Изобретение относится к области космической техники, а именно к системам управления ориентацией космических аппаратов, функционирующих в условиях действия координатно-параметрических воздействий и при наличии перекрестных связей между каналами управления.
Известен способ управления пространственной ориентацией космического аппарата, заключающийся в задании вектора входных углов ориентации, измерении вектора выходных углов ориентации, измерении вектора выходных угловых скоростей ориентации и формировании вектора сигналов управления [1].
К недостаткам известного способа относится низкое качество переходных процессов, что требует значительных энергозатрат на управление ориентацией при действии координатно-параметрических помех и перекрестных связей между каналами управления.
С целью улучшения качества переходных процессов предложен способ управления ориентацией, отличающийся тем, что формируется эталонный вектор выходных угловых скоростей ориентации, определяется вектор сигналов разности эталонного вектора выходных угловых скоростей ориентации и вектора выходных угловых скоростей ориентации, усиливается вектор сигналов разности и суммируется с вектором сигналов управления.
Известна система управления ориентацией космического аппарата, которая содержит последовательно соединенные блок задатчиков угла, блок регуляторов, блок исполнительного устройства, космический аппарат и блок датчиков угла, выход которого соединен со вторым входом блока регуляторов, выход космического аппарата через блок датчиков угловой скорости соединен с третьим входом блока регуляторов [1].
Недостаток известной системы управления ориентацией заключается в низком качестве переходных процессов, требующих значительных энергозатрат на управления ориентацией.
Для исключения указанного недостатка предложенная система управления ориентацией отличается тем, что она дополнительно содержит модель блока регуляторов, модель блока исполнительных устройств, модель космического аппарата без перекрестных обратных связей, модель блока датчиков угла, модель блока датчиков угловой скорости, блок усилителей, блок сумматоров, выход блока