Изобретение относится к пьезоэлектрическим двигателям для использования в приборах и системах автоматики, приборостроения, робототехники, авиакосмической, автомобильной отрасли.
Известны различные типы пьезоэлектрических двигателей для использования в системах автоматики и машиностроительных конструкциях. Например, реверсивный пьезодвигатель [Патент РФ №2055442. Реверсивный вибродвигатель/ Агапова Л.С., Ильин А.Г., Яценко В.К.], содержащий корпус, в котором размещены ротор в подшипниковых опорах и вибратор, представляющий собой два пьезоэлемента, установленных под углом друг к другу. Концы пьезоэлементов соединены башмаком. Крепление вибратора к корпусу осуществляется через пружину, соединенную с башмаком. Ротор расположен внутри угла, образованного пьезоэлементами. Или одночастотный волновой трубчатый пьезодвигатель [Soonho Park. Single vibration mode standing wave tubular piezoelectric ultrasonic motor //Theses and dissertations, Toronto. - 2011. - P. 3]. Устройство состоит из пьезотрубки, сформированной из четырех пьезоэлементов, двух роторов, жестко закрепленных на валу вибродвигателя и расположенных на торцах пьезотрубки. При подаче сдвинутых во времени синусоидальных напряжений на пластине пьезотрубки образуется круговое поле упругих механических напряжений, которое вращает оба ротора и вал вибродвигателя. Известно также устройство - пьезоэлектрический двигатель конструкции Т. Сашида [Soonho Park. Single vibration mode standing wave tubular piezoelectric ultrasonic motor // Theses and dissertations, Toronto. - 2011. - P. 5], состоящее из пьезоактюатора, расположенного под углом к поверхности ротора. При подаче сигнала на пьезоактюатор механические усилия воздействуют на поверхность ротора под углом за счет фрикционного контакта тангенциальной составляющей силы, вызывающей вращательный момент двигателя.
Наиболее близким к заявляемому устройству является пьезоэлектрический двигатель конструкции Х.В. Барта [Kenji Uchino. Piezoelectric ultrasonic motors: overview // Smart Mater. Struct. - 1998. - P. 274] - прототип. Устройство состоит из неподвижного корпуса, ротора с валом в подшипниках, двух пьезоэлементов с толкателями (прямого и обратного хода), жесткозакрепленных на неподвижном корпусе. При подаче на пьезоэлемент синусоидального напряжения пьезоэлемент удлиняется и создает механическое усилие на толкатель, за счет фрикционного контакта и несоосного приложения силы на ротор образуется вращающий момент на валу двигателя.
Основными недостатками прототипа являются низкий коэффициент полезного действия устройства, невысокая прочность в узлах крепления пьезоэлемента, также возможность заклинивания подвижных частей двигателя. Кроме того, увеличение мощности устройства возможно только за счет увеличения объема и мощности пьезоэлемента.
Выше перечисленные недостатки исключает предложенная конструкция вращательного пьезоэлектрического двигателя.
Технический результат, достигаемый при осуществлении предлагаемого изобретения, состоит в повышении коэффициента полезного действия пьезодвигателя и уменьшении его габаритных размеров, возможности обратного вращения, увеличения удельной мощности, увеличения ресурса и надежности конструкции за счет уравновешенности конструкции и вращательно-фрикционного режима передачи момента на ротор.
Технический результат достигается тем, что вращательный пьезоэлектрический двигатель содержит неподвижный корпус, ротор с валом в подшипниковых опорах неподвижного корпуса, внутри неподвижного корпуса коаксиально размещен подвижный корпус, который соединен с неподвижным корпусом упругими элементами, на подвижном корпусе жестко закреплены два пьезоэлемента с толкателями для прямого вращения ротора и два пьезоэлемента с толкателями для обратного вращения ротора, причем пьезоэлементы с толкателями с одним направлением вращения размещены диаметрально противоположно, при этом источник питания пьезоэлементов с толкателями имеет один выходной канал для прямого вращения ротора и один выходной канал для обратного вращения ротора, причем один из пьезоэлементов с толкателем для обоих направлений вращения подключен через фазовращатель источника питания.
