Область техники, к которой относится изобретение
Настоящее изобретение относится к лесозаготовительным машинам и управлению лесозаготовительными машинами, и, в частности, к обнаружению объектов в рабочей среде лесозаготовительных машин.
Уровень техники
Лесозаготовительные машины часто используются на неровной местности посреди деревьев и других препятствий, причем обрабатываются длинные и тяжелые стволы деревьев. Оператор лесозаготовительной машины работает в ее кабине. Хотя кабины лесозаготовительных машин построены прочными и безопасными, стволы деревьев, которыми манипулирует лесозаготовительный рабочий узел, или другие объекты в окружающей среде лесозаготовительной машины, потенциально проникающие в кабину, создают риск для безопасности работы оператора.
Раскрытие сущности изобретения
Задачей настоящего изобретения является разработка нового управляющего устройства, способа, лесозаготовительной машины и компьютерного программного продукта. Эта задача решена с помощью способа управления, лесозаготовительной машины, способа и компьютерного программного продукта, которые характеризуются признаками, указанными в независимых пунктах формулы. Предпочтительные варианты осуществления изобретения раскрыты в зависимых пунктах формулы.
Решение основано на обнаружении объекта с помощью датчика и управляющего блока, который перемещается в сторону кабины в пределах предварительно заданной области, например, в непосредственной близости от кабины.
Преимущество такого способа и устройства заключается в том, что риск для безопасной работы оператора может быть обнаружен автоматически независимо от наблюдений оператора и без активных мер со стороны оператора.
Краткое описание чертежей
Изобретение теперь будет описано более подробно в связи с предпочтительными вариантами осуществления и со ссылкой на прилагаемые чертежи, среди которых:
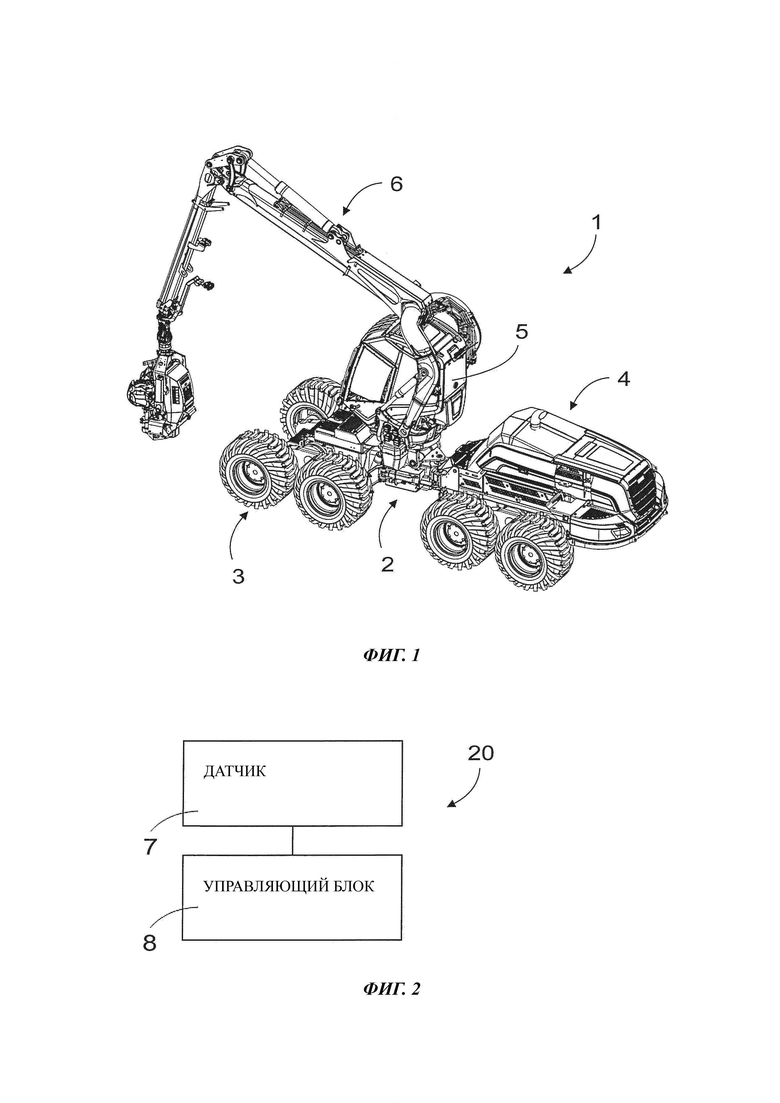
на фиг. 1 показана лесозаготовительная машина на виде в аксонометрии;
на фиг. 2 представлен схематический вид или способ управления в лесозаготовительной машине;
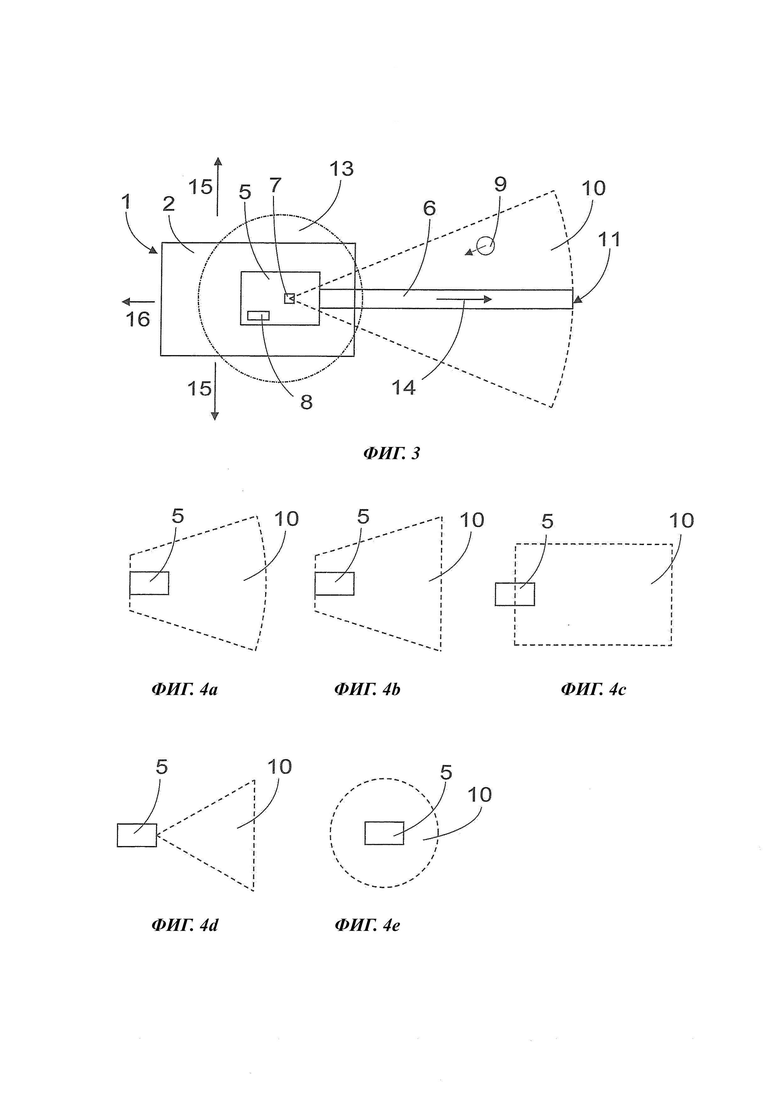
на фиг. 3 представлен схематический вид сверху лесозаготовительной машины, сектора и зоны безопасности;
на фиг. 4а, 4b, 4с, 4d и 4е представлены виды сверху секторов различной формы;
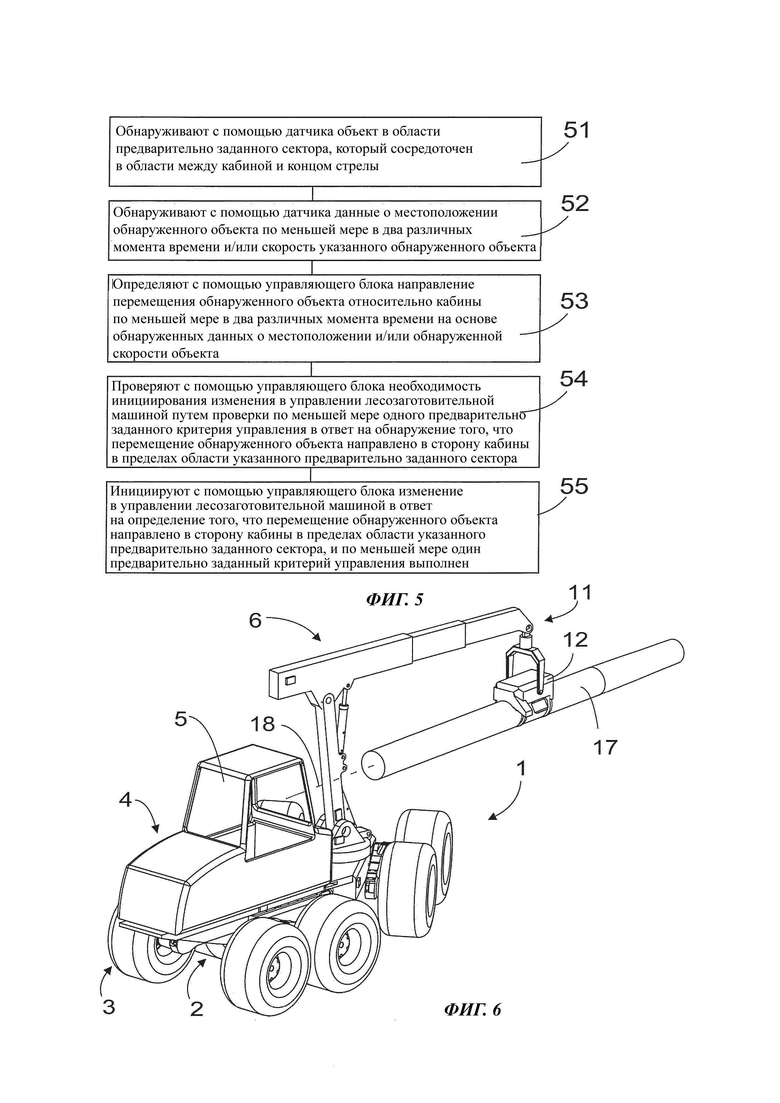
на фиг. 5 показан способ управления лесозаготовительной машиной;
на фиг. 6 представлен схематический вид лесозаготовительной машины в аксонометрии;
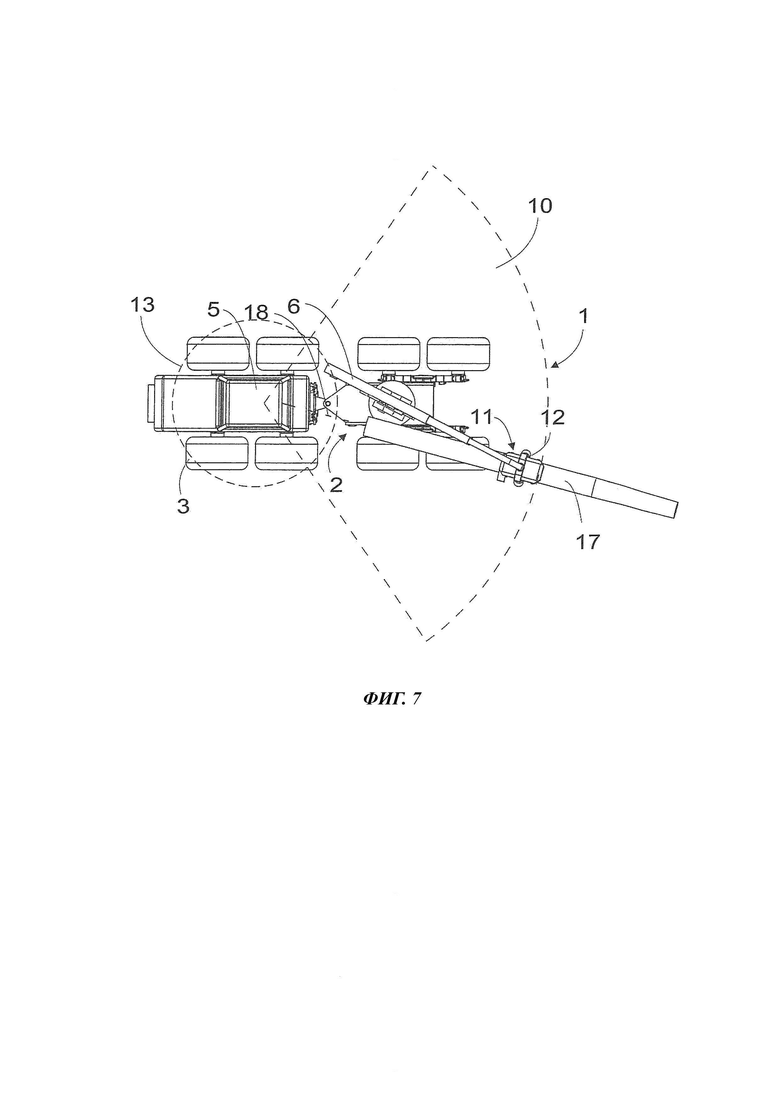
на фиг. 7 показана аналогичная лесозаготовительная машина 1 и ситуация, как и на фиг. 6, но на виде сверху.
