Изобретение относится к техническим средствам изучения и освоения морей и океанов с использованием буксируемых подводных аппаратов, способных изменять траекторию своего движения по глубине, и предназначено для выполнения морских исследовательских работ, производя измерения параметров водной среды на ходу судна в заданном диапазоне глубин.
В известных измерительных системах применяются несколько типов буксируемых аппаратов.
Известны наиболее простые измерительные системы, например, на основе запатентованного заявителем, Морским гидрофизическим институтом, буксируемо-зондирующего устройства [патент Украины №14187 на изобретение «Зонд для измерения параметров морской воды на ходу судна» по авторскому свидетельству СССР №1354571]. Зонд представляет собой прочный герметичный обтекаемый корпус с установленными на нем измерителями (датчиками), закрепленный к ходовому концу несущей линии (троса или кабель-троса), в то время как другой конец несущей линии прикреплен к установленному на исследовательском судне барабану специальной быстроходной лебедки, обеспечивающей вытравливание необходимой длины кабель-троса при проведении зондирования. Заглубление зонда при проведении горизонтального разреза на требуемой глубине обеспечивается подбором скорости буксировки, а также длиной вытравленного кабель-троса. Такое устройство позволяет также получать информацию и о вертикальном профиле параметров морской воды на ходу судна - путем вытравливания кабель-троса на ходу судна с заданной скоростью, в зависимости от скорости движения судна и необходимой скорости свободного погружения зонда.
Сходными с признаками заявленного изобретения являются такие признаки этого аналога: заглубленная несущая линия с установленным на ней прочным герметичным обтекаемым корпусом с измерителями, связанными с устройством приема информации.
Существенным недостатком измерительных систем с использованием такого рода зондов является большой период между рядом отдельных вертикальных зондирований, необходимость использования несущей линии (кабель-троса) большой длины, пропорциональной скорости буксировки, а также сложная технология осуществления забортных работ, требующая наличия специального дорогостоящего оборудования (специальной быстроходной лебедки).
В настоящее время одним из наиболее перспективных направлений в методике проведения океанологических работ с использованием буксируемой аппаратуры являются системы с применением носителей океанологических измерителей, буксируемых по волнообразной траектории, так называемых ондуляторов. Попеременно всплывая к поверхности и погружаясь до заданных глубин, ондулятор, несущий комплекс научной аппаратуры, позволяет получать практически непрерывные разрезы по соответствующим параметрам на ходу судна. Как правило, на данные носители устанавливаются CTD измерители или измерители других океанологических параметров, а также поисковые системы рыбопромысловых судов.
Данная технология проведения забортных работ при исследовании моря позволяет значительно сократить количество остановок судна для выполнения зондирования по глубине и, следовательно, затраты дорогостоящего судового времени, а также повысить информативность проводимых измерений.
Известны измерительные системы с применением различных видов носителей-ондуляторов, например таких, как запатентованный заявителем носитель [патент Украины №14168 на изобретение «Подводный буксируемый аппаратурный носитель» по авторскому свидетельству СССР №1519103], буксируемый подводный аппарат [патент Российской Федерации №2419574], а также таких, как представленные в свободном доступе в Интернете носители «AcrobatLTV-50X» фирмы SeaSciences, «AquashuttleMkIII» и «NuShuttle» фирмы Chelsea Technologies Group, «ScanFish», «MiniBAT» фирмы Guideline.
Измерительная система на основе носителя «MiniBAT» фирмы Guideline выбрана в качестве прототипа заявленного изобретения.
Все измерительные системы с использованием носителей-ондуляторов, в том числе и прототип, обеспечивают возможность производить зондирования и получать информацию как о горизонтальном, так и о вертикальном распределении параметров морской воды на ходу судна, однако обладают рядом недостатков, которые обусловлены, в первую очередь, самим способом крепления носителя, а именно - к ходовому концу кабель-троса.
