ОБЛАСТЬ К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение главным образом относится к области систем управления, и в особенности, к системе управления, содержащей первый активный датчик и второй активный датчик и способам, соответствующим им.
УРОВЕНЬ ТЕХНИКИ
Освещение офиса составляет почти 30% электрического потребления в зданиях. Так как затраты и энергетическая эффективность источников света на светодиодах (также LED) улучшаются, они становятся жизнеспособными альтернативами для люминесцентных ламп, также предлагая преимущество регулирования цвета. Общепризнано, что стратегии управления светом, основанные на информации присутствия жителя, очень эффективны при сокращении потребления энергии. Например, в незанятых областях свет может быть тусклым или погашенным. Следовательно, структура экологического строительства может извлечь выгоду из адаптивных к присутствию систем управления светом.
Известно, что активные датчики, такие как датчики, основанные на ультразвуке, обеспечивают лучшее обнаружение, чем пассивные инфракрасные датчики в больших объемных пространствах. Также известно, что активные датчики более чувствительны, чем пассивные инфракрасные датчики, как правило. Ультразвуковой матричный датчик был описан в WO2005/069698 для надежного обнаружения присутствия, который, будучи соединенным с системой управления освещением, обеспечивает надежное исполнение освещения.
В соответствии с WO2005/069698, источник света освещает локальную область светом, который модулируется для идентификации локальной области. В ответ на обнаружение модулированного светового сигнала носимый детектор пребывания, расположенный в локальной области, испускает сигнал, идентифицирующий локальную область. Упомянутый испущенный сигнал принимается блоком управления, который находится в связи с источником света и способен к управлению функцией освещения источника света. Детектор пребывания в соответствии с WO2005/069698 не зависит от движения.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Чтобы достигнуть расширенных функций управления, подобных воспроизведению локализованного освещения, в котором эффекты освещения локализованы вокруг обитателей локальной области, информация относительно местоположений обитателя, предпочтительно является желательной. Однако, изобретатели приложенных вариантов осуществления идентифицировали некоторое количество неудобств, связанных с вышеупомянутыми отмеченными понятиями. В частности, было установлено, что осуществление полностью автоматических эффектов воспроизведения освещения от световых систем может не всегда быть желательным из-за персональных предпочтений обитателей. Например, пользователи (то есть обитатели) могут иметь тенденцию к предпочтению разрешать или запрещать эффекты освещения на основании деятельности, в которую они вовлечены, или по другим причинам.
Задачей настоящего изобретения является преодоление этих проблем, и обеспечение системы управления, содержащей множество активных датчиков, которые скомпонованы таким образом, что воспринимающая инфраструктура может иметь способность к предложению масштабируемости в функциональных возможностях. Задачей настоящего изобретения является обеспечение системы управления, которая содержит портативные датчики, которые в комбинации с матричным датчиком с фиксированной инфраструктурой могут разрешить увеличенную, более богатую функцию восприятия. Согласно первому аспекту изобретения вышеупомянутые и другие цели достигнуты системой управления, содержащей первый активный датчик, содержащий передатчик, скомпонованный, чтобы передавать первый зондовый сигнал; и второй активный датчик, содержащий передатчик, скомпонованный, чтобы передавать второй зондовый сигнал, и матрицу датчиков приемника, скомпонованную, чтобы принять первый зондовый сигнал, и эхо (эхо-сигнал) второго зондового сигнала; при этом первый зондовый сигнал, возможно, отличается от второго зондового сигнала таким образом, что избегают помех в принимающей матрице датчиков между первым зондовым сигналом и вторым зондовым сигналом.
Раскрытая система таким образом может предпочтительно быть использована в ситуациях, в которых пользователи применяют устройства, содержащие первый активный датчик, для содействия фиксированной инфраструктуре, содержащей второй активный датчик, для определения местоположения пользователя.
Предпочтительно раскрытому первому активному датчику нужно быть только способным к передаче сигнала (и следовательно не для приема каких-либо сигналов). Упомянутый раскрытый первый активный датчик не должен даже быть синхронизирован с фиксированной инфраструктурой. Так как сигнал локального устройства отличен от фиксированной инфраструктуры, как представлено вторым активным датчиком.
Согласно варианту осуществления упомянутая система управления также содержит источник света и блок обработки, при этом упомянутый блок обработки скомпонован для прогнозной оценки местоположения первого активного датчика на основании принятого первого зондового сигнала, и для управления функцией освещения источника света в соответствии с этой прогнозной оценкой местоположения первого активного датчика. Предпочтительно, что таким образом система управления делает возможным улучшение функциональных возможностей управления освещением.
На основании разности фаз, измеренной между множественными элементами матрицы датчиков приемника, первый активный датчик может быть локализован (определено его местоположение) посредством использования алгоритма направления прибытия. Первый зондовый сигнал, исходящий из первого активного датчика, может быть обнаружен посредством корреляции. Предпочтительно, сигнал, переданный локальным устройством, является внутриполосным сигналом. Это не требует адаптации со стороны матрицы датчиков приемника. Альтернативно, сигнал может быть передан внеполосно. Это может обеспечить более дешевый передатчик первого активного датчика. Хотя внеполосная передача может потребовать широкополосную матрицу датчика приемника во втором датчике, одно преимущество внеполосной подачи сигнала заключается в избежание помех с сигналом, посланным от второго активного датчика.
Согласно варианту осуществления первый активный датчик также содержит приемник. Первый зондовый сигнал затем предпочтительно передается в ответ на прием второго зондового сигнала приемником. Таким образом, система управления может быть синхронизирована. Преимущественно, элемент приемника в первом датчике обеспечивает лучшую точность в определении местоположения. Если первый датчик не имеет элемента приемника, оценка местоположения обитателя может только быть получена на основании угловой информации.
Согласно варианту осуществления, упомянутый первый активный датчик содержит матрицу элементов приемника. Таким образом, может быть достигнута улучшенное определение местоположения первого активного датчика. Синхронизация предпочтительно выполняется относительно сигнала, прибывающего из заранее заданного угла, то есть соответствующего второму датчику.
