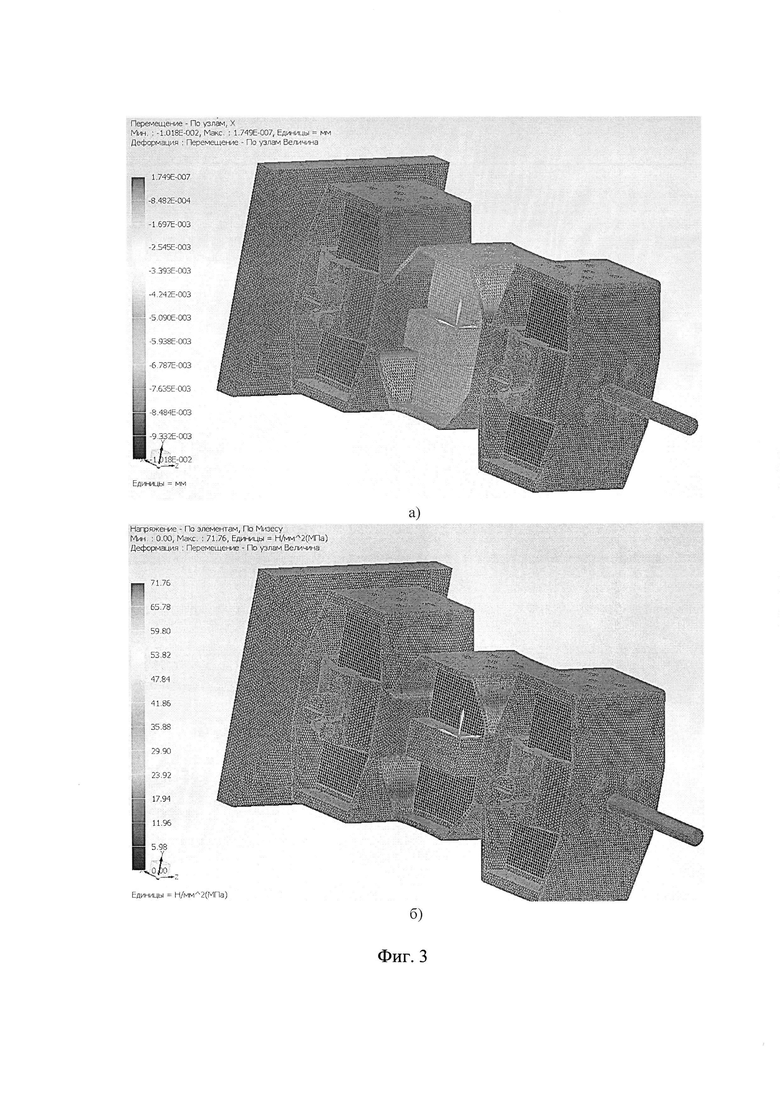
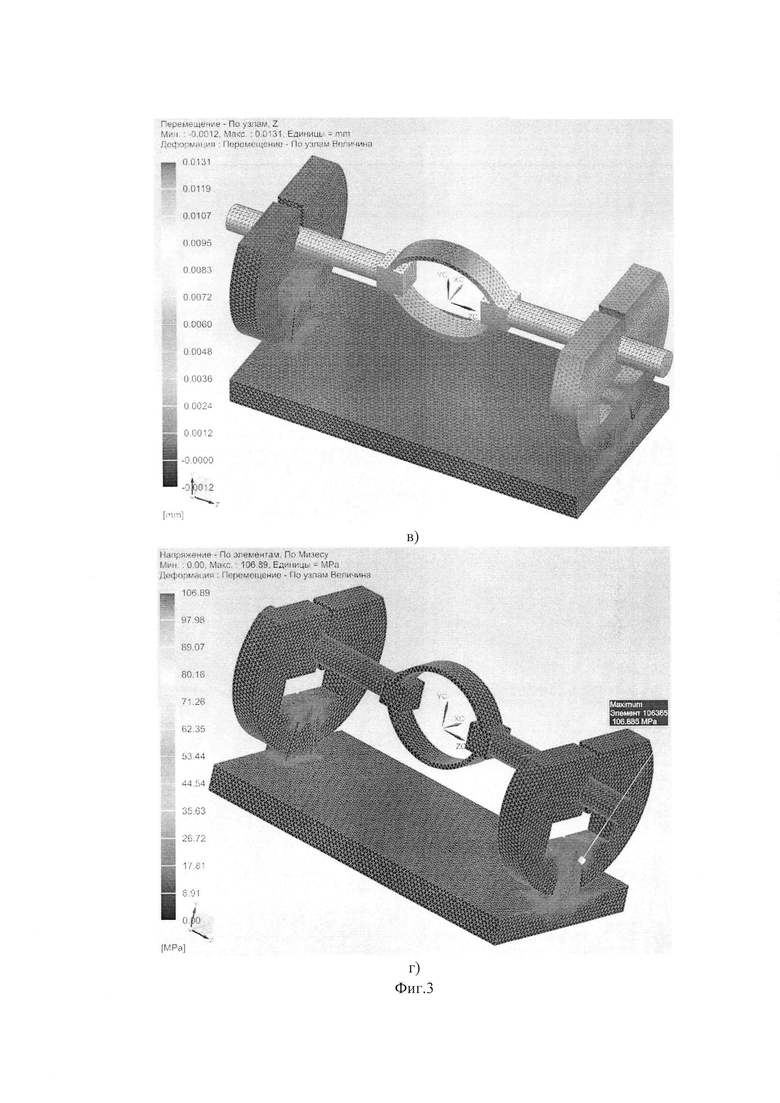
Фиг. 3 - Конечно-элементная модель линейного шагового пьезоэлектрического двигателя. Результаты испытания на жесткость.
Расчет жесткости конструкции линейного шагового пьезоэлектрического двигателя проводился с помощью пакета конечно-элементного анализа NX. В процессе численного моделирования решались задачи:
1. Определение жесткости конструкций предлагаемого привода и прототипа при оптимальном режиме работы
2. Определение тянущего усилия предлагаемого привода и прототипа
Были разработаны модели предлагаемого привода и прототипа. Конечно-элементная модель предлагаемого привода состоит из 1019346 элементов типа Tetra 4, Неха 8 и 1314883 узлов. Конечно-элементная модель прототипа состоит из 229115 элементов типа Tetra 4 и 52961 узлов. Материал конструкции приводов - сталь 10. Размеры и масса предлагаемого привода и прототипа: 20×20×50 мм при массе 30 г.
Конструкция прототипа при использовании указанного материала согласно КЭ расчету не может обеспечить тянущее усилие выше 11 Н. Конструкция предлагаемого привода при использовании указанного материала обеспечивает тянущее усилие 20 Н.
По результатам расчета определено, что максимальное удлинение конструкции линейного шагового пьезоэлектрического двигателя при тянущем усилии 20 Н составило 10,2 мкм (Фиг. 3а). При этом напряжение в элементах двигателя не превысило 72 МПа при 20 Н (Фиг. 3б). Следовательно, жесткость всей системы линейного шагового пьезоэлектрического двигателя составляет 2 Н/мкм.
Максимальное удлинение конструкции прототипа при тянущем усилии 11 Н составляет 13,1 мкм (Фиг. 3в). При этом напряжение в элементах прототипа не превышает 107 МПа (Фиг. 3 г). Следовательно, жесткость всей системы составляет 0,84 Н/мкм.
Построение КЭМ и процедуры вычислений относятся к «ноу-хау» изобретения и в данной заявке не рассматривается.
