Изобретение относится к океанографической технике, а именно - к морским измерительным системам, предназначенным для исследования мелкомасштабной турбулентности в приповерхностном слое моря и имеющим кабельное соединение измерительной аппаратуры с морской стационарной платформой.
Для расчета потоков тепла, соли и других растворенных веществ в водном столбе моря необходимо учитывать большое количество параметров, влияющих на интенсивность вертикального и горизонтального обмена. Оценка этих потоков для различных внешних условий среды является одной из важнейших задач в гидрофизике.
Измерения мелкомасштабной турбулентности на различных горизонтах, исследуемых как в режиме позиционирования, так и в режиме зондирования, выдвигают особые требования к самой измерительной системе.
Так, для волнового приповерхностного слоя необходимо располагать датчики выше корпуса измерительного прибора, чтобы исключить влияние самого прибора на турбулентные потоки (которые направлены вниз). Поэтому в режиме зондирования при таком расположении датчиков применяют метод измерений путем подъема прибора с глубоких слоев моря к поверхностным. При этом самому измерительному прибору необходимо обеспечить возможность надежной стабилизации при перемещениях и остановках на требуемых горизонтах для проведения измерений в режиме позиционирования, а также для установки датчиков максимально близко к поверхности (не выше горизонта расположения впадин поверхностных волн) без выхода датчиков в атмосферу при изменении волновой обстановки.
Известна измерительная система [The MSS family. e-mail@sea-sun-tech.com.] для проведения исследований в «стоячей воде» (в озере или другом некрупном водоеме), включающая погружное устройство в виде профилографа семейства MSS - цилиндрического контейнера, на одном конце которого расположены датчики, и увеличенный в диаметре блок плавучести, обеспечивающий верхнее положение датчиков относительно погружного устройства. Другой конец погружного устройства, его выход, подключен к специальному кабелю, который снабжен добавочной плавучестью. Далее, от добавочной плавучести, кабель пропущен через блок донного якоря, затем заведен на закрепленную на платформе лебедку с токосъемником и подключен к бортовой аппаратуре платформы. Эта система может производить измерения как в позиционном режиме, установкой погружного устройства на выбранном горизонте, так и в режиме зондирования - методом всплывания устройства датчиками вверх до поверхности моря со скоростью, согласованной со скоростью спуска кабеля лебедки.
Сходными с признаками заявленного изобретения являются такие признаки аналога:
- зафиксированный в приповерхностном слое на заданном горизонте приборный контейнер (погружное устройство), который имеет датчики, установленные в верхней части контейнера и подключенные к измерительной аппаратуре;
- использование гибкой электросвязи для передачи информации от погружного устройства к бортовой аппаратуре, а также использование блоков для передвижения этой гибкой связи.
Недостатками аналога является следующее:
- в режиме позиционирования, при фиксации погружного устройства на каком-то горизонте, данная система, по сути, является притопленной буйковой станцией, конструкция которой подвержена многочисленным помехам, обусловленным воздействием ветровых волн [Руководство по гидрологическим работам в океанах и морях. Ленинград: Гидрометеоиздат, 1977 г., с. 476], турбулентных пульсаций ветровых течений (как на погружное устройство, так и на добавочную плавучесть), что лишает возможности получения достоверных оперативных данных измерений;
- при подъеме устройства в режиме зондирования возможно заметное рысканье измерительной системы во встречном потоке;
- в режиме зондирования, при проведении серии измерений, погружное устройство не обеспечивает постоянства траектории своего движения из-за его недостаточной положительной плавучести (в конструкцию даже включена добавочная плавучесть, которая в принципе не решает этой проблемы).
Все это обусловливает недостаточную эффективность и надежность исследований заданного слоя вод водоема.
Известно устройство [Патент Российской Федерации №2549250 на изобретение «Измерительная система для исследования мелкомасштабной турбулентности в приповерхностном слое моря». Авторы: Барабаш В.А., Самодуров А.С., Чухарев A.M. Опубл. 20.04.2015 г., Бюл. №11] для исследования приповерхностных слоев открытых водоемов. Эта измерительная система наиболее близко подходит к заявленному изобретению и выбрана в качестве прототипа.