Осуществление изобретения
На фиг. 1 показана лесозаготовительная машина 1 или, если точнее, харвестер. В различных вариантах осуществления лесозаготовительная машина 1 может представлять собой, например, харвестер по типу фиг. 1, форвардер или их комбинацию, то есть так называемую комбинированную машину, сучкорезно-раскряжевочную машину (т.н. процессор) или другую лесозаготовительную машину, известную как таковую.
Лесозаготовительная машина 1 может содержать несущую раму 2, которая может состоять из одной, двух или более корпусных частей, средств 3 перемещения, которые прикреплены к несущей раме 2, и которые могут представлять собой колеса, гусеницы, сдвоенные мосты, гусеничную систему или другие конструктивные части, известные как таковые и необходимые для перемещения лесозаготовительной машины, причем они могут быть выполнены с возможностью соединения с одной или несколькими корпусными частями в каждом конкретном случае. Лесозаготовительная машина 1 может дополнительно содержать первичный источник 4 энергии, гидравлическую систему (не имеет номера позиции), кабину 5, прикрепленную к несущей раме, и/или стрелу или стреловую конструкцию 6, прикрепленную к несущей раме или кабине. Кабина 5 и/или стрела/стреловая конструкция 6 могут быть выполнены с возможностью складывания и/или поворота относительно несущей рамы. В этом описании термин "стрела 6" также используется для обозначения стреловых конструкций, состоящих из более чем одной стрелы.
На фиг. 2 представлен схематический вид управляющего устройства 20 в лесозаготовительной машине 1. На фиг. 3 представлен схематический вид сверху лесозаготовительной машины, сектора и зоны безопасности. Лесозаготовительная машина может содержать по меньшей мере одну кабину 5 и по меньшей мере одну стрелу 6. Управляющая система может содержать по меньшей мере один датчик 7 и по меньшей мере один блок 8 управления.
Датчик 7 может быть выполнен с возможностью обнаружения по меньшей мере одного объекта 9 в области по меньшей мере одного предварительно заданного сектора 10. Сектор 10 преимущественно сосредоточен в области между кабиной 5 и концом 11 стрелы. Под концом 11 стрелы понимают конец стрелы или стреловой конструкции, который не адаптирован (не прикреплен) к лесозаготовительной машине 1. Другими словами, под концом 11 стрелы понимают конец, противоположный концу стрелы или стреловой конструкции, закрепленному на лесозаготовительной машине 1. На конце 11 стрелы может быть прикреплен инструмент 12, такой как харвестерная головка или захват.
В зависимости от варианта осуществления форма сектора 10 может представлять собой круговой сектор, как на фиг. 3, обрезанный круговой сектор, как на фиг. 4а, равнобедренную трапецию, как на фиг. 4b, прямоугольник, как на фиг. 4с, треугольник, как на фиг. 4d, или круг, как на фиг. 4е. Аналогично, сектор может представлять собой, как видно со стороны лесозаготовительной машины, например, круговой сектор, обрезанный круговой сектор, равнобедренную трапецию, прямоугольник, треугольник или круг. Сектор 10 может также проходить над кабиной 5 и/или стрелой 6. В различных вариантах осуществления сектор 10 может быть определен как находящийся полностью за пределами кабины 5, как показано на фиг. 4d, или частично покрывающий кабину 5, как показано на фиг. 3 и 4с, или полностью покрывающий кабину 5, как показано на фиг. 4а, 4b и 4е. Аналогично, как видно в боковом направлении, сектор 10 может быть определен как находящийся полностью за пределами кабины 5 или частично или полностью покрывающий кабину 5. Другими словами, кабина 5 может быть полностью или частично выполнена внутри сектора 10 или полностью за его пределами. Кроме того, сектор 10 может быть выполнен проходящим вокруг кабины 5, например, таким образом, что сектор 10 проходит на одну, две, три или четыре стороны от кабины 5 и/или над кабиной 5, но не доходит до области кабины.
В одном варианте осуществления сектор 10 может включать в себя всю область обнаружения датчика 7, другими словами, область, в которой находятся объекты 9, которые датчик может обнаружить. Другими словами, сектор 10 может включать в себя всю максимальную область обнаружения датчика 7 или всю область, которую датчик 7 может обследовать посредством задания, например, направлений измерения. Во втором варианте осуществления сектор 10 может включать в себя заданную часть максимальной области обнаружения датчика 7 или области, которую датчик 7 может обследовать.
Кроме того, датчик 7 может быть выполнен с возможностью обнаружения по меньшей мере одного из следующего: данных о местоположении обнаруженного объекта 9 по меньшей мере в два различных момента времени и скорости обнаруженного объекта 9. В одном варианте осуществления данные о местоположении объекта 9 могут включать в себя расстояние до объекта 9 от кабины 5, например, от внешнего края кабины, или расстояние до объекта 9 от конкретной точки измерения. Во втором варианте осуществления данные о местоположении объекта 9 могут включать в себя местоположение объекта 9 в одном, двух или трех измерениях относительно конкретной точки измерения или в предварительно заданной системе координат. Точка измерения может быть задана в кабине 5, например центральная точка кабины или предварительно заданная точка на внешнем краю кабины, на стреле 6, например конец 11 стрелы, выбранное соединение стрелы или другая точка на стреле, датчик 7 или другая подходящая точка на лесозаготовительной машине 1. В одном варианте осуществления датчик 7 может быть выполнен с возможностью определения скорости объекта 9, например скорости относительно кабины 5, стрелы 6, конца 11 стрелы, несущей платформы 2 лесозаготовительной машины или окружения лесозаготовительной машины 1, или другой точки измерения или системы координат.
