Область техники, к которой относится изобретение
[1] Один или более вариантов осуществления относятся к пылесосу, который выполняет прямолинейное перемещение и изменение направления.
Уровень техники
[2] Пылесос представляет собой устройство, которое всасывает воздух, используя всасывающую силу, генерируемую вентилятором и двигателем, и фильтрует инородный материал из всасываемого воздуха для выполнения очистки.
[3] Пылесос включает в себя пылесборник для фильтрации инородного материала из всасываемого воздуха, используя заданное фильтрующее устройство. Пористый фильтровальный узел для принудительной фильтрации инородного материала из воздуха, когда воздух проходит через пористый фильтр или пылесборный узел циклонного типа для фильтрации инородного материала из воздуха во время вихревого потока воздуха, может использоваться в качестве фильтрующего устройства.
[4] Пылесос включает в себя основной корпус, включающий в себя пылесборник для отделения и сбора инородного материала из воздуха, всасывающий сопловой узел для всасывания инородного материала, например пыли, с пола, при перемещении по полу, и соединительную трубку для направления инородного материала, всасываемого всасывающим сопловым узлом, в основной корпус.
[5] Всасывающий сопловой узел включает в себя всасывающую головку, рукояточную трубку и удлинительную трубку, присоединенную между рукояточной трубкой и всасывающей головкой. Всасывающая головка может всасывать инородный материал с поверхности, подлежащей очистке, при контакте с поверхностью. Рукояточная трубка соединена с всасывающей головкой для манипулирования пользователем. Рукояточная трубка и всасывающая головка соединены друг с другом через посредство удлинительной трубки. Пользователь может выполнять очистку при удерживании рукояточной трубки, соединенной с всасывающей головкой.
[6] Основной корпус и всасывающий сопловой узел могут соединяться друг с другом посредством соединительной трубки. Одна сторона соединительной трубки может соединяться с всасывающим сопловым узлом, а другая сторона соединительной трубки может соединяться с основным корпусом. Гибкий шланг может использоваться в качестве соединительной трубки.
[7] Основной корпус включает в себя устройство для всасывания воздуха для генерирования всасывающей силы. Пылесос предусмотрен на одной его стороне с монтажным узлом для контейнера для сбора пыли, на который монтируется контейнер для сбора пыли. Основной корпус может быть предусмотрен с узлом колес для перемещения основного корпуса.
Сущность изобретения
Техническая задача
[8] В традиционном пылесосе ходовые колеса предусмотрены на противоположных сторонах задней части основного корпуса, и самоориентирующийся поворотный колесный узел для изменения направления основного корпуса предусмотрен на передней части нижней части основного корпуса. В этом случае, хотя направление основного корпуса неожиданно изменяется пользователем, направление перемещения ходовых колес соответственно не изменяется. В результате основной корпус может принудительно перемещаться в состоянии, в котором ходовые колеса подняты от пола, или основной корпус может опрокидываться.
[9] В случае, в котором узел колес включает в себя только самоориентирующийся поворотный колесный узел, вращаемый во всех направлениях, с другой стороны, основной корпус может трястись даже во время прямолинейного перемещения основного корпуса, в результате чего основной корпус может сталкиваться со стенкой или мебелью в комнате. Кроме того, при очистке ковра основной корпус может не легко перемещаться по ковру вследствие длинных ворсинок ковра.
Решение задачи
[10] В соответствии с одним или более вариантами осуществления, пылесос может включать в себя основной корпус, который может включать в себя вентиляторный двигатель для генерирования всасывающей силы, всасывающий узел, соединенный с основным корпусом, для всасывания инородного материала с поверхности, подлежащей очистке, при контакте с поверхностью, пылесборник, отдельно монтируемый на основной корпус, для возможного отделения и сбора пыли из воздуха, всасываемого всасывающим узлом, и узел колес для перемещения основного корпуса, причем узел колес может включать в себя рамы, предусмотренные на нижней части и левой и правой сторонах основного корпуса, и колеса, смонтированные с возможностью вращения на рамах, предусмотренных на левой и правой сторонах основного корпуса, при этом каждое колесо возможно имеет отрицательный угол развала колес.
[11] Каждое колесо может сходиться таким образом, что передняя часть каждого колеса направляется внутрь основного корпуса, а задняя часть каждого колеса направляется наружу.
[12] Центр тяжести основного корпуса может располагаться позади центра вращения каждого колеса.
[13] Основной корпус может быть предусмотрен на его нижней части с самоориентирующимся поворотным колесным узлом, вращаемым во всех направлениях.
[14] Самоориентирующийся поворотный колесный узел может включать в себя ось рулевого управления, смонтированную на нижней части основного корпуса, раму самоориентирующегося поворотного колесного узла, вращаемую вокруг оси рулевого управления во всех направлениях, ось вращения, смонтированную на раме самоориентирующегося поворотного колесного узла, и колесо самоориентирующегося поворотного колесного узла, вращаемое вокруг оси вращения для перемещения по полу.
[15] Ось вращения может быть удалена от прямой линии, проходящей от оси рулевого управления, на заданное расстояние.
[16] Основной корпус может быть поворачиваемым независимо от узла колес таким образом, что основной корпус поворачивается для изменения его направления перемещения, и основной корпус перемещается в измененном направлении посредством узла колес.
[17] Рама, предусмотренная на нижней части основного корпуса, может быть предусмотрена с кольцеобразной первой направляющей вращения в выступающем состоянии.
[18] Основной корпус может быть предусмотрен на его нижней части с размещающим узлом для возможного размещения первой направляющей вращения.
[19] Размещающий узел может быть предусмотрен на его внутренней части со второй направляющей вращения в выступающем состоянии, при этом вторая направляющая вращения возможно функционирует в качестве оси вращения основного корпуса.
[20] Рама, предусмотренная на нижней части основного корпуса, может быть предусмотрена с канавкой для размещения направляющей, в которую может вставляться вторая направляющая вращения.
[21] Канавка для размещения направляющей может быть образована на первой направляющей вращения, и вторая направляющая вращения может вставляться с возможностью вращения в канавку для размещения направляющей.
[22] Рама, предусмотренная на нижней части основного корпуса, может быть предусмотрена с упругим элементом.
[23] Основной корпус может быть предусмотрен на его нижней части с прижимным узлом для прижатия упругого элемента.
[24] Прижимной узел может прижимать упругий элемент, когда основной корпус поворачивается для возможного изменения его направления перемещения.
[25] Узел колес может поворачиваться в направлении, в котором основной корпус направляется под действием силы упругости упругого элемента.
[26] Рама, предусмотренная на нижней части основного корпуса, может быть предусмотрена с монтажным узлом для упругого элемента для размещения упругого элемента.
[27] Монтажный узел для упругого элемента может быть предусмотрен на его стороне с отверстием, через которое прижимной узел может прижимать упругий элемент.
[28] Прижимной узел может быть предусмотрен в размещающем узле, который может быть образован на нижней части основного корпуса.
[29] Внутренняя часть размещающего узла может сталкиваться с монтажным узлом для упругого элемента или стопором, который может быть предусмотрен на раме, которая может быть предусмотрена на нижней части основного корпуса, для возможного ограничения угла вращения основного корпуса.
[30] В соответствии с одним или более вариантами осуществления пылесос может включать в себя основной корпус, который может включать в себя вентиляторный двигатель для генерирования всасывающей силы, и узел колес, на который основной корпус может монтироваться с возможностью вращения, для перемещения основного корпуса, причем узел колес может включать в себя рамы, предусмотренные на нижней части и левой и правой сторонах основного корпуса, и колеса, смонтированные с возможностью вращения на рамах, которые могут быть предусмотрены на левой и правой сторонах основного корпуса, при этом каждое колесо возможно имеет отрицательный угол развала колес.
[31] Основной корпус может быть поворачиваем независимо от узла колес таким образом, что основной корпус может поворачиваться для изменения его направления перемещения, и основной корпус может перемещаться в измененном направлении посредством узла колес.
[32] Каждое колесо может сходиться таким образом, что передняя часть каждого колеса может направляться внутрь основного корпуса, а задняя часть каждого колеса может направляться наружу.
[33] Центр тяжести основного корпуса может располагаться позади центра вращения каждого колеса.
Полезные преимущества изобретения
[34] Пылесос в соответствии с вариантами осуществления настоящего изобретения может быть выполнен таким образом, что основной корпус может первым поворачиваться независимо от узла колес во время изменения направления движения пылесоса, и затем узел колес может поворачиваться в направлении, в котором направлен основной корпус, для изменения направления перемещения основного корпуса, и центр тяжести пылесоса может располагаться на задней части каждого колеса для возможного улучшения прямолинейной подвижности основного корпуса благодаря узлу колес.
