Область техники, к которой относится изобретение
Настоящее изобретение относится к системе, предложенной в ограничительной части п. 1 формулы изобретения, для обеспечения возможности вращательного движения в транспортном средстве или передвижной рабочей машине.
Настоящее изобретение также относится к способу, предложенному в ограничительной части п. 19 формулы изобретения, для обеспечения возможности вращательного движения в транспортном средстве или передвижной рабочей машине.
Уровень техники
Различные транспортные средства и передвижные рабочие машины часто вынуждены выполнять множество операций на неровных поверхностях, а также на поверхностях, имеющих уклон; при этом важно, чтобы ходовые элементы, такие как колеса и/или гусеницы транспортного средства или передвижной рабочей машины имели достаточный контакт с грунтом. Хороший контакт с грунтом или иной рабочей поверхностью гарантирует для транспортного средства, например, возможность движения вперед или возможность приведения в движение, а также хорошее сцепление между рабочей поверхностью и транспортным средством или рабочей машиной. Это также гарантирует низкое давление на рабочую поверхность и хорошую устойчивость. Характеристики подобные указанным особенно отчетливо выражены для транспортных средств или рабочих машин, предназначенных для эксплуатации во внедорожных условиях.
Вышеупомянутые характеристики можно улучшить, например, если обеспечить возможность относительного вращения осей, узлов осей, или - особенно в случае шарнирно-сочлененной рабочей машины или рабочей машины, управляемой посредством колес - секций шарнирно-сочлененной рамы.
Одним значимым применением для такого технического решения является система стабилизации, например, успокоения поперечного качания грузового пространства шарнирно-сочлененного транспортного средства. Одну группу таких транспортных средств можно найти среди лесозаготовительных машин, в которых перевозимый груз часто подвержен длительным меняющимся колебаниям работающей машины. В результате таких колебаний нарушается устойчивость работающей машины. В случае лесозаготовительной машины, а особенно погрузочно-транспортной машины (форвардера), прежде всего надо понимать, что самыми неблагоприятными движениями являются движения поперек продольной оси такой машины, так называемые движения бокового раскачивания. Типичной причиной бокового раскачивания является ситуация, когда колесо, гусеница или шина тележки с одной стороны машины переезжает через высокое препятствие, например, валун или пень, или соответственно, шина пересекает яму. Такие колебания тем сильнее, чем ухабистей рельеф, и чем выше скорость движения транспортного средства.
Такие колебания транспортного средства или рабочей машины влияют не только на ее устойчивость, но также на удобство эксплуатации в зависимости от рельефа или эксплуатации во внедорожных условиях. За счет демпфирования колебаний может быть увеличена скорость вождения, т.е. основной фактор, который влияет на производительность.
Вышеупомянутые недостатки традиционно преодолевают путем замены двухколесной оси на специальную качающуюся ось тележки (ось подвески типа rocker-bogie), которая за счет эффекта рычага между колесами в некоторой степени стабилизирует колебания транспортного средства и рабочей машины в результате того, что подвеска типа rocker-bogie имеет тенденцию вдвое уменьшать колебание, вызываемое каждым препятствием.
Дополнительно к оси подвески типа rocker-bogie, предпринимались и предпринимаются попытки найти решение по устранению вышеупомянутых недостатков путем создания, в машине с двумя рамами, опоры для рамы, которая качается из-за неровностей грунта, и таким образом нуждается в опоре, со стороны второй, опорной рамы. Такое решение стабилизирует работающую машину за счет распределения нагрузок между указанными рамами. Но такому решению свойственно ограничение, когда имеет место значительная разница масс указанных рам. Так, более легкая рама не способна во всех случаях стабилизировать колебания более тяжелой рамы.
Раскрытие сущности изобретения
Следовательно, задача настоящего изобретения заключается в создании системы и способа, посредством которых могут быть по меньшей мере смягчены вышеупомянутые проблемы. Данная задача решена системой и способом, которые обеспечивают возможность вращательного движения в транспортном средстве или в передвижной рабочей машине, и обладают отличительными признаками, изложенными в формуле изобретения.
В частности, указанные проблемы могут быть решены путем сочетания отличительных признаков, которые изложены в отличительных частях п. 1 и п. 19 формулы изобретения.
Предпочтительные варианты осуществления изобретения представлены, как предмет зависимых пунктов формулы изобретения.
При обеспечении возможности вращательного движения рамной секции такой, как кабина или грузовое пространство, или иной полезной нагрузки, предусматриваемой в транспортном средстве или рабочей машине выше ходовых элементов относительно по меньшей мере нижней рамной секции, а предпочтительно относительно основной рамы, связанной с ходовыми элементами, предпочтительно, чтобы ось вращения такой секции располагалась максимально близко к поверхности, на которой работает транспортное средство или рабочая машина (рабочей поверхности), например, к земле. Тем самым, может быть также уменьшена интенсивность поперечных колебаний, которые иначе возникают в транспортном средстве или рабочей машине. Другими словами, оказывается возможным гасить, или даже совершенно исключать вращение или колебания верхней рамной секции, даже если у массы, которую необходимо демпфировать или стабилизировать, центр тяжести расположен высоко относительно рабочей поверхности.
Поскольку изобретение позволяет минимизировать поперечные колебания, касающиеся кабины или грузового пространства или иной полезной нагрузки, то могут быть в существенной мере уменьшены и нагрузки, которые прикладываются к конструкции рамы или грузового пространства или к несущим элементам другой полезной нагрузки транспортного средства или рабочей машины. В то же время можно уменьшить основные нагрузки, которые иначе возникают, в частности, в результате стабилизации грузового пространства.
Данная задача решена в настоящем изобретении, благодаря тому, что в транспортном средстве или рабочей машине предусмотрена возможность движения верхней секции относительно нижней секции по существу по криволинейной траектории, и также относительно основной рамы, связанной с ходовыми элементами. Нижняя секция содержит по меньшей мере ходовые элементы для обеспечения возможности движения транспортного средства или рабочей машины. Криволинейная траектория по меньшей мере на части своей длины имеет форму дуги окружности, при этом предпочтительно, чтобы криволинейная траектория имела форму дуги окружности на всем своем протяжении. С другой стороны, криволинейная траектория может быть разной в отношении своей кривизны, а также в отношении направленности своей кривизны. В предпочтительном случае данная криволинейная траектория изгибается вокруг продольного направления транспортного средства. Когда данное техническое решение применяется к транспортному средству с рамным управлением поворотом или с колесным управлением поворотом или к рабочей машине, то шкворень поворотного кулака транспортного средства с рамным управлением поворотом, а также тележки или оси гусеничной платформы, жестко смонтированный на основной раме, или двухколесной оси, дополнительно соединен посредством основной рамы известным способом. Поэтому, напряжения передаются от шкворня поворотного кулака к жесткому болтовому креплению тележки или оси гусеничной платформы или двухколесной оси таким же образом, что и прежде. Таким образом, нет необходимости в промежуточном силовом несущем узле такого типа, какой иначе бы потребовался, особенно для тележки маятникового типа или оси гусеничной платформы или двухколесной оси.
Согласно настоящему изобретению, нет необходимости в отдельном шарнирном соединении подвески типа rocker-bogie с рамой транспортного средства или рабочей машины, которая несет нагрузки от рельефа и силовой трансмиссии. Подвеска типа rocker-bogie также не нужна для устранения сил, возникающих при поворотах рабочей машины или преодолении препятствий рельефа. Соответственно, благодаря техническому решению, предложенному в настоящем изобретении, оказалось возможным по большей части избежать увеличения собственного веса транспортного средства или рабочей машины по причине применения подвески типа rocker-bogie или ей подобной. В то же самое время оказалось возможным сохранить механику шарнирных соединений максимально простой, а также гидравлику и управление не сделать существенно более сложными, чем прежде.
Простая механика, присущая настоящему техническому решению, также позволяет транспортное средство или рабочую машину сконструировать по модульному принципу. Благодаря изобретению, транспортное средство может быть построено на основе традиционных конструкций известных в уровне техники. Однако, если требуется, то между верхней секцией и нижней секцией могут быть просто добавлены соответствующие изобретению элементы, обеспечивающие возможность движения, при этом боковые колебания верхней секции и функцию стабилизации в транспортном средстве или рабочей машине можно будет легче контролировать, чем прежде.
Благодаря возможности использования тележечной структуры как на передней, так на задней рамах транспортного средства или рабочей машины, давление шин на рабочую поверхность будет распределяться более равномерно, чем прежде. Таким образом, повреждение грунта и корневой системы, которое в ином случае вызывается лесозаготовительной машиной будет уменьшено, при этом передвижение по мягкой поверхности облегчается. Соответственно можно уменьшить пиковую нагрузку, которая прикладывается к индивидуальной половине тележки или оси гусеничной платформы, или двухколесной оси (к комплекту колес на одной и той же стороне машины, который установлен на тележке или на оси гусеничной платформы или на традиционной оси), поскольку нагрузка распределяется более равномерно на все колеса машины.
Когда данное техническое решение применяется к лесозаготовительной машине, то можно, например, на участке вырубки леса высоко загружать грузовое пространство, и вести машину даже по узкой дороге, не повреждая деревьев вдоль дороги. Это возможно, поскольку раму транспортного средства, или раму, находящуюся выше ходовых элементов, другими словами, верхнюю секцию можно поддерживать по существу в вертикальном положении, т.е. горизонтально выравнивать ее легче, чем прежде. В результате можно избегать повреждений, которые в ином случае вызываются боковыми колебаниями - повреждений, как окружающего леса, рельефа, так и лесной почвы, и соответственно повреждений самого транспортного средства или рабочей машины.
