Область техники, к которой относится изобретение
Настоящее изобретение относится в общем к области систем управления и в частности к системе управления, которая содержит первый активный датчик и второй активный датчик, и к соответствующим способам.
Уровень техники
Освещение офисов составляет почти 30% энергопотребления в зданиях. Поскольку совершенствуется стоимость и энергоэффективность светодиодных (LED) источников света, они становятся жизнеспособной альтернативой флюоресцентным лампам, дополнительно обеспечивая преимущество управления цветом. Установлено, что стратегии управления освещением на основании информации о присутствии обитателя очень эффективны для снижения энергопотребления. Например, в незанятых областях освещение можно ослаблять или гасить. Таким образом, устройство экологичных зданий может выиграть от систем управления освещением, адаптирующихся к присутствию.
Известно, что активные датчики, такие как датчики на ультразвуковой основе, обеспечивают более хорошее обнаружение, чем пассивные инфракрасные датчики в больших объемных пространствах. В физически более крупных областях обыкновенным местом является наличие множества активных датчиков присутствия для надлежащего покрытия обнаружения. Кроме того, известно, что в общем активные датчики более чувствительны, чем пассивные инфракрасные датчики. В WO 2011/151796 A1 для надежного обнаружения присутствия описан ультразвуковой матричный датчик, который при сопряжении с системой управления освещением обеспечивает надежное выполнение освещения.
В «Sensor Scheduling for Target Tracking in Networks of Active Sensors», Acta Automatica Sinica, ноябрь 2006 г., авторов Xiao et al. отмечено, что одна проблема с сетями беспроводных датчиков из активных датчиков заключается в интерференции между датчиками, когда близлежащие ультразвуковые датчики работают одновременно. Такая интерференция может вести к ошибкам обнаружения датчиков и с ней следует бороться должным образом. Интерференция между датчиками также вводит технологические ограничения на конструкцию и реализацию сетей беспроводных датчиков. Планирование для датчиков используют для того, чтобы избегать интерференции между датчиками и реализовывать взаимодействие между датчиками. Сеть синхронизируют, а время разделяют на временные интервалы. Период для каждого слота должен быть больше, чем время затухания ультразвуковой волны в операции определения дальности. В этой публикации, чтобы избежать интерференции между датчиками, для датчиков создают такое планирование, что во время любого временного интервала только один датчик в области интерференции между датчиками может воспринимать цель.
Раскрытие изобретения
Обнаружено, что перекрестная интерференция между активными датчиками (такими как датчики на основе ультразвука или радиочастоты) представляет собой проблему при применении для обнаружения в помещениях, а также вне помещений. Перекрестная интерференция между активными датчиками в общем зависит от размеров пространства, мониторинг которого осуществляют, и присутствия/отсутствия объектов в нем. Например, где объект перемещают (или добавляют/удаляют), картина перекрестной интерференции между датчиками склонна изменяться. Это влияет на надлежащую работу систем обнаружения присутствия.
При применении систем восприятия присутствия может быть необходимо избегать потенциальной перекрестной интерференции между активными передачами. Система обнаружения присутствия в совокупности должна функционировать должным образом, при этом каждый индивидуальный датчик присутствия должен быть способен определять информацию, связанную с присутствием, в его области покрытия. Задача настоящего изобретения состоит в преодолении этих проблем и создании системы управления, которая содержит множество активных датчиков, выполненных с возможностью обнаруживать, смягчать и использовать перекрестную интерференцию для усовершенствования эксплуатационных характеристик системы.
Согласно первому аспекту изобретения приведенные выше и другие цели достигают посредством системы управления, которая содержит первый активный датчик, который содержит передатчик, выполненный с возможностью передачи в первом временном интервале первого зондового сигнала, который содержит два ненулевых импульса, передаваемые в соответствующих частях первого временного интервала; и второй активный датчик, который содержит массив принимающих датчиков, выполненный с возможностью приема первого зондового сигнала; и блок обработки, выполненный с возможностью определения во втором временном интервале разности между сигналами, принимаемыми в первой части второго временного интервала, и сигналами, принимаемыми во второй части второго временного интервала, причем блок обработки выполнен с возможностью обнаружения интерференции.
Предпочтительно первый аспект делает возможным обнаружение перекрестной интерференции, в частности, в меняющихся средах. Перекрестная интерференция может варьировать во времени, среди прочего, из-за добавления, удаления или перемещения объектов, помещенных между активными датчиками системы управления. Предпочтительно это может делать возможным усовершенствование эксплуатационных характеристик обнаружения присутствия.
Предпочтительно второй активный датчик также способен обнаруживать интерференцию без необходимости передавать собственный зондовый сигнал.
Согласно вариантам осуществления второй активный датчик дополнительно содержит передатчик, выполненный с возможностью передачи во втором временном интервале второго зондового сигнала, который содержит два ненулевых импульса, передаваемых в соответствующих частях второго временного интервала, причем массив принимающих датчиков дополнительно выполнен с возможностью приема эхо второго зондового сигнала, и при этом блок обработки, посредством определения разности, выполнен с возможностью исключения двух ненулевых импульсов второго зондового сигнала.
Предпочтительно это ведет к дополнительно усовершенствованному обнаружению взаимной корреляции, поскольку также второй активный датчик передает зондовый сигнал, эхо которого используют во время оценки присутствия какой-либо взаимной корреляции.
Согласно вариантам осуществления второй активный датчик дополнительно содержит передатчик, выполненный с возможностью передачи во втором временном интервале и в ответ на прием массивом принимающих датчиков первого зондового сигнала оповещающего сигнала, относящегося к добавлению второго активного датчика в систему управления, и где первый активный датчик дополнительно содержит массив принимающих датчиков, выполненный с возможностью приема оповещающего сигнала.
Новый активный датчик (в терминологии формулы изобретения: второй активный датчик) в связи с этим можно добавлять в существующую систему управления, которая уже содержит один или более активных датчиков (в терминологии формулы изобретения: первый активный датчик). Обнаруживаемая перекрестная интерференция может в связи с этим облегчать добавление нового активного датчика в систему управления.