Краткое описание чертежей
[35] Эти и/или другие аспекты станут очевидными и более легко понятными из нижеследующего описания вариантов осуществления, приведенных совместно с сопровождающими чертежами, на которых:
[36] фиг.1 представляет собой вид, показывающий пылесос в соответствии с одним или более вариантами осуществления;
[37] фиг.2 представляет собой вид, показывающий состояние, в котором пылесборник отделен от основного корпуса в соответствии с одним или более вариантами осуществления;
[38] фиг.3 представляет собой вид, показывающий состояние, в котором узел колес отделен от основного корпуса в соответствии с одним или более вариантами осуществления;
[39] фиг.4 представляет собой вид, показывающий узел колес в соответствии с одним или более вариантами осуществления;
[40] фиг.5 представляет собой вид, показывающий нижнюю часть основного корпуса в соответствии с одним или более вариантами осуществления;
[41] фиг.6A-6C представляют собой виды, показывающие основной корпус в соответствии с одним или более вариантами осуществления до и после поворота, если смотреть снизу;
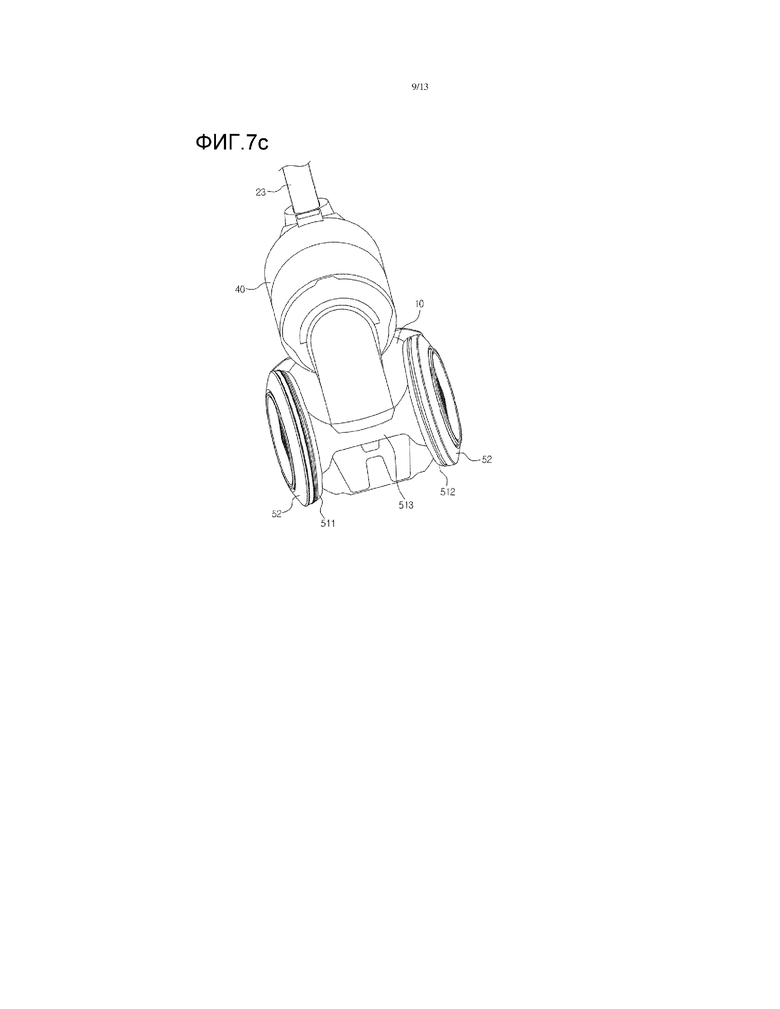
[42] фиг.7A-7C представляют собой виды, показывающие основной корпус в соответствии с одним или более вариантами осуществления до и после поворота, если смотреть сверху;
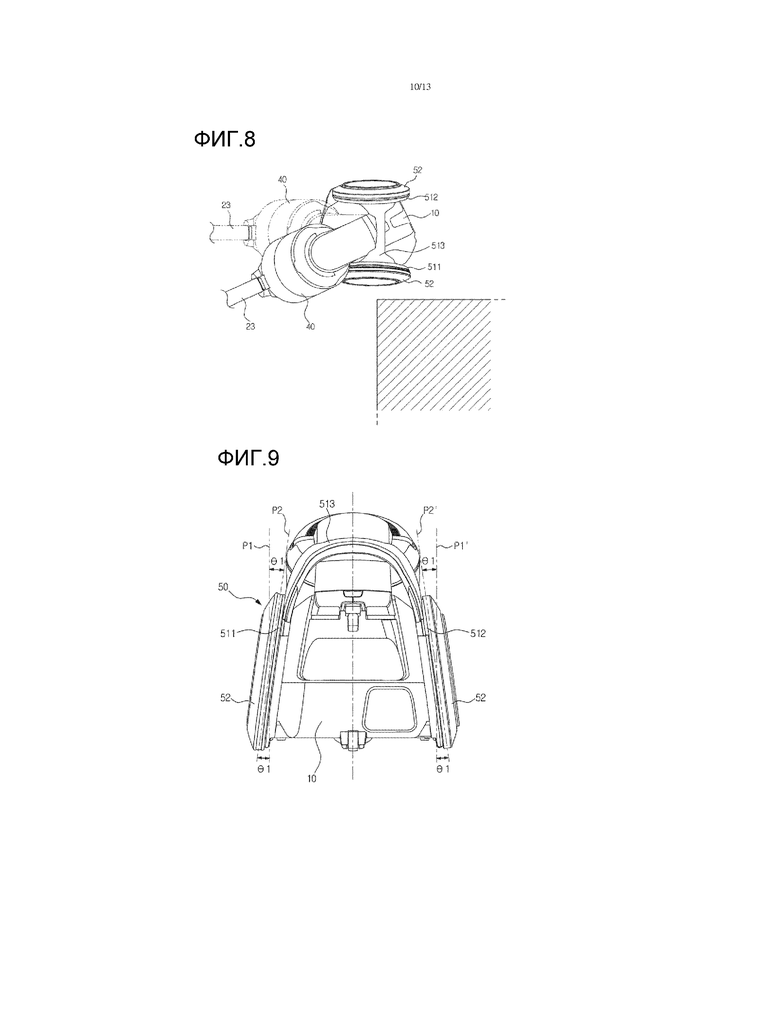
[43] фиг.8 представляет собой вид, показывающий, что основной корпус в соответствии с одним или более вариантами осуществления поворачивается вокруг угла и перемещается;
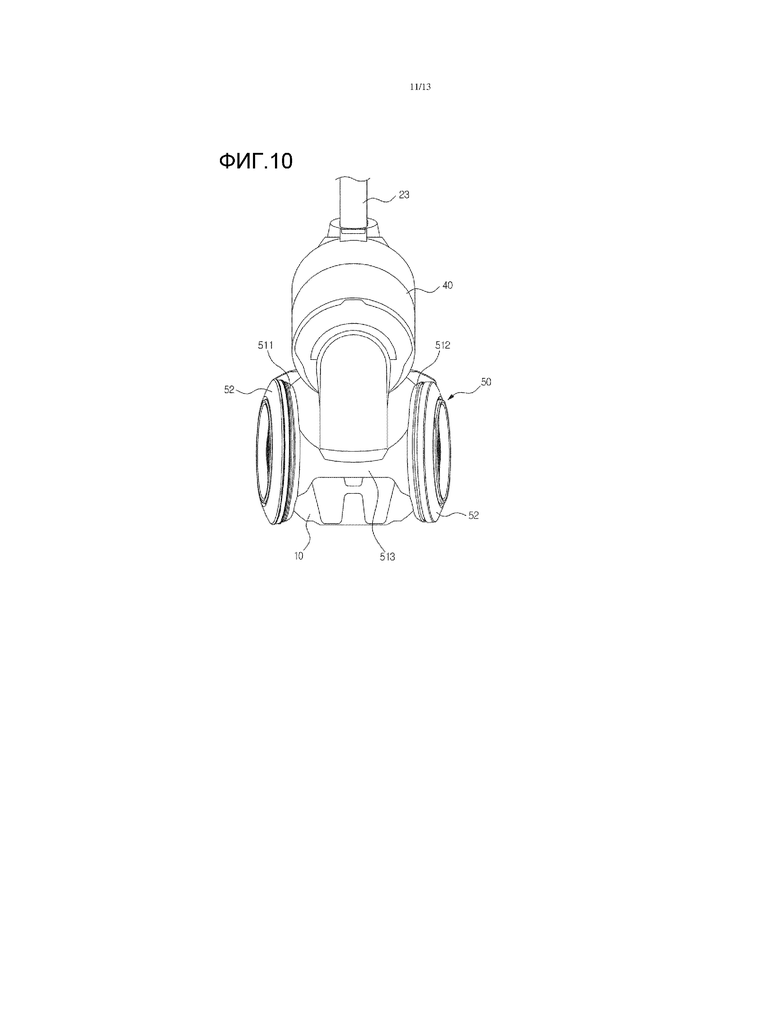
[44] фиг.9 и 10 представляют собой виды, показывающие схему развала колес узла колес в соответствии с одним или более вариантами осуществления;
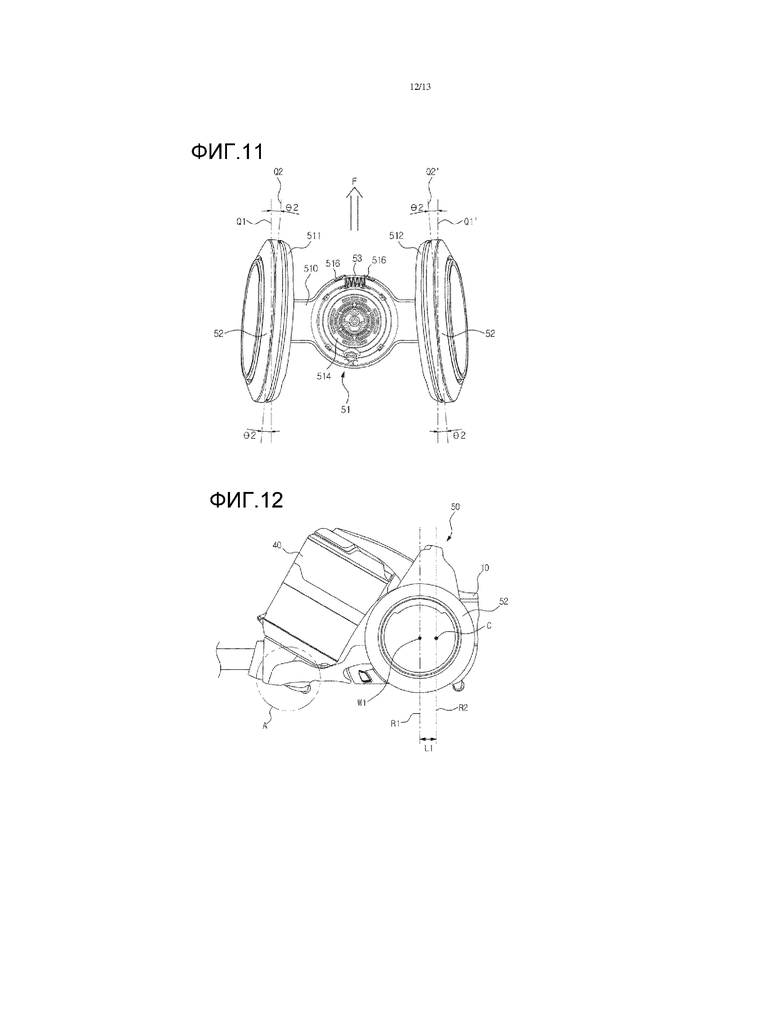
[45] фиг.11 представляет собой вид, показывающий схему схождения колес узла колес в соответствии с одним или более вариантами осуществления;
[46] фиг.12 представляет собой вид, показывающий центр тяжести основного корпуса и центр вращения колеса в соответствии с одним или более вариантами осуществления; и
[47] фиг.13 представляет собой вид, показывающий конструкцию самоориентирующегося поворотного колесного узла в соответствии с одним или более вариантами осуществления.