Согласно второму аспекту изобретения, цель достигается способом в системе управления, содержащей первый активный датчик, и второй активный датчик, содержащим передачу посредством передатчика первого активного датчика первого зондового сигнала; передачу посредством передатчика второго активного датчика второго зондового сигнала; и прием посредством матрицы датчиков приемника второго активного датчика, первого зондового сигнала и эхо-сигнала второго зондового сигнала; при этом первый зондовый сигнал отличается от второго зондового сигнала таким образом, что помехи в матрице датчиков приемника между первым зондовым сигналом и вторым зондовым сигналом избегаются.
Следует отметить, что изобретение относится ко всем возможным комбинациям признаков, перечисленных в формуле изобретения. Аналогично, упомянутые преимущества первого аспекта применяются и ко второму аспекту, и наоборот.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Вышеупомянутые и другие аспекты настоящего изобретения будут ниже описаны более подробно со ссылками на приложенные чертежи, показывающие варианты осуществления изобретения.
Фиг. 1 изображает систему управления согласно вариантам осуществления;
Фиг. 2-7 схематично изображают формы волн (колебательные сигналы) зондовых сигналов согласно вариантам осуществления; и
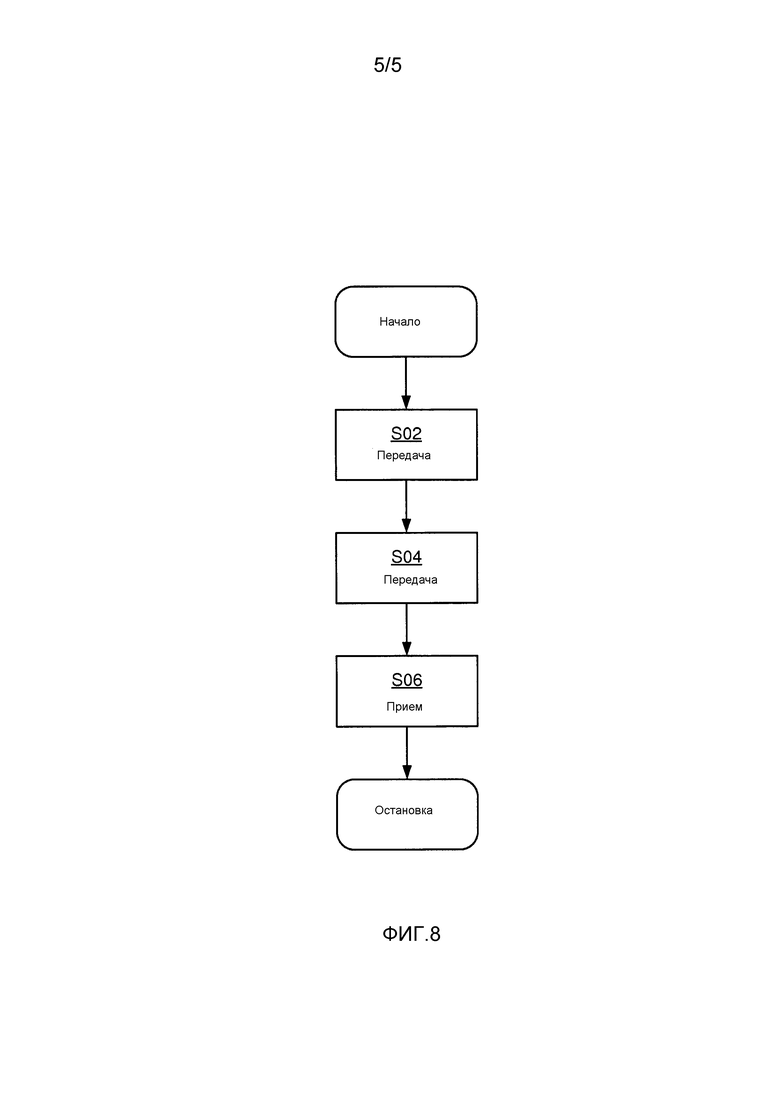
Фиг. 8 является блок-схемой способа согласно вариантам осуществления.
ПОДРОБНОЕ ОПИСАНИЕ
Нижеперечисленные варианты осуществления предоставлены посредством примера так, чтобы это раскрытие (описание) было подробным и полным и полностью передавало объем изобретения для специалистов в данной области техники. Аналогичные номера относятся к аналогичным элементам по всему описанию. Упомянутые устройства, раскрытые в нижеперечисленных вариантах осуществления, будут описаны в контексте работы системы.
Варианты осуществления настоящего изобретения могут быть применены для усовершенствования локализованного предоставления света в местоположении с фиксированной инфраструктурой датчиков. В этом смысле предоставляются портативные устройства датчика (один из которых ниже упоминается как первый активный датчик), которые предлагают улучшенное обнаружение локального присутствия, и оно является дополнительным компонентом к существующей инфраструктуре.
Международная заявка на патент WO2005/069698 описывает носимый детектор пребывания, который основан на использовании уникально модулированного сигнала (например, радиочастотного (RF), инфракрасного (IR) или видимого света, который используется для указания присутствия в некоторых локальных областях так, чтобы некоторые локальные области могли быть освещены должным образом. Это вероятно требует не только использования носимого детектора пребывания, но также и блока приема в контроллере света, который делает возможным различие между потенциально множественными детекторами присутствия, и также идентифицировать их. В частности, в соответствии с WO2005/069698, источник света освещает локальную область светом, который модулируется, чтобы идентифицировать локальную область. В ответ на обнаружение модулированного света носимый детектор пребывания, расположенный в локальной области, излучает сигнал, идентифицирующий локальную область. Таким образом, носимые детекторы являются реактивными, то есть они передают только после приема сигнала от источников света.
В отличие от WO2005/069698 варианты осуществления настоящего изобретения основаны на том, что система уже содержит инфраструктурный ультразвуковой матричный датчик, который выполняет функцию обнаружения присутствия. Согласно настоящему изобретению существует раскрытая портативная система датчика, которая может сосуществовать с датчиком инфраструктуры, таким образом реализуя новые функциональные возможности управления. Портативная система датчика независима от датчика инфраструктуры в том смысле, что она не активизируется или никак иначе не управляется датчиком инфраструктуры, как в случае WO2005/069698.