Недостатки этих измерительных систем заключаются в следующем:
- сама методика управления зондированием, технология таких измерений являются сложными и затратными, что снижает эффективность работы. Это объясняется тем, что для обеспечения забортных работ требуется наличие специальной буксирной лебедки, осуществляющей вытравливание или выборку кабель-троса в нужный момент для обеспечения необходимых условий зондирования: для обеспечения измерений на значительной глубине длина кабель-троса должна быть достаточно большая, и при этом диаметр этого кабель-троса должен быть достаточно большим, соответствующим возникающим при этом гидродинамическим нагрузкам;
- период всплытия-погружения (сканирования) носителя при изменении горизонтов зондирования достаточно большой, что снижает информативность измерений;
- при переходе носителя с нижнего горизонта на верхний для проведения исследований в приповерхностном слое моря, на глубинах 0-20 м, возникают технические сложности [труды ВНИРО Левашов Д.Е. Романов А.А, Сапожников В.В 2013 г, том 150], так как большой вес вытравленного кабель-троса, его гидродинамическое сопротивление, а также вес самого носителя с приборным отсеком не дают носителю «всплыть» с максимальной глубины до поверхности, и требуют увеличения скорости буксировки. Результаты проведения исследовательских работ с данными носителями показали, что при скорости буксировки в 11 узлов и длине троса в пределах 200-500 м, меняя длину троса на ходу судна, можно было выбирать среднюю глубину исследуемого слоя в пределах от 20 до 50 м при толщине слоя в 40-45 м. Это снижает оперативность, а, следовательно, и информативность измерений параметров приповерхностного слоя. Улучшить условия перехода носителя с нижнего горизонта на верхний и наоборот (сканирования) не позволяет свойственное таким системам техническое противоречие: для «всплытия» носителя необходимо увеличение скорости его буксировки и/или увеличение площади несущего крыла носителя, но эти меры значительно увеличивают опасность обрыва кабельной линии и потери научного оборудования, что особенно проявляется при неблагоприятных погодных условиях, при сильном волнении. Таким образом, при измерениях в приповерхностном слое моря такие системы являются неэффективными, что сужает область их применения.
В основу изобретения поставлена задача создания измерительной системы на основе автоматически управляемого, способного работать в автономном режиме, подводного буксируемого носителя океанологических измерителей, совокупностью существенных признаков которой обеспечиваются новые технические свойства: возможность выполнения вертикальных разрезов со значительно меньшим периодом сканирования, что необходимо для оперативной оценки изменчивости процессов, происходящих в водной среде; возможность осуществления информативных и экономически эффективных измерений океанологических параметров в самом приповерхностном слое водной среды; значительное сокращение затрат на оснащение судов.
Указанные новые свойства обуславливают достижение технического результата изобретения: повышение информативности, а также улучшение эксплуатационных характеристик системы - повышение ее надежности и экономической эффективности.
Заявленное изобретение представляет собой группу из двух устройств-вариантов, которые связаны между собой настолько, что образуют единый изобретательский замысел, решают поставленную задачу принципиально одним и тем же путем, но не могут быть охарактеризованы одним общим пунктом формулы изобретения.
Указанные новые свойства и достигаемый технический результат присущи каждому из вариантов заявленного изобретения и обеспечиваются за счет совокупности существенных признаков (каждого из его вариантов), характеризующих следующие особенности: исполнения несущей линии и ее постановки; постановки носителя на несущей линии; исполнения устройства управления движением носителя и расположения этого устройства; исполнения устройства заглубления и его постановки; расположения и исполнения устройства приема информации и средств питания.
Для первого варианта изобретения сходными с признаками прототипа являются такие признаки: установленный на кабель-тросе буксируемый подводный носитель с прочным герметичным иснабженным несущим крылом корпусом обтекаемой формы с измерителями, а также устройство заглубления, устройство управления положением носителя, блок питания измерителей и размещенное на судне устройство приема информации. При этом отличительными от прототипа признаками являются: устройствозаглубления выполнено в виде обтекаемого тела заданного веса и заданной формы, закрепленного на нижнем конце кабель-троса, вытравленного на заданную глубину, носитель снабжен роликовыми опорами, выполненными с возможностью движения носителя под действием набегающего потока по кабель-тросу, и тормозом, несущее крыло закреплено с возможностью изменения угла атаки, а устройство управления положением носителя выполнено в виде устройства управления углом атаки несущего крыла, которое содержит блок питания и размещено в корпусе, в котором также размещен блок питания измерителей.