Сущность изобретения поясняется рисунками.
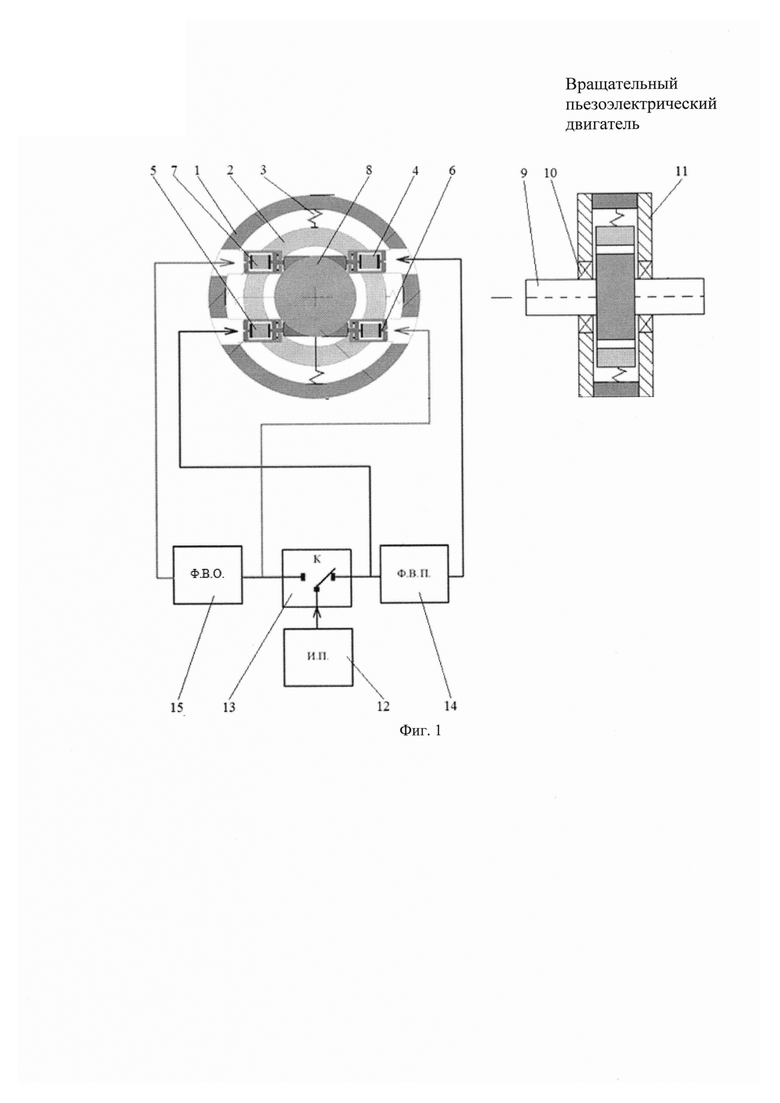
Фиг. 1 - Состав вращательного пьезоэлектрического двигателя.
Вращательный пьезоэлектрический двигатель на фиг. 1 содержит два корпуса: внешний неподвижный корпус 1 и внутренний подвижный корпус 2, соединенные между собой упругими элементами 3, во внутреннем подвижном корпусе жестко закреплены пьезоэлементы с толкателями 4, 5, 6, 7 - два для прямого вращения 4 и 5 и два для обратного вращения 6 и 7 ротора 8 с валом 9, который размещен в подшипниковых опорах 10 в щитках 11 неподвижного корпуса.
Высокочастотный источник питания 12 через коммутатор 13 подключается к пьезоэлементу с толкателем 5 напрямую и на 4 через фазовращатель прямого хода 14 для синфазной подстройки работы пьезоэлементов с толкателями 5 и 4, для обратного вращения через другой контакт коммутатора (при переключении коммутатора) подключается пьезоэлемент с толкателем 6 напрямую и пьезоэлемент с толкателем 7 через фазовращатель обратного вращения 15 для синфазной подстройки работы пьезоэлементов с толкателями 6 и 7.