Варианты осуществления настоящего изобретения будут раскрыты относительно ультразвуковой модальности датчика, хотя варианты осуществления могут аналогично быть применены к другим активным датчикам, таких как радары. Также предполагается, что ультразвуковой матричный датчик (на который есть ссылка ниже, как на второй активный датчик) фиксируется в инфраструктуре освещения комнаты. Однако, специалисты в области техники понимают, что упомянутый ультразвуковой матричный датчик может быть отделен от инфраструктуры освещения.
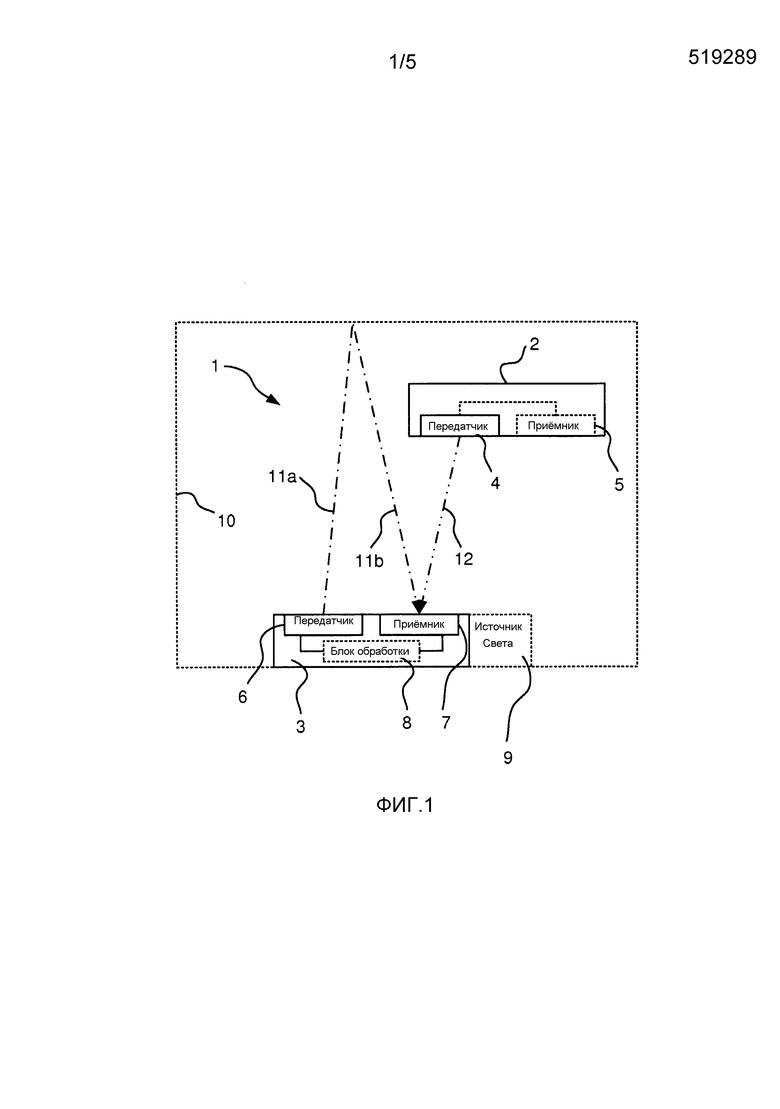
Фиг. 1 схематично изображает систему 1 управления согласно настоящему изобретению. Система 1 управления согласно схематическому примеру на Фиг. 1 помещена в комнату 10. Типично, комната 10 является комнатой здания. Система 1 управления содержит первый активный датчик 2 и второй активный датчик 3. Первый активный датчик 2 является предпочтительно портативным датчиком. Второй активный датчик 3 является предпочтительно фиксированным датчиком инфраструктуры. Первый активный датчик 2 содержит передатчик 4 и, необязательно, приемник 5. Второй активный датчик 3 содержит передатчик 6, приемник 7 и, необязательно, блок 8 обработки. Система 1 управления может также содержать по меньшей мере один источник 9 света. Согласно вариантам осуществления второй активный датчик 3 и по меньшей мере один из этого по меньшей мере одного источника 9 света является частью одного и того же устройства, например, светильника. Таким образом, источник 9 света, можно сказать, содержит второй активный датчик 3.
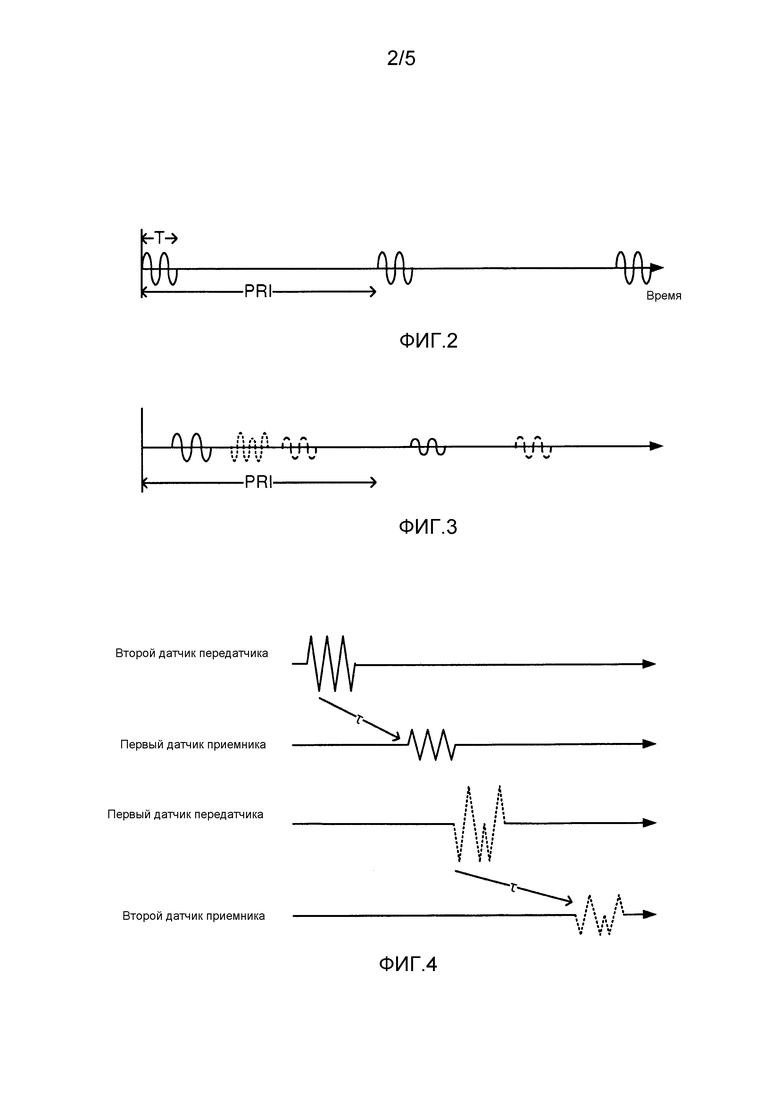
Передатчик 6 второго активного датчика 3, на этапе S04, скомпонован, чтобы передавать второй зондовый сигнал 11a, как представлено посредством формы волны (колебательного сигнала), изображенной на Фиг. 2, по области, определяемой директивностью передатчика 6. Параметр T определяет длину, по которой форма волны является ненулевой в каждом периоде повторения импульса (PRI) и выбирается согласно требуемому пространственному разрешению. PRI выбирают, чтобы приспособить наибольший ожидаемый диапазон во времени прежде, чем эхо-сигнал 11b переданного второго зондового сигнала 11a, как ожидается, будет принят приемником 7.
