Изобретение относится к подъемно-транспортной технике, а именно к устройствам контроля углового положения канатов грузоподъемных машин, и может быть использовано в устройствах для защиты грузоподъемных машин или для гашения колебаний подвешенных грузов.
Известно устройство для контроля угла наклона канатов полиспаста грузоподъемной машины, содержащее измерительный стол, присоединенный к нему наклономер, и ролики, прикрепленные к измерительному столу с возможностью взаимодействия с канатами полиспаста [1], [2].
Недостатками этого устройства является сложность конструкции и недостаточная надежность, обусловленные наличием подвижных (вращающихся) роликов, а также невозможность его применения для измерения угла наклона единичного каната.
Наиболее близким к предложенному является устройство для измерения угла наклона каната, содержащее обойму, через которую пропущен канат, и связанный с ней корпус, в котором установлены маятниковые датчики углового положения, поворотная ось одного из которых перпендикулярна к поворотной оси другого, блок индикации, два пороговых элемента и элементы для подвески корпуса к грузоподъемной машине, причем выходы датчиков углового положения соединены с входами блока индикации и пороговых элементов, имеющих выходы для соединения с приводом грузовой лебедки [3].
Недостатками этого устройства являются отсутствие определения (вычисления) угла наклона каната при его отклонении одновременно в двух плоскостях, повышенная сложность и соответственно пониженная надежность из-за наличия подвижных механических элементов, необходимость проведения технического обслуживания подвижных элементов, а также пониженная точность измерения угла наклона каната, обусловленная наличием сил трения в узлах поворота маятников и отсутствием компенсации влияния скручивания подвески корпуса устройства.
Кроме того, к недостаткам известного устройства относятся его невысокие функциональные возможности, вызванные отсутствием контроля предельного подъема подвижной обоймы или грузозахватного органа, контроля приближения к ЛЭП, измерения усилия в канате и кратности полиспаста.
Техническими задачами, на решение которых направлено заявленное изобретение, являются:
- обеспечение определения (вычисления) результирующей величины угла наклона каната относительно гравитационной вертикали при его отклонении одновременно в двух плоскостях;
- упрощение устройства, повышение его надежности и упрощение технического обслуживания;
- повышение точности измерения угла наклона каната;
- расширение функциональных возможностей устройства за счет реализации контроля предельного подъема подвижной обоймы или грузозахватного органа, приближения к ЛЭП, усилия в канате, кратности полиспаста и контроля приближения к канату какого-либо объекта.
В устройстве для измерения угла наклона каната грузоподъемной машины, содержащем корпус, внутри которого установлены датчики углового положения в двух взаимно перпендикулярных плоскостях, поставленные технические задачи решаются тем, что оно дополнительно содержит электронную схему обработки выходных сигналов датчиков, включающую в себя, по меньшей мере, аналого-цифровой преобразователь, соединенный с микроконтроллером, или микроконтроллер со встроенным аналого-цифровым преобразователем и интерфейсное устройство, соединенное с микроконтроллером и выполненное с возможностью беспроводной передачи выходных данных устройства, а упомянутые датчики выполнены в виде интегральных микромеханических акселерометров с возможностью измерения ускорения гравитационного поля Земли и своими выходами подключены к входам электронной схемы обработки выходных сигналов датчиков, причем корпус посредством подвижного или неподвижного соединения прикреплен к подвижной обойме полиспаста или к грузозахватному органу грузоподъемной машины, причем, в случае подвижного соединения, корпус содержит обойму, прикрепленную к нему или выполненную с корпусом за одно целое, через которую пропущен канат.
Во втором варианте устройства, содержащем корпус, внутри которого установлены датчики углового положения в двух взаимно перпендикулярных плоскостях, и обойму, прикрепленную к корпусу или выполненную с корпусом за одно целое, через которую пропущен канат, и средство для подвески корпуса к грузоподъемной машине, поставленные технические задачи решаются тем, что устройство дополнительно содержит электронную схему обработки выходных сигналов датчиков, а упомянутые датчики выполнены в виде интегральных микромеханических акселерометров с возможностью измерения ускорения гравитационного поля Земли и своими выходами подключены к входам электронной схемы обработки выходных сигналов датчиков. В состав интерфейсного устройства может входить, по меньшей мере, один силовой ключ, выполненный с возможностью управления, по меньшей мере, одним исполнительным устройством грузоподъемной машины.