Управляющий блок 8 может быть выполнен с возможностью определения по меньшей мере направления перемещения указанного обнаруженного объекта 9 относительно кабины 5. Определенное направление перемещения может включать в себя, например, информацию о том, движется ли объект 9 к кабине 5 или от нее. Направление перемещения объекта 9 относительно кабины может быть определено на основе данных о местоположении объекта, обнаруженного по меньшей мере в два момента времени, и/или обнаруженной скорости объекта.
Следует отметить, что объект 9 можно считать перемещающимся относительно кабины 5, когда объект 9 перемещается, а кабина 5 неподвижна, когда кабина 5 перемещается, а объект 9 неподвижен, или когда объект 9 и кабина 5 перемещаются в разных направлениях и/или с разной скоростью. Другими словами, объект 9 может рассматриваться как перемещающийся к кабине 5 также в ситуации, в которой объект 9 неподвижен, а кабина 5 перемещается относительно него, например, в сторону объекта 9.
Управляющий блок 8 может быть выполнен с возможностью проверки необходимости инициирования изменения в управлении лесозаготовительной машиной 1 путем проверки по меньшей мере одного предварительно заданного критерия управления в ответ на обнаружение того, что перемещение обнаруженного объекта 9 направлено в сторону кабины 5 в пределах области указанного предварительно заданного сектора 10. Кроме того, управляющий блок 8 может быть выполнен с возможностью инициирования изменения в управлении лесозаготовительной машиной 1 в ответ на обнаружение того, что перемещение обнаруженного объекта 9 направлено в сторону кабины 5 в пределах области указанного предварительно заданного сектора 10 и в ответ на то, что по меньшей мере один предварительно заданный критерий выполнен. В одном варианте осуществления перемещение можно считать направленным в сторону кабины 5 в пределах области сектора 10, если по меньшей мере последнее обнаруженное местоположение объекта 9 находится, по меньшей мере частично, в пределах сектора 10. В одном варианте осуществления перемещение можно считать направленным в сторону кабины 5 в пределах области сектора 10, если вместо этого или в дополнение к этому объект 9 был обнаружен в пределах области сектора 10 и либо расстояние до объекта 9 относительно кабины 5 стало короче, либо направление перемещения объекта таково, что расстояние от объекта 9 до кабины 5 становится короче. В еще одном варианте осуществления перемещение можно считать направленным в сторону кабины 5 в пределах области сектора 10, если направление перемещения объекта 9 относительно кабины таково, что, если бы перемещение продолжалось без изменений, объект 9 ударился бы о кабину 5.
Таким образом, в зависимости от варианта осуществления опорная точка может представлять собой точку, относительно которой определяют расстояние до объекта 9 от кабины, точку измерения или нулевую точку системы координат. Если опорная точка не является неподвижной относительно кабины 5, можно определить, в дополнение к данным о местоположении объекта 9, также данные о местоположении кабины 5 относительно опорной точки. В таком случае данные о местоположении объекта 9 относительно кабины 5 могут быть определены на основе данных о местоположении объекта 9 и кабины 5, например, в управляющем блоке 8, и/или скорость объекта 9 относительно кабины 5 может быть определена из данных о скорости объекта 9 и кабины 5 относительно опорной точки, например, в управляющем блоке.
В одном варианте осуществления управляющий блок 8 может быть дополнительно выполнен с возможностью определения угла обнаруженного направления перемещения относительно кабины. В таком случае управляющий блок 8 может быть выполнен с возможностью определения направления перемещения объекта 9 и угла этого направления перемещения по меньшей мере в одной плоскости относительно кабины 5, например центральной точки кабины 5, ближайшей точки внешнего края кабины 5 относительно объекта или другой подходящей точки измерения.
В одном варианте осуществления управляющий блок 8 может быть выполнен с возможностью определения скорости перемещения обнаруженного объекта 9 относительно кабины 5. Скорость объекта 9 относительно кабины 5 может быть определена в дополнение к направлению перемещения объекта 9, а также в дополнение к определению угла направления перемещения или вместо него.
В одном варианте осуществления управляющий блок 8 может быть выполнен с возможностью инициирования изменения в управлении лесозаготовительной машиной 1 в ответ на то, что определенная скорость перемещения обнаруженного объекта 9 относительно кабины превышает скорость, считающуюся безопасной. Такая скорость, которая считается безопасной, может представлять собой скорость, считающуюся безопасной в стандартной или справочной литературе, относящейся к безопасности машин, или скорость, которая была определена на основе скорости подачи обнаруженного объекта, например ствола, среднего времени реакции пользователя и/или расстояния между кабиной 5 и обнаруженным объектом, например концом 11 стрелы, например среднего положения использования кабины 5 и конца 11 стрелы, или положения использования в опорное (контрольное) время. Определение может быть выполнено, например, таким образом, что, если скорость и расстояние обнаруженного объекта относительно кабины таковы, что у пользователя нет времени после обнаружения объекта предотвратить потенциальное проникновение объекта в кабину, управляющий блок 8 может инициировать изменение в управлении лесозаготовительной машиной для предотвращения такого проникновения.
В одном варианте осуществления управляющий блок 8 может быть выполнен с возможностью инициирования изменения в управлении лесозаготовительной машиной 1 в ответ на то, что определенная скорость обнаруженного объекта 9 относительно кабины составляет по меньшей мере 3 м/с. Во втором варианте осуществления управляющий блок 8 может быть выполнен с возможностью инициирования изменения в управлении лесозаготовительной машиной 1 в ответ на то, что определенная скорость обнаруженного объекта 9 относительно кабины, составляет по меньшей мере 4 м/с. В третьем варианте осуществления управляющий блок 8 может быть выполнен с возможностью инициирования изменения в управлении лесозаготовительной машиной 1 в ответ на то, что определенная скорость обнаруженного объекта 9 относительно кабины, составляет по меньшей мере 5 м/с. В этих вариантах осуществления определенная скорость объекта 9 относительно кабины 5 может в таком случае образовывать критерий управления или по меньшей мере один из критериев управления, и этот критерий управления может считаться выполненным, когда скорость по меньшей мере равна предварительно заданной, например по меньшей мере 3 м/с, 4 м/с или 5 м/с.