Приемник 7 из второго активного датчика 3 является, предпочтительно, матрицей датчиков приемника и таким образом предпочтительно содержит один или более элементов приемника в матрице. В приемнике 7 принятые сигналы обрабатывают по порядку, чтобы определить информацию восприятия присутствия. Предположим сначала, что эхо-сигнал 11b второго зондового сигнала 11a принят приемником 7, этап S06. Как будет также раскрыто ниже в соответствии с Фиг. 5 и 6, сначала разность сигналов получают посредством взятия разностей эхо-сигналов, соответствующих двум PRI. Статический объект приводит к соответствующему (почти) нулевому компоненту сигнала разности при соответствующем времени прохождения, при этом движущийся объект приводит к ненулевому компоненту сигнала при соответствующем времени прохождения. Мощность в сигнале разности в различных окнах времени прохождения может, таким образом, быть использована посредством второго зондового сигнала 11a и его эхо-сигнала 11b для обнаружения человеческого присутствия в комнате 10. Предположим теперь, что первый активный датчик 2 добавлен в комнату 10. Передатчик 4 первого активного датчика 2 скомпонован, чтобы передавать первый зондовый сигнал 12, этап S02. Предпочтительно первый активный датчик 2 носится пользователем. Когда пользователь первого активного датчика 2 желает локализованное освещение, передатчик 4 первого активного датчика 2 активизируется, например, посредством приема пользовательского ввода от пользователя, для передачи первого зондового сигнала 12. Первый зондовый сигнал 12 принимается приемником 7 второго активного датчика 3, этап S06. Форма волны первого зондового сигнала 12 предпочтительно отличается от формы волны второго зондового сигнала 11a таким образом, что помехи в принимающей матрице датчика между первым зондовым сигналом 11 и вторым зондовым сигналом 12a избегаются, или, по меньшей мере, минимизируются. Это будет также раскрыто ниже со ссылками на Фиг. 5-7.
Фиг. 3 схематично изображает принятые (эхо-сигналы) зондовые сигналы в конкретном элементе приемника в приемнике 7. Принятые сигналы соответствуют эхо-сигналам 11b двух переданных вторых зондовых сигналов 11a, переданных вторым активным датчиком 3, и одной передаче первого зондового сигнала 12, переданного первым активным датчиком 2. В частности, сплошные и пунктирные формы волн на Фиг. 3 соответствуют эхо-сигналам от движущегося и статического источника, соответственно, и точечная форма волны соответствует принятому первому зондовому сигналу, переданному передатчиком 4 первого активного датчика 2. Таким образом, сигнал, принятый во втором активном датчике 3, и который исходит из первого активного датчика 2, не является эхо-сигналом от первого активного датчика 2, а является прямой передачей от первого активного датчика 2 ко второму активному датчику 3. Следовательно, форма волны первого зондового сигнала 12 от первого активного датчика 3 предпочтительно выбирается, чтобы быть некоррелированной к форме волны второго зондового сигнала 11a (и эхо-сигнала 11b соответственно), переданного вторым активным датчиком 3.
