Область техники, к которой относится изобретение
[0001]
Настоящее изобретение относится к устройству и способу содействия парковке для представления информации для парковки транспортного средства водителю.
Уровень техники
[0002]
Устройство, описанное в патентной литературе 1, приведенной ниже по тексту, известно как устройство содействия парковке, выполненное с возможностью представлять информацию для парковки транспортного средства водителю.
[0003]
Патентная литература 1 указывает, что при выполнении содействия парковке, устройство содействия парковке отображает прогнозированный путь края транспортного средства в изображении вида сверху, включающем в себя транспортное средство. Устройство содействия парковке тем самым дает возможность водителю легко проверять вероятность того, что транспортное средство может входить в контакт с препятствием при движении назад вследствие разности в радиусе поворота между внешними колесами.
Список цитат
Патентная литература
[0004]
Патентная литература 1. Публикация заявки на патент (Япония) № 2004-252837.
Сущность изобретения
Техническая проблема
[0005]
Устройство содействия парковке, описанное выше по тексту, тем не менее, просто отображает прогнозированный путь края транспортного средства и имеет проблему неспособности выполнения любого содействия парковке, когда прогнозированный путь края транспортного средства находится в контакте с препятствием.
[0006]
Настоящее изобретение осуществлено с учетом обстоятельств, описанных выше по тексту, и имеет цель выполнения содействия парковке даже в ситуации, если прогнозируется, что край транспортного средства входит в контакт с препятствием.
Решение проблемы
[0007]
Настоящее изобретение устанавливает конечное целевое положение парковки в доступном пространстве парковки и определяет то, существует или нет первый путь для достижения транспортным средством конечного целевого положения парковки без вхождения в контакт с крайним участком доступного пространства парковки. Когда выполняется определение, что первый путь существует, отображается первый путь.
[0008]
С другой стороны, когда выполняется определение, что первый путь не существует, настоящее изобретение вычисляет: угол въезда, предоставляющий возможность транспортному средству въезжать в доступное пространство парковки без вхождения в контакт с крайним участком доступного пространства парковки; и неконечное целевое положение парковки, которое является положением, которое должно быть достигнуто, когда транспортное средство въезжает в доступное пространство парковки посредством использования угла въезда. Затем, настоящее изобретение вычисляет второй путь для достижения транспортным средством неконечного целевого положения парковки и третий путь для достижения транспортным средством конечного целевого положения парковки из неконечного целевого положения парковки и отображает второй путь и третий путь.
Эффекты изобретения
[0009]
Согласно настоящему изобретению, поскольку угол въезда транспортного средства относительно доступного пространства парковки и неконечное целевое положение парковки устанавливаются в случае, если определяется то, что крайний участок транспортного средства будет входить в контакт с крайним участком доступного пространства парковки, когда транспортное средство движется для парковки в конечном целевом положении парковки. Соответственно, содействие парковке может предоставляться даже в ситуации, если прогнозируется, что крайний участок транспортного средства входит в контакт с препятствием.
Краткое описание чертежей
[0010]
[Фиг. 1] Фиг. 1 является блок-схемой, показывающей конфигурацию системы содействия парковке, показанной как вариант осуществления настоящего изобретения.
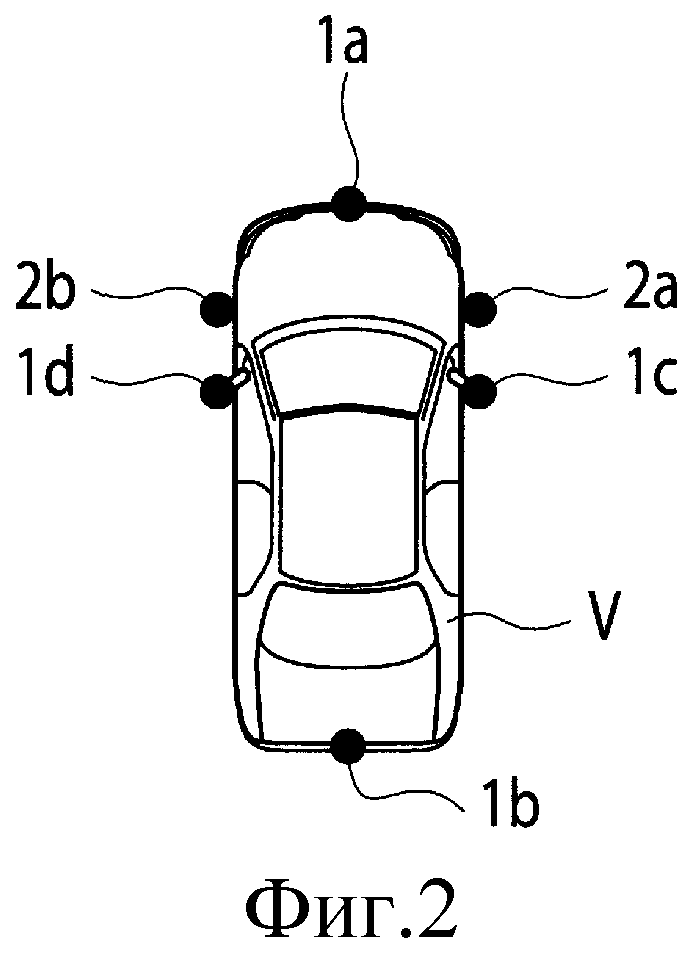
[Фиг. 2] Фиг. 2 является видом сверху, показывающим положения установленных на транспортном средстве камер и ультразвуковых сонаров, которые устанавливаются в транспортном средстве в системе содействия парковке, показанной как вариант осуществления настоящего изобретения.
[Фиг. 3] Фиг. 3 является видом изображения, показывающим пример изображения вида сверху, отображаемого на устройстве отображения в системе содействия парковке, показанной как вариант осуществления настоящего изобретения.
[Фиг. 4] Фиг. 4 является видом сверху, показывающим ситуацию, когда доступное пространство парковки и конечное целевое положение парковки устанавливаются в системе содействия парковке, показанной как вариант осуществления настоящего изобретения.
[Фиг. 5] Фиг. 5 является видом сверху, иллюстрирующим диапазоны, отображаемые на устройстве отображения в системе содействия парковке, показанной как вариант осуществления настоящего изобретения.
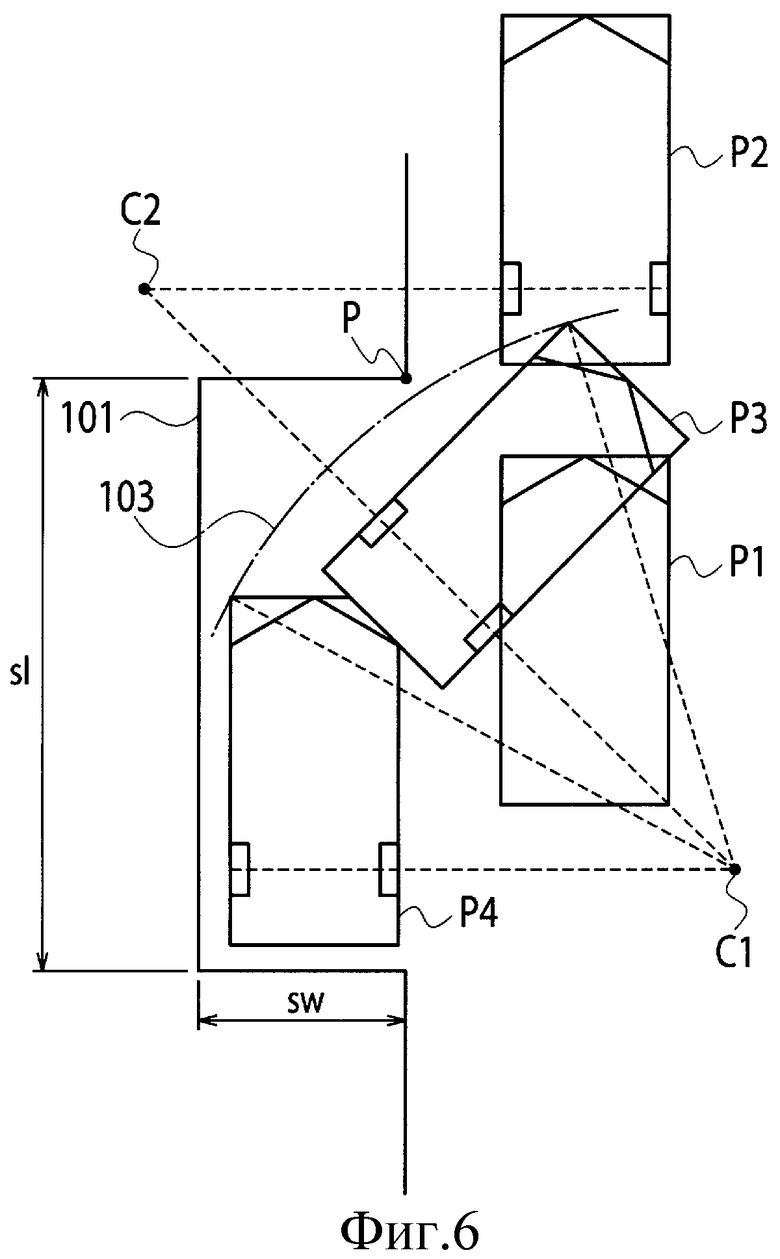
[Фиг. 6] Фиг. 6 является видом сверху, показывающим ситуацию, когда транспортное средство не входит в контакт с передней крайней точкой доступного пространства парковки в системе содействия парковке, показанной как вариант осуществления настоящего изобретения.
[Фиг. 7] Фиг. 7 является видом сверху, показывающим ситуацию, когда транспортное средство входит в контакт с передней крайней точкой доступного пространства парковки в системе содействия парковке, показанной как вариант осуществления настоящего изобретения.
[Фиг. 8] Фиг. 8 является блок-схемой последовательности операций процедур обработки для содействия парковке, в которых система содействия парковке, показанная как вариант осуществления настоящего изобретения, вычисляет путь посредством установки угла въезда и неконечного целевого положения парковки.
[Фиг. 9] Фиг. 9 является видом сверху, иллюстрирующим обработку для определения неконечного целевого положения парковки и угла θ1 въезда в системе содействия парковке, показанной как вариант осуществления настоящего изобретения.
[Фиг. 10] Фиг. 10 является видом сверху, иллюстрирующим обработку для определения неконечного целевого положения парковки и угла θ2 въезда в системе содействия парковке, показанной как вариант осуществления настоящего изобретения.
