Область техники
Настоящее изобретение относится к стабилизации лесозаготовительной машины и, в частности, к способу и устройству для стабилизации по меньшей мере одной рамной части указанной лесозаготовительной машины.
Уровень техники
Различным движущимся транспортным средствам или машинам часто приходится работать на местности, имеющей разнообразные неровности, а также на наклонных поверхностях, вследствие чего важно тем или иным способом обеспечить достаточный контакт с грунтом тех элементов транспортного средства или машины, которые обеспечивают возможность его перемещения, например, колес и/или гусениц. Как правило, сохранение как можно лучшего контакта с грунтом или другой рабочей поверхностью является целесообразным по различным причинам, к которым относится поступательное движение и тяговая мощность транспортного средства, хорошее сцепление между поверхностью и транспортным средством, как можно меньшее поверхностное давление на грунт или высокая устойчивость. Обычно такие свойства наиболее явно выражены у вездеходных транспортных средств или машин, таких как военные транспортные средства или различные лесотехнические машины, используемые для машинной валки деревьев. Указанные свойства можно улучшить, например, обеспечив возможность вращения валов, осей или, особенно в случае машин с рамным управлением, отдельных рам друг относительно друга. Различные устройства, известные из уровня техники и относящиеся к вращению рам такого типа, отличаются по существу тем, что они обеспечивают возможность вращения, а, с другой стороны, предотвращают указанное вращение или управляют им, при необходимости, посредством зубчато-кольцевой шпонки с гидравлическим управлением, фрикционного тормоза или запорных клапанов и гидравлических цилиндров. Одно из таких технических решений раскрыто в публикации WO 03055735.
Кроме того, известна возможность компоновки двух отдельных рам лесотехнической машины или другой движущейся рабочей машины рядом друг с другом посредством так называемого шарнира рамного управления, обеспечивающего управление рабочей машиной, и шарнирного соединения, обеспечивающего взаимное вращение рам по существу относительно продольной оси транспортного средства. Одно из таких технических решений описано, например, в документе ЕР 1261515.
Типичная проблема известных из уровня техники устройств заключается в том, что вращение рам относительно друг друга предотвращают и обеспечивают на основе данных о состоянии, полученных от трансмиссии тягового средства. Таким образом, типичный режим эксплуатации состоит в том, чтобы предотвратить вращение рам относительно друг друга, когда машина не приведена в движении, и обеспечить вращение рам, когда машина находится в движении. Однако, такой режим значительно ограничивает последующее использование крана и радиус его действия во время движения, поскольку рамная часть, содержащая кран, не поддерживается при этом никаким способом. С другой стороны, основополагающее предположение состоит в том, что стреловой узел машины используется только в том случае, когда машина неподвижна, что, например, значительно снижает производительность работы харвестера и форвардера. Другая типичная проблема известных технических решений связана с приведением транспортного средства в движение, когда вращение рамы было предотвращено с использованием высокого опорного момента. Когда блокировка вращения рамы снята, рамы стремятся к новому положению равновесия, при этом рама или рамы способны раскачиваться с большой силой и резкостью. Известные из уровня техники решения, как правило, основаны также на предварительно заданных блокировках или ослаблении либо предотвращении вращения между рамными частями, в результате чего они не позволяют реагировать на изменяющиеся обстоятельства.
Еще одна проблема известных технических решений, содержащих зацепляющиеся зубья и предусматривающих аналогичные варианты реализации фиксатора рамы, не являющегося бесступенчатым, состоит в том, что фиксатор часто блокируется в положении, немного отличном от положения, действительно необходимого для заданной местности и положения рамы машины, что вызывает неустойчивость, проявляющуюся, например, в зависании машины на ее основании. Была предпринята попытка устранить указанную проблему путем предложения решений, основанных на бесступенчатой блокировке, например, тормоза, реализуемого посредством гидравлических цилиндров и основанного на трении, что обеспечивает возможность точной блокировки в требуемом положении вращения рам относительно друг друга. Однако даже указанные технические решения не позволяют учесть, например, изменение несущей способности грунта под машиной. Кроме того, механические напряжения, создаваемые на поверхности грунта во время работы, могут приводить к неравномерному распределению давления на поверхности, однако машина остается в неустойчивом положении, в частности, когда она неподвижна в течение продолжительного периода времени при непрерывной погрузке или работе.
Раскрытие изобретения
Таким образом, задача настоящего изобретения заключается в том, чтобы предложить способ и устройство, обеспечивающее реализацию указанного способа, которые позволят устранить упомянутые выше проблемы. Указанная задача решена посредством способа и устройства, которые характеризуются признаками, изложенными в независимых пунктах формулы изобретения. Предпочтительные варианты осуществления настоящего изобретения раскрыты в зависимых пунктах формулы изобретения.
Согласно одному из аспектов в настоящем изобретении предложен способ стабилизации по меньшей мере одной рамной части лесозаготовительной машины, содержащий этапы, на которых: определяют составляющую момента, приложенного полезной нагрузкой лесозаготовительной машины к поддерживаемой рамной части, причем указанная составляющая действует относительно по меньшей мере по существу продольной оси вращения, и на основе по меньшей мере момента, приложенного указанной полезной нагрузкой к поддерживаемой рамной части, определяют величину и направление по меньшей мере одного опорного момента, необходимого по меньшей мере для стабилизации указанной рамной части.
Согласно второму аспекту в настоящем изобретении предложено устройство для стабилизации по меньшей мере одной рамной части лесозаготовительной машины, содержащее по меньшей мере средства для определения составляющей момента, приложенного полезной нагрузкой лесозаготовительной машины к поддерживаемой рамной части, причем указанная составляющая действует относительно по меньшей мере по существу продольной оси вращения лесозаготовительной машины, и средства для определения на основе момента, приложенного полезной нагрузкой к поддерживаемой рамной части, величины и направления по меньшей мере одного опорного момента, необходимого по меньшей мере для стабилизации указанной рамной части.
Идея настоящего изобретения заключается в том, что опорный момент, необходимый для стабилизации рамной части, определяют новым способом, используя вычисленный момент, приложенный полезной нагрузкой к поддерживаемой рамной части.
Преимущество предлагаемого способа и устройства состоит в том, что они позволяют осуществлять автоматическую регулировку стабилизации в соответствии с рабочей ситуацией и доминирующими обстоятельствами. Кроме того, настоящее изобретение позволяет использовать устройства, применяемые для управления вращением рамы, новым способом для стабилизации машины как в процессе движения, так и в неподвижном состоянии.
Способ согласно одному из вариантов осуществления настоящего изобретения предусматривает также определение той составляющей момента, приложенного полезной нагрузкой к поддерживаемой рамной части, которая действует относительно поперечной оси лесозаготовительной машины.
Способ согласно второму варианту осуществления настоящего изобретения предусматривает создание и регулирование требуемого опорного момента в соответствии с заданной величиной и направлением.
В способе согласно третьему варианту осуществления настоящего изобретения указанный опорный момент создают посредством по меньшей мере одного исполнительного механизма, используемого для формирования предварительно заданного момента в нужном направлении и для блокировки указанного по меньшей мере одного исполнительного механизма в его текущем положении для предотвращения вращения рамных частей относительно друг друга.
Способ согласно четвертому варианту осуществления настоящего изобретения предусматривает определение положения и/или состояния движения по меньшей мере одной поддерживающей рамной части и по меньшей мере одной поддерживаемой рамной части по отношению к ускорению, вызванному вектором тяготения, причем величину и направление по меньшей мере одного опорного момента, необходимого по меньшей мере для стабилизации рамной части, определяют на основе по меньшей мере указанных положений и/или состояний движения и указанной составляющей момента, приложенного полезной нагрузкой к поддерживаемой рамной части, причем указанная составляющая действует относительно по меньшей мере по существу продольной оси вращения.
Способ согласно пятому варианту осуществления настоящего изобретения также предусматривает выполнение анализа устойчивости рамных частей на основе указанных положений и/или состояний движения и указанного момента, а также выбор на основе результатов указанного анализа устойчивости рабочего состояния лесозаготовительной машины среди предварительно заданных альтернативных вариантов. В некоторых вариантах осуществления настоящего изобретения указанные альтернативные варианты рабочего состояния включают в себя по меньшей мере одно из следующих рабочих состояний: активную стабилизацию, блокировку положения рамных частей относительно друг друга, остановку движения и выдача сигнала предупреждения пользователю о приближении крайнего положения и/или о моменте времени, когда крайнее положение достигнуто.
В некоторых вариантах осуществления настоящего изобретения предлагаемое устройство для стабилизации по меньшей мере одной рамной части лесозаготовительной машины может содержать средства для реализации одного или нескольких из указанных этапов предлагаемого способа.
Согласно одному из вариантов осуществления настоящего изобретения средства для создания и регулирования требуемого опорного момента содержат по меньшей мере один исполнительный механизм, используемый для приложения предварительно заданного момента по меньшей мере в одном необходимом направлении, причем указанный по меньшей мере один исполнительный механизм выполнен с возможностью блокировки в своем текущем положении для предотвращения вращения рамных частей относительно друг друга.
Согласно еще одному варианту осуществления настоящего изобретения средства для определения положения и/или состояния движения по меньшей мере одной поддерживаемой рамной части по отношению к ускорению, вызванному вектором тяготения, содержат по меньшей мере один датчик. В некоторых вариантах осуществления настоящего изобретения указанный датчик может представлять собой одно из следующих устройств: датчик ускорения, измеритель угла наклона и датчик угловой скорости.
Согласно еще одному варианту осуществления настоящего изобретения указанные средства для определения той составляющей момента, приложенного полезной нагрузкой лесозаготовительной машины к поддерживаемой рамной части, которая действует относительно по меньшей мере оси вращения, предусматривают выполнение по меньшей мере: измерения шарнирного угла поворота стрелового узла, измерения мощности подъемного цилиндра и измерения шарнирного угла в сочленении между основанием стрелового узла и подъемным цилиндром.
Согласно еще одному варианту осуществления настоящего изобретения указанные средства для определения величины и направления по меньшей мере одного опорного момента, необходимого по меньшей мере для стабилизации рамной части, содержат по меньшей мере блок управления.