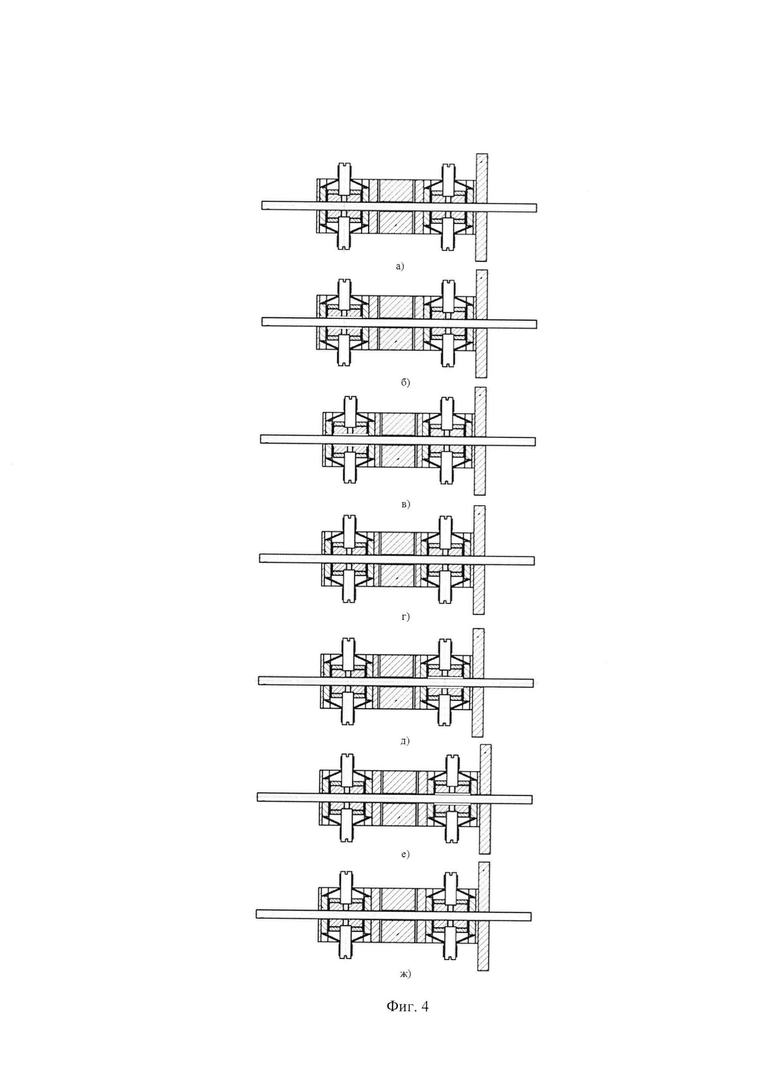
Фиг. 4 - Схема работы линейного шагового пьезоэлектрического двигателя.
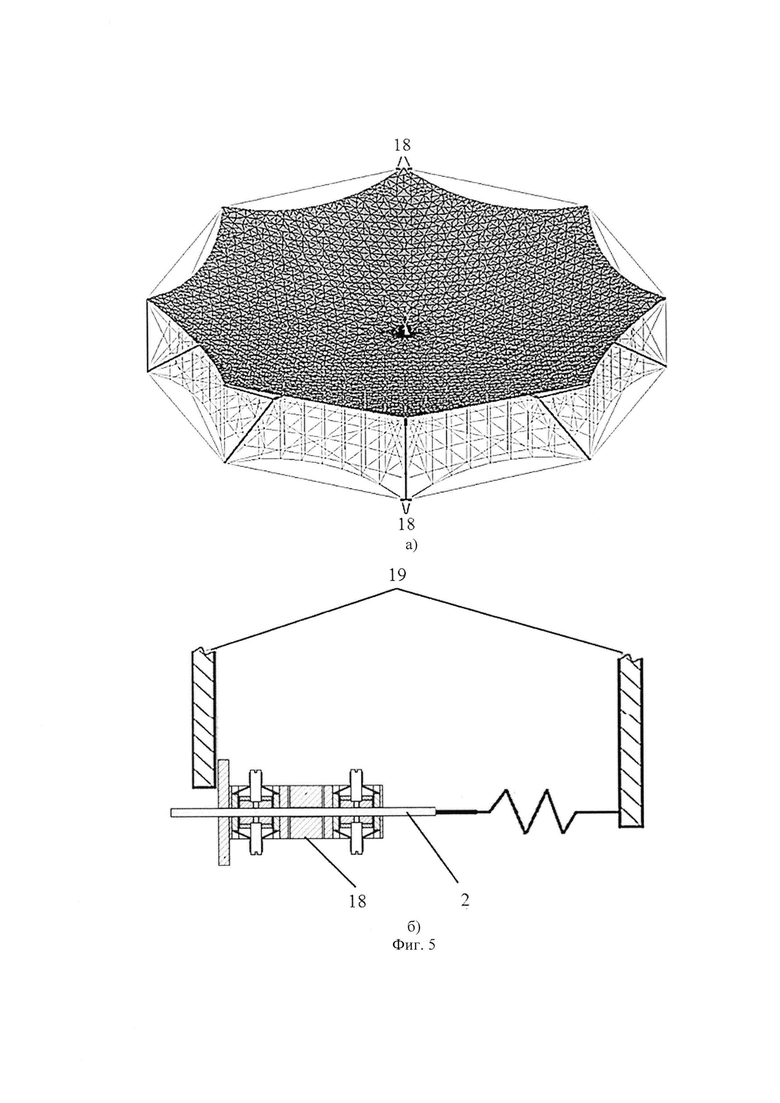
Фиг. 5 - Пример практической реализации линейного шагового пьезоэлектрического двигателя.