задатчиков угла через последовательно соединенные модель блока регуляторов, модель блока исполнительных устройств, модель космического аппарата без перекрестных обратных связей, модель блока датчиков угловой скорости, блок сумматоров и блок усилителей соединен с четвертым входом блока регуляторов, выход модели блока датчиков угла соединен со вторым входом модели блока регуляторов, третий вход которого соединен с выходом модели блока датчиков угловой скорости.
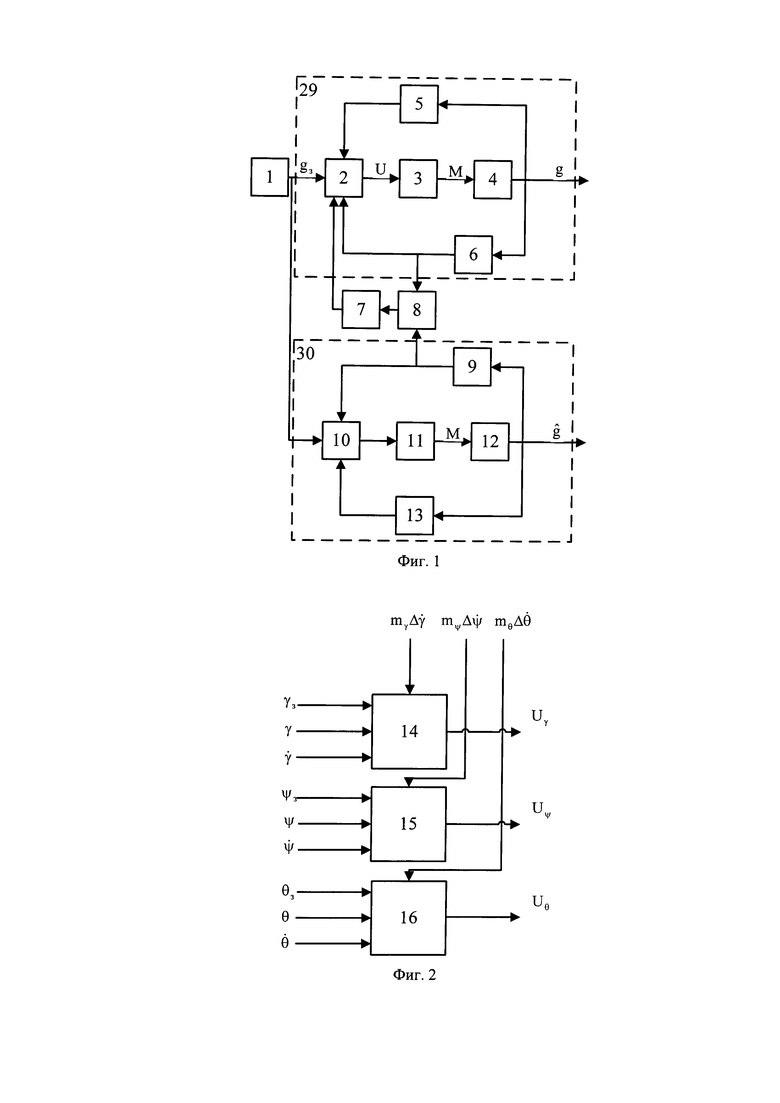
Сущность изобретения поясняется Фиг. 1-7, на Фиг. 1 изображена структурная схема системы управления пространственной ориентацией космического аппарата с векторными связями между блоками схемы, на Фиг. 2 приведена структурная схема блока регуляторов 2, на Фиг. 3 - структурная схема регулятора крена 14, на Фиг. 4 - структура регулятора крена модели блока регуляторов 10, на Фиг. 5 - соединение блока сумматоров 8 и блока усилителей 7 и их структурные схемы, на Фиг. 6 - переходные процессы известной системы управления на выходе космического аппарата 4, на Фиг. 7 - переходные процессы предложенной системы управления, где приняты следующие обозначения:
1 - блок задатчиков угла ориентации;
2 - блок регуляторов;
3 - блок исполнительных устройств;
4 - космический аппарат;
5 - блок датчиков угла;
6 - блок датчиков угловой скорости;
7 - блок усилителей;
8 - блок сумматоров;
9 - модель блока датчиков угловой скорости;
10 - модель блока регуляторов;
11 - модель блока исполнительных устройств;
12 - модель космического аппарата обратных связей между каналами управления;
13 - модель блока датчиков угла;
14 - регулятор угла крена;
15 - регулятор угла рыскания;
16 - регулятор угла тангажа;
17 - первый сумматор;
18 - первый усилитель;
19 - второй сумматор;
20 - третий сумматор;
21 - второй усилитель;
22 - четвертый сумматор;
23 - пятый сумматор;
24 - шестой сумматор;
25 - седьмой сумматор;
26 - третий усилитель;
27 - четвертый усилитель;
28 - пятый усилитель;
29 - основная система управления;
30 - модельная система управления; 31 -шестой усилитель;
32 - седьмой усилитель;
33 - восьмой усилитель;
34 -девятый усилитель.