Измерительная система-прототип базируется на стационарной морской платформе и содержит зафиксированный на заданном горизонте в приповерхностном слое моря приборный контейнер, в верхней части которого установлены датчики, подключенные к измерительной аппаратуре, базирующейся на платформе. Приборный контейнер снабжен средством контроля своего положения в пространстве и закреплен вертикально в кардане силовой рамы. Силовая рама выполнена в виде горизонтально расположенного кольца, к которому симметрично, то есть в точках, расположенных через 120°° по окружности, прикреплены три равно натянутые гибкие силовые связи. Одной из этих гибких связей является кабель-трос, подключенный к установленным в приборном контейнере датчикам и средству контроля положения контейнера. Кабель-трос от силовой рамы пропущен через блок, закрепленный на конце стрелы, которая закреплена другим своим концом на нижней палубе платформы с возможностью подъема вверх в вертикальной плоскости относительно места закрепления. Далее, кабель-трос пропущен через блок, закрепленный на нижней палубе платформы на линии оси стрелы, и через лебедку с токосъемником подключен к установленной на платформе измерительной аппаратуре. Каждая из двух других гибких связей, выполненных в виде стальных тросов, пропущена через один из блоков, закрепленных на нижней палубе платформы симметрично относительно линии оси стрелы, причем эти два блока вместе с блоком, закрепленным на конце стрелы, в плане являются вершинами равностороннего треугольника, на медиане которого расположен приборный контейнер. Далее, каждая из двух упомянутых гибких связей соединена с одной из двух других лебедок, установленных на борту платформы. К нижней части приборного контейнера прикреплен на стропе заданной длины обтекаемый груз заданного веса.
Прототип имеет следующие признаки, сходные с признаками заявленного изобретения: стационарная платформа, на которой с возможностью фиксирования своего положения установлен снабженный средством контроля своего положения приборный контейнер с датчиками, которые расположены в верхней части контейнера и подключены к измерительной аппаратуре; при этом приборный контейнер установлен вертикально в кардане силовой рамы, выполненной в виде горизонтально расположенного кольца, к которому равномерно по окружности прикреплены три натянутые гибкие связи; одной из этих связей является кабель-трос, который подключен к датчикам и средству контроля положения приборного контейнера; кабель-трос пропущен через блок, закрепленный на конце стрелы, которая закреплена другим своим концом на нижней палубе платформы с возможностью подъема вверх в вертикальной плоскости относительно места закрепления; далее кабель-трос пропущен через блок, закрепленный на нижней палубе платформы на линии оси стрелы, и через лебедку с токосъемником подключен к установленной на платформе измерительной аппаратуре; каждая из двух других гибких связей выполнена в виде равно натянутых тросов, которые пропущены, соответственно, через один из блоков, закрепленных на нижней палубе платформы симметрично относительно линии оси стрелы, причем эти два блока вместе с блоком, закрепленным на конце стрелы, в плане являются вершинами равностороннего треугольника, на медиане которого установлен приборный контейнер; далее, каждая из двух упомянутых гибких связей соединена с одной из двух других лебедок, установленных на платформе; к нижней части приборного контейнера прикреплен на стропе заданной длины обтекаемый груз заданного веса.
Система-прототип осуществляет установку измерительных датчиков на заданный горизонт в приповерхностном слое моря в зоне, удаленной от платформы, то есть в естественной среде. При этом она обеспечивает контроль положения датчиков в пространстве, положение их именно на заданном горизонте, и надежную стабилизацию этого положения. Система позволяет осуществлять мобильное перемещение датчиков и последовательную их установку на любые другие заданные горизонты, причем также с обеспечением контролируемой стабилизации их положения.
Работа прототипа в позиционном режиме характеризуется надежностью и эффективностью, обеспечивает высокую точность измерений гидрофизических параметров.
Однако при работе в режиме зондирования, при восстановлении вертикальных профилей измеряемых гидрофизических параметров, прототип не всегда обеспечивает требуемую информативность измерений, а следовательно, и точность построения искомого профиля вследствие неизбежных пропусков в цикле измерений из-за того, что для переустановки датчиков с горизонта на горизонт требуется определенное время. При решении некоторых задач, например, при контроле влияния на морскую воду антропогенных выбросов, оценке влияния локальных структур на вертикальное распределение температуры и турбулентный обмен этот недостаток прототипа особенно очевиден. Другим недостатком в режиме зондирования является то, что фиксирование положения датчиков осуществляется только после установки их на очередном горизонте.
В основу изобретения поставлена задача создания профилирующей измерительной системы для исследования турбулентности в подповерхностных водных структурах, в которой за счет признаков, характеризующих особенности метода перемещения датчиков в процессе позиционных и зондирующих измерений, метода постановки и переустановки датчиков с горизонта на горизонт, за счет обеспечения возможности стабилизации текущего положения датчиков в процессе их перемещения, а также за счет особенности расположения датчиков относительно стационарной морской платформы обеспечивается новое техническое свойство - возможность непрерывных измерений вертикального профиля гидрофизических параметров в пределах цикла зондирования и обеспечение серий циклов таких непрерывных зондирований. Другим новым техническим свойством является обеспечение надежной стабилизации текущего положения датчиков на приборном контейнере во время его движения при зондировании и возможность мобильного, с минимальными трудозатратами, перехода системы в длительный позиционный режим работы для исследования на выбранных горизонтах временной изменчивости гидрофизических характеристик.
Указанные новые технические свойства обусловливают достижение технического результата изобретения - повышение точности измерений в режиме зондирования и обеспечение проведения серий таких зондирований, с сохранением возможности последующих позиционных измерений с высокой точностью. Это обусловливает повышение эффективности и надежности исследования заданного приповерхностного слоя моря, расширяет спектр исследуемых явлений.