Линейный шаговый пьезоэлектрический двигатель (18) такой конструкции (габариты 20×20×50 мм, масса 30 гр) можно использовать в качестве устройства для натяжения шнуров рефлектора (УНПШ). Данное устройство крепится на спице рефлектора (19) (Фиг. 5а), шнур рефлектора фиксируется на стержне (2) двигателя (18). При необходимости шнур можно натягивать или ослаблять при формировании силового каркаса рефлектора для улучшении его отражающей способности. Причем данная конструкция линейного шагового пьезоэлектрического двигателя (18) позволяет использовать стержень (2) любой длины, что позволяет увеличивать диапазон регулировки шнура рефлектора. На (Фиг. 5б) приведена схема работы УНПШ.
Линейный шаговый пьезоэлектрический двигатель работает следующим образом.
В начальном положении прижимные механизмы (3) фиксируют стержень (2) за счет упругих сил двухконтурных механических преобразователей (Фиг. 4а). Подается управляющий сигнал на пьезоэлементы (8) левого прижимающего механизма, пьезоэлементы (8) увеличиваются, при этом внешняя рамка (10) сужается, сжимая внутреннюю рамку (11), причем губки захватов стержня (17) расходятся и стержень (2) освобождается, при этом правый прижимной механизм фиксирует стержень (2) (Фиг. 4б). Подается управляющий сигнал на пьезоэлементы (8) приводного механизма (4), пьезоэлементы (8) увеличиваются, при этом рамка (6) сужается и смещает разжатый левый прижимающий механизм к правому прижимающему механизму (Фиг. 4в). Снимается управляющий сигнал с левого прижимающего механизма и стержень (2) фиксируется (Фиг. 4 г). Подается управляющий сигнал на пьезоэлементы (8) правого прижимающего механизма, пьезоэлементы (8) увеличиваются, при этом внешняя рамка (10) сужается, сжимая внутреннюю рамку (11), причем губки захватов стержня (17) расходятся и стержень (2) освобождается, при этом левый прижимающий механизм фиксирует стержень (2) (Фиг. 4д). Снимается управляющий сигнал с пьезоэлементов (8) приводного механизма, пьезоэлементы (8) уменьшаются, при этом рамка (6) расширяется и смещает разжатый правый прижимающий механизм от левого прижимающего механизма (Фиг. 4е). Снимается управляющий сигнал с правого прижимающего механизма и стержень фиксируется (Фиг. 4ж). Шаг завершен, для дальнейшего перемещения стержня (2) необходимо повторить описанный порядок действий.
Направление и скорость движения линейного шагового пьезоэлектрического двигателя или его стержня определяется управляющими сигналами контроллера двигателя.
Из приведенного примера реализации следует, что достигается положительный эффект изобретения - увеличение жесткости конструкции и конструктивная независимость двигателя от величины стержня.
ЛИТЕРАТУРА
1. Пат. 2617209 Российская Федерация, Линейный пьезоэлектрический двигатель, МПК H02N 2/02 / Пономарев С.В., Рикконен С.В., Азии А.В., Орлов С.А.; заявитель и патентообладатель Федеральное государственное автономное образовательное учреждение высшего образования "Национальный исследовательский Томский государственный университет". - опубл. 24.04.2017.
2. Пат. 2390090 Российская Федерация, МПК H02N 2/02, H01L 41/09. Линейный пьезоэлектрический двигатель / Гриценко А.Л., Сафронов А.Я.; заявитель и патентообладатель ОАО "Научно исследовательский институт "Элпа" с опытным производством". - опубл. 20.05.2010.