Несмотря на то, что настоящее изобретение главным образом нацелено на поддержание верхней секции транспортного средства или рабочей машины по существу в вертикальном положении, соответствующий изобретению элемент, задающий траекторию, также допускает ручное управление. Таким образом, верхнюю секцию можно, например, поворачивать и фиксировать, как это необходимо, в определенном положении относительно нижней секции. Такие ситуации могут возникать, например, при работе на склоне, или когда стрела, выдвинутая на большую длину, используется для подъема большого груза, и тем самым в целях стабилизации рабочая машина может быть поставлена с наклоном в противоположном направлении. С другой стороны, грузовое пространство форвардера может быть наклонено к рабочей стороне, чтобы, например, опорные брусья рабочей стороны грузового пространства лесозаготовительной машины, т.е. бортов грузового пространства были повернуты в более низкое положение.
Следовательно, могут быть ослаблены требования к подъему груза, предъявляемые к головке стрелы погрузчика лесозаготовительной машины. Кроме того, могут быть уменьшены напряжения в раме транспортного средства и осях, что потребует меньшего объема технического обслуживания и ремонта.
Прочие преимущества настоящего изобретения будут рассмотрены в дальнейшем при более точном описании конкретных вариантов его осуществления.
Краткое описание чертежей
Ниже будут более подробно описаны несколько предпочтительных вариантов осуществления изобретения со ссылками на прилагаемые чертежи, среди которых:
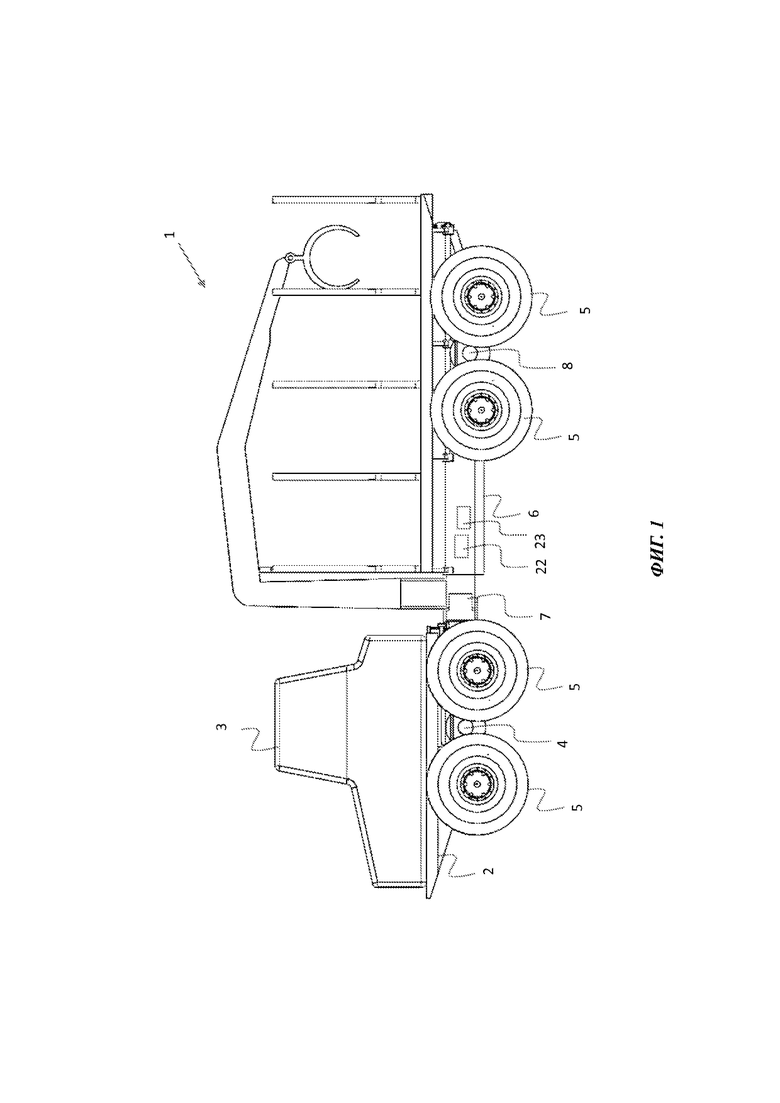
фиг. 1 изображает схематический вид в аксонометрии лесозаготовительной машины, оснащенной рамной конструкцией, соответствующей настоящему изобретению,
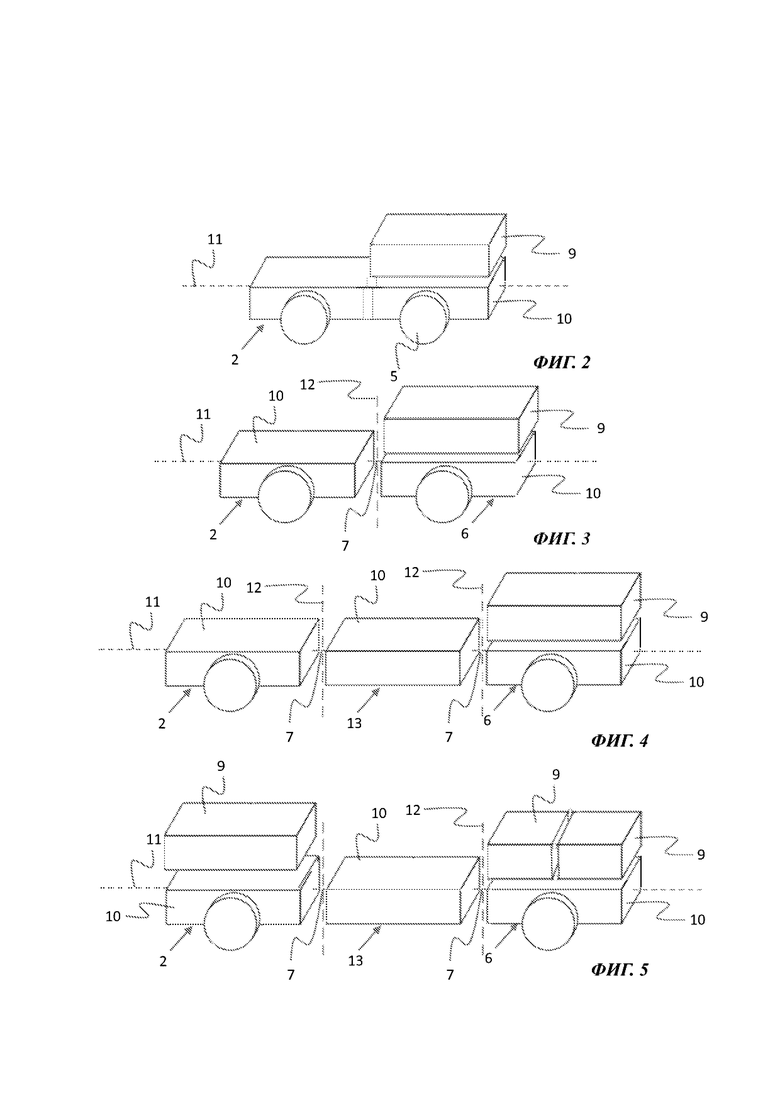
фиг. 2 изображает схематический вид рабочей машины с соединенными друг с другом нижней секцией и верхней секцией,
фиг. 3 изображает схематический вид рабочей машины с соединенными друг с другом двумя нижними секциями, с рамным шарниром и одной верхней секцией,
фиг. 4 изображает схематический вид рабочей машины с соединенными друг с другом тремя нижними секциями, с рамными шарнирами и одной верхней секцией,
фиг. 5 изображает схематический вид рабочей машины с соединенными друг с другом тремя нижними секциями, с рамными шарнирами и тремя верхними секциями,
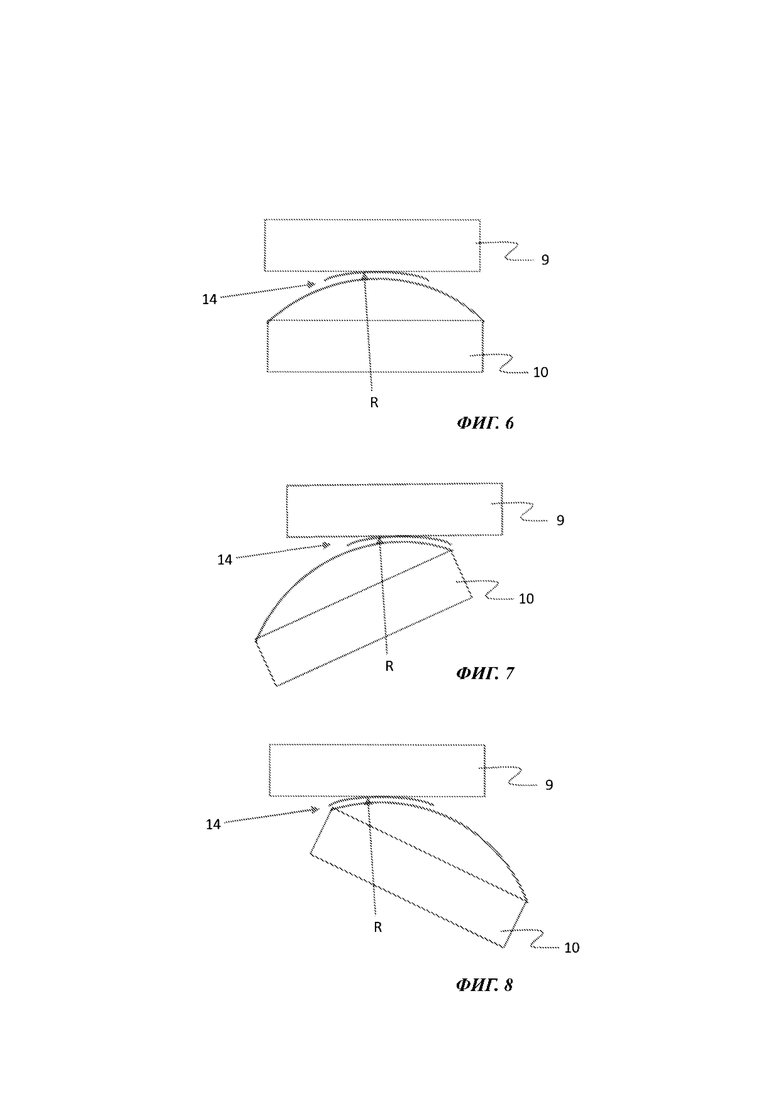
фиг. 6-8 схематически изображают движение по криволинейной траектории, которое обеспечивает устройство, задающее траекторию перемещения, для нижней и верхней секций относительно друг друга,
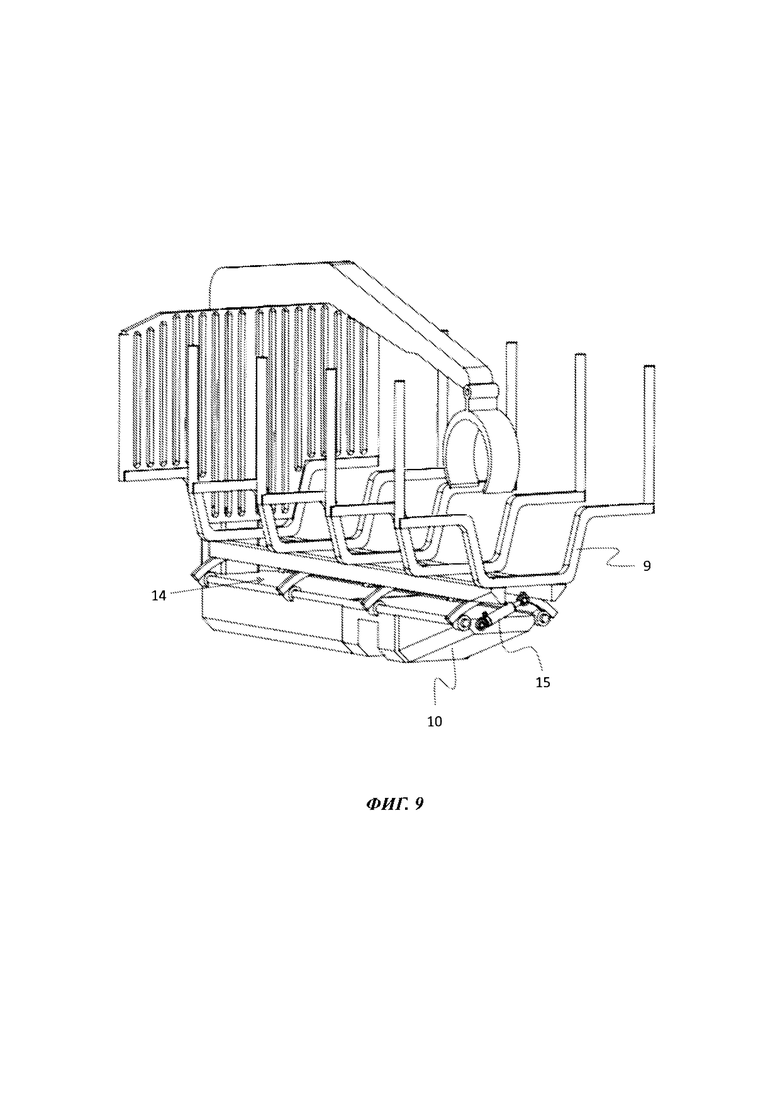
фиг. 9 изображает первый вариант осуществления изобретения для верхней и нижней секций, соединенных друг с другом посредством устройства, задающего траекторию перемещения, на виде в аксонометрии сзади и сбоку,
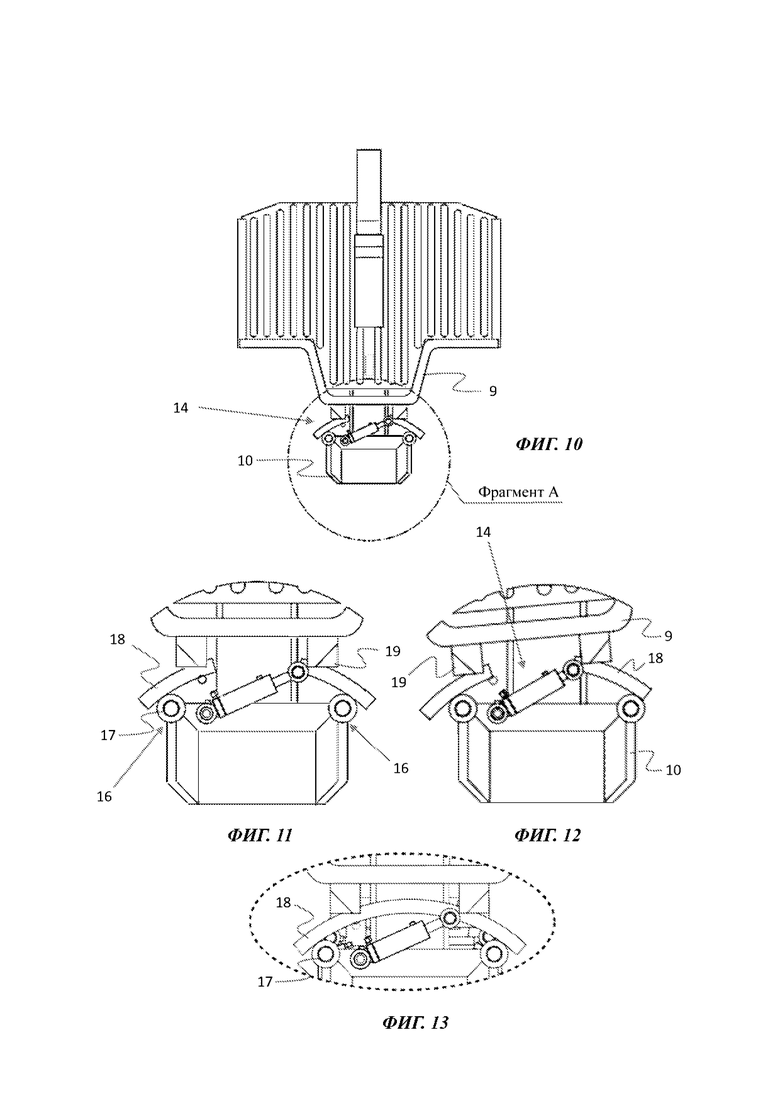
фиг. 10 изображает вариант осуществления фиг. 9 на виде сзади,