В одном варианте осуществления по меньшей мере один датчик 7 может быть выполнен с возможностью обнаружения по меньшей мере одного размера обнаруженного объекта 9. В одном варианте осуществления по меньшей мере один размер обнаруженного объекта 9 может быть определен, в дополнение к датчику 7 или вместо него, в управляющем блоке 8, на основе информации, составленной, например, датчиком 7. Размер объекта 9 может включать в себя высоту, длину и/или ширину объекта 9, наблюдаемого с направления кабины 5, наблюдаемой с опорной точки и/или в предварительно заданной системе координат, такой как система координат, используемая при определении данных о местоположении. В одном варианте осуществления управляющий блок 8 может быть выполнен с возможностью инициирования изменения в управлении лесозаготовительной машиной 1 в ответ на то, что размер обнаруженного объекта 9 составляет по меньшей мере 5 см. В некоторых других вариантах осуществления управляющий блок 8 может быть выполнен с возможностью инициирования изменения в управлении лесозаготовительной машиной 1 в ответ на то, что размер обнаруженного объекта 9 составляет по меньшей мере 1,5 см или 3 см. В этих вариантах осуществления по меньшей мере один размер объекта 9 может в этом случае формировать критерий управления или по меньшей мере один из критериев управления, и этот критерий управления может считаться выполненным, когда размер по меньшей мере равен предварительно заданному, например по меньшей мере 1,5 см, по меньшей мере 3 см или по меньшей мере 5 см.
В одном варианте осуществления управляющий блок 8 может быть выполнен с возможностью инициирования изменения в управлении лесозаготовительной машиной 1 путем формирования по меньшей мере одной управляющей команды, выполненной с возможностью воздействия на управление лесозаготовительной машиной 1.
В одном варианте осуществления изменение управления лесозаготовительной машиной 1 может включать в себя замедление или остановку подающих роликов, по меньшей мере одного исполнительного элемента приводной передачи, по меньшей мере одного исполнительного элемента стрелы или другой функции лесозаготовительной машины, или работы исполнительного элемента. В одном варианте осуществления изменение в управлении лесозаготовительной машиной может быть постепенным, причем работа сначала замедляется немного, затем постепенно (или плавно) больше, пока работа, наконец, не будет остановлена. В таких вариантах осуществления по меньшей мере один критерий управления может аналогичным образом иметь одну, две или более стадий или одно, два или более пороговых значений. В таком случае любая из вышеупомянутых операций может быть, например, замедлена при превышении первого порогового значения критерия управления, и операция может быть остановлена при превышении второго порогового значения критерия управления, или операция может быть замедлена при превышении первого порогового значения критерия управления, и операция может быть замедлена еще больше при превышении второго порогового значения. В этом случае определенная скорость объекта 9 относительно кабины 5 может иметь, например, одно, два или более пороговых значений, таких как первое пороговое значение 3 м/с и второе пороговое значение 4 м/с или 5 м/с. Соответственно, размер объекта 9 может иметь два или три пороговых значения, таких как 1,5 см, 3 см и/или 5 см, или другие соответствующие пороговые значения, которые могут составлять первое пороговое значение и/или второе пороговое значение.
В одном варианте осуществления по меньшей мере один датчик 7, 7' выполнен с возможностью обнаружения по меньшей мере одного объекта 9, 9', который не является конструктивной частью лесозаготовительной машины 1, в пределах области предварительно заданной зоны 13 безопасности. Датчик, с помощью которого обнаруживают объект 9 в пределах области зоны 13 безопасности, может представлять собой тот же датчик 7, с помощью которого обнаруживают объект или объекты в области сектора 10, или отдельный датчик 7'. Соответственно, объект, обнаруживаемый в пределах области зоны безопасности, может представлять собой тот же объект 9, что обнаруживают в области сектора 10, или другой объект 9'. В одном варианте осуществления зона безопасности может по меньшей мере частично отличаться от предварительно заданной области сектора 10. Другими словами, в одном варианте осуществления зона 13 безопасности и сектор 10 могут по меньшей мере частично перекрываться, и/или зона 13 безопасности может включать в себя по меньшей мере часть области сектора 10. В одном варианте осуществления зона 13 безопасности может быть расположена полностью внутри сектора 10, включающего в себя часть сектора 10. В одном варианте осуществления зона 13 безопасности может включать в себя весь сектор 10, то есть зона 13 безопасности и сектор 10 могут быть равны.
В одном варианте осуществления предварительно заданная зона 13 безопасности включает в себя область, проходящую на расстояние 1,5 метра от кабины 5 лесозаготовительной машины. Зона 13 безопасности в этом случае может проходить на расстояние 1,5 метра от кабины 5 лесозаготовительной машины при измерении в горизонтальной плоскости или при измерении расстояния от объекта 9, 9' до точки кабины 5, ближайшей к объекту 9, 9', или до предварительно заданной точки измерения.
В одном варианте осуществления по меньшей мере один управляющий блок 8 может быть выполнен с возможностью инициирования изменения в управлении лесозаготовительной машиной 1 в ответ на обнаружение датчиком 7, 7' объекта 9, 9', не принадлежащего лесозаготовительной машине 1, в зоне безопасности. В одном варианте осуществления управляющий блок 8 может быть выполнен с возможностью инициирования остановки работы лесозаготовительной машины 1 в ответ на обнаружение объекта 9, 9', который не является конструктивной частью лесозаготовительной машины 1, в области зоны 13 безопасности. В этом контексте остановка работы лесозаготовительной машины не означает остановку работы лесозаготовительной машины 1 или ее управляющей системы, например управляющего блока. Вместо этого под остановкой работы, в зависимости от варианта осуществления и типа обнаруженного объекта 9, 9', понимают остановку подающих роликов, управление приводной передачей для остановки приводного перемещения лесозаготовительной машины 1 или управление стрелой 6 для остановки объекта 9, 9', например ствола 17, прикрепленного к стреле.
В одном варианте осуществления по меньшей мере один датчик 7, 7' может содержать по меньшей мере одно из следующего: лидар, камеру, машинное зрение, ультразвуковое измерительное устройство и радар. Камера может представлять собой так называемую времяпролетную камеру или ToF-камеру (от англ. Time of Flight), с помощью которой может быть сформировано двумерное изображение или данные о расстоянии, относящиеся к его точкам. Датчик 7, 7' может также включать в себя комбинацию камеры, формирующей обычное двумерное изображение, и устройства, подходящего для измерения расстояний. В еще одном варианте осуществления, в котором датчик 7, 7' включает в себя камеру, определение местоположения или скорости объекта 9, 9' может быть основано, например, на изменении размера объекта 9, 9' в изображении камеры и/или отношения к другому идентифицированному фрагменту в шаблоне.
В одном варианте осуществления по меньшей мере один указанный датчик 7, 7' адаптирован по меньшей мере к одному из следующего: прикреплен к окну кабины, над кабиной снаружи кабины, к верхней части кабины внутри кабины, корпусу лесозаготовительной машины, стреле лесозаготовительной машины, передней части корпуса лесозаготовительной машины, задней части корпуса лесозаготовительной машины и к конструкции, внешней по отношению к лесозаготовительной машине и перемещающейся вместе с лесозаготовительной машиной.
В одном варианте осуществления предварительно заданный сектор 10 направлен от кабины лесозаготовительной машины в сторону по меньшей мере основного рабочего направления 14 стрелы 6, как показано на фиг. 3 и 4а-4е. Под основным рабочим направлением стрелы 6 понимают направление, в котором по большей части выполняется работа стрелы или стреловой конструкции в нейтральном положении кабины 5. Под нейтральным положением кабины 5 понимают, например, нормальное, невращательное направление кабины 5 во время транспортировки. Основное рабочее направление стрелы 6 в нейтральном положении кабины проходит вперед, если смотреть из кабины 5 или с места (сиденья) оператора (не показано), предусмотренного в кабине, то есть вперед от оператора, сидящего на своем месте.
В одном варианте осуществления основное рабочее направление стрелы 6 может проходить от кабины 5 к концу 11 стрелы. Таким вариантом осуществления может быть вариант осуществления, в котором сектор 10 задан относительно направления кабины 5, например вращающейся кабины, и/или стрелы 6, в результате чего сектор 10 вращается вместе с кабиной 5 и/или стрелой 6.
В одном варианте осуществления предварительно заданный сектор 10 дополнительно направлен от кабины 5 лесозаготовительной машины по меньшей мере к двум поперечным сторонам 15 относительно основного рабочего направления стрелы, как, например, на фиг. 4а, 4b, 4 с и 4е. В одном варианте осуществления предварительно заданный сектор 10 дополнительно направлен из кабины лесозаготовительной машины к противоположному направлению 16 относительно основного рабочего направления 14 стрелы, как, например, на фиг. 4е.
В одном варианте осуществления указанный предварительно заданный сектор проходит на расстояние по меньшей мере 15 метров от кабины 5 лесозаготовительной машины 5 по меньшей мере в одном направлении 14, 15, 16.
В одном варианте осуществления предварительно заданный сектор 10 проходит по существу на расстояние, соответствующее досягаемости стрелы 6 от кабины 5 лесозаготовительной машины.
На фиг. 5 показан способ управления лесозаготовительной машиной. Лесозаготовительная машина 1 может содержать по меньшей мере одну кабину 5 и по меньшей мере одну стрелу 6. В указанном способе с помощью по меньшей мере одного датчика 7 обнаруживают 51 по меньшей мере один объект 9 в пределах области по меньшей мере одного предварительно заданного сектора 10. Сектор 10 может быть сосредоточен в области между кабиной и концом 11 стрелы.
Кроме того, в способе с помощью датчика 7 обнаруживают 52 по меньшей мере одно из следующего: данные о местоположении указанного обнаруженного объекта 9 по меньшей мере в два момента времени и скорость указанного обнаруженного объекта 9.
Кроме того, в способе с помощью по меньшей мере одного управляющего блока 8 определяют 53 по меньшей мере направление перемещения указанного обнаруженного объекта 9 относительно кабины 5 на основе данных о местоположении указанного обнаруженного объекта 9 по меньшей мере в два момента времени и/или обнаруженной скорости объекта 9.
Кроме того, в способе проверяют 54 необходимость инициирования изменения в управлении лесозаготовительной машиной 1 путем проверки по меньшей мере одного предварительно заданного критерия управления в ответ на обнаружение того, что перемещение обнаруженного объекта 9 направлено в сторону кабины 5 в пределах области указанного предварительно заданного сектора 10.
Кроме того, в способе инициируют 55 изменение в управлении лесозаготовительной машиной 1 с помощью управляющего блока в ответ на определение того, что перемещение обнаруженного объекта 9 направлено в сторону кабины 5 в пределах области указанного предварительно заданного сектора 10, и указанный по меньшей мере один предварительно заданный критерий управления выполнен. Другими словами, изменение в управлении лесозаготовительной машиной 1 в таком случае может быть осуществлено только тогда, когда определено, что перемещение обнаруженного объекта 9 направлено в сторону кабины 5 в пределах области указанного предварительно заданного сектора 10, и, кроме того, указанный по меньшей мере один предварительно заданный критерий управления выполнен. В одном варианте осуществления изменение в управлении лесозаготовительной машиной 1 может быть осуществлено только тогда, когда определено, что перемещение обнаруженного объекта 9 направлено в сторону кабины 5 в пределах области указанного предварительно заданного сектора 10 по существу в то же время, в которое выполнен указанный по меньшей мере один предварительно заданный критерий управления.
В одном варианте осуществления в способе дополнительно обнаруживают с помощью по меньшей мере одного датчика 7, 7' по меньшей мере один объект 9, 9', который не является конструктивной частью лесозаготовительной машины 1, в области предварительно заданной зоны 13 безопасности. В этом случае по меньшей мере один управляющий блок 8 может быть использован для инициирования изменения в управлении лесозаготовительной машиной 1 в ответ на обнаружение датчиком 7, 7' указанного объекта 9, 9', не принадлежащего лесозаготовительной машине 1, в зоне безопасности. В одном варианте осуществления зона 13 безопасности может по меньшей мере частично отличаться от предварительно заданной области сектора 10.
На фиг. 6 представлен схематический вид лесозаготовительной машины в аксонометрии. Лесозаготовительная машина может соответствовать по своим основным частям одной из лесозаготовительных машин 1, раскрытых в настоящем описании. Лесозаготовительная машина на фиг. 6 представляет собой харвестер, в различных вариантах осуществления лесозаготовительная машина 1 может представлять собой погрузочную машину/форвардер, комбинированную машину, процессор или другую лесозаготовительную машину, известную как таковую. На фиг. 6 к стреле 6 лесозаготовительной машины 1 прикреплен инструмент 12. Инструмент 12 в некоторых вариантах осуществления может представлять собой инструмент, подходящий, например, для захвата ствола 17 и/или для осуществления манипуляций с ним, например харвестерную головку или захват. Ствол 17 в этом случае может образовывать объект 9, 9', если он во время его захвата и/или осуществления манипуляций с ним оказывается в области предварительно заданного сектора 10 и/или зоны 13 безопасности. На фиг. 6 показан пример ситуации, когда продольная ось 18 ствола направлена в сторону кабины. 5. Если ствол 17 перемещается в данном случае, например, в направлении своей продольной оси 18 или в другом направлении, так что расстояние между стволом 17 и кабиной 5 уменьшается, ствол 17 может образовывать обнаруженный объект 9, и его перемещение можно считать направленным в сторону кабины 5. Ствол 17, который, как упоминалось выше, также может образовывать обнаруженный объект, может перемещаться в сторону кабины 5 либо так, чтобы кабина 5 перемещалась, а ствол 17 оставался на месте, так, чтобы ствол 17 перемещался вместе со стрелой 6 в сторону кабины 5, либо так, чтобы ствол 17 подавался инструментом 12, таким как харвестерная головка, в сторону кабины 5.
На фиг. 7 показана аналогичная лесозаготовительная машина 1 и ситуация, как и на фиг. 6, но на виде сверху. На фиг. 7 также показаны сектор 10 и зона 7 безопасности, в соответствии с одним вариантом осуществления.
Один вариант осуществления включает в себя компьютерный программный продукт, который содержит программный код, который при исполнении в процессоре, например управляющем блоке 8, побуждает управляющее устройство, раскрытое в настоящем описании и/или на фигурах, выполнять способ или по меньшей мере некоторые из этапов такого способа, раскрытого в настоящем описании и/или на фигурах.
В одном варианте осуществления лесозаготовительная машина 1 содержит любое из управляющих устройств, раскрытых в настоящем описании и/или на фигурах.
Специалист в данной области техники найдет очевидным, что по мере развития технологий основная идея изобретения может быть реализована многими различными способами. Таким образом, изобретение и его варианты осуществления не ограничены вышеописанными примерами, но могут варьироваться в пределах объема формулы изобретения.
Группа изобретений относится к управлению лесозаготовительными машинами, в частности к обнаружению объектов в рабочей среде лесозаготовительных машин. Управляющее устройство содержит по меньшей мере один датчик. Датчик выполнен с возможностью обнаружения по меньшей мере одного объекта в области по меньшей мере одного предварительно заданного сектора, сосредоточенного в области между управляющей кабиной и концом стрелы, и с возможностью обнаружения по меньшей мере одного из следующего: информации о местоположении указанного обнаруженного объекта по меньшей мере в два различных момента времени и скорости указанного обнаруженного объекта. Управляющее устройство дополнительно содержит по меньшей мере один управляющий блок, выполненный с возможностью определения по меньшей мере направления перемещения указанного обнаруженного объекта относительно управляющей кабины по меньшей мере в два различных момента времени на основе обнаруженной информации о местоположении и/или обнаруженной скорости объекта, и инициирования изменения в управлении лесозаготовительной машиной в ответ на обнаружение того, что перемещение обнаруженного объекта направлено в сторону управляющей кабины в области сектора. Повышается безопасность работы оператора. 3 н. и 18 з.п. ф-лы, 7 ил.
1. Управляющее устройство лесозаготовительной машины, содержащей по меньшей мере одну кабину и по меньшей мере одну стрелу, отличающееся тем, что устройство содержит: по меньшей мере один датчик, выполненный с возможностью обнаружения по меньшей мере одного объекта в области по меньшей мере одного предварительно заданного сектора, который сосредоточен в области между кабиной и концом стрелы, и который дополнительно выполнен с возможностью обнаружения по меньшей мере одного из следующего: данных о местоположении указанного обнаруженного объекта по меньшей мере в два различных момента времени и скорости указанного обнаруженного объекта, а также по меньшей мере один управляющий блок, выполненный с возможностью определения по меньшей мере направления перемещения указанного обнаруженного объекта относительно кабины по меньшей мере в два различных момента времени на основе обнаруженной информации о местоположении и/или обнаруженной скорости объекта, проверки необходимости инициирования изменения в управлении лесозаготовительной машиной путем проверки предварительно заданного критерия управления в ответ на обнаружение того, что перемещение обнаруженного объекта направлено в сторону кабины в области указанного предварительно заданного сектора, и инициирования изменения в управлении лесозаготовительной машиной в ответ на обнаружение того, что перемещение обнаруженного объекта направлено в сторону кабины в области предварительно заданного сектора и выполнение указанного по меньшей мере одного предварительно заданного критерия управления.
2. Управляющее устройство по п. 1, в котором управляющий блок дополнительно выполнен с возможностью определения угла направления перемещения обнаруженного объекта относительно кабины.
3. Управляющее устройство по п. 1 или 2, в котором управляющий блок дополнительно выполнен с возможностью определения скорости перемещения обнаруженного объекта относительно кабины.
4. Управляющее устройство по п. 3, в котором скорость перемещения обнаруженного объекта относительно кабины образует по меньшей мере один из указанных критериев управления, при этом управляющий блок выполнен с возможностью инициирования изменения в управлении лесозаготовительной машиной в ответ на то, что определенная скорость обнаруженного объекта относительно кабины составляет по меньшей мере 3 м/с.
5. Управляющее устройство по любому из пп. 1-4, в котором по меньшей мере один датчик дополнительно выполнен с возможностью обнаружения по меньшей мере одного размера обнаруженного объекта.
6. Управляющее устройство по любому из пп. 1-5, в котором управляющий блок выполнен с возможностью инициирования изменения в управлении лесозаготовительной машиной путем формирования по меньшей мере одной управляющей команды, выполненной с возможностью воздействия на управление лесозаготовительной машиной.
7. Управляющее устройство по любому из пп. 1-6, в котором по меньшей мере один датчик выполнен с возможностью обнаружения по меньшей мере одного объекта, который не является конструктивной частью лесозаготовительной машины, в пределах области предварительно заданной зоны безопасности, и при этом по меньшей мере один управляющий блок выполнен с возможностью инициирования изменения в управлении лесозаготовительной машиной в ответ на обнаружение датчиком указанного объекта, не принадлежащего лесозаготовительной машине, в зоне безопасности.
8. Управляющее устройство по п. 7, в котором указанная зона безопасности по меньшей мере частично отличается от области предварительно заданного сектора.
9. Управляющее устройство по п. 7 или 8, в котором указанная предварительно заданная зона безопасности включает в себя область, проходящую на расстояние 1,5 метра от кабины лесозаготовительной машины.
10. Управляющее устройство по любому из пп. 7-9, в котором управляющий блок выполнен с возможностью инициирования остановки работы лесозаготовительной машины в ответ на обнаружение объекта, который не является конструктивной частью лесозаготовительной машины, в области зоны безопасности.
11. Управляющее устройство по любому из пп. 1-10, в котором по меньшей мере один датчик содержит по меньшей мере одно из следующего: лидар, камеру, машинное зрение, ультразвуковое измерительное устройство и радар.
12. Управляющее устройство по любому из пп. 1-11, в котором по меньшей мере один указанный датчик адаптирован по меньшей мере к одному из следующего: прикреплен к окну кабины, над кабиной снаружи кабины, к верхней части кабины внутри кабины, корпусу лесозаготовительной машины, стреле лесозаготовительной машины, передней части корпуса лесозаготовительной машины, задней части корпуса лесозаготовительной машины и к конструкции, внешней по отношению к лесозаготовительной машине и перемещающейся вместе с лесозаготовительной машиной.
13. Управляющее устройство по любому из пп. 1-12, в котором указанный предварительно заданный сектор направлен от кабины лесозаготовительной машины по меньшей мере в сторону основного рабочего направления стрелы.
14. Управляющее устройство по п. 13, в котором указанный предварительно заданный сектор дополнительно направлен от кабины лесозаготовительной машины по меньшей мере в две поперечные стороны относительно основного рабочего направления стрелы.
15. Управляющее устройство по п. 14, в котором указанный предварительно заданный сектор дополнительно направлен от кабины лесозаготовительной машины в противоположном направлении по отношению к основному рабочему направлению стрелы.
16. Управляющее устройство по любому из пп. 1-15, в котором указанный предварительно заданный сектор проходит на расстояние по меньшей мере 15 метров от кабины лесозаготовительной машины.
17. Управляющее устройство по любому из пп. 1-15, в котором указанный предварительно заданный сектор проходит по существу на расстояние, соответствующее досягаемости стрелы от кабины лесозаготовительной машины.
18. Способ управления лесозаготовительной машиной, содержащей по меньшей мере одну кабину и по меньшей мере одну стрелу, отличающийся тем, что содержит следующие шаги: обнаруживают с помощью по меньшей мере одного датчика по меньшей мере один объект в области по меньшей мере одного предварительно заданного сектора, который сосредоточен в области между кабиной и концом стрелы, обнаруживают с помощью указанного датчика по меньшей мере одно из следующего: данные о местоположении указанного обнаруженного объекта по меньшей мере в два различных момента времени и скорость указанного обнаруженного объекта, определяют с помощью по меньшей мере одного управляющего блока по меньшей мере направление перемещения указанного обнаруженного объекта относительно кабины по меньшей мере в два различных момента времени на основе обнаруженной информации о местоположении и/или обнаруженной скорости объекта, проверяют с помощью управляющего блока необходимость инициирования изменения в управлении лесозаготовительной машиной путем проверки по меньшей мере одного предварительно заданного критерия управления в ответ на обнаружение того, что перемещение обнаруженного объекта направлено в сторону кабины в пределах области указанного предварительно заданного сектора, инициируют с помощью управляющего блока изменение в управлении лесозаготовительной машиной в ответ на обнаружение того, что перемещение обнаруженного объекта направлено в сторону кабины в пределах области указанного предварительно заданного сектора, и выполнен указанный по меньшей мере один предварительно заданный критерий управления.
19. Способ по п. 18, в котором далее обнаруживают с помощью по меньшей мере одного датчика по меньшей мере один объект, который не является конструктивной частью лесозаготовительной машины, в пределах области предварительно заданной зоны безопасности, которая по меньшей мере частично отличается от области предварительно заданного сектора, и инициируют с помощью по меньшей мере одного управляющего блока изменение в управлении лесозаготовительной машиной в ответ на обнаружение датчиком указанного объекта, не принадлежащего лесозаготовительной машине, в зоне безопасности.
20. Способ по п. 19, в котором указанная зона безопасности по меньшей мере частично отличается от области предварительно заданного сектора.
21. Лесозаготовительная машина, отличающаяся тем, что она содержит управляющее устройство по любому из пп. 1-17.
| US 20180179734 A1, 28.06.2018 | |||
| JP 2012019702 A, 02.02.2012 | |||
| JP 2001064992 A, 13.03.2001 | |||
| JP 2009121175 A, 04.06.2009 | |||
| СПОСОБ УПРАВЛЕНИЯ ИСТОЧНИКОМ МОЩНОСТИ МАШИНЫ, ИСПОЛЬЗУЕМОЙ В ЛЕСНОМ ХОЗЯЙСТВЕ | 2006 |
|
RU2429363C2 |
| СИСТЕМА УПРАВЛЕНИЯ РАБОЧИМИ ЛАМПАМИ В ЛЕСОТЕХНИЧЕСКОЙ МАШИНЕ | 2014 |
|
RU2650396C2 |