Согласно еще одному варианту осуществления настоящего изобретения указанные средства для выполнения анализа устойчивости рамных частей и для выбора рабочего состояния лесозаготовительной машины содержат по меньшей мере блок управления.
Согласно еще одному аспекту в настоящем изобретении предложена лесозаготовительная машина, содержащая устройство для стабилизации по меньшей мере одной рамной части лесозаготовительной машины.
Краткое описание чертежей
Далее приведено подробное описание настоящего изобретения на основе предпочтительных вариантов его осуществления, со ссылками на прилагаемые чертежи, на которых изображено следующее.
На фиг. 1а, 1b и 1с схематично представлены три варианта осуществления лесозаготовительной машины.
На фиг. 2а и 2b схематично показана лесозаготовительная машина при наблюдении с различных направлений.
На фиг. 3 схематично показана лесозаготовительная машина.
На фиг. 4 схематично показана лесозаготовительная машина согласно другому варианту осуществления настоящего изобретения.
На фиг. 5 схематично проиллюстрирован способ стабилизации по меньшей мере одной рамной части лесозаготовительной машины.
На фиг. 6 схематично проиллюстрирован пример опорного момента рамной части в ситуации, представленной на фиг. 2b.
На фиг. 7 схематично показано устройство для стабилизации по меньшей мере одной рамной части лесозаготовительной машины.
На фиг. 8 схематично проиллюстрирован вариант способа стабилизации по меньшей мере одной рамной части лесозаготовительной машины.
Осуществление изобретения
Предлагаемые в настоящем изобретении способ и устройство предпочтительно используют, например, применительно к транспортным средствам и машинам, в частности, к лесохозяйственным машинам, таким как харвестеры, ковшовые фронтальные погрузчики или комбинации указанных машин, которые содержат или перемещают полезные нагрузки и часто движутся по такой местности, которая представляет собой неровный грунт и/или грунт, нагрузочная способность которого меняется. Лесозаготовительная машина указанного типа, как правило, содержит по меньшей мере два блока или секции, соединяемые друг с другом посредством соединительных элементов или конструкций, по меньшей мере обеспечивающих возможность вращения относительно продольной оси транспортного средства или машины, или относительно другой оси вращения, по существу параллельной ей. Вместо этого или в дополнение к этому, лесозаготовительная машина может содержать качающуюся ось, расположенную с возможностью вращения относительно продольной оси машины, причем конструкция качающейся оси образует одну из указанных секций. В некоторых вариантах осуществления настоящего изобретения качающаяся ось указанного типа может представлять собой ведущую ось, причем в данном случае фактически существующая рама лесозаготовительной машины может быть жесткой, или отпадает необходимость для по меньшей мере одного шарнира, по возможности соединяющего части указанной реальной рамы, в наличии степени свободы, или указанный шарнир может быть жестким по меньшей мере в отношении вращения, происходящего вокруг продольной оси лесозаготовительной машины. Иными словами, хотя в различных вариантах осуществления настоящего изобретения указанные выше блоки и секции могут отличаться друг от друга, и даже значительно, по размеру, конструкции и взаимному расположению, для простоты в описании настоящего изобретения все указанные блоки и секции называются «рамными частями».
Каждая рамная часть может в каждом случае представлять собой, например, фактически существующую отдельную рамную часть лесозаготовительной машины или даже просто вал, установленный, например, в каждом случае по меньшей мере на одной другой рамной части по существу с возможностью вращения относительно продольной оси вращения лесозаготовительной машины, такой как, предпочтительно, качающаяся ось, например, качающаяся полуось тандема, гусеничная система, отдельный вал или хорошо известный подобный вал, по возможности оснащенный необходимыми конструкционными и/или крепежными элементами.
В контексте настоящего изобретения под моментом, создаваемым полезной нагрузкой, то есть моментом, приложенным полезной нагрузкой к одной или нескольким рамным частям, понимают момент, создаваемый физическим предметом, таким как стреловой узел и/или груз, содержащийся в лесозаготовительной машине или перемещаемый лесозаготовительной машиной, и связанный с работой лесозаготовительной машины, или момент, создаваемый лесозаготовительной машиной или ее частью, причем указанный момент воздействует, по меньшей мере кратковременно, на устойчивость лесозаготовительной машины, стремясь повернуть поддерживаемую раму, обычно по меньшей мере по существу относительно продольной оси С вращения лесозаготовительной машины. Таким образом, момент, создаваемый рассматриваемой полезной нагрузкой, может быть вызван стреловым узлом, отклонившимся от продольного направления лесозаготовительной машины, и/или инструментом, присоединенным к такому стреловому узлу, например харвестерной или подъемной головкой, или какой-то другой массой, например, перемещаемым лесоматериалом, или грузом форвардера или полезной нагрузкой, сравнимой с ними, или инерцией массы такого типа. Момент также может быть вызван, например, действием харвестерной головки при подаче ствола дерева, в ходе которого прижимные ролики харвестерной головки часто воздействуют на ствол со значительной силой в горизонтальном направлении ствола. С другой стороны, значительный момент может также быть вызван в ситуации, когда харвестерная головка используется для прочного захвата ствола дерева, удерживаемого грунтом, например, ствола дерева, поваленного во время бури. В различных вариантах осуществления настоящего изобретения рамная часть или части лесозаготовительной машины могут подвергаться воздействию даже нескольких моментов, вызванных полезными нагрузками, одновременно или, в зависимости от варианта использования или ситуации при передвижении, например, несколькими стрелами, стрелой и грузом, расположенным в грузовом пространстве, или другими аналогичными источниками. В различных вариантах осуществления или ситуациях моменты, вызванные указанными полезными нагрузками и приложенные к одной или нескольким рамным частям лесозаготовительной машины, могут действовать в одном направлении, в разных направлениях, а также в противоположных направлениях, причем термин «момент, вызванный полезной нагрузкой» относится в этом случае к общему моменту, состоящему из моментов, создаваемых этими частичными полезными нагрузками и действующими на каждую рамную часть лесозаготовительной машины. Когда исследуют только ту составляющую момента, приложенного к рамной части полезной нагрузкой, которая действует относительно оси С вращения, то, естественно, возможны только два направления момента. Однако в различных вариантах осуществления настоящего изобретения могут также учитываться составляющие вызванного полезной нагрузкой момента, действующие в других направлениях, например, составляющие, действующие относительно поперечной оси лесозаготовительной машины.
Предлагаемые в настоящем изобретении способ и устройство позволяют осуществлять автоматическую регулировку стабилизации в соответствии с рабочей ситуацией и доминирующими обстоятельствами, например, регулировку стабилизации в соответствии с изменениями общего момента, вызванного неровностью рельефа местности или полезной нагрузкой. В контексте настоящего изобретения стабилизация означает, что различные рамные части машины будут оставаться как можно более устойчивыми во время работы и/или движения машины, то есть они не будут наклоняться или отклоняться значительно относительно каждого конкретного положения под воздействием момента, вызванного полезной нагрузкой или силой инерции, например, относительно положения, в которое установлена машина в конкретный момент времени или которое указанная машина занимает под действием форм рельефа местности. Иными словами, задача заключается в том, чтобы свести к минимуму воздействие общего момента, вызванного полезной нагрузкой (или нагрузками), на состояние движения и положение рамных частей машины. В то же время, задача состоит в том, чтобы как можно более равномерно распределить момент, вызванный полезной нагрузкой, по многим опорным точкам или по как можно более широкой зоне и/или по меньшей мере обеспечить, чтобы все опорные точки соприкасались с грунтом или какой-либо другой рабочей площадкой. Иными словами, механические напряжения, направленные к различным рамным частям, распределены более равномерно, чем раньше. С другой стороны, это позволяет также более равномерно распределять давление на поверхности между машиной и площадкой. Таким образом, стабилизация в данном контексте не означает направленное движение одной или нескольких рамных частей, например, в конкретное положение относительно друг друга или основания.
В этой связи рассмотрим так называемую одну или несколько поддерживающих рамных частей или одну или несколько поддерживаемых рамных частей. Поддерживаемая рамная часть означает рамную часть, к которой преимущественно направлен момент, вызываемый полезной нагрузкой, то есть, как правило, рамную часть, на которой установлена конструкция, такая как стреловой узел, например, крана, погрузчика, или другой стреловой узел, грузовое пространство и т.д., которые воспринимают момент, вызываемый полезной нагрузкой. Поддерживающая рамная часть, то есть, рамная часть, обеспечивающая опору, означает рамную часть, на которой нагрузка, создаваемая моментом, вызываемым полезной нагрузкой, распределяется и/или передается путем стабилизации, например, путем создания необходимого опорного момента посредством по меньшей мере одного исполнительного механизма. В других ситуациях движения и/или использования машины другие рамные части также могут служить в качестве поддерживающих и/или поддерживаемых рамных частей. В некоторых случаях, например, когда стреловой узел установлен на одной рамной части, а грузовое пространство - на другой рамной части, поддерживающая рамная часть и поддерживаемая рамная часть могут изменяться в соответствии с положением рамных частей и/или стрелового узла и, в заданных ситуациях, обе рамные части могут подвергаться воздействию момента, вызванного полезной нагрузкой, причем в указанном случае каждая рамная часть, в некотором смысле, представляет собой как поддерживающую, так и поддерживаемую рамную часть.
Иными словами, стабилизация может быть использована для того, чтобы как можно более равномерно распределять момент, вызванный полезной нагрузкой, между различными рамными частями. Если лесозаготовительная машина содержит по меньшей мере одну качающуюся ось, образующую рамную часть в рассматриваемом случае, то указанная качающаяся ось может быть использована для стабилизации, в результате чего момент, вызванный полезной нагрузкой, можно разделять, в зависимости от варианта осуществления настоящего изобретения, например, между качающейся осью и неподвижной осью, расположенной на раме лесозаготовительной машины, или среди нескольких маятниковых валов, образующих одну рамную часть.