Средство для подвески или подвижного крепления корпуса к грузоподъемной машине, к подвижной обойме полиспаста или к грузозахватному органу может быть выполнено в виде шарнирного механизма, пружины, каната или цепи.
Для решения поставленных задач в любом варианте устройства каждый из датчиков углового положения или электронная схема обработки их выходных сигналов могут быть выполнены с возможностью тригонометрического преобразования выходных сигналов чувствительных элементов датчиков в величины углов наклона этих датчиков относительно гравитационной вертикали. Электронная схема обработки выходных сигналов датчиков углового положения выполнена, в частности, с возможностью определения угла γ отклонения каната от гравитационной вертикали путем преобразования выходных сигналов α и β датчиков углового положения по формуле γ=(α2+β2)↑1/2 или по формуле γ=(arcsin2α+arcsin2β)↑.
Устройство в любом варианте его исполнения может дополнительно содержать, по меньшей мере, один дополнительный датчик, подключенный к дополнительным входам электронной схемы обработки выходных сигналов датчиков, в частности датчик
- натяжения каната или нагрузки на грузозахватном органе;
- положения подвижной обоймы полиспаста, положения грузозахватного органа или длины средства для подвески;
- приближения к линии электропередачи (электрическую антенну, соединенную с дополнительным входом электронной схемы обработки выходных сигналов датчиков непосредственно или через дополнительное усилительно-фильтрующее устройство);
- приближения к подвижным или к неподвижным препятствиям;
- кратности полиспаста.
При этом для решения поставленных задач датчик длины или приближения, в том числе приближения к препятствиям, выполнен, в частности, бесконтактным емкостным, оптическим, индуктивным или ультразвуковым. В этом случае он содержит излучающий и приемный элементы и генератор, подключенный к излучающему элементу, причем приемный элемент непосредственно или через дополнительное усилительно-преобразовательное устройство соединен с входом электронной схемы обработки выходных сигналов датчиков. Датчик длины средства для подвески может быть выполнен также в виде датчика веса подвесных элементов устройства с возможностью формирования дискретного выходного сигнала при ослаблении натяжения этого средства.
Датчик кратности полиспаста выполнен в виде набора концевых выключателей, взаимодействующих с ветвями каната, или с использованием, по меньшей мере, одного бесконтактного датчика приближения, выполненного с возможностью формирования оптического, или электромагнитного, или ультразвукового излучения, взаимодействующего с канатами полиспаста, причем в последнем случае электронная схема обработки выходных сигналов датчиков выполнена с возможностью определения кратности полиспаста в зависимости от выходных сигналов этого датчика/датчиков.
Датчик натяжения каната может содержать устройство формирования стрелы прогиба каната и тензометрическое устройство, выполненное с возможностью измерения усилия восстановления прямолинейного положения этого каната.
Поставленные технические задачи в любом варианте предложенного устройства могут также решаться тем, что электронная схема обработки выходных сигналов датчиков:
- конструктивно объединена с датчиками (размещена в корпусе устройства);
- содержит аналого-цифровой преобразователь, соединенный с микроконтроллером, или микроконтроллер со встроенным аналого-цифровым преобразователем, и интерфейсное устройство, соединенное с микроконтроллером и выполненное с возможностью проводной или беспроводной передачи выходных данных;
- выполнена с возможностью сравнения выходного сигнала, по меньшей мере, одного датчика с предельно допустимым значением этого сигнала, предварительно записанным в памяти электронной схемы обработки выходных сигналов датчиков, и формирования выходных сигналов устройства или сигналов управления силовым ключом в зависимости от результатов этого сравнения.
Благодаря указанным отличительным признакам, в предложенном устройстве обеспечивается измерение угла наклона каната без использования подвижных механических элементов, что приводит к упрощению устройства, повышению его надежности и упрощению технического обслуживания, а также к повышению точности измерения угла наклона каната за счет исключения влияния сил трения в узлах поворота маятников.