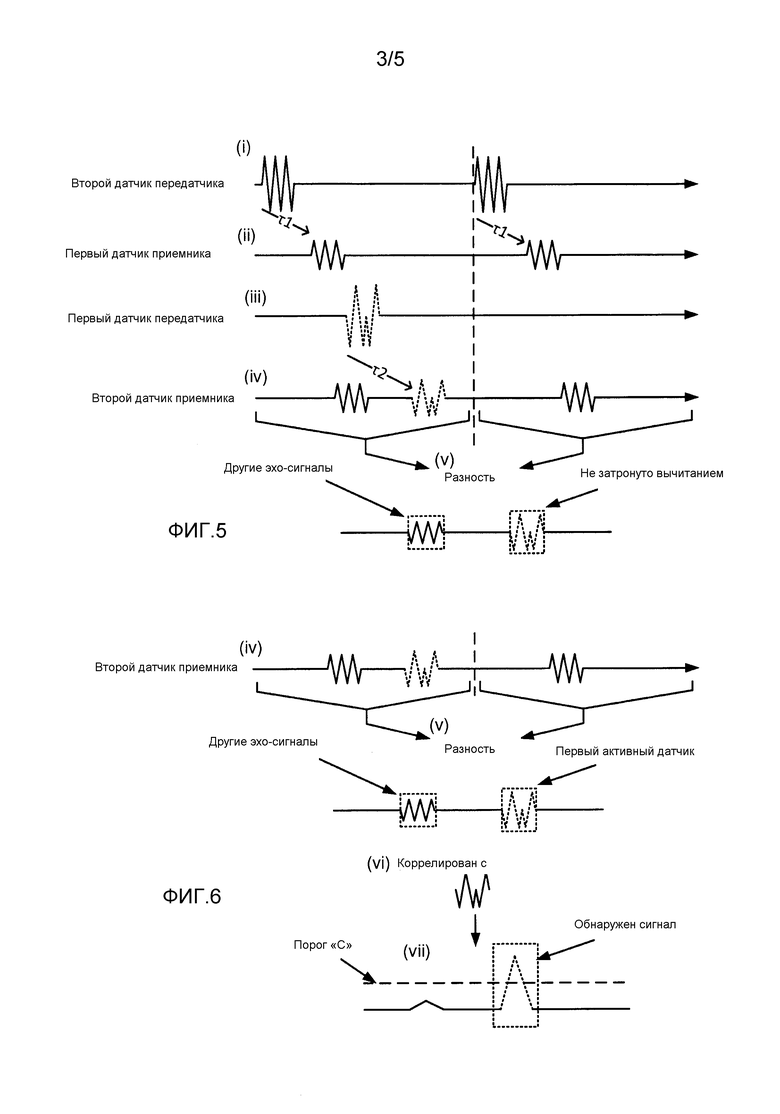
Первый зондовый сигнал 12, предпочтительно, содержит только одну пачку форм волны. Первый зондовый сигнал 12 преимущественно содержит только одну пачку форм волны, чтобы избежать исключения первого зондового сигнала 12 во время обработки сигнала в приемнике 7, например, при определении разности между импульсами в двух последовательных PRI. Этот процесс изображен на Фиг. 5. В (i) на Фиг. 5 второй зондовый сигнал (сплошные линии) находится в первом и втором PRI, переданных передатчиком 6 второго активного датчика 3. В (ii) эхо-сигнал второго зондового сигнала находится в первом и втором PRI, принятых приемником 7 второго активного датчика 3 во время τ1 после его передачи. В (iii) первый зондовый сигнал (точечные линии) передается первым активным датчиком 2. В (iv) также первый зондовый сигнал принимается вторым активным датчиком 3 во время τ2 после его передачи. Первый зондовый сигнал 12 принимается в приемнике 7 с произвольной временной задержкой от ее передачи посредством передатчика 4. Таким образом, задержка времени τ2 в большинстве случаев неизвестна в приемнике 7, потому что первый активный датчик 2 и второй активный датчик 3 необязательно синхронизированы. В (v) берется упомянутая разность между полученными сигналами, принятыми в первом и втором PRI, и так как есть только одна версия первого зондового сигнала (где первый зондовый сигнал предпочтительно отличается от второго зондового сигнала), первый зондовый сигнал не затрагивается вычитанием (или по меньшей мере оно не исключается полностью). Вычитание предпочтительно заключается в смещении времени и/или масштабировании сигнала в этих двух PRI.
Обычно в практических обстоятельствах (например в шумных средах) система управления 1 может быть достаточно устойчивой, если первый активный датчик 2 передает первый зондовый сигнал 12 более 1 раза. Первый зондовый сигнал 12 может быть передан каждое n-е PRI, где n>2. Первый зондовый сигнал 12 предпочтительно не передается в каждом втором PRI, потому что первый зондовый сигнал 12 будет затем исключен, когда будет получена разность в приемнике 7. Таким образом, (передатчик 4) первого активного датчика 2 может быть скомпонован, чтобы передать самое большее один первый зондовый сигнал 12 за каждые три передачи второго зондового сигнала 11a. Предпочтительно первый зондовый сигнал 12 является внутриполосным переданным сигналом относительно приемника 7 второго активного датчика 3. Переданная внутриполосная форма волны (колебательный сигнал) относится к форме волны (колебательному сигналу) с центральной частотой в пределах диапазона частот приемника 7.
В альтернативном варианте осуществления первый зондовый сигнал 12 является внеполосным сигналом относительно приемника 7 второго активного датчика 3. Такой внеполосный сигнал может, среди прочего, быть передан на акустических частотах или других ультразвуковых частотах в пределах диапазона частот приемника 7. Возможно использовать такой внеполосный сигнал при условии широкополосного частотного отклика элементов приемника второго активного датчика 3. Если принятая мощность превышает заранее определенный порог после корреляции на указанных частотах передачи, то направление прибытия (см. ниже) определяется на основании того, какое определение местоположение достигнута.
Как отмечено выше, система 1 управления может также содержать блок 8 обработки, который предпочтительно является частью второго активного датчика 3. Блок 8 обработки предпочтительно скомпонован для прогнозной оценки местоположения первого активного датчика 2 на основании принятого первого зондового сигнала 12. Как изображено на Фиг. 6, во втором активном датчике 3 следующая обработка может быть выполнена. В (vi) версия первого зондового сигнала 12 может быть доступной вторым активным датчиком 3. Например, локальная копия формы волны, переданная посредством первого активного датчика 2, поддерживается и коррелируется с принятым сигналом. Если первый активный датчик 2 должен быть уникально определен, то этап предварительной конфигурации может требоваться, где конкретная форма волны ассоциирована с первым активным датчиком 2, и его локальная копия хранится во втором активном датчике 3. Локальная копия предпочтительно является точной копией первого зондового сигнала 12. Если уникальной идентификации первого активного датчика 2 не требуется, то обычная заранее определенная форма волны (предпочтительно все еще отличающаяся от формы волны второго зондового сигнала 11a, который передан вторым активным датчиком 3, но не уникальная относительно различных первых активных датчиков) может быть использована, которая ранее была сохранена (или был доступной) во втором активном датчике 3 (среди прочего посредством программирования или вводом в эксплуатацию). Если дифференциальный сигнал во втором активном датчике 3 коррелирован с локальной копией формы волны от первого активного датчика 2, то в (vii) высокая корреляция может наблюдаться в момент, когда прямой первый зондовый сигнал принят вторым активным датчиком 3. Если корреляция выше, чем порог 'C, тогда может быть определено, что сигнал, равный локальной форме волны, был принят в этот момент времени. Если пик наблюдается из-за корреляции (на Фиг. 6 изображено как «сигнал обнаружен»), то разность фаз сигналов в различных элементах приемника в приемнике 7 может быть использована для определения направления приема (DoA), на основании которого локализуется (определяется его местоположение) первый активный датчик 2 (эквивалентно, пользователь первого активного датчика 2). Стандартный алгоритм DoA может использоваться для оценки DoA. При дальнейшей необязательной обработке DoA может сравниваться с DoA, которое определено (среди прочего, основываясь на отражениях из-за пользователя) первым активным датчиком 2, использующим принятые сигналы во втором активном датчике 3, на основании которого даже может быть определена удаленность пользователя относительно второго активного датчика 3. Компоненты сигнала, за исключением коррелированного компонента сигнала, могут быть использованы для определения присутствия и расширенной информации присутствия, как описано в WO2005/069698. Блок 8 обработки может затем, на основании оцененного местоположения первого активного датчика 2, управлять функцией освещения источника 9 света. Функция освещения предпочтительно относится к освещению местоположения, определенного для первого активного датчика 2.