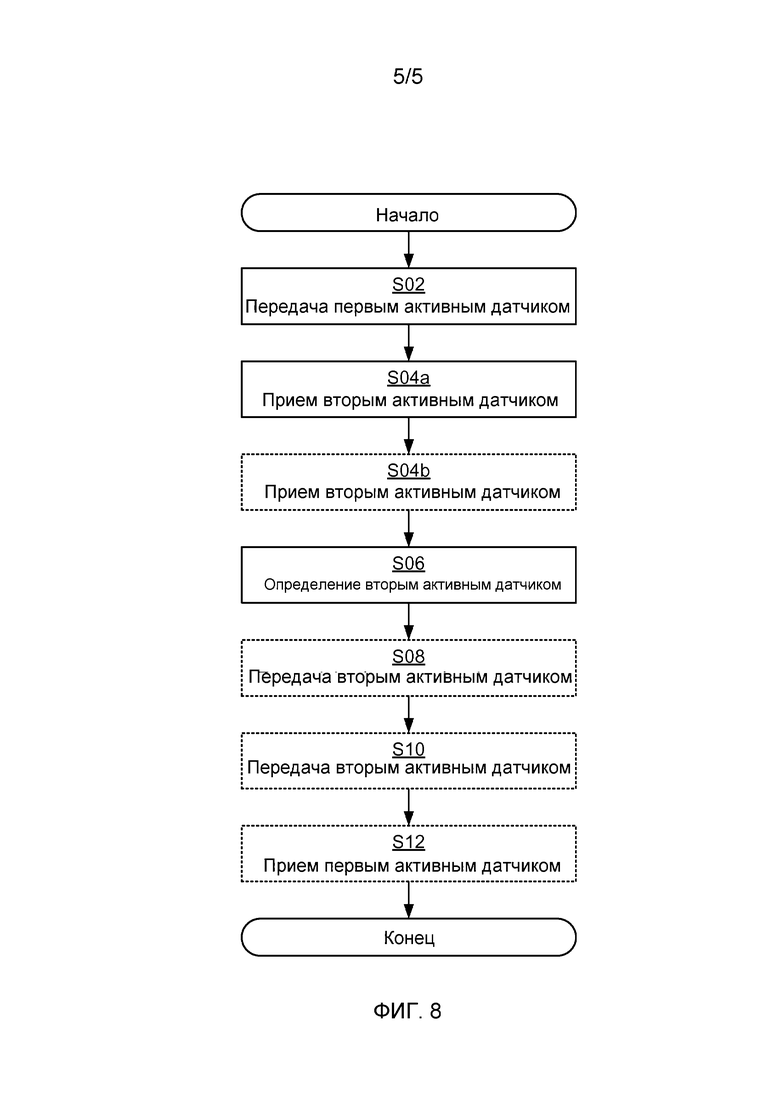
Согласно второму аспекту изобретения цель достигают посредством способа обнаружения интерференции в системе управления, который включает передачу, посредством первого активного датчика, в первом временном интервале первого зондового сигнала, который содержит два ненулевых импульса, передаваемых в соответствующих частях первого временного интервала; прием, посредством второго активного датчика, первого зондового сигнала; и определение, посредством второго активного датчика, во втором временном интервале разности между сигналами, принимаемыми в первой части второго временного интервала, и сигналами, принимаемыми во второй части второго временного интервала, второй активный датчик в связи с этим должен быть выполнен с возможностью обнаружения интерференции.
Следует отметить, что изобретение относится ко всем возможным сочетаниям признаков, перечисленных в формуле изобретения. Аналогичным образом, преимущества по первому аспекту применимы ко второму аспекту, и наоборот.
Краткое описание чертежей
Приведенные выше и другие аспекты настоящего изобретения ниже описаны более подробно со ссылкой на сопровождающие чертежи, на которых показаны вариант(ы) осуществления изобретения.
На фиг. 1 проиллюстрирована система управления согласно вариантам осуществления;
на фиг. 2 проиллюстрирован активный датчик согласно вариантам осуществления;
на фиг. 3-7 схематически проиллюстрированы формы волны зондовых сигналов согласно вариантам осуществления; и
на фиг. 8 представлена блок-схема способа согласно вариантам осуществления.
Осуществление изобретения
Ниже приведены варианты осуществления в качестве примера, чтобы настоящее раскрытие было подробным и полным и полностью передавало объем изобретения специалистам в данной области техники. Аналогичные позиции относятся к аналогичным элементам во всех материалах. Устройства, раскрытые в приведенных ниже вариантах осуществления, описаны в контексте работы системы.
Варианты осуществления настоящего изобретения применимы к усовершенствованию выполнения локализованного освещения в местоположении с использованием фиксированной инфраструктуры датчиков.
При периодическом планировании для датчиков, согласно Sensor Scheduling for Target Tracking in Networks of Active Sensors”, Acta Automatica Sinica, ноябрь 2006 г., авторов Xiao et al., время делят на периодические циклы, и в каждом цикле датчик воспринимает цель альтернативно в пределах заданных временных интервалов, приписанных ему. Если запланированный датчик обнаруживает цель, он будет вычислять временную разность между его текущим временем измерения и временем предыдущего временного этапа, затем объединяет его измерение с существующей оценкой цели с использованием расширенного подхода с фильтром Калмана, и перенаправляет это новое обновление оценки вместе с его временем измерения на следующий запланированный датчик.
При адаптивном планировании для датчиков, согласно «Sensor Scheduling for Target Tracking in Networks of Active Sensors», Acta Automatica Sinica, November 2006, авторов Xiao et al, следующий получающий задание датчик для следующего временного этапа планируют в соответствии с прогнозируемой точностью отслеживания, которую извлекают из следа ковариационной матрицы оценки состояния. Следовательно, предопределено, что каждый датчик знает характеристику измерения других датчиков (например, их местоположения, ориентации и функции измерения). При использовании расширенного подхода с фильтром Калмана, текущий датчик может вычислять прогнозируемую ковариационную матрицу для какого-либо другого датчика без проведения реального измерения с использованием этого датчика. Датчик с лучшей точностью отслеживания выбирают в качестве следующего получающего задание датчика. Затем текущий датчик должен направлять свое собственное время измерения и результат оценки на выбранный датчик.