Предпочтительный вариант осуществления изобретения
[48] Ссылка теперь будет делаться подробно на один или более вариантов осуществления, показанных на прилагаемых чертежах, на которых одинаковые ссылочные позиции ссылаются на одинаковые элементы на всех чертежах. В этом отношении варианты осуществления настоящего изобретения могут воплощаться во множестве разных форм и не должны рассматриваться как ограниченные на вариантах осуществления, приведенных здесь, так как средним специалистам в данной области будет понятно, после того как они поймут варианты осуществления, рассмотренные здесь, что различные изменения, модификации и эквиваленты систем, устройств и/или способов, описанных здесь, включены в изобретение. Соответственно варианты осуществления просто описаны ниже посредством ссылки на фигуры для объяснения аспектов настоящего изобретения.
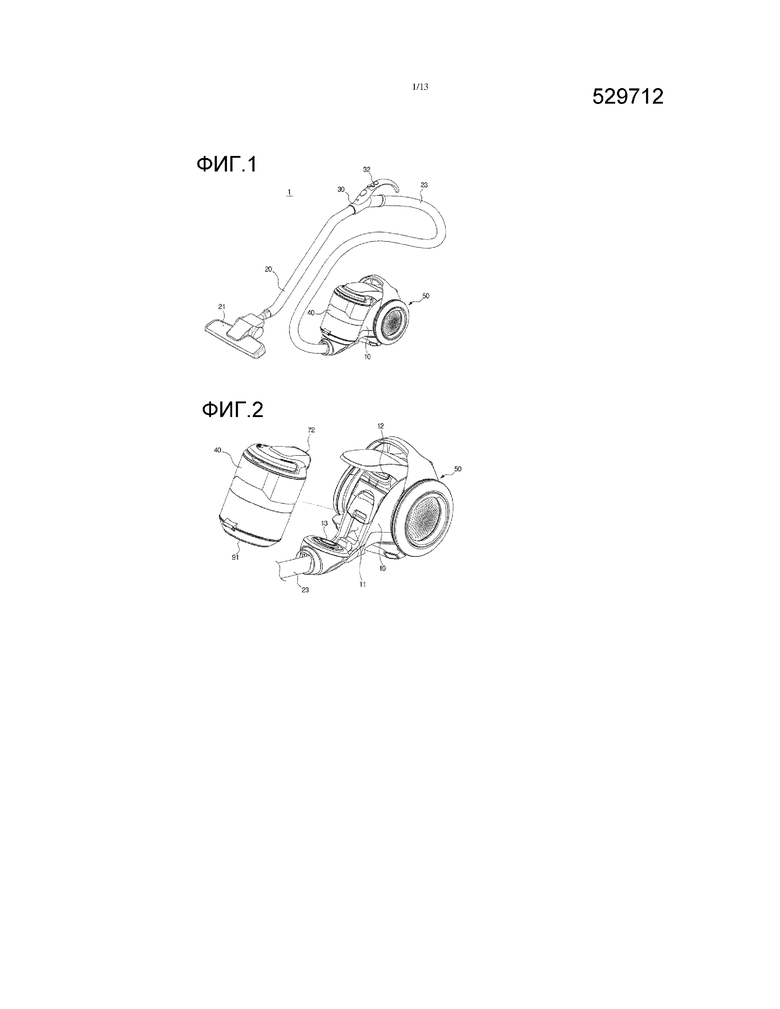
[49] Фиг.1 представляет собой вид, показывающий пылесос в соответствии с одним или более вариантами осуществления, и фиг.2 представляет собой вид, показывающий состояние, в котором пылесборник отделен от основного корпуса в соответствии с одним или более вариантами осуществления.
[50] Ссылаясь на фиг.1 и 2, пылесос 1 в соответствии с одним или более вариантами осуществления может включать в себя основной корпус 10, пылесборник 40, всасывающий узел 21 и узел 50 колес. Пылесборник 40 и узел 50 колес могут монтироваться на основной корпус 10. Всасывающий узел 21 может контактировать с поверхностью, подлежащей очистке, для всасывания инородного материала с поверхности. Пылесос 1 в соответствии с одним или более вариантами осуществления может представлять собой пылесос канистрового типа.
[51] Основной корпус 10 может включать в себя вентиляторный двигатель (не показан) для генерирования всасывающей силы. Всасывающий узел 21 может всасывать воздух с поверхности, включая пыль, содержащуюся в воздухе, используя всасывающую силу, генерируемую основным корпусом 10. Всасывающий узел 21 может быть выполнен с широкой формой таким образом, что всасывающий узел 21 может плотно контактировать с поверхностью.
[52] Между основным корпусом 10 и всасывающим узлом 21 могут быть предусмотрены удлинительная трубка 20, рукояточная трубка 30 и гибкий шланг 23. Удлинительная трубка 20 может быть выполнена, например, из полимерного или металлического материала, но не ограничена на этом. Удлинительная трубка 20 может соединяться между всасывающим узлом 21 и рукояточной трубкой 30.
[53] Рукояточная трубка 30 может соединяться между удлинительной трубкой 20 и гибким шлангом 23. Рукоятка 31 и манипулятор 32 могут быть предусмотрены на рукояточной трубке 30. Пользователь может выполнять очистку при удерживании рукоятки 31. Кроме того, пользователь может манипулировать кнопками манипулятора 32 для включения/выключения пылесоса или регулирования степени всасывания.
[54] Гибкий шланг 23 может соединяться между рукояточной трубкой 30 и основным корпусом 10. Гибкий шланг 23 может быть выполнен из гибкого материала, таким образом рукояточная трубка 30 может свободно перемещаться.
[55] Всасывающий узел 21, удлинительная трубка 20, рукояточная трубка 30 и гибкий шланг 23 могут сообщаться друг с другом. Воздух, всасываемый из всасывающего узла 21, может подаваться в основной корпус 10 через удлинительную трубку 20, рукояточную трубку 30 и гибкий шланг 23.
[56] Основной корпус 10 может быть предусмотрен с всасывающим портом 13 для направления всасываемого воздуха в пылесборник 40 и выпускным портом 12 для выпуска воздуха, очищенного пылесборником 40. Выпускной порт 12 может сообщаться с отделением вентиляторного двигателя (не показано), в котором может монтироваться вентиляторный двигатель (не показан).
[57] Основной корпус 10 может быть предусмотрен с монтажным узлом 11, на который может монтироваться пылесборник 40. Пылесборник 40 может отдельно монтироваться на монтажный узел 11. Пылесборник 40 может отделять пыль от воздуха, всасываемого через всасывающий узел 21, и может выпускать очищенный воздух через выпускной порт 12.
[58] Пылесборник 40 может включать в себя впуск 91, через который воздух, содержащий пыль, может подаваться, и выпуск 72, через который очищенный воздух может выпускаться. Когда пылесборник 40 смонтирован на основной корпус 10, впуск 91 может сообщаться с всасывающим портом 13 основного корпуса 10, и выпуск 72 может сообщаться с выпускным портом 12 основного корпуса 10.
[59] Пылесборник 40 может отделять пыль от воздуха, используя центробежную силу, генерируемую вихревым воздушным потоком. Когда пыль накапливается в пылесборнике до некоторой степени, пользователь может отделять пылесборник 40 от основного корпуса 10 и удалять пыль из пылесборника 40.
[60] Основной корпус 10 может монтироваться на узел 50 колес. Основной корпус 10 может перемещаться по полу посредством узла 50 колес. Узел 50 колес может включать в себя раму 51 и колеса 52. Рама 51 может соединяться с основным корпусом 10, и колеса 52 могут монтироваться на раму 51. Колеса 52 могут располагаться на противоположных сторонах основного корпуса 10.
[61] Основной корпус 10 может быть предусмотрен на его нижней части с самоориентирующимся поворотным колесным узлом 60 и вспомогательным колесом 70. Самоориентирующийся поворотный колесный узел 60 может располагаться на передней части основного корпуса 10 таким образом, что самоориентирующийся поворотный колесный узел 60 вращается во всех направлениях для плавного поворачивания основного корпуса 10. Основной корпус 10 может поддерживаться на полу в трех точках посредством самоориентирующегося поворотного колесного узла 60 и колес 52, которые могут быть предусмотрены на левой и правой сторонах основного корпуса 10. Самоориентирующийся поворотный колесный узел 60 может располагаться на передней части нижней части основного корпуса 10, на которой гибкий шланг 23 может соединяться с основным корпусом 10. Когда направление гибкого шланга 23 изменяется посредством манипулирования пользователем, передняя часть основного корпуса 10 может поворачиваться в направлении, в котором направлен гибкий шланг 23.
[62] Вспомогательное колесо 70 может быть предусмотрено на задней части нижней части основного корпуса 10 таким образом, что вспомогательное колесо 70 может вращаться вокруг оси вращения (не показана). Вспомогательное колесо 70 может способствовать перемещению основного корпуса 10 посредством узла 50 колес.
[63] В дальнейшем конструкции основного корпуса и узла колес в соответствии с одним или более вариантами осуществления будут подробно описываться со ссылкой на прилагаемые чертежи.