3. Pat. 104410323 Chine, МПК H02N 2/02, H02N 2/04. Large linear displacement of the piezoelectric actuator and method of the clamp with power / Shao Shubao; Xu Minglong; Song Siyang; Chen Nan; Applicant Univ Xi an Jiaotong(CN). - bibliographic data 11.03.2015.
| название | год | авторы | номер документа |
|---|---|---|---|
| Линейный реверсивный вибродвигатель | 2018 |
|
RU2684395C1 |
| Гомогенизатор высокого давления | 2023 |
|
RU2818423C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ЛИНЕЙНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2156535C2 |
| ЛИНЕЙНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 2016 |
|
RU2617209C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ЛИНЕЙНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2181522C2 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2167487C2 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2161364C2 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2167486C2 |
| ЛИНЕЙНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 2009 |
|
RU2390090C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ РЕВЕРСИВНЫЙ ДВИГАТЕЛЬ | 2008 |
|
RU2368061C1 |
Изобретение относится к электротехнике и может быть использовано как исполнительный элемент для прецизионных перемещений в оптико-механических приборах, в технологическом оборудовании для микроэлектроники, в системах автоматического наведения, в механических сканирующих устройствах и пьезоприводах. Технический результат состоит в увеличении жесткости конструкции и конструктивной независимости двигателя от величины стержня. Линейный шаговый пьезоэлектрический двигатель содержит основание, приводной механизм, левый и правый прижимающие механизмы, включающие пьезоэлементы и гибкие шарниры, направляющий и выходной стержни. Направляющий и выходной стержни выполнены в виде единого цилиндрического стержня. Приводной механизм представляет собой одноконтурный механический преобразователь, состоящий из рамки с гибкими шарнирами, внутри которой установлены два пьезоэлемента и проставка между ними. Прижимающие механизмы представляют собой двухконтурные механические преобразователи, состоящие из внешней и внутренней рамок, расположенных перпендикулярно друг к другу и содержащие гибкие шарниры. Внешняя рамка содержит два пьезоэлемента, каждый из которых с одной стороны имеют проставку, а с другой стороны опорную площадку, которая крепится к рамке. На внутренней рамке закреплены губки захвата стержня с возможностью их перемещения внутри проставки. Прижимающие и приводной механизмы являются единым неразъемным элементом. 5 ил.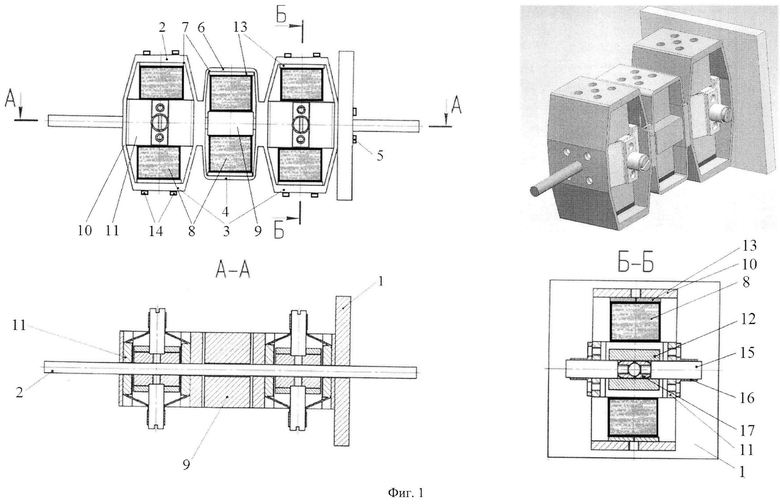
Линейный шаговый пьезоэлектрический двигатель, состоящий из основания, левого прижимающего механизма, приводного механизма и правого прижимающего механизма, включающих пьезоэлементы и гибкие шарниры, направляющего и выходного стержней, отличающийся тем, что направляющий и выходной стержни выполнены в виде единого цилиндрического стержня, при этом приводной механизм представляет собой одноконтурный механический преобразователь, состоящий из рамки с гибкими шарнирами, внутри которой установлены два пьезоэлемента и проставка между ними, а прижимающие механизмы представляют собой двухконтурные механические преобразователи, состоящие из внешней и внутренней рамок, расположенных перпендикулярно друг к другу, и содержащие гибкие шарниры, при этом внешняя рамка содержит два пьезоэлемента, каждый из которых с одной стороны имеет проставку, с другой стороны - опорную площадку, которая крепится к рамке, а на внутренней рамке закреплены губки захвата стержня с возможностью их перемещения внутри проставки, причем прижимающие и приводной механизмы являются единым неразъемным элементом.
| CN 104410323 A, 11.03.2015 | |||
| ЛИНЕЙНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 2016 |
|
RU2617209C1 |
| RU 22390090 C1, 20.05.2010 | |||
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ЛИНЕЙНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2156535C2 |
| Пьезоэлектрический линейный шаговый двигатель | 1977 |
|
SU720576A1 |
| CN 103326616 A, 25.09.2013. | |||