Для второго варианта изобретения сходными с признаками прототипа являются такие признаки: установленный на несущей линии буксируемый подводный носитель с прочным герметичным и снабженным несущим крылом корпусом обтекаемой формы с измерителями, а также устройство заглубления, устройство управления положением носителя, блок питания измерителей и устройство приема информации. При этом отличительными от прототипа признаками являются: устройство заглубления выполнено в виде обтекаемого тела заданного веса и заданной формы, закрепленного на нижнем конце несущей линии, которая в данном варианте изобретения выполнена в виде троса, вытравленного на заданную глубину, носитель снабжен роликовыми опорами, выполненными с возможностью движения носителя под действием набегающего потока по тросу, и тормозом, несущее крыло закреплено с возможностью изменения угла атаки, а устройство управления положением носителя выполнено в виде устройства управления углом атаки несущего крыла, которое содержит блок питания и размещено в корпусе, в котором также размещены блок питания измерителей и устройствоприема информации.
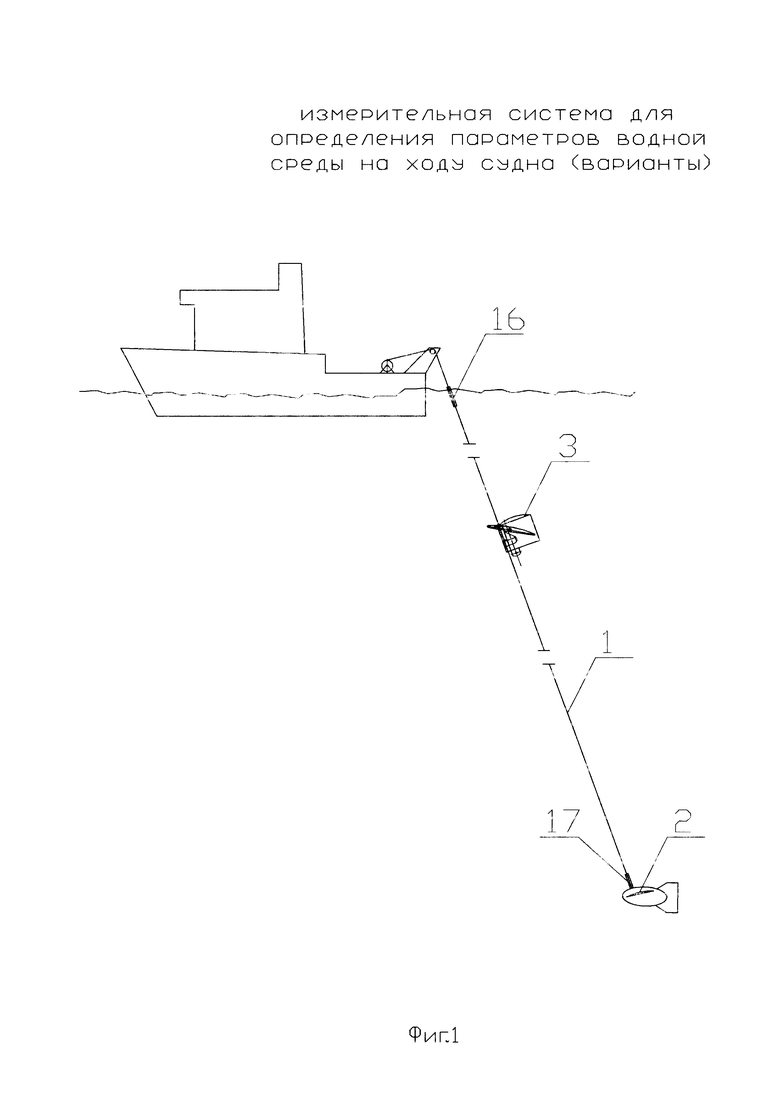
Сущность изобретения поясняется со ссылкой на чертежи, на которых изображено: на фиг. 1 - общий вид измерительной системы; на фиг. 2 - конструкция носителя (в двух проекциях), установленного на несущей линии.