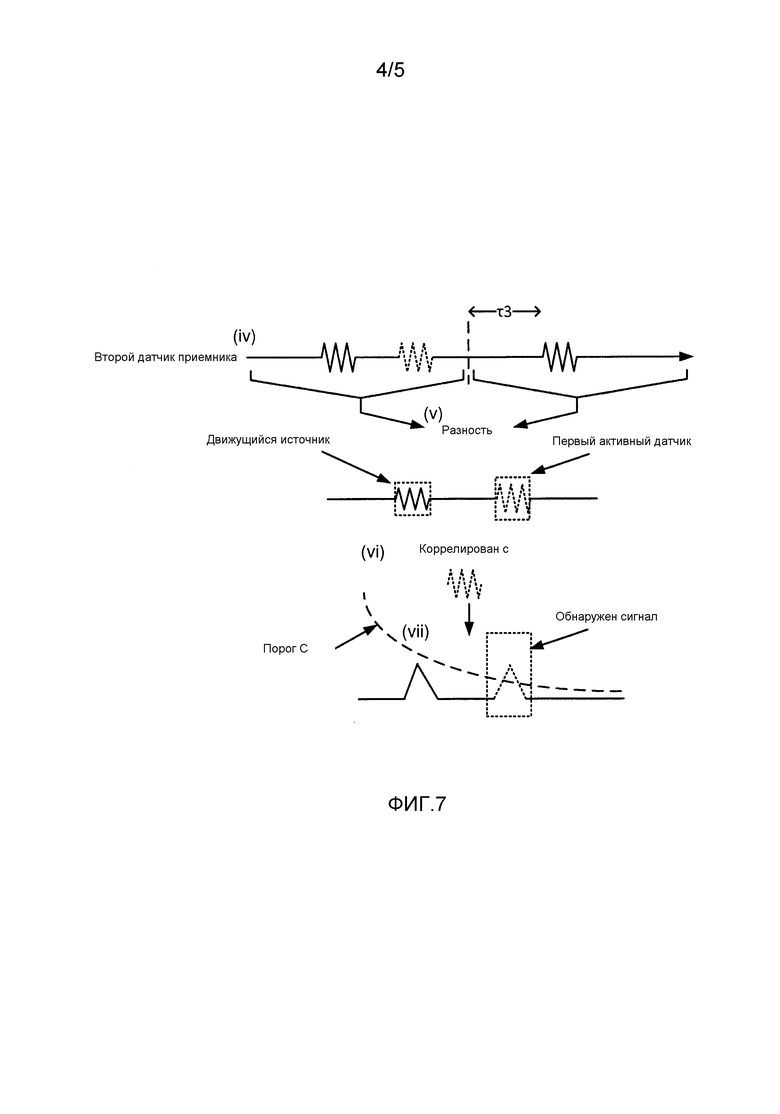
К настоящему времени предполагалось, что форма волны первого зондового сигнала 12 отличается от формы волны второго зондового сигнала 11a и его эхо-сигнала 11b, который принят приемником 7 второго активного датчика 3. Однако, возможно идентифицировать первый зондовый сигнал 12 также в случае, когда формы волны (колебательные сигналы) первого зондового сигнала 12 и второго зондового сигнала 11a идентичны. Фиг. 7. изображает ситуацию, где форма волны первого зондового сигнала 12 идентична форме волны второго зондового сигнала 11a, но где время прибытия в приемнике 7 отличается. Во втором PRI принимают только один сигнал. Задержка времени для упомянутого одного сигнала во втором PRI равна τ3. Так как только один сигнал принят во втором PRI, можно предположить, что никакая прямая передача не принята во втором PRI. Задержка времени τ3 может затем быть использована для установления порога C. В этом случае порог C будет иметь наклон. Наклон обычно зависит от τ3. Порог C не является, таким образом, фактически фиксированной константой, но пороговой функцией. Пороговая функция C определяется на основании τ3 таким образом, что сигнал в первом PRI соответствует сигналу, принятому во втором PRI при задержке времени τ3, не идентифицированному как прямая передача. Как отмечено на Фиг. 7, два пика имеют одну и ту же высоту, но посредством пороговой функции C только один пик идентифицируется как являющийся представительным для прямой передачи от первого активного датчика 2. Таким образом, прямая передача первого зондового сигнала 12 может быть идентифицирована даже при том, что и форма волны и амплитуда являются теми же самыми, что и у второго зондового сигнала 11a.
Альтернативно, если мощность передачи второго зондового сигнала 11a известна, то максимальная полученная мощность любого эхо-сигнала в заданном диапазоне может быть определена. Первый зондовый сигнал 12 первого активного датчика 2 только ослабляется посредством расстояния, а упомянутая мощность является такой же, как после дифференциальной обработки. Можно также предположить, что для заданного диапазона любой сигнал с мощностью выше пороговой инициируется из первого активного датчика. Эта процедура может иметь более высокую скорость необнаружения и может потребовать нескольких ретрансляций от первого активного датчика 3, чтобы гарантировать обнаружение первого зондового сигнала. Кроме того, это может потребовать большей мощности электропередачи передатчика 4 первого активного датчика 3.