Такое техническое решение позволяет эффективно использовать стреловой узел также во время вождения. Обеспечение эффективной погрузки также во время движения машины позволяет значительно повысить производительность, в частности, операций, выполняемых форвардером. В известных из уровня техники решениях это было возможно только в том случае, если грузовое пространство форвардера уже содержало достаточное количество погруженного лесоматериала, причем в указанном случае общая масса так называемой задней рамы, как правило, расположенной ниже грузового пространства, и указанного груза была достаточной для поддержания рамы под форвардером в выпрямленном состоянии. Однако это вызывало неравномерное напряжение на конструкциях рамы и, вследствие этого, значительную нагрузку, в частности, на зону, расположенную между основанием и задней тележкой или задней осью форвардера. Указанное явление напряженного состояния особенно заметно, когда форвардер нагружен во время движения. Настоящее решение отличается от известных технических решений тем, что напряжение, воздействующее на рамную часть, на которой установлен стреловой узел, можно значительно уменьшить путем получения части опорного момента также за счет поддерживающей (передней) рамы, что обеспечивает возможность, например, значительного уменьшения нагрузки точно в зоне между основанием 15 стрелового узла и задней тележкой или задней осью 16.
Кроме того, настоящее изобретение всегда обеспечивает возможность по меньшей мере такого же устойчивого поведения машины, как в случае наличия известного из уровня техники фиксатора рамы с полным блокированием. Кроме того, оно позволяет машине передвигаться даже в том случае, когда стрела с поддерживаемым на ее конце инструментом, например, захватным устройством или харвестерной головкой с перемещаемым лесоматериалом, находится с одной стороны машины. Однако, настоящее изобретение позволяет также совершенно свободно передавать и распределять нагрузку в рамных конструкциях машины. В результате, прочностные качества рамных конструкций машины и различные рабочие ситуации можно учитывать с достаточной степенью гибкости.
Кроме того, настоящее изобретение позволяет контролируемым способом выявлять ситуацию, при которой опорный момент, обеспечиваемый поддерживающей рамой, или способность исполнительных механизмов, управляющих вращением, передавать момент становятся недостаточными для стабилизации поддерживаемой рамной части. В зависимости от варианта осуществления настоящего изобретения в подобной ситуации можно применять различные функции, такие как выдача сигнала предупреждения пользователю, и/или различные модели управления, такие как остановка движения или взаимная блокировка рам.
Еще одно преимущество настоящего изобретения заключается в том, что не происходит чрезмерной передачи вибрации, толчков или других движений от поддерживаемой рамной части к поддерживающей рамной части или к кабине водителя, установленной на поддерживающей раме, а также к рабочей зоне водителя. Это чрезвычайно важно с точки зрения охраны здоровья водителя и эргономики, причем решения такого типа необходимы, например, в соответствии с официально установленными требованиями в отношении вибраций. С другой стороны, для машин, у которых кабина управления находится на поддерживаемой раме, данное решение обеспечивает модель управления, эффективно стабилизирующую поддерживаемую раму, так как оно позволяет получить для поддерживаемой рамы более высокий опорный момент, чем возможен при использовании абсолютно жесткого фиксатора рамы.
Кроме того, настоящее изобретение позволяет устранить явные точки разрыва непрерывности на путях/траекториях нагружения рамных конструкций машины, в результате чего нагрузка может распределяться по всей рамной конструкции более равномерно, чем раньше. Кроме того, можно избежать пиков нагрузки и толчков, вызываемых разблокированием и блокированием традиционного рамного фиксатора.
Еще одно явное преимущество настоящего изобретения состоит в том, что, по сравнению с известными техническими решениями, оно позволяет лучше, более равномерно распределять давление на поверхность между машиной и грунтом по всем осям, колесным тележкам или другим элементам машины, что, в свою очередь, обеспечивает различные преимущества, связанные с надежностью машины и повреждениями, вызываемыми рельефом местности.
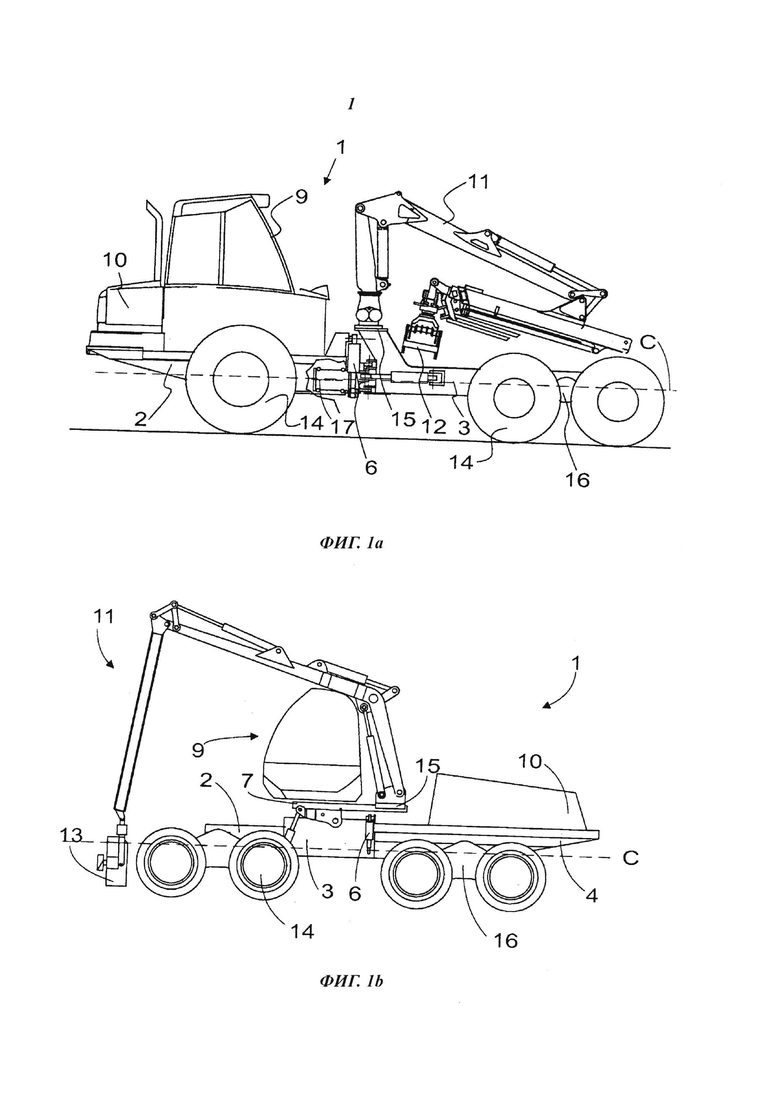
На фиг. 1а, 1b и 1с схематично представлены три варианта осуществления лесозаготовительной машины 1. Элементы, имеющие одинаковую конструкцию и/или назначение, на чертежах обозначены одинаковыми номерами позиций. Лесозаготовительная машина 1, форвардер на фиг. 1а и харевестер на фиг. 1b, может содержать рамные части, в случае, показанном на фиг. 1а, - две рамные части 2, 3, соединенные посредством шарнирного соединения. Лесозаготовительная машина 1, как правило, содержит кабину 9 управления, расположенную на одной рамной части 2, 3, 4, по меньшей мере один источник 10 питания, расположенный на той же рамной части 2, 3, 4, что и кабина управления, или на другой рамной части, и предназначенный для выработки энергии для перемещения и управления лесозаготовительной машиной и/или установленными в ней инструментами. Указанная лесозаготовительная машина 1 содержит также инструменты, такие как стреловой узел 11 и захватное устройство 12, прикрепленное к указанному стреловому узлу, как показано на фиг. 1а, или харвестерную головку 13, прикрепленную к указанному стреловому узлу, как показано на фиг. 1b, которые, как правило, расположены на одной или нескольких рамных частях 2, 3, 4. Движущиеся лесозаготовительные машины 1 содержат также средства для перемещения лесозаготовительной машины, например, колеса 14, башмаки в сборе, ножные механизмы или другие хорошо известные элементы для перемещения.
На фиг. 1с схематично показана часть лесозаготовительной машины 1. Согласно варианту осуществления настоящего изобретения, представленному на указанном чертеже, лесозаготовительная машина 1 содержит рамную часть 2 и вал, установленный с возможностью вращения относительно указанной рамной части 2 вокруг продольной оси С вращения лесозаготовительной машины. Кроме того, лесозаготовительная машина 1, представленная на чертеже, содержит вторую рамную часть 4, не обладающую возможностью вращения относительно указанной рамной части 2 вокруг продольной оси С вращения лесозаготовительной машины, и способную вращаться только относительно вертикальной оси Е машины.