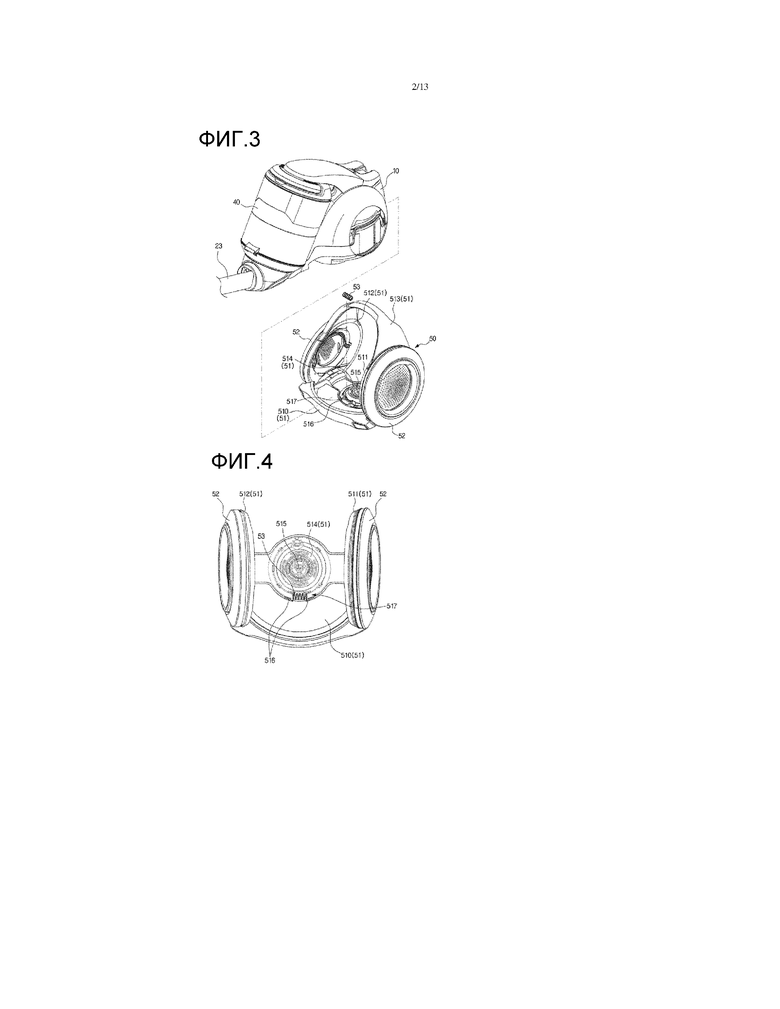
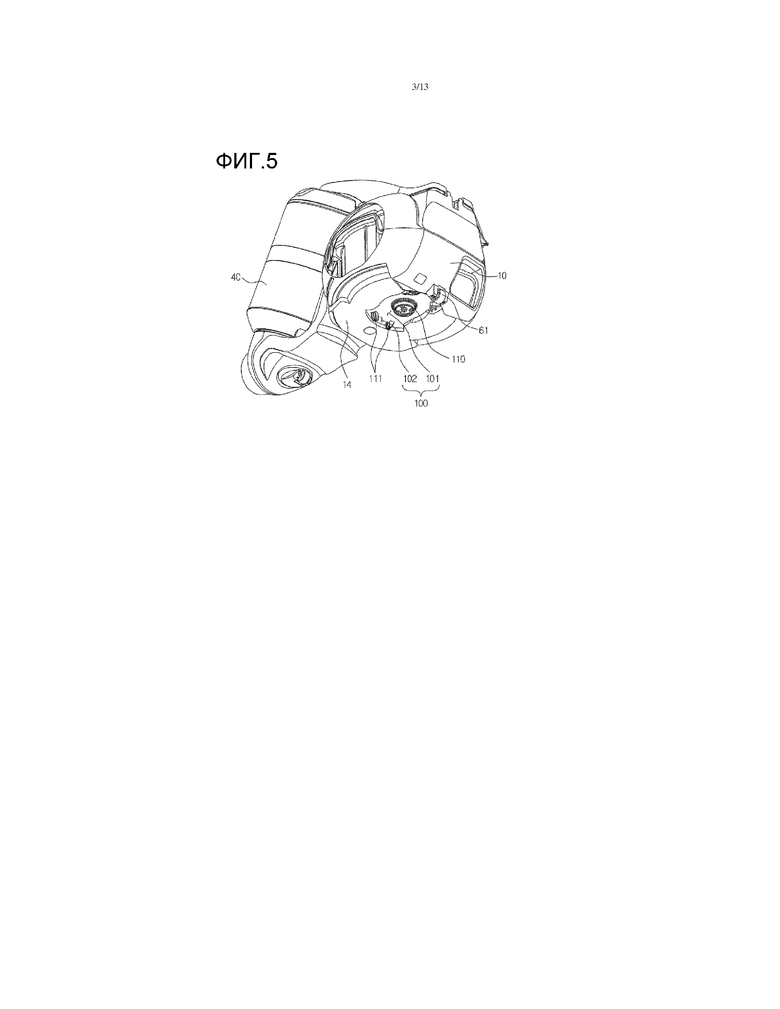
[64] Фиг.3 представляет собой вид, показывающий состояние, в котором узел колес отделен от основного корпуса в соответствии с одним или более вариантами осуществления, фиг.4 представляет собой вид, показывающий узел колес в соответствии с одним или более вариантами осуществления, и фиг.5 представляет собой вид, показывающий нижнюю часть основного корпуса в соответствии с одним или более вариантами осуществления.
[65] Ссылаясь на фиг.3-5, основной корпус 10 в соответствии с одним или более вариантами осуществления может монтироваться с возможностью вращения на узел 50 колес. Основной корпус 10 может перемещаться посредством узла 50 колес. Когда направление гибкого шланга 23 изменяется посредством манипулирования пользователем во время очистки, основной корпус 10 может поворачиваться в измененном направлении гибкого шланга 23 независимо от узла 50 колес.
[66] Узел 50 колес может включать в себя раму 51 и колеса 52, смонтированные с возможностью вращения на раме 51. Колеса 52 могут быть предусмотрены на левой и правой сторонах основного корпуса 10 в направлении перемещения основного корпуса 10. Колеса 52 могут перемещать основной корпус 10 в направлении перемещения гибкого шланга 23, соединенного с основным корпусом 10.
[67] Рама 51 может включать в себя первую раму 511 и вторую раму 512, на которые колеса 52, предусмотренные на левой и правой сторонах основного корпуса 10, могут монтироваться, и третью раму 510, которая может соединяться между первой рамой 511 и второй рамой 512. Третья рама 510 может располагаться на нижней части основания 14, которое может быть предусмотрено на нижней части основного корпуса 10. Рама 51 может дополнительно включать в себя четвертую раму 513, расположенную на верхней части основного корпуса 10. Четвертая рама 513 может соединяться между первой рамой 511 и второй рамой 512.
[68] Основной корпус 10 может поворачиваться относительно рамы 51. Основание 14 основного корпуса 10 и третья рама 510 могут соединяться друг с другом с возможностью вращения через посредство крепежного элемента.
[69] Первая направляющая 514 вращения для направления вращения основного корпуса 10 может быть образована на третьей раме 510 в выступающем состоянии. Первая направляющая 514 вращения может быть выполнена с кольцевой формой. Первая направляющая 514 вращения может вставляться в размещающий узел 100, который будет описываться в дальнейшем, образованный на основании.
[70] Первая направляющая 514 вращения может быть предусмотрена с канавкой 515 для размещения направляющей. Вторая направляющая 514 вращения, которая будет описываться в дальнейшем, образованная на основании 14, может вставляться в канавку 515 для размещения направляющей.
[71] Упругий элемент 53 может быть предусмотрен на одной стороне третьей рамы 510. Третья рама 510 может быть предусмотрена с монтажным узлом 516 для упругого элемента. Упругий элемент 53 может размещаться в монтажный узел 516 для упругого элемента. Монтажный узел 516 для упругого элемента может выступать от третьей рамы 510. Монтажный узел 516 для упругого элемента может располагаться снаружи первой направляющей 514 вращения.
[72] Третья рама 510 может быть предусмотрена со стопором. Монтажный узел 516 для упругого элемента, выступающий от третьей рамы 510, может функционировать в качестве стопора. В качестве альтернативы стопор может быть образован на третьей раме 510 отдельно от монтажного узла 516 для упругого элемента в выступающем состоянии. Стопор может быть предусмотрен на другой стороне третьей рамы 510 отдельно от монтажного узла 516 для упругого элемента.
[73] В этом случае стопор может быть предусмотрен напротив монтажного узла 516 для упругого элемента относительно центра вращения первой направляющей 514 вращения. Расстояние от центра вращения первой направляющей 514 вращения до монтажного узла 516 для упругого элемента может быть равным расстоянию от первой направляющей 514 вращения до стопора.
[74] Отверстия 517 могут быть образованы на противоположных сторонах монтажного узла 516 для упругого элемента. Прижимные узлы 111, которые будут описываться в дальнейшем, могут быть образованы на основании 14. Прижимные узлы 111 могут прижимать упругий элемент 53, размещенный в монтажном узле 516 для упругого элемента, через отверстия 517.
[75] Размещающий узел 100 может быть образован на основании 14, обеспеченном на нижней части основного корпуса 10. Первая направляющая 514 вращения третьей рамы 510 может размещаться с возможностью вращения в размещающем узле 100. Монтажный узел 516 для упругого элемента может размещаться в размещающем узле 100.
[76] Размещающий узел 100 может включать в себя первый размещающий узел 101 и второй размещающий узел 102. Первый размещающий узел 101 может быть образован в форме окружности R1, соответствующей наружному диаметру первой направляющей 514 вращения. Второй размещающий узел 102 может располагаться снаружи первого размещающего узла 101. Конкретно второй размещающий узел 102 может располагаться спереди или сзади первого размещающего узла 101 таким образом, что второй размещающий узел 102 может соединяться с первым размещающим узлом 101. Размещающий узел 100 может проходить назад и вперед относительно направления перемещения основного корпуса 10.