Наличие электронной схемы обработки выходных сигналов датчиков, реализованной на основе микроконтроллера, обеспечивает определение результирующей величины угла наклона каната относительно гравитационной вертикали при его отклонении одновременно в двух плоскостях, а также повышение точности измерений за счет обеспечения независимости результатов этих измерений от скручивания подвески корпуса устройства.
Оснащение устройства дополнительными датчиками, в том числе датчиком предельного подъема подвижной обоймы или грузозахватного органа, датчиком приближения к ЛЭП, датчиком усилия в канате, датчиком кратности полиспаста и датчиком приближения к канату какого-либо объекта, обеспечивает расширение функциональных возможностей.
Поэтому отличительные признаки предложенного изобретения находятся в прямой причинно-следственной связи с достижением указанных технических результатов.
На чертеже в качестве примера приведена одна из возможных функциональных схем устройства для измерения угла наклона каната. В этом примере устройство приспособлено для измерения угла наклона каната грузового полиспаста. Очевидно, что оно может быть использовано для измерения угла наклона каната в стреловом полиспасте, угла наклона одиночного каната и т.д.
Устройство содержит корпус 1, внутри которого установлены датчики углового положения 2 в двух взаимно перпендикулярных плоскостях, электронную схему обработки выходных сигналов датчиков 3, включающую в себя аналого-цифровой преобразователь 4, соединенный с микроконтроллером 5, или микроконтроллер со встроенным аналого-цифровым преобразователем 4, 5, и интерфейсное устройство 6, соединенное с микроконтроллером 5 и обеспечивающее проводную или беспроводную передачу выходных данных устройства. Датчики 2 выполнены в виде интегральных микромеханических акселерометров с возможностью измерения статического ускорения гравитационного поля Земли. Оси чувствительности акселерометров при нулевых отклонениях каната от вертикали имеют заданное положение, например горизонтальное. В случае невозможности такого расположения их осей или наличия погрешности установки этих датчиков, микроконтроллер 5 осуществляет коррекцию выходных сигналов датчиков 2, обеспечивая нулевые значения их выходных сигналов при заданном, в частности вертикальном расположении каната.
Корпус 1 посредством подвижного 7 или неподвижного соединения прикреплен к подвижной обойме полиспаста 8 или к грузозахватному органу грузоподъемной машины. Неподвижное соединение (посредством винтов, сварки и т.п.) применяется в тех случаях, когда угловое положение подвижной обоймы полиспаста или грузозахватного органа однозначно характеризует угловое положение каната. В противном случае применяется подвижное соединение - шарнирный механизм, пружина и т.п. В последнем случае корпус 1 содержит обойму 9, прикрепленную к нему или выполненную с ним за одно целое. Через обойму пропущен канат.
Во втором варианте устройства корпус 1 подвешивается к грузоподъемной машине. Средство для его подвески 10 (на чертеже показано пунктиром) выполнено в виде каната, цепи, пружины или шарнирного механизма.
В варианте устройства с подвешенным корпусом электрическое питание устройства осуществляется от бортовой сети грузоподъемной машины - от ее системы защиты и управления 11, а передача выходных сигналов от интерфейсного устройства 6 может осуществляться при помощи отдельных проводов, по мультиплексному каналу обмена данными (CAN, LIN, RS-485 и т.д.) 12 и/или по радиоканалу (Wi-Fi, Bluetooth, ZigBee, GSM, CDMA и т.д.). В этом варианте в состав интерфейсного устройства 6 могут входить силовые ключи, обеспечивающие управление исполнительными устройствами грузоподъемной машины.
При креплении корпуса 1 к подвижной обойме полиспаста 8 или к грузозахватному органу грузоподъемной машины проводные соединения невозможны. В этом случае для электрического питания устройства предусмотрен автономный источник питания 13, а передача выходных сигналов осуществляется по радиоканалу (Wi-Fi, Bluetooth, ZigBee, GSM, CDMA и т.д.). Соответственно, интерфейсное устройство 6 выполнено в виде передатчика или приемопередатчика (для подтверждения передачи данных) и снабжено антенной 14.
Устройство в любом варианте его исполнения может содержать дополнительные датчики, соединенные с электронной схемой обработки выходных сигналов датчиков 3. К ним относятся, в частности, датчик натяжения каната или нагрузки F на грузозахватном органе 15, датчик положения подвижной обоймы полиспаста 8, положения грузозахватного органа или длины средства для подвески 10, датчик приближения к линии электропередачи (ЛЭП), датчик приближения к подвижным или к неподвижным препятствиям, и/или датчик кратности полиспаста. Эти датчики могут подключаться к дополнительным входам АЦП 4 либо непосредственно, либо через дополнительные усилительно-фильтрующие или усилительно-преобразовательные устройства. При реализации этих датчиков бесконтактными - с использованием оптического, электромагнитного, и/или ультразвукового излучения, электронная схема обработки выходных сигналов датчиков 3 может содержать генератор, выход которого соединяется с излучающими элементами этих дополнительных датчиков (на чертеже условно не показано).
Конструкции таких датчиков общеизвестны. В частности, датчик натяжения каната или нагрузки на грузозахватном органе может быть выполнен в виде тензометрической оси 15, установленной в блоках полиспаста. Возможно также применение датчика натяжения каната, установленного на канате. В этом случае дополнительно используется устройство формирования стрелы прогиба каната, выполненное, например, в виде двух поддерживающих роликов, закрепленных на корпусе 1 или на обойме 9, и отклоняющего ролика, связанного с корпусом 1 (обоймой 9) через тензометрическое устройство, осуществляющее измерение усилия восстановления прямолинейного положения этого каната. Действительное значение силы натяжения каната определяется микроконтроллером 5 с учетом стрелы прогиба (параллелограмма сил).
Датчик приближения к ЛЭП традиционно выполняется в виде электрической антенны, размещенной на внешней поверхности корпуса 1. Антенна непосредственно или через дополнительное усилительно-фильтрующее устройство соединяется с дополнительным входом АЦП 4.
Датчик кратности полиспаста может быть выполнен в виде набора концевых выключателей, расположенных на обойме полиспаста и взаимодействующих с ветвями каната.
Этот датчик, а также датчик положения подвижной обоймы полиспаста 8 или грузозахватного органа, датчик средства для подвески 10 и датчик приближения к подвижным или к неподвижным препятствиям, может быть выполнен бесконтактным - емкостным, оптическим, индуктивным или ультразвуковым. В этом случае дополнительный датчик содержит излучающий и приемный элементы, размещенные на корпусе или в корпусе 1 и генератор, входящий в состав электронной схемы обработки выходных сигналов датчиков 3 и подключенный к излучающему элементу. Приемный элемент этого датчика непосредственно или через дополнительное усилительно-преобразовательное устройство соединен с входом АЦП 4 электронной схемы обработки выходных сигналов датчиков 3.
Принцип действия бесконтактного датчика - датчика приближения/расстояния базируется на взаимодействии сформированного этим датчиком оптического, электромагнитного или ультразвукового излучения с ветвями каната, с обоймой полиспаста, с элементами конструкции грузоподъемной машины и/или с подвижными или неподвижными препятствиями, находящимися вблизи устройства. Это взаимодействие приводит к изменению амплитуды, фазы или времени прихода сигнала на приемном элементе этого датчика. Микроконтроллер 5 осуществляет обработку выходного сигнала приемного элемента этого датчика в соответствии с программой, предварительно записанной в его энергонезависимой памяти, и далее формирует выходные сигналы устройства в зависимости от результатов этой обработки.
В частности, при использовании емкостного принципа измерения излучающий (передающий) и приемный элементы бесконтактного датчика могут быть выполнены в виде металлических электродов, размещенных на корпусе 1 или на обойме 9. При использовании индуктивного принципа измерения излучающий и приемный элементы этого датчика выполнены в виде катушек, оси которых, в частности, совпадают с канатом (катушки надеты на канат).
Если используется ультразвуковой принцип измерения, то излучающий (передающий) и приемный элементы выполняются в виде акустических пьезокерамических преобразователей, например кольцевых.
Датчик длины средства для подвески 10 (датчик предельного подъема грузозахватного органа или подвижной обоймы полиспаста) может быть реализован также в виде датчика веса подвесных элементов устройства с возможностью формирования дискретного выходного сигнала при ослаблении натяжения этого средства.
В любом варианте реализации устройства его функциональные блоки, включая дополнительные датчики, могут быть либо разъединены, либо конструктивно объединены - размещены в общем корпусе 1.
В состав устройства могут также входить дополнительные функциональные узлы, не указанные на приведенной функциональной схеме. К ним, в частности, относятся элементы термокомпенсации, дополнительные передающие и приемные элементы, позволяющие осуществить измерения с повышенной точностью по дифференциальной схеме и т.д. Для документирования работы устройства и соответственно грузоподъемной машины, на которую это устройство установлено, в его состав может быть включен регистратор параметров, реализованный в виде блока энергонезависимой памяти, подключенного к микроконтроллеру 5. Возможно также оснащение устройства элементами индикации, подключенными к дополнительным выходам интерфейсного устройства 6, элементами диагностики его работоспособного состояния и т.д.
Устройство работает следующим образом.
Благодаря креплению корпуса 1 к подвижной обойме полиспаста (к грузозахватному органу) или за счет наличия обоймы 9, охватывающей канат, при работе грузоподъемной машины углы наклона акселерометров - датчиков углового положения 2 в двух взаимно перпендикулярных плоскостях совпадают с углами наклона каната. Соответственно, при отклонении каната от гравитационной вертикали в продольной и поперечной плоскостях Х и Y выходные сигналы датчиков 2:
UX=Sin α, UY=Sin β,
где UX, UY - выходные сигналы датчиков 2 по осям Х и Y;
α и β - углы отклонения (наклона) акселерометров 2.
Значение синуса малых углов с достаточно высокой точностью совпадает со значениями этих углов UX≈α, UY≈β (с точностью до постоянного коэффициента). Поэтому при малых значениях углов α и β результирующий угол у отклонения каната от гравитационной вертикали может быть получен путем преобразования выходных сигналов α и β датчиков углового положения 2 по формуле γ=(α2+β2)↑1/2.
Эти преобразования осуществляются микроконтроллером 5.
При повышенных значениях углов α и β, когда нелинейностью синусоидальной зависимости нельзя пренебречь, микроконтроллер 5 дополнительно осуществляет тригонометрические преобразования и вычисляет результирующий угол отклонения каната по уточненной формуле
γ=(arcsir2α+arcsin2β)↑1/2.
Тригонометрические преобразования могут осуществляться также в датчиках 2. В этом случае их выходные сигналы пропорциональны не проекциям ускорения свободного падения на вертикальную ось, а непосредственно углам их отклонения относительно гравитационной вертикали.
Из геометрических соображений очевидно, что при измерении углов α и β относительно гравитационной вертикали во взаимно перпендикулярных плоскостях и при вычислении значения угла наклона каната γ по приведенным формулам, обеспечивается независимость результата измерения угла наклона каната γ от угла поворота устройства (корпуса 1) относительно оси каната. Соответственно, исключается необходимость защиты подвижного соединения 7 или средства для подвески 10 от скручивания, что упрощает конструкцию устройства и дает возможность определения угла наклона одиночного каната.
При наличии в устройстве какого-либо дополнительного бесконтактного датчика, реализованного с использованием емкостного принципа измерений, его передающий элемент, выполненный в виде электрода, создает в пространстве, окружающем канат, переменное электрическое поле. Благодаря наличию емкости между передающим и приемным элементами этого датчика излучение передающего элемента (электрода) принимается приемным элементом (электродом). Принятый сигнал при необходимости усиливается и преобразуется в цифровую форму при помощи АЦП 4. Его уровень фиксируется и запоминается микроконтроллером 5.
Если вблизи приемного элемента этого датчика отсутствуют другие предметы, если используется однократная запасовка полиспаста (его кратность К=1) и подвижная обойма полиспаста удалена от приемного элемента (электрода) на достаточно большое расстояние, то фиксируемое микроконтроллером 5 выходное напряжение приемного элемента имеет максимальную величину.
При наличии вблизи приемного элемента другой ветви каната полиспаста, т.е. при кратности полиспаста K>1, возникает дополнительная шунтирующая емкость между приемным элементом и этой ветвью каната. Это приводит к образованию делителя напряжения и к уменьшению напряжение на выходе приемного элемента. По мере увеличения количества ветвей каната, т.е. кратности полиспаста, происходит увеличение шунтирующей емкости и соответственно уменьшение выходного напряжения приемного элемента емкостного датчика. Соответственно микроконтроллер 5, сравнивая цифровое значение этой величины с предварительно записанными в его памяти значениями, предварительно определенными расчетным или экспериментальным путем для различных значений кратности полиспаста, определяет эту кратность и передает полученное значение на внешнее устройство через интерфейсное устройство 6.
Аналогичным образом происходит выявление приближения подвижной обоймы полиспаста и каких-либо других предметов к корпусу 1 - к прикрепленным к нему передающим и приемным элементами (электродами). В частности, если расстояние до подвижной обоймы 8 уменьшается до заданной минимально допустимой величины, то устройство формирует сигнал о предельном положении подвижной обоймы полиспаста. В системах безопасности грузоподъемных машин этот сигнал используется, преимущественно, для реализации ограничения предельного подъема грузозахватного органа.
Если в дополнительных датчиках устройства используется индуктивный первичный преобразователь, то передающий элемент, выполненный в виде катушки, подключенной к выходу генератора, создает в пространстве, окружающем канат, переменное магнитное поле. Металлические предметы, окружающие канат, взаимодействуют с этим полем и также приводят к изменению выходного напряжения на приемном элементе, выполненном в виде приемной катушки. Ветви каната, подвижная обойма полиспаста, элементы конструкции грузоподъемной машины и т.д., выполненные из ферромагнитных материалов, приводят к уменьшению магнитного сопротивления среды и соответственно к увеличению выходного напряжения приемного элемента. Далее аналогичным образом формируются выходные сигналы о кратности запасовки полиспаста, о пространственном положении подвижной обоймы, о положении датчика относительно элементов конструкции грузоподъемной машины и т.д.
В случае применения ультразвукового дополнительного датчика, его приемный элемент фиксирует ультразвуковые сигналы, сформированные ультразвуковым передающим элементом и отраженные отдельными ветвями каната, подвижной обоймой полиспаста и т.д. При этом микроконтроллер 5 может фиксировать амплитуду принимаемых сигналов, время их прихода (при выполнении генератора с модуляцией его выходного сигнала) и т.д. Далее обработка сигналов осуществляется аналогично обработке сигналов в устройстве с емкостным или индуктивным первичным преобразователем.
Аналогичным образом могут использоваться оптические, в частности инфракрасные, дополнительные датчики.
В итоге, кроме углов наклона каната по отдельным осям Х и Y (углов α и β) и результирующего угла отклонения каната γ, устройство, в случае необходимости, дополнительно определяет усилие натяжения каната или нагрузку на грузозахватном органе F, положение подвижной обоймы полиспаста (положение грузозахватного органа или длины средства для подвески), в частности определяет предельный подъем грузозахватного органа, а также кратность полиспаста и приближение к ЛЭП или к другим подвижным или неподвижным препятствиям.
Причем в устройстве, в соответствии с вышеизложенным, может использоваться как один, так и несколько дополнительных датчиков, подключенных к дополнительным входам аналого-цифрового преобразователя (АЦП) 3 или интерфейсного устройства 6 электронной схемы обработки выходных сигналов датчиков 3. Возможно использование одновременно всех дополнительных датчиков, либо их меньшего количества в любом сочетания. Например, дополнительно может использоваться только один датчик приближения к линии электропередачи, или только один датчик приближения к подвижным или к неподвижным препятствиям, или только один датчик натяжения каната, или только один датчик кратности полиспаста. Возможно также одновременное использование двух или трех дополнительных датчиков, например датчика приближения к линии электропередачи и датчика кратности полиспаста, датчика приближения к подвижным или к неподвижным препятствиям и датчика натяжения каната, датчика кратности полиспаста и датчика приближения к линии электропередачи и т.д.
Изменение количества и типов используемых дополнительных датчиков приводит к изменению количества дополнительных входов АЦП 3 или интерфейсного устройства 6, а также к корректировке программы работы микроконтроллера 5, обеспечивающего обработку выходных сигналов этих дополнительных датчиков. Схемотехнические методы увеличения количества входов АЦП 4 или интерфейсных устройств 6 и соответствующего изменения программы работы микроконтроллера общеизвестны.
При наличии в составе интерфейсного устройства 6 силовых ключей устройство формирует сигналы управления исполнительными механизмами грузоподъемной машины. В частности сигналы защитного отключения грузоподъемной машины с целью предотвращения ее перегрузки, сигналы остановки грузовой лебедки при достижении верхнего предельного положения грузозахватного органа или при недопустимо большом угле отклонения грузового каната от вертикального положения и т.д.
В простейшем случае это осуществляется путем сравнения микроконтроллером 5 выходного сигнала какого-либо датчика с его предельным (максимальным или минимальным) допустимым значением, предварительно записанным в памяти микроконтроллера 5.
Благодаря наличию микроконтроллера 5 возможна также реализация более сложных алгоритмов защиты грузоподъемной машины. В частности, при расположении устройства на стреловом канате грузоподъемного крана с фиксированной длиной стрелы в предложенном устройстве после измерения угла наклона каната (или, что эквивалентно, угла наклона стрелы) и усилия в этом канате возможно вычисление грузового момента и соответственно формирование сигналов управления силовыми ключами интерфейсного устройства 6, направленными на предотвращение перегрузки крана по грузовому моменту.
Из изложенного следует, что применение в устройстве указанных дополнительных датчиков в любом сочетании, а также силовых ключей для реализации управления механизмами машины приводит к достижению дополнительной технической задачи изобретения - к расширению функциональных возможностей устройства и не влияет на достижение основных технических задач.
Независимо от наличия дополнительных датчиков в системе, т.е. независимо от реализации контроля предельного подъема подвижной обоймы или грузозахватного органа, приближения к ЛЭП, усилия в канате, кратности полиспаста и приближения к канату какого-либо объекта, а также независимо от реализации возможности управления машиной в устройстве обеспечивается определение результирующей величины угла наклона каната относительно гравитационной вертикали при его отклонении одновременно в двух плоскостях, достигается упрощение устройства, повышение его надежности, упрощение технического обслуживания, а также повышение точности измерения угла наклона каната.
В данном описании схематично приведены лишь частные варианты реализации предложенного устройства. Изобретение охватывает другие возможные варианты его исполнения и их эквиваленты без отступления от сущности изобретения, изложенной в его формуле.
Источники информации
1. SU 1257050 A1, МПК4 B66C 13/06, 15/00, 15.09.1986.
2. SU 1572981 A1, МПК4 B66C 13/06, 23.06.1990.
3. RU 2025451 C1, МПК5 B66C 15/00, 30.12.1994.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КРАТНОСТИ ЗАПАСОВКИ ПОЛИСПАСТА | 2006 |
|
RU2341445C2 |
| СИСТЕМА ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА (ВАРИАНТЫ) | 2006 |
|
RU2335451C1 |
| СПОСОБ НАСТРОЙКИ ПРИБОРА БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА И РЕАЛИЗУЮЩИЙ ЕГО ПРИБОР БЕЗОПАСНОСТИ | 2005 |
|
RU2307061C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ АВАРИЙ ПРИ РАБОТЕ ГРУЗОПОДЪЕМНОГО КРАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2006 |
|
RU2306255C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ РАСКАЧИВАНИЯ ГРУЗА НА ГИБКОМ ПОДВЕСЕ (ВАРИАНТЫ) | 2009 |
|
RU2406679C2 |
| СПОСОБ ПОВЫШЕНИЯ БЕЗОПАСНОСТИ РАБОТЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2270162C2 |
| ЭЛЕКТРОННАЯ СИСТЕМА ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2009 |
|
RU2405736C1 |
| Способ обмена информацией между модулями системы безопасности грузоподъемной машины и устройство для его осуществления | 2022 |
|
RU2778173C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛОВ НАКЛОНА КАНАТОВ ПРИ СДВОЕННОМ ПОЛИСПАСТЕ | 2010 |
|
RU2431596C1 |
| УСТРОЙСТВО БЕЗОПАСНОСТИ МАШИНЫ С ГРАФИЧЕСКИМ ДИСПЛЕЕМ | 2010 |
|
RU2448036C1 |
Группа изобретений относится к подъемно-транспортной технике. В первом варианте устройство содержит корпус, прикрепленный посредством подвижного или неподвижного соединения к грузоподъемной машине с возможностью взаимодействия с ее канатом и датчик углового положения, установленный внутри этого корпуса, электронную схему обработки выходных сигналов датчиков, а также, по меньшей мере, один дополнительный датчик натяжения каната, и/или датчик нагрузки на грузозахватном органе, и/или датчик положения подвижной обоймы полиспаста, и/или датчик положения грузозахватного органа. Выходы датчика углового положения и, по меньшей мере, одного из указанных дополнительных датчиков подключены к входам электронной схемы обработки выходных сигналов датчиков. Во втором варианте устройство содержит корпус, внутри которого установлен один датчик углового положения или два датчика углового положения в двух взаимно перпендикулярных плоскостях, и обойму, прикрепленную к корпусу или выполненную с корпусом за одно целое, через которую пропущен канат, и средство для подвески корпуса к грузоподъемной машине, электронную схему обработки выходных сигналов датчиков, датчик длины или натяжения средства для подвески корпуса к грузоподъемной машине или датчик приближения подвижной обоймы полиспаста. Изобретение обеспечивает определение результирующей величины угла наклона каната при его отклонении одновременно в двух плоскостях, упрощение устройства, повышение его надежности и точности измерения, а также расширение функциональных возможностей устройства. 2 н. и 23 з.п. ф-лы, 1 ил.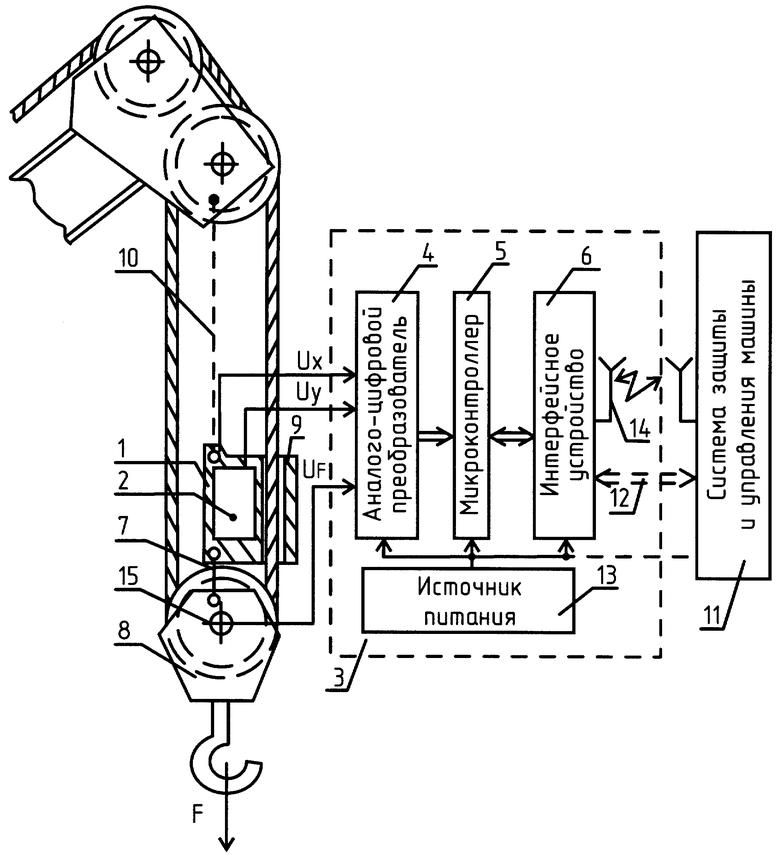
| Способ нитрования альфа -сульфокислоты нафталина | 1936 |
|
SU55967A1 |
| Способ приготовления препарата анабазина для целей борьбы с вредителями сельского хозяйства | 1935 |
|
SU47865A1 |
| Устройство для питания контактной линии шахты | 1935 |
|
SU48525A1 |
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ АКСЕЛЕРОМЕТР-КЛИНОМЕТР | 2005 |
|
RU2279092C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ И ИНДИКАЦИИ НАКЛОНА ГРУЗОВОГО КАНАТА | 1991 |
|
RU2025451C1 |
| US 5730305 A, 24.03.1998. | |||