Поставленная задача решается тем, что в измерительной системе, имеющей указанные выше общие с прототипом существенные признаки, новым является следующее: приборный контейнер установлен под блоком, закрепленным на конце стрелы, причем с возможностью фиксирования своего текущего положения во время своего движения в пространстве; силовая рама выполнена с возможностью поворота приборного контейнера относительно оси ее кардана на заданный угол; силовая рама снабжена тремя рымами, к одному из которых прикреплен силовой такелажной оснасткой кабель-трос, а к двум другим ее рымам прикреплены две другие гибкие связи соответственно; на каждой из этих двух гибких связей, на одинаковом заданном расстоянии от силовой рамы, закреплен быстросъемной оснасткой обтекаемый груз одного и того же заданного веса; эти грузы одинаковы, и их суммарный вес в воде меньше, на заданную величину, веса в воде груза, прикрепленного к нижней части приборного контейнера.
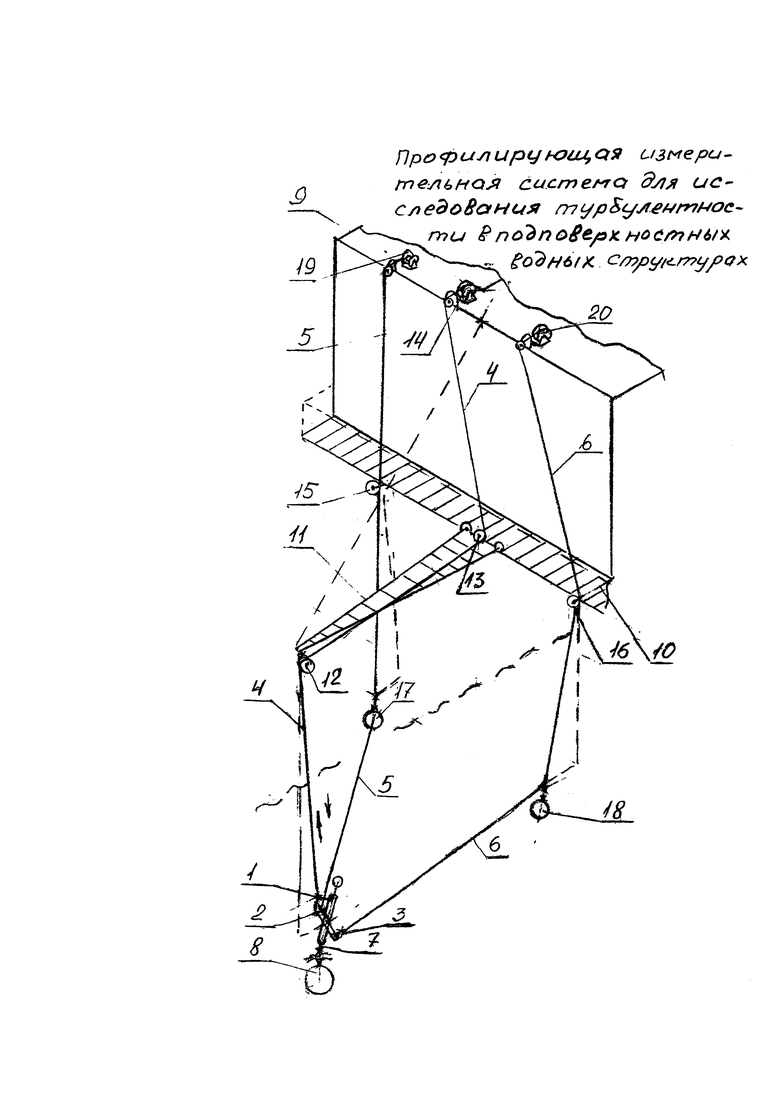
Изобретение поясняется с помощью чертежа, на котором в изометрии представлен конкретный пример исполнения устройства.
Заявленная измерительная стабилизирующая система содержит приборный контейнер 1, в верхней части которого установлены датчики (на чертеже не обозначены), измеряющие, например, три компоненты пульсации вектора скорости течения, температуру и электропроводность воды, пульсации температуры и электропроводности, гидростатическое давление. Приборный контейнер 1 снабжен средством контроля своего положения в пространстве (на чертеже не показано), которое в данном случае выполнено в виде датчиков азимута, крена и дифферента, сконструированных на основе акселерометров.