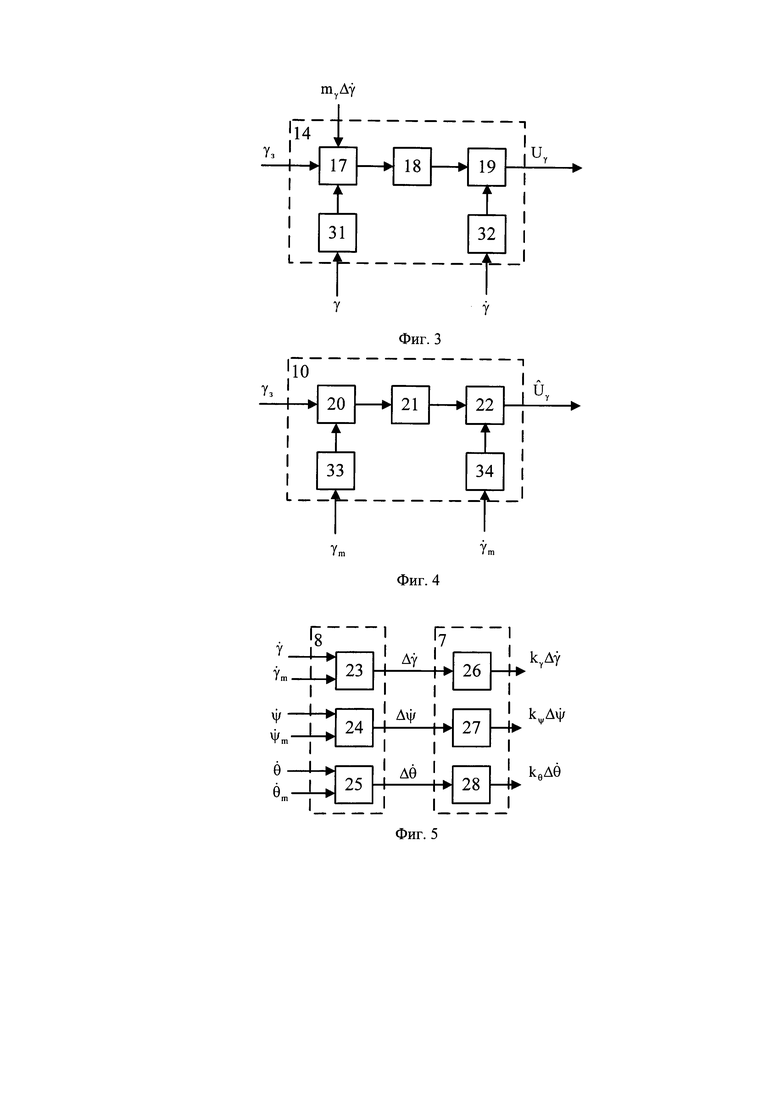
Блок регуляторов 2, изображенный на Фиг. 2, содержит регулятор угла крена 14, регулятор угла рыскания 15 и регулятор угла тангажа 16, которые имеют идентичные структуры. Структура регулятора угла крена у 14 изображена на фигуре 3 и содержит первый сумматор 17, первый усилитель 18 и второй сумматор 19.
Структура регулятора угла крена модели блока регуляторов 10 представлена на Фиг. 4, имеет аналогичную регулятору крена 14 структуру - последовательное соединение третьего сумматора 20, второго усилителя 21 и четвертого сумматора 22.
Блок сумматоров 8 содержит пятый 23, шестой 24 и седьмой 25 сумматор, включенные как указано на Фиг. 5. Блок сумматоров 8 соединен последовательно с блоком усилителей 7, состоящим из третьего 26, четвертого 27 и пятого 28 усилителей.
Для управления пространственной ориентацией космического аппарата необходимо иметь возможность отдельно управлять его положением по углам крена γ(t), рыскания ψ(t) , и тангажа θ(t). Для этого система управления 29 содержит три идентичные системы плоского управления соответственно по упомянутым углам.
При этом в системе управления 29 содержится три одинаковых по структуре канала управления, каждый из которых состоит из задатчика входного сигнала, регулятора, исполнительного устройства, датчика угла и датчика угловой скорости, см. стр. 226-227 [2].
На Фиг. 1 одномерные элементы упомянутых систем управления объединены в блоки: блок задатчиков угла 1, блок регуляторов 2, блок исполнительных устройств 3, блок датчиков угла 5 и блок датчиков угловой скорости 6, с векторными величинами на их выходах и входах.