фиг. 11 изображает фрагмент А с фиг. 10 первого варианта осуществления устройства, задающего траекторию перемещения; верхняя секция совокупно повернута над нижней секцией в вертикальное положение,
фиг. 12 изображает фрагмент А с фиг. 10; верхняя секция в процессе поворота против часовой стрелки относительно нижней секции,
фиг. 13 изображает фрагмент второго варианта осуществления устройства, задающего траекторию перемещения; верхняя секция совокупно повернута над нижней секцией в вертикальное положение,
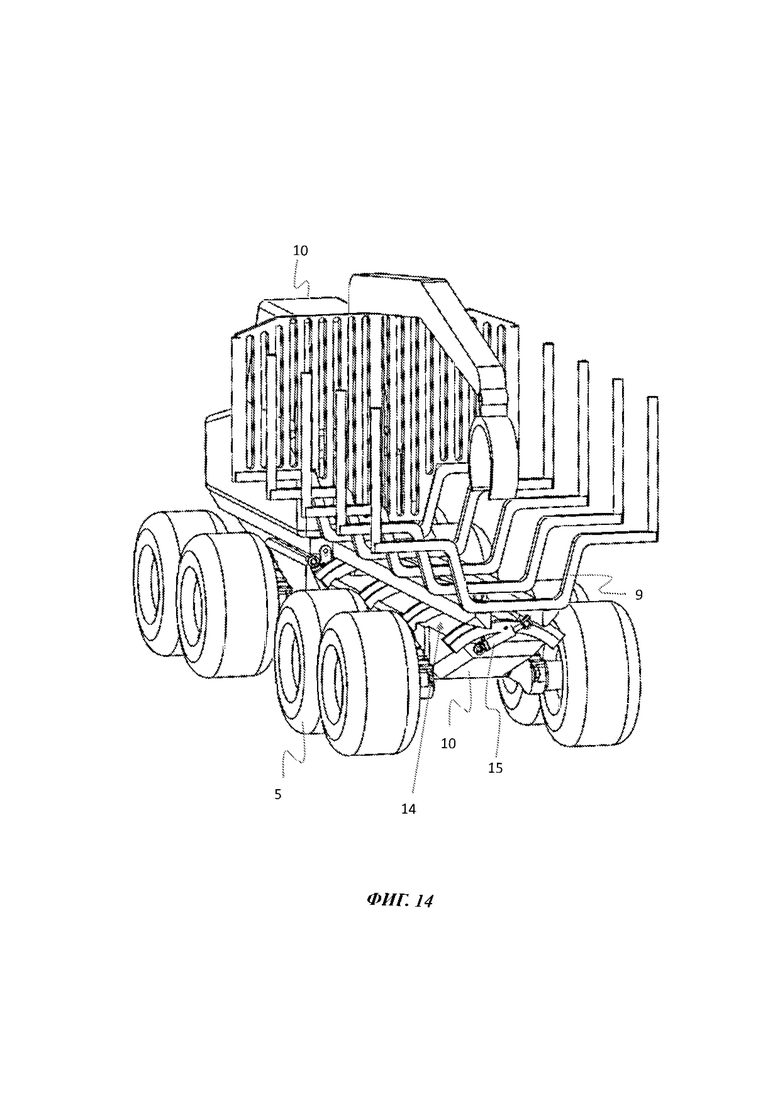
фиг. 14 изображает второй вариант осуществления изобретения для верхней и нижней секций, соединенных друг с другом посредством устройства, задающего траекторию перемещения, на виде в аксонометрии сзади и сбоку,
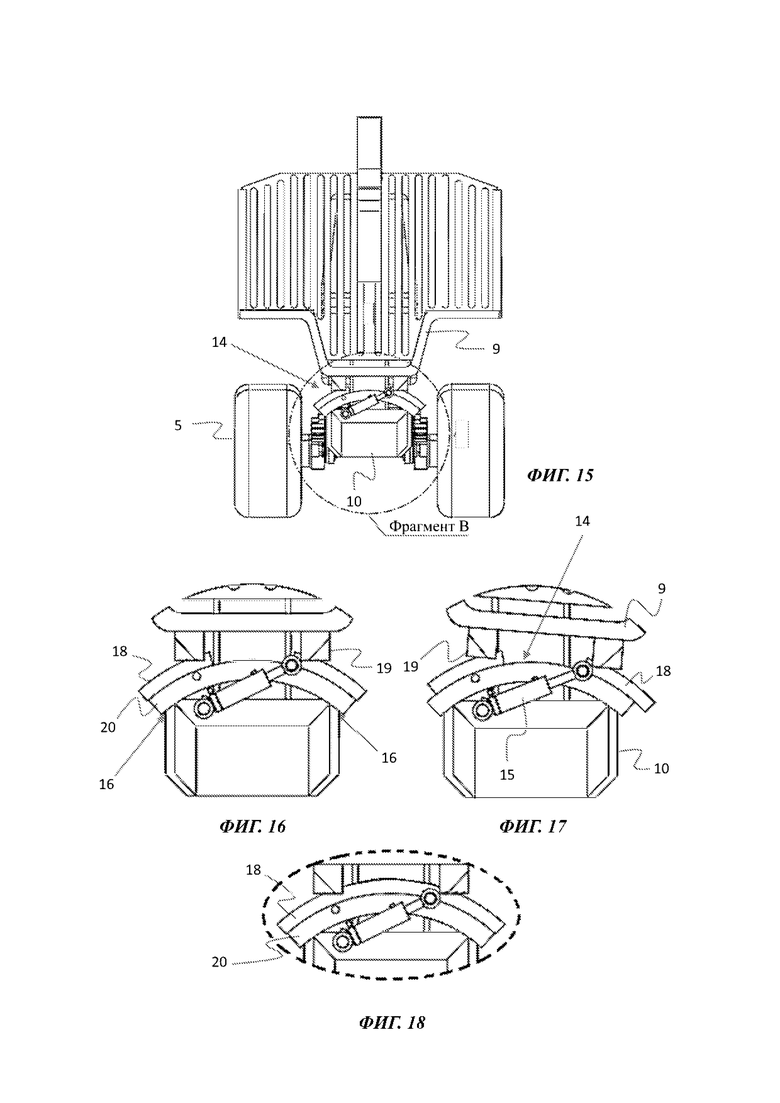
фиг. 15 изображает вариант осуществления фиг. 14 на виде сзади,
фиг. 16 изображает фрагмент В с фиг. 15 третьего варианта осуществления устройства, задающего траекторию перемещения; верхняя секция совокупно повернута над нижней секцией в вертикальное положение,
фиг. 17 изображает фрагмент В с фиг. 15 третьего варианта осуществления устройства, задающего траекторию перемещения; верхняя секция в процессе поворота по часовой стрелке относительно нижней секции,
фиг. 18 изображает фрагмент четвертого варианта осуществления устройства, задающего траекторию перемещения; верхняя секция совокупно повернута над нижней секцией в вертикальное положение,
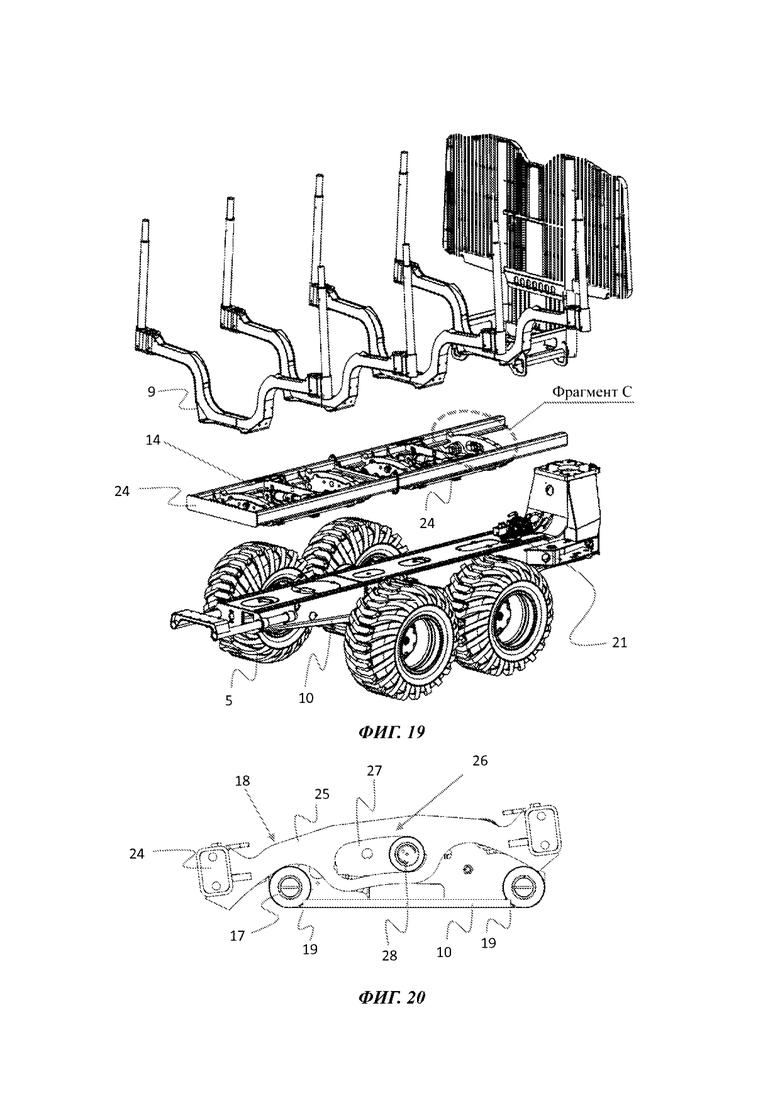
фиг. 19 изображает один вариант осуществления задней секции рабочей машины, в котором модульное построение задней секции изображено на виде с пространственным разнесением деталей, и
фиг. 20 изображает фрагмент С с фиг. 19, иллюстрирующий один предпочтительный вариант устройства переноса.
Осуществление изобретения
В представленных чертежах система или способ для обеспечения возможности вращательного движения в транспортном средстве или передвижной рабочей машине изображены не в масштабе; напротив, фигуры носят схематический характер, подчеркивая конкретную конструкцию и работу предпочтительных вариантов осуществления в принципе. Таким образом, элементы конструкций, обозначенные на прилагаемых чертежах позиционными номерами, соответствуют элементам конструкций, обозначенных позиционными номерами в настоящем описании.
Что касается конструкции и работы, то система, соответствующая настоящему изобретению, в дальнейшем будет рассматриваться главным образом в отношении лесозаготовительных машин. Несмотря на то, что по этой причине рассматриваемый вариант осуществления содержит лесозаготовительную машину 1 с шарнирно-сочлененной рамой, представляемая система не ограничивается только такими условиями эксплуатации, но она может быть использована и в других транспортных средствах или передвижных установках, как с одной, так и с несколькими рамами, в случаях, когда рамное управление поворотом предусмотрено или не предусмотрено. Фактически, несколько других вариантов технического решения представлены на прилагаемых фигурах 2, 3, 4 и 5.
