Изобретение относится к области пьезотехники, а именно к области разработки и изготовления линейных пьезоэлектрических двигателей.
Известна пьезоприводная система, состоящая из нескольких пьезоприводов, которые могут последовательно удлиняться и сдвигаться, перемещая подвижной элемент в соответствии с управляющими сигналами (патент US 6977461 ВВ).
Недостатки этого устройства состоят в необходимости изготовления сопрягающихся деталей с очень высокой точностью (доли микрона) и в сложности реализации линейных сдвигов.
Наиболее близким к предлагаемому изобретению является пьезоэлектрический двигатель на основе "перистальтики", состоящий из трех, связанных между собой, пьезоэлектрических цилиндров, надетых на металлический стержень, при этом первый и третий цилиндры охватывают стержень без зазора, а второй - с зазором. При подаче на цилиндры последовательности импульсов напряжения стержень совершает поступательное перемещение в виде последовательности шагов (ТИИЭР, т.66, №6, июнь 1978).
Недостатки этого устройства заключаются в сложности его изготовления, так как требуется высокая точность изготовления подвижного стержня и сопрягающихся с ним пьезоцилиндров, а также в высокой чувствительности устройства к температурным деформациям стержня и пьезоцилиндров, что снижает надежность его работы.
Задачей, на решение которой направлено настоящее изобретение, является достижение технического результата, заключающегося в повышении надежности устройства, упрощении его конструкции и сборки. Поставленная задача решается в линейном пьезоэлектрическом двигателе, содержащем ползун с направляющими, пьезоприводную систему, источник питания, причем пьезоприводная система состоит из корпуса, выполненного в виде замкнутой рамки с упругим элементом в виде двух плоских пружин на ее боковых гранях, в которую вставлен и жестко зажат пьезоэлемент продольных перемещений, а на концах рамки выполнены связанные с ней упругими шарнирами рычажные мультипликаторы линейных перемещений, одно плечо которых находится в связи с пьезоэлементами поперечных перемещений, а второе плечо вставлено в направляющие ползуна с натягом, равным или меньше величины их перемещения под воздействием пьезоэлементов поперечных перемещений.
Отличительными признаками изобретения являются признаки, характеризующие выполнение пьезоприводной системы, состоящей из корпуса, выполненного в виде замкнутой рамки с упругим элементом в виде двух плоских пружин на ее боковых гранях, в которую вставлен и жестко зажат в ней пьезоэлемент продольных перемещений, а на концах рамки выполнены упруго связанные с ней рычажные мультипликаторы линейных перемещений, одно плечо которых находится в связи с пьезоэлементами поперечных перемещений, а второе плечо упруго вставлено в направляющие ползуна с натягом, равным или меньше величины их перемещения под воздействием пьезоэлементов поперечных перемещений.
Указанная совокупность отличительных признаков позволяет достичь технического результата, заключающегося в повышении надежности работы устройства и упрощении его конструкции.
Сущность изобретения поясняется чертежом, где показана конструкция устройства.
Устройство содержит ползун 1 с направляющими А, пьезоприводную систему, состоящую из замкнутой рамки 2 с упругим элементом 3 в виде двух плоских пружин на ее боковых гранях, пьезоэлемента 4 для продольных перемещений, вставленного в рамку 2 и жестко зажатого в ней винтом 5, рычажных мультипликаторов линейных перемещений 6, 7, 8, 9 и поджатых винтами 16, 17.
Пьезприводная система вставлена противоположными концами рычагов мультипликаторов с натягом в направляющие А ползуна 1 и взаимодействует с ним в точках 18, 19, 20, 21 рычагов 6, 7, 8, 9. Пьезоэлементы 4, 14, 15 подсоеденены к источнику питания, реализующему необходимую последовательность управляющих импульсов.
Описанное устройство работает следующим образом.
Благодаря тому, что рычаги 6, 7, 8, 9 вставлены в направляющие ползуна с натягом, в отсутствие управляющих импульсов, он застопорен от перемещений относительно пьезприводной системы силами трения в точках 18, 19, 20, 21. При подаче напряжения на пьезоэлементы 14, 15 они удлиняются, рычаги 6, 7, 8, 9 проворачиваются в упругих шарнирах 10, 11, 12, 13 и освобождают ползун 1. Для достижения высокой точности и надежной работы устройства величина перемещений рычагов в точках 18, 19, 20, 21 должна быть равна или меньше величины натяга. В этом случае ползун 1 находится в постоянном контакте с рычагами 6, 7, 8, 9. Установка величины натяга производится винтами 16, 17.
При подаче напряжения на пьезоэлемент 4, благодаря наличию упругого элемента 3, рамка 2 удлиняется и обеспечивает механизм линейного перемещения ползуна 1 относительно пьезоприводной системы. Подачей последовательности управляющих импульсов на пьезоэлементы 4, 14, 15 реализуется поступательное перемещение ползуна относительно пьезоприводной системы в виде последовательности шагов.
Благодаря рычажным мультипликаторам свободный ход рычагов 6, 7, 8, 9 в точках 18, 19, 20, 21 в несколько раз превышает относительно малое удлинение пьезоэлементов поперечных перемещений 14, 15, что снижает требования к точности изготовления деталей, повышает надежность работы и упрощает процесс сборки пьезодвигателя.
Пример реализации заявляемого устройства.
Направляющие А ползуна 1 и рычаги мультипликаторов 6, 7, 8, 9 выполнены из закаленной стали и обработаны шлифованием.