В результате на выходе блока задатчиков угла 1 формируется вектор gз(t)=[γз(t), ψз(t), θз(t)], на выходе блока регуляторов 2 - вектор U(t)=[Uγ(t), Uψ(t), Uθ(t)], на выходе блока исполнительных устройств 3 - вектор  , на выходе блока датчиков угла 5 - вектор
, на выходе блока датчиков угла 5 - вектор  , а на выходе блока датчиков угловой скорости 6 - вектор
, а на выходе блока датчиков угловой скорости 6 - вектор

Структура блока регуляторов 2 однозначно определяется законами настройки по углам крена γ(t), рыскания ψ(t) и тангажа θ(t) соответственно

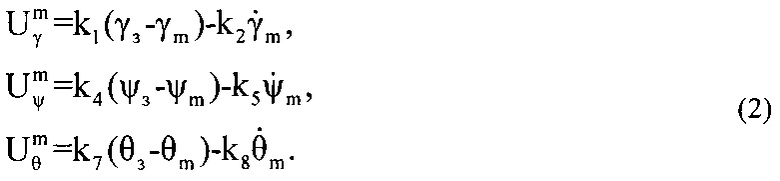
где Uγ(t), Uψ(t), Uθ(t) - управления по крену γ, рысканию ψ и тангажу θ;
k1 - k9 - коэффициенты усиления;
γз, ψз, θз - заданные входные значения углов крена, рыскания и тангажа соответственно;
γ, ψ, θ - текущие входные значения углов крена, рыскания и тангажа соответственно;
 - угловые скорости по крену, по рысканию, по тангажу соответственно;
- угловые скорости по крену, по рысканию, по тангажу соответственно;
 - модельные значения угловых скоростей по крену, по рысканию, по тангажу соответственно.
- модельные значения угловых скоростей по крену, по рысканию, по тангажу соответственно.
Структура модели блока регуляторов 10 не содержит последних составляющих в уравнении (1) и определена уравнениями
Реальный космический аппарат 4 описывается системой дифференциальных уравнений с перекрестными связями между каналами управления 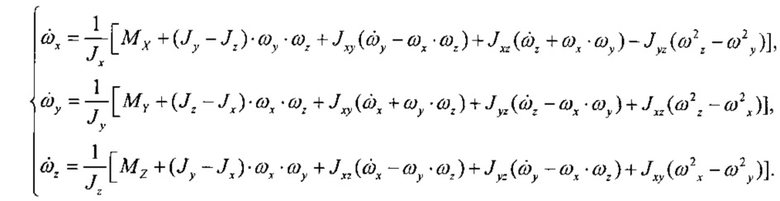 где Mi - проекции вектора суммарного момента, действующего на КА, на связанные оси, Н⋅м (i=x,y,z);
где Mi - проекции вектора суммарного момента, действующего на КА, на связанные оси, Н⋅м (i=x,y,z);
Jx, Jy, Jz - главные моменты инерции КА в связанных осях;
Jxy, Jxz, Jyz - центробежные моменты инерции КА;
ωх, ωу, ωz - проекции вектора абсолютной угловой скорости КА как твердого тела на связанные оси.
При малых отклонениях космического аппарата 4 от заданной ориентации имеют место равенства
Модель космического аппарата без перекрестных обратных связей 12 не содержит перекрестных обратных связей, поэтому динамика ее описывается уравнениями

На Фиг. 2 представлена структура блока регуляторов 2, на Фиг. 3 - регулятора 14 блока регуляторов 2, на Фиг. 4 - структура регулятора регулятора крена модели блока регуляторов 10, на Фиг. 5 - структура блока сумматоров 8, блока усилителей 7 и их соединения. Как видно из Фиг. 2 и Фиг. 4, структуры регуляторов блока регуляторов 2 имеют на один вход больше, чем структура регулятора регулятора крена модели блока регуляторов 10.
Аналогично блоку усилителей 7 блок исполнительных устройств 3 содержит три независимых исполнительных устройства. Такая же структура и у модели блока исполнительных устройств 11 (на фигурах не показана).
В результате на Фиг. 1 представлена структурная схема основной системы управления 29, содержащая блок датчиков угловой скорости 6 и последовательно соединенные блок регуляторов 2, блок исполнительных устройств 3, космический аппарат 4, блок датчиков угла 5, которые представляют собой три системы управления ориентацией по углам γ(t), ψ(t), θ(t).
Идентичная структура, содержащая модель блока регуляторов 10, модель блока исполнительных устройств 11, модель космического аппарата без перекрестных обратных связей 12, модель блока датчиков угла 13 и модель блока датчиков угловой скорости 9, представляет собой модельную систему управления 30.