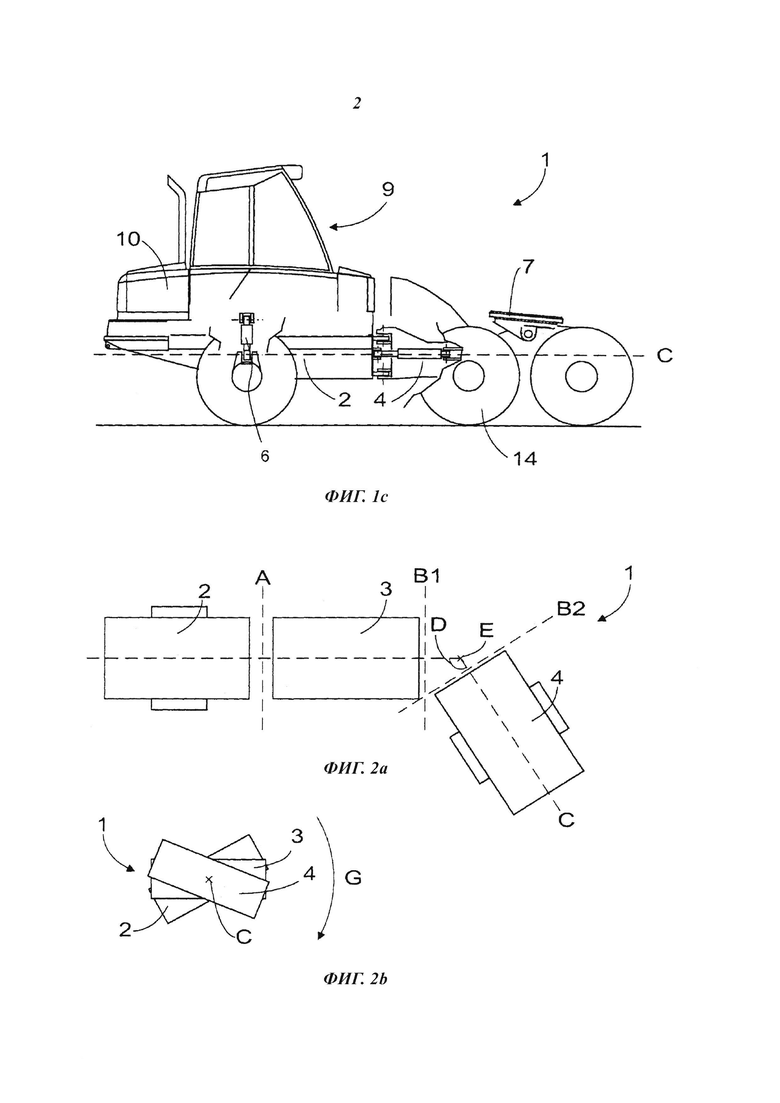
На фиг. 2а и 2b схематично, в аксонометрии показана лесозаготовительная машина 1, если смотреть сверху и с одного торца соответственно. Лесозаготовительная машина 1 может содержать по меньшей мере две (на фиг. 2а и фиг. 2b указанная лесозаготовительная машина содержит три) секции или блока, в дальнейшем называемые «рамные части 2, 3 и 4», из которых по меньшей мере две установлены с возможностью вращения относительно друг друга по существу вокруг продольной оси С вращения лесозаготовительной машины. Таким образом, согласно различным вариантам осуществления настоящего изобретения лесозаготовительная машина 1 может также содержать две рамные части или больше трех рамных частей, например, четыре рамные части, причем указанные рамные части могут представлять собой по существу последовательные части, расположенные в продольном направлении фактически существующей рамы лесозаготовительной машины 1, или по меньшей мере частично последовательные части или качающиеся оси, например, раскрытые выше. На указанных чертежах все рамные части 2, 3 и 4 показаны имеющими одинаковые размеры, хотя, как указано, на практике рамные части 2, 3 и 4 могут существенно отличаться друг от друга как по размеру, так и по другим свойствам, и/или тем, как они расположены относительно друг друга.
Иными словами, по меньшей мере две рамные части 2, 3, 4 лесозаготовительной машины 1 могут быть установлены с возможностью вращения относительно друг друга по меньшей мере вокруг оси С вращения, по существу параллельной продольной оси лесозаготовительной машины. Согласно одному из вариантов осуществления настоящего изобретения, указанная ось С вращения может представлять собой продольную ось лесозаготовительной машины 1 или ось, расположенную близко от нее, предпочтительно на максимальном расстоянии, например, около 0,5 мм, и по существу параллельную ей. В различных вариантах осуществления настоящего изобретения две рамные части 2, 3, 4 лесозаготовительной машины 1 могут, в каждом случае, быть расположены по существу последовательно в продольном направлении лесозаготовительной машины 1. В еще нескольких вариантах осуществления настоящего изобретения рамные части могут быть установлены с возможностью вращения блоками относительно друг друга и по отношению к по существу плоской контактной поверхности А, В, перпендикулярной указанной оси С вращения лесозаготовительной машины 1. Для простоты указанная контактная поверхность А, В изображена пунктирными линиями А и В также в блоках 3 и 4, показанных в аксонометрии. Таким образом, в варианте, представленном на фиг. 2а и фиг. 2b, каждая рамная часть 2, 3 и 4 может образовывать один блок в каждом случае.
Вращение, происходящее вокруг оси С вращения, может в каждом случае быть реализовано посредством любого элемента или конструкции, хорошо известных из уровня техники и обеспечивающих возможность вращения рамных частей 2, 3, относительно друг друга в указанном направлении вокруг оси С вращения, например, посредством шарнирного соединения по меньшей мере с одной степенью свободы. Такие технические решения известны, например, из публикации ЕР 1261515, причем они могут содержать, например, ось, установленную на подшипнике по меньшей мере с одного направления посредством хорошо известного подшипника, например, шарикового подшипника, другого роликового подшипника, подшипника скольжения или другого достаточно прочного подшипника.
В дополнение к конструкционным элементам, показанным на чертежах, лесозаготовительная машина 1 может содержать необходимое количество хорошо известных элементов, в том числе рамные части, устройства, системы, компоненты и другие конструкционные элементы, которые являются типичными для транспортных средств или машин, но не показаны на прилагаемых чертежах. Каждый из указанных конструкционных элементов может быть в каждом случае расположен в одной или нескольких рамных частях 2, 3, 4 или в другом конструкционном элементе лесозаготовительной машины 1.
На фиг. 1а, 1b, 1с, 2а и 2b по меньшей мере некоторые из рамных частей 2, 3, 4 оснащены колесами 5, но в других вариантах осуществления настоящего изобретения лесозаготовительная машина 1 может иметь подходящее количество колес, гусениц, полуосей тандема, гусеничных систем или других конструкционных элементов, необходимых для перемещения машины и хорошо известных из уровня техники, причем указанные конструкционные элементы в каждом случае могут быть соединены с одной или несколькими рамными частями, показанными или не показанными на чертежах. Иными словами, одно или несколько колес, гусеничных систем, полуосей тандема или других элементов могут быть скомпонованы различными способами в любой рамной части 2, 3, 4, в любой рамной части или конструкционном элементе, не показанных на чертежах, в нескольких из них или в их комбинациях. Лесозаготовительная машина 1 может также содержать рамную часть или рамные части, выполненные без колес, гусеничных систем, полуосей тандема или других подобных элементов.
На фиг. 2а схематично показана лесозаготовительная машина 1 в рабочем положении. Лесозаготовительная машина 1, показанная на чертеже, оснащена шарниром, соединяющим по меньшей мере две рамные части, в данном случае - рамные части 3 и 4, расположенные по существу последовательно в продольном направлении рамы лесозаготовительной машины 1, причем указанный шарнир обеспечивает возможность поворота вокруг по существу вертикальной оси Е вращения, проходящей по существу перпендикулярно оси С вращения лесозаготовительной машины 1, что позволяет улучшить и/или обеспечить управляемость лесозаготовительной машины 1. На чертеже рамная часть 4 повернута указанным выше образом, например, для обеспечения управления лесозаготовительной машиной 1, относительно рамной части 3 вокруг указанной по существу вертикальной оси поворота, проходящей по существу перпендикулярно оси С вращения лесозаготовительной машины 1. Величина угла поворота обозначена как D, при этом указанная ось С вращения лесозаготовительной машины 1 соответствующим образом формирует пунктирную линию, проходящую под соответствующим углом между рамными частями 3 и 4. В различных вариантах осуществления настоящего изобретения возможно использование одного или нескольких таких шарнирных соединений, обеспечивающих возможность поворота вокруг вертикальной оси поворота, при этом они в каждом случае могут быть расположены между двумя рамными частями лесозаготовительной машины 1, показанными или не показанными на чертеже. В данном случае на оси С вращения образуются углы, количество которых соответствует количеству шарниров. В различных вариантах осуществления и рабочих ситуациях рамные части 2, 3, 4 могут перемещаться относительно друг друга и оси С вращения в пределах, допускаемых зазорами и люфтами рамных частей и соединяющих их конструкций; например, они могут поворачиваться на +/-40 градусов друг относительно друга или разворачиваться на +/-45 градусов друг относительно друга.
На фиг. 2b схематично показаны три рамные части 2, 3, 4 при наблюдении с одного из торцов рамной части 4 лесозаготовительной машины 1. Показанные на фиг. 2b рамные части, находящиеся в рабочем положении или в положении перемещения, повернуты относительно друг друга таким образом, что вторая рамная часть 3 находится по существу в горизонтальном, то есть, в нейтральном положении, причем рамная часть 2 повернута против часовой стрелки по отношению ко второй рамной части 3, то есть, в направлении, противоположном стрелке G, как видно из чертежа, а рамная часть 4 повернута по часовой стрелке по отношению к рамной части 3, то есть в направлении стрелки G, как показано на указанном чертежа.
Наряду со способом и устройством для стабилизации, раскрытыми в настоящей заявке, рама, показанная на фиг. 2а и фиг. 2b и сформированная по меньшей мере из трех рамных частей 2, 3, 4, вращающихся относительно друг друга вокруг оси С вращения лесозаготовительной машины 1, обеспечивает много преимуществ по сравнению с техническими решениями, известными из уровня техники. В различных вариантах осуществления настоящего изобретения необходимая рамная часть, такая как поддерживаемая рамная часть, может быть приведена по существу в горизонтальное положение.