Однако в «Sensor Scheduling for Target Tracking in Networks of Active Sensors», Acta Automatica Sinica, ноябрь 2006, авторов Xiao et al. не отмечено, как обнаруживать перекрестную интерференцию или как обходиться с перекрестной интерференцией после обнаружения. Варианты осуществления настоящего изобретения раскрыты с учетом модальности ультразвукового датчика, несмотря на то, что варианты осуществления аналогичным образом можно применять к другим активным датчикам, таким как радары и мультимодальные датчики. Кроме того, предполагают, что ультразвуковые матричные датчики фиксированы, например, в осветительной инфраструктуре помещения. Однако, как понятно специалистам, ультразвуковые матричные датчики могут быть отделены от осветительной инфраструктуры.
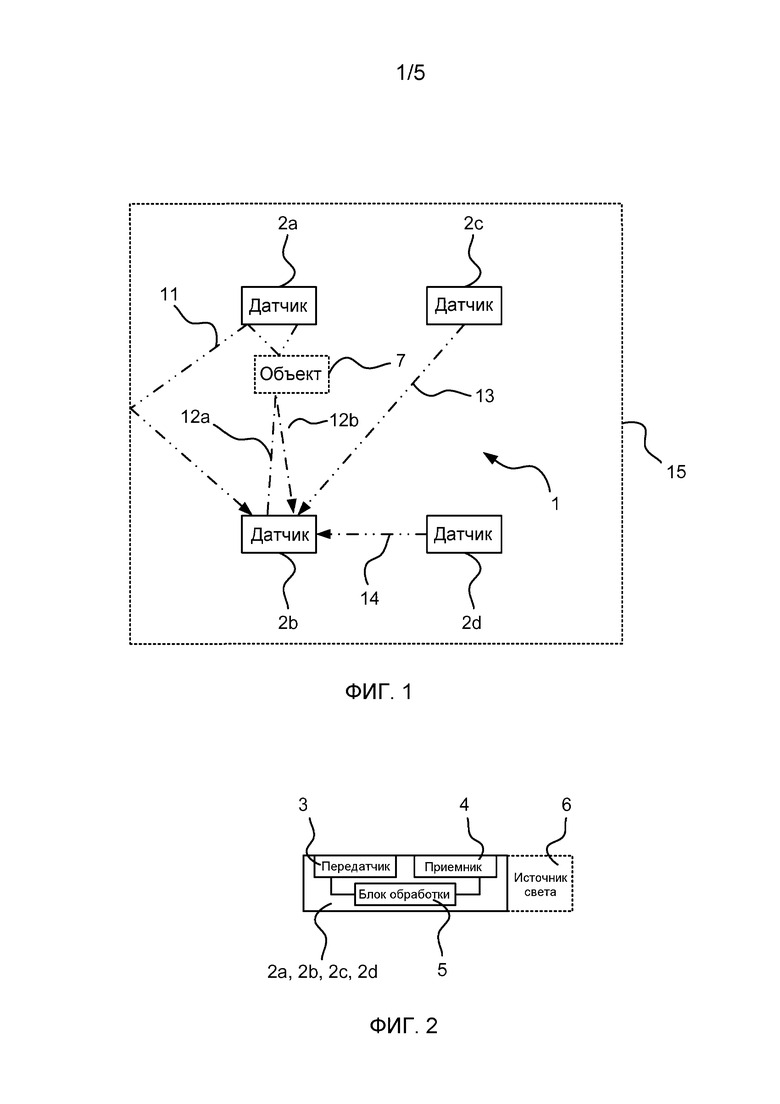
На фиг. 1 схематически проиллюстрирована система 1 управления в соответствии с настоящим изобретением. Систему 1 управления согласно схематическому примеру на фиг. 1 размещают в помещении, внутренние стены которого обозначены позицией 15. Обычно помещение представляет собой помещение в здании. Система 1 управления содержит множество активных датчиков 2a, 2b, 2c, 2d, один из которых в настоящем документе обозначен как первый активный датчик, например датчик 2a, другой из них в настоящем документе обозначен как второй активный датчик, например датчик 2b, другой из них в настоящем документе обозначен как третий активный датчик, например датчик 2c, а другой из них в настоящем документе обозначен как четвертый активных датчик, например датчик 2d. В общем система 1 управления содержит по меньшей мере два активных датчика, но в общем может содержать множество активных датчиков. Объект 7 символизирует статичный объект, присутствующий в помещении. Например, когда помещение представляет собой офис, объект 7 может представлять собой стол. Система 1 управления дополнительно может содержать по меньшей мере один источник света (не показано), другие датчики и т.д.
На фиг. 2 проиллюстрирован активный датчик 2a, 2b, 2c, 2d согласно вариантам осуществления настоящего изобретения. В общем активный датчик 2a, 2b, 2c, 2d может содержать передатчик 3, приемник 4 и блок 5 обработки. Приемник 4 предпочтительно представляет собой массив принимающих датчиков и, таким образом, предпочтительно содержит один или более элементов приемника в массиве. Активный датчик 2a, 2b, 2c, 2d дополнительно может содержать или быть функционально связан с источником 6 света. Согласно вариантам осуществления активный датчик 2a, 2b, 2c, 2d и один или более источников 6 света представляют собой часть осветительного устройства. Активные датчики 2a, 2b, 2c, 2d системы 1 управления в связи с этим могут обеспечить информацию об обнаружении присутствия распределенной осветительной системе, которая может содержать один или более источников 6 света.