При этом модель блока датчиков угла 9, модель блока датчиков угловой скорости 13 и модель блока исполнительных устройств 11 модельной системы управления 30 совпадают по структуре соответственно с блоком датчиков угла 5, блоком датчиков угловой скорости 6 и блоком исполнительных устройств 3 основной системы управления 29.
Функционирует система управления ориентацией, реализующая способ управления пространственным движением космического аппарата, следующим образом: с выхода блока задатчиков угла 1 формируется вектор gз(t), который поступает на векторные входы блока регуляторов 2 и модели блока регуляторов 10, на выходах которых формируются соответственно векторы управления
 и
и
Далее вектор управления U(t) поступает на блок исполнительных устройств 3, который формирует вектор управляющих моментов M(t), прикладываемых к космическому аппарату 4 с целью ориентации последнего в пространстве. При этом блоком датчиков угла 5 и блоком датчиков угловой скорости 6 измеряется соответственно вектор углов g(t) и вектор угловых скоростей .
.
Векторы g(t) и поступают на соответствующие входы блока регуляторов 2 и вместе с вектором входных углов ориентации gз(t) используются в блоке регуляторов 2 для формирования вектора управления U(t).
Аналогичным образом функционирует модельная система управления 30, при этом на выходе модели космического аппарата без перекрестных обратных связей 12 формируется модельный вектор gm(t), который измеряется моделью блоков датчиков 13, а вектор модельной угловой скорости измеряется моделью блока датчиков угловой скорости 9.
измеряется моделью блока датчиков угловой скорости 9.
Ввиду того, что на космический аппарат действуют мультипликативная помеха F(t), которая изменяет параметры дифференциального уравнения, описывающего его ориентацию в пространстве, а также аддитивная внешняя помеха f(t), то выходы космического аппарата 4 g(t) и нe будут равны соответственно gm(t) и , так как F(t) и f(t) на модель космического аппарата без перекрестных обратных связей 12 не действуют.
, так как F(t) и f(t) на модель космического аппарата без перекрестных обратных связей 12 не действуют.
Наличие перекрестных обратных связей в реальном космическом аппарате 4 приводит к взаимозависимости переходных процессов. Изменение ориентации по одному углу приводит к возникновению колебаний значениий других углов. Другими словами, каналы управления неавтономны.
Модель космического аппарата без перекрестных обратных связей 12 не имеет перекрестных обратных связей, поэтому управления ориентацией по углам γ(t), ψ(t) и θ(t) в ней автономны.
Для коррекции основной системы управления 29 используется блок сумматоров 8 и блок усилителей 9 (Фиг. 5). Вектор выходных сигналов блока сумматоров 8 формирует вектор разности , который усиливается в блоке усилителей 7, на выходе которого получается сигнал
, который усиливается в блоке усилителей 7, на выходе которого получается сигнал 
где kγ, kψ, kθ- соответственно коэффициенты усиления третьего усилителя 26, четвертого усилителя 27 и пятого усилителя 28.
При этом для получения сигнала Δg(t) используются измерения блока датчиков угловой скорости 6 и модели блока датчиков угловой скорости 9.