Согласно фиг. 1, один вариант осуществления системы, соответствующей настоящему изобретению, содержит лесозаготовительную машину 1, у которой можно выделить переднюю секцию 2 и предусмотренную на ней кабину 3. Передняя секция оснащена осью 4 тележки, которая выступает на обе стороны секции, и также в изображенном варианте оснащена колесами, которые образуют ходовые элементы 5 машины. Таким образом, указанные ходовые элементы могут состоять из оси с принадлежащими ей колесами, качающейся оси с принадлежащими ей колесами, оси тележки с принадлежащими ей колесами, оси гусеничной платформы, или иных элементов, которые известны как таковые, и при помощи которых транспортное средство или рабочая машина приводится в движение относительно поверхности, на которой она работает. Передняя секция соединена с задней секцией 6 предпочтительно посредством рамного шарнира 7, который имеет две степени свободы. Задняя секция аналогичным образом оснащена осью 8 тележки, которая выступает на обе стороны секции, и также оснащена колесами, которые образуют вторую группу ходовых элементов 5. Рамный шарнир 7, соединяющий между собой переднюю и заднюю секции, позволяет известным образом, осуществлять как поворот передней и задней секций относительно оси вращения - по существу продольной оси транспортного средства (поворотный шарнир, обеспечивающий адаптацию к особенностям рельефа), так и поворот передней и задней секций относительно друг друга вокруг вертикальной оси, проходящей через шарнир (шарнир, обеспечивающий возможность поворота рамы).
Хотя данное техническое решение будет далее рассматриваться в отношении конкретно оси колесной тележки, равным образом систему, соответствующую настоящему изобретению, можно осуществить с осью, которая оснащена не колесами тележки, а, например, гусеничными лентами на противоположных сторонах рамы. Такая ось тележки или гусеничной платформы или двухколесная ось в предпочтительном варианте относятся к качающемуся типу, но функциональная идея, рассматриваемая в настоящем изобретении, может быть равным образом осуществлена также и в тележке некачающегося типа или в оси гусеничной платформы или в двухколесной оси.
С другой стороны, как показано на фиг. 2, устройство, соответствующее настоящему изобретению, может содержать всего лишь две секции, которые по меньшей мере частично находятся в положении перекрытия относительно поверхности, на которой работает транспортное средство или рабочая машина, и которые образуют сборную конструкцию со структурами, которые в дальнейшем можно называть верхней секцией 9 и нижней секцией 10.
В варианте осуществления фиг. 2 нижняя секция содержит по меньшей мере ходовые элементы 5, которые могут включать в себя по меньшей мере следующие компоненты: ось с набором колес, ось тележки с шинами или ось гусеничной платформы с гусеничными лентами или цепями.