Согласно первому варианту изобретения система содержит (фиг. 1) прикрепленную к су дну через буксирную лебедку (изображены, но позициями не обозначены) несущую линию 1 в виде кабель-троса, на ходовом (нижнем) конце которого закреплено устройство заглубления - заглубитель 2 в виде обтекаемого тела заданного веса и заданной формы. В данном случае заглубитель выполнен в виде каплевидного тела с хвостовым стабилизатором, но может быть выполнен и в виде решетки. На кабель-тросе 1 установлен носитель 3 научной аппаратуры.
Конструкция носителя 3 научной аппаратуры такова, что обеспечивает возможность его движения вдоль несущей линии 1 под действием набегающего потока, а также остановки и фиксирования его положения. Носитель 3 (фиг. 2) представляет собой автоматически управляемое устройство и состоит из прочного герметичного корпуса 4 (приборного контейнера), на двух цилиндрических, лежащих на одной оси, опорах 5 которого подвижно закреплено несущее крыло 6 - его поворот относительно опор 5 изменяет угол атаки и обеспечивает необходимую подъемную или заглубляющую силу при различном угле наклона несущей линии 1. Причем крыло 6 установлено так, чтобы обеспечивалось равенство гидродинамических сил на переднюю и заднюю части крыла - для разгрузки привода изменения угла атаки крыла.
В корпусе 4 размещеноустройство 7 (не изображено, но обозначено позицией) управления углом атаки несущего крыла, содержащее электронный блок формирования команд, датчик крена и дифферента, датчик давления, серводвигатель, а также автономный блок питания в виде батарей (блок питания и другие составляющие блока 7 не изображены и позициями не обозначены).
На корпусе 4 носителя 3 установлен узел 8 крепления носителя к кабель-тросу 1, снабженный двумя роликовыми опорами 9 качения. Одна из роликовых опор 9 снабжена тормозом 10, приводимым в действие по заранее заданной программе, для обеспечения фиксации положения носителя 3 на кабель-тросе для проведения горизонтального разреза на постоянной, заданной глубине, в соответствии с заданным режимом работы.
К нижнему торцу герметичного корпуса 4 носителя прикреплен блок 11 научной аппаратуры - блок с необходимыми измерителями 12 параметров водной среды. Блок 11 снабжен автономным блоком 13 питания измерителей 12, который выполнен в виде блока батарей (не изображен и позицией не обозначен).
Тормоз 10 приводится в действие, по заранее заданной программе, находящимся в корпусе 4 электромагнитным приводом (не изображен и позицией не обозначен), что позволяет проводить горизонтальный разрез на постоянной заданной глубине для обеспечения требований выполнения научно-исследовательских задач. Электромагнитный привод получает питание от блока питания устройства 7 управления углом атаки несущего крыла.
При необходимости передачи информации в реальном времени (по кабель-тросу 1 от блока 11 научной аппаратуры на бортовое устройство) - носитель 3 дополнительно может быть снабжен индуктором 14 связи, выполненным известным образом. Для этого конструкция может предусматривать штатное место для его закрепления - например, на узле 8 крепления носителя к кабель-тросу.
На судне установлено устройство приема информации (не изображено и позицией не обозначено).
Вся конструкция носителя 3 (с корпусом 4, роликовыми опорами 9, тормозом 10, блоком 11 с измерителями 12) снабжена обтекателем 15 для снижения гидродинамического сопротивления.
Для обеспечения безопасности работы носителя 3 несущая линия 1 может быть снабжена (фиг. 1) закрепленными на ней верхним 16 и нижним 17 пружинными амортизаторами, установленными в точках, соответствующих верхнему и нижнему горизонтам зондирования - в этих пределах движется носитель 3. Амортизаторы исключают ударные нагрузки носителя в нештатных ситуациях.
Второй вариант заявленного изобретения (фиг. 1) отличается от первого тем, что в качестве несущей линии 1 используется трос, а носитель 3 представляет собой (фиг. 2) не только автоматически управляемое, но и автономное устройство - за счет того, что устройство 7 управления углом атаки несущего крыла и блок 11 научной аппаратуры снабжены собственными, автономными, блоками питания, а устройство приема (регистрации) информации размещено в корпусе носителя 3, а именно - в блоке 11 научной аппаратуры, и выполнено в виде карты памяти.