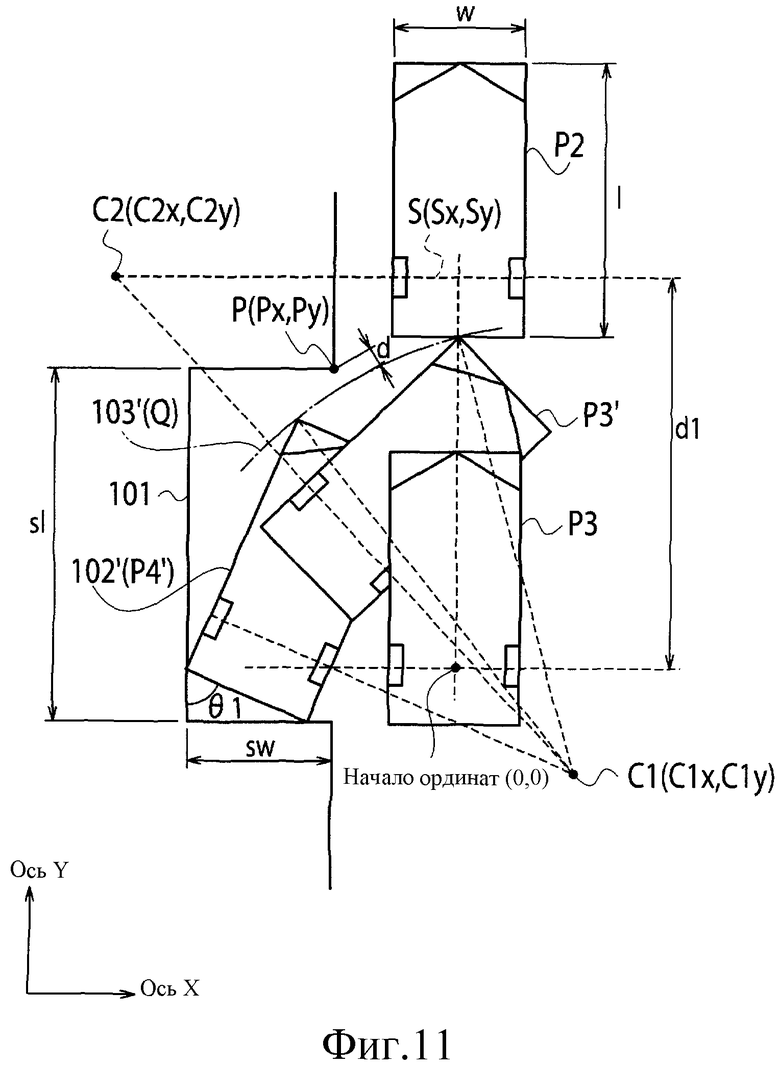
[Фиг. 11] Фиг. 11 является видом сверху, иллюстрирующим обработку для определения расстояния до начального положения для движения задним ходом в системе содействия парковке, показанной как вариант осуществления настоящего изобретения.
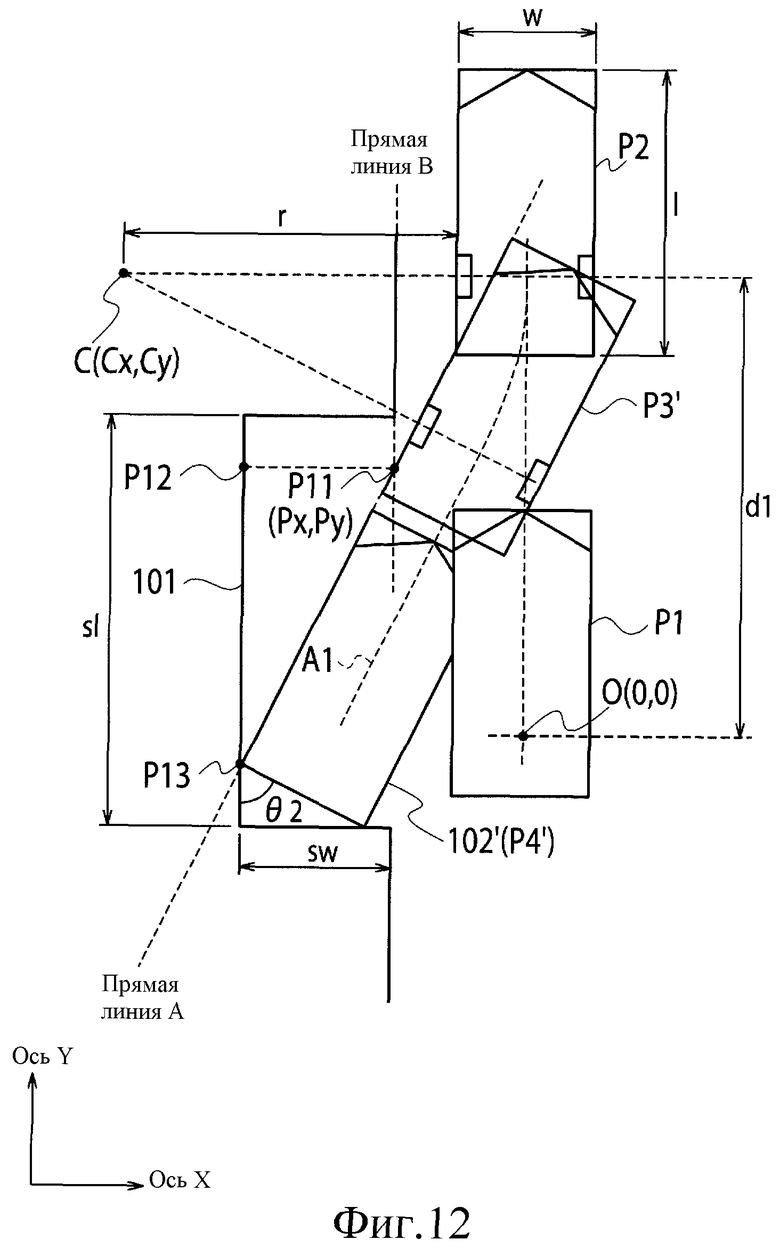
[Фиг. 12] Фиг. 12 является другим видом сверху, иллюстрирующим обработку для определения расстояния до начального положения для движения задним ходом в системе содействия парковке, показанной как вариант осуществления настоящего изобретения.
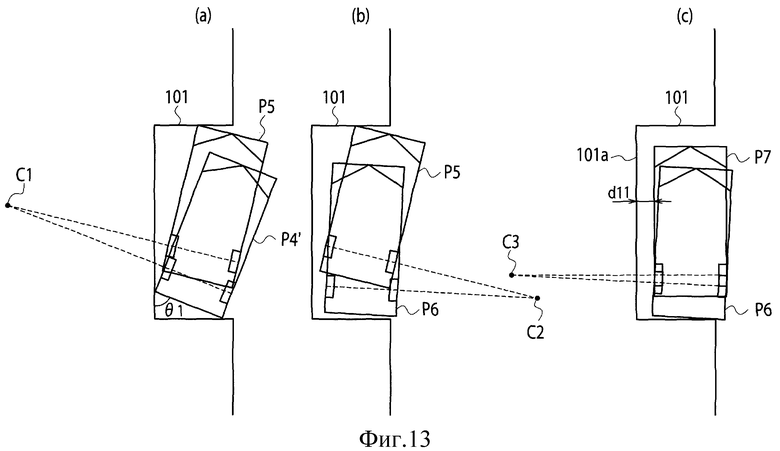
[Фиг. 13] Фиг. 13 является видом сверху, показывающим то, как система содействия парковке, показанная как вариант осуществления настоящего изобретения, заставляет продольное направление транспортного средства становиться параллельным продольному направлению доступного пространства парковки. В частности, фиг. 13(a) показывает состояние, в котором транспортное средство движется вперед посредством поворота из положения завершения параллельной парковки, фиг. 13(b) показывает состояние, в котором транспортное средство движется задним ходом посредством поворота из положения P5, и фиг. 13(c) показывает состояние, в котором транспортное средство движется вперед посредством поворота из положения P6.
[Фиг. 14] Фиг. 14 является еще одним другим видом сверху, показывающим то, как система содействия парковке, показанная как вариант осуществления настоящего изобретения, заставляет продольное направление транспортного средства становиться параллельным продольному направлению доступного пространства парковки. В частности, фиг. 14(a) показывает состояние, в котором транспортное средство движется вперед посредством поворота из положения завершения параллельной парковки, и фиг. 14(b) показывает состояние, в котором транспортное средство движется задним ходом прямо из положения P5.
[Фиг. 15] Фиг. 15 является другим видом сверху, показывающим то, как система содействия парковке, показанная как вариант осуществления настоящего изобретения, заставляет продольное направление транспортного средства становиться параллельным продольному направлению доступного пространства парковки. В частности, фиг. 15(a) показывает состояние, в котором транспортное средство движется вперед посредством поворота из положения P6, фиг. 15(b) показывает состояние, в котором транспортное средство движется задним ходом прямо из положения P7, и фиг. 15(c) показывает состояние, в котором транспортное средство движется вперед посредством поворота из положения P8.
Подробное описание вариантов осуществления
[0011]
Вариант осуществления настоящего изобретения описывается ниже по тексту со ссылкой на чертежи.
[0012]
Конфигурация системы содействия парковке
Фиг. 1 является схемой конфигурации, показывающей конфигурацию системы содействия парковке, к которой применяется настоящее изобретение. Данная система содействия парковке выполнена с возможностью вычислять путь для направления транспортного средства в целевое положение парковки и автоматически управлять рулевым управлением транспортного средства таким образом, что транспортное средство может двигаться вдоль пути.
[0013]
Система содействия парковке выполнена так, что контроллер 10 содействия парковке подключается к: четырем установленным на транспортном средстве камерам 1a-1d, выполненным с возможностью снимать изображения окрестностей транспортного средства; спаренным левому и правому ультразвуковым сонарам 2a, 2b, выполненным с возможностью измерять положения объектов на левой и правой сторонах транспортного средства; устройству 3 отображения, выполненному с возможностью отображать изображение вида сверху транспортного средства и его окрестностей; актуатору 4 рулевого управления, выполненному с возможностью приводить в действие рулевое управление транспортного средства; устройству 5 ввода операции, выполненному с возможностью принимать ввод операции от водителя; датчику 6 угла поворота, выполненному с возможностью регистрировать угол поворота транспортного средства; и датчику 7 скорости транспортного средства, выполненному с возможностью регистрировать скорость транспортного средства.
[0014]
Следует отметить, что хотя отображение посредством устройства 3 отображения и приведение в действие рулевого управления посредством актуатора 4 рулевого управления используются в качестве примера представления такой информации содействия парковке, как путь и положение парковки транспортного средства V в настоящем варианте осуществления, способ представления не ограничивается этим. Информация содействия вождению может быть представлена посредством аудио.
[0015]
Каждая из установленных на транспортном средстве камер 1a-1d формируется, например, из камеры CCD (устройства с зарядовой связью) или камеры CMOS (комплементарной структуры "металл-оксид-полупроводник"), имеющей широкий угол формирования изображений приблизительно в 180°. Эти четыре установленных на транспортном средстве камеры 1a-1d устанавливаются на транспортном средстве V в надлежащих местоположениях, с тем чтобы иметь возможность снимать изображения всех зон, окружающих транспортное средство.
[0016]
В частности, как показано на фиг. 2, например, установленная на транспортном средстве камера 1a, установленная на транспортном средстве камера 1b, установленная на транспортном средстве камера 1c и установленная на транспортном средстве камера 1d присоединены к передней решетке, задней накладке, правому дверному зеркалу и левому дверному зеркалу транспортного средства V соответственно. Каждая из установленных на транспортном средстве камер 1a-1d снимает изображение зоны в своем предварительно определенном диапазоне, окружающем транспортное средство в направлении, обращенном наклонно вниз к поверхности дороги.
[0017]
Каждый из ультразвуковых сонаров 2a, 2b выполнен с возможностью передавать ультразвуковые волны и принимать отраженные волны, которые возвращаются после отражения от объекта. Каждый из ультразвуковых сонаров 2a, 2b преобразует время от передачи ультразвуковых волн до их приема в расстояние, чтобы тем самым измерять расстояние до объекта. Как показано на фиг. 2, ультразвуковые сонары 2a, 2b присоединены к правой боковой части и левой боковой части транспортного средства V соответственно. Ультразвуковые сонары 2a, 2b устанавливаются таким образом, что их направление регистрации может быть, по существу, перпендикулярным направлению движения транспортного средства V.
[0018]
Каждый из этих ультразвуковых сонаров 2a, 2b используется в качестве средства регистрации препятствия для измерения положения препятствия, такого как другое транспортное средство, припаркованное около целевого положения парковки транспортного средства V. Следует отметить, что любое устройство может быть использовано в качестве средства регистрации препятствия при условии, что оно допускает измерение положения препятствия. Например, может быть использовано другое устройство, такое как лазерный радар или милливолновый радар, к примеру, вместо ультразвуковых сонаров 2a, 2b.
[0019]
Устройство 3 отображения является устройством отображения, таким как жидкокристаллическое устройство отображения, установленное в салоне транспортного средства. Устройство 3 отображения отображает изображения вида сверху окрестностей транспортного средства и различные части информации содействия парковке, сгенерированной посредством контроллера 10 содействия парковке.
[0020]
Работа актуатора 4 рулевого управления управляется посредством контроллера 10 содействия парковке. В соответствии с управлением посредством контроллера 10 содействия парковке, актуатор 4 рулевого управления приводит в действие рулевое управление транспортного средства V. Например, приводной мотор рулевого управления системы рулевого управления с электрическим усилителем, выполненной с возможностью электрически содействовать операциям рулевого управления водителя транспортного средства, используется в качестве актуатора 4 рулевого управления.
[0021]
Устройство 5 ввода операции принимает различные операционные вводы, осуществляемые водителем транспортного средства V. Устройство 5 ввода операции сформировано, например, из клавиши направления или панели касания. Когда водитель вводит операцию, устройство 5 ввода операции вводит сигнал операции согласно введенной операции в контроллер 10 содействия парковке.
[0022]
Датчик 6 угла поворота вводит информацию относительно угла поворота транспортного средства V в контроллер 10 содействия парковке по мере необходимости.
[0023]
Датчик 7 скорости транспортного средства вводит информацию относительно скорости транспортного средства V в контроллер 10 содействия парковке по мере необходимости.
[0024]
Контроллер 10 содействия парковке сконфигурирован так, что включает в себя, например, микрокомпьютер, который работает согласно предварительно определенной программе обработки. Контроллер 10 содействия парковке реализует различные функции для содействия парковке посредством программы обработки, выполняемой в CPU микрокомпьютера.
[0025]
В частности, контроллер 10 содействия парковке принимает изображения, снятые посредством четырех установленных на транспортном средстве камер 1a-1d, преобразует точки обзора этих изображений, чтобы получать изображения, каждое из которых наблюдается из виртуальной точки обзора сверху транспортного средства, в соответствии с предварительно определенным алгоритмом преобразования координат и объединяет изображения вместе. Контроллер 10 содействия парковке тем самым генерирует изображение вида сверху, в котором окрестности транспортного средства видны из точки сверху транспортного средства, и отображает сгенерированное изображение вида сверху окрестностей транспортного средства на устройстве 3 отображения.
[0026]
Фиг. 3 показывает пример изображения вида сверху окрестностей транспортного средства, отображаемого на устройстве 3 отображения. В этом примере изображения область A1 представляет изображение, полученное посредством преобразования точки обзора изображения, снятого посредством установленной на транспортном средстве камеры 1a, присоединенной к передней решетке. Область A2 представляет изображение, полученное посредством преобразования точки обзора изображения, снятого посредством установленной на транспортном средстве камеры 1b, присоединенной к задней накладке. Область A3 представляет изображение, полученное посредством преобразования точки обзора изображения, снятого посредством установленной на транспортном средстве камеры 1c, присоединенной к правому дверному зеркалу. Область A4 представляет изображение, полученное посредством преобразования точки обзора изображения, снятого посредством установленной на транспортном средстве камеры 1d, присоединенной к левому дверному зеркалу.
[0027]
Следует отметить, что метка положения транспортного средства, указывающая положение транспортного средства, находится в центре изображения вида сверху и накладывается на него в качестве компьютерного графического изображения. Как показано посредством примера изображения по фиг. 3, изображение вида сверху, отображаемое на устройстве 3 отображения, является изображением, с помощью которого водитель может проверять ситуацию в окрестностях на 360° транспортного средства с транспортным средством в центре, как если смотришь вниз сверху транспортного средства.
[0028]
Контроллер 10 содействия парковке выполняет установки доступного пространства парковки, конечного целевого положения парковки и т.п. для парковки транспортного средства V. С использованием информации относительно препятствий, таких как другие транспортные средства, зарегистрированные посредством ультразвуковых сонаров 2a, 2b, контроллер 10 содействия парковке устанавливает зону, не имеющую препятствий, в качестве доступного пространства парковки и устанавливает конечное целевое положение парковки в доступном пространстве парковки. В качестве альтернативы, контроллер 10 содействия парковке может распознавать положения полос дорожной разметки или препятствий на основе изображений, снятых посредством установленных на транспортном средстве камер 1a-1d, устанавливать зону, не имеющую препятствий, в качестве доступного пространства парковки и устанавливать конечное целевое положение парковки в этом доступном пространстве парковки.
[0029]
Рассмотрим случай, в котором, как показано на фиг. 4, транспортное средство V движется прямо и параллельно паркуется в доступном пространстве 101 парковки слева. Когда транспортное средство V движется параллельно с другими параллельно припаркованными транспортными средствами V1, V2, ультразвуковой сонар 2b может регистрировать передний край другого транспортного средства V2 и задний край другого транспортного средства V1. Тем самым контроллер 10 содействия парковке идентифицирует доступное пространство парковки между передним краем другого транспортного средства V2 и задним краем другого транспортного средства V1. Например, как показано на фиг. 4, доступное пространство 101 парковки распознается посредством контроллера 10 содействия парковке в качестве информации положения, указывающей форму, покрывающую заднюю угловую часть другого транспортного средства V1, и информации положения, указывающей форму, покрывающую переднюю угловую часть другого транспортного средства V2.
[0030]
После распознавания доступного пространства 101 парковки контроллер 10 содействия парковке устанавливает конечное целевое положение 102 парковки в доступном пространстве 101 парковки. Контроллер 10 содействия парковке устанавливает зону, отстоящую от доступного пространства 101 парковки на некоторое расстояние d, в качестве конечного целевого положения 102 парковки. Например, контроллер 10 содействия парковке устанавливает положение, отстоящее от передней угловой части другого транспортного средства V2 на некоторое расстояние d, в качестве конечного целевого положения 102 парковки. В дополнение, контроллер 10 содействия парковке устанавливает конечное целевое положение 102 парковки таким образом, что его зона может соответствовать размеру транспортного средства V.
[0031]
Приводится описание установки конечного целевого положения 102 парковки посредством контроллера 10 содействия парковке в ответ на операцию водителя. Фиг. 5 является принципиальной схемой, показывающей сцену, в которой транспортное средство V должно быть параллельно припарковано. Здесь, рассмотрим случай, в котором конечное целевое положение 102 парковки устанавливается в доступном пространстве 101 парковки, свободном между другим транспортным средством V1 и другим транспортным средством V2, и транспортное средство V паркуется в этом конечном целевом положении 102 парковки посредством движения задним ходом.
[0032]
В этом случае изображения, снятые посредством четырех установленных на транспортном средстве камер 1a-1d, присоединяемых к транспортному средству V, подвергаются трансформации точки обзора и комбинируются вместе. Изображение вида сверху тем самым генерируется и отображается на устройстве 3 отображения. Например, когда водитель транспортного средства V осуществляет ввод операции, чтобы указывать, в качестве конечного целевого положения 102 парковки, любое положение в изображении вида сверху, отображаемом на устройстве 3 отображения, с использованием устройства 5 ввода операции, контроллер 10 содействия парковке может выполнять обработку для установки указанного положения в качестве конечного целевого положения 102 парковки транспортного средства V. В этом случае контроллер 10 содействия парковке отображает с возможностью перемещения фигуру рамки (конечное целевое положение 102 парковки), имеющую размер, соответствующий размеру транспортного средства V, в изображении вида сверху, отображаемом на устройстве 3 отображения. Затем, водитель транспортного средства V перемещает конечное целевое положение 102 парковки в желаемое положение в изображении вида сверху с использованием устройства 5 ввода операции. Таким образом, целевое конечное положение 102 парковки может быть установлено в любом положении, намеченном водителем. Удобство использования повышается, когда конечное целевое положение 102 парковки транспортного средства V может быть установлено посредством операций в изображении вида сверху вышеуказанным способом.
[0033]
Контроллер 10 содействия парковке вычисляет путь для параллельной парковки транспортного средства V в конечном целевом положении 102 парковки. В частности, на основе позиционной зависимости между установленным конечным целевым положением 102 парковки и положением остановки транспортного средства, контроллер 10 содействия парковке вычисляет путь для достижения транспортным средством V конечного целевого положения 102 парковки при объезде препятствий, присутствующих впереди и сзади доступного пространства 101 парковки.
[0034]
На основе пути, вычисленного таким образом, контроллер 10 содействия парковке предоставляет содействие парковке, так что транспортное средство V может быть параллельно припарковано вдоль пути. Например, посредством отображения пути для параллельной парковки на устройстве 3 отображения, контроллер 10 содействия парковке может предоставлять содействие парковке, при котором путь для параллельной парковки представляется водителю. Помимо этого, контроллер 10 содействия парковке может выполнять содействие парковке посредством предоставления аудиоруководства относительно направлений рулевого управления и углов поворота. Дополнительно, контроллер 10 содействия парковке может предоставлять содействие парковке посредством управления актуатором 4 рулевого управления, так что транспортное средство V может двигаться вдоль пути.
[0035]
Например, при автоматическом управлении рулевым управлением транспортного средства V так, что транспортное средство V может двигаться вдоль пути, контроллер 10 содействия парковке вычисляет, по мере необходимости, целевой угол поворота для движения транспортного средства V вдоль вычисленного пути при расчете положения и ориентации транспортного средства V посредством контроля значений регистрации, данных датчиком 6 угла поворота и датчиком 7 скорости транспортного средства по мере необходимости. Затем, контроллер 10 содействия парковке автоматически управляет рулевым управлением транспортного средства V посредством управления операцией актуатора 4 рулевого управления таким образом, чтобы обнулять отклонение между целевым углом поворота и фактическим углом поворота, зарегистрированным датчиком 6 угла поворота.
[0036]
Далее описываются операции системы содействия парковке настоящего варианта осуществления, выполненного так, как описано выше по тексту, с рассмотрением конкретной сцены парковки. Фиг. 6 и 7 являются принципиальными схемами, показывающими сцену, в которой транспортное средство V параллельно паркуется в конечном целевом положении 102 парковки.
[0037]
Как показано на фиг. 6, транспортное средство V начинает параллельную парковку посредством движения вперед из исходного положения P1, обращенного к доступному пространству 101 парковки. Во-первых, транспортное средство V движется вперед в начальное положение P2 для движения задним ходом. После этого транспортное средство V движется задним ходом с рулем, фиксированным при предварительно определенном угле поворота руля, поворачивая вокруг центра C2 поворота при движении задним ходом, чтобы достигать положения P3 возврата. Этот предварительно определенный угол поворота руля является углом поворота руля, который дает возможность движения транспортного средства V задним ходом из начального положения P2 для движения задним ходом, так что крайний участок транспортного средства V может достигать пути 103 края транспортного средства на фиг. 6.
[0038]
Затем, транспортное средство V поворачивает вокруг центра C1 поворота при движении задним ходом с рулем, фиксированным при предварительно определенном угле поворота руля, что выполняется посредством поворота руля в направлении, противоположном (т.е. возврат руля) углу поворота руля при движении транспортного средства V задним ходом, из начального положения P2 для движения задним ходом в положение P3 возврата. Таким образом, транспортное средство V может достигать положения P4 завершения параллельной парковки, которое совпадает с конечным целевым положением 102 парковки. Этот предварительно определенный угол поворота руля указывает некоторый угол поворота руля и, в этом примере, дает возможность движения транспортного средства V задним ходом вокруг центра C1 поворота при движении задним ходом так, что крайний участок транспортного средства V может приводиться в контакт с путем 103 края транспортного средства. Посредством выполнения содействия парковке в соответствии с процедурой движения таким образом, контроллер 10 содействия парковке может направлять транспортное средство V в конечное целевое положение 102 парковки без потери пространства.
[0039]
Содействие парковке может предоставляться в процедурах движения, показанных на фиг. 6, когда продольная длина sl доступного пространства 101 парковки является настолько большой, что путь 103 края транспортного средства из положения P3 возврата в конечное целевое положение 102 парковки не находится в контакте с передней крайней точкой P доступного пространства 101 парковки, как показано на фиг. 6. Как показано на фиг. 4 и 5, передняя конечная точка P доступного пространства 101 парковки равна правой задней крайней точке другого транспортного средства V1, припаркованного перед конечным целевым положением 102 парковки, из частей позиционной информации, указывающих доступное пространство 101 парковки. На фиг. 6, путь 103 края транспортного средства является траекторией (первым путем) левого переднего крайнего участка транспортного средства V, движущегося назад из положения P3 возврата в конечное целевое положение 102 парковки. Другими словами, путь 103 края транспортного средства указывает путь движения (первый путь) части транспортного средства V, которая в большей степени приближается к передней крайней точке P, чем какие-либо другие крайние участки транспортного средства V.
[0040]
Тем не менее, как показано на фиг. 7, когда продольная длина sl доступного пространства 101 парковки является небольшой, передняя конечная точка P находится ближе к центру C1 поворота при движении задним ходом, чем путь 103 края транспортного средства из положения P3 возврата в конечное целевое положение 102 парковки. По этой причине, если транспортное средство V движется вдоль пути 103 края транспортного средства, левый передний крайний участок транспортного средства V входит в контакт с другим транспортным средством V1, припаркованным впереди доступного пространства 101 парковки.
[0041]
Чтобы не допускать этого, когда прогнозируется, что транспортное средство V должно входить в контакт с другим транспортным средством V1, система содействия парковке устанавливает угол въезда относительно доступного пространства 101 парковки и неконечное целевое положение парковки, которое отличается от конечного целевого положения 102 парковки, таким образом, что транспортное средство V может двигаться в направлении конечного целевого положения 102 парковки с крайним участком транспортного средства V, отстоящим от крайнего участка доступного пространства 101 парковки. Таким образом, контроллер 10 содействия парковке вычисляет путь (второй путь) для транспортного средства V, которое должно быть припарковано в неконечном целевом положении парковки без контакта между крайним участком транспортного средства V и передней крайней точкой P доступного пространства 101 парковки. Это неконечное целевое положение парковки устанавливается посредством модификации или отклонения конечного целевого положения 102 парковки.
[0042]
Обработка содействия парковке посредством системы содействия парковке
Система содействия парковке, к которой, как описано выше по тексту, применяется настоящее изобретение, выполняет обработку содействия парковке в соответствии с процедурами обработки, показанными на фиг. 8.
[0043]
Во-первых, на этапе S1, в системе содействия парковке, контроллер 10 содействия парковке устанавливает доступное пространство 101 парковки и конечное целевое положение 102 парковки.
[0044]
Затем, на этапе S2 контроллер 10 содействия парковке определяет то, должен или нет крайний участок транспортного средства V входить в контакт с крайним участком доступного пространства 101 парковки, когда транспортное средство V движется так, что оно должно быть припарковано в конечном целевом положении 102 парковки, установленном на этапе 1.
[0045]
В этом процессе контроллер 10 содействия парковке определяет то, должен или нет крайний участок транспортного средства V входить в контакт с передней крайней точкой P доступного пространства 101 парковки, когда транспортное средство V поворачивает из конечного целевого положения 102 парковки вокруг центра C1 поворота при движении задним ходом, как показано на фиг. 6 и 7. Другими словами, контроллер 10 содействия парковке определяет то, существует или нет первый путь для достижения транспортным средством V конечного целевого положения 102 парковки без вхождения в контакт с крайним участком доступного пространства 101 парковки. При этом определении, на основе положения конечного целевого положения 102 парковки и радиуса поворота транспортного средства V, контроллер 10 содействия парковке вычисляет путь 103 края транспортного средства для поворота транспортного средства V из конечного целевого положения 102 парковки вокруг центра C1 поворота при движении задним ходом. Контроллер 10 содействия парковке определяет то, что крайний участок транспортного средства V входит в контакт с передней крайней точкой P доступного пространства 101 парковки, когда передняя крайняя точка P доступного пространства 101 парковки находится ближе к центру C1 поворота при движении задним ходом, чем путь 103 края транспортного средства.
[0046]
При определении, что транспортное средство V не будет входить в контакт с передней крайней точкой P доступного пространства 101 парковки, контроллер 10 содействия парковке определяет то, что нет необходимости выполнять возврат снова после достижения конечного целевого положения 102 парковки, и переходит к этапу S3. С другой стороны, при определении, что транспортное средство V будет входить в контакт с передней крайней точкой P доступного пространства 101 парковки, контроллер 10 содействия парковке определяет то, что необходимо выполнить возврат снова после достижения конечного целевого положения 102 парковки, и переходит к этапу S5.
[0047]
При параллельной парковке, первый возврат выполняется, когда транспортное средство V начинает движение из положения P3 возврата в положение P4 завершения параллельной парковки. Повторный возврат на этапе S2 является возвратом для направления транспортного средства V, которое направлено в неконечное целевое положение парковки, установленное посредством изменения угла целевого положения 102 парковки, таким образом, что оно становится параллельно доступному пространству 101 парковки.
[0048]
На этапе S3 контроллер 10 содействия парковке вычисляет первый путь из исходного положения P1 в начальное положение P2 для движения задним ходом, затем из начального положения P2 для движения задним ходом в положение P3 возврата и затем из положения P3 возврата в положение P4 завершения параллельной парковки, как показано на фиг. 6. При этом вычислении контроллер 10 содействия парковке вычисляет первый путь из положения P3 возврата в положение P4 завершения параллельной парковки посредством получения положения P3 возврата, которое является положением, в которое транспортное средство V поворачивает из положения P4 завершения параллельной парковки вокруг центра C1 поворота при движении задним ходом. Контроллер 10 содействия парковке затем вычисляет путь из начального положения P2 для движения задним ходом в положение P3 возврата посредством получения начального положения P2 для движения задним ходом, которое является положением, в которое транспортное средство V поворачивает из положения P3 возврата вокруг центра C2 поворота при движении задним ходом. Контроллер 10 содействия парковке затем вычисляет путь из начального положения P2 для движения задним ходом в исходное положение P1, аналогично пути из исходного положения P1 в начальное положение P2 для движения задним ходом.
[0049]
На этапе 5, контроллер 10 содействия парковке вычисляет оптимальный угол конечного целевого положения 102 парковки относительно доступного пространства 101 парковки, причем этот угол дает возможность транспортному средству V двигаться в направлении конечного целевого положения 102 парковки, в то же время находясь на расстоянии от крайнего участка доступного пространства 101 парковки. Затем, на этапе S6 контроллер 10 содействия парковке вычисляет второй путь в неконечное целевое положение 102' парковки, установленное с использованием угла въезда, установленного на этапе S5. Обработка на каждом из этапа 5 и этапа 6 описывается ниже по тексту.
[0050]
На этапе S4, контроллер 10 содействия парковке отображает первый путь, вычисленный на этапе S3, или второй путь, вычисленный на этапе 6, на устройстве 3 отображения. При этом отображении желательно, чтобы информация, отображаемая посредством контроллера 10 содействия парковке, включала в себя такую информацию, как направления рулевого управления и углы поворота руля для направления транспортного средства V по вычисленному первому пути или второму пути. Контроллер 10 содействия парковке тем самым выполняет содействие парковке для параллельной парковки.
[0051]
Обработка для изменения целевого положения 102 парковки
Далее, приводится описание обработки для установки угла въезда и неконечного целевого положения 102' парковки на этапе S5 и обработки для вычисления второго пути на этапе S6.
[0052]
Фиг. 9 является принципиальной схемой, показывающей первую обработку для установки угла θ1 въезда относительно доступного пространства 101 парковки через обработку для изменения целевого положения 102 парковки.
[0053]
Контроллер 10 содействия парковке изменяет угол целевого положения 102 парковки относительно доступного пространства 101 парковки и тем самым устанавливает угол θ1 въезда относительно доступного пространства 101 парковки так, что траектория крайнего участка транспортного средства V, движущегося вперед из измененного неконечного целевого положения 102' парковки с предварительно определенным радиусом поворота, может сохранять некоторое расстояние от передней крайней точки P доступного пространства 101 парковки. Здесь, крайний участок транспортного средства V является угловым участком, на стороне внешних колес, транспортного средства V. Дополнительно, передняя конечная точка P доступного пространства 101 парковки является крайним участком препятствия, присутствующего впереди доступного пространства 101 парковки.
[0054]
Как показано на фиг. 9, контроллер 10 содействия парковке устанавливает неконечное целевое положение 102' парковки (положение P4' завершения параллельной парковки) посредством отклонения целевого положения 102 парковки относительно доступного пространства 101 парковки посредством угла θ1 въезда.
[0055]
Рассмотрим второй путь, в котором транспортное средство V движется задним ходом из начального положения P2 для движения задним ходом в неконечное целевое положение 102' парковки через положение P3' возврата. Когда продольная длина sl доступного пространства 101 парковки является небольшой, необходимо определять неконечное целевое положение 102' парковки так, чтобы путь 103' края транспортного средства, которому должен следовать угловой участок Q на стороне внешних колес транспортного средства V в пути из положения P3' возврата в неконечное целевое положение 102' парковки, сохраняет предварительно определенное расстояние d от передней крайней точки P доступного пространства 101 парковки.
[0056]
С этой целью угол θ1 въезда, удовлетворяющий нижеприведенной формуле 1, получается для центра C1 поворота при движении задним ходом транспортного средства V, движущегося задним ходом из положения P3' возврата с предварительно определенным углом поворота руля. Как показано на фиг. 9, этот предварительно определенный угол поворота руля является углом поворота руля, который дает возможность переднему левому крайнему участку транспортного средства V не входить в контакт с передней крайней точкой P доступного пространства 101 парковки, когда транспортное средство V движется задним ходом из положения P3' возврата вдоль пути 103' края транспортного средства.
[0057]
C1P-d=C1Q (формула 1)
Здесь, рассмотрим систему координат, ось X и ось Y которой представляют горизонтальное направление и вертикальное направление по фиг. 9 соответственно, и начало ординат O которой представляет левый угловой участок препятствия впереди доступного пространства 101 парковки.
Px=sw, Py=0 (формула 2)
C1x=(w+r) x sinθ1+roh x cosθ1 (формула 3)
 (формула 4),
(формула 4),
где продольная длина доступного пространства 101 парковки равняется sl, ширина доступного пространства 101 парковки равняется sw, длина транспортного средства V равняется 1, ширина транспортного средства V равняется w, расстояние от вала задних колес транспортного средства V до края кузова транспортного средства V (задний вылет) равняется roh, радиус поворота транспортного средства V, движущегося задним ходом из положения P3' возврата, равняется r, значение координат передней крайней точки P является P (Px, Py), и значение координат центра C1 поворота при движении задним ходом является C1 (C1x, C1y). Посредством этих формул 2, 3 и 4, выполняются нижеприведенные уравнения.
 (формула 5)
(формула 5)
 (формула 6)
(формула 6)
Следовательно, посредством подстановки формул 5 и 6 в формулу 1, чтобы решать формулу 1 для угла θ1, может быть получен угол θ1 въезда относительно доступного пространства 101 парковки.
[0058]
Посредством вышеуказанной первой обработки для изменения целевого положения 102 парковки, контроллер 10 содействия парковке может устанавливать угол въезда и неконечное целевое положение 102' парковки в результате изменения угла целевого положения 102 парковки в соответствии с продольной длиной sl доступного пространства 101 парковки. Тем самым система содействия парковке может предоставлять содействие парковке, которая не допускает вхождения в контакт углового участка Q на стороне внешних колес транспортного средства V с передней крайней точкой P доступного пространства 101 парковки, даже когда доступное пространство 101 парковки является узким. Кроме того, даже когда водителю кажется, что доступное пространство 101 парковки является слишком узким, чтобы параллельно парковаться, система содействия парковке может направлять транспортное средство V в целевое положение 102' парковки, чтобы предоставлять возможность водителю параллельно парковаться.
[0059]
Дополнительно, как показано на фиг. 9, описанной выше по тексту, система содействия парковке может не только выполнять обработку для изменения угла θ1 въезда относительно доступного пространства 101 парковки, но также и получать угол θ2 въезда относительно доступного пространства парковки посредством выполнения второй обработки для изменения целевого положения 102 парковки, которая описывается ниже по тексту.
[0060]
При второй обработке для изменения целевого положения 102 парковки, угол θ2 въезда относительно доступного пространства 101 парковки устанавливается так, что в траектории крайнего участка транспортного средства V, движущегося прямо из измененного положения P4' завершения параллельной парковки, траектория крайнего участка транспортного средства V на стороне, обращенной внутрь доступного пространства 101 парковки, может сохранять некоторое расстояние от крайнего участка доступного пространства 101 парковки. Здесь, крайний участок транспортного средства V является угловым участком транспортного средства V на стороне внешних колес (левым передним крайним участком). Дополнительно, передняя крайняя точка P доступного пространства 101 парковки является крайним участком препятствия, присутствующего впереди доступного пространства 101 парковки.
[0061]
Фиг. 10 является принципиальной схемой, показывающей обработку для установки угла θ2 въезда относительно доступного пространства 101 парковки через вторую обработку для изменения целевого положения 102 парковки.
[0062]
Здесь, рассмотрим второй путь для движения задним ходом транспортного средства V из начального положения P2 для движения задним ходом и достижения неконечного целевого положения 102' парковки через положение P3' возврата. Когда продольная длина sl доступного пространства 101 парковки является небольшой, контроллер 10 содействия парковке устанавливает угол θ2 въезда относительно доступного пространства 101 парковки таким образом, что из траекторий четырех крайних участков транспортного средства V, движущегося прямо из неконечного целевого положения 102' парковки, траектория крайнего участка транспортного средства V на стороне, обращенной внутрь доступного пространства 101 парковки (прямая линия A), может сохранять некоторое расстояние d от передней крайней точки P доступного пространства 101 парковки.
[0063]
При установке такого угла θ2 въезда транспортного средства V, операция транспортного средства V из положения P3' возврата в неконечное целевое положение 102' парковки заключается в том, чтобы перемещать транспортное средство V задним ходом с рулем в, по существу, нейтральном положении. Соответственно, траектория из положения P3' возврата в неконечное целевое положение 102' парковки является, по существу, прямой.
[0064]
Как показано на фиг. 10, пересечение между удлиненной линией прямой линии B, формирующей доступное пространство 101 парковки, и прямой линией A указывается посредством P11. Помимо этого, пересечение между доступным пространством 101 парковки и перпендикуляром к доступному пространству 101 парковки от пересечения P11 указывается посредством P12, а пересечение между прямой линией A и доступным пространством 101 парковки указывается посредством P13. Дополнительно, когда используются продольная длина sl доступного пространства 101 парковки, ширина sw доступного пространства 101 парковки и длина 1 транспортного средства V и ширина w транспортного средства V, как описано выше по тексту, выполняются нижеприведенные уравнения.
сегмент P11P12=sw (формула 7)
сегмент P12P13=sl-d/cosθ2-wcosθ2 (формула 8)
Для ΔP11P12P13 выполняется нижеприведенное уравнение.
tanθ2=P12P13/P11P12 (формула 9)
Посредством подстановки формул 7 и 8 в формулу 9 получается нижеприведенное уравнение.
tanθ2=(sl-d/cosθ2-wcosθ2)/sw (формула 10)
Когда эта формула 10 решается для угла θ2, может быть получен угол θ2 въезда, который является углом, сформированным посредством неконечного целевого положения 102' парковки и доступного пространства 101 парковки.
[0065]
Посредством вышеописанной второй обработки для изменения целевого положения 102 парковки, контроллер 10 содействия парковке может устанавливать угол въезда и неконечное целевое положение 102' парковки, получаемое в результате изменения, в соответствии с доступным пространством 101 парковки, целевого положения 102 парковки, чтобы направлять транспортное средство V. Тем самым, как показано с помощью траектории A1 на фиг. 10, система содействия парковке предоставляет возможность транспортному средству V поворачиваться вокруг центра C поворота при движении задним ходом из начального положения P2 для движения задним ходом в положение P3' возврата и двигаться прямо из положения P3' возврата в неконечное целевое положение 102' парковки. Тем самым, даже когда доступное пространство 101 парковки является узким, транспортному средству V может предоставляться содействие парковке, которое не допускает вхождения в контакт углового участка Q на стороне внешних колес транспортного средства V с передней крайней точкой P доступного пространства 101 парковки. Дополнительно, даже когда водителю кажется, что доступное пространство 101 парковки является слишком узким, чтобы параллельно парковаться, транспортное средство V может направляться в неконечное целевое положение 102' парковки, чтобы предоставлять возможность водителю параллельно парковаться.
[0066]
Следует отметить, что контроллер 10 содействия парковке может вычислять несколько вторых путей, включающих в себя: путь, показанный на фиг. 9, для движения транспортного средства в неконечное целевое положение 102' парковки посредством поворота; и путь для движения транспортного средства прямо в неконечное целевое положение 102' парковки. Затем, контроллер 10 содействия парковке также допускает отображение нескольких вторых путей.
[0067]
Далее проводится сравнение между первой обработкой для изменения целевого положения 102 парковки и второй обработкой для изменения целевого положения 102 парковки. По сравнению со второй обработкой для изменения целевого положения 102 парковки, первая обработка для изменения целевого положения 102 парковки может сокращать число возвратов для задания ориентации транспортного средства V параллельной доступному пространству 101 парковки после того, как транспортное средство остановлено с отклонением относительно доступного пространства 101 парковки посредством угла θ1 въезда.
[0068]
Причина этого заключается в следующем. Как показано на фиг. 9, транспортное средство V движется из положения P3' возврата в положение P4' завершения параллельной парковки посредством поворота. Следовательно, угол θ1 въезда, полученный посредством первой обработки для изменения целевого положения 102 парковки, может быть задан меньше угла θ2 въезда, полученного посредством второй обработки для изменения целевого положения 102 парковки.
[0069]
Тем не менее, первая обработка для изменения целевого положения 102 парковки заставляет транспортное средство V поворачивать при движении из положения P3' возврата в положение P4' завершения параллельной парковки. По этой причине, угловой участок (передняя точка P) впереди идущего транспортного средства приближается к угловому участку Q на стороне внешних колес транспортного средства V. Соответственно, содействие парковке посредством первой обработки для изменения целевого положения 102 парковки с большей вероятностью должна вызывать у водителя чувство неудобства, чем содействие парковке посредством второй обработки для изменения целевого положения 102 парковки.
[0070]
Напротив, вторая обработка для изменения целевого положения 102 парковки заставляет транспортное средство V двигаться задним ходом по существу прямо при движении из положения P3' возврата в положение P4' завершения параллельной парковки. Таким образом, расстояние между угловым участком (передней крайней точкой P) впереди идущего транспортного средства V и угловым участком Q на стороне внешних колес транспортного средства остается неизмененным, не вызывая чувства неудобства у водителя.
[0071]
Тем не менее, угол θ2 въезда, полученный посредством второй обработки для изменения целевого положения 102 парковки, превышает угол θ1 въезда, полученный посредством первой обработки для изменения целевого положения 102 парковки. Это приводит к большему числу возвратов для задания ориентации транспортного средства V параллельной доступному пространству 101 парковки после остановки в положении P4' завершения параллельной парковки.
[0072]
Обработка для вычисления пути в измененное целевое положение 102' парковки
Далее, приводится описание обработки для вычисления пути для движения транспортного средства V из исходного положения P1 в положение P4' завершения параллельной парковки после того, как устанавливаются угол въезда и неконечное целевое положение 102' парковки, как описано выше по тексту.
[0073]
Фиг. 11 является принципиальной схемой, иллюстрирующей обработку вычисления первого пути. Обработка вычисления первого пути выполняется после первой обработки для изменения целевого положения 102 парковки.
[0074]
При параллельной парковке, транспортное средство V движется вперед из исходного положения P1 в начальное положение P2 для движения задним ходом с рулем в нейтральном положении. После этого, руль поворачивается влево, и транспортное средство V движется задним ходом в положение P3' возврата при фиксированном угле поворота руля. При этом угле поворота руля транспортному средству V разрешается двигаться задним ходом вплоть до тех пор, пока крайний участок транспортного средства V не войдет в контакт с путем 103' края транспортного средства. Кроме того, руль поворачивается вправо в положение P3' возврата, и транспортное средство V движется задним ходом в положение P4' завершения параллельной парковки при фиксированном угле поворота руля. Этот угол поворота руля дает возможность транспортному средству V двигаться задним ходом при том, что крайний участок транспортного средства V следует пути 103' края транспортного средства.
[0075]
Чтобы направлять транспортное средство V таким образом, контроллер 10 содействия парковке получает расстояние d1 от исходного положения P1 до начального положения P2 для движения задним ходом.
[0076]
Во-первых, ось X и ось Y устанавливаются для системы координат. Начало ординат O(0,0) устанавливается как центр вала задних колес в исходном положении P1, центр вала задних колес в начальном положении P2 для движения задним ходом устанавливается как S(Sx, Sy), и центр поворота при движении задним ходом транспортного средства V, движущегося задним ходом из начального положения P2 для движения задним ходом с предварительно определенным углом поворота руля, устанавливается как C2(C2x, C2y). Затем, выполняются нижеприведенные уравнения.
Sx=0 (формула 11)
Sy=d1 (формула 12)
C2x=-w/2-r (формула 13)
C2y=d1 (формула 14)
На фиг. 11, поскольку координата центра C1 поворота при движении задним ходом уже получена, как описано выше по тексту со ссылкой на фиг. 9, и поскольку расстояние между центром C1 поворота при движении задним ходом и центром C2 поворота при движении задним ходом составляет 2×r+w, выполняется нижеприведенное уравнение.
(C1x-C2x)2+(C1y-C2y)2=(2×r+w)2 (формула 15)
Расстояние d1 от исходного положения P1 до начального положения P2 для движения задним ходом может быть получено посредством подстановки формул 13 и 14 в формулу 15. Следует отметить, что поскольку координата начала ординат, показанного на фиг. 9, изменяется так, как показано на фиг. 11, формулы 3 и 4, описанные выше по тексту, не могут быть использованы в исходном виде и должны быть преобразованы в формулы в системе координат с началом ординат O, показанным на фиг. 11, чтобы получать центр C1 поворота при движении задним ходом.
[0077]
Что касается случая начала содействия парковке в начальном положении P2 для движения задним ходом, положение P3' возврата для поворота руля в противоположном направлении на пути в неконечное целевое положение 102' парковки может быть получено аналогичным образом. Другими словами, центр C2 поворота при движении задним ходом транспортного средства V, движущегося задним ходом из начального положения P2 для движения задним ходом с предварительно определенным углом поворота руля, устанавливается так, как показано в формулах 13 и 14, и положение P3' возврата устанавливается в положение, в котором угловой участок транспортного средства V входит в контакт с путем 103' края транспортного средства, когда транспортное средство V движется задним ходом при предварительно определенном угле поворота руля для движения задним ходом из начального положения P2 для движения задним ходом вокруг центра C2 поворота при движении задним ходом.
[0078]
Фиг. 12 является принципиальной схемой, иллюстрирующей обработку вычисления второго пути. Обработка вычисления второго пути выполняется после второй обработки для изменения целевого положения 102 парковки.
[0079]
Контроллер 10 содействия парковке получает расстояние d1 от исходного положения P1 до начального положения P2 для движения задним ходом. Как показано на фиг. 12, ось X и ось Y устанавливаются для системы координат, и начало ординат O(0, 0) устанавливается как центр вала задних колес в исходном положении P1. Контроллер 10 содействия парковке устанавливает центр поворота транспортного средства V, движущегося задним ходом из положения P3' возврата с любым углом поворота руля к C(Cx, Cy). Расстояние d1 между исходным положением P1 и начальным положением P2 для движения задним ходом получается с использованием такого состояния, что r является расстоянием между прямой линией A и центром C поворота транспортного средства V, движущегося задним ходом из начального положения P2 для движения задним ходом. Во-первых, поскольку отклонение прямой линии A относительно продольного направления доступного пространства 101 парковки составляет tanθ2, и прямая линия A пересекает прямую линию B в пересечении P11(Px, Py), уравнение, выражающее прямую линию A, удовлетворяет следующему:
 (формула 16)
(формула 16)
 (формула 17)
(формула 17)
Поскольку расстояние между центром C поворота и прямой линией A составляет r, выполняется нижеприведенное уравнение.
 (формула 18)
(формула 18)
Здесь, выполняются нижеприведенные уравнения.
 (формула 19)
(формула 19)
 (формула 20)
(формула 20)
Следовательно, расстояние d1 между исходным положением P1 и начальным положением P2 для движения задним ходом может быть получено посредством подстановки формул 19 и 20 в формулу 18.
[0080]
Что касается случая начала содействия парковке в начальном положении P2 для движения задним ходом, положение P3' возврата для поворота руля в противоположном направлении на пути в неконечное целевое положение 102' парковки может быть получено аналогичным образом. Другими словами, центр C поворота при движении задним ходом транспортного средства V, движущегося задним ходом из начального положения P2 для движения задним ходом при предварительно определенном угле поворота руля, устанавливается так, как указано в формулах 19 и 20, и положение P3' возврата устанавливается как положение, в котором транспортное средство V выравнивается продольно с прямой линией A после движения задним ходом при предварительно определенном угле поворота руля для движения задним ходом из начального положения P2 для движения задним ходом вокруг центра C поворота при движении задним ходом.
[0081]
После определения пути через обработку вычисления первого пути или обработку вычисления второго пути, контроллер 10 содействия парковке, во-первых, осуществляет отображение, чтобы направлять транспортное средство V так, что оно движется вперед из исходного положения P1 в начальное положение P2 для движения задним ходом с рулем в нейтральном положении, и выполняет это. Контроллер 10 содействия парковке распознает, что транспортное средство V достигло начального положения P2 для движения задним ходом, посредством распознавания, что транспортное средство V продвинулось на расстояние d1, на основе угла поворота руля, зарегистрированного посредством датчика 6 угла поворота, и скорости транспортного средства, зарегистрированной посредством датчика 7 скорости транспортного средства.
[0082]
После этого контроллер 10 содействия парковке пересчитывает путь из начального положения P2 для движения задним ходом в неконечное целевое положение 102' парковки через положение P3' возврата, осуществляет отображение, чтобы направлять транспортное средство V, чтобы двигаться вдоль пути в положение P3' возврата, и выполняет это. Например, контроллер 10 содействия парковке отображает угол поворота руля, с тем чтобы выравнивать фактический угол поворота руля с целевым углом поворота руля, вычисленным в начальном положении P2 для движения задним ходом.
[0083]
Контроллер 10 содействия парковке распознает, что транспортное средство V достигло положения P3' возврата, на основе угла поворота руля, зарегистрированного посредством датчика 6 угла поворота, и скорости транспортного средства, зарегистрированной посредством датчика 7 скорости транспортного средства. Затем, контроллер 10 содействия парковке выполняет, к примеру, осуществление отображения, чтобы направлять транспортное средство V так, что оно движется из положения P3' возврата в положение P4' завершения параллельной парковки, посредством отображения информации для поворота руля в противоположном направлении.
[0084]
Таким образом, когда транспортное средство V должно быть параллельно припарковано в узком доступном пространстве 101 парковки, система содействия парковке может направлять транспортное средство V вдоль оптимального пути до тех пор, пока транспортное средство V не достигнет неконечного целевого положения 102' парковки, даже если система содействия парковке устанавливает неконечное целевое положение 102' парковки посредством изменения угла целевого положения 102 парковки через обработку для установки угла въезда и неконечного целевого положения 102' парковки.
[0085]
Следует отметить, что после вычисления пути в неконечное целевое положение 102' парковки, контроллер 10 содействия парковке может направлять транспортное средство V посредством отображения пути на устройстве 3 отображения, предоставления аудиоруководства относительно углов поворота руля и направлений движения и направлений поворота руля или управления углом поворота руля посредством актуатора 4 рулевого управления.
[0086]
Обработка для вычисления пути в неизмененное целевое положение 102 парковки
Далее, приводится описание обработки для вычисления пути парковки для движения транспортного средства V из неконечного целевого положения 102' парковки в точку, в которой продольное направление транспортного средства V становится параллельным продольному направлению доступного пространства 101 парковки, причем обработка выполняется посредством контроллера 10 содействия парковке.
[0087]
Фиг. 13 является схемой, показывающей первую обработку для направления транспортного средства V, которое отклоняется только на угол θ1 въезда относительно доступного пространства 101 парковки, в положение, в котором ориентация транспортного средства V является параллельной доступному пространству 101 парковки.
[0088]
После того как транспортное средство V останавливается в положении P4' завершения параллельной парковки, контроллер 10 содействия парковке направляет транспортное средство V так, что оно движется вперед, с рулем, фиксированным при любом некотором угле поворота руля, в положение P5 вдоль траектории поворота вокруг центра C1 поворота, как показано на фиг. 13(a). Положение P5 устанавливается как положение, которое дает возможность транспортному средству V не входить в контакт с препятствием в передней крайней точке P доступного пространства 101 парковки. После этого, как показано на фиг. 13(b), контроллер 10 содействия парковке направляет транспортное средство V так, что оно движется задним ходом из положения P5 в положение P6 вокруг центра C2 поворота. Затем, как показано на фиг. 13(c), контроллер 10 содействия парковке направляет транспортное средство V так, что оно движется вперед из положения P6 в положение P7 вокруг центра C3 поворота.
[0089]
Таким образом, контроллер 10 содействия парковке направляет транспортное средство V так, что оно неоднократно движется вперед и задним ходом до тех пор, пока транспортное средство V не становится параллельным доступному пространству 101 парковки. В случае, показанном на фиг. 13, продольное направление транспортного средства V становится параллельным продольному направлению доступного пространства 101 парковки посредством движения вперед из положения 6 вокруг центра C3 поворота.
[0090]
Следует отметить, что, после вычисления пути в целевое положение 102 парковки, контроллер 10 содействия парковке может направлять транспортное средство V посредством отображения пути на устройстве 3 отображения, предоставления аудиоруководства относительно углов поворота руля и направлений движения и направлений поворота руля или управления углом поворота руля посредством актуатора 4 рулевого управления.
[0091]
Фиг. 14 и 15 являются схемами, показывающими вторую обработку для направления транспортного средства V, которое отклоняется только на угол θ2 въезда относительно доступного пространства 101 парковки, в положение, в котором ориентация транспортного средства V является параллельной доступному пространству 101 парковки.
[0092]
После того как транспортное средство V останавливается в положении P4' завершения параллельной парковки, контроллер 10 содействия парковке направляет транспортное средство V так, что оно движется вперед, с рулем, фиксированным при некотором угле поворота руля, в положение P5 вдоль траектории поворота вокруг центра C1 поворота, как показано на фиг. 14(a). Положение P5 устанавливается как положение, которое дает возможность транспортному средству V не входить в контакт с препятствием в передней крайней точке P доступного пространства 101 парковки. После этого, как показано на фиг. 14(b), контроллер 10 содействия парковке направляет транспортное средство V так, что оно движется задним ходом из положения P5 в положение P6 вдоль прямой линии C с рулем в нейтральном положении. Транспортное средство V не входит в контакт с задним крайним участком доступного пространства 101 парковки в положении P6.
[0093]
После этого, как показано на фиг. 15(a), транспортное средство V направляется так, что оно движется вперед в положение P7, в котором транспортное средство V не входит в контакт с передней крайней точкой P доступного пространства 101 парковки, посредством поворота вдоль траектории поворота вокруг центра C1 поворота с рулем, фиксированным при некотором угле поворота руля. Затем, как показано на фиг. 15(b), транспортное средство V направляется так, что оно движется задним ходом прямо, с рулем в нейтральном положении, в положение P8, в котором транспортное средство V не входит в контакт с задним угловым участком доступного пространства 101 парковки. Таким образом, контроллер 10 содействия парковке направляет транспортное средство V так, что оно неоднократно движется вперед в положения, в которых транспортное средство V не входит в контакт с крайним участком доступного пространства 101 парковки, посредством поворота вдоль траектории поворота, и затем движется задним ходом прямо в положения, в которых транспортное средство V не входит в контакт с задним крайним участком доступного пространства 101 парковки.
[0094]
Тем самым, как показано на фиг. 15(c), в завершение, контроллер 10 содействия парковке может направлять транспортное средство V в положение P9, в котором продольное направление транспортного средства V является параллельным продольному направлению доступного пространства 101 парковки, посредством движения вперед из положения P8 при повороте.
[0095]
Число возвратов для задания продольного направления транспортного средства V параллельным продольному направлению доступного пространства 101 парковки больше при второй обработке, чем при первой обработке, показанной на фиг. 13. Тем не менее, в отношении расстояния между транспортным средством V и внутренней линией 101a доступного пространства 101 парковки, расстояние d11, показанное на фиг. 13(c), может быть задано меньше расстояния d12, показанного на фиг. 15(c).
[0096]
Как подробно описано выше по тексту, согласно системе содействия парковке, показанной как настоящий вариант осуществления, целевое положение 102 парковки устанавливается в доступном пространстве 101 парковки. Затем, в случае если определяется то, что крайний участок транспортного средства V входит в контакт с крайним участком доступного пространства 101 парковки, если транспортное средство V движется для парковки в целевом положении 102 парковки, система содействия парковке вычисляет путь парковки для движения транспортного средства V в неконечное целевое положение 102' парковки посредством изменения угла въезда относительно доступного пространства 101 парковки таким образом, что транспортное средство V может двигаться в направлении целевого положения 102 парковки при поддержании крайнего участка транспортного средства V на расстоянии от крайнего участка доступного пространства 101 парковки. Согласно данной системе содействия парковке, в случае если определяется, что крайний участок транспортного средства V будет входить в контакт с крайним участком доступного пространства 101 парковки, если транспортное средство V движется для парковки в целевом положении 102 парковки, угол целевого положения 102 парковки относительно доступного пространства 101 парковки изменяется. По этой причине, содействие парковке может предоставляться даже в случае, если прогнозируется, что крайний участок транспортного средства V будет входить в контакт с препятствием.
[0097]
Помимо этого, данная система содействия парковке вычисляет несколько вторых путей, включающих в себя путь для движения транспортного средства V в неконечное целевое положение 102' парковки посредством поворота и путь для движения транспортного средства V прямо в неконечное целевое положение 102' парковки. Тем самым данная система содействия парковке может отображать два типа путей: один, при котором транспортное средство V движется посредством поворота, и второй, при котором транспортное средство V движется прямо. Дополнительно, данная система содействия парковке может давать возможность водителю выбирать то, какой путь использовать.
[0098]
Помимо этого, данная система содействия парковке устанавливает угол θ1 въезда транспортного средства V относительно доступного пространства 101 парковки таким образом, что траектория крайнего участка транспортного средства V, движущегося вперед из неконечного целевого положения 102' парковки с предварительно определенным радиусом поворота, может сохранять некоторое расстояние от крайнего участка доступного пространства 101 парковки. Тем самым транспортное средство V может парковаться посредством движения задним ходом при сохранении некоторого расстояния от крайнего участка доступного пространства 101 парковки.
[0099]
Кроме того, согласно данной системе содействия парковке, угол θ2 въезда транспортного средства V относительно доступного пространства 101 парковки устанавливается так, что в возможных траекториях крайнего участка транспортного средства V, движущегося прямо из неконечного целевого положения 102' парковки, траектория крайнего участка транспортного средства V на стороне, обращенной внутрь доступного пространства 101 парковки, может сохранять некоторое расстояние от крайнего участка доступного пространства 101 парковки. Тем самым транспортное средство V может парковаться посредством движения задним ходом при сохранении некоторого расстояния от крайнего участка доступного пространства 101 парковки.
[0100]
Дополнительно, данная система содействия парковке вычисляет путь парковки для движения транспортного средства V из неконечного целевого положения 102' парковки до тех пор, пока продольное направление транспортного средства V не становится параллельным продольному направлению доступного пространства 101 парковки. Соответственно, даже если транспортное средство V направляется в неконечное целевое положение 102' парковки, содействие парковке может предоставляться, чтобы направлять транспортное средство V из неконечного целевого положения 102' парковки до тех пор, пока транспортное средство V не становится параллельным доступному пространству 101 парковки.
[0101]
Кроме того, данная система содействия парковке получает начальное положение P2 для движения задним ходом для начала движения задним ходом транспортного средства V в неконечное целевое положение 102' парковки и положение P3' возврата для возврата руля, чтобы перемещать транспортное средство V в направлении неконечного целевого положения 102' парковки после начала движения задним ходом из начального положения P2 для движения задним ходом. Тем самым транспортное средство V может направляться из начального положения P2 для движения задним ходом в неконечное целевое положение 102' парковки.
[0102]
Дополнительно, данная система содействия парковке вычисляет путь парковки, который приводит к тому, что продольное направление транспортного средства V, которое направлено в неконечное целевое положение 102' парковки, становится параллельным продольному направлению доступного пространства 101 парковки, посредством неоднократного движения вперед с рулем, фиксированным при некотором угле поворота руля, и движения задним ходом с рулем, фиксированным при некотором угле поворота руля. Тем самым даже если транспортное средство V направляется в неконечное целевое положение 102' парковки, транспортное средство V может парковаться в неизмененном целевом положении 102 парковки.
[0103]
Кроме того, данная система содействия парковке вычисляет путь парковки, который приводит к тому, что продольное направление транспортного средства V, которое направлено в неконечное целевое положение 102' парковки, становится параллельным продольному направлению доступного пространства 101 парковки, посредством неоднократного движения вперед с рулем, фиксированным при некотором угле поворота руля, и движения задним ходом с углом поворота руля в нейтральном положении. Тем самым даже если транспортное средство V направляется в неконечное целевое положение 102' парковки, транспортное средство V может парковаться в целевом положении 102 парковки.
[0104]
Следует отметить, что вышеописанный вариант осуществления является примером настоящего изобретения. Следовательно, разумеется, настоящее изобретение не ограничено вышеприведенным вариантом осуществления и может различными способами переключаться на режимы, отличные от вышеприведенного варианта осуществления, согласно конструкции и т.п. без отступления от технической идеи настоящего изобретения.
[0105]
В варианте осуществления, описанном выше по тексту, средство регистрации доступного пространства парковки для регистрации доступного пространства парковки соответствует функции контроллера 10 содействия парковке для установки доступного пространства 101 парковки и обработки для установки доступного пространства 101 парковки на этапе S1. Средство установки конечного целевого положения парковки для установки конечного целевого положения парковки соответствует функции контроллера 10 содействия парковке для установки целевого положения 102 парковки и обработки для установки целевого положения 102 парковки на этапе S1. Средство определения контакта для определения того, существует или нет первый путь для достижения транспортным средством V конечного целевого положения 102 парковки без вхождения в контакт с крайним участком доступного пространства 101 парковки, соответствует функции контроллера 10 содействия парковке для определения того, входит или нет крайний участок транспортного средства V в контакт с передней крайней точкой P, и обработки на этапе S2. Средство вычисления неконечного целевого положения парковки, когда средство определения контакта определяет, что первый путь не существует, для вычисления угла въезда и неконечного целевого положения 102' парковки, причем угол въезда предоставляет возможность транспортному средству V въезжать в доступное пространство 101 парковки без вхождения в контакт с крайним участком доступного пространства 101 парковки, причем неконечное целевое положение 102' парковки является положением, которое должно быть достигнуто, когда транспортное средство V въезжает в доступное пространство 101 парковки посредством использования угла въезда, соответствует функции контроллера 10 содействия парковке для установки углов θ1, θ2 въезда и неконечного целевого положения 102' парковки, а также обработки на этапе S5. Средство вычисления второго пути для вычисления второго пути для достижения транспортным средством V неконечного целевого положения 102' парковки, вычисленного посредством средства вычисления неконечного целевого положения парковки, соответствует функции контроллера 10 содействия парковке для вычисления пути из исходного положения P1 в положение P4' завершения параллельной парковки и обработки на этапе S6. Средство вычисления третьего пути для вычисления третьего пути для достижения транспортным средством V конечного целевого положения 102 парковки из неконечного целевого положения 102' парковки соответствует обработке, в которой контроллер 10 содействия парковке вычисляет путь из неконечного целевого положения 102' парковки в конечное целевое положение 102 парковки, как показано на фиг. 13-16. Средство отображения для отображения первого пути, когда средство определения контакта определяет то, что первый путь существует, и для отображения второго пути и третьего пути, когда средство определения контакта определяет, что первый путь не существует, соответствует обработке, при которой устройство 3 отображения отображает путь посредством управления посредством контроллера 10 содействия парковке, и обработке на этапе S4.
Промышленная применимость
[0106]
Настоящее изобретение может быть применимым в отрасли устройств содействия парковке, выполненных с возможностью представлять водителю информацию для парковки транспортного средства.
Список номеров ссылок
[0107]
1a-1d - установленная на транспортном средстве камера
2a, 2b - ультразвуковой сонар
3 - устройство отображения
4 - актуатор рулевого управления
5 - устройство ввода операции
6 - датчик угла поворота
7 - датчик скорости транспортного средства
10 - контроллер содействия парковке
101 - доступное пространство парковки
102 - целевое положение парковки
102' - нецелевое положение парковки
103 - путь края транспортного средства
P1 - исходное положение
P2 - начальное положение для движения задним ходом
P3 - положение возврата
P4 - положение завершения параллельной парковки










Группа изобретений относится к устройству и способу содействия парковке. Устройство содержит средство регистрации доступного пространства парковки, средство установки конечного целевого положения парковки, средство определения контакта, средство вычисления неконечного целевого положения парковки, средство вычисления первого, второго и третьего путей, средство отображения первого пути, второго пути и третьего пути. Средство определения контакта обеспечивает определение того, существует или нет первый путь для достижения транспортным средством конечного целевого положения парковки без вхождения в контакт с крайним участком доступного пространства парковки. Способ заключается в том, что регистрируют доступное пространство парковки, устанавливают конечное целевое положение парковки, определяют существование первого пути для достижения транспортным средством конечного целевого положения парковки без вхождения в контакт с крайним участком доступного пространства парковки. Отображают первый путь, если первый путь существует. Вычисляют угол въезда и неконечное целевое положение парковки, если первый путь не существует. Неконечное целевое положение парковки является положением, которое должно быть достигнуто, когда транспортное средство въезжает в доступное пространство парковки при угле въезда. Вычисляют второй и третий пути и отображают их. Технический результат заключается в повышении эффективности содействия парковке. 2 н. и 8 з.п. ф-лы, 15 ил.
1. Устройство содействия парковке, содержащее средство регистрации доступного пространства парковки для регистрации доступного пространства парковки, средство установки конечного целевого положения парковки для установки конечного целевого положения парковки в доступном пространстве парковки, зарегистрированном посредством средства регистрации доступного пространства парковки, средство определения контакта для определения того, существует или нет первый путь для достижения транспортным средством конечного целевого положения парковки без вхождения в контакт с крайним участком доступного пространства парковки, средство вычисления неконечного целевого положения парковки, когда средство определения контакта определяет, что первый путь не существует, для вычисления угла въезда и неконечного целевого положения парковки, причем угол въезда дает возможность транспортному средству въезжать в доступное пространство парковки посредством движения прямо без вхождения в контакт с крайним участком доступного пространства парковки, причем неконечное целевое положение парковки является положением, которое должно быть достигнуто, когда транспортное средство въезжает в доступное пространство парковки при угле въезда, средство вычисления второго пути для вычисления второго пути для достижения транспортным средством неконечного целевого положения парковки, вычисленного посредством средства вычисления неконечного целевого положения парковки посредством движения прямо, средство вычисления третьего пути для вычисления третьего пути для достижения транспортным средством конечного целевого положения парковки из неконечного целевого положения парковки, и средство отображения для отображения первого пути, когда средство определения контакта определяет то, что первый путь существует, и для отображения второго пути и третьего пути, когда средство определения контакта определяет то, что первый путь не существует.
2. Устройство содействия парковке по п.1, в котором в качестве угла въезда средство вычисления нецелевого положения парковки вычисляет угол въезда, который предоставляет возможность транспортному средству въезжать в доступное пространство парковки посредством движения с рулем, по существу, в нейтральном положении, без вхождения в контакт с крайним участком доступного пространства парковки, и в качестве второго пути средство вычисления второго пути вычисляет путь для достижения транспортным средством неконечного целевого положения парковки посредством движения с рулем, по существу, в нейтральном положении.
3. Устройство содействия парковке по любому одному из пп.1 и 2, в котором средство вычисления второго пути вычисляет множество вторых путей, включающих в себя путь для движения транспортного средства в неконечное целевое положение парковки посредством поворота и путь для движения транспортного средства прямо в неконечное целевое положение парковки.
4. Устройство содействия парковке по любому одному из пп.1 и 2, в котором средство вычисления неконечного целевого положения парковки устанавливает угол въезда таким образом, что траектория крайнего участка транспортного средства, движущегося вперед из неконечного целевого положения парковки с предварительно определенным радиусом поворота, сохраняет некоторое расстояние от крайнего участка доступного пространства парковки.
5. Устройство содействия парковке по любому одному из пп.1 и 2, в котором средство вычисления неконечного целевого положения парковки устанавливает угол въезда таким образом, что траектория крайнего участка транспортного средства, движущегося задним ходом прямо из неконечного целевого положения парковки, сохраняет некоторое расстояние от крайнего участка доступного пространства парковки.
6. Устройство содействия парковке по любому одному из пп.1 и 2, в котором средство вычисления второго пути получает начальное положение для движения задним ходом для начала движения задним ходом транспортного средства в направлении неконечного целевого положения парковки, вычисленного посредством средства вычисления неконечного целевого положения парковки, и положение возврата, после того, как транспортное средство начинает движение задним ходом из начального положения для движения задним ходом, для возврата руля в противоположном направлении, чтобы перемещать транспортное средство в направлении неконечного целевого положения парковки.
7. Устройство содействия парковке по п.1, в котором средство вычисления третьего пути вычисляет третий путь для неоднократного движения вперед транспортного средства с рулем, фиксированным при некотором угле поворота руля, и движения задним ходом с рулем, фиксированным при некотором угле поворота руля, так что продольное направление транспортного средства становится параллельным продольному направлению доступного пространства парковки.
8. Устройство содействия парковке по любому одному из пп.1 и 2, в котором средство вычисления третьего пути вычисляет третий путь для неоднократного движения вперед транспортного средства с рулем, фиксированным при некотором угле поворота руля, и движения задним ходом с рулем при нейтральном угле поворота руля, так что продольное направление транспортного средства становится параллельным продольному направлению доступного пространства парковки.
9. Способ содействия парковке, содержащий этапы: регистрируют доступное пространство парковки и устанавливают конечное целевое положение парковки в доступном пространстве парковки, определяют, существует или нет первый путь для достижения транспортным средством конечного целевого положения парковки без вхождения в контакт с крайним участком доступного пространства парковки, когда первый путь существует, отображают первый путь, когда первый путь не существует, вычисляют угол въезда и неконечное целевое положение парковки, причем угол въезда дает возможность транспортному средству въезжать в доступное пространство парковки посредством движения прямо без вхождения в контакт с крайним участком доступного пространства парковки, причем неконечное целевое положение парковки является положением, которое должно быть достигнуто, когда транспортное средство въезжает в доступное пространство парковки при угле въезда, вычисляют второй путь для достижения транспортным средством неконечного целевого положения парковки посредством движения прямо и третий путь для достижения транспортным средством конечного целевого положения парковки из неконечного целевого положения парковки и отображают второй путь и третий путь.
10. Способ содействия парковке по п.9, содержащий этапы, на которых в качестве угла въезда, вычисляют угол въезда, который предоставляет возможность транспортному средству въезжать в доступное пространство парковки посредством движения с рулем, по существу, в нейтральном положении, без вхождения в контакт с крайним участком доступного пространства парковки, и в качестве второго пути, вычисляют путь для достижения транспортным средством неконечного целевого положения парковки посредством движения с рулем, по существу, в нейтральном положении.
| JP 2003291759 A, 15.10.2003 | |||
| JP 2009061975 A, 26.03.2009 | |||
| JP 2009298179 A, 24.12.2009 | |||
| УСТРОЙСТВО ДЛЯ АВТОМОБИЛЯ | 2005 |
|
RU2380725C2 |