Согласно вариантам осуществления первый активный датчик 2 также содержит приемник 5. Первый зондовый сигнал 12 затем предпочтительно передается (внутриполосно или внеполосно) только после того, как приемник 5 обнаруживает второй зондовый сигнал 12a, переданный вторым активным датчиком 3. Другими словами, передатчик 4 первого активного датчика 2 может быть скомпонован, чтобы передавать первый зондовый сигнал 11 в ответ на прием второго зондового сигнала 12a приемником 5. Предположим, что продолжительность (времени прохождения) для односторонней передачи (первого и/или второго) зондовых сигналов между первым активным датчиком 2 и вторым активным датчиком равна τ3. Первый зондовый сигнал 12 затем принимается в приемнике 7 при задержке времени приблизительно τ2, которая относится к расстоянию между первым активным датчиком 2 и вторым активным датчиком 3, как изображено на Фиг 4. Местоположение портативного датчика может затем быть получено посредством использования DoA, как определено выше, и посредством времени прохождения сигнала.
Согласно вариантам осуществления приемник 5 первого активного датчика 2 является матричным датчиком, который содержит матрицу элементов приемника. Таким образом, когда пользователь первого активного датчика 2 захочет локализованный эффект освещения, первый активный датчик 2 может быть скомпонован, чтобы активизировать свой матричный датчик в режиме прослушивания. Принятые сигналы в матричном датчике, полученные посредством передачи вторых зондовых сигналов 11a от второго активного датчика 3, могут затем быть использованы для определения DoA и определения местоположения первого активного датчика 2 относительно второго активного датчика 3. Эта информация затем может быть сигнализирована назад контроллеру освещения. Подача сигнала может быть осуществлена, используя различные способы воздействия, среди прочего, инфракрасный красный, модулированный свет, испускаемый светодиодами и т.д.
Типично зондовые сигналы имеют центральную частоту приблизительно 30-50 кГц, предпочтительно 25-45 кГц, еще более предпочтительно 40 кГц и диапазон частот приблизительно 1-5 кГц, предпочтительно 1-3 кГц, еще более предпочтительно 2 кГц. Как пример, серийно выпускаемые передатчики с центральной частотой 40 кГц имеют диапазон частот 2 кГц.
Специалисты в области должны учитывать, что настоящее изобретение ни в коем случае не ограничено предпочтительными вариантами осуществления, описанными выше. Напротив, много модификаций и изменений возможны в рамках приложенной формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОБНАРУЖЕНИЕ ИНТЕРФЕРЕНЦИИ В СЕТИ АКТИВНЫХ ДАТЧИКОВ | 2013 |
|
RU2617324C2 |
| УМЕНЬШЕНИЕ ИСКАЖЕНИЯ ПРИ РАСПОЗНАВАНИИ | 2014 |
|
RU2653357C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ИНФОРМАЦИИ ОБ АМПЛИТУДЕ И ФАЗЕ ЭЛЕКТРОМАГНИТНОЙ ВОЛНЫ | 1997 |
|
RU2182385C2 |
| СИСТЕМА ОКРУЖАЮЩЕЙ ТЕЛЕКОММУНИКАЦИИ, СПОСОБ РАБОТЫ ТАКОЙ СИСТЕМЫ И МАШИНОЧИТАЕМЫЙ НОСИТЕЛЬ | 2010 |
|
RU2542345C2 |
| ЛОКАЛИЗАЦИЯ, ОСНОВАННАЯ НА СЕТИ ИЗ БЕСПРОВОДНЫХ УЗЛОВ | 2015 |
|
RU2695510C2 |
| УСТРОЙСТВО ДАТЧИКА, СЕРВЕР, СИСТЕМА ДЛЯ ДИАГНОСТИКИ УЛЬТРАЗВУКОВОГО ИЗОБРАЖЕНИЯ И СПОСОБ ОБРАБОТКИ УЛЬТРАЗВУКОВОГО ИЗОБРАЖЕНИЯ | 2013 |
|
RU2627638C2 |
| УЛЬТРАЗВУКОВАЯ ПЕРЕДАЧА/ПРИЕМ ДЛЯ ЭЛЕКТРОМАГНИТНОЙ ПЕРЕДАЧИ/ПРИЕМА | 2009 |
|
RU2576483C2 |
| СРЕДСТВО НА ОСНОВЕ ПЛАНШЕТА ДЛЯ ВВОДА В ЭКСПЛУАТАЦИЮ АДРЕСНОГО ОСВЕЩЕНИЯ | 2015 |
|
RU2653503C2 |
| ПОДВОДНАЯ СИСТЕМА ПЕРЕДАЧИ ДАННЫХ С ВЫСОКОЙ ПРОПУСКНОЙ СПОСОБНОСТЬЮ | 2014 |
|
RU2624629C2 |
| ПОДВОДНАЯ СИСТЕМА ПЕРЕДАЧИ ДАННЫХ С ВЫСОКОЙ ПРОПУСКНОЙ СПОСОБНОСТЬЮ | 2014 |
|
RU2660382C1 |
Стратегии управления освещением, адаптивные к присутствию, как известно, являются очень эффективными при сокращении потребления энергии в зданиях. Ультразвуковые матричные датчики были предложены для надежного восприятия присутствия. Раскрыты системы и способы, посредством которых дополнительные функциональные возможности восприятия могут быть возможны для предложения новых функций управления с матричным датчиком в качестве базовой платформы восприятия. В частности, рассматриваются: гибридное восприятие, которое комбинирует портативные датчики (возможно, с разрешения пользователя) и датчики с фиксированной инфраструктурой. Применениями, например, являются активные датчики присутствия в применениях управления освещением. 2 н. и 13 з.п. ф-лы, 8 ил.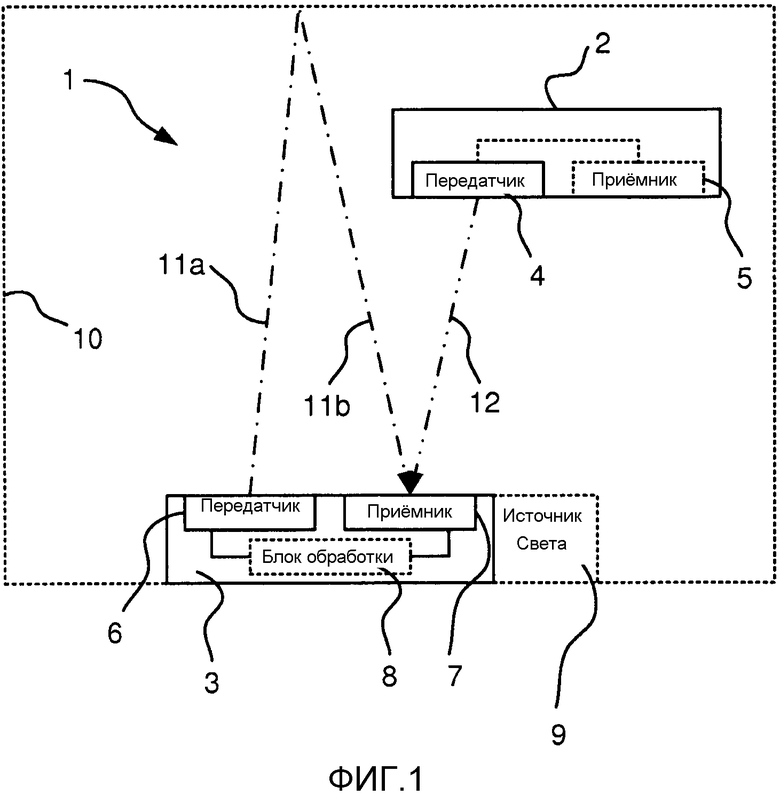
1. Система управления (1) для управления освещением в зависимости от присутствия/отсутствия объекта в помещении, содержащая:
первый активный датчик (2), содержащий передатчик (4), скомпонованный, чтобы передавать первый зондовый сигнал (12); и