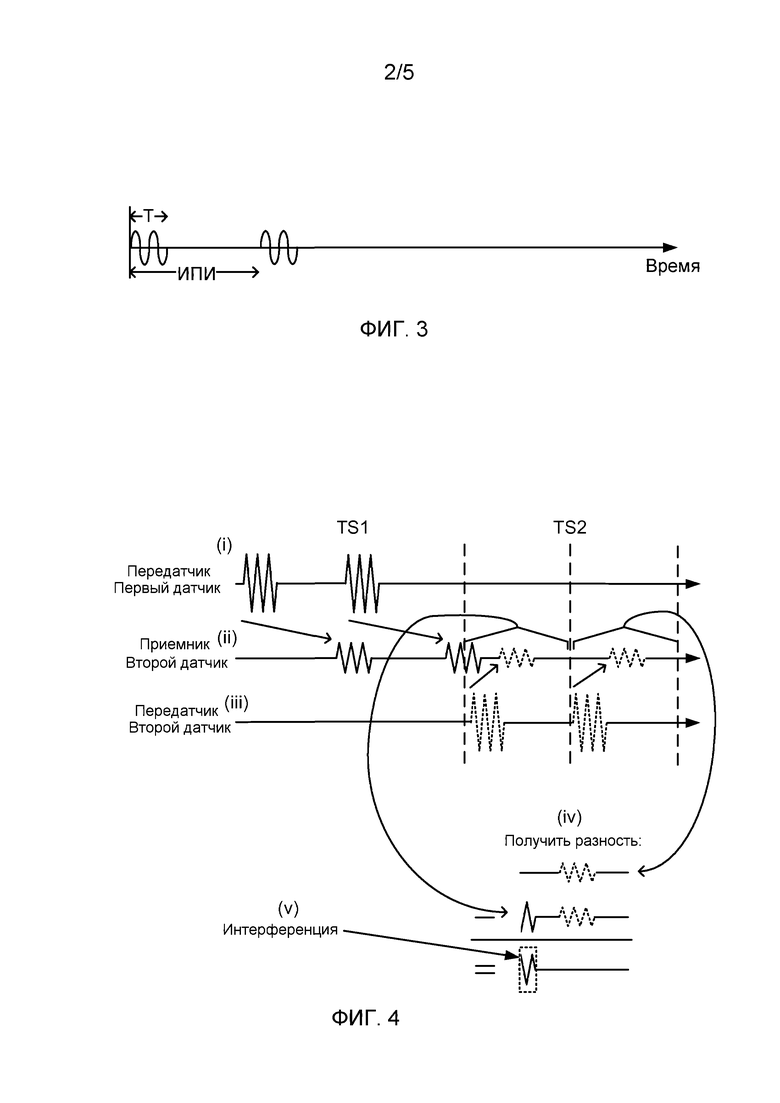
Теперь, возвращаясь к системе 1 управления, передатчик 3 каждого активного датчика 2a, 2b, 2c, 2d может быть выполнен с возможностью передачи формы волны (схематически проиллюстрированной стрелками 11, 12a, 13, 14) через область, определяемую посредством направленности передатчика 3. Следует отметить, что на фиг. 1 проиллюстрированы только сигналы, принимаемые посредством активного датчика 2b. На фиг. 3 проиллюстрирован один из примеров передаваемой формы волны в форме зондового сигнала. Параметр T определяет длину, на которой форма волны является ненулевой в каждом интервале повторения импульса (ИПИ) и которую выбирают в соответствии с необходимым пространственным разрешением. ИПИ выбирают в общем для того, чтобы вмещать наибольший ожидаемый диапазон во времени прежде, чем эхо (такое как эхо 12b) передаваемого зондового сигнала (такого как зондовый сигнал 12a) ожидают принять посредством приемника 4. Кроме того, каждому активному датчику, в настоящее время применяемому в системе 1 управления, назначают временной интервал, причем он выполнен с возможностью передачи своего зондового сигнала. Такие временные интервалы дополнительно раскрыты ниже со ссылками на фиг. 4-7.
Зондовые сигналы 11, 12a, 13, 14 (и какое-либо их эхо 12b) принимают посредством приемника 4 активного датчика 2a, 2b, 2c, 2d. На стороне приемника принимаемые сигналы затем обрабатывают, например, для того, чтобы извлекать воспринимаемую информацию, связанную с присутствием. Каждый активный датчик в настоящее время, применяемый в системе 1 управления, назначают временному интервалу, причем он выполнен с возможностью приема эхо его зондового сигнала. Предпочтительно назначенный временной интервал для передачи его собственного зондового сигнала и назначенный временной интервал для приема его эхо представляет собой один и тот же временной интервал. Предпочтительно для каждого активного датчика, в настоящее время применяемого в системе 1 управления, назначают уникальный временной интервал. Предпочтительно временные интервалы являются смежными и неперекрывающимися.
Рассмотрим сценарий с четырьмя активными датчиками 2a-d, распределенными в помещении, как в системе 1 управления на фиг. 1. Во время фазы конфигурирования (или когда помещение не занято), временные интервалы могут быть случайно повторно назначены для нескольких случаев. В одном случае активный датчик 2a (первый активный датчик) и активный датчик 2b (второй активный датчик) назначают временным интервалам TS1 и TS2, соответственно. Каждый активный датчик выполнен с возможностью передачи в назначенном ему временном интервале двух последовательных импульсов и прослушивания их эхо. В частности, передатчик 3 первого активного датчика 2a, на этапе S02 как в (i) на фиг. 4, выполнен с возможностью передачи в первом временном интервале TS1 первого зондового сигнала 11, как представлено посредством формы волны, проиллюстрированной на фиг. 3, через область, определяемую посредством направленности (т.е. поля обзора) передатчика 3 первого активного датчика 2a. Первый зондовый сигнал 11 содержит два ненулевых импульса, передаваемых в соответствующих частях первого временного интервала TS1. Первый зондовый сигнал 11 в (ii) на фиг. 4 принимают посредством приемника 4 второго активного датчика 2b, этап S04a. Передатчик 3 второго активного датчика 2b на этапе S06 как в (iii) на фиг. 4 может быть выполнен с возможностью передачи во втором временном интервале TS2 второго зондового сигнала 12a, как представлено посредством формы волны, проиллюстрированной на фиг. 3, через область, определяемую посредством направленности (т.е. поля обзора) передатчика 3 второго активного датчика 2b. Второй зондовый сигнал 12a содержит два ненулевых импульса, передаваемых в соответствующих частях второго временного интервала TS2. Эхо 12b второго зондового сигнала 12a в (ii) на фиг. 4 принимают посредством приемника 4 второго активного датчика 2b, этап S04b. Блок 5 обработки второго активного датчика 2b на этапе S08 как в (iv) на фиг. 4 во втором временном интервале TS2 определяет разность между сигналами, принимаемыми в первой части второго временного интервала, и сигналами, принимаемыми во второй части второго временного интервала TS2. Разностный сигнал в связи с этим получают посредством определения разности эхо сигналов, соответствующих двум ИПИ. Вычитание может включать временной сдвиг и/или масштабирование сигналов в двух ИПИ. Предпочтительно первая часть соответствует первой половине второго временного интервала TS2, а вторая часть соответствует второй половине второго временного интервала TS2.