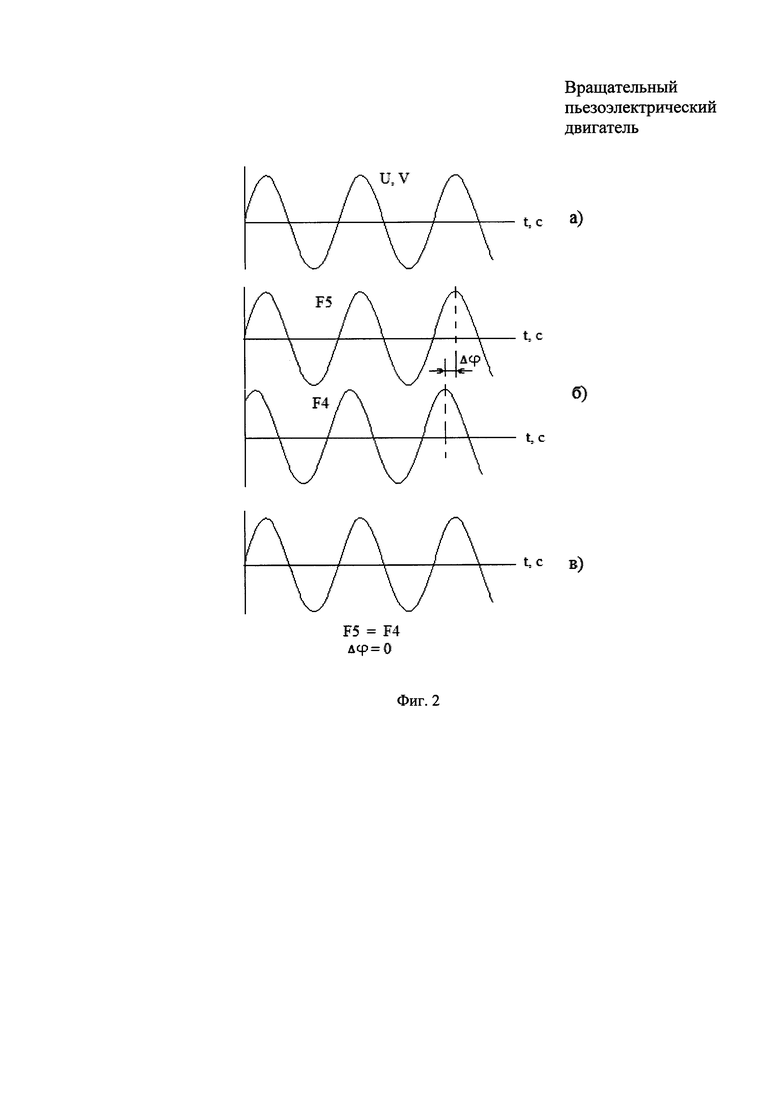
Фиг. 2 - Графики входного напряжения на пьезоэлементы.
Для эффективной работы пьезодвигателя необходимо, чтобы силы пьезоэлементов с толкателями (например, 5 и 4) не имели временного сдвига фаз, то есть работали совершенно синфазно (Фиг. 2а). Невозможно произвести абсолютно одинаковые пьезоэлементы и поэтому даже при одинаковых сигналах возбуждения реакции пьезоэлементов с толкателями 5 и 4 будут не совпадать по фазе, что существенно снижает суммарный момент пьезодвигателя (Фиг. 2б). Поэтому на пьезоэлемент с толкателем 4 сигнал возбуждения подается через фазовращатель прямого вращения 14, на котором компенсируется разность фаз работы пьезоэлементов с толкателями 5 и 4 (Фиг. 2в).
Вращательный пьезоэлектрический двигатель работает следующим образом.
При подключении источника питания 12 через коммутатор 13 к одному пьезоэлементу с толкателем 5 напрямую и к другому, для синфазной подстройки вибросмещения, пьезоэлементу с толкателем 4 через фазовращатель 14, пьезоэлементы с толкателями 4 и 5 удлиняются и создают суммарный вращающий момент на роторе 8, за счет фрикционного трения вместе с ротором 8 поворачивается подвижный корпус 2 с жестко закрепленными в нем пьезоэлементами с толкателями 4, 5, 6, 7 на упругих элементах 3. При снятии питания с пьезоэлементов с толкателями 4 и 5 механический контакт пьезоэлементов с толкателями 4 и 5 с ротором 8 пропадает и подвижный корпус 2 с жестко закрепленными в нем пьезоэлементами с толкателями 4, 5, 6, 7 за счет упругих элементов 3 возвращается в исходное состояние относительно неподвижного корпуса вращательного пьезоэлектрического двигателя.