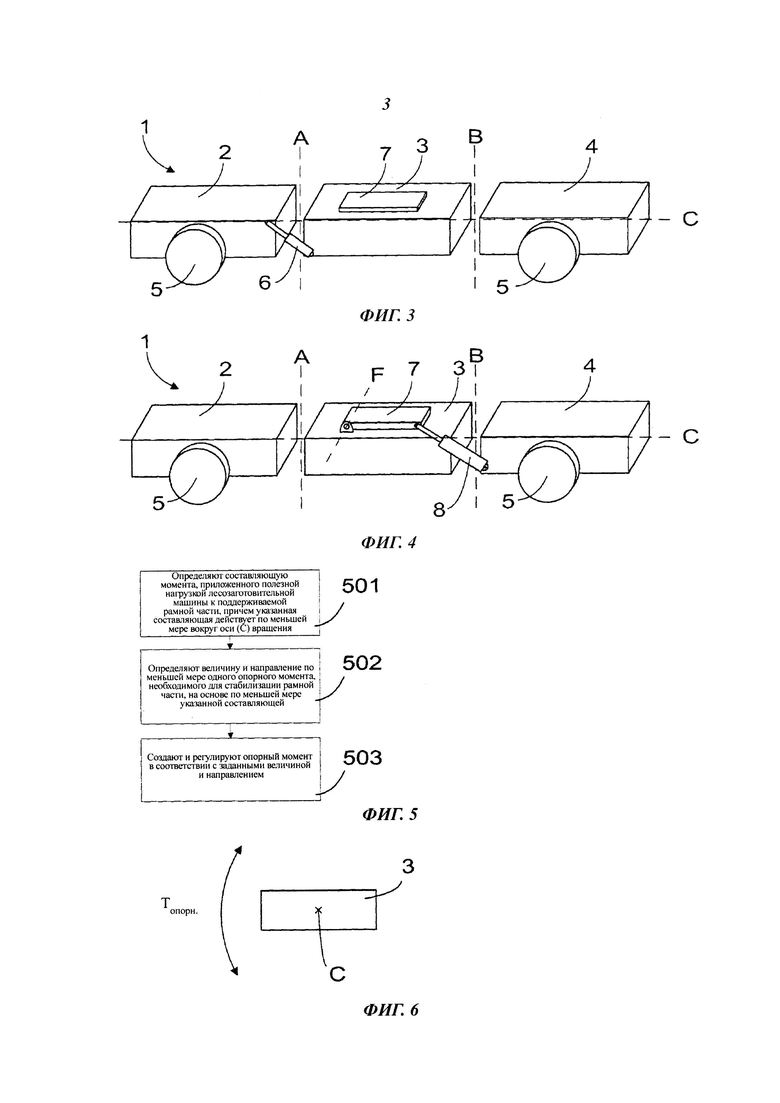
На фиг. 3 представлена лесозаготовительная машина 1, содержащая первый управляющий вращением исполнительный механизм 6, предназначенный для управления вращением между двумя рамными частями 3, 4. Указанный управляющий вращением исполнительный механизм 6 предпочтительно может представлять собой любой исполнительный механизм, используемый в транспортных средствах и/или машинах, например, исполнительный механизм, управляемый рабочей средой под давлением, такой как гидравлический цилиндр, управляемый хорошо известным способом, например, гидравлическим и/или электрическим. В различных вариантах осуществления настоящего изобретения в дополнение и/или вместо указанного первого управляющего вращением исполнительного механизма 6 может быть использовано устройство управления вращением другого типа. В зависимости от варианта осуществления настоящего изобретения на один шарнир может приходиться один или несколько указанных управляющих вращением исполнительных механизмов 6 или устройств управления вращением, причем ими можно оснастить один или несколько из указанных шарниров.
Кроме того, в варианте осуществления настоящего изобретения, представленном на фиг. 3, лесозаготовительная машина 1 содержит по меньшей мере одну монтажную конструкцию 7, в каждом случае соединенную по меньшей мере с одной рамной конструкцией и предпочтительно расположенную на верхней поверхности рамной части или вблизи от нее. В различных вариантах осуществления настоящего изобретения возможно использование нескольких указанных монтажных конструкций 7. Монтажная конструкция 7 может содержать один или несколько элементов, которые образуют участок рамной части или соединены с ней. Монтажной конструкцией 7 можно управлять, приводя ее в движение вокруг оси С вращения или оси, по существу параллельной ей, либо отдельно, либо управляя рамной частью 2, 3, 4, на которой расположена монтажная конструкция 7. Таким образом, монтажной конструкцией 7 предпочтительно можно управлять, приводя ее по существу в горизонтальное положение по отношению к поперечному повороту лесозаготовительной машины 1 вокруг оси С вращения. На монтажной конструкции 7 предпочтительно может быть расположена, например, кабина лесозаготовительной машины 1, для которой положение, как можно более устойчивое и горизонтальное в направлении вращения вокруг оси С в частности, а также в направлении вращения, по существу перпендикулярном указанной оси, вокруг поперечной оси лесозаготовительной машины 1, является предпочтительным с точки зрения производственной гигиены и техники безопасности, и/или стреловая система лесотехнической машины, для которой как можно более горизонтальное положение является предпочтительным для максимального использования имеющейся мощности, например. В различных вариантах осуществления настоящего изобретения кабина и/или кран и/или другая стреловая система лесозаготовительной машины 1, например, могут быть скомпонованы так, чтобы опираться по существу на ту же самую монтажную конструкцию 7. В других вариантах осуществления настоящего изобретения основной источник питания лесозаготовительной машины 1, такой как дизельный двигатель, а также другие требуемые компоненты силовой передачи предпочтительно могут быть, при необходимости, быть расположены на указанной монтажной конструкции 7, что может быть особенно предпочтительным, например, при работе в условиях пересеченной и/или наклонной местности. Соответственно, в некоторых вариантах осуществления настоящего изобретения рамная часть 2, 3, 4, на которой расположена монтажная конструкция 7, может представлять собой поддерживаемую рамную часть. С другой стороны, в других вариантах осуществления настоящего изобретения рамная часть 2, 3, 4, на которой расположена монтажная конструкция 7, может представлять собой поддерживающую рамную часть, или лесозаготовительная машина 1 может содержать несколько монтажных конструкций 7, расположенных на поддерживающей рамной части и/или поддерживаемой рамной части. Например, согласно одному из вариантов осуществления настоящего изобретения, поддерживающая рамная часть может содержать монтажную конструкцию 7, на которой может быть установлена кабина, например, а поддерживаемая рамная часть может содержать вторую монтажную конструкцию (не показана), на которой может быть предусмотрен, например, стреловой узел, грузовое пространство и/или другая аналогичная конструкция, формирующая или принимающая полезную нагрузку.
На фиг. 4 показан вариант осуществления настоящего изобретения, в котором монтажная конструкция 7 оснащена вторым управляющим вращением исполнительным механизмом 8, предназначенным для направленного перемещения положения монтажной конструкции относительно угла наклона в направлении оси С вращения лесозаготовительной машины путем вращательного движения, направленного вокруг оси F, проходящей по существу перпендикулярно направлению оси С вращения. Указанный второй управляющий вращением исполнительный механизм 8 может в данном варианте быть использован также для управления вращением, происходящим относительно поворотной плоскости В. Указанный исполнительный механизм может представлять собой, например, исполнительный механизм, управляемый рабочей средой под давлением, такой как гидравлический цилиндр, электрический привод, формирующий линейное перемещение, или другой исполнительный механизм, пригодный для выполнения данной задачи. В других вариантах осуществления настоящего изобретения на одной монтажной конструкции 7 может быть предусмотрен один или несколько вторых управляющих вращением исполнительных механизмов 8. В других вариантах осуществления настоящего изобретения указанный второй управляющий вращением исполнительный механизм 8 можно заменить одной или несколькими системами другого типа, позволяющими поворачивать монтажную конструкцию 7 относительно рамной части 3 вокруг оси F и управлять вращением рамных частей 3, 4 вокруг оси С вращения. При этом рамная часть 2, например, может представлять собой поддерживающую рамную часть, а рамные части 3 и 4 могут представлять собой поддерживаемые рамные части.
На фиг. 5 схематично проиллюстрирован способ стабилизации по меньшей мере одной рамной части 2, 3, 4 лесозаготовительной машины 1. Способ содержит этап 501, на котором определяют составляющую Тпол.нагр.Х, которая является составляющей момента Тпол.нагр., приложенного к рамной части 2, 3, 4 полезной нагрузкой лесозаготовительной машины 1, и действует по меньшей мере вокруг продольной оси машины. В некоторых вариантах осуществления настоящего изобретения возможно также определение составляющих момента, приложенного к поддерживаемой рамной части полезной нагрузкой, которые действуют в других направлениях, например составляющих, действующих вокруг поперечной оси лесозаготовительной машины или оси, по существу параллельной ей, и/или составляющих, которые действуют вокруг по существу вертикальной оси. Кроме того, способ, проиллюстрированный на фиг. 5, содержит этап 502, на котором по меньшей мере на основе указанной составляющей Тпол.нагр.Х определяют величину и направление по меньшей мере одного опорного момента Топорн., необходимого по меньшей мере для стабилизации рамной части, а также этап 503, на котором в соответствии с вычисленными величиной и направлением регулируют опорный момент Топорн. В различных вариантах осуществления настоящего изобретения момент, приложенный по меньшей мере к одной поддерживаемой рамной части полезной нагрузкой, Тпол.нагр. можно определить, например, посредством некоторых перечисленных ниже способов и/или их комбинаций. Момент можно определить путем прямого измерения момента датчиком момента и/или путем прямого или непрямого измерения сил и плечей пары сил и вычисления вектора. Кроме того, момент можно определить путем оценки его на основе, например, моделирования механических и/или динамических свойств лесозаготовительной машины и/или полезной нагрузки и/или положения и/или оценки состояния движения системы управления лесозаготовительной машины, или путем использования какой-либо другой модели, позволяющей оценить момент. Можно также определять момент как комбинацию перечисленных выше измерений, данных, расчетных значений и/или способов, или за счет использования других аналогичных средств.
Как правило, наиболее предпочтительный опорный момент Топорн. представляет собой наименьший опорный момент, достаточный для стабилизации поддерживаемой рамной части и/или рамы лесозаготовительной машины. С другой стороны, как указано в предыдущем примере, для машин, у которых кабина управления находится, например, на поддерживаемой раме, модель управления, эффективно стабилизирующая поддерживаемую раму, может быть направлена на создание модели, обеспечивающей для поддерживаемой рамы более высокий опорный момент, чем возможен при использовании жесткого фиксатора рамы. В данном случае задача состоит не в получении наименьшего возможного опорного момента, но в наиболее эффективной стабилизации, возможной для поддерживаемой опорной части. Таким образом, в различных вариантах осуществления настоящего изобретения наиболее предпочтительный опорный момент может представлять собой, в зависимости от цели стабилизации и рабочей ситуации, любой момент между наименьшим возможным моментом и опорным моментом, компенсирующим момент, приложенный к поддерживаемой раме полезной нагрузкой. В других вариантах осуществления настоящего изобретения предлагаемый способ может также предусматривать определение по меньшей мере одного положения и/или состояния движения поддерживаемой рамной части, например. Согласно некоторым вариантам осуществления настоящего изобретения предлагаемый способ может предусматривать определение положения и/или состояния движения более чем одной рамной части, например, по меньшей мере одной поддерживающей рамной части и по меньшей мере одной поддерживаемой рамной части.
Согласно некоторым вариантам осуществления настоящего изобретения требуемый опорный момент Топорн. создают и регулируют в соответствии с заданными величиной и направлением. Опорный момент можно создать посредством по меньшей мере одного исполнительного механизма, например, который можно использовать для создания предварительно заданного момента по меньшей мере в одном нужном направлении, при этом по меньшей мере один исполнительный механизм может быть заблокирован в своем текущем положении для предотвращения вращения рамных частей относительно друг друга.
В некоторых вариантах осуществления настоящего изобретения указанную одну или несколько рамных частей можно также подвергать анализу устойчивости на основе момента, приложенного к рамной части указанными положениями и/или состояниями движения и указанной полезной нагрузкой. Это позволяет при необходимости выбирать рабочее состояние лесозаготовительной машины среди предварительно заданных альтернативных вариантов на основе указанного анализа устойчивости. Согласно некоторым вариантам осуществления настоящего изобретения указанные альтернативные варианты рабочего состояния могут предусматривать по меньшей мере одно из следующих рабочих состояний: активную стабилизацию, блокировку взаимного положения рамных частей, остановку движения и выдачу сигнала предупреждения пользователю о приближении крайнего положения и/или о моменте времени, когда такое крайнее положение достигнуто.
На фиг. 6 схематично проиллюстрирован пример опорного момента рамной части для случая опорного момента рамной части 3 в ситуации, показанной на фиг. 2b, например. Величина и направление опорного момента Топорн. предпочтительно определены так, что опорный момент по меньшей мере равен первому предельному моменту Тмин, который равен моменту, достаточному для предотвращения падения стабилизируемой рамной части 2, 3, 4 в сторону, куда она стремится упасть или наклониться без опорного момента. Иными словами, направление опорного момента Топорн. предпочтительно определяют в соответствии со стороной, в которую поддерживаемая рамная часть 2, 3, 4 стремилась бы упасть или наклониться без опорного момента. Таким образом, направление опорного момента Топорн. выбирают противоположным моменту, стремящемуся вызвать падение рамной части 2, 3, 4, например, противоположным моменту, создаваемому в боковом направлении силой тяжести. Однако, опорный момент должен быть меньше второго предельного момента Тмакс, который, самое большее, равен одному из следующих, меньших моментов: моменту, вызывающему падение поддерживаемой рамной части 2, 3, 4 в направлении, в котором действует опорный момент, или моменту, заставляющему поддерживающую раму 2, 3, 4 потерять свою устойчивость. На фиг. 6 представлен пример, иллюстрирующий составляющую опорного момента, действующую вокруг оси С вращения, хотя в других вариантах осуществления настоящего изобретения можно определять и/или создавать один или несколько опорных моментов Топорн., причем опорный момент может также иметь другое направление и/или содержать составляющие, действующие в нескольких направлениях.
На практике часто предпочтительным является создание как можно меньшего опорного момента, который в то же время достаточно велик, чтобы сохранять устойчивость обеих рам. В данном случае конструкции не подвергаются ненужной нагрузке, при этом как поддерживающая, так и поддерживаемая рамные части остаются устойчивыми. Однако оптимальный опорный момент может изменяться в соответствии с оптимизируемым элементом, поскольку, когда оптимизируется механическое напряжение, воздействующее на конкретную рамную часть, например, на поддерживающую или поддерживаемую рамную часть, оптимальный опорный момент может быть больше.
Согласно различным вариантам осуществления настоящего изобретения опорный момент Топорн. может быть создан по меньшей мере одним исполнительным механизмом. Согласно одному из вариантов осуществления настоящего изобретения указанный опорный момент Топорн. может быть создан по меньшей мере одним исполнительным механизмом, используемым для создания предварительно заданного момента по меньшей мере в одном необходимом направлении. Согласно одному из вариантов осуществления настоящего изобретения указанный опорный момент Топорн. может быть создан по меньшей мере двумя исполнительными механизмами, каждый из которых можно использовать для создания момента по меньшей мере в одном направлении. Согласно другому варианту осуществления настоящего изобретения указанный опорный момент Топорн. может быть создан по меньшей мере одним исполнительным механизмом, используемым для создания момента по меньшей мере в двух направлениях, противоположных друг другу. Таким образом, указанные исполнительные механизмы можно использовать для создания общего опорного момента, имеющего величину и направление, соответствующие требуемому опорному моменту Топорн.. В различных вариантах осуществления настоящего изобретения указанный один или несколько исполнительных механизмов можно также блокировать в их текущих положениях для предотвращения вращения рамных частей относительно друг друга.
В различных вариантах осуществления настоящего изобретения рамные части 2, 3, 4 могут также подвергаться анализу устойчивости путем применения указанных выше положений и/или состояний движения, при этом указанный выше момент и рабочее состояние лесозаготовительной машины можно выбирать среди предварительно заданных альтернативных вариантов на основе результатов указанного анализа устойчивости. При анализе устойчивости можно также использовать механические свойства лесозаготовительной машины и ее рамных частей, влияющие на устойчивость, например, механическую модель лесозаготовительной машины и/или ее рамной части или частей и/или их измерения. В зависимости от варианта осуществления настоящего изобретения указанный анализ устойчивости можно выполнять, учитывая, для упрощения, только одну составляющую момента, действующую вокруг оси С вращения, и/или по меньшей мере составляющую момента, действующую вокруг поперечной оси лесозаготовительной машины, и/или составляющие, действующие вокруг по существу вертикальной оси. В других вариантах осуществления настоящего изобретения альтернативные варианты рабочего состояния могут включать в себя по меньшей мере активную стабилизацию и блокировку взаимного положения рамных частей и/или выдачу сигнала предупреждения пользователю о приближении крайнего положения и/или о моменте времени, когда такое крайнее положение достигнуто. В данном случае понятие «крайнее положение» относится к предельному значению устойчивости, при котором вся лесозаготовительная машина начинает падать или оказывается в непосредственной опасности падения. Указанное крайнее положение может также представлять собой положение или ситуацию, при которой опорный момент, необходимый для стабилизации поддерживаемой опорной части, по существу равен наибольшему опорному моменту, который может быть получен в рассматриваемом положении и состоянии движения. В других случаях альтернативные варианты рабочего состояния могут также включать в себя остановку движения. Остановка движения может понадобиться, например, в ситуации, когда требуется заблокировать вращение рамных частей друг относительно друга в конкретном положении. «Остановка движения» относится к устройству, позволяющему предотвратить запуск лесозаготовительной машины и/или, при необходимости, остановить движение лесозаготовительной машины.
Способ, раскрытый в настоящем описании со ссылкой на фиг. 5, можно реализовать посредством устройства, связанного с лесозаготовительной машиной, имеющей раму, которая может быть аналогична той, что раскрыта в настоящем описании со ссылкой на фиг. 1а-4, например. Согласно одному из вариантов осуществления настоящего изобретения указанный опорный моменте таком случае может быть создан по меньшей мере одним исполнительным механизмом, причем исполнительный механизм или исполнительные механизмы можно использовать для создания предварительно заданного момента по меньшей мере в одном необходимом направлении. В различных вариантах осуществления настоящего изобретения исполнительный механизм можно также блокировать в его текущем положении для предотвращения вращения рамных частей друг относительно друга.
Согласно некоторым вариантам осуществления настоящего изобретения положение и/или состояние движения одной или нескольких рамных частей лесозаготовительной машины 1, предпочтительно по меньшей мере одной поддерживаемой рамной части, можно определять, используя в каждом случае по меньшей мере один датчик, например, датчик ускорения или измеритель угла наклона. В некоторых вариантах осуществления настоящего изобретения в дополнение к датчику ускорения можно также использовать по меньшей мере один датчик угловой скорости.
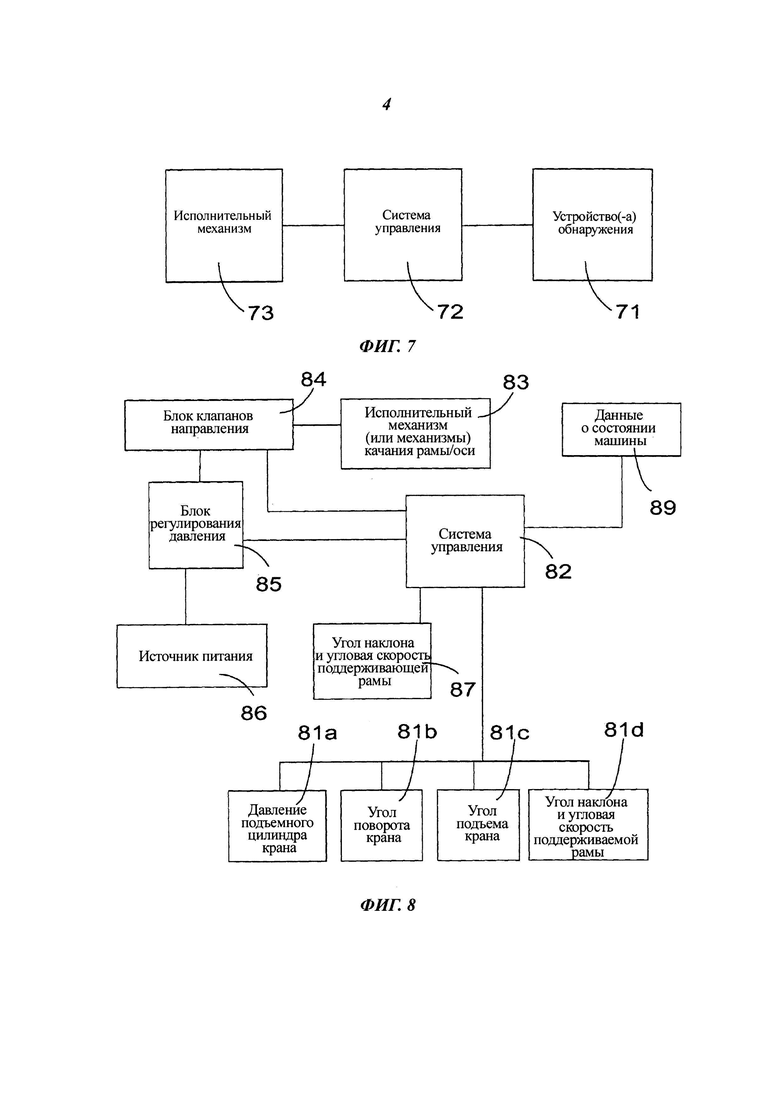
На фиг. 7 схематично показано устройство для стабилизации по меньшей мере одной рамной части 2, 3, 4 лесозаготовительной машины 1. Указанное устройство содержит по меньшей мере средство 71 обнаружения, предназначенное для обнаружения момента, вызываемого полезной нагрузкой или полезными нагрузками, по меньшей мере составляющей по меньшей мере указанного момента, действующей по меньшей мере вокруг оси С вращения. Кроме того, указанное устройство содержит блок или систему 72 управления для определения величины и направления по меньшей мере одного опорного момента, необходимого по меньшей мере для стабилизации одной рамной части 2, 3, 4 на основе по меньшей мере составляющей момента, вызванного указанной полезной нагрузкой. Указанное устройство содержит также по меньшей мере один исполнительный механизм 73 для создания и регулирования опорного момента.
На фиг. 8 схематично проиллюстрирован вариант осуществления способа стабилизации по меньшей мере одной рамной части 2, 3, 4 лесозаготовительной машины 1, причем устройство управления вращением содержит исполнительные механизмы 83, такие как исполнительные механизмы, управляемые рабочей средой под давлением, например, гидравлические цилиндры. В указанном случае устройство управления вращением может осуществлять управление давлением и направлением посредством блока 84 регулирующих клапанов, такого как блок клапанов направления, управляющий направлением момента, и посредством блока 85 регулирования давления, регулирующего величину момента посредством давления. Блок управления давлением и направлением может содержать несколько отдельных компонентов, например, блок 84 регулирующих клапанов и блок 85 регулирования давления, как показано на фиг. 8, или один интегральный компонент. Блок 84 регулирующих клапанов может содержать четырехпутевой трехпозиционный клапан направления, например, предпочтительно с закрытым средним положением, а блок 85 регулирования давления может содержать пропорциональный клапан, имеющий соединение обратной связи по давлению и подключенный к клапану направления, например. В указанном случае закрытое среднее положение клапана направления обеспечивает возможность блокировки цилиндров, в результате чего закрывается выход клапана регулирования давления, что позволяет снизить давление в системе, регулируемое клапаном регулирования давления, для экономии энергии. Закрытое среднее положение можно также использовать, например, при диагностике неисправностей клапана регулирования давления и датчика давления, контролирующего его работу, при этом в ситуации неисправности водитель может быть предупрежден об эксплуатационном нарушении, а стабилизация функциональных характеристик может быть предотвращена при необходимости. На фиг. 8 показан также источник 86 питания для всего устройства.
В ситуации обеспечения опоры, когда управление устройством регулирования вращения осуществляется в зависимости от давления, шарнир 17 рамы может поворачиваться вокруг продольной оси без резкого изменения давления. Таким образом, опорный момент можно поддерживать также при вождении по неровному грунту. Если грунт проваливается под колесами в неподвижном состоянии, рамы занимают новое положение равновесия без чрезмерной нагрузки на шарнир рамы, которая возникла бы при жестком управлении вращением. Поскольку реальный опорный момент повторяет требуемый момент в реальном времени, опорный момент изменяется равномерно и никаких разрывов при этом не появляется, как происходило бы в случае реализации традиционного фиксатора рамы.
Положение и состояние движения поддерживаемой рамной части 2, 3, 4 и/или поддерживающей рамной части относительно ускорения, вызванного вектором тяготения, и, в частности, ее направление можно определить, например, путем измерения угла наклона и угловой скорости 81d, 87 поддерживаемой и/или поддерживающей рамной части, выполняемого, например, датчиком скорости, измерителем угла наклона и/или датчиком угловой скорости, причем на основе полученной информации посредством блока или системы 72, 82 управления можно определить воздействие положения рамных частей на опорный момент. Полезная нагрузка может состоять из подвижного стрелового узла лесозаготовительной машины и/или груза, поднимаемого с его помощью. Момент, вызываемый выполняемыми стрелой операциями, можно оценивать с достаточной точностью на основе давления 81а подъемного цилиндра стрелового узла и данных 81b, 81с о положении стрелового узла и основания 15 стрелового узла, например. Другой способ вычисления момента, вызванного стреловым узлом и/или какой-либо другой полезной нагрузкой, такой как груз (при его наличии) заключается в его вычислении на основе давлений цилиндра (4-хточечное измерение) и положения основания, наклоняемого в двух направлениях, или путем отдельного измерения силовой нагрузки на основание, например, посредством штыревых датчиков и/или тензодатчиков.
Однако опорный момент предпочтительно не увеличивают до превышения второго предельного момента Тмакс. При слишком большом увеличении момента поддерживающая рама в конце концов упадет. Если водитель сидит на поддерживаемой раме, он необязательно может определить, что поддерживающая рама может вскоре упасть. По этой причине активно регулируемый опорный момент ограничивают предохранительным клапаном.
В способе и устройстве стабилизации может также быть учтено рабочее состояние 89 лесозаготовительной машины. В дополнение или вместо этого, рамные части могут также при необходимости быть подвергнуты анализу устойчивости на основе указанных выше положений и/или состояний движения и указанного выше момента, вызываемого на рамной части полезной нагрузкой, при этом новое рабочее состояние лесозаготовительной машины можно при необходимости выбирать среди предварительно заданных альтернативных вариантов, исходя из результатов указанного анализа устойчивости. Возможные рабочие состояния такого типа рассматривались выше со ссылкой на фиг. 6, например.
Если вычисленный опорный момент превышает второй предельный момент Тмакс, когда лесозаготовительная машина неподвижна, вращением рамы можно управлять путем управления шарниром рамы, усиливаемым традиционным способом посредством запорных клапанов, например, причем вся масса лесозаготовительной машины полностью участвует в ее стабилизации. Это значительно повышает устойчивость и безопасность лесозаготовительной машины, поскольку в данном случае водитель обращает внимание на неустойчивость при наклоне всей лесозаготовительной машины, поведение которой на жестком шарнире рамы является логически последовательным. При этом вращение можно блокировать до тех пор, пока необходимый опорный момент не уменьшится немного ниже второго предельного момента Тмакс. Когда вращение будет снова разблокировано, управляющие вращением исполнительные механизмы могут вернуться к активной стабилизации.
Для ситуаций, когда требуемый опорный момент превышает второй предельный момент Тмакс во время вождения, пороговое значение предварительно заданного опорного момента можно определить для давления цилиндров фиксатора рамы, поскольку блокировать вращение рамы во время движения нецелесообразно, при этом нельзя также увеличить опорный момент для обеспечения устойчивости поддерживающей рамной части. Однако поведение лесозаготовительной машины логично и является результатом собственных действий водителя, в результате чего водитель может предотвратить потерю устойчивости и падение поддерживающей рамной части. Кроме того, в раскрытых вариантах осуществления настоящего изобретения момент, требующийся для падения рамной части, значительно выше, чем при использовании традиционных так называемых фиксаторов рамы. Соответствующие функциональные возможности могут также быть реализованы посредством исполнительного механизма какого-либо другого типа, например, электрических исполнительных механизмов.
В приведенных выше случаях, когда требуемый опорный момент приближается к значению второго предельного момента Тмакс, достигает или превышает его, система управления может быть выполнена с возможностью определения неустойчивости в рамных частях. Это позволяет предупредить водителя о приближающейся потенциально опасной ситуации при помощи аудиовизуальных средств, например. Кроме того, в других вариантах осуществления настоящего изобретения можно предусмотреть предотвращение падения лесозаготовительной машины во время вождения или ее принудительную остановку, если требуемый опорный момент приближается к значению второго предельного момента Тмакс. В дополнение к этому, в других вариантах осуществления настоящего изобретения можно предусмотреть предотвращение запуска, если будет предпринята попытка привести лесозаготовительную машину в движение, когда требуемый опорный момент равен или превышает второй предельный момент Тмакс. В данном случае вождение может быть разрешено только после того, как водитель переместит стреловой узел ближе к продольной оси лесозаготовительной машины, например.
Раскрытые способ и устройство стабилизации можно также использовать в других лесозаготовительных машинах, например, форвардерах, если момент, вызванный грузом, можно измерить посредством грузовых весов, например. Кроме того, раскрытые выше способ и устройство, очевидно, можно использовать также в других соответствующих рабочих машинах, работающих на неровном грунте и содержащих по меньшей мере две рамные части, которые могут вращаться относительно друг друга.
Рамные части 2, 3, 4 для упрощения показаны на чертежах отдельными друг от друга, при этом конструкционные элементы, соединяющие их, в большинстве случаев не показаны на чертежах. Очевидно, последовательно расположенные конструкционные элементы могут в каждом случае быть соединены друг с другом посредством конструкционных элементов или конструкций, обеспечивающих реализацию признаков независимых пунктов формулы изобретения.
Исполнительные механизмы, раскрытые в различных вариантах осуществления настоящего изобретения, например, первый управляющий движением исполнительный механизм 6 и/или второй управляющий движением исполнительный механизм 8, можно заменить шарнирным исполнительным механизмом, например, силовым приводом поворотного крыла, или каким-либо другим поворотным электродвигателем или аналогичным устройством, создающим принудительное движение, или другим подобным устройством, известным из уровня техники и подходящим для данной задачи.
Специалисту понятно, что, по мере развития технологии, основную идею настоящего изобретения можно будет реализовать многими различными способами. Таким образом, настоящее изобретение и варианты его осуществления не ограничиваются приведенными выше примерами, но могут различаться в пределах формулы изобретения.
Изобретения относятся к транспортной технике, в частности к системам стабилизации лесозаготовительных машин. Настоящее изобретение относится к способу стабилизации по меньшей мере одной рамной части лесозаготовительной машины, содержащему этапы, на которых: определяют момент, приложенный полезной нагрузкой лесозаготовительной машины к поддерживаемой рамной части, и на основе момента, приложенного полезной нагрузкой к поддерживаемой рамной части, определяют величину и направление по меньшей мере одного опорного момента, необходимого по меньшей мере для стабилизации рамной части. Кроме того, настоящее изобретение относится к устройству для стабилизации по меньшей мере одной рамной части лесозаготовительной машины, содержащему средства для выполнения указанных вычислений. 3 н. и 21 з.п. ф-лы, 11 ил. 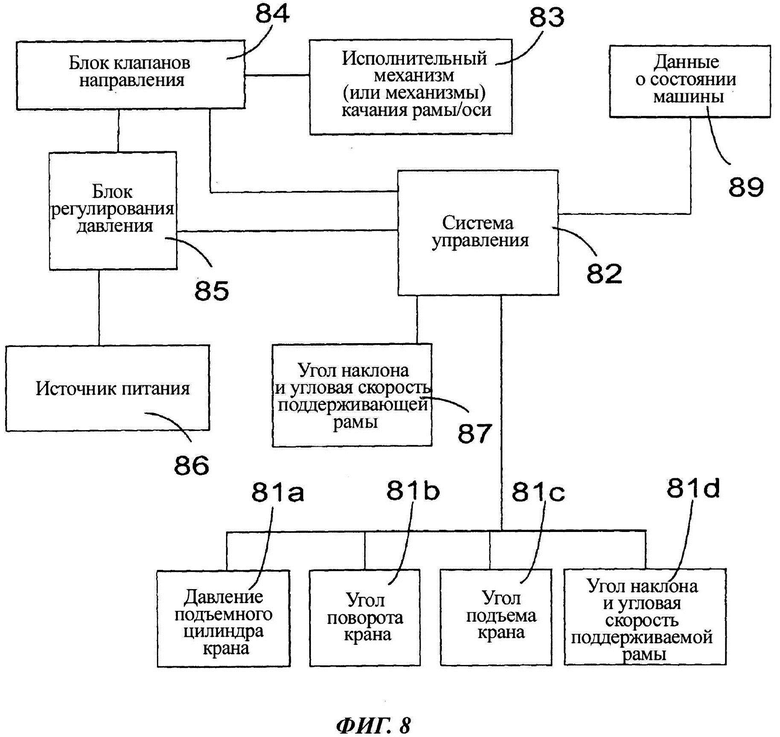
1. Способ стабилизации по меньшей мере одной рамной части лесозаготовительной машины, отличающийся тем, что содержит этапы, на которых:
определяют составляющую момента, приложенного полезной нагрузкой к поддерживаемой рамной части лесозаготовительной машины, причем указанная составляющая действует относительно по меньшей мере по существу продольной оси вращения лесозаготовительной машины; и
на основе по меньшей мере момента, приложенного полезной нагрузкой к поддерживаемой рамной части, определяют величину и направление по меньшей мере одного опорного момента, необходимого для стабилизации по меньшей мере указанной рамной части.
2. Способ по п. 1, отличающийся тем, что определяют также ту составляющую момента, приложенного полезной нагрузкой к поддерживаемой рамной части, которая действует относительно поперечной оси лесозаготовительной машины.
3. Способ по п. 1, отличающийся тем, что создают и регулируют требуемый опорный момент в соответствии с предварительно заданной величиной и направлением.
4. Способ по п. 1, отличающийся тем, что опорный момент создают посредством по меньшей мере одного исполнительного механизма, выполненного с возможностью приложения предварительного заданного момента в нужном направлении, и блокируют указанный по меньшей мере один исполнительный механизм в его текущем положении для предотвращения вращения рамных частей относительно друг друга.
5. Способ по п. 1, отличающийся тем, что определяют положение и/или состояние движения по меньшей мере одной поддерживающей рамной части лесозаготовительной машины и по меньшей мере одной поддерживаемой рамной части по отношению к ускорению, вызванному вектором тяготения; и определяют величину и направление по меньшей мере одного опорного момента, необходимого по меньшей мере для стабилизации рамной части, на основе по меньшей мере указанных положений и/или состояний движения и указанной составляющей момента, приложенного полезной нагрузкой к поддерживаемой рамной части, причем указанная составляющая действует относительно по меньшей мере по существу продольной оси вращения.
6. Способ по п. 5, отличающийся тем, что также выполняют анализ устойчивости рамных частей на основе указанных положений и/или состояний движения и указанного момента и выбирают на основе результатов указанного анализа устойчивости рабочее состояние лесозаготовительной машины среди предварительно заданных альтернативных вариантов.
7. Способ по п. 6, отличающийся тем, что указанные альтернативные варианты рабочего состояния включают в себя по меньшей мере активную стабилизацию и блокировку положения рамных частей друг относительно друга.
8. Способ по п. 6, отличающийся тем, что указанные альтернативные варианты рабочего состояния также включают в себя остановку движения.
9. Способ по п. 6, отличающийся тем, что указанные альтернативные варианты рабочего состояния включают в себя по меньшей мере выдачу сигнала предупреждения водителю о приближении крайнего положения и/или о моменте времени, когда крайнее положение достигнуто.
10. Устройство для стабилизации по меньшей мере одной рамной части лесозаготовительной машины, отличающееся тем, что содержит по меньшей мере:
средства для определения составляющей момента, приложенного полезной нагрузкой лесозаготовительной машины к поддерживаемой рамной части, причем указанная составляющая действует относительно по меньшей мере по существу продольной оси вращения лесозаготовительной машины; и
средства для определения на основе по меньшей мере момента, приложенного полезной нагрузкой к поддерживаемой рамной части, величины и направления по меньшей мере одного опорного момента, необходимого для стабилизации по меньшей мере указанной рамной части.
11. Устройство по п. 10, отличающееся тем, что дополнительно содержит средства для создания требуемого опорного момента и его регулирования в соответствии с предварительно заданными величиной и направлением.
12. Устройство по п. 11, отличающееся тем, что указанные средства для создания и регулирования требуемого опорного момента содержат по меньшей мере один исполнительный механизм, выполненный с возможностью создания предварительно заданного момента по меньшей мере в одном необходимом направлении, причем указанный по меньшей мере один исполнительный механизм выполнен с возможностью блокировки в своем текущем положении для предотвращения вращения рамных частей относительно друг друга.
13. Устройство по п. 10, отличающееся тем, что дополнительно содержит средства для определения положения и/или состояния движения по меньшей мере одной поддерживаемой рамной части по отношению к ускорению, вызванному силой тяжести, и средства для определения величины и направления по меньшей мере одного опорного момента, необходимого по меньшей мере для стабилизации рамной части, на основе составляющей момента, приложенного к поддерживаемой рамной части полезной нагрузкой, причем указанная составляющая действует относительно по меньшей мере по существу продольной оси вращения.
14. Устройство по п. 13, отличающееся тем, что дополнительно содержит средства для выполнения анализа устойчивости рамных частей на основе данных о положениях и/или состояниях движения и указанного момента, и для выбора рабочего состояния лесозаготовительной машины среди предварительно заданных альтернативных вариантов на основе результатов указанного анализа устойчивости.
15. Устройство по п. 14, отличающееся тем, что указанные альтернативные варианты рабочего состояния включают в себя по меньшей мере активную стабилизацию и блокировку взаимного положения рамных частей.
16. Устройство по п. 14, отличающееся тем, что указанные альтернативные варианты рабочего состояния также включают в себя остановку движения.
17. Устройство по п. 14, отличающееся тем, что указанные альтернативные варианты рабочего состояния включают в себя выдачу сигнала предупреждения водителю о приближении крайнего положения и/или о моменте времени, когда крайнее положение достигнуто.
18. Устройство по п. 13, отличающееся тем, что указанные средства для определения положения по меньшей мере одной поддерживаемой рамной части и/или состояния движения по отношению к ускорению, вызванному вектором тяготения, содержат по меньшей мере один датчик.
19. Устройство по п. 18, отличающееся тем, что указанный датчик представляет собой датчик ускорения или измеритель угла наклона.
20. Устройство по п. 18, отличающееся тем, что указанный датчик представляет собой датчик угловой скорости.
21. Устройство по п. 10, отличающееся тем, что указанные средства для определения той составляющей момента, приложенного полезной нагрузкой к поддерживаемой рамной части лесозаготовительной машины, которая действует относительно по меньшей мере оси вращения, предусматривают выполнение по меньшей мере: измерения шарнирного угла поворота стрелового узла, измерения мощности подъемного цилиндра и измерения шарнирного угла в сочленении между основанием стрелового узла и подъемным цилиндром.
22. Устройство по п. 10, отличающееся тем, что указанные средства для определения величины и направления по меньшей мере одного опорного момента, необходимого по меньшей мере для стабилизации рамной части, содержат по меньшей мере блок управления.
23. Устройство по п. 14, отличающееся тем, что указанные средства для выполнения анализа устойчивости рамных частей и для выбора рабочего состояния лесозаготовительной машины содержат по меньшей мере блок управления.
24. Лесозаготовительная машина, отличающаяся тем, что содержит устройство по п. 10.
| US 3565273 A, 23.03.1971 | |||
| WO 03055735 A1, 10.07.2003 | |||
| EP 1378483 A1, 07.01.2004 | |||
| СПОСОБ ФОРМИРОВАНИЯ ПРОТОЧНОГО ЖИДКОСТНОГО ПОРШНЯ ДЛЯ СЖАТИЯ И ПЕРЕКАЧКИ ГАЗА ИЛИ ГАЗОЖИДКОСТНЫХ СМЕСЕЙ | 2005 |
|
RU2298689C2 |
| СТАБИЛИЗИРУЮЩАЯ И РАСКРЕПЛЯЮЩАЯ СИСТЕМА, А ТАКЖЕ УДЕРЖИВАЮЩАЯ И ПОЗИЦИОНИРУЮЩАЯ СИСТЕМА ДЛЯ УДЕРЖАНИЯ И ПОЗИЦИОНИРОВАНИЯ СТРЕЛЫ СЕЛЬСКОХОЗЯЙСТВЕННОЙ МАШИНЫ | 2005 |
|
RU2396745C2 |