Статичный объект ведет к соответствующему (почти) нулевому разностному компоненту сигнала за связанное время прохождения, тогда как движущийся объект ведет к ненулевому компоненту сигнала за связанное время прохождения. Мощность в разностном сигнале в различные интервалы времени прохождения, таким образом, можно использовать для того, чтобы посредством второго зондового сигнала 12a и его эхо 12b обнаруживать присутствие человека в помещении 15. Эхо от статичных объектов (например, объекта 7) в общем ведут к одному и тому же вкладу в принимаемые сигналы и, таким образом, компенсируются. Это только касается случая с последовательными импульсами, передаваемыми посредством одного и того же активного датчика в один и тот же временной интервал; однако если эхо происходит из передаваемого сигнала в предыдущем временном интервале (который, таким образом, назначают соседнему активному датчику), будет иметь место нечетное число принимаемых сигналов (или их пар) (включая эхо) в одном временном интервале, когда получают разность в (iv) на фиг. 4, и, таким образом, не все принимаемые сигналы будут компенсированы, как в (v) на фиг. 4. Блок 5 обработки в связи с этим выполнен с возможностью обнаружения интерференции. Интерференцию можно обнаруживать, когда разность имеет абсолютное значение, которое больше, чем заданное пороговое значение. Блок 5 обработки также может осуществлять корреляцию для того, чтобы обнаруживать интерференцию. Затем форма волны первого зондового сигнала 11 предпочтительно может не быть коррелирована с формой волны второго зондового сигнала 12a (и его эхо 12b).
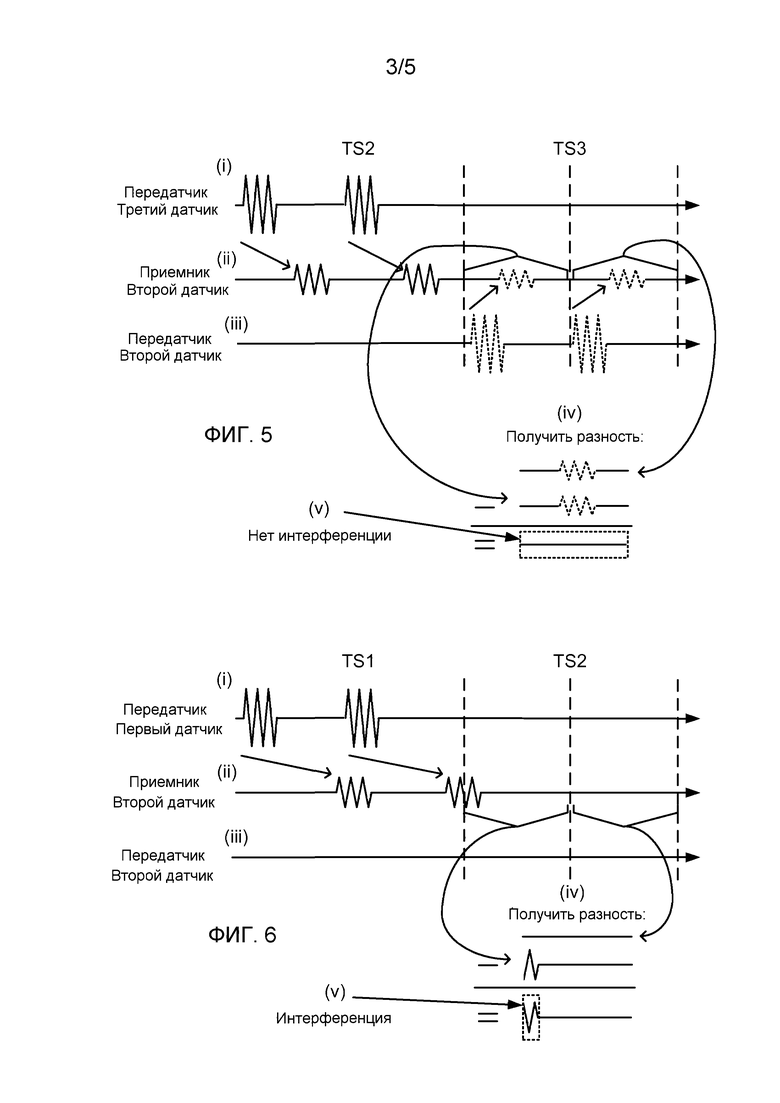
В следующем случае, как на фиг. 5, второму активному датчику 2b и третьему активному датчику 2c назначают временные интервалы TS3 и TS2, соответственно. В этом случае (см. фиг. 1), объект не присутствует между вторым активным датчиком 2b и третьим активным датчиком 2c, так что не принимают дополнительную интерференцию, происходящую от третьего активного датчика 2c, со вторым активным датчиком 2b, как проиллюстрировано на фиг. 5. В (i) третий активный датчик 2c во временном интервале TS2 передает третий зондовый сигнал 13. В (ii), во временном интервале TS2 второй активный датчик 2b принимает третий зондовый сигнал 13. В (iii) во временном интервале TS3 второй активный датчик 2b передает второй зондовый сигнал 12a. В (ii) во временном интервале TS3 второй активный датчик 2b принимает эхо 12b второго зондового сигнала 12a. Посредством определения, блок 4 обработки в связи с этим выполнен с возможностью исключения двух ненулевых импульсов второго зондового сигнала посредством вычитания ненулевого импульса, принимаемого в первой части во временном интервале TS3, из ненулевого импульса, принимаемого во второй части во временном интервале TS3 (или наоборот). Таким образом, после определения разности в (iv) интерференцию не обнаруживают в (v).
На фиг. 4 для назначения заданного временного интервала в (v) сильную интерференцию наблюдают в первой части временного интервала TS2, тогда как в (v) на фиг. 5 интерференцию не наблюдают в той же части временного интервала TS2. Таким образом, определяют присутствие объекта между первым активным датчиком 2a и вторым активным датчиком 2b, который вызывает интерференцию. Таким образом, имеет место более сильная перекрестная интерференция от второго активного датчика 2b на первый активный датчик 2a. Используя эту информацию, активные датчики могут отбрасывать те части (диапазоны) временного интервала TS2, где обнаружена интерференция, задавать более высокое пороговое значение для обнаружения эхо (т.е. увеличение заданного порогового значения) или могут быть повторно назначены (таким образом повторно назначены) временным интервалам с минимальной интерференцией от других активных датчиков.