[77] Второй размещающий узел 102 может быть образован в форме участка окружности R2, соответствующей траектории перемещения внешней части монтажного узла 516 для упругого элемента или внешней части стопора во время вращения основания 14. То есть внутренняя часть размещающего узла 100, образующего второй размещающий узел 102, может быть предусмотрена так, чтобы соответствовать участку окружности R2, соответствующей траектории перемещения внешней части монтажного узла 516 для упругого элемента или внешней части стопора во время вращения основания 14, т.е. дуге сектора, имеющего центральный угол θ1. Форма второго размещающего узла, который может быть образован на прижимных узлах 111, может соответствовать форме второго размещающего узла, в который стопор, предусмотренный на третьей раме 510, может вставляться.
[78] Так как второй размещающий узел 102 может быть образован не в форме полной окружности R2, соответствующей траектории перемещения внешней части монтажного узла 516 для упругого элемента или внешней части стопора, а может быть образован в форме участка окружности R2, сторона стопора или монтажного узла 516 для упругого элемента может сталкиваться с внутренней частью размещающего узла 100, образующего второй размещающий узел 102, в результате чего угол вращения основного корпуса может ограничиваться.
[79] Вторая направляющая 110 вращения может быть образована на основании 14, предусмотренном на нижней части основного корпуса 10, в выступающем состоянии. Вторая направляющая 110 вращения может представлять собой ось вращения, вокруг которой основной корпус 10 может вращаться. Когда основной корпус монтируется на узел 50 колес, вторая направляющая 110 вращения может вставляться в канавку 515 для размещения направляющей, образованную на третьей раме 510. Вторая направляющая 110 вращения может вращаться в состоянии, в котором вторая направляющая 110 вращения вставлена в канавку 515 для размещения направляющей.
[80] В дальнейшем будет описываться операция изменения направления перемещения основного корпуса 10 на основе конструкций узла 50 колес и основания 14.
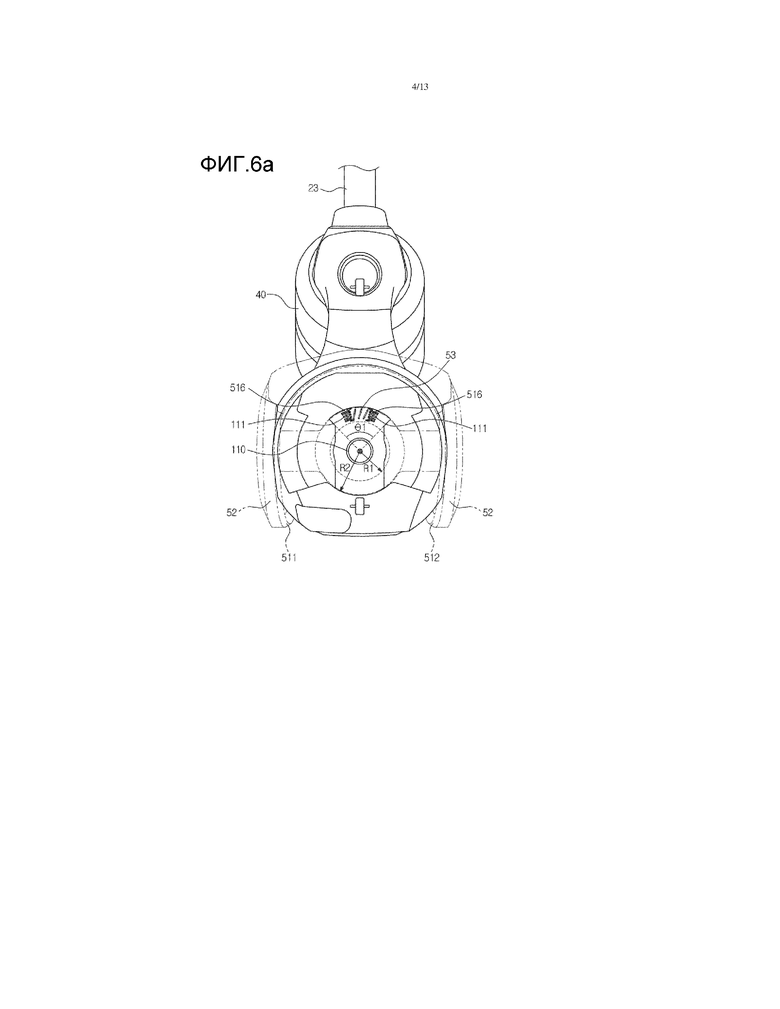
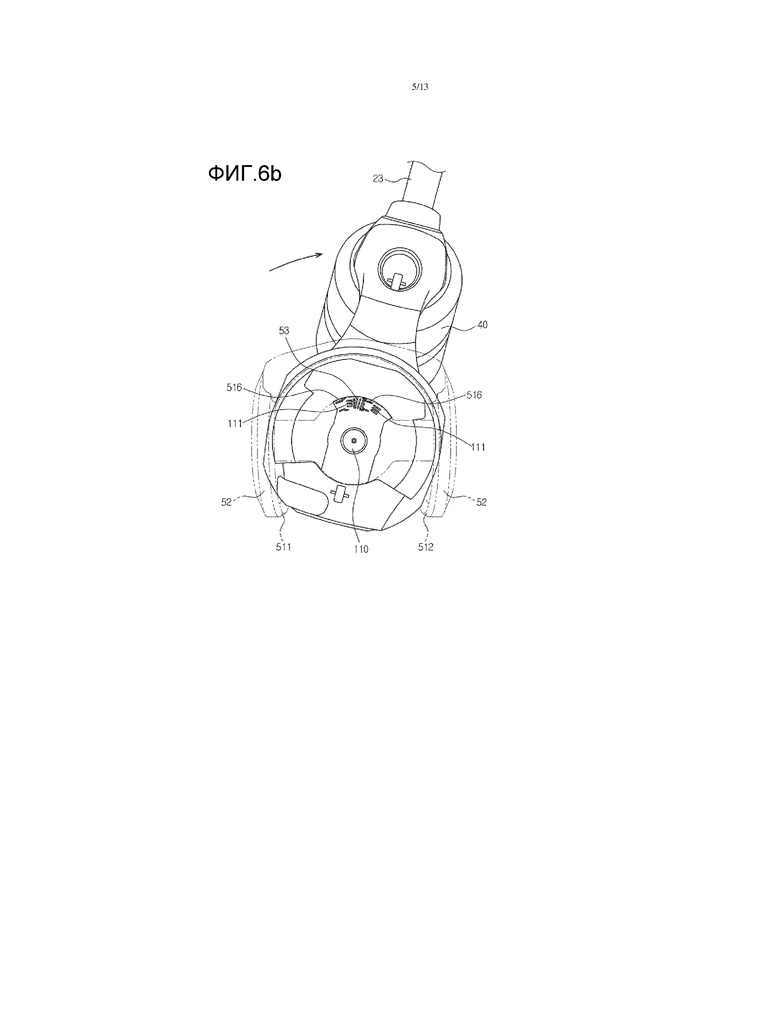
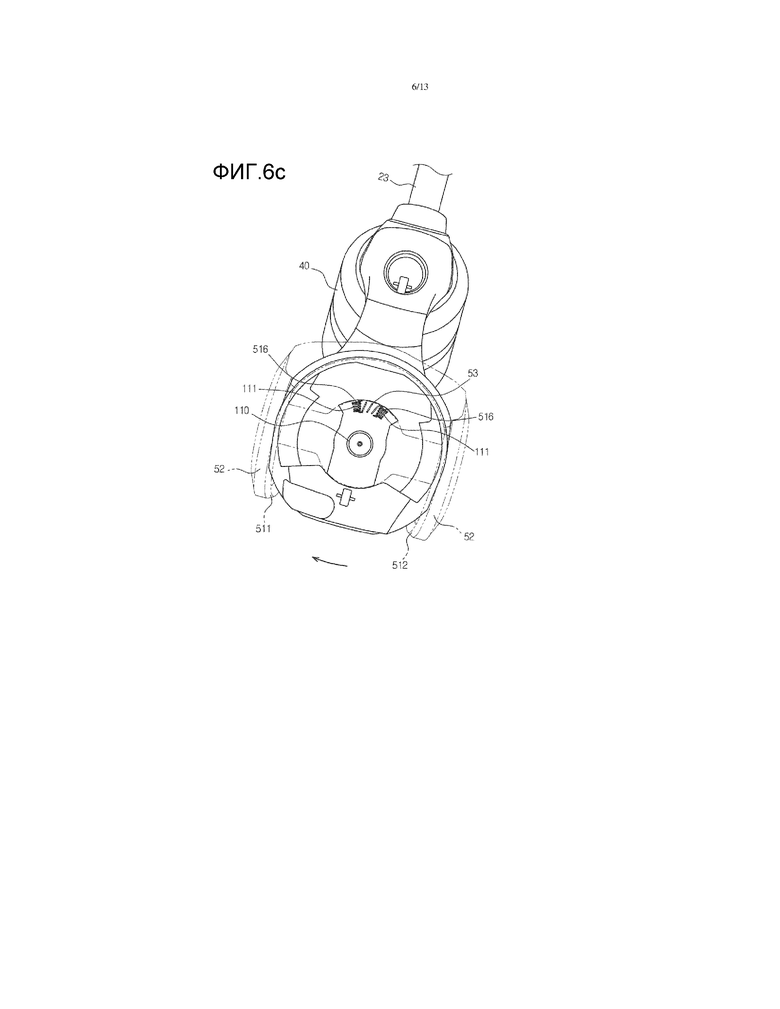
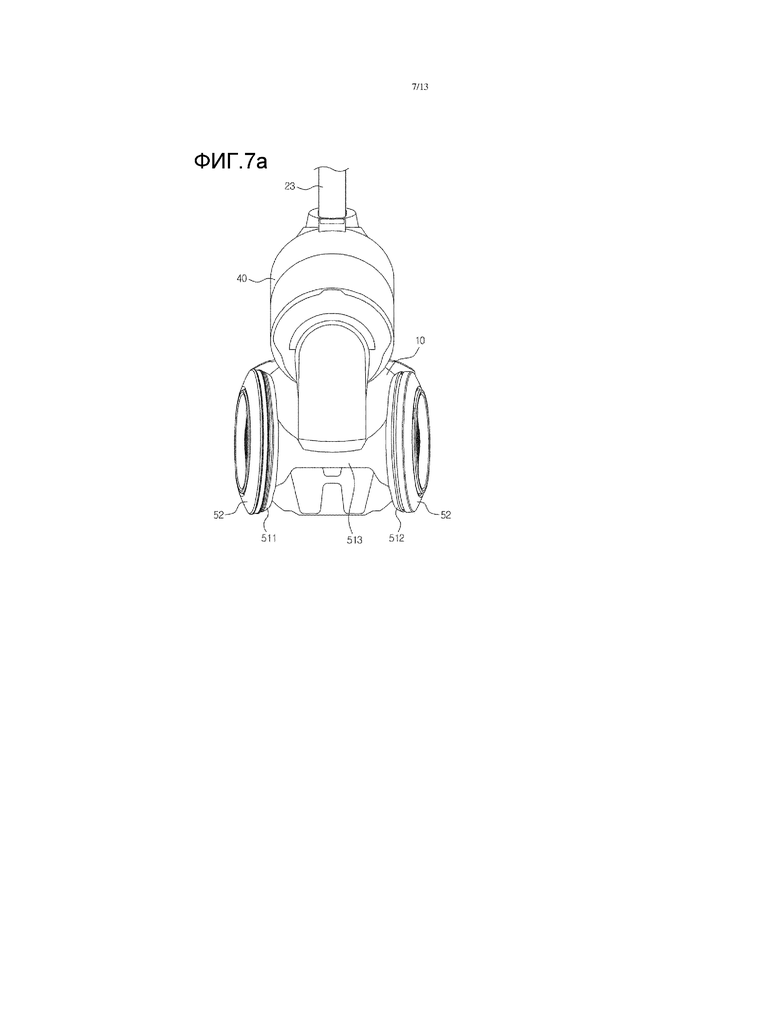
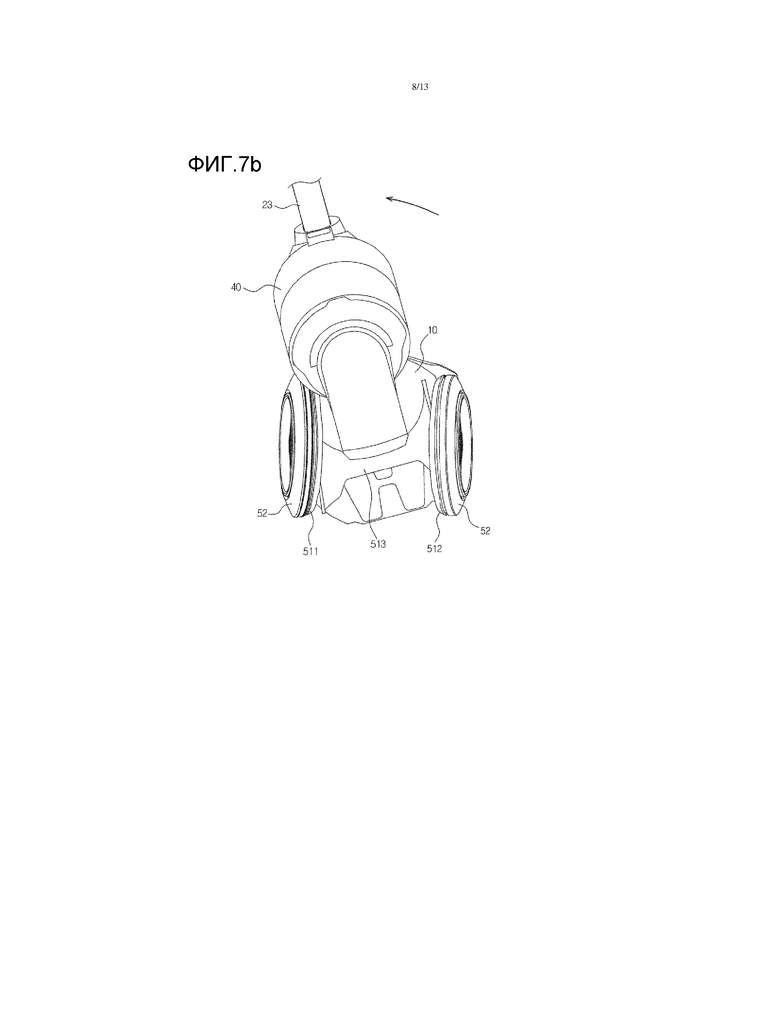
[81] Фиг.6A-6C представляют собой виды, показывающие основной корпус в соответствии с одним или более вариантами осуществления до и после вращения, если смотреть снизу, фиг.7A-7C представляют собой виды, показывающие основной корпус в соответствии с одним или более вариантами осуществления до и после вращения, если смотреть сверху, и фиг.8 представляет собой вид, показывающий, что основной корпус в соответствии с одним или более вариантами осуществления поворачивается вокруг угла и перемещается.
[82] Ссылаясь на фиг.6A-8, когда направление перемещения основного корпуса 10 в соответствии с одним или более вариантами осуществления изменяется посредством гибкого шланга 23 и т.д., основной корпус 10 может первым поворачиваться независимо от узла колес, как показано на фиг.7B. После поворота основного корпуса 10 узел 50 колес может поворачиваться в направлении, в котором направляется основной корпус 10, благодаря упругому элементу 53.
[83] Как показано на фиг.6A и 7A, основной корпус 10 может перемещаться в состоянии, в котором основной корпус 10 располагается по направлению вперед. Как показано на фиг.6A и 7A, узел 50 колес может располагаться в таком же направлении, что и основной корпус 10.
[84] Когда основной корпус 10 поворачивается вокруг угла или направление перемещения основного корпуса 10 изменяется посредством гибкого шланга 23 и т.д., как показано на фиг.8, основной корпус 10 может первым поворачиваться в состоянии, в котором направление узла 50 колес не меняется, как показано на фиг.6B и 7B. При этом прижимные узлы 111, которые могут быть предусмотрены на основании 14 основного корпуса 10, могут прижимать упругий элемент 53, который может размещаться в монтажном узле 516 для упругого элемента, через отверстия 517, которые могут быть образованы на монтажном узле 516 для упругого элемента третьей рамы 510.