Приборный контейнер 1 закреплен в кардане 2 силовой рамы 3, выполненной в виде кольца, к которому равномерно, то есть в точках, расположенных через 120° по окружности, прикреплены три натянутые гибкие силовые связи 4, 5, 6. Одной из этих гибких связей является кабель-трос 4, подключенный через гермоввод к внутренней электронике, и силовой такелажной оснасткой - к рыму рамы 3. В качестве двух других гибких силовых связей 5, 6 использованы, например, тонкие стальные тросы нужного диаметра, например, диаметром 3,3÷4 мм с пределом прочности на разрыв р>600÷800 кг. К нижней части приборного контейнера 1 на стропе 7 заданной длины присоединен обтекаемый в вертикальных перемещениях (сферической формы) груз 8 заданного веса. Длина стропа, форма и размер груза 8 приборного контейнера 1 в сумме обеспечивают расположение груза 8 ниже области активного возмущающего действия волн, а обтекаемость груза 8 необходима для уменьшения сопротивления при спуске-подъеме приборного контейнера 1 со скоростью зондирования V=0,8-1 м/с (скорость зондирования методом подъема рамы с прибором зависит от скорости подъема кабель-троса 4 лебедкой).
На морской стационарной платформе 9, на ее нижней палубе 10, закреплена стрела 11 с возможностью ее подъема вверх в вертикальной плоскости относительно места ее закрепления. Преимущественно стрела 11 расположена горизонтально и так, что ее ось перпендикулярна краю нижней палубы 10. На выступающем конце стрелы 11 закреплен блок 12, через который пропущен кабель-трос 4. Далее, кабель-трос пропущен через блок 13, который закреплен на нижней палубе 10 на линии оси стрелы 11, и через установленную на верхней палубе платформы лебедку 14 с токосъемником подключен к бортовой аппаратуре, к компьютеру в лаборатории, оборудованной на платформе 9.
Гибкие связи, тросы 5 и 6, равно натянуты и пропущены через один из двух блоков соответственно 15 и 16, которые закреплены на нижней палубе 10 симметрично относительно линии оси стрелы 11. Причем блоки 15 и 16 установлены так, что совместно с блоком 12, закрепленном на выступающем конце стрелы 11, они в плане, в данном случае в горизонтальной плоскости, являются вершинами равностороннего треугольника. Ось стрелы 11 является медианой этого треугольника, а боковые гибкие связи, размерами между блоками 12-15 и 12-16 - равными сторонами этого треугольника. Для обеспечения натяжения гибких связей 5 и 6 в радиальных направлениях эти гибкие связи снабжены грузами 17 и 18 соответственно, которые имеют обтекаемую одинаковую (сферическую) форму и одинаковый заданный вес. Натяжение кабель-троса 4 грузом 8 и натяжение в радиальных направлениях гибких связей 5, 6 под действием грузов 17, 18 обеспечивает положение приборного контейнера 1 в одной вертикальной плоскости с блоком 12, который закреплен на консольном конце стрелы 11. Конструкция силовой рамы 3 обеспечивает поворот (наклон) в ней приборного контейнера 1 (в ее кардане 2) на заданный, острый, угол от вертикали, в данном случае на 15°, до упора боковой поверхности контейнера с рамой. Далее гибкие связи 5, 6 соединены с установленными на верхней палубе платформы 9 лебедками 19 и 20 соответственно.
Система снабжена и другими элементами, традиционно используемыми в гидрофизическом оборудовании (на чертеже не показаны или не обозначены): грузовой лебедкой для спуска-подъема стрелы 11, стрелами к лебедкам, кран-балками и обводными блоками к ним, такелажной и тросовой оснасткой.
Вес в воде груза 8 выбирают в зависимости от горизонтальных сил давления [Руководство по гидрологическим работам в океанах и морях. Гидрометеоиздат, Ленинград, 1977 г., с. 476] течения, волнения, воздействия на боковую поверхность приборного контейнера 1, рамы 3, кабель-троса 4, линий связи 5, 6, грузов 17, 18. Эти силы компенсируются использованием груза 8 большего веса в воде. Натяжение боковых линий связи 5, 6 обеспечивается весом в воде малых грузов 17, 18, каждый из которых подвешен на гибкой линии связи (5, 6) в точке блока (15, 16) и отклонен от линии подвеса по горизонтали [Н.С. Пискунов. Дифференциальное и интегральное исчисления. М.: Физматгиз, 1961 г., с. 497-499]. При этом возникает сила, направленная к центру подвеса и растягивающая отрезки гибких связей 5, 6, соединяющих раму 3 с грузами 17, 18, и эти силы ограничивают горизонтальные перемещения рамы 3 с приборным контейнером 1 при своем движении в режиме зондирования - подъеме с глубины электролебедкой кабель-троса 4, рамы 3 с постоянной скоростью.
В отличие от трех равных сил натяжения гибких связей в прототипе силы натяжения в предлагаемой системе измерения различны. Кабель-трос 4, соединенный с большим грузом 8 через раму 3, кардан 2, контейнер 1, обеспечивает спуск-подъем их под действием веса в воде этого груза, при этом приборный контейнер 1 под действием этого груза отклонен до упора в кардане 2 от вертикали с целью обеспечения допустимого расстояния датчиков от помех обтекания кабель-троса 4 при движении.