С повторением данного процесса происходит вращение ротора 8 пьезоэлектрического двигателя против часовой стрелки.
Обратное вращение пьезоэлектрического двигателя.
При подключении источника питания 12 через переключенный коммутатор 13 к одному пьезоэлементу с толкателем 6 напрямую и к другому для синфазной подстройки вибросмещения пьезоэлементу с толкателем 7 через фазовращатель 15, пьезоэлементы с толкателями 6 и 7 удлиняются и создают суммарный вращающий момент на роторе 8, за счет фрикционного трения вместе с ротором 8 поворачивается подвижный корпус 2 с жестко закрепленными в нем пьезоэлементами с толкателями 4, 5, 6, 7 на упругих элементах 3. При снятии питания с пьезоэлементов с толкателеями 6 и 7 механический контакт пьезоэлементов с толкателями 6 и 7 с ротором 8 пропадает и подвижный корпус 2 с жестко закрепленными в нем пьезоэлементами с толкателями 4, 5, 6, 7 за счет упругих элементов 3 возвращается в исходное состояние относительно неподвижного корпуса вращательного пьезоэлектрического двигателя.
С повторением данного процесса происходит вращение ротора 8 пьезоэлектрического двигателя по часовой стрелке.
Из известных авторам источников информации и патентных материалов не известна совокупность признаков, сходных с совокупностью признаков заявленного объекта.
ЛИТЕРАТУРА
1. Пат. 2055442 Российская федерация, МПК H02N 2/10, Реверсивный вибродвигатель / Агапова Л.С., Ильин А.Г., Яценко В.К.
2. Soonho Park. Single vibration mode standing wave tubular piezoelectric ultrasonic motor // Theses and dissertations, Toronto. - 2011. - 136 p.
3. Kenji Uchino. Piezoelectric ultrasonic motors: overview // Smart Mater. Struct. - 1998. - P. 273-285.
| название | год | авторы | номер документа |
|---|---|---|---|
| Линейный реверсивный вибродвигатель | 2018 |
|
RU2684395C1 |
| ЛИНЕЙНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 2016 |
|
RU2617209C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ РЕВЕРСИВНЫЙ ДВИГАТЕЛЬ | 2008 |
|
RU2368061C1 |
| МНОГОКООРДИНАТНЫЙ ПЬЕЗОДВИГАТЕЛЬ | 1999 |
|
RU2166832C1 |
| Линейный шаговый пьезоэлектрический двигатель | 2019 |
|
RU2727610C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 1990 |
|
RU2017314C1 |
| РЕВЕРСИВНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 1992 |
|
RU2062545C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ | 1992 |
|
RU2061296C1 |
| Пьезоэлектрический двигатель | 1990 |
|
SU1831760A3 |
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ САМОЧУВСТВИТЕЛЬНЫМ УЛЬТРАЗВУКОВЫМ ПЬЕЗОЭЛЕКТРИЧЕСКИМ ДВИГАТЕЛЕМ | 2015 |
|
RU2631332C2 |