[85] Когда сила прикладывается к основному корпусу 10 в измененном направлении перемещения основного корпуса 10 в состоянии, в котором основной корпус 10 повернут, сила упругости упругого элемента 53 может прикладываться к прижимным узлам 111 таким образом, что прижимные узлы 111 могут возвращаться в положения до перемещения. Как показано на фиг.6C и 7C, узел 50 колес может естественно поворачиваться в направлении, в котором направляется основной корпус 10, вследствие силы упругости, которая может прикладываться к прижимным узлам 111. В результате как основной корпус 10, так и узел 50 колес могут поворачиваться и, таким образом, могут изменяться направления перемещения основного корпуса 10 и узла 50 колес. В состоянии, в котором основной корпус 10 и узел 50 колес направлены в одинаковом направлении, следовательно, основной корпус 10 может перемещаться в направлении перемещения после поворота.
[86] Как описано выше, основной корпус 10 может поворачиваться независимо от узла 50 колес и после поворота основного корпуса 10 узел 50 колес может поворачиваться в направлении, в котором направляется основной корпус 10, вследствие силы упругости упругого элемента 53. Следовательно, направление основного корпуса 10 может изменяться. Когда основной корпус 10 поворачивается вокруг угла, как показано на фиг.8, основной корпус 10 может предохраняться от необходимости тянуть его или от опрокидывания, и направление основного корпуса 10 может изменяться. Следовательно, прямолинейное перемещение основного корпуса 10 может достигаться посредством узла 50 колес, при этом способность к поворачиванию основного корпуса 10 может быть улучшена, тем самым, возможно, повышая удобство и удовлетворение пользователя при использовании.
[87] В дальнейшем будет описываться конструкция для улучшения прямолинейной подвижности основного корпуса 10 благодаря узлу колес в соответствии с одним или более вариантами осуществления.
[88] Фиг.9 и 10 представляют собой виды, показывающие конструкцию развала колес узла колес в соответствии с одним или более вариантами осуществления.
[89] Ссылаясь на фиг.9 и 10, узел 50 колес в соответствии с одним или более вариантами осуществления может иметь угол развала колес. Конкретно каждое из колес 52, расположенных на противоположных сторонах основного корпуса 10, может иметь угол развала колес.
[90] Угол развала колес представляет собой угол, образованный между прямой линией P1 или P1’, проходящей перпендикулярно относительно пола, на котором расположен основной корпус 10, и центральной линией P2 или P2’ каждого колеса 52, если на основной корпус 10 смотреть спереди или сзади.
[91] Расстояние между первой рамой 511 и второй рамой 512, расположенными на противоположных сторонах основного корпуса 10, на верхней части основного корпуса 10 может быть больше расстояния на нижней части основного корпуса 10. Если на основной корпус 10 смотреть спереди или сзади, следовательно, первая рама 511 и вторая рама 512, расположенные на нижней части основного корпуса 10, могут быть направлены наружу основного корпуса 10. Верхние части колес 52, смонтированных на первой раме 511 и второй раме 512, могут быть направлены внутрь основного корпуса 10, и нижние части колес 52 могут быть направлены наружу основного корпуса 10.
[92] В случае, в котором верхняя часть каждого колеса 52 направлена внутрь основного корпуса 10, как описано выше, каждое колесо 52 может иметь отрицательный угол развала колес. В случае, в котором верхняя часть каждого колеса 52 направлена наружу основного корпуса 10, с другой стороны, каждое колесо 52 может иметь положительный угол развала колес. Каждое колесо 52 в соответствии с одним или более вариантами осуществления может иметь отрицательный угол развала колес.