С целью обеспечения спуска кабель-троса с электролебедки на холостом ходу вес в воде груза 8 выбирается, например, до 100 кг, а боковые малые грузы 17, 18 - по 45 кг. Грузы 17 и 18 закреплены на гибких связях 5 и 6 как на сторонах равностороннего треугольника со стороной, например, L=9,2 м.
В прототипе приборный контейнер расположен примерно на трети длины стрелы, то есть на расстоянии 3 м от стационарной платформы. Для проведения серии зондирований этого недостаточно, необходимо максимальное удаление приборного контейнера с датчиками от платформы. В заявленном устройстве это достигается установкой приборного контейнера в одной вертикальной плоскости с блоком 12, то есть на конце стрелы, в максимальном удалении от зоны влияния платформы 9. При этом рама 3 под действием сил, образованных за счет смещения грузов 17, 18 от линии их подвеса на блоках 15, 16, при спуске-подъеме движется по постоянной траектории, ограниченной смещениями по горизонтали.
Определяем эти горизонтальные силы P1 и Р2 в зависимости от смещения крепления грузов 17, 18 от линии их подвеса на блоках 15, 16 при:
- расстояние блоков от места установки до поверхности моря - 3,5 м;
- заглубление грузов от поверхности моря принимаем 3,5 м;
- общее расстояние от блока до груза по вертикали 3,5+3,5=7 (м);
- принимаем величину смещения крепления грузов по горизонтали до 2 м или до 1,5 м;
- малые грузы 17, 18 принимаем равными по 45 кг весом в воде.
Тогда:
P1=45*2,0/7=12,8 кг - при 2-х метрах;
р2=45*1,5/7=9,7 кг - при 1,5-х метрах.
На раму 3 за счет подвеса грузов 17 и 18 со смещением от вертикальной линии их подвеса приложены две равные силы, направленные к месту подвеса грузов и стремящиеся сместить раму 3 с грузом 8 по медиане равностороннего треугольника, и при этом за счет смещения груза 8 с рамой 3 от линии подвеса кабель-троса 4 на блоке 12 возникает сила противодействия этому перемещению, то есть, система будет находиться в равновесии, при котором приборный контейнер 1 при своем перемещении при зондировании или в позиционном положении будет находиться каждый раз в стационарном положении, что контролируется средством контроля положения контейнера.
Методика постановки измерительной системы и измерение мелкомасштабных флуктуаций гидрофизических величин приповерхностного слоя моря осуществляется следующим образом.
Измерения проводятся в слое моря от поверхности, например, до 25 метров глубины. Предварительно закрепляют приборный контейнер 1 вертикально в кардане 2 его несущей рамы 3. Стрела 11 на нижней палубе 10 научно-исследовательской платформы 9 поднята вверх. Кабель-трос 4 с верхней палубы платформы последовательно пропускают с электролебедки 14 с токосъемником через блоки 13, 12 и вытравливают с конца стрелы 11. Силовую часть кабель-троса 4 крепят силовой такелажной оснасткой к одному из трех рымов рамы 3, а его электрическую линию через герметичный ввод подключают к приборному контейнеру 1 - к измерительным датчикам и средству контроля положения приборного контейнера. Другой конец кабель-троса 4 подключают к бортовой измерительной аппаратуре.
Две другие гибкие связи, тросы 5 и 6, от лебедок 19 и 20 пропускают соответственно через блоки 15 и 16 и крепят, также силовой такелажной оснасткой, к двум другим рымам силовой рамы 3, причем узлы крепления этих гибких связей совместно с узлом крепления первой гибкой связи 4 (кабель-троса) расположены по кольцу рамы 3 равномерно - через 120° по ее окружности.
К нижней части приборного контейнера 1 через такелажную оснастку крепят строп 7 с грузом 8, к которому крепят оттяжку из капронового фала в виде дуплиня.
На три гибкие связи 4, 5, 6 лебедками 14, 19, 20 дают нагрузку, поднимая на стреле 11 приборный контейнер 1, и выводят груз 8 за пределы нижней палубы 10 платформы. Затем опускают на гибких связях груз 8 и приборный контейнер 1 в воду. Стопорят опускание приборного контейнера 1 в воде и проводят поверку электрического соединения кабель-троса 4 с приборным контейнером 1, и работоспособность всей системы в сборе. Окончив поверку, груз 8 отсоединяют от дуплиня, а гибкие связи 4, 5, 6 поочередно вытравливают, выводя приборный контейнер 1 на расчетный горизонт до выхода за пределы блоков 15 и 16 расчетных мест быстросъемной такелажной оснастки с быстросъемным соединением, например, разрезными звеньями с грузами 17, 18 на гибких связях из троса.
После соединения грузов 17 и 18 гибкие связи 4-6 поочередно вытравливают до выхода груза 8, совместно с рамой 3 с карданом 2 и приборным контейнером 1, непосредственно под блок 12, при этом приборный контейнер 1 отклоняется от вертикали до упора в кардане 2, обеспечивая отдаление датчиков от кабель-троса 4 на безопасное расстояние от его обтекания. При этом на раму 3 действует больший груз 8, обеспечивая натяжение кабель-троса 4 вертикально, а боковые гибкие связи 5, 6, симметрично присоединенные к раме 3, обеспечивают ее горизонтальное натяжение за счет горизонтального смещения подвеса и крепления грузов 17 и 18 на гибких связях от вертикальной линии их подвеса.
В местах соединения каждой из трех гибких линий с грузами возникают силы натяжения от веса в воде груза за счет смещения установки груза по горизонтали от точки подвеса по вертикали на блоках. Эти силы в точках подвеса грузов по горизонтали раскладываются на две силы [Н.С. Пискунов. Дифференциальное и интегральное исчисления. М.: Физматгиз, 1961 г., с. 497-499]: первая направлена вниз вертикально, а вторая направлена перпендикулярно линии подвеса груза в точке крепления на гибкой линии. Вторая сила, направленная по гибкой линии, обеспечивает напряжения растяжения части гибкой линии, соединяющей раму 3 с закрепленным грузом, и обеспечивает стабилизацию вертикального положения приборного контейнера 1 при его движении спуск-подъем во время зондирования.
Требуемое вертикальное положение приборного контейнера 1 и величина его заглубления под блоком 12 контролируется средством контроля положения контейнера 1, и соответствующая информация поступает в лабораторию на платформе.
Для проведения исследований способом зондирования приборный контейнер 1 в раме 3, соединенный с гибкими связями, опускается на нижний расчетный горизонт на кабель-тросе 4, при этом удлиняется только кабель-трос 4, а гибкие связи 5, 6 с грузами 17, 18 заранее заглублены на расчетную глубину установки этих грузов. Спуск производится электролебедкой на холостом ходу, а боковые гибкие линии, напряженные весом своих грузов 17, 18, ограничивают горизонтальные перемещения рамы 3 с контейнером 1, которые демпфируются перемещением малых грузов 17 и 18 и туго натянутыми отрезками гибких линий от места крепления груза до места крепления на раме 3.
При зондировании включается электролебедка на подъем (намотка кабель-троса 4 на барабан лебедки) с постоянной скоростью подъема кабель-троса 4 до подхода датчиков к нижней волновой поверхности (до максимально близкого расстояния к впадинам волн). При этом туго натянутые отрезки гибких линий при спуске-подъеме совершают угловые перемещения по окружности, центром которой является место установки малых грузов. Силовая рама 3 с приборным контейнером 1 и грузом 8 осуществляет вертикальный спуск-подъем по постоянной траектории с заданной, причем любой, скоростью, в требуемом отдалении от опор платформы - в данном случае в 8 м от них.
Заявителем проведены предварительные испытания изобретения в рамках исследований с целью выявления характера и интенсивности воздействия антропогенных стоков загрязняющих веществ на экосистемы прибрежных акваторий на тестовых участках шельфа Крымского полуострова. Одним из таких участков служит район Голубой бухты (поселок Кацивели), на котором расположена исследовательская океанографическая платформа заявителя.
Измерения с помощью комплекса-турбулиметра «Сигма-1», основанного на изобретении, проводились в режиме зондирования, поскольку объемы загрязненной воды от антропогенных выбросов (например, из Аквапарка) могут иметь сравнительно небольшие пространственно-временные масштабы, внутреннюю термохалинную структуру которых можно исследовать только в режиме серий зондирований в периоды их дрейфа мимо исследовательской платформы. В то же время заявленная система обеспечила возможность работы и в позиционном режиме, одновременно с работой других позиционных приборов в периоды отсутствия внешних затоков, что позволило проводить исследования фоновой структуры.
Очень важным преимуществом данного подхода является то, что необходимые характеристики объемов выбросов и фона исследовались с помощью одной и той же системы датчиков.
Испытания заявленной измерительной стабилизирующей системы показали следующее. Первоначально она обеспечивает надежную и стабильную установку приборного контейнера с измерительными датчиками на необходимом заданном горизонте моря для выдержки и успокоения исследуемых слоев, потревоженных при опускании (выводе) измерительного контейнера до места начала зондирования (зондирования методом подъема с глубины). В процессе работы система обеспечивает контроль текущего положения датчиков и надежную стабилизацию (жесткую фиксацию) этого текущего положения. Она легко позволяет производить мобильные перемещения измерительного контейнера по постоянной траектории при серии зондирований и последовательную целенаправленную установку измерительного контейнера, обеспечивает проведение частых зондирований отдельных наиболее интересующих слоев моря при кратковременных установках приборного контейнера с датчиками в позиционном режиме исследований этих слоев. Все это обеспечивает высокую точность научных измерений.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИЗМЕРИТЕЛЬНАЯ СИСТЕМА ДЛЯ ИССЛЕДОВАНИЯ МЕЛКОМАСШТАБНОЙ ТУРБУЛЕНТНОСТИ В ПРИПОВЕРХНОСТНОМ СЛОЕ МОРЯ | 2014 |
|
RU2549250C1 |
| ИЗМЕРИТЕЛЬНАЯ СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ВОДНОЙ СРЕДЫ НА ХОДУ СУДНА (ВАРИАНТЫ) | 2017 |
|
RU2669251C1 |
| Мобильный судовой комплекс для экологического контроля водной среды | 2017 |
|
RU2709216C2 |
| ГЛУБОКОВОДНЫЙ ДОБЫЧНОЙ КОМПЛЕКС И ТЕЛЕУПРАВЛЯЕМЫЙ ПОДВОДНЫЙ РОБОТ | 2002 |
|
RU2214510C1 |
| СИСТЕМА, УСТРОЙСТВО И СПОСОБ ТЕКУЩЕГО КОНТРОЛЯ ПОЛОЖЕНИЯ И ОРИЕНТАЦИИ ТРАНСПОРТНОГО СРЕДСТВА, ПОГРУЗОЧНОГО УСТРОЙСТВА И ГРУЗА ПРИ РАБОТЕ ПОГРУЗОЧНОГО УСТРОЙСТВА | 2012 |
|
RU2623295C2 |
| Подводный лебедочный зонд | 2017 |
|
RU2642677C1 |
| УСТРОЙСТВО ДЛЯ ШВАРТОВКИ СУДОВ ПРЕИМУЩЕСТВЕННО К МОРСКОЙ СТАЦИОНАРНОЙ ПЛАТФОРМЕ | 1997 |
|
RU2118599C1 |
| МОРСКАЯ АВТОНОМНАЯ ДОННАЯ СТАНЦИЯ ДЛЯ СЕЙСМОРАЗВЕДКИ И СЕЙСМОЛОГИЧЕСКОГО МОНИТОРИНГА | 2014 |
|
RU2572046C1 |
| СПУСКОПОДЪЕМНОЕ УСТРОЙСТВО БУКСИРУЕМОЙ ЛИНИИ | 2007 |
|
RU2339536C1 |
| Самовсплывающая портативная донная сейсмическая станция без оставления груза на дне моря | 2022 |
|
RU2796944C1 |
Изобретение относится к океанографической технике, а именно к морским измерительным системам. Профилирующая измерительная система включает морскую стационарную платформу (9), на которой установлен снабженный средством контроля своего положения приборный контейнер (1) с датчиками. Контейнер (1) размещен в вертикальной плоскости под блоком (12), закрепленным на конце стрелы (11), и установлен в кардане (2) силовой рамы (3). К раме (3) прикреплены три натянутые гибкие связи (4-6). Одна из них - кабель-трос (4), подключенный к датчикам и средству контроля положения контейнера (1). Блок (12) закреплен на конце стрелы (11), которая в свою очередь закреплена другим концом на нижней палубе (10) платформы (9). Кабель-трос (4) пропущен через блок (13), закрепленный на нижней палубе (10) платформы. Каждая из гибких связей (5 и 6) выполнена в виде равно натянутых тросов, которые пропущены через один из блоков (15 и 16). К нижней части контейнера (1) прикреплен на стропе заданной длины обтекаемый груз заданного веса (8). Достигается возможность повышения эффективности и надежности исследования заданного приповерхностного слоя моря. 1 ил.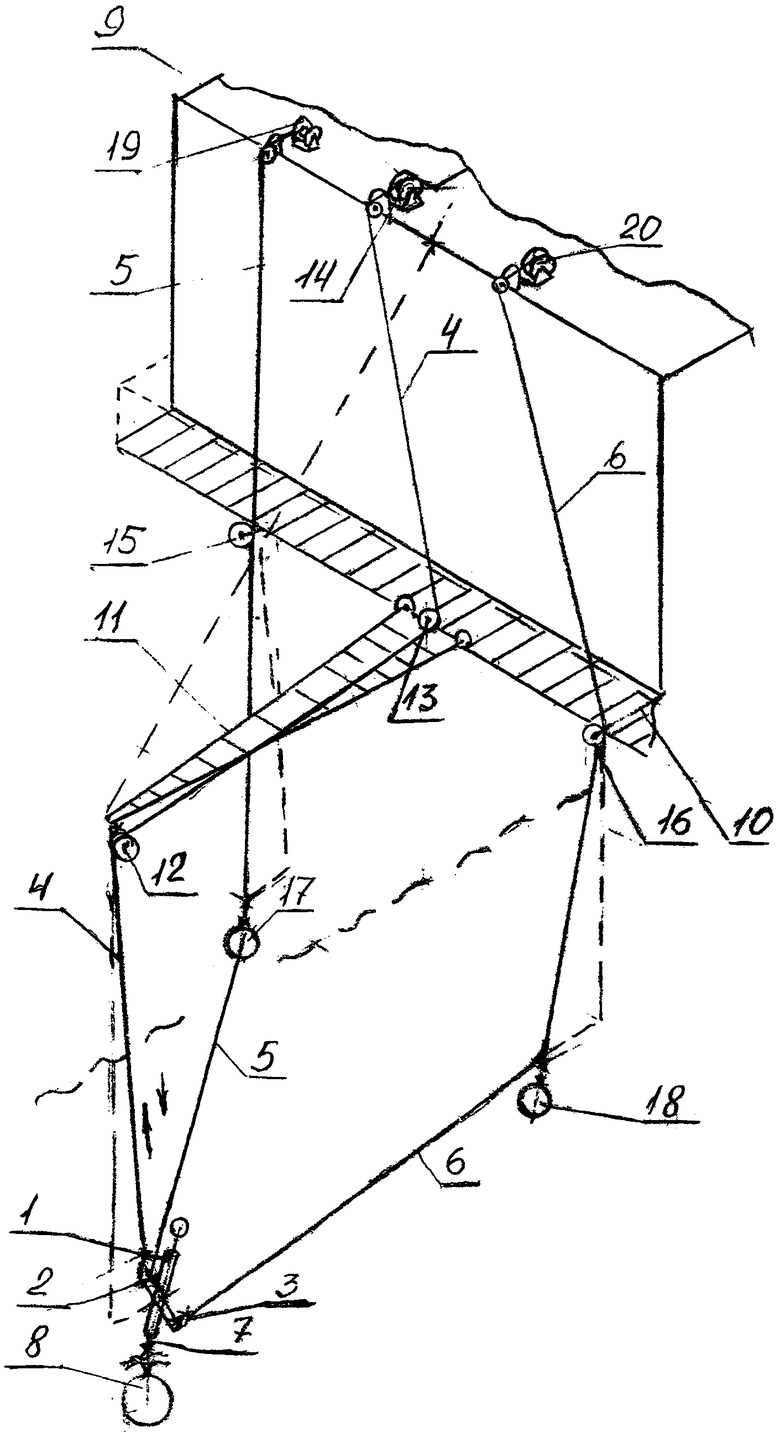
Профилирующая измерительная система для исследования турбулентности в подповерхностных водных структурах, включающая стационарную платформу, на которой с возможностью фиксирования своего положения установлен снабженный средством контроля своего положения приборный контейнер с датчиками, расположенными в верхней части контейнера и подключенными к измерительной аппаратуре, при этом приборный контейнер установлен вертикально в кардане силовой рамы, выполненной в виде горизонтально расположенного кольца, к которому равномерно по окружности прикреплены три натянутые гибкие связи, одной из которых является кабель-трос, который подключен к датчикам и средству контроля положения приборного контейнера и пропущен через блок, закрепленный на конце стрелы, которая закреплена другим своим концом на нижней палубе платформы с возможностью подъема вверх в вертикальной плоскости относительно места закрепления, далее кабель-трос пропущен через блок, закрепленный на нижней палубе платформы на линии оси стрелы, и через лебедку с токосъемником подключен к установленной на платформе измерительной аппаратуре, две другие гибкие связи выполнены в виде равно натянутых тросов, каждый из которых пропущен через один из блоков, закрепленных на нижней палубе платформы симметрично относительно линии оси стрелы, причем эти два блока с блоком, закрепленным на конце стрелы, в плане являются вершинами равностороннего треугольника, на медиане которого установлен приборный контейнер, далее каждая из двух упомянутых гибких связей соединена с одной из двух других лебедок, установленных на платформе, при этом к нижней части приборного контейнера прикреплен на стропе заданной длины обтекаемый груз заданного веса, отличающаяся тем, что приборный контейнер установлен под блоком, закрепленным на конце стрелы, с возможностью фиксации приборного контейнера в одном положении во время движения, силовая рама выполнена с возможностью поворота приборного контейнера относительно вертикали на заданный угол и снабжена тремя рымами, к одному из которых прикреплен силовой такелажной оснасткой кабель-трос, а к двум другим прикреплены соответственно две другие гибкие связи, на каждой из которых, на одинаковом заданном расстоянии от силовой рамы, закреплен быстросъемной оснасткой обтекаемый груз заданного веса, при этом грузы одинаковы и их суммарный вес в воде меньше веса в воде груза, прикрепленного к нижней части приборного контейнера.
| ИЗМЕРИТЕЛЬНАЯ СИСТЕМА ДЛЯ ИССЛЕДОВАНИЯ МЕЛКОМАСШТАБНОЙ ТУРБУЛЕНТНОСТИ В ПРИПОВЕРХНОСТНОМ СЛОЕ МОРЯ | 2014 |
|
RU2549250C1 |
| Устройство для профилактики руд от смерзания | 1953 |
|
SU102129A1 |
| Устройство для измерения наклоновВЕТРОВыХ ВОлН | 1977 |
|
SU821917A1 |
| CN 203427999 U, 12.02.2014. | |||