Изобретение относится к электротехнике и может быть использовано в приборах и системах автоматики, приборостроения, робототехники, авиакосмической, автомобильной отраслях. Технический результат состоит в повышении кпд, удельной мощности уменьшении габаритных размеров, возможности обратного вращения, в увеличении ресурса и надежности конструкции за счет уравновешенности конструкции и вращательно-фрикционного режима передачи момента на ротор. Вращательный пьезоэлектрический двигатель содержит неподвижный корпус, ротор с валом в подшипниковых опорах неподвижного корпуса. Внутри неподвижного корпуса коаксиально размещен подвижный корпус, который соединен с неподвижным корпусом упругими элементами. На подвижном корпусе жестко закреплены два пьезоэлемента с толкателями для прямого вращения ротора и два пьезоэлемента с толкателями для обратного вращения ротора. Пьезоэлементы с толкателями с одним направлением вращения размещены диаметрально противоположно. Источник питания пьезоэлементов с толкателями имеет один выходной канал для прямого вращения ротора и один выходной канал для обратного вращения ротора. Один из пьезоэлементов с толкателем для обоих направлений вращения подключен через фазовращатель источника питания. 2 ил.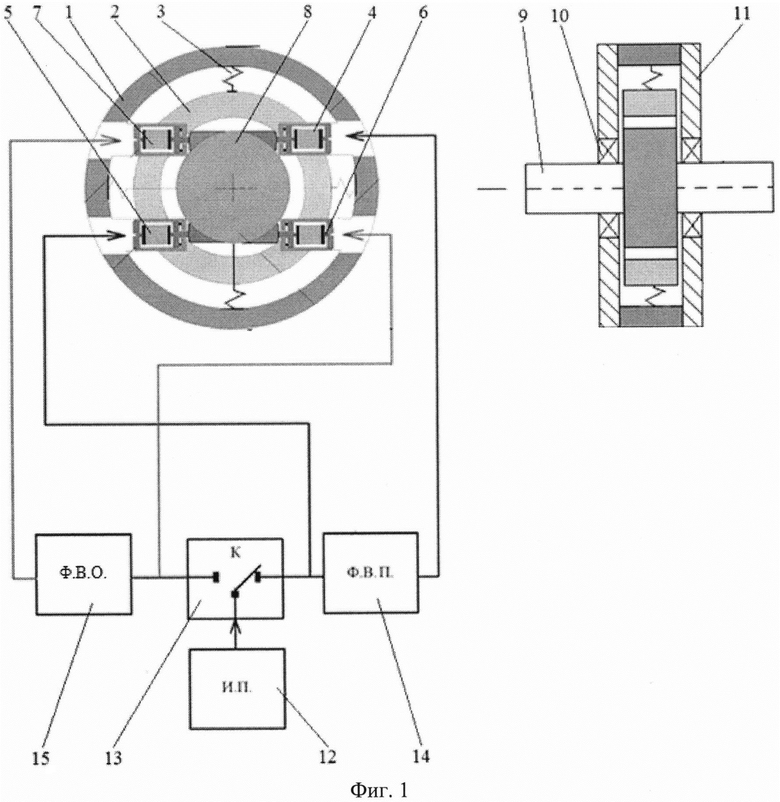
Вращательный пьезоэлектрический двигатель, содержащий неподвижный корпус, ротор с валом в подшипниковых опорах неподвижного корпуса, два пьезоэлемента с толкателями прямого и обратного хода, отличающийся тем, что дополнительно внутри неподвижного корпуса коаксиально размещен подвижный корпус, который соединен с неподвижным корпусом упругими элементами, на подвижном корпусе жестко закреплены два пьезоэлемента с толкателями для прямого вращения ротора и два пьезоэлемента с толкателями для обратного вращения ротора, причем пьезоэлементы с толкателями с одним направлением вращения размещены диаметрально противоположно, при этом источник питания пьезоэлементов с толкателями имеет один выходной канал для прямого вращения ротора и один выходной канал для обратного вращения ротора, причем один из пьезоэлементов с толкателем для обоих направлений вращения подключен через фазовращатель источника питания.
| RU 2055442 C1 | |||
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
| Волновой электродвигатель | 1975 |
|
SU612357A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| СПОСОБ ПРОИЗВОДСТВА ПЛИТ ИЗ РИСОВОЙ ЛУЗГИ | 1992 |
|
RU2041812C1 |
| US 5144187 A, 01.09.1992 | |||
| JPS61142978 A, 30.06.1986 | |||
| US 2015167801 A1, 18.06.2015 | |||
| US 2005269907 A1, 08.12.2005 | |||
| WO 2014013443 A1, 23.01.2014 | |||
| US 2012146461 A1, 14.06.2012 | |||
| US 2012204674 A1, 16.08.2012. | |||