второй активный датчик (3), содержащий передатчик (6), скомпонованный, чтобы передавать второй зондовый сигнал (11a), и матрицу (7) датчиков приемника, скомпонованную, чтобы принять упомянутый первый зондовый сигнал и эхо-сигнал (11b) упомянутого второго зондового сигнала;
при этом упомянутый первый зондовый сигнал отличается от упомянутого второго зондового сигнала таким образом, что в упомянутом матричном датчике приема между упомянутым первым зондовым сигналом и упомянутым вторым зондовым сигналом исключаются помехи, причем форма волны первого зондового сигнала (12) выбрана так, чтобы быть некоррелированной с формой волны второго зондового сигнала (11а).
2. Система управления по п. 1, дополнительно содержащая источник (9) света и блок (8) обработки, при этом упомянутый блок обработки скомпонован для прогнозной оценки местоположения упомянутого первого активного датчика на основании упомянутого принятого первого зондового сигнала и для управления функцией освещения упомянутого источника света в соответствии с упомянутой прогнозной оценкой местоположения упомянутого первого активного датчика.
3. Система управления по п. 1 или 2, в которой упомянутый первый активный датчик является портативным датчиком и в которой упомянутый второй активный датчик является фиксированным датчиком инфраструктуры.
4. Система управления по п. 2, в которой упомянутый источник света содержит упомянутый второй активный датчик.
5. Система управления по п. 1, в которой упомянутая принимающая матрица датчиков скомпонована, чтобы выполнять измерения направления прибытия, чтобы оценивать местоположение упомянутого первого активного датчика.
6. Система управления по п. 1, в которой упомянутая матрица датчиков скомпонована, чтобы выполнять корреляцию, чтобы обнаруживать упомянутый первый зондовый сигнал.
7. Система управления по п. 1, в которой упомянутый первый активный датчик и упомянутый второй активный датчик являются или датчиками, основанными на ультразвуке, или датчиками, основанными на радаре.
8. Система управления по п. 1, в которой упомянутый первый активный датчик скомпонован, чтобы передавать самое большее один первый зондовый сигнал в течение каждых трех передач упомянутого второго зондового сигнала.
9. Система управления по п. 1, в которой версия упомянутого первого зондового сигнала доступна для упомянутого второго активного датчика.
10. Система управления по п. 9, в которой упомянутая версия упомянутого первого зондового сигнала является точной копией упомянутого первого зондового сигнала.
11. Система управления по п. 1, в которой упомянутый первый активный датчик также содержит приемник (5), скомпонованный, чтобы принимать упомянутый второй зондовый сигнал, и в которой упомянутый передатчик упомянутого первого активного датчика скомпонован, чтобы передавать упомянутый первый зондовый сигнал в ответ на прием упомянутого второго зондового сигнала упомянутым приемником.
12. Система управления по п. 11, в которой упомянутый приемник упомянутого первого активного датчика является матричным датчиком.
13. Система управления по п. 1, в которой упомянутый первый зондовый сигнал передается в пределах диапазона частот упомянутого передатчика упомянутого второго активного датчика.
14. Система управления по п. 1, в которой упомянутый первый зондовый сигнал передается вне диапазона частот упомянутого передатчика упомянутого второго активного датчика.
15. Способ в системе управления (1) для осуществления управления освещением в зависимости от присутствия/отсутствия объекта в помещении, содержащей первый активный датчик (2) и второй активный датчик (3), содержащий этапы, на которых:
передают (S02) передатчиком (4) упомянутого первого активного датчика первый зондовый сигнал (12);
передают (S04) передатчиком (6) упомянутого второго активного датчика второй зондовый сигнал (11a); и
принимают (S06) матрицей (7) датчиков приемника упомянутого второго активного датчика упомянутый первый зондовый сигнал и эхо-сигнал (11b) упомянутого второго зондового сигнала;
в котором упомянутый первый зондовый сигнал отличается от упомянутого второго зондового сигнала таким образом, что в упомянутой матрице датчика приемника между упомянутым первым зондовым сигналом и упомянутым вторым зондовым сигналом избегают помехи, причем форму волны первого зондового сигнала (12) выбирают так, чтобы быть некоррелированной с формой волны второго зондового сигнала (11а).
| WO2011151772 A1, 08.12.2011 | |||
| Цифровой привод | 1975 |
|
SU681413A1 |
| US2004141633 A1, 22.07.2004 | |||
| WO2005069698 A1, 28.07.2005 | |||
| JPH09287913 A, 04.11.1997. | |||