[93] Угол развала колес может составлять 10 градусов или меньше. Угол развала колес может изменяться в зависимости от нагрузки.
[94] В случае, в котором каждое колесо 52 имеет отрицательный угол развала колес, расстояние между первой рамой 511 и второй рамой 512 на нижней части основного корпуса 10 больше расстояния на верхней части основного корпуса 10. Следовательно, основной корпус 10 может устойчиво размещаться на полу благодаря колесам 52. Основной корпус 10 может выполнять прямолинейное перемещение в состоянии, в котором основной корпус 10 устойчиво размещен на полу.
[95] Фиг.11 представляет собой вид, показывающий конструкцию схождения колес узла колес в соответствии с одним или более вариантами осуществления.
[96] Ссылаясь на фиг.11, передняя часть узла 50 колес в соответствии с одним или более вариантами осуществления может быть направлена внутрь основного корпуса 10, и задняя часть узла 50 колес может быть направлена наружу основного корпуса 10.
[97] Если на основной корпус 10 смотреть сверху, расстояние между первой рамой 511 и второй рамой 512 узла 50 колес на передней части основного корпуса 10 может быть меньше расстояния на задней части основного корпуса 10. Следовательно, передняя часть каждого из колес 52, предусмотренных на первой раме 511 и второй раме 512, может быть направлена внутрь основного корпуса 10, и задняя часть каждого из колес 52 может быть направлена наружу основного корпуса 10.
[98] Состояние, в котором передняя часть каждого колеса 52 направлена внутрь, а задняя часть каждого колеса 52 направлена наружу, как описано выше, может называться схождением колес. С другой стороны, состояние, в котором передняя часть каждого колеса 52 направлена наружу основного корпуса 10, а задняя часть каждого колеса 52 направлена внутрь основного корпуса 10, может называться расхождением колес.
[99] Каждое колесо 52 в соответствии с одним или более вариантами осуществления может сходиться. Заданный угол θ2 может быть образован между прямой линией Q1 или Q1’, параллельной относительно пола и перпендикулярной относительно третьей рамы 510, и центральной линией Q2 или Q2’ каждого колеса 52.
[100] Когда колеса 52 сходятся, колеса 52 могут стремиться перемещаться вперед основного корпуса 10. В результате прямолинейная подвижность основного корпуса 10 благодаря колесам 52 может быть дополнительно улучшена.
[101] Фиг.12 представляет собой вид, показывающий центр тяжести основного корпуса и центр вращения каждого колеса в соответствии с одним или более вариантами осуществления.
[102] Ссылаясь на фиг.12, центр C тяжести основного корпуса 10 в соответствии с одним или более вариантами осуществления может располагаться позади центра W1 вращения каждого колеса 52. Прямая линия R1, проходящая через центр W1 вращения каждого колеса 52 и перпендикулярно относительно пола, может располагаться до прямой линии R2, проходящей через центр C тяжести основного корпуса 10 и перпендикулярно относительно пола, на заданном расстоянии L1.
[103] Так как центр C тяжести основного корпуса 10 располагается позади центра W1 вращения каждого колеса 52, как описано выше, колеса 52 могут стремиться перемещаться вперед основного корпуса 10 благодаря весу основного корпуса 10. В результате прямолинейная подвижность основного корпуса 10 благодаря колесам 52 может быть улучшена.
[104] Кроме того, колесо 52, смонтированное на первой раме 511, и колесо 52, смонтированное на второй раме 512, могут соединяться с осью вращения (не показана). Ось рулевого управления (не показана) может соединяться с осью вращения (не показана) в состоянии, в котором ось рулевого управления (не показана) является перпендикулярной относительно оси вращения (не показана). Верхняя сторона оси рулевого управления (не показана) может наклоняться назад таким образом, что заданный угол образуется между осью рулевого управления (не показана) и прямой линией, проходящей перпендикулярно относительно пола. Угол, образованный между прямой линией, проходящей через каждое колесо 52 и перпендикулярно относительно пола, и осью рулевого управления (не показана) может называться углом кастера. Обеспечение угла кастера может дополнительно улучшать прямолинейную подвижность основного корпуса 10 благодаря колесам 52.
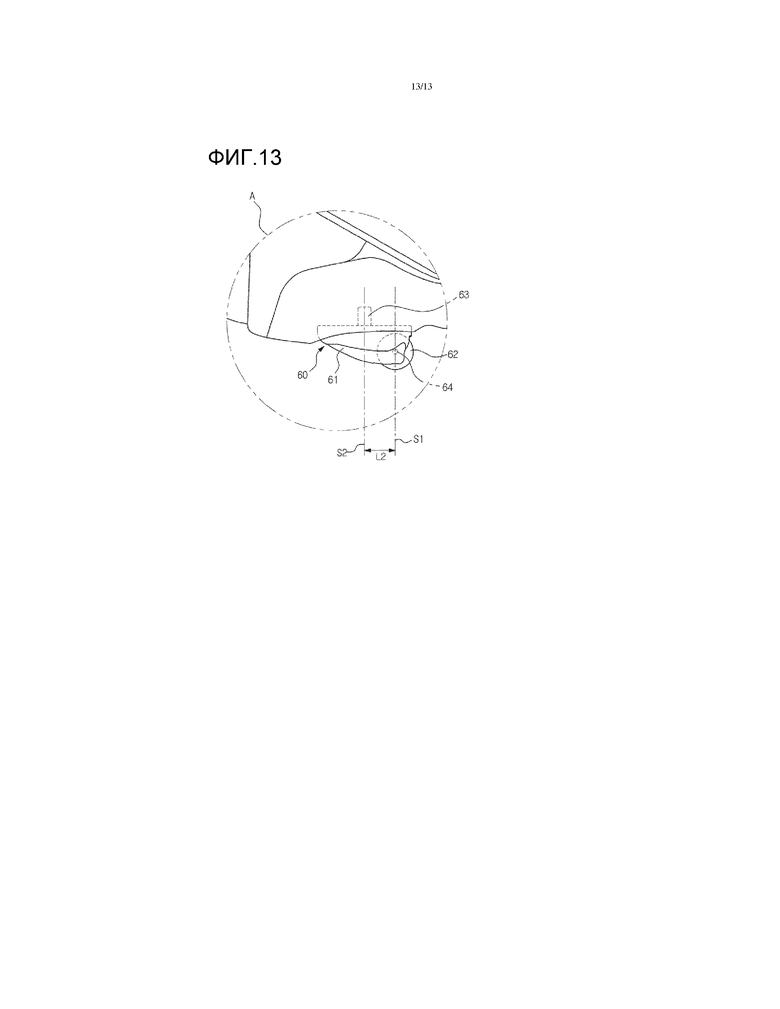
[105] Фиг.13 представляет собой вид, показывающий конструкцию самоориентирующегося поворотного колесного узла в соответствии с одним или более вариантами осуществления.
[106] Ссылаясь на фиг.13, самоориентирующийся поворотный колесный узел 60 в соответствии с одним или более вариантами осуществления может иметь угол кастера. Самоориентирующийся поворотный колесный узел 60 может быть предусмотрен на нижней части основного корпуса 10 таким образом, что самоориентирующийся поворотный колесный узел 60 вращается во всех направлениях для возможного улучшения вращательной подвижности основного корпуса 10.
[107] Самоориентирующийся поворотный колесный узел 60 может включать в себя раму 61 самоориентирующегося поворотного колесного узла, колесо 62 самоориентирующегося поворотного колесного узла, ось 63 рулевого управления и ось 64 вращения. Ось 63 рулевого управления может быть предусмотрена на нижней части основного корпуса 10. Рама 61 самоориентирующегося поворотного колесного узла может монтироваться на нижнюю часть основного корпуса 10 так, чтобы вращаться вокруг оси 63 рулевого управления. Рама 61 самоориентирующегося поворотного колесного узла может вращаться вокруг оси 63 рулевого управления в соответствии с перемещением основного корпуса 10 таким образом, что рама 61 самоориентирующегося поворотного колесного узла может направляться во всех направлениях.
[108] Ось 64 вращения может монтироваться на одну сторону рамы 61 самоориентирующегося поворотного колесного узла. Колесо 62 самоориентирующегося поворотного колесного узла может монтироваться на ось 64 вращения таким образом, что колесо 62 самоориентирующегося поворотного колесного узла может вращаться вокруг оси 64 вращения. Колесо 62 самоориентирующегося поворотного колесного узла может перемещаться по полу. То есть рама 61 самоориентирующегося поворотного колесного узла может вращаться вокруг оси 63 рулевого управления во всех направлениях, и колесо 62 самоориентирующегося поворотного колесного узла может вращаться вокруг оси 64 вращения.
[109] Если на самоориентирующийся поворотный колесный узел 60 смотреть сбоку, прямая линия S1, взаимно соединяющая ось 64 вращения и точку контакта между колесом 62 самоориентирующегося поворотного колесного узла и полом, может быть удалена от прямой линии S2, проходящей от оси 63 рулевого управления, на заданное расстояние L2. Когда прямая линия S1, взаимно соединяющая центр вращения колеса 62 самоориентирующегося поворотного колесного узла и точку контакта между колесом 62 самоориентирующегося поворотного колесного узла и полом, удалена от прямой линии S2, проходящей от оси 63 рулевого управления, на заданное расстояние L2, как описано выше, прямолинейная подвижность самоориентирующегося поворотного колесного узла 60 может быть улучшена.
[110] Когда основной корпус 10 поворачивается независимо от узла 50 колес и колеса 52 перемещаются в направлении вращения основного корпуса 10, как описано выше, может выполняться вращательное перемещение основного корпуса. Кроме того, основной корпус 10 может устойчиво размещаться на полу посредством конструкции схождения колес, и может выполняться прямолинейное перемещение основного корпуса 10. Так как прямолинейное перемещение и вращение основного корпуса 10 легко выполняются, удобство для пользователя может быть повышено во время использования пылесоса.