Постановка и работа измерительной системы поясняются на конкретном примере осуществления зондирования - по его заданной программе и при имеющемся в наличии судовом оснащении.
Предварительно на конце несущей линии 1 закрепляют заглубитель 2 - обтекаемый, снабженный стабилизатором груз, вес которого выбирают таким, чтобы обеспечить, при заданной скорости буксировки, угол наклона буксирной линии порядка 30° от вертикали. Затем на несущей линии 1 закрепляют нижний пружинный амортизатор 17 и носитель 3 с прикрепленным к нему блоком научной аппаратуры (блоком 11 с измерителями 12), причем несущее крыло 6 носителя 3 установлено на заглубление. Далее несущая линия 1 (которая намотана на барабан буксирной лебедки и пропущена через блок буксирной рамы) вытравливается с барабана буксирной лебедки и таким образом вывешивается за кормой судна.
Далее, на ходу судна, несущая линия 1 вытравливается за борт на длину, обеспечивающую необходимые условия зондирования. Затем на несущей линии 1 закрепляют верхний пружинный амортизатор 16, и несущая линия 1 вытравливается дополнительно - до заглубления амортизатора 16 на глубину порядка одного метра от водной поверхности.
При достижении носителем 3 заданной глубины зондирования устройство 7 управления углом атаки несущего крыла 6 по заранее записанной в нем заданной программе выдает команду на изменение угла атаки (подается питание на серводвигатель) для обеспечения всплытия носителя 3 с блоком (контейнером) научной аппаратуры. При достижении носителем 3 с научной аппаратурой верхней заданной точки глубины зондирования устройство 7 по команде управляющей программы подает команду на изменение угла атаки крыла (подается питание на серводвигатель) для обеспечения погружения носителя с блоком научной аппаратуры до заданной глубины зондирования. Таким образом, амплитуда и период сканирования, совершаемого носителем 3 с блоком научной аппаратуры, обеспечиваются в автоматическом режиме.
Полученные от измерителей 12 научные данные, согласно первому варианту изобретения, поступают по несущей линии 1 в устройство приема информации, размещенное на борту судна, а согласно второму варианту изобретения - записываются на карту памяти, размещенной в приборном контейнере 3.
По окончании зондирования производится выборка несущей линии 1 с носителем 3 и блоком научной аппаратуры на борт судна (при установленном малом угле атаки крыла 6 на погружение).
Заявленная система обеспечивает возможность непрерывного автоматического оперативного процесса устойчивых стабильных измерений параметров водной среды, в том числе и приповерхностного слоя. Носитель научной аппаратуры надежен, технологичен в производстве, удобен в эксплуатации. Система имеет широкий диапазон применения и значительно снижает затраты на проведение исследовательских и прикладных работ.
Работа выполнена в рамках государственного задания по теме №0827-2014-0010 «Комплексные междисциплинарные исследования океанологических процессов, определяющих функционирование и эволюцию экосистем Черного и Азовского морей на основе современных методов контроля состояния морской среды и гридтехнологий».
| название | год | авторы | номер документа |
|---|---|---|---|
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2010 |
|
RU2419574C1 |
| Буксируемый подводный гамма-зонд | 2021 |
|
RU2760711C1 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ, ОСНАЩЕННЫЙ ГИДРОАКУСТИЧЕСКОЙ АППАРАТУРОЙ ДЛЯ ОБНАРУЖЕНИЯ ЗАИЛЕННЫХ ОБЪЕКТОВ И ТРУБОПРОВОДОВ | 2010 |
|
RU2463203C2 |
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |
| ГИДРОАКУСТИЧЕСКИЙ ЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2426149C1 |
| БУКСИРУЕМАЯ ЛИНИЯ | 2007 |
|
RU2361773C1 |
| БУКСИРУЕМОЕ УСТРОЙСТВО ДЛЯ КАРТОГРАФИРОВАНИЯ ОБЪЕКТОВ МОРСКОГО ДНА И ИХ ВИЗУАЛЬНОЙ ЗАВЕРКИ | 2018 |
|
RU2679922C1 |
| Судовое подъемно-опускное устройство для буксируемого подводного аппарата | 1982 |
|
SU1096162A1 |
| БУКСИРУЕМОЕ ПОДВОДНОЕ УСТРОЙСТВО С ГОРИЗОНТАЛЬНОЙ СТАБИЛИЗАЦИЕЙ | 1999 |
|
RU2148003C1 |
| Морское патрульное судно для экологического контроля территориальных вод, континентального шельфа и исключительной экономической зоны | 2015 |
|
RU2610156C1 |

Изобретение относится к техническим средствам изучения и освоения морей и океанов с использованием буксируемых подводных аппаратов, способных изменять траекторию своего движения по глубине, и предназначено для выполнения морских исследовательских работ. В первом варианте изобретения система содержит установленный на несущей линии буксируемый подводный носитель с прочным герметичным и снабженным несущим крылом корпусом обтекаемой формы с измерителями, а также устройство заглубления, устройство управления положением носителя, блок питания измерителей и размещенное на судне устройство приема информации. Устройство заглубления выполнено в виде обтекаемого тела заданного веса и заданной формы, закрепленного на нижнем конце кабель-троса, вытравленного на заданную глубину. Носитель снабжен роликовыми опорами, выполненными с возможностью движения носителя под действием набегающего потока по кабель-тросу, и тормозом. Несущее крыло закреплено с возможностью изменения угла атаки, а устройство управления положением носителя выполнено в виде устройства управления углом атаки несущего крыла, которое содержит блок питания и размещено в корпусе. Второй вариант изобретения отличается от первого тем, что в качестве несущей линии используется трос, а носитель представляет собой не только автоматически управляемое, но и автономное устройство, за счет того, что устройство управления углом атаки несущего крыла и блок научной аппаратуры снабжены собственными, автономными, блоками питания, а устройство приема информации размещено в корпусе носителя. Достигается повышение информативности, а также улучшение эксплуатационных характеристик системы - повышение ее надежности. 2 н.п. ф-лы, 2 ил.
1. Измерительная система для определения параметров водной среды на ходу судна, содержащая установленный на кабель-тросе буксируемый подводный носитель с прочным герметичным снабженным несущим крылом корпусом обтекаемой формы с измерителями, а также устройство заглубления, устройство управления положением носителя, блок питания измерителей и размещенное на судне устройство приема информации, отличающаяся тем, что устройство заглубления выполнено в виде обтекаемого тела заданного веса и формы, закрепленного на нижнем конце кабель-троса, вытравленного на заданную глубину, носитель снабжен роликовыми опорами, выполненными с возможностью движения носителя под действием набегающего потока по кабель-тросу, и тормозом, несущее крыло закреплено с возможностью изменения угла атаки, а устройство управления положением носителя выполнено в виде устройства управления углом атаки несущего крыла, которое содержит блок питания и размещено в корпусе, в котором также размещен блок питания измерителей.
2. Измерительная система для определения параметров водной среды на ходу судна, содержащая установленный на несущей линии буксируемый подводный носитель с прочным герметичным снабженным несущим крылом корпусом обтекаемой формы с измерителями, а также устройство заглубления, устройство управления положением носителя, блок питания измерителей и устройство приема информации, отличающаяся тем, что устройство заглубления выполнено в виде обтекаемого тела заданного веса и формы, закрепленного на нижнем конце несущей линии, выполненной в виде троса, вытравленного на заданную глубину, носитель снабжен роликовыми опорами, выполненными с возможностью движения носителя под действием набегающего потока по тросу, и тормозом, несущее крыло закреплено с возможностью изменения угла атаки, а устройство управления положением носителя выполнено в виде устройства управления углом атаки несущего крыла, которое содержит блок питания и размещено в корпусе, в котором также размещены блок питания измерителей и устройство приема информации.
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2010 |
|
RU2419574C1 |
| US 4019453 A1, 26.04.1977 | |||
| SU 1396462 A1, 10.11.1996 | |||
| US 3805730 A, 23.04.1974. | |||