Пьезоэлемент 4 для продольных перемещений изготовлен из керамики ЦТС-46 в виде многослойного пьезоэлемента актюатора длиной 45 мм и сечением 6×6 мм. При подаче напряжения 100 В он удлиняется на 35-40 мкм. Пьезоэлементы 14, 15 для поперечных перемещений изготовлены также из керамики ЦТС-46 в виде многослойных пьезоэлементов сечением 6×6 мм и длиной 10 мм. Их удлинение при напряжении 100 В составляет 8 мкм. Рычажные мультипликаторы, взаимодействующие с пьезоэлементами 14, 15, обеспечивают увеличение свободного хода рычагов 6, 7, 8, 9 в точках 18, 19, 20, 21 до 20-25 мкм.
Пьезоприводная система вставляется в направляющие А ползуна 1 с натягом 15 мкм. Этим обеспечивается ее надежная фиксация относительно ползуна 1.
Изготовленный экспериментальный образец пьезодвигателя обеспечивал шаговый режим работы в диапазоне 0-300 Гц со скоростью до 9 мм/с при тяговом усилии 0,3 кг.
| название | год | авторы | номер документа |
|---|---|---|---|
| Линейный шаговый пьезоэлектрический двигатель | 2019 |
|
RU2727610C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 1990 |
|
RU1829863C |
| УСТРОЙСТВО УПРАВЛЕНИЯ САМОЧУВСТВИТЕЛЬНЫМ ЛИНЕЙНЫМ ПЬЕЗОЭЛЕКТРИЧЕСКИМ АКТЮАТОРОМ | 2015 |
|
RU2608842C1 |
| УСИЛИВАЮЩИЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ АКТЮАТОР ПОВЫШЕННОЙ ТОЧНОСТИ ПОЗИЦИОНИРОВАНИЯ | 2016 |
|
RU2624773C1 |
| ЛИНЕЙНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 2016 |
|
RU2617209C1 |
| УСИЛИВАЮЩИЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ АКТЮАТОР | 2015 |
|
RU2603353C1 |
| Линейный реверсивный вибродвигатель | 2018 |
|
RU2684395C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ РЕВЕРСИВНЫЙ ДВИГАТЕЛЬ | 2008 |
|
RU2368061C1 |
| ПЬЕЗОДВИГАТЕЛЬ | 2008 |
|
RU2376697C1 |
| ПЬЕЗОДВИГАТЕЛЬ | 2018 |
|
RU2686091C1 |
Изобретение относится к области пьезотехники и может быть использовано в линейных пьезоэлектрических двигателях. Сущность: линейный пьезоэлектрический двигатель содержит ползун с направляющими, пьезоприводную систему, источник питания. Пьезоприводная система состоит из замкнутой рамки с упругим элементом в виде двух плоских пружин на ее боковых гранях. В рамку вставлен и зажат в ней пьезоэлемент продольного удлинения. На концах рамки выполнены связанные с ней упругими шарнирами рычажные мультипликаторы линейных перемещений. Одно плечо каждого мультипликатора связано с пьезоэлементом поперечных перемещений, а второе плечо вставлено в направляющие ползуна с натягом, равным или меньше величины их перемещения под воздействием пьезоэлементов поперечных перемещений. Технический результат: повышение надежности работы устройства, упрощение конструкции и сборки. 1 ил.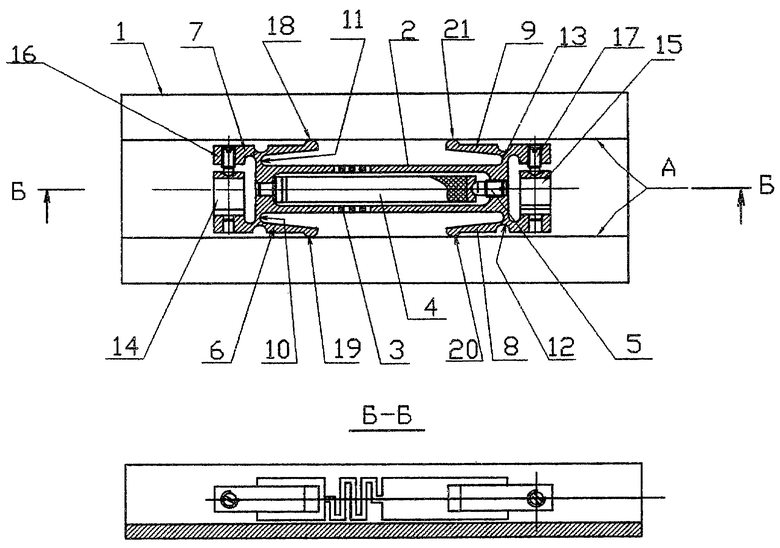
Линейный пьезоэлектрический двигатель, содержащий ползун с направляющими, пьезоприводную систему, источник питания, отличающийся тем, что пьезоприводная система состоит из корпуса, выполненного в виде замкнутой рамки с упругим элементом в виде двух плоских пружин на ее боковых гранях, в которую вставлен и жестко зажат пьезоэлемент продольных перемещений, а на концах рамки выполнены связанные с ней упругими шарнирами рычажные мультипликаторы линейных перемещений, одно плечо которых находится в связи с пьезоэлементами поперечных перемещений, а второе плечо вставлено в направляющие ползуна с натягом, равным или меньше величины их перемещения под воздействием пьезоэлементов поперечных перемещений.
| Пьезоэлектрический линейный шаговый двигатель | 1978 |
|
SU752560A1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ЛИНЕЙНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 1996 |
|
RU2181522C2 |
| ПРЕЦИЗИОННЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ШАГОВЫЙ МЕХАНИЗМ ПЕРЕМЕЩЕНИЯ | 2005 |
|
RU2291551C2 |
| CN 101227156 A1, 23.07.2008 | |||
| DE 102006048238 A1, 31.03.2007. | |||