[111] Как очевидно из вышеприведенного описания, пылесос в соответствии с одним или более вариантами осуществления может выполняться таким образом, что центр тяжести располагается на задней части каждого колеса. Следовательно, может выполняться прямолинейное перемещение пылесоса. Кроме того, основной корпус может первым поворачиваться независимо от колес во время изменения направления пылесоса, и затем колеса могут поворачиваться в направлении, в котором направляется основной корпус. Следовательно, может изменяться направление перемещения пылесоса.
[112] Хотя аспекты настоящего изобретения были конкретно показаны и описаны со ссылкой на их различающиеся варианты осуществления, следует понимать, что эти варианты осуществления должны рассматриваться только в описательном смысле, а не с целью ограничения. Описания признаков или аспектов в каждом варианте осуществления типично должны рассматриваться как доступные для других аналогичных признаков или аспектов в остальных вариантах осуществления. Соответствующие результаты в равной степени могут достигаться, если описанные технологии выполняются в другом порядке и/или если составные элементы в описанной системе, архитектуре, устройстве или схеме объединяются разным образом и/или заменяются или дополняются другими составными элементами или их эквивалентами.
[113] Таким образом, хотя несколько вариантов осуществления были показаны и описаны, причем дополнительные варианты осуществления в равной степени являются доступными, специалистам в данной области будет понятно, что изменения могут выполняться в этих вариантах осуществления, не отступая от принципов и идеи изобретения, объем которого определяется в формуле изобретения и его эквивалентах.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ФИЛЬТРОВАНИЯ ВОДЫ С БЛОКОМ РЕГУЛИРОВКИ УРОВНЯ ВОДЫ | 2010 |
|
RU2515328C2 |
| ПЫЛЕСОС | 2014 |
|
RU2647255C2 |
| ВПУСКНОЕ УСТРОЙСТВО ДЛЯ ПЫЛЕСОСА С МНОЖЕСТВОМ КАНАЛОВ, ПЫЛЕСОС С ТАКИМ УСТРОЙСТВОМ И УЗЕЛ НАСАДКИ ДЛЯ ПЫЛЕСОСА | 2010 |
|
RU2419374C1 |
| МЕХАНИЗМ ЗАКРЕПЛЕНИЯ/ОТДЕЛЕНИЯ ПЫЛЕСБОРНИКА И ЦИКЛОННОЕ ПЫЛЕУЛАВЛИВАЮЩЕЕ УСТРОЙСТВО, СОДЕРЖАЩЕЕ ЭТОТ МЕХАНИЗМ | 2006 |
|
RU2321331C2 |
| ЦИЛИНДРИЧЕСКИЙ ПЫЛЕСОС И СПОСОБ ЕГО СБОРКИ | 2012 |
|
RU2494666C2 |
| ПЫЛЕСОС ВЕРТИКАЛЬНОГО ТИПА, СОДЕРЖАЩИЙ КЛАПАН ПЕРЕКЛЮЧЕНИЯ ВСАСЫВАЮЩИХ ТРАКТОВ | 2008 |
|
RU2463944C2 |
| ВАКУУМНЫЙ ПЫЛЕСОС | 2017 |
|
RU2698851C1 |
| ВСАСЫВАЮЩАЯ НАСАДКА И ПЫЛЕСОС С ТАКОЙ НАСАДКОЙ | 2005 |
|
RU2300303C2 |
| ВАКУУМНЫЙ ПЫЛЕСОС | 2017 |
|
RU2712201C1 |
| ВСАСЫВАЮЩАЯ НАСАДКА И ПЫЛЕСОС С ТАКОЙ НАСАДКОЙ | 2005 |
|
RU2300302C2 |
Предложен пылесос, который включает основной корпус с вентиляторным двигателем, всасывающим узлом, соединенным с основным корпусом, пылесборником, отдельно монтируемым на основном корпусе, и узел колес для перемещения основного корпуса. Узел колес включает рамы на нижней части и левой и правой сторонах основного корпуса. Колеса смонтированы с возможностью вращения на рамах, предусмотренных на левой и правой сторонах основного корпуса, при этом каждое колесо имеет отрицательный угол развала колес. 14 з.п. ф-лы, 13 ил.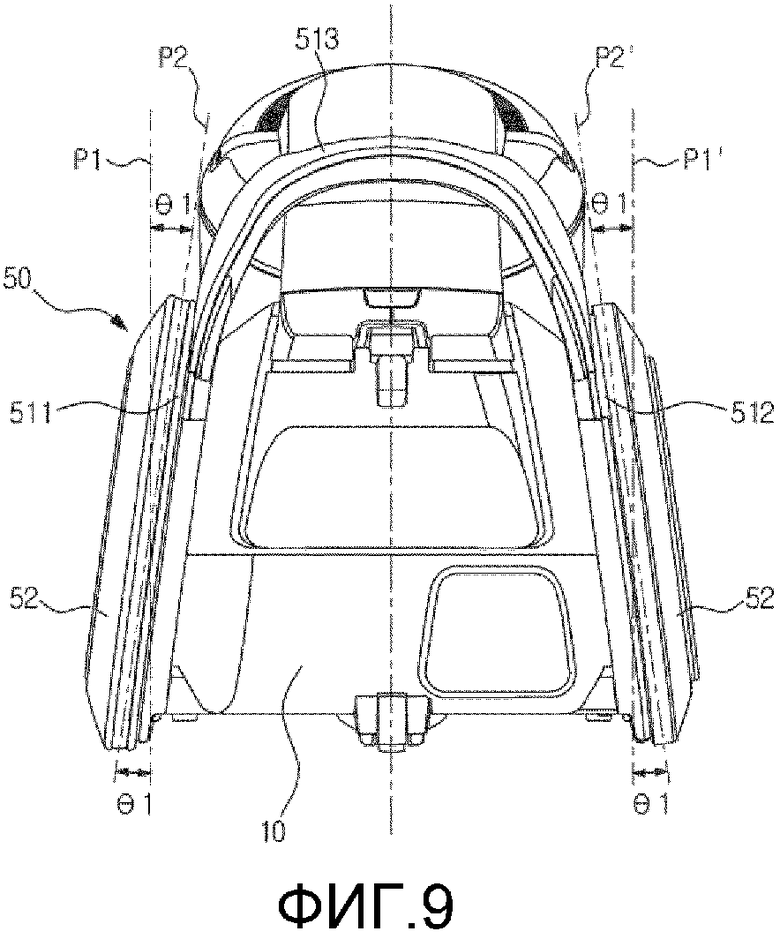
1. Пылесос, содержащий:
основной корпус, содержащий вентиляторный двигатель для генерирования всасывающей силы;
всасывающий узел, соединенный с основным корпусом, для всасывания инородного материала с поверхности, подлежащей очистке, в состоянии контакта с поверхностью;
пылесборник, отдельно монтируемый на основной корпус, для отделения и сбора пыли из воздуха, всасываемого всасывающим узлом; и
узел колес для перемещения основного корпуса, причем узел колес содержит:
нижнюю раму, предусмотренную на нижней части основного корпуса;
левую и правую рамы, предусмотренные на левой и правой сторонах основного корпуса соответственно; и
колеса, смонтированные с возможностью вращения на левой и правой рамах, при этом каждое колесо имеет отрицательный угол развала колес.
2. Пылесос по п.1, в котором каждое колесо сходится таким образом, что передняя часть каждого колеса направлена внутрь основного корпуса, а задняя часть каждого колеса направлена наружу.
3. Пылесос по п.1, в котором центр тяжести основного корпуса располагается позади центра вращения каждого колеса.
4. Пылесос по п.1, в котором основной корпус содержит на его нижней части самоориентирующийся поворотный колесный узел, вращаемый во всех направлениях.
5. Пылесос по п.4, в котором самоориентирующийся поворотный колесный узел содержит:
ось рулевого управления, смонтированную на нижней части основного корпуса;
раму самоориентирующегося поворотного колесного узла, вращаемую вокруг оси рулевого управления во всех направлениях;
ось вращения, смонтированную на раме самоориентирующегося поворотного колесного узла; и
колесо самоориентирующегося поворотного колесного узла, вращаемое вокруг оси вращения.
6. Пылесос по п.5, в котором ось вращения удалена от прямой линии, проходящей от оси рулевого управления, на заданное расстояние.
7. Пылесос по п.1, в котором основной корпус является поворачиваемым независимо от узла колес таким образом, что основной корпус поворачивается для изменения его направления перемещения, и основной корпус перемещается в измененном направлении посредством узла колес.
8. Пылесос по п.7, в котором нижняя рама содержит кольцеобразную первую направляющую вращения в выступающем состоянии.
9. Пылесос по п.8, в котором основной корпус содержит на его нижней части размещающий узел для размещения первой направляющей вращения.
10. Пылесос по п.9, в котором размещающий узел содержит на его внутренней части вторую направляющую вращения в выступающем состоянии, при этом вторая направляющая вращения функционирует в качестве оси вращения основного корпуса.
11. Пылесос по п.10, в котором нижняя рама дополнительно содержит канавку для размещения направляющей для размещения второй направляющей вращения.
12. Пылесос по п.11, в котором канавка для размещения направляющей образована на первой направляющей вращения, и вторая направляющая вращения вставляется с возможностью вращения в канавку для размещения направляющей.
13. Пылесос по п.7, в котором нижняя рама содержит упругий элемент.
14. Пылесос по п.13, в котором основной корпус содержит на его нижней части прижимной узел для прижатия упругого элемента.
15. Пылесос по п.14, в котором прижимной узел прижимает упругий элемент, когда основной корпус поворачивается для изменения направления перемещения основного корпуса.
| US 2005108849 A1 26.05.2005 | |||
| СПОСОБ ТОРЦЕВОЙ СВАРКИ ТОНКИХ МЕТАЛЛИЧЕСКИХ ПЛАСТИН | 2008 |
|
RU2368472C1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |

