ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение относится к устройству беспроводной подачи энергии и устройству помощи при парковке.
УРОВЕНЬ ТЕХНИКИ
[0002] Известны устройства беспроводной подачи энергии для зарядки аккумуляторов, установленных, например, в электрических транспортных средствах, через беспроводное соединение между катушками приема энергии, обеспеченными в транспортных средствах, и катушками передачи энергии, обеспеченными на стороне земли. Устройство беспроводной подачи энергии может эффективно подавать электрическую энергию путем регулирования относительного положения между катушкой передачи энергии и катушкой приема энергии. В связи с этим известна система помощи при парковке, оборудованная камерой для получения изображения задней стороны транспортного средства и помощи в позиционировании катушки передачи энергии и катушки приема энергии во время парковки на основе изображения, получаемого камерой (относится к патентной литературе 1).
СПИСОК ССЫЛОК
ПАТЕНТНАЯ ЛИТЕРАТУРА
[0003] Патентная литература 1: Японская нерассмотренная публикация заявки на патент № 2011-015549.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
ТЕХНИЧЕСКАЯ ПРОБЛЕМА
[0004] Однако система, описанная в патентном документе 1, может не получать изображение с камеры с катушкой передачи энергии (в частности, кожуха для размещения катушки передачи энергии), захватываемой ей, в зависимости от направления, в котором транспортное средство направлено. Хотя традиционные транспортные средства могут включать в себя систему монитора кругового обзора (AVM) для получения изображения периферии транспортного средства и отображения получаемого таким образом изображения и преобразуемого в изображение вида с высоты птичьего полета на мониторе в транспортном средстве, отображаемый диапазон, получаемый системой AVM, ограничен областью непосредственно вокруг транспортного средства. Если катушка передачи энергии расположена не очень далеко от транспортного средства на задней стороне, катушка передачи энергии не может быть отображена на изображении вида с высоты птичьего полета. В результате положение катушки передачи энергии не может быть указано в качестве цели для парковки на основе полученного изображения с камеры или изображения вида с высоты птичьего полета.
[0005] Настоящее изобретение выполнено с учетом традиционной проблемы, описанной выше. Задачей настоящего изобретения является обеспечение устройства беспроводной подачи энергии и устройства помощи при парковке, способных к указанию целевой позиции парковки с высокой точностью.
[0006] Устройство беспроводной подачи энергии согласно аспекту настоящего изобретения включает в себя метку, обеспеченную ближе к стороне, где транспортное средство входит при парковке, чем блок катушки передачи энергии, вмещающий катушку передачи энергии. Метка включает в себя по меньшей мере два сегмента, не параллельных друг другу, и концевой участок одного сегмента соединен с другим сегментом. Катушка передачи энергии отделена на заданное расстояние от точки пересечения двух сегментов в направлении, в котором один сегмент продолжается.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
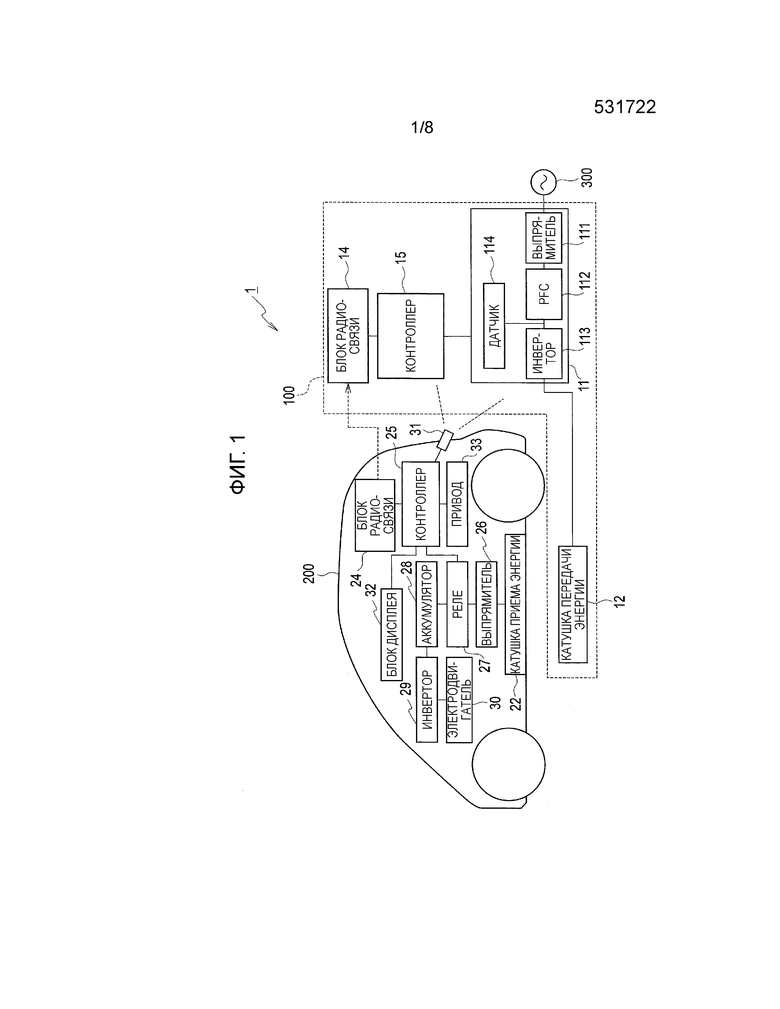
[0007] [Фиг. 1] Фиг. 1 представляет собой блок-схему, показывающую конфигурацию системы беспроводной зарядки, включающей в себя устройство беспроводной подачи энергии согласно настоящему варианту выполнения.
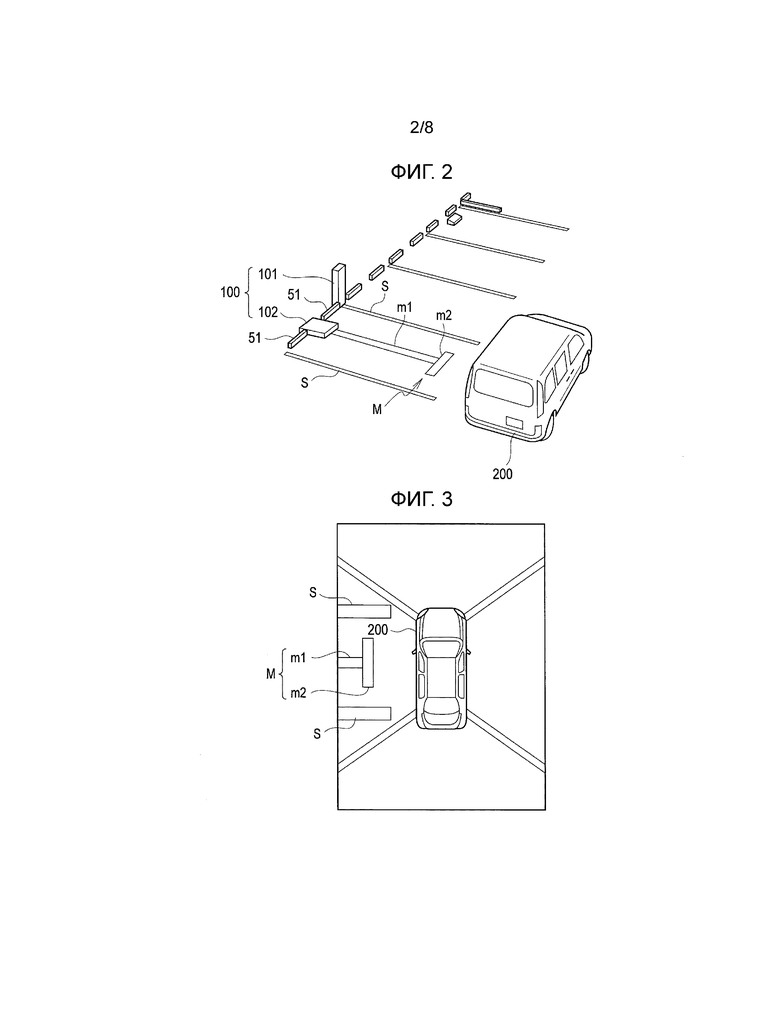
[Фиг. 2] Фиг. 2 представляет собой вид, показывающий пример состояния установки устройства 100 беспроводной подачи энергии согласно настоящему варианту выполнения.
[Фиг. 3] Фиг. 3 представляет собой схематический вид, показывающий пример изображения вида с высоты птичьего полета, отображаемого на блоке 32 дисплея, установленном в транспортном средстве 200, показанном на Фиг. 2.
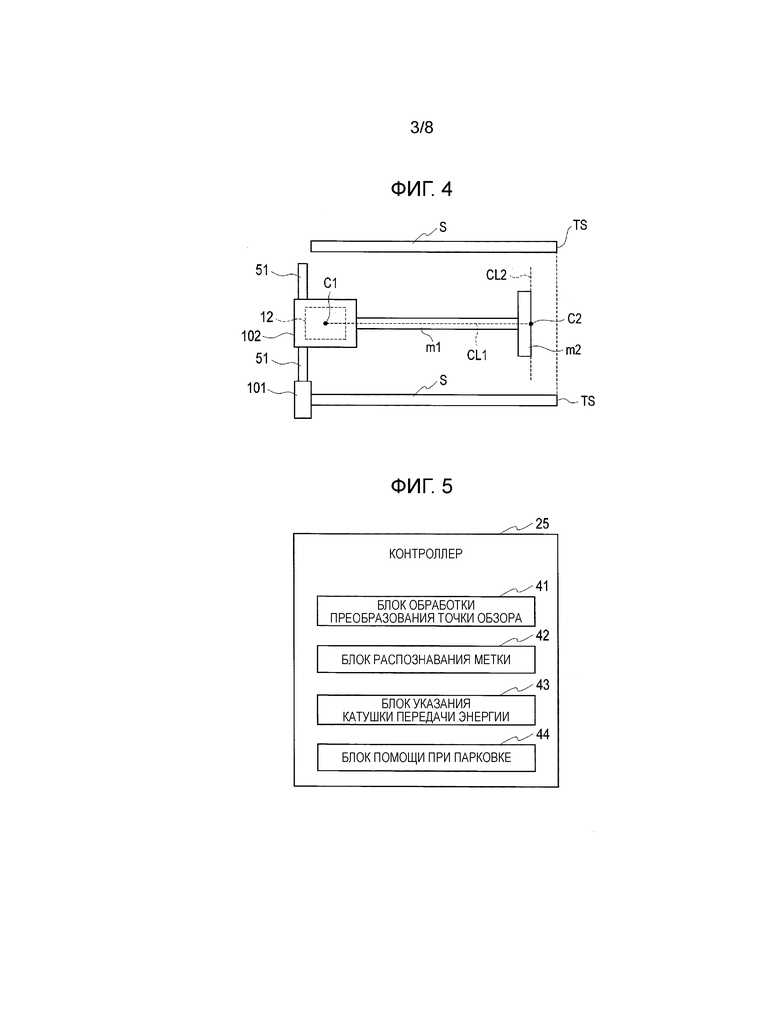
[Фиг. 4] Фиг. 4 представляет собой вид сверху при рассмотрении сверху устройства 100 беспроводной подачи энергии, показанного на Фиг. 2.
[Фиг. 5] Фиг. 5 представляет собой блок-схему, показывающую функциональную конфигурацию контроллера 25, включенного в устройство помощи при парковке согласно варианту выполнения.
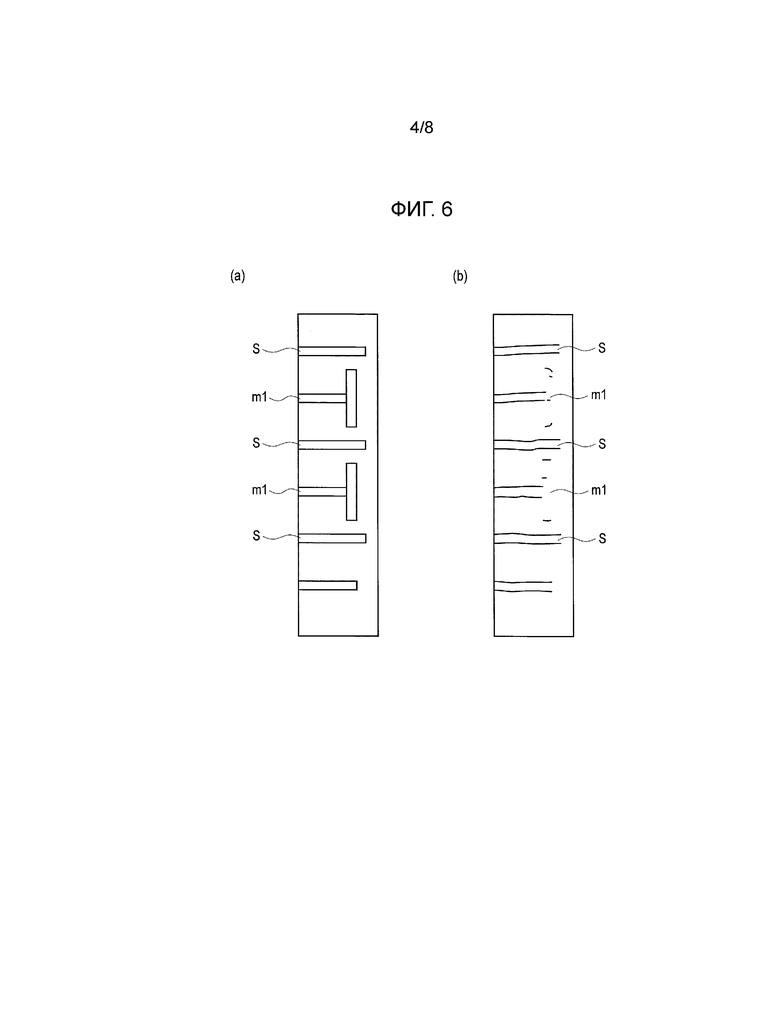
[Фиг. 6] Фиг. 6(a) представляет собой вид, показывающий изображение вида с высоты птичьего полета, создаваемое блоком 41 обработки преобразования точки обзора и отображаемое в двух цветах, и Фиг. 6(b) представляет собой вид, показывающий изображение края, выделяемое, когда изображение на Фиг. 6(a) сканируется в вертикальном направлении (в направлении, перпендикулярном границе S парковки).
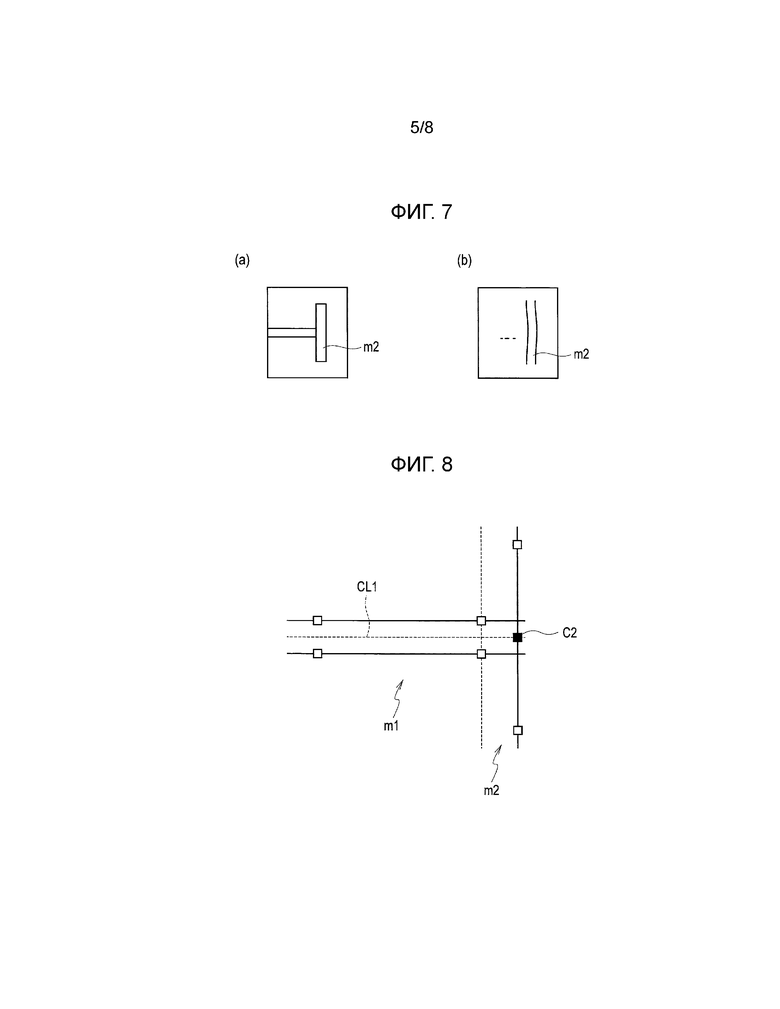
[Фиг. 7] Фиг. 7(а) представляет собой вид, показывающий изображение вида с высоты птичьего полета, созданное блоком 41 обработки преобразования точки обзора и отображаемое в двух цветах, и Фиг. 7(b) представляет собой вид, показывающий изображение края, выделяемое, когда изображение на Фиг. 7(а) сканируется в боковом направлении (в направлении, параллельном границе S парковки).
[Фиг. 8] Фиг. 8 представляет собой схематический вид, показывающий направление CL1 и пересечение C2, указанные на основе изображений краев на Фиг. 6(b) и Фиг. 7(b).
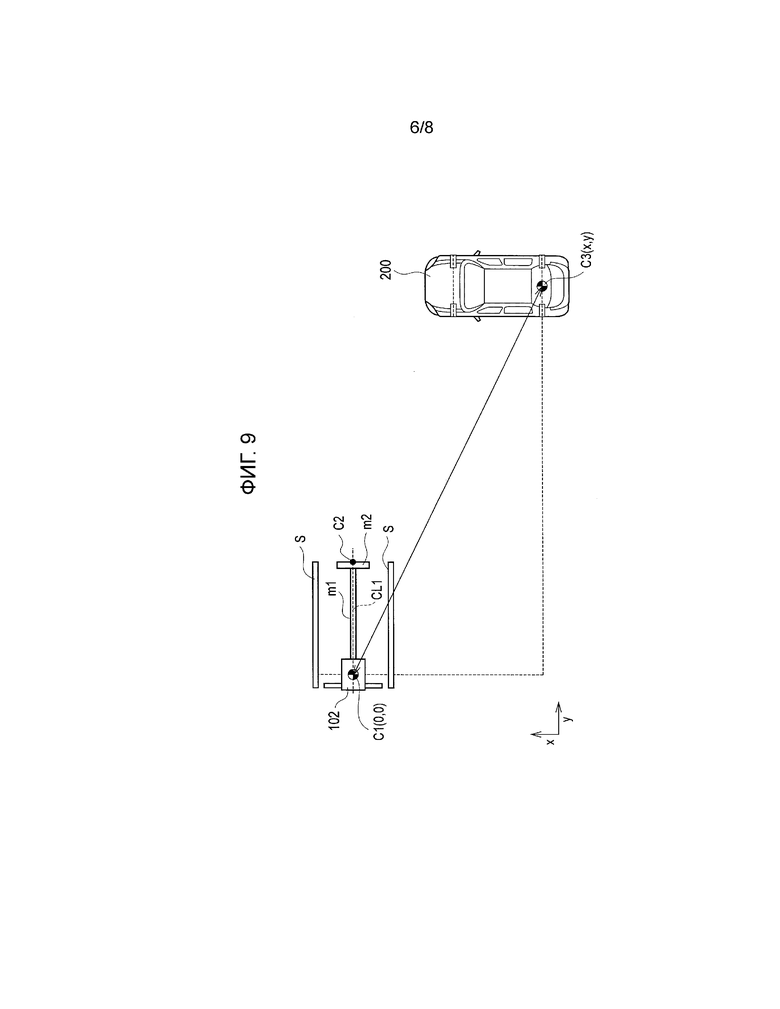
[Фиг. 9] Фиг. 9 представляет собой схематический вид, показывающий пример отображения положения блока 102 катушки передачи энергии (катушки 12 передачи энергии), указываемого блоком 43 указания катушки передачи энергии.
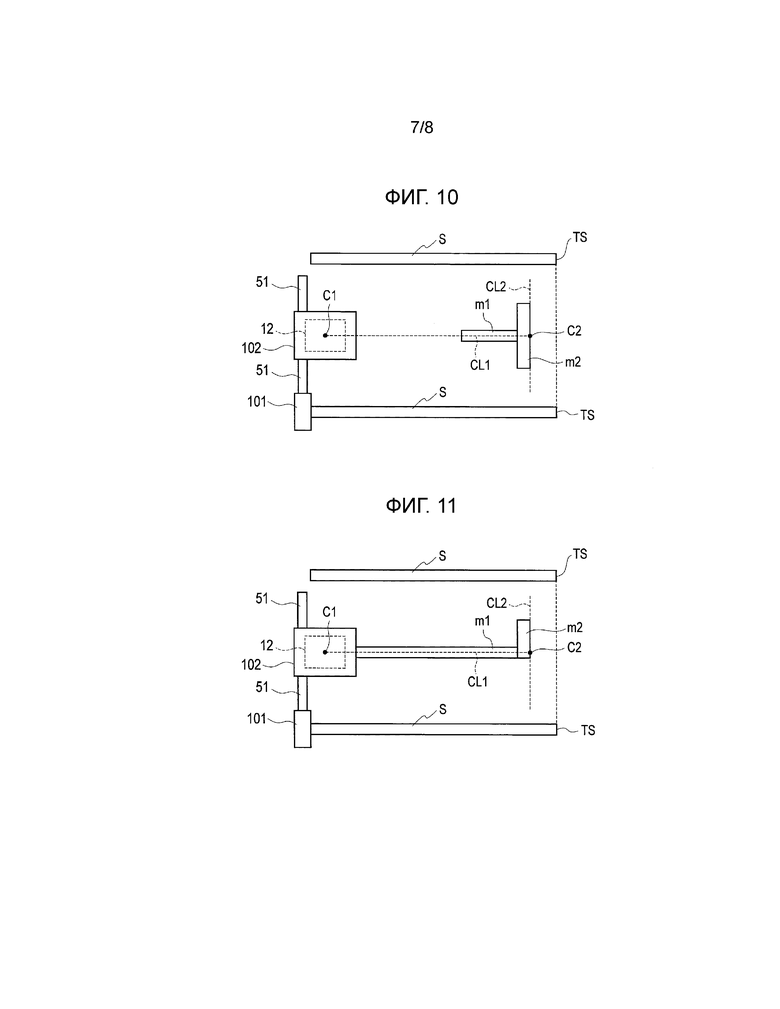
[Фиг. 10] Фиг. 10 представляет собой вид сверху, показывающий форму метки М согласно первому модифицированному примеру.
[Фиг. 11] Фиг. 11 представляет собой вид сверху, показывающий форму метки М согласно второму модифицированному примеру.
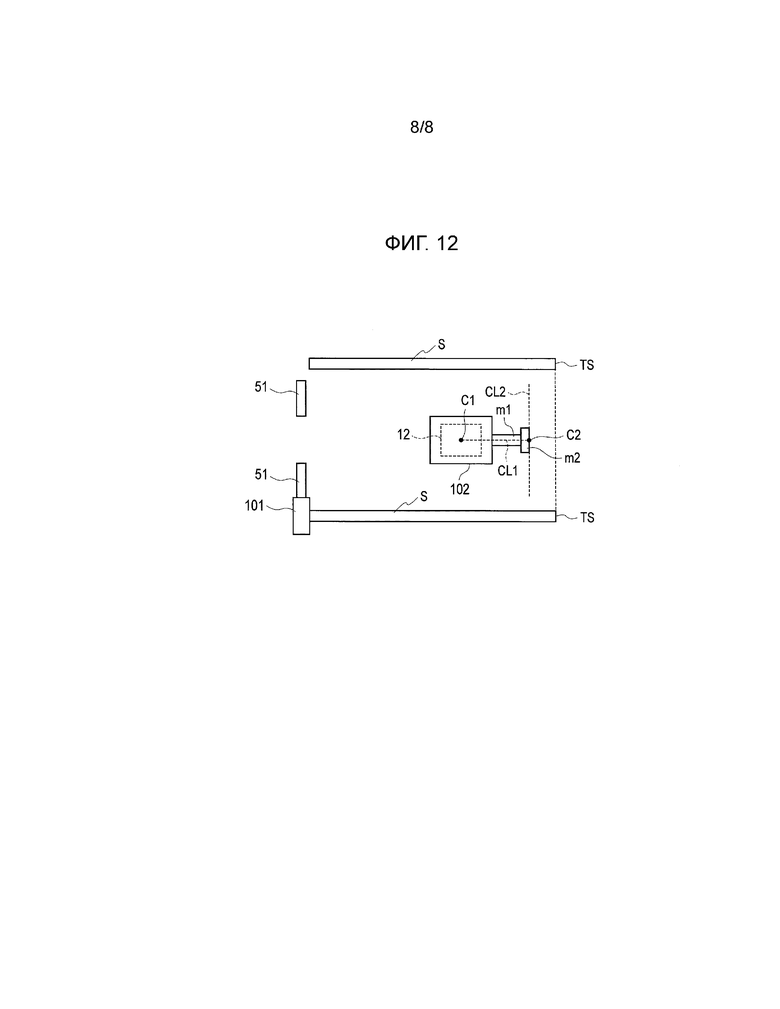
[Фиг. 12] Фиг. 12 представляет собой вид, показывающий состояние установки устройства 100 беспроводной подачи энергии согласно третьему модифицированному примеру.
ОПИСАНИЕ ВАРИАНТОВ ВЫПОЛНЕНИЯ
[0008] Далее со ссылкой на чертежи будет объяснен вариант выполнения настоящего изобретения. Во-первых, конфигурация системы беспроводной зарядки, включающей в себя устройство беспроводной подачи энергии согласно варианту выполнения, объяснена ниже со ссылкой на Фиг. 1. Система 1 беспроводной зарядки согласно варианту выполнения включает в себя блок на стороне транспортного средства, установленный в транспортном средстве 200, и устройство 100 беспроводной подачи энергии в виде блока со стороны земли, обеспеченного на земле. Система 1 беспроводной зарядки подает электрическую энергию через беспроводное соединение от устройства 100 беспроводной подачи энергии к блоку на стороне транспортного средства для зарядки аккумулятора 28, установленного на транспортном средстве 200.
[0009] Устройство 100 беспроводной подачи энергии размещено, например, в стенде подачи энергии или площадке для парковки. Устройство 100 беспроводной подачи энергии подает электрическую энергию через беспроводное соединение от катушки 12 передачи энергии к катушке 22 приема энергии, описанных ниже, в состоянии, в котором транспортное средство 200 припарковано в заданной позиции парковки. Устройство 100 беспроводной подачи энергии включает в себя контроллер 11 питания, катушку 12 передачи энергии, блок 14 радиосвязи и контроллер 15.
[0010] Контроллер 11 питания преобразует энергию переменного тока, передаваемую от источника 300 энергии переменного тока, в высокочастотную энергию переменного тока и передает преобразованную энергию на катушку 12 передачи энергии. Контроллер 11 питания включает в себя выпрямитель 111, схема 112 коррекции коэффициента мощности (PFC), инвертор 113 и датчик 114.
[0011] Выпрямитель 111 электрически соединен с источником 300 энергии переменного тока для выпрямления энергии переменного тока, выходящей из источника 300 энергии переменного тока. Схема 112 PFC улучшает коэффициент мощности путем выпрямления колебательных сигналов, выходящих из выпрямителя 111, и соединена между выпрямителем 111 и инвертором 113. Инвертор 113 представляет собой схему преобразования энергии, включающую в себя схему управления PWM, имеющую сглаживающий конденсатор и переключающее устройство, такое как IGBT. Инвертор 113 преобразует энергию постоянного тока, выходящую из схемы 112 PFC, в высокочастотную энергию переменного тока и подает преобразованную энергию на катушку 12 передачи энергии согласно сигналу управления переключением от контроллера 15. Датчик 114 соединен между схемой 112 PFC и инвертором 113 для обнаружения тока и напряжения, протекающих между схемой 12 PFC и инвертором 113.
[0012] Катушка 12 передачи энергии используется для подачи электрической энергии через беспроводное соединение на катушку 22 приема энергии, установленную на транспортном средстве 200, и намотана на ось катушки в направлении, параллельном поверхности дороги в парковочном месте. Катушка 12 передачи энергии обеспечена в парковочном месте. В частности, катушка 12 передачи энергии обеспечена таким образом, чтобы размещаться непосредственно ниже и удерживаться на расстоянии от катушки 22 приема энергии, когда транспортное средство 200 припарковано в соответствующей позиции парковки на парковочном месте.
[0013] Блок 14 радиосвязи связывается с блоком 24 радиосвязи, установленным в транспортном средстве 200. Частота при связи между блоком 14 радиосвязи и блоком 24 радиосвязи выше, чем используемая для периферийных устройств для транспортного средства, таких как Intelligent Key (зарегистрированный товарный знак). Блок 14 радиосвязи и блок 24 радиосвязи связываются друг с другом с помощью средства, подходящего для дальней связи, включающего в себя различные виды беспроводных локальных сетей.
[0014] Контроллер 15 управляет контроллером 11 питания и блоком 14 радиосвязи. Контроллер 15 передает управляющий сигнал для запуска подачи энергии от устройства 100 беспроводной подачи энергии по направлению к транспортному средству 200 через связь между радиосвязью 14 и радиосвязью 24. Контроллер 15 принимает со стороны транспортного средства 200 сигнал запроса для запроса электрической энергии, подаваемой от устройства 100 беспроводной подачи энергии. Контроллер 15 управляет операцией переключения инвертора 113 на основе сигнала запроса и тока, обнаруживаемого датчиком 114, так, чтобы регулировать электрическую энергию, передаваемую от катушки 12 передачи энергии.
[0015] Транспортное средство 200 включает в себя в качестве блока на стороне транспортного средства катушку 22 приема энергии, блок 24 радиосвязи, контроллер 25, выпрямитель 26, реле 27, аккумулятор 28, инвертор 29 и электродвигатель 30. Катушка 22 приема энергии используется для приема электрической энергии через беспроводное соединение от катушки 12 передачи энергии устройства 100 беспроводной подачи энергии. Катушка 22 приема энергии размещена на нижней части транспортного средства и, например, между задними колесами. Катушка 22 приема энергии намотана на ось катушки в направлении, параллельном поверхности дороги в парковочном месте таким же образом, что и катушка 12 передачи энергии. Катушка 22 приема энергии обеспечена таким образом, чтобы размещаться непосредственно над и удерживаться на расстоянии от катушки 12 передачи энергии, когда транспортное средство 200 припарковано в соответствующей позиции парковки на парковочном месте.
[0016] Блок 24 радиосвязи связывается с блоком 14 радиосвязи устройства 100 беспроводной подачи энергии. Выпрямитель 26 представляет собой выпрямительную схему, соединенную с катушкой 22 приема энергии для выпрямления энергии переменного тока, принимаемой катушкой 22 приема энергии, в энергию постоянного тока. Реле 27 включает в себя релейный переключатель, включаемый/выключаемый на основе управления контроллером 25, и функционирует для отсоединения системы высокой мощности, включающей в себя аккумулятор 28, от участка 22 приема энергии и выпрямителя 26, служащего в качестве схемы для зарядки, как только релейный переключатель выключается.
[0017] Аккумулятор 28 представляет собой источник энергии транспортного средства 200 и выполнен так, что множество вторичных аккумуляторов соединены друг с другом. Инвертор 29 представляет собой схему преобразования энергии, включающую в себя схему управления PWM, имеющую сглаживающий конденсатор и переключающее устройство, такое как IGBT. Инвертор 29 преобразует энергию постоянного тока, выходящую из аккумулятора 28, в энергию переменного тока и подает преобразованную энергию на электродвигатель 30 согласно сигналу управления переключением от контроллера 15. Электродвигатель 30, например, представляет собой трехфазный электродвигатель переменного тока, служащий в качестве источника энергии привода для приведения в движение транспортного средства 200.
[0018] Контроллер 25 включает в себя центральный блок обработки (CPU), микропроцессорный блок (MPU) или микроконтроллер и управляет зарядкой аккумулятора 28 и связью блока 24 радиосвязи. Контроллер 25 передает сигнал для начала зарядки контроллеру 15 устройства 100 беспроводной подачи энергии через блок 24 радиосвязи и блок 14 радиосвязи. Контроллер 25 соединен с контроллером для управления всем транспортным средством 200 через сеть CAN (не показана на чертеже). Этот контроллер управляет управлением переключения инвертора 29 и состоянием зарядки (SOC) аккумулятора 28. Контроллер 25 определяет, полностью ли заряжен аккумулятор 28 на основе SOC, и передает сигнал для остановки зарядки в контроллер 25 устройства 100 беспроводной подачи энергии, когда аккумулятор полностью заряжен.
[0019] Система 1 беспроводной зарядки осуществляет передачу и прием высокочастотной электрической энергии между катушкой 12 передачи энергии и катушкой 22 приема энергии беспроводным образом с помощью электромагнитной индукции. Другими словами, как только напряжение подано на катушку 12 передачи энергии, вызывается магнитное соединение между катушкой 12 передачи энергии и катушкой 22 приема энергии так, чтобы подавать электрическую энергию от катушки 12 передачи энергии на катушку 22 приема энергии.
[0020] Транспортное средство 200 оборудовано камерой 31 и блок 32 дисплея. Камера 31 включает в себя множество камер для получения изображения задней стороны, передней стороны и обеих правой и левой сторон транспортного средства 200 для получения изображений с камеры. Контроллер 25 преобразует каждое изображение с камеры, полученное с помощью камеры 31, в изображение вида с высоты птичьего полета (пример изображения с преобразованной точкой обзора) при рассмотрении сверху камеры 31. Контроллер 25 образует изображение вида с высоты птичьего полета (изображение кругового обзора), показывающее периферию транспортного средства 200 таким образом, чтобы соединять множество изображений вида с высоты птичьего полета вместе и передавать изображение вида с высоты птичьего полета, показывающее периферию транспортного средства, на блок 32 дисплея. Блок 32 дисплея представляет собой дисплей, расположенный в положении, куда водитель может посмотреть, и отображает изображение вида с высоты птичьего полета, показывающее периферию транспортного средства водителю.
[0021] Транспортное средство 200 оборудовано приводом 33 для работы по приведению в движение транспортного средства 200. В частности, привод 33 включает в себя рулевой привод для рулевого управления передними колесами транспортного средства 200 и тормозной привод для приведения в действие тормоза для торможения транспортного средства 200. Работа привода 33 управляется контроллером 25.
[0022] Пример внешней конфигурации устройства 100 беспроводной подачи энергии объясняется ниже со ссылкой на Фиг. 2. Устройство 100 беспроводной подачи энергии включает в себя корпус 101 устройства подачи энергии, блок 102 катушки передачи энергии и метку М. Корпус 101 устройства подачи энергии представляет собой кожух, вмещающий по меньшей мере контроллер 11 питания, блок 14 радиосвязи и контроллер 15, показанные на Фиг. 1. Блок 102 катушки передачи энергии представляет собой кожух, вмещающий по меньшей мере катушку 12 передачи энергии, показанную на Фиг. 1. Блок 102 катушки передачи энергии расположен в парковочном месте, ограниченном границами S парковки. В примере, показанном на Фиг. 2, блок 102 катушки передачи энергии расположен между противооткатными упорами 51. Относительное положение между блоком 102 катушки передачи энергии и катушкой 22 приема энергии может регулироваться таким образом, чтобы парковать транспортное средство 200 в состоянии, в котором задние колеса транспортного средства 200 находятся в контакте с противооткатными упорами 51. Транспортное средство 200 перемещается и паркуется на парковочном месте таким образом, что катушка 22 приема энергии размещается над блоком 102 катушки передачи энергии с помощью устройства помощи при парковке согласно варианту выполнения. Метка М обеспечена на поверхности дороги в парковочном месте.
[0023] Изображение вида с высоты птичьего полета, показывающее периферию транспортного средства 200, которое показано на Фиг. 3, отображается на блоке 32 дисплея, установленном в транспортном средстве 200, показанном на Фиг. 2. Так как отображаемый диапазон монитор кругового обзора (AVM) ограничен областью, смежной периферии транспортного средства 200, часть метки М (включая по меньшей мере точку пересечения между одним сегментом m1 и другим сегментом m2) отображается на блоке 32 дисплея. Блок 102 катушки передачи энергии не отображается на блоке 32 дисплея. Таким образом, сложно подтвердить целевую позицию парковки (блок 102 катушки передачи энергии) непосредственно с помощью блока 32 дисплея.
[0024] Фиг. 4 представляет собой вид сверху при рассмотрении сверху устройства 100 беспроводной подачи энергии, показанного на Фиг. 2. Метка М расположена на стороне, где транспортное средство 200 входит при парковке, и на противоположной стороне блока 102 катушки передачи энергии. Метка М состоит, например, из светящегося тела, такого как светодиод, знака, изображенного на поверхности дороги или трехмерном объекте. Здесь трехмерный объект, разумеется, должен иметь высоту такую, чтобы размещаться под транспортным средством 200. Метка М обеспечена «на противоположной стороне блока 102 катушки передачи энергии» так, чтобы указывать на наличие блока 102 катушки передачи энергии. В связи с этим метка М не обеспечена на парковочном месте, в котором не обеспечено устройство 100 беспроводной подачи энергии.
[0025] Метка М включает в себя по меньшей мере два сегмента (m1, m2), не параллельных друг другу, и имеет конфигурацию, в которой один конец одного сегмента m1 соединен с другим сегментом m2. Здесь «один сегмент m1 соединен с другим сегментом m2» включает в себя, как описано ниже, случай, в котором один конец одного сегмента m1 разнесен от другого сегмента m2 на расстояние, способное к обозначению точки пересечения C2 между одним сегментом m1 и другим сегментом m2 путем обработки изображения. Например, один конец одного сегмента m1 может быть незначительно отделен от другого сегмента m2 при рассмотрении с близкого расстояния, хотя они, казалось бы, находятся в контакте друг с другом при рассмотрении издалека. Блок 102 катушки передачи энергии отделен на заданное расстояние от точки пересечения C2 двух сегментов (m1, m2) в направлении, в котором один сегмент m1 продолжается.
[0026] В примере, показанном на Фиг. 4, один сегмент m1 продолжается от периферии блока 102 катушки передачи энергии по направлению к стороне, где транспортное средство 200 входит при парковке, и один конец одного сегмента m1 соединен с другим сегментом m2. Другими словами, один сегмент m1 соединяет блок 102 катушки передачи энергии и другой сегмент m2. Другой сегмент m2 является ортогональным продольному направлению парковочного места. Продольное направление парковочного места параллельно направлению, в котором транспортное средство 200 входит при парковке, а также параллельно границам S парковки, показанным на Фиг. 4. А именно, один сегмент m1 находится под прямым углом к другому сегменту m2.
[0027] Один сегмент m1 длиннее другого сегмента m2. Один конец одного сегмента m1 соединен со средней точкой другого сегмента m2. Дополнительно, прямая линия CL1, простирающаяся и продолжающаяся от одного сегмента m1, проходит через середину C1 катушки 12 передачи энергии. Здесь «середина C1 катушки 12 передачи энергии» представляет собой центр между крайними концами участка в катушке 12 передачи энергии, на который намотан литцендрат. Конец одного сегмента m1, соединенный с другим сегментом m2, находится ближе к катушке 12 передачи энергии, чем концевые участки границ S парковки.
[0028] Метка М используется для указания точки пересечения C2 между одним сегментом m1 и другим сегментом m2 и направления (вектора) CL1, в котором один сегмент m1 продолжается. Таким образом, положение блока 102 катушки передачи энергии, отделенного от точки пересечения C2 на заданное расстояние в векторе CL1, может быть указано с высокой точностью.
[0029] Далее устройство помощи при парковке для помощи при парковке транспортного средства 200 путем указания положения блока 102 катушки передачи энергии на основе метки М объясняется ниже. Устройство помощи при парковке включает в себя камеру 31, контроллер 25 и привод 33, установленный в транспортном средстве 200. Контроллер 25 выполняет обработку информации в соответствии с компьютерной программы, в которой записан процесс помощи при парковке транспортного средства 200. Конкретная функция обработки информации, выполняемой контроллером 25, объясняется ниже. Как показано на Фиг. 5, контроллер 25 функционирует в качестве блока 41 обработки преобразования точки обзора, блока 42 распознавания метки, блока 43 указания катушки передачи энергии и блока 44 помощи при парковке.
[0030] Блок 41 обработки преобразования точки обзора преобразует изображение с камеры, получаемой камерой 31, в изображение вида с высоты птичьего полета при рассмотрении сверху камеры 31. В варианте выполнения контроллер 25 образует и отображение изображение вида с высоты птичьего полета вокруг транспортного средства 200, как показано на Фиг. 3, таким образом, чтобы соединять множество изображений вида с высоты птичьего полета вместе. Требуется только блок 41 обработки преобразования точки обзора для преобразования по меньшей мере изображения с камеры, на котором изображена метка М, среди множества изображений вида с высоты птичьего полета в изображение вида с высоты птичьего полета.
[0031] Блок 42 распознавания метки указывает точку пересечения C2 двух сегментов (m1, m2) и направление CL1, в котором один сегмент m1 продолжается от точки пересечение C2, ссылаясь на изображение вида с высоты птичьего полета, создаваемое блоком 41 обработки преобразования точки обзора. Конкретная операция обработки блока 42 распознавания метки будет объяснена ниже со ссылкой на Фиг. 6-8.
[0032] Блок 43 указания катушки передачи энергии использует точку пересечения C2 и направление CL1, указанное блоком 42 распознавания метки, для указания положения блока 102 катушки передачи энергии (катушки 12 передачи энергии), отделенного от точки пересечения C2 на заданное расстояние в направлении CL1. Например, как показано на Фиг. 9, блок 43 указания катушки передачи энергии вычисляет координаты (x, y) середины C3 катушки 22 приема энергии, когда середина C1 катушки 12 передачи энергии представляет собой начало координат. Координатная система, показанная на Фиг. 9, включает в себя ось y в направлении ширины транспортного средства 200 и ось x в направлении перемещения транспортного средства 200.
[0033] Блок 44 помощи при парковке вычисляет траекторию, вдоль которой транспортное средство 200 перемещается из текущего положения к цели для парковки (блоку 102 катушки передачи энергии) на основе положения блока 102 катушки передачи энергии, указанного блоком 43 указания катушки передачи энергии. Траектория включает в себя комбинацию дуговой линии, прямой линии и клотоиды и может быть вычислена с помощью традиционных средств.
[0034] Блок 44 помощи при парковке также управляет приводом 33 и электродвигателем 30 для того, чтобы автономно приводить в движение транспортное средство 200 вдоль вычисленной траектории. Привод 33 приводит в действие тормоз транспортного средства 200 и управляет передними колесами транспортного средства 200 на основе управления блоком 44 помощи при парковке. Блок 44 помощи при парковке информирует водителя о переходе к автономному приведению в движение с помощью голоса или указания на блоке 32 дисплея.
[0035] Отметим, что блок 44 помощи при парковке не ограничивается примером автономного приведения в движение. Блок 44 помощи при парковке может, например, информировать водителя о перемещении вперед, перемещении назад, остановке и работе рулевого колеса с помощью голоса или указания на блоке 32 дисплея для того, чтобы водитель мог независимо перемещать транспортное средство 200 вдоль вычисленной траектории. В таком случае водитель может работать педалью газа, педалью тормоза, рычагом переключения или рулевым колесом так, чтобы перемещать транспортное средство 200 вдоль траектории по направлению к цели для парковки (блоку 102 катушки передачи энергии).
[0036] Блок 44 помощи при парковке может создавать изображение вида с высоты птичьего полета, показанное на Фиг. 9, и отображать изображение на блоке 32 дисплея во время либо автономного приведения в движение, либо приведения в движение водителем. Водитель может распознавать, что транспортное средство 200 движется вдоль траектории по направлению к цели для парковки (блоку 102 катушки передачи энергии) таким образом, что текущее положение транспортного средства 200 обновляется последовательно.
[0037] Далее обработка распознавания метки М блоком 42 распознавания метки объясняется ниже. Фиг. 6(a) и Фиг. 7(а) представляют собой изображения видов с высоты птичьего полета, создаваемые блоком 41 обработки преобразования точки обзора и обозначенные в двух цветах, и Фиг. 6(b) и Фиг. 7(b) представляют собой изображения краев, выделяемые из изображения на Фиг. 6(a). Фиг. 6(b) представляет собой изображение, полученное таким образом, чтобы вычерчивать края, выделяемые при сканировании пикселей в вертикальном направлении (в направлении, перпендикулярном границам S парковки). Фиг. 7(b) представляет собой изображение, полученное таким образом, чтобы вычерчивать края, выделяемые при сканировании пикселей в боковом направлении (в направлении, параллельном границам S парковки).
[0038] Как показано на Фиг. 6(b), края сегментов m1 меток М и границы S парковки выделяются. Направление, в котором сегменты m1 продолжаются, может быть указано с высокой точность на основе Фиг. 6(b); однако трудно точно указать положение одного конца каждого сегмента m1 на основе Фиг. 6(b). Как показано на Фиг. 7(b), край другого сегмента m2 выделяется. Соответственно, как показано на Фиг. 8, блок 42 распознавания метки может указывать направление CL1, в котором один сегмент m1 продолжается, с высокой точностью на основе изображения края на Фиг. 6(b). В то же время, блок 42 распознавания метки может указывать точку пересечения C2 между одним сегментом m1 и другим сегментом m2 с высокой точностью путем дополнительной ссылки на изображение края на Фиг. 7(b).
[0039] Конец одного сегмента m1, соединенный с другим сегментом m2, расположен ближе к катушке 12 передачи энергии, чем концевые участки границ S парковки. В связи с этим можно легко распознать из изображения края на Фиг. 6(b), что более длинными краями являются границы S парковки, и более короткими краями являются сегменты m1. Однако способ распознавания сегментов m1 не ограничивается этим. Например, среди краев, показанных на Фиг.6 (b), край, соединенный с краем другого сегмента m2, как показано на Фиг. 7(b), может использоваться для определения одного сегмента m1.
[0040] Здесь в качестве сравнительного примера случай, когда метка М включает в себя только один сегмент m1, сравнивается с вариантом выполнения. Трудно точно указать положение одного конца одного сегмента m1 из изображения, полученного таким образом, чтобы вычерчивать края, выделяемые при сканировании пикселей в боковом направлении (в направлении, параллельном границам S парковки) (соответствующего изображению на Фиг. 7(b)). Причина этого заключается в том, что ширина сегмента m1 меньше длины сегмента m1, и соответственно выделяемый край укорочен. В связи с этим метка М согласно варианту выполнения включает в себя один сегмент m1 и другой сегмент m2, не параллельные друг другу, так, чтобы указывать точку пересечения между одним сегментом m1 и другим сегментом m2 с высокой точностью.
[0041] Как описано выше, вариант выполнения настоящего изобретения может достигать следующих результатов.
[0042] Метка М расположена на стороне, где транспортное средство 200 входит при парковке, противоположной блоку 102 катушки передачи энергии. Метка М включает в себя по меньшей мере два сегмента (m1, m2), не параллельных друг другу, и имеет конфигурацию, в которой один конец одного сегмента m1 соединен с другим сегментом m2. Катушка 12 передачи энергии расположена и отделена на заданное расстояние от точки пересечения C2 двух сегментов (m1, m2) в направлении CL1, в котором один сегмент m1 продолжается. В связи с этим блок 42 распознавания метки может указывать точку пересечения C2 двух сегментов (m1, m2) и направление CL1, в котором один сегмент m1 продолжается от точки пересечения C2 с высокой точностью, ссылаясь на изображение вида с высоты птичьего полета, создаваемого блоком 41 обработки преобразования точки обзора. Соответственно, блок 43 указания катушки передачи энергии может указывать положение блока 102 катушки передачи энергии (катушки 12 передачи энергии) с высокой точность на основе точки пересечения C2 и направления CL1.
[0043] В качестве сравнительного примера случай, когда часть одного сегмента m1, отличная от его одного конца, пересекается с другим сегментом m2, сравнивается с настоящим вариантом выполнения. В таком случае направление CL1, в котором один сегмент m1 продолжается, разветвляется в двух противоположных направлениях от точки пересечения C2 между одним сегментом m1 и другим сегментом m2. В результате направление CL1 к цели для парковки от точки пересечения C2 почти не отличается от противоположного. Однако настоящий вариант выполнения может легко указывать направление CL1, в котором один сегмент m1 продолжается, так как один конец одного сегмента m1 соединен с другим сегментом m2.
[0044] Когда метка М представляет собой знак, изображенный на поверхности дороги, часть сегментов (m1, m2) исчезает из-за истирания метки М с течением времени. Здесь в качестве сравнительного примера случай, когда метка М включает в себя только один сегмент m1, сравнивается с настоящим вариантом выполнения. В таком случае один конец сегмента m1 заменяет точку пересечения C2 согласно варианту выполнения. Если один конец сегмента m1 исчезает из-за истирания с течением времени, положение одного конца сегмента m1 изменяется. В качестве другого сравнительного примера случай, когда круглая метка вместо другого сегмента m2 соединена с одним концом одного сегмента m1, сравнивается с настоящим вариантом выполнения. В таком случае центр круглой метки заменяет точку пересечения C2 согласно варианту выполнения. Если часть круглой метки исчезает из-за истирания с течением времени, центральное положение круглой метки изменяется. Согласно настоящему варианту выполнения по сравнению с этими сравнительными примерами один конец одного сегмента m1 соединен с другим сегментом m2. Даже когда часть одного сегмента m1 или другого сегмента m2 исчезает из-за истирания с течением времени, точка пересечения C2 между одним сегментом m1 и другим сегментом m2 не так легко изменяется. Соответственно, положение блока 102 катушки передачи энергии (катушки 12 передачи энергии) может быть указано с высокой точностью, так как точка пересечения C2 и направление CL1 не так легко изменяются, даже когда часть метки М исчезает из-за истирания с течением времени.
[0045] Даже при условии, когда распознавание изображения метки М камерой 31 является трудным во время ночи или из-за дождливой погоды, метка М, в которой один конец одного сегмента m1 соединен с другим сегментом m2, превосходит метки сравнительных примеров, описанных выше, в указании «точки (точки пересечения C2)» и «направления (направления CL1, в котором один сегмент m1 продолжается)».
[0046] Один сегмент m1 находится под прямым углом к другому сегменту m2. Таким образом, точка пересечения C2 между одним сегментом m1 и другим сегментом m2 может быть указана легко и точно. Угол, образованный одним сегментом m1 с другим сегментом m2, не так легко искажается при обработке выделения края.
[0047] Прямая линии CL1, простирающаяся и продолжающаяся от одного сегмента m1, проходит через середину C1 катушки 12 передачи энергии. Это облегчает позиционирование катушки 22 приема энергии в середине C1 катушки 12 передачи энергии. Соответственно, транспортное средство 200 может быть припарковано таким образом, чтобы увеличивать эффективность передачи энергии.
[0048] Один сегмент m1 длиннее другого сегмента m2, и один конец одного сегмента m1 соединен со средней точкой другого сегмента m2. Соединительное отношение между одним сегментом m1 и другим сегментом m2 облегчает разграничение между границами S парковки и одним сегментом m1.
[0049] Конец одного сегмента m1, соединенного с другим сегментом m2, расположен ближе к катушке передачи энергии, чем концевые участки границ S парковки. Это облегчает разграничение между одним сегментом m1 и границами S парковки при обработке распознавания метки М.
[0050] Форма метки М в изображении с камеры может изменяться в зависимости от положения транспортного средства 200. В результате точка пересечения C2 и направление CL1, в котором один сегмент m1 продолжается от точки пересечения C2, не могут быть указаны точно при обработке распознавания метки м. Для того, чтобы бороться с этим, точка пересечения C2 между двумя сегментами (m1, m2) и направление CL1, в котором один сегмент m1 продолжается от точки пересечения C2, указываются на основе изображения с преобразованной точкой обзора, получаемого таким образом, чтобы преобразовывать точку обзора изображения с камеры в положение сверху камеры 31. За счет изображения с преобразованной точкой обзора при рассмотрении сверху камеры 31 точка пересечения C2 и направление CL1 могут быть указаны стабильно и точно независимо от положения, в котором изображение с камеры получено.
[0051] Так как метка М обеспечена на стороне, где транспортное средство 200 входит при парковке, транспортное средство 200 может перемещаться по направлению к блоку 102 катушки передачи энергии таким образом, чтобы ссылаться на метку М как на направляющую для блока 102 катушки передачи энергии, даже когда, например, блок 102 катушки передачи энергии не показан на изображении вида с высоты птичьего полета.
[0052] Когда метка М состоит из светящегося тела, такого как светодиод, сам блок 102 катушки передачи энергии трудно распознать визуально во время ночи или дождя, что создает трудности для распознавания цели для парковки. Излучение света метки М согласно настоящему варианту выполнения облегчает указание положения блока 102 катушки передачи энергии.
[0053] Так как площадка для парковки часто вмещает большое количество паркуемых транспортных средств, распознавание цели для парковки обычно бывает сложным, так как блок 102 катушки передачи энергии может быть скрыт другими транспортными средствами, даже при хорошей видимости. Однако согласно настоящему варианту выполнения метка М расположена на стороне, где транспортное средство 200 входит при парковке, на противоположной стороне блока 102 катушки передачи энергии. В связи с этим метка М может быть распознана без скрытия другими транспортными средствами. Соответственно, целевая позиция парковки может быть легко указана с помощью метки М.
[0054] (ПЕРВЫЙ МОДИФИЦИРОВАННЫЙ ПРИМЕР)
Хотя один сегмент m1, показанный на Фиг. 4, соединен с блоком 102 катушки передачи энергии, один сегмент m1 не должен быть соединен с блоком 102 катушки передачи энергии, как показано на Фиг. 10. С меткой М, имеющей форму, показанную на Фиг. 10, точка пересечения C2 и направление CL1, в котором один сегмент m1 продолжается, также могут быть указаны с высокой точностью таким же образом, что и у метки М, показанной на Фиг. 4.
[0055] (ВТОРОЙ МОДИФИЦИРОВАННЫЙ ПРИМЕР)
Хотя один конец одного сегмента m1 соединен со средней точкой другого сегмента m2, один конец одного сегмента m1 может быть соединен с одним концом другого сегмент m2, как показано на Фиг. 11. С меткой М, имеющей форму, показанную на Фиг. 11, точка пересечения C2 между одним сегментом m1 и другим сегментом m2 также может быть указана с высокой точностью таким же образом, что и у метки М, показанной на Фиг. 4.
[0056] (ТРЕТИЙ МОДИФИЦИРОВАННЫЙ ПРИМЕР)
Устройство 100 беспроводной подачи энергии, показанное на Фиг. 2 и Фиг. 4, обеспечено блоком 102 катушки передачи энергии между противооткатными упорами 51. Эта конфигурация пригодна для блока на стороне транспортного средства, в котором катушка 22 приема энергии размещена между задними колесами транспортного средства 200. Устройство 100 беспроводной подачи энергии согласно варианту выполнения также может быть применено в случае блока на стороне транспортного средства, в котором катушка 22 приема энергии размещена на передней стороне задних колес транспортного средства 200. Например, как показано на Фиг. 12, даже когда блок 102 катушки передачи энергии расположен близко к стороне, где транспортное средство 200 входит при парковке в парковочное место, метка М все же может быть размещена ближе к стороне, где транспортное средство 200 входит при парковке, чем блок 102 катушки передачи энергии.
[0057] Хотя настоящее изобретение было описано выше со ссылкой на примеры, настоящее изобретение не ограничивается их описаниями, и для специалиста в области техники будет ясно, что различные модификации и улучшения могут быть выполнены.
[0058] Хотя вариант выполнения, описанный выше, указывает точку пересечения C2 между двумя сегментами (m1, m2) и направление CL1, в котором один сегмент m1 продолжается от точки пересечения C2, на основе изображения с преобразованной точкой обзора, точка пересечения C2 и направление CL1 также могут быть указаны на основе изображения с камеры перед выполнением преобразования точки обзора.
[0059] Хотя вариант выполнения представил случай, когда один сегмент m1 находится под прямым углом к другому сегменту m2, угол, образованный одним сегментом m1 с другим сегментом m2, может быть другими углами, отличными от прямого угла.
[0060] Хотя вариант выполнения представил случай, когда метка М состоит из одного сегмента m1 и другого сегмента m2, метка М может дополнительно включать в себя третий сегмент или метку, имеющую другую форму.
[0061] Настоящий вариант выполнения использует метку М, состоящую из визуально распознаваемого невооруженным глазом объекта, но не ограничивается этим, и метка М может быть визуально не распознаваемым невооруженным глазом объектом, но визуально распознаваемым с помощью изображения с камеры или изображения вида с высоты птичьего полета.
ПРОМЫШЛЕННАЯ ПРИМЕНИМОСТЬ
[0062] Устройство беспроводной подачи энергии и устройство помощи при парковке согласно варианту выполнения настоящего изобретения могут точно указывать положение блока катушки передачи энергии в качестве цели для парковки путем распознавания точки пересечения C2 между двумя сегментами (m1, m2) и направления CL1, в котором один сегмент m1 продолжается от точки пересечения C2. В связи с этим устройство беспроводной подачи энергии и устройство помощи при парковке согласно варианту выполнения настоящего изобретения являются промышленно применимыми.
СПИСОК ССЫЛОЧНЫХ ПОЗИЦИЙ
[0063] 100 Устройство беспроводной подачи энергии
102 Блок катушки передачи энергии
12 Катушка передачи энергии
200 Транспортное средство
22 Катушка приема энергии
25 Контроллер
31 Камера
32 Блок дисплея
41 Блок обработки преобразования точки обзора
42 Блок распознавания метки
43 Блок указания катушки передачи энергии
44 Блок помощи при парковке
C1 Середина катушки передачи энергии
C2 Точка пересечения между одним сегментом и другим сегментом
CL1 Направление, в котором один сегмент продолжается от точки пересечения C2
М Метка
S Граница парковки.
Использование – в области электротехники. Технический результат – повышение точности указания целевой позиции парковки для беспроводной зарядки транспортного средства. Согласно изобретению устройство (100) беспроводной подачи энергии включает в себя метку (М), обеспеченную ближе к стороне, где транспортное средство (200) въезжает на парковку, чем блок (102) катушки передачи энергии, содержащий катушку (12) передачи энергии. Метка (М) включает в себя по меньшей мере два сегмента (m1, m2), не параллельных друг другу, и концевой участок одного сегмента (m1) соединен с другим сегментом (m2). Катушка (12) передачи энергии отделена на заданное расстояние от точки пересечения (C2) двух сегментов в направлении (CL1), в котором один сегмент (m1) продолжается. 2 н. и 5 з.п. ф-лы, 12 ил.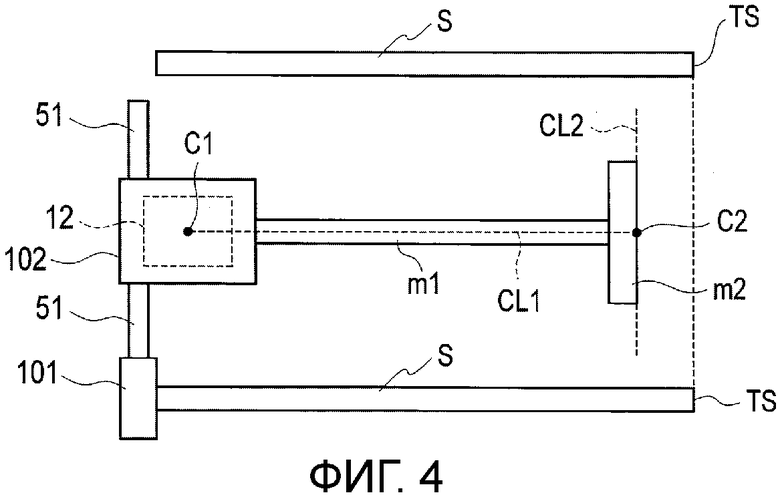
1. Устройство (100) беспроводной подачи энергии, обеспеченное на земле, причем упомянутое устройство содержит:
катушку (12) передачи энергии для передачи электрической энергии на катушку (22) приема энергии, обеспеченную в транспортном средстве (200), через беспроводное соединение;
блок (102) катушки передачи энергии, вмещающий катушку (12) передачи энергии; и
метку (М), обеспеченную ближе к стороне, где транспортное средство (200) входит при парковке, чем блок (102) катушки передачи энергии,
причем метка (М) включает в себя по меньшей мере два сегмента (m1, m2), не параллельных друг другу и имеющих конфигурацию, в которой концевой участок одного сегмента (m1) соединен с другим сегментом (m2),
причем катушка (12) передачи энергии отделена на заданное расстояние от точки (С2) пересечения двух сегментов (m1, m2) в направлении, в котором один сегмент (m1) продолжается.
2. Устройство беспроводной подачи энергии по п. 1, в котором один сегмент (m1) находится под прямым углом к другому сегменту (m2).
3. Устройство беспроводной подачи энергии по п. 1 или 2, в котором прямая линия, простирающаяся и продолжающаяся от одного сегмента (m1), проходит через середину (С1) катушки (12) передачи энергии.
4. Устройство беспроводной подачи энергии по п. 2, в котором один сегмент (m1) длиннее другого сегмента (m2), и концевой участок одного сегмента (m1) соединен со средней точкой (С2) другого сегмента (m2).
5. Устройство беспроводной подачи энергии по любому из пп. 1, 2 и 4, в котором концевой участок одного сегмента (m1), соединенный с другим сегментом (m2), расположен ближе к катушке (12) передачи энергии, чем концевой участок границы (S) парковки.
6. Устройство помощи при парковке, используемое при передаче электрической энергии от катушки (12) передачи энергии, обеспеченной на земле, на катушку (22) приема энергии, обеспеченную в транспортном средстве (200), через беспроводное соединение,
в котором метка (М) обеспечена ближе к стороне, где транспортное средство входит при парковке, чем катушка (12) передачи энергии, причем метка (М) включает в себя по меньшей мере два сегмента (m1, m2), не параллельных друг другу и имеющих конфигурацию, в которой концевой участок одного сегмента (m1) соединен с другим сегментом (m2),
причем упомянутое устройство помощи при парковке содержит:
камеру (31) для получения изображения метки (М) для получения изображения с камеры;
блок (42) распознавания метки, выполненный с возможностью указания точки (С2) пересечения двух сегментов (m1, m2) и направления, в котором один сегмент (m1) продолжается от точки (С2) пересечения, на основе изображения с камеры; и
блок (43) указания катушки передачи энергии, выполненный с возможностью указания положения катушки (12) передачи энергии, отделенной на заданное расстояние от точки (С2) пересечения в направлении, в котором один сегмент (m1) продолжается.
7. Устройство помощи при парковке по п. 6, дополнительно содержащее блок (41) обработки преобразования точки обзора, выполненный с возможностью преобразования точки обзора изображения с камеры в положение выше камеры для создания изображения с преобразованной точкой обзора,
в котором блок (42) распознавания метки указывает точку (С2) пересечения двух сегментов (m1, m2) и направление, в котором один сегмент (m1) продолжается от точки пересечения, на основе изображения с преобразованной точкой обзора, создаваемого блоком (41) обработки преобразования точки обзора.
| JP 2011015549 A, 20.01.2011 | |||
| БЕСКОНТАКТНОЕ УСТРОЙСТВО ПРИЕМА ЭНЕРГИИ И ТРАНСПОРТНОЕ СРЕДСТВО С НИМ | 2009 |
|
RU2488495C1 |
| СПОСОБ ПОЛУЧЕНИЯ РАДИАЦИОННО-ЗАЩИТНОГО ЖАРОСТОЙКОГО КОМПОЗИЦИОННОГО МАТЕРИАЛА | 2000 |
|
RU2202132C2 |
| МОДУЛЯТОРЫ ТРАНСПОРТЕРОВ АТФ-СВЯЗЫВАЮЩЕЙ КАССЕТЫ | 2005 |
|
RU2556984C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ДИСПЛЕЯ ПАРКОВОЧНОГО УСТРОЙСТВА И СПОСОБ ОТОБРАЖЕНИЯ | 2008 |
|
RU2468944C2 |