Вариант осуществления с фиг. 3 в качестве примера схематически представляет рабочую машину, изображенную на фиг. 1. На фигуре можно выделить соединенные между собой переднюю секцию 2 и заднюю секцию 6. Секции соединены между собой посредством рамного шарнира 7, который имеет по меньшей мере две степени свободы. Данный рамный шарнир дает возможность взаимосвязанным передней и задней секциям совершать поворот вокруг оси 11 вращения, которая является по существу продольной осью транспортного средства или рабочей машины, а также вокруг вертикальной оси 12, проходящей через рамный шарнир. Указанные секции одновременно образуют две нижние секции 10 системы. Сверху одной нижней секции находится верхняя секция 9, которая в варианте осуществления рабочей машины может представлять собой упомянутую выше кабину 3, погрузчик, приводимый в действие рабочей машиной или грузовое пространство для перевозки груза.
На фиг. 4, в свою очередь, изображен вариант осуществления, который включает в себя переднюю секцию 2 и заднюю секцию 6. Между указанными секциями помещена одна средняя секция 13, но можно предположить, что имеются несколько таких средних секций. Вышеуказанные секции образуют три нижние секции 10 системы. Секции соединены между собой посредством рамных шарниров 7, так что по меньшей мере один из указанных рамных шарниров представляет собой шарнир по меньшей мере с двумя степенями свободы, который позволяет совершать поворот шарнирно-сочлененной передней секции 2 относительно средней секции 13, средней секции 13 относительно задней секции 6, или двух соседних средних секций вокруг оси 11 вращения, которая по существу представляет собой продольную ось транспортного средства или рабочей машины, а также вокруг вертикальной оси 12, проходящей через рамный шарнир. Сверху нижней секции 6 (самой правой на фигуре) предусмотрена верхняя секция 9, которая в варианте рабочей машины может представлять собой упомянутую выше кабину, или грузовое пространство или иную эквивалентную полезную нагрузку.
На фиг. 5 изображен вариант осуществления, предназначенный для демонстрации множества возможных вариантов сочетания верхних секций 9 и нижних секций 10. Таким образом, транспортное средство или рабочая машина может содержать переднюю секцию 2 и заднюю секцию 6, между которыми может быть размещена средняя секция 13. Вышеупомянутые секции образуют три нижние секции системы. Поскольку число указанных секций равно трем, эти секции соединены друг с другом посредством рамных шарниров 7 таким образом, что по меньшей мере один из рамных шарниров является шарниром по меньшей мере с двумя степенями свободы, который позволяет совершать поворот шарнирно-сочлененной передней секции 2 относительно средней секции 13, или средней секции 13 относительно задней секции 6 вокруг оси 11 вращения, которая по существу является продольной осью транспортного средства или рабочей машины, а также вокруг вертикальной оси 12, проходящей через рамный шарнир. Две нижние секции 6 оснащены: одна - одной верхней секцией 9, а другая (крайняя справа) двумя верхними секциями 9, которые в варианте рабочей машины могут представлять собой, например, кабину, погрузчик или, как говорилось ранее, грузовое пространство, аналогичную эквивалентную нагрузку.
В системе, соответствующей настоящему изобретению, верхние секции 9, которые по меньшей мере частично находятся в положении перекрытия относительно поверхности, на которой работает транспортное средство или рабочая машина, могут быть приведены во вращательное движение относительно нижней секции 10, и вокруг оси 11 вращения, которая по существу является продольной осью транспортного средства или рабочей машины. С этой целью верхняя секция и нижняя секция выполнены с возможностью движения относительно друг друга посредством по меньшей мере одного элемента 14, задающего траекторию, который формирует криволинейную траекторию. Такой элемент, задающий траекторию, выполнен с возможностью обеспечения возможности движения верхней секции 9 относительно нижней секции 10, так что указанное движение происходит по криволинейной траектории, причем указанная криволинейная траектория по меньшей мере на части своей длины имеет форму дуги окружности. Данная траектория лежит в плоскости сечения, которая, по существу, перпендикулярна продольной оси вращения транспортного средства или рабочей машины. Размер секций в принципе определяет число элементов, задающих траекторию, которое необходимо предусмотреть в системе - один или более. Движение секций относительно друг друга схематически показано на фиг. 6-8, при этом траектория элемента, задающего траекторию, лежит в плоскости чертежа. Поэтому состояние, изображенное на фиг. 6, соответствует ситуации, когда лесозаготовительная машина движется по ровному рельефу, т.е. по плоской рабочей поверхности, или стоит неподвижно на плоской рабочей поверхности. В случае состояния, изображенного на фиг. 7, ходовые элементы 5 правой стороны рабочей машины находятся в процессе перехода через препятствие на рабочей поверхности (или ходовые элементы левой стороны машины заехали во впадину на рабочей поверхности). Соответственно, в случае состояния, изображенного на фиг. 8, ходовые элементы левой стороны рабочей машины находятся в процессе перехода через препятствие на рабочей поверхности или шины противоположной стороны машины (правой стороны) заехали во впадину. Следовательно, ходовые элементы обеспечивают возможность движения верхней секции 9 по криволинейной траектории, желательно по дуге окружности, в перпендикулярном направлении относительно продольной оси вращения транспортного средства.
Фиг. 9-18 иллюстрируют два различных варианта осуществления изобретения для системы в отношении лесозаготовительной машины 1 - форвардера. На данных фигурах можно видеть по меньшей мере один исполнительный элемент 15, который обеспечивает относительное перемещение верхней и нижней секций 9 и 10, предусмотренных в транспортном средстве или рабочей машине, и который воздействует на верхнюю секцию и/или на нижнюю секцию. При таком варианте осуществления исполнительный элемент может в целях обеспечения движения совершать толкающее или тянущее движение. С другой стороны, исполнительный элемент может состоять из ведущей шестерни, которая путем своего вращения управляет зубчатой рейкой, которая предусмотрена на элементе, задающем траекторию. Конструкция и работа исполнительного элемента, как таковые не являются существенными для системы, соответствующей настоящему изобретению. Усилие, которое требуется от исполнительного элемента, может быть получено путем использования среды, находящейся под давлением, т.е. гидравлически или пневматически. Исполнительным элементом, который работает на давлении рабочей среды, является, например, гидравлический цилиндр. Усилие, которое требуется от исполнительного элемента, может быть получено электрически путем использования, например, электрического двигателя, такого как линейный двигатель.
Фиг. 9-13 изображают более конкретно первый предпочтительный вариант осуществления элементов 14, задающих траекторию. Так, элементы, задающие траекторию, могут содержать направляющие ролики 17, установленные на противоположных наружных краях 16 нижней секции 10, причем указанные края по направлению совпадают с направлением продольной оси 11 вращения транспортного средства, и предусмотрены на обеих сторонах транспортного средства. Направляющие ролики, находящиеся на одном и том же наружном крае, могут иметь общую ось вращения или отдельные оси вращения, которые по существу параллельны оси 11 вращения. Чтобы получить вращение верхней и нижней секций 9,10 относительно друг друга, направляющие ролики работают, взаимодействуя с криволинейным направляющим рельсом 18, установленным на верхней секции. Данный направляющий рельс в свою очередь расположен по существу перпендикулярно продольной оси транспортного средства, т.е. оси 11 вращения. Данный криволинейный направляющий рельс может, как показано на фиг. 13, состоять из непрерывного дугового сегмента, или, как показано на фиг. 11 и 12, может состоять из двух дуговых сегментов, которые установлены на противоположных наружных углах 19 верхней секции 9, и ось которых по направлению совпадает с осью 11 вращения.
С другой стороны, фиг. 14-18 изображают более конкретно второй предпочтительный вариант осуществления элементов 14, задающих траекторию. В данном случае, элементы, задающие траекторию, содержат направляющий рельс 20 скольжения, проходящий до противоположных наружных краев 16 нижней секции 10, которые по направлению совпадают с продольной осью 11 вращения транспортного средства и предусмотрены с обеих сторон. Данный направляющий рельс скольжения в свою очередь установлен по существу перпендикулярно оси 11 вращения, и взаимодействует с криволинейным направляющим рельсом 18, установленным на верхней секции 9. Данный криволинейный направляющий рельс также ориентирован по существу перпендикулярно продольной оси вращения транспортного средства. Также, как и в предшествующем первом варианте осуществления изобретения, данный криволинейный направляющий рельс может, как показано на фиг. 18, состоять из непрерывного дугового сегмента, который выполнен из единого куска материала, и является более простым и экономичным в изготовлении. Как показано на фиг. 16 и 17, данный дуговой сегмент может быть составлен из двух дуговых сегментов, которые установлены на противоположных наружных углах 19 верхней секции, и ось которых по направлению совпадает с осью 11 вращения. Такое устройство конструктивно является более легким, и при этом экономится пространство для других компонентов.
Систему, соответствующую настоящему изобретению, также можно использовать таким образом, при котором поддерживающий момент необходимый для стабилизации нижней секции 10 транспортного средства или рабочей машины определяют путем определения момента, приложенного верхней секцией к нижней секции. Такая процедура дает преимущество, заключающееся в обеспечении регулирования для активной стабилизации в соответствии с рабочим состоянием и преобладающими условиями. Дополнительно, такое решение делает возможным то, что инструменты управления, используемые для управления вращением различных секций транспортного средства или рабочей машины, могут быть применены для стабилизации транспортного средства или рабочей машины, как во время вождения, так и в неподвижном состоянии.
С этой целью система может содержать измерительные инструменты 21 для определения составляющей момента, приложенного верхней секцией к нижней секции, причем указанная составляющая действует вокруг по существу продольной оси вращения транспортного средства или рабочей машины. Система дополнительно содержит инструменты 22 определения для определения на основе момента, приложенного верхней секцией к нижней секции, величины и направления по меньшей мере одного поддерживающего момента необходимого для стабилизации по меньшей мере нижней секции. На основе информации, полученной от измерительных инструментов и инструментов определения, можно использовать управляющие элементы 23 для приведения в действие по меньшей мере одного исполнительного элемента для создания расчетного поддерживающего момента.
Устойчивость транспортного средства или рабочей машины может быть дополнительно увеличена, если повлиять на расчетный центр тяжести при движении секций относительно друг друга. За счет изменения радиуса R кривизны криволинейной траектории, формируемой элементами, задающими траекторию, действительно есть возможность смещать положение оси вращения, которую определяют элементы, задающие траекторию. Таким образом, радиус кривизны можно выбрать так, чтобы ось вращения, определяемая элементами, задающими траекторию, располагалась ниже верхней поверхности системы подвески ходовых элементов, которые расположены в нижней секции. Радиус кривизны траектории можно выбрать даже так, чтобы ось вращения, определяемая элементами, задающими траекторию, располагалась ниже системы подвески ходовых элементов, расположенных в нижней секции.
Соответствующая настоящему изобретению система для обеспечения возможности вращательного движения в транспортном средстве или передвижной рабочей машине действует следующим образом.
По меньшей мере две секции, предусмотренные в транспортном средстве или рабочей машине, расположены так, что по существу наложены друг на друга по отношению к поверхности, на которой работает транспортное средство или рабочая машина, образуя в транспортном средстве или рабочей машине верхнюю секцию 9 и нижнюю секцию 10.
Указанные верхнюю секцию 9 и нижнюю секцию 10 в таком наложенном состоянии приводят во вращательное движение друг относительно друга, и вокруг оси 11 вращения - продольной оси транспортного средства или рабочей машины, при этом для осуществления такого движения верхняя секция и нижняя секция устроены так, что обладают способностью движения друг относительно друга посредством по меньшей мере одного элемента 14, задающего траекторию, который формирует криволинейную траекторию.
Указанный элемент 14, задающий траекторию, обеспечивает возможность движения верхней секции 9 относительно нижней секции 10 таким образом, что указанное движение происходит по криволинейной траектории в одной или более плоскостях сечения, которые перпендикулярны оси вращения. В самом деле, данное движение осуществляется посредством по меньшей мере одного исполнительного элемента 15, который должен быть установлен на транспортном средстве или рабочей машине, и должен держаться на верхней секции и/или на нижней секции. Вышеупомянутая криволинейная траектория проходит вокруг продольной оси вращения транспортного средства или рабочей машины, и своей выпуклостью обращена к верхней секции 9.
В рассматриваемой процедуре важным является то, что верхняя секция 9, например, грузовое пространство рабочей машины, находится выше нижней секции 10, и движется в поперечном направлении по криволинейной траектории, предпочтительно, по существу по дуге окружности. Указанная траектория определяется осью 11 вращения, которая по направлению совпадает с продольной осью транспортного средства или рабочей машины, и вокруг которой совершается движение. Данную ось вращения, вокруг которой совершает движение верхняя секция, т.е. верхняя конструкция или полезная нагрузка транспортного средства или рабочей машины, располагают максимально низко. Можно считать, что задача состоит в том, чтобы ось вращения располагалась ниже системы подвески ходовых элементов 5, например, колесной тележки, близко к земле (поверхности, на которой работает транспортное средство).
Данная задача решена за счет того, что элементы 14, задающие траекторию, построены путем установки направляющих роликов 17 на противоположных наружных краях 16 нижней секции 10, причем указанные края совпадают по направлению с осью 11 вращения, и предусмотрены на обеих сторонах секции. Оси вращения указанных направляющих роликов выбраны так, что они по существу параллельны оси вращения. Кроме того, верхняя секция 9 оснащена криволинейным (предпочтительно в форме дуги окружности) направляющим рельсом 18, в предпочтительном варианте расположенным перпендикулярно оси вращения, причем указанный криволинейный направляющий рельс взаимодействует с указанными направляющими роликами. Таким образом, предусмотренный в системе исполнительный элемент 15 может быть использован для приведения верхней секции в контролируемое вращательное движение, при этом направляющий рельс 18 поворачивается вокруг оси 11 вращения под управлением направляющих роликов.
Соответствующее настоящему изобретению техническое решение естественно может также быть реализовано способом, совместимым с рассмотренными выше отличительными признаками и конструкциями, если направляющие ролики 17 и криволинейные направляющие рельсы 18 установить так, чтобы ролики располагались на верхней секции 9, а криволинейные направляющие рельсы на нижней секции 10.
Также можно выполнить элементы 14, задающие траекторию, в виде направляющего рельса 20 скольжения, проходящего к противоположным наружным краям 16 нижней секции 10, направление которых совпадает с направлением оси 11 вращения, и которые предусмотрены на обеих сторонах нижней секции, причем указанный направляющий рельс скольжения ориентирован по существу перпендикулярно оси вращения. Верхняя секция 9 в свою очередь оснащена криволинейным (предпочтительно в форме дуги окружности) направляющим рельсом 18, который ориентирован по существу перпендикулярно оси вращения, и работает совместно с направляющим рельсом скольжения. С другой стороны, криволинейный направляющий рельс по меньшей мере на части своей длины имеет форму дуги окружности. Кроме того, данный направляющий рельс может быть различным в отношении своей кривизны и ориентации. В предпочтительном варианте данная криволинейная траектория закругляется вокруг продольного направления транспортного средства. Тогда за счет исполнительного элемента, который предусмотрен в системе, верхняя секция может быть приведена в движение, что вызывает поворотное движение верхней секции, при этом направляющий рельс поворачивается вокруг оси вращения, а его движение управляется направляющими рельсами скольжения.
Фиг. 19 демонстрирует особое преимущество, которое может быть достигнуто за счет рассмотренного варианта осуществления изобретения, т.е. возможность построения транспортного средства или рабочей машины по модульному принципу. Как можно видеть из фиг. 19, в транспортном средстве или рабочей машине между ее нижней секцией 10 и верхней секцией 9 могут быть легко установлены элементы 14, задающие траекторию. Таким образом, например, рабочую машину со стабилизированным грузовым пространством и традиционную рабочую машину с задней рамой и неподвижным грузовым пространством можно изготовить, используя одинаковые основные конструктивные элементы. Стабилизацию полезной нагрузки рабочей машины, т.е. горизонтальное выравнивание, можно осуществить, если между нижней секцией рабочей машины и верхней секцией (грузовым пространством) установить стабилизирующий модуль 24 особой конструкции, который содержит элементы, задающие траекторию. Такие стабилизирующие модули можно устанавливать в транспортное средство или рабочую машину в достаточном количестве в зависимости от полезной нагрузки, которую требуется перевозить, возникающих сил инерции или, например, от длины грузового пространства форвардера. Число стабилизирующих модулей, устанавливаемых на коротком грузовом пространстве, может равняться одному или двум, как на фиг. 19, где установлены два стабилизирующих модуля. Число стабилизирующих модулей, устанавливаемых на длинном грузовом пространстве, может равняться, например, от двух до трех. Как показано на фиг. 19, стабилизирующие модули могут иметь, по существу, жесткое соединение друг с другом. В то же самое время это помогает обеспечить взаимную синхронизацию цепочки стабилизирующих модулей.
Стабилизирующие модули 24 могут быть приспособлены для независимой работы, при этом каждый модуль включает в себя необходимые измерительные инструменты 21, инструменты 22 определения, инструменты 23 определения и исполнительные элементы 15. В ином варианте, стабилизирующие модули могут использовать одно или более указанных инструментов в виде группы, в которой указанные инструменты совместно используются определенными стабилизирующими модулями. Данное техническое решение обеспечивает основное преимущество с точки зрения промышленного изготовления, поскольку позволяет использовать единую конструкцию нижней секции рабочей машины.
Данное техническое решение можно использовать независимо от того, в чем заключается задача: в стабилизации верхней секции 9, которая должна быть установлена на передней секции 2, на средней секции 13 или на задней секции 6.
На фиг. 20 изображен один предпочтительный вариант осуществления элемента 14, задающего траекторию. Такой элемент, задающий траекторию, содержит направляющие ролики 17, установленные на противоположных наружных краях 16 нижней секции 10. Чтобы осуществить относительное вращение верхней и нижней секций 9 и 10, направляющие ролики работают совместно с управляющим элементом 25, который установлен на верхней секции, и на котором предусмотрены криволинейные направляющие рельсы 18. Данные направляющие рельсы выполнены на противоположных концах продолговатого управляющего элемента, и ориентированы по существу перпендикулярно продольной оси транспортного средства (оси 11 вращения). Управляющий элемент также оснащен особым удерживающим механизмом 26, в котором средний ролик 28, который входит в направляющий паз 27, имеющийся в управляющем элементе, и который выступает в этот паз от нижней секции, ограничивает поперечное перемещение управляющего элемента и воспринимает, предпочтительно вместе с направляющими роликами, некоторую часть нагрузки во время вращательного движения. Средний ролик также вынуждает управляющий элемент 25 оставаться в неизменном положении, и препятствует отсоединению управляющего элемента и связанной с ним верхней секции 9 от нижней секции 10.
Что касается работы, то данное техническое решение в самом деле основано на попытке гасить колебания полезной нагрузки транспортного средства или рабочей машины в поперечном направлении относительно продольной оси транспортного средства или рабочей машины путем обеспечения движения полезной нагрузки по криволинейной траектории за счет элементов 14, задающих траекторию. Поэтому, осуществляется приведение верхней секции 9 или иной полезной нагрузки к так называемому нормальному положению, или другими словами к вертикальному положению относительно направления силы тяжести или вектора ускорения свободного падения. Задача исполнительного элемента в том, чтобы выводить верхнюю секцию и возможно установленный на ней груз из наклонного положения в так называемое горизонтально ровное положение. В этом положении вектор ускорения верхней секции и центра масс возможного груза будут иметь составляющую, которая в основном совпадает по направлению с направлением силы тяжести. Это позволяет противостоять боковым наклонам верхней секции и/или эффективно гасить такие наклоны.
Термин «полезная нагрузка» используется в данном контексте по отношению к физическому телу, которое вовлечено в работу транспортного средства или рабочей машины, или входит в состав или манипулируется верхней секцией 9 транспортного средства или рабочей машины. Полезная нагрузка может быть представлена стрелой погрузчика и/или грузом, или транспортным средством/рабочей машиной или их частью. Некоторая полезная нагрузка может состоять, например, из стрелы погрузчика, отклоненной от продольной оси транспортного средства или рабочей машины, и/или смонтированного на стреле инструмента, такого как харвестерная головка или грейфер. Это может быть также какая-то иная масса, находящаяся на стреле погрузчика, например, загружаемый ствол дерева. Полезная нагрузка может также быть образована двигателем и кабиной, установленными на верхней секции, или грузом форвардера или иной аналогичной нагрузкой или инерцией такой массы.
Так как исполнительный элемент 15 используется для препятствования или демпфирования боковой раскачки верхней секции, то техническим результатом является уменьшение напряжений на рамные конструкции транспортного средства или передвижной рабочей машины, повреждений грунта, вероятности опрокидывания грузового пространства в форвардерах или, соответственно, вероятности опрокидывания других транспортных средств или рабочих машин.
В вариантах осуществления настоящего изобретения, технический эффект, обеспечиваемый криволинейной траекторией, состоит в том, что у криволинейной траектории движения верхней секции или полезной нагрузки имеется центр, вокруг которого совершается по меньшей мере часть вращательного движения, и который расположен ниже верхней поверхности нижней секции, предпочтительно полностью ниже нижней секции, а более предпочтительно даже вровень с поверхностью или ниже поверхности, на которой работает транспортное средство.
Поскольку криволинейная траектория по меньшей мере на части своей длины по форме представляет собой дугу окружности, указанную траекторию или направляющий рельс, который задает траекторию, можно изменять в отношении кривизны. Таким образом, естественно, с изменением кривизны будет изменяться и радиус траектории, и одновременно положение его центра. Следовательно, изменяется кривизна траектории, формируемая элементом, задающим траекторию, и в то же время изменяется ее центр сообразно желаемой точке на траектории. Соответственно, можно задать, чтобы центр траектории располагался в определенной области, а не в единственной точке. Согласно одному предпочтительному случаю, траектория на протяжении всей своей длины имеет искривленность, соответствующую дуге окружности.
Специалистам в данной области должно быть очевидно, что с развитием технологии основную идею рассмотренного технического решения можно будет реализовать множеством способов. Поэтому техническое решение, соответствующее настоящему изобретению, и варианты его осуществления не должны ограничиваться приведенными примерами, а напротив они могут меняться в границах, которые устанавливает формула изобретения.
Изобретение относится к транспорту. Система для обеспечения возможности вращательного движения в транспортном средстве содержит по меньшей мере две секции – верхнюю и нижнюю – и переднюю и заднюю секции. Верхняя и нижняя секции частично перекрывают друг друга и связаны с возможностью перемещения друг относительно друга посредством элемента, задающего криволинейную траекторию. Нижняя секция содержит ходовые элементы для обеспечения движения верхней секции относительно нижней по криволинейной траектории и в плоскости, перпендикулярной продольной оси вращения транспортного средства. Траектория по меньшей мере на части своей длины имеет форму дуги окружности и проходит вокруг продольной оси вращения транспортного средства. Движение предусмотрено посредством исполнительного элемента, установленного на транспортном средстве и удерживаемого на верхней и/или нижней секции. Передняя и задняя секции расположены друг за другом в продольном направлении и соединены посредством рамного шарнира по меньшей мере с двумя степенями свободы. Шарнир обеспечивает возможность вращения секций относительно продольной оси транспортного средства и вертикальной оси, проходящей через шарнир. Достигается повышение устойчивости транспортного средства. 2 н. и 19 з.п. ф-лы, 20 ил.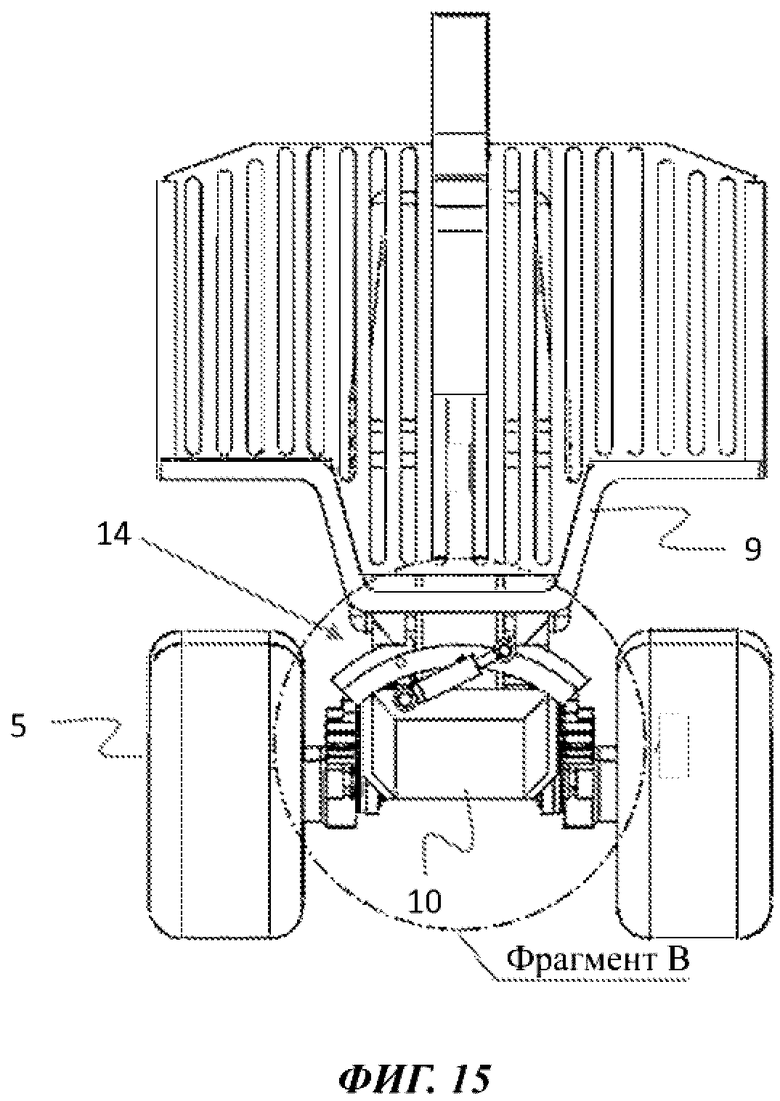
1. Система для обеспечения возможности вращательного движения в транспортном средстве или передвижной рабочей машине, причем указанное транспортное средство или рабочая машина содержит по меньшей мере две секции, при этом
по меньшей мере две из указанных секций расположены в положении, по меньшей мере частично перекрывающем друг друга относительно рабочей поверхности транспортного средства или рабочей машины, и образуют верхнюю секцию (9) и нижнюю секцию (10), причем
указанные верхняя секция и нижняя секция связаны друг с другом с возможностью перемещения относительно друг друга посредством по меньшей мере одного элемента (14), задающего траекторию, который обеспечивает криволинейную траекторию, при этом
нижняя секция содержит по меньшей мере ходовые элементы (5) для обеспечения возможности движения транспортного средства или рабочей машины, причем
элемент (14), задающий траекторию, выполнен обеспечивающим возможность движения верхней секции относительно нижней секции, при этом предусмотрено выполнение указанного движения по криволинейной траектории и в плоскости сечения, перпендикулярной продольной оси вращения (11) транспортного средства или рабочей машины, причем
указанная криволинейная траектория по меньшей мере на части своей длины имеет форму дуги окружности и проходит вокруг продольной оси вращения транспортного средства или рабочей машины, при этом
создание указанного движения предусмотрено посредством по меньшей мере одного исполнительного элемента (15), который установлен на транспортном средстве или рабочей машине и удерживается на верхней секции (9) и/или на нижней секции (10),
отличающаяся тем, что
транспортное средство или рабочая машина содержит по меньшей мере две секции, переднюю секцию (2) и заднюю секцию (6), которые расположены друг за другом в продольном направлении и соединены друг с другом посредством рамного шарнира (7) по меньшей мере с двумя степенями свободы,
при этом указанный рамный шарнир (7) обеспечивает возможность вращения шарнирно-сочлененных передней секции (2) и задней секции (6) относительно продольной оси (11) вращения транспортного средства или рабочей машины, а также относительно вертикальной оси (12), проходящей через рамный шарнир.
2. Система по п. 1, отличающаяся тем, что элементы (14), задающие траекторию, содержат, с одной стороны, криволинейный направляющий рельс (18), предусмотренный на верхней секции (9) и установленный по существу перпендикулярно оси вращения, а, с другой стороны, направляющие ролики (17), предусмотренные на нижней секции (10) и установленные на противоположных наружных краях (16), направление которых совпадает с направлением оси (11) вращения и которые предусмотрены с обеих сторон нижней секции, так что
ось вращения направляющих роликов (17) по существу параллельна оси (11) вращения, причем
направляющие ролики выполнены с возможностью взаимодействия с указанным по меньшей мере одним криволинейным направляющим рельсом (18).
3. Система по п. 2, отличающаяся тем, что криволинейный направляющий рельс (18) содержит два направляющих рельсовых сегмента, установленных на противоположных краях (16) верхней секции (9), причем направление указанных краев совпадает с направлением оси (11) вращения, при этом края расположены на обеих сторонах верхней секции.
4. Система по п. 2, отличающаяся тем, что криволинейный направляющий рельс (18) включает в себя непрерывный криволинейный направляющий рельсовый сегмент.
5. Система по п. 2, отличающаяся тем, что криволинейные направляющие рельсы (18) установлены на управляющем элементе (25), причем указанные криволинейные направляющие рельсы установлены на противоположных концах продолговатого управляющего элемента, при этом
управляющий элемент оснащен удерживающим механизмом (26), причем направляющий паз (27) выполнен с возможностью размещения в нем среднего ролика (28), выступающего от нижней секции для ограничения поперечного перемещения управляющего элемента.
6. Система по п. 1, отличающаяся тем, что элементы (14), задающие траекторию, содержат направляющий рельс (20) скольжения, проходящий до противоположных наружных краев (16) нижней секции (10), причем направление указанных краев совпадает с направлением оси (11) вращения, при этом края расположены на обеих сторонах нижней секции, так что
направляющий рельс скольжения выполнен по существу перпендикулярным оси вращения, причем
направляющий рельс (20) скольжения выполнен с возможностью взаимодействия с криволинейным направляющим рельсом (18), установленным на верхней секции (9), при этом
криволинейный направляющий рельс (11) выполнен по существу перпендикулярным оси вращения.
7. Система по п. 6, отличающаяся тем, что криволинейный направляющий рельс (18) содержит два криволинейных направляющих рельсовых сегмента, параллельных направляющему рельсу (20) скольжения и установленных на противоположных наружных краях (19) верхней секции (9), причем направление указанных краев совпадает с направлением оси (11) вращения, при этом края расположены на обеих ее сторонах.
8. Система по п. 6, отличающаяся тем, что криволинейный направляющий рельс (18) включает в себя непрерывный направляющий рельсовый сегмент, параллельный направляющему рельсу (20) скольжения.
9. Система по любому из предшествующих пунктов, отличающаяся тем, что исполнительный элемент (15) выполнен с возможностью совершения толкающего или тянущего движения.
10. Система по любому из предшествующих пунктов, отличающаяся тем, что передняя секция (2) и/или задняя секция (6) одновременно образуют нижнюю секцию (10).
11. Система по любому из пп. 1-8, отличающаяся тем, что транспортное средство или рабочая машина содержит по меньшей мере три секции: переднюю секцию (2), заднюю секцию (6) и по меньшей мере одну среднюю секцию (13), соединенные друг с другом посредством рамного шарнира (7), причем
по меньшей мере один из рамных шарниров (7) образует соединение по меньшей мере с двумя степенями свободы, которое обеспечивает возможность поворота шарнирно-сочлененных передней секции (2) и средней секции (13), средней секции (13) и задней секции (6) или двух соседних средних секций относительно по существу продольной оси (11) вращения транспортного средства или рабочей машины, а также относительно вертикальной оси (12), проходящей через рамный шарнир.
12. Система по п. 11, отличающаяся тем, что передняя секция (2), и/или средняя секция (13), и/или задняя секция (6) одновременно образуют нижнюю секцию (10).
13. Система по любому из предшествующих пунктов, отличающаяся тем, что содержит по меньшей мере:
измерительные инструменты (21) для определения составляющей момента, приложенного верхней секцией (9) к нижней секции (10), причем указанная составляющая преимущественно действует вокруг по существу продольной оси (11) вращения транспортного средства или рабочей машины,
инструменты (22) определения для определения величины и направления по меньшей мере одного поддерживающего момента, необходимого для стабилизации по меньшей мере нижней секции (10), на основе момента, приложенного верхней секцией (9) к нижней секции (10), которую необходимо поддерживать,
по меньшей мере один комплект исполнительных элементов (15) для создания поддерживающего момента, и
управляющие элементы (23) для управления указанным по меньшей мере одним исполнительным элементом (15) для обеспечения расчетного поддерживающего момента.
14. Система по любому из предшествующих пунктов, отличающаяся тем, что посредством изменения радиуса (R) кривизны криволинейной траектории, задаваемой элементами (14), задающими траекторию, предусмотрена возможность смещения положения оси (11) вращения, определенной элементами, задающими траекторию.
15. Система по п. 14, отличающаяся тем, что радиус (R) кривизны криволинейной траектории, задаваемой элементами (14), задающими траекторию, выбран таким образом, что
ось (11) вращения, определенная элементами, задающими траекторию, расположена ниже системы подвески ходовых элементов (5), предусмотренных в нижней секции; предпочтительно расположена вровень с рабочей поверхностью или ниже рабочей поверхности.
16. Система по любому из предшествующих пунктов, отличающаяся тем, что нижняя секция (10) и верхняя секция (9) сопряжены друг с другом посредством элементов (14), задающих траекторию, которые установлены между ними и выполнены в виде совместно используемого стабилизирующего модуля (24).
17. Система по п. 16, отличающаяся тем, что транспортное средство или рабочая машина выполнены с возможностью оснащения одним или более стабилизирующими модулями (24), соединенными друг с другом по существу жестким образом.
18. Способ для обеспечения возможности вращательного движения в транспортном средстве или передвижной рабочей машине, содержащих по меньшей мере две секции, в котором:
по меньшей мере две из указанных секций располагают в положении, по меньшей мере частично перекрывающем друг друга относительно рабочей поверхности транспортного средства или рабочей машины, образуя верхнюю секцию (9) и нижнюю секцию (10), причем
указанные верхнюю секцию и нижнюю секцию располагают с возможностью перемещения относительно друг друга посредством по меньшей мере одного элемента (14), задающего траекторию, обеспечивающего криволинейную траекторию, при этом
нижнюю секцию выполняют с возможностью размещения по меньшей мере ходовых элементов (5) для обеспечения возможности движения транспортного средства или рабочей машины, причем
посредством элемента (14), задающего траекторию, обеспечивают возможность движения верхней секции (9) относительно нижней секции (10) таким образом, чтобы указанное движение происходило по криволинейной траектории и в плоскости сечения, перпендикулярной продольной оси (11) вращения транспортного средства или рабочей машины, причем
предусматривают, чтобы указанная криволинейная траектория по меньшей мере на части своей длины имела форму дуги окружности с центром, расположенным ниже нижней секции (10), и проходила вокруг продольной оси вращения транспортного средства или рабочей машины, при этом
указанное движение элемента (14), задающего траекторию, создают посредством по меньшей мере одного исполнительного элемента (15), подлежащего установке на транспортном средстве или рабочей машине и удерживаемого на верхней секции (9) и/или на нижней секции (10),
отличающийся тем, что
транспортное средство или рабочую машину выполняют по меньшей мере из двух секций, передней секции (2) и задней секции (6), которые располагают друг за другом в продольном направлении и соединяют друг с другом посредством рамного шарнира (7) по меньшей мере с двумя степенями свободы таким образом, что
за счет рамного шарнира (7) обеспечивают возможность вращения шарнирно-сочлененных передней секции (2) и задней секции (6) относительно друг друга относительно продольной оси (11) вращения транспортного средства или рабочей машины, а также относительно вертикальной оси (12), проходящей через рамный шарнир.
19. Способ по п. 18, отличающийся тем, что элементы (14), задающие траекторию, выполняют:
посредством установки направляющих роликов (17) на противоположных наружных краях (16) нижней секции (9), при этом направление краев совпадает с направлением оси (11) вращения, причем края предусмотрены с ее обеих сторон, причем
ось вращения направляющих роликов (17) по существу параллельна оси (11) вращения, и
посредством оснащения верхней секции (9) криволинейным направляющим рельсом (18), по существу перпендикулярным относительно указанной оси вращения, причем
указанный криволинейный направляющий рельс (18) взаимодействует с направляющими роликами (17) таким образом, что
исполнительный элемент (15) приводит верхнюю секцию (9) в движение, что вызывает ее вращение, при этом
направляющий рельс поворачивается вокруг оси вращения под управлением направляющих роликов.
20. Способ по п. 18, отличающийся тем, что элементы (14), задающие траекторию, выполняют:
посредством установки направляющего рельса (20) скольжения, проходящего до противоположных наружных краев (16) нижней секции (9), причем направление краев совпадает с направлением оси вращения, при этом края расположены с ее обеих сторон, причем указанный направляющий рельс скольжения по существу перпендикулярен оси (11) вращения, и
посредством оснащения верхней секции (9) криволинейным направляющим рельсом (18), по существу перпендикулярным относительно указанной оси вращения и взаимодействующим с направляющим рельсом (20) скольжения таким образом, что
исполнительный элемент (14) приводит верхнюю секцию (9) в движение, что вызывает ее вращение, при этом
направляющий рельс поворачивается относительно оси вращения под управлением направляющего рельса скольжения.
21. Способ по любому из пп. 18-20, отличающийся тем, что транспортное средство или рабочая машина выполняют по меньшей мере из трех секций: передней секции (2), задней секции (6) и по меньшей мере одной средней секции (13), соединенных друг с другом посредством рамного шарнира (7), причем
по меньшей мере один из рамных шарниров (7) образует соединение по меньшей мере с двумя степенями свободы, что обеспечивает возможность поворота шарнирно-сочлененных передней секции (2) и средней секции (13), средней секции (13) и задней секции (6) или двух соседних средних секций относительно по существу продольной оси (11) вращения транспортного средства или рабочей машины, а также относительно вертикальной оси, проходящей через рамный шарнир, причем
передняя секция (2), и/или средняя секция (13), и/или задняя секция (6) одновременно образуют нижнюю секцию (10), при этом
при помощи измерительных инструментов определяют составляющую момента, приложенного верхней секцией (9) к нижней секции (10), причем указанная составляющая действует вокруг оси (11) вращения, направление которой по существу совпадает с направлением движения транспортного средства, причем на основе указанной составляющей
при помощи вычислительных инструментов на основе момента, приложенного верхней секцией (9) к нижней секции (10), определяют величину и направление по меньшей мере одного поддерживающего момента необходимого для стабилизации по меньшей мере нижней секции (10), и
посредством управляющих элементов осуществляют управление по меньшей мере одним исполнительным элементом (15) для создания расчетного поддерживающего момента.
| US 3160284 A, 08.12.1964 | |||
| Устройство для сортировки чисел | 1981 |
|
SU960800A1 |
| US 4679803 A, 14.07.1987 | |||
| Автопоезд для транспортировки длинномерных грузов | 1983 |
|
SU1092072A1 |