Согласно другому варианту осуществления вместо использования случайного повторного назначения временных интервалов один или более активных датчиков, скажем, второй активный датчик 2b, могут проскакивать время от времени передачу зондового сигнала в назначенном им интервале, например временном интервале TS2, как показано на фиг. 6. В (i), во временном интервале TS1 первый активный датчик 2a передает первый зондовый сигнал 11. В (ii), во временном интервале TS1 второй активный датчик 2b принимает первый зондовый сигнал 11 (его части). В (iii), во временном интервале TS2 второй активный датчик 2b не передает какой-либо зондовый сигнал (т.е. второй активный датчик 2b молчит в назначенном ему временном интервале TS2). С учетом того, что передача во временном интервале TS2 отсутствует, эхо не должно быть принято в (ii) во временном интервале TS2 и, таким образом, разность, получаемая посредством блока 5 обработки, для второго активного датчика 2b в (iv) должна составлять ноль. Какое-либо эхо, принимаемое во время временного интервала TS2, таким образом, будет брать начало от соседнего активного датчика, т.е. первого активного датчика 2a, и, таким образом, будет определено посредством блока 5 обработки второго активного датчика 2b в (v) в качестве интерференции. Это знание об интерференции можно использовать схожим образом, как соответствует предыдущему варианту осуществления, чтобы усовершенствовать систему 1 управления. Активные датчики 2a, 2b, таким образом, могут отбрасывать те части (диапазоны) временного интервала TS2, где обнаружена интерференция, задавать более высокое пороговое значение для обнаружения эхо (т.е. увеличивать заданное пороговое значение) или повторно назначать (таким образом, повторно назначать) временным интервалам с минимальной интерференцией от других активных датчиков.
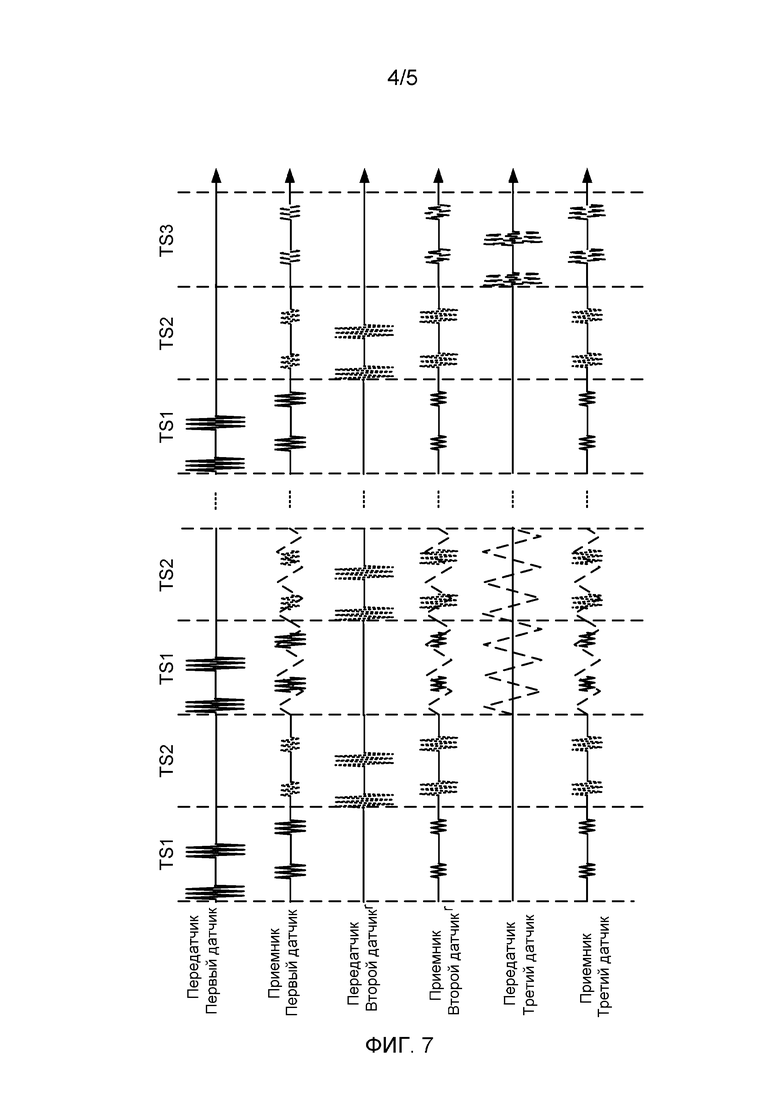
Далее предположим, что система 1 управления содержит активные датчики 2a и 2b (т.е. первый и второй активные датчики). Согласно одному из вариантов осуществления, когда новый активный датчик (скажем, активный датчик 2c (третий активный датчик)) добавляют в систему 1 управления, уже содержащую активные датчики 2a и 2b, и новый активный датчик 2c обнаруживает, что все временные интервалы заняты, но может передавать извещающий сигнал, например зондовый сигнал на частоте, отличной от описанных выше первого и второго зондовых сигналов, или сильный непрерывный синусоидальный сигнал в течение нескольких циклов, которые могут представлять собой один или более целых временных интервалов, чтобы сигнализировать активным датчикам 2a, 2b в настоящее время в системе 1 управления, что должен быть вставлен дополнительный временной интервал и также, таким образом, что назначенные в настоящее время временные интервалы должны быть назначены повторно. Этот процесс проиллюстрирован на фиг. 7. В частности, как на фиг. 7, изначально первому активному датчику 2a назначают временной интервал TS1, а второму активному датчику 2b назначают временной интервал TS2. Таким образом, изначально во временном интервале TS1 первый активный датчик 2a передает его первый зондовый сигнал 11, который принимают посредством второго активного датчика 2b и нового активного датчика 2c, и эхо первого зондового сигнала принимают посредством первого активного датчика 2a. Кроме того, изначально во временном интервале TS2 второй активный датчик 2b передает его второй зондовый сигнал 12a, который принимают посредством первого активного датчика 2a и нового активного датчика 2c, и эхо 12b второго зондового сигнала принимают посредством второго активного датчика 2b. При втором появлении временного интервала TS1 (и/или временного интервала TS2) новый активный датчик 2c, на этапе S10, передает извещающий сигнал, относящийся к добавлению третьего активного датчика 2c в систему 1 управления.
Таким образом, в дополнение к приему первого зондового сигнала первого активного датчика 2a также принимают извещающий сигнал нового активного датчика 2c, на этапе S12, во временном интервале TS1 (и/или в дополнение к приему второго зондового сигнала второго активного датчика 2b также извещающий сигнал нового активного датчика 2c принимают во временном интервале TS2). Активные датчики 2a, 2b в настоящее время в системе 1 управления, таким образом, будут обнаруживать извещающий сигнал в виде интерференции во всех временных интервалах (как раскрыто выше со ссылками на фиг. 4-6) и, таким образом, будут понимать, что новый активный датчик 2c находится в процессе добавления в систему 1 управления и, таким образом, что требуется новый временной интервал. Затем добавляют новый временной интервал TS3, а временные интервалы TS1, TS2, TS3 повторно назначают активному датчику 2a, 2b, 2c в системе 1 управления. В частности, как на фиг. 7, после введения временного интервала TS3, первому активному датчику 2a назначают временной интервал TS1, второму активному датчику 2b назначают временной интервал TS2, и вновь добавленному третьему активному датчику 2c назначают временной интервал TS3. Таким образом, во временном интервале TS3 третий активный датчик 2c передает свой зондовый сигнал, который принимают посредством первого активного датчика 2a и второго активного датчика 2b, и эхо зондового сигнала принимают посредством третьего активного датчика 2c. Другие назначения временных интервалов TS1, TS2, TS3 возможны в равной мере.
Обычно упомянутые выше зондовые сигналы и извещающий сигнал имеют несущую частоту приблизительно 30-50 кГц, предпочтительно 25-45 кГц, даже более предпочтительно 40 кГц и полосу пропускания приблизительно 1-5 кГц, предпочтительно 1-3 кГц, даже более предпочтительно 2 кГц. В качестве примера можно использовать стандартный коммерческий передатчик с несущей частотой 40 кГц, имеющий типичную полосу пропускания 2 кГц.
В заключение раскрыта сеть активных датчиков в системе управления. Применения представляют собой, например, активные датчики присутствия в применении к управлению освещением. Активные датчики, которые могут представлять собой датчики фиксированной инфраструктуры, обеспечивают информацию об обнаружении присутствия распределенной осветительной системе. Активные датчики общаются посредством передачи зондовых сигналов. Передача зондовых сигналов может вести к перекрестной интерференции, которая может варьировать во времени. Перекрестную интерференцию обнаруживают, и в дальнейшем ее можно избегать, посредством определения разности между сигналами, принимаемыми в первой части временного интервала, и сигналами, принимаемыми во второй части временного интервала. Для того чтобы выполнять это, зондовые сигналы, содержащие два ненулевых импульса, передают в соответствующих частях временного интервала. В общем число ненулевых импульсов в каждом зондовом сигнале может быть не ограничено двумя. Предпочтительно число ненулевых импульсов в каждом зондовом сигнале соответствует числу частей, на которое каждый временной интервал делят в целях обнаружения интерференции. Предпочтительно каждый временной интервал делят на четное число частей, и, таким образом, предпочтительно число ненулевых импульсов в каждом зондовом сигнале также является четным.
Специалисту в данной области техники будет понятно, что настоящее изобретение никаким образом не ограничено предпочтительными вариантами осуществления, описанными выше. Напротив, многие модификации и вариации возможны в пределах объема приложенной формулы изобретения. Например, раскрытые варианты осуществления можно использовать с достижением преимущества для улучшения эксплуатационных характеристик и облегчения управления обнаружением присутствия для различных условий для помещений и вне помещений.
Изобретение относится к сети активных датчиков в системе управления. Технический результат – избежание интерференции между датчиками. Для этого активные датчики, которые могут представлять собой датчики фиксированной инфраструктуры, обеспечивают информацию об обнаружении присутствия распределенной осветительной системе. Активные датчики осуществляют связь посредством передачи зондовых сигналов. Передача зондовых сигналов может вести к перекрестной интерференции, которая может варьировать во времени. Перекрестную интерференцию обнаруживают, и ее впоследствии можно избегать, посредством определения разности между сигналами, принимаемыми в первой части временного интервала, и сигналами, принимаемыми во второй части временного интервала. Для этого зондовые сигналы, содержащие два ненулевых импульса, передают в соответствующих частях временного интервала. Применения представляют собой, например, активные датчики присутствия, применяемые в управлении освещением в условиях помещения, а также вне помещения. 2 н. и 13 з.п. ф-лы, 8 ил.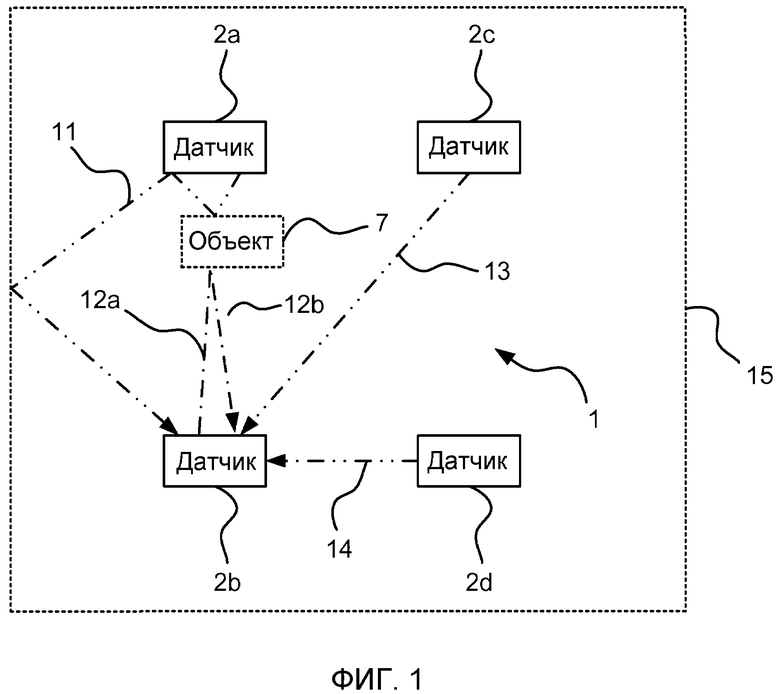
1. Система (1) управления, содержащая
первый активный датчик (2а), содержащий
передатчик (3), выполненный с возможностью передачи в первом временном интервале первого зондового сигнала (11), содержащего два ненулевых импульса, передаваемых в соответствующих частях упомянутого первого временного интервала; и
второй активный датчик (2b), содержащий
массив принимающих датчиков, выполненный с возможностью приема упомянутого первого зондового сигнала; и
блок (5) обработки, выполненный с возможностью определения во втором временном интервале разности между сигналами, принимаемыми в первой части упомянутого второго временного интервала, и сигналами, принимаемыми во второй части упомянутого второго временного интервала, причем блок обработки выполнен с возможностью обнаружения перекрестной интерференции между активными датчиками (2а, 2b), причем перекрестную интерференцию обнаруживают, если мощность в разностном сигнале имеет абсолютное значение более заданного порогового значения.
2. Система управления по п. 1, в которой второй активный датчик дополнительно содержит
передатчик (3), выполненный с возможностью передачи в упомянутом втором временном интервале второго зондового сигнала (12а), содержащего два ненулевых импульса, передаваемых в соответствующих частях упомянутого второго временного интервала, причем
упомянутый массив принимающих датчиков дополнительно выполнен с возможностью приема эхо (12b) упомянутого второго зондового сигнала, и при этом
упомянутый блок обработки посредством определения упомянутой разности выполнен с возможностью исключения упомянутых двух ненулевых импульсов упомянутого второго зондового сигнала.
3. Система управления по п. 1 или 2, в которой одна из упомянутых соответствующих частей соответствует первой половине и в которой другая из упомянутых соответствующих частей соответствует второй половине.
4. Система управления по п. 1, в которой интерференцию обнаруживают посредством того, что упомянутая разность имеет абсолютное значение больше заданного порогового значения.
5. Система управления по п. 4, в которой упомянутый блок обработки дополнительно выполнен с возможностью увеличения упомянутого заданного порогового значения в ответ на обнаружение интерференции.
6. Система управления по п. 1, в которой упомянутый блок обработки дополнительно выполнен с возможностью отбрасывания диапазонов в упомянутом втором временном интервале, в которых обнаружена интерференция.
7. Система управления по любому из предыдущих пунктов, в которой упомянутый первый временной интервал и упомянутый второй временной интервал повторно назначают в ответ на обнаружение интерференции.
8. Система управления по п. 1, в которой второй активный датчик дополнительно содержит
передатчик (3), выполненный с возможностью передачи в упомянутом втором временном интервале и в ответ на прием упомянутым массивом принимающих датчиков упомянутого первого зондового сигнала оповещающего сигнала, относящегося к добавлению упомянутого второго активного датчика в систему управления, и при этом
первый активный датчик дополнительно содержит
массив принимающих датчиков, выполненный с возможностью приема упомянутого оповещающего сигнала.
9. Система управления по п. 8, в которой упомянутый оповещающий сигнал представляет собой непрерывный синусоидальный, передаваемый во всем упомянутом втором временном интервале.
10. Система управления по п. 8 или 9, в которой частотный состав упомянутого оповещающего сигнала отличается от частотного состава упомянутого первого зондового сигнала.
11. Система управления по п. 1, в которой упомянутый массив принимающих датчиков выполнен с возможностью осуществления корреляции для обнаружения интерференции.
12. Система управления по п. 2, в которой упомянутый первый активный датчик и упомянутый второй активный датчик представляют собой или датчики на ультразвуковой основе, или датчики на основе радара.
13. Способ обнаружения интерференции в системе управления (1), содержащий этапы, на которых:
передают (S02) посредством первого активного датчика (2а) в первом временном интервале первый зондовый сигнал (11), содержащий два ненулевых импульса, передаваемых в соответствующих частях упомянутого первого временного интервала;
принимают (S04a) посредством второго активного датчика (2b) упомянутый первый зондовый сигнал; и
определяют (S06) посредством упомянутого второго активного датчика во втором временном интервале разность между сигналами, принимаемыми в первой части упомянутого второго временного интервала, и сигналами, принимаемыми во второй части упомянутого второго временного интервала, причем второй активный датчик выполнен с возможностью обнаружения перекрестной интерференции между активными датчиками (2а, 2b), причем перекрестную интерференцию обнаруживают, если мощность в разностном сигнале имеет абсолютное значение более заданного порогового значения.
14. Способ по п. 13, дополнительно содержащий этапы, на которых:
передают (S08) посредством упомянутого второго активного датчика в упомянутом втором временном интервале второй зондовый сигнал (12а), содержащий два ненулевых импульса, передаваемых в соответствующих частях упомянутого второго временного интервала;
принимают (S04b) посредством упомянутого второго активного датчика эхо (12b) упомянутого второго зондового сигнала, при этом упомянутый второй активный датчик посредством определения упомянутой разности выполнен с возможностью исключения упомянутых двух ненулевых импульсов упомянутого второго зондового сигнала.
15. Способ по п. 13, дополнительно содержащий этапы, на которых:
передают (S10) посредством упомянутого второго активного датчика в упомянутом втором временном интервале и в ответ на прием упомянутым приемником упомянутого первого зондового сигнала оповещающий сигнал, относящийся к добавлению упомянутого второго активного датчика в систему управления, и при этом
принимают (S12) посредством упомянутого первого активного датчика упомянутый оповещающий сигнал.
| СПОСОБ РАЗВЕРТЫВАНИЯ СЕНСОРНОЙ СЕТИ И САМОКОНФИГУРИРУЕМАЯ СЕНСОРНАЯ СЕТЬ | 2010 |
|
RU2439812C1 |
| СПОСОБ КОНТРОЛЯ И ОЦЕНКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ МНОГОПАРАМЕТРИЧЕСКОГО ОБЪЕКТА ДИАГНОСТИКИ ПО ДАННЫМ ИЗМЕРИТЕЛЬНОЙ ИНФОРМАЦИИ | 1999 |
|
RU2145735C1 |
| СХЕМА ДЛЯ ИЗМЕРЕНИЯ СИГНАЛА | 2000 |
|
RU2276329C2 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |