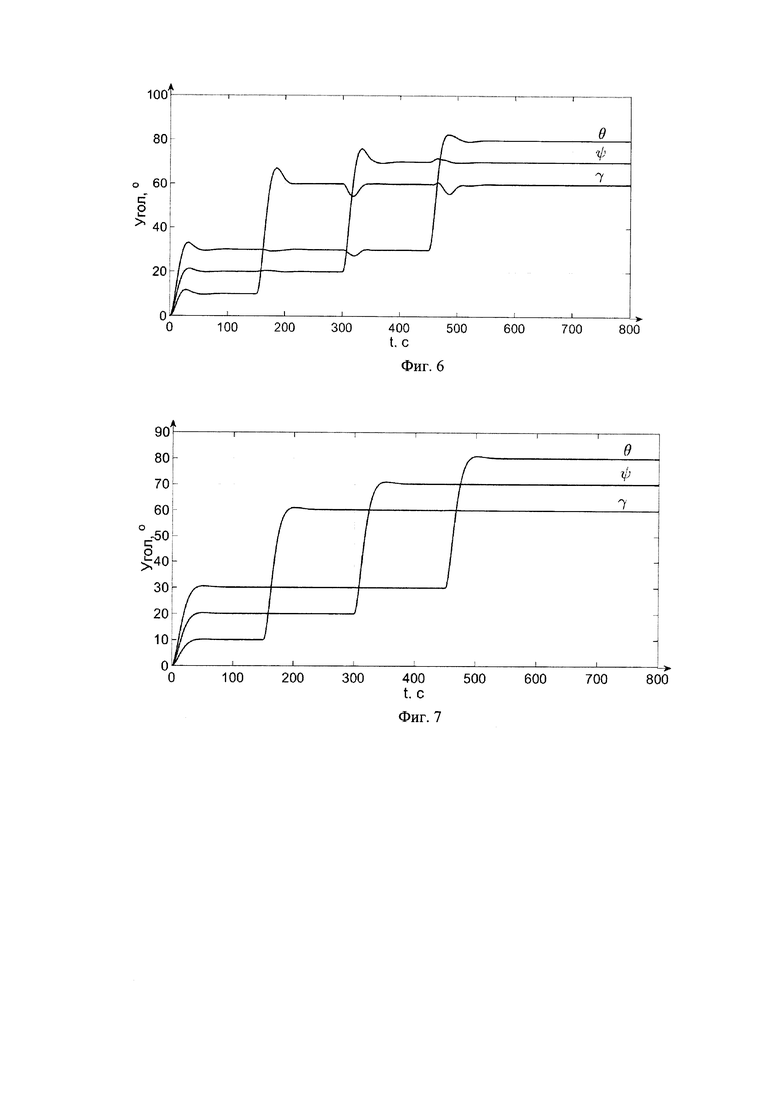
На Фиг. 6 приведены переходные процессы в известной системе управления 29 без коррекции (3), а на Фиг. 7 - переходные процессы в системе управления 29 с коррекцией (3).
Система управления ориентацией реализует предложенный способ.
Действительно, вектор входных углов ориентации формируется блоком задатчиков угла ориентации 1, вектор выходных углов ориентации измеряется блоком датчиков угла 5, вектор выходных угловых скоростей измеряется блоком датчиков угловой скорости 6, вектор сигналов управления формируется блоком регуляторов 2.
Эталонный вектор угловых скоростей ориентацией измеряется моделью блока датчиков угловой скорости 9. Далее определяют вектор сигнала разности эталонного вектора угловых скоростей ориентации и вектора выходных угловых скоростей ориентации путем их алгебраического суммирования в блоке сумматоров 8, усиливают вектор сигналов разности в блоке усилителей 7 (Фиг. 5.) и суммируют с вектором управления в блоке регуляторов 2.
Результаты моделирования переходных процессов в известной системе, приведенные на Фиг. 6, показывают взаимовлияние управления ориентацией космического аппарата при отдельных управлениях по углу крена γ(t) на 150 секунде, по углу рыскания ψ(t) на 300 секунде и по углу тангажа θ(t) на 450 секунде. Как видно на фигуре 6, наибольшее взаимовлияние перекрестных связей наблюдается при управлении ориентацией по углу тангажа θ(t).
Кроме того, переходные процессы по углу крена γ(t), по углу рыскания ψ(t) и по углу тангажа θ(t) колебательные, что приводит к значительным энергозатратам на управления ориентацией.
На Фиг. 7 приведены результаты моделирования предложенного технического решения при тех же параметрах системы, что и на фигуре 6, на которой видно, что взаимовлияние при управлении ориентации космического аппарата отдельно по каналам крена γ(t), рыскания ψ(t) и тангажа θ(t) практически отсутствует, а сами переходные процессы являются монотонными, уменьшается в 2 раза время переходных процессов. В результате повышается точность ориентации и снижаются энергозатраты на управления.
Таким образом, технический результат от использования изобретения заключается в повышении качества переходных процессов, точности управления и уменьшении энергозатрат на управление ориентацией космического аппарата.
Изобретательский уровень предложенного технического решения задачи по управлению ориентацией космического аппарата подтверждается отличительными частями формулы изобретения на способ и систему управления ориентацией космического аппарата.
Литература
1. Бортовые системы управления космическими аппаратами. Учебное пособие / Бровкин А. Г., Бурдыгов Б. Г. и др. Под ред. Сырова А. С.-М.: Изд. МАИ-ПРИНТ, 2010, стр. 146 (прототип).
2. Алексеев К. Б., Бебенин Г. Г. Управление космическим летательным аппаратом. - М.: Машиностроение, 1964, стр. 266-267.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ГРУБОГО УПРАВЛЕНИЯ ПРОСТРАНСТВЕННЫМ ДВИЖЕНИЕМ САМОЛЕТА И СИСТЕМА ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2587773C2 |
| СИСТЕМА УПРАВЛЕНИЯ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИЕЙ КОСМИЧЕСКОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ БЕСПЛАТФОРМЕННОГО ОРБИТАЛЬНОГО ГИРОКОМПАСА | 2015 |
|
RU2597015C1 |
| СПОСОБ УПРАВЛЕНИЯ ДАТЧИКОМ ИНФРАКРАСНОЙ ВЕРТИКАЛИ ЗЕМЛИ С АВТОПОДСТРОЙКОЙ УГЛА КРУГОВОГО СКАНИРОВАНИЯ | 2023 |
|
RU2814305C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЕКТОРА УГЛОВОЙ СКОРОСТИ КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2519603C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА В ПРОСТРАНСТВЕ С ИСПОЛЬЗОВАНИЕМ ОРБИТАЛЬНОГО ГИРОКОМПАСА | 2012 |
|
RU2509690C1 |
| БЕСПЛАТФОРМЕННЫЙ ОРБИТАЛЬНЫЙ ГИРОКОМПАС С ПРОИЗВОЛЬНОЙ КУРСОВОЙ ОРИЕНТАЦИЕЙ КОСМИЧЕСКОГО АППАРАТА | 2011 |
|
RU2488774C1 |
| СПОСОБ ОРБИТАЛЬНОГО ГИРОКОМПАСИРОВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2583350C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА С УПРАВЛЯЕМОЙ ОРИЕНТАЦИЕЙ | 2017 |
|
RU2669481C1 |
| СПОСОБ УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА СО СТАТИЧЕСКИМ ПРИВОДОМ | 2007 |
|
RU2335009C1 |
| СИСТЕМА УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА СО СТАТИЧЕСКИМ ПРИВОДОМ | 2007 |
|
RU2335006C1 |
Группа изобретений относится к космической технике. В способе управления ориентацией КА в пространстве формируют эталонный вектор выходных угловых скоростей ориентации, усиливают вектор выходных угловых скоростей ориентации и суммируют его с вектором сигналов управления. Система управления ориентацией КА содержит модель блока регуляторов, модель блока исполнительных устройств, модель КА без перекрестных обратных связей, модель блока датчиков угла, модель блока датчиков угловой скорости, блок усилителей, блок сумматоров, выход блока задатчиков угла через последовательно соединенные модель блока регуляторов, модель блока исполнительных устройств, модель космического аппарата без перекрестных обратных связей, модель блока датчиков угловой скорости. Блок сумматоров и блок усилителей соединен с четвертым входом блока регуляторов, выход модели блока датчиков угла соединен со вторым входом модели блока регуляторов, третий вход которого соединен с выходом модели блока датчиков угловой скорости. Техническим результатом группы изобретений является повышение точности управления ориентацией, качества переходных процессов и уменьшение энергозатрат на управление ориентацией. 2 н.п. ф-лы, 7 ил.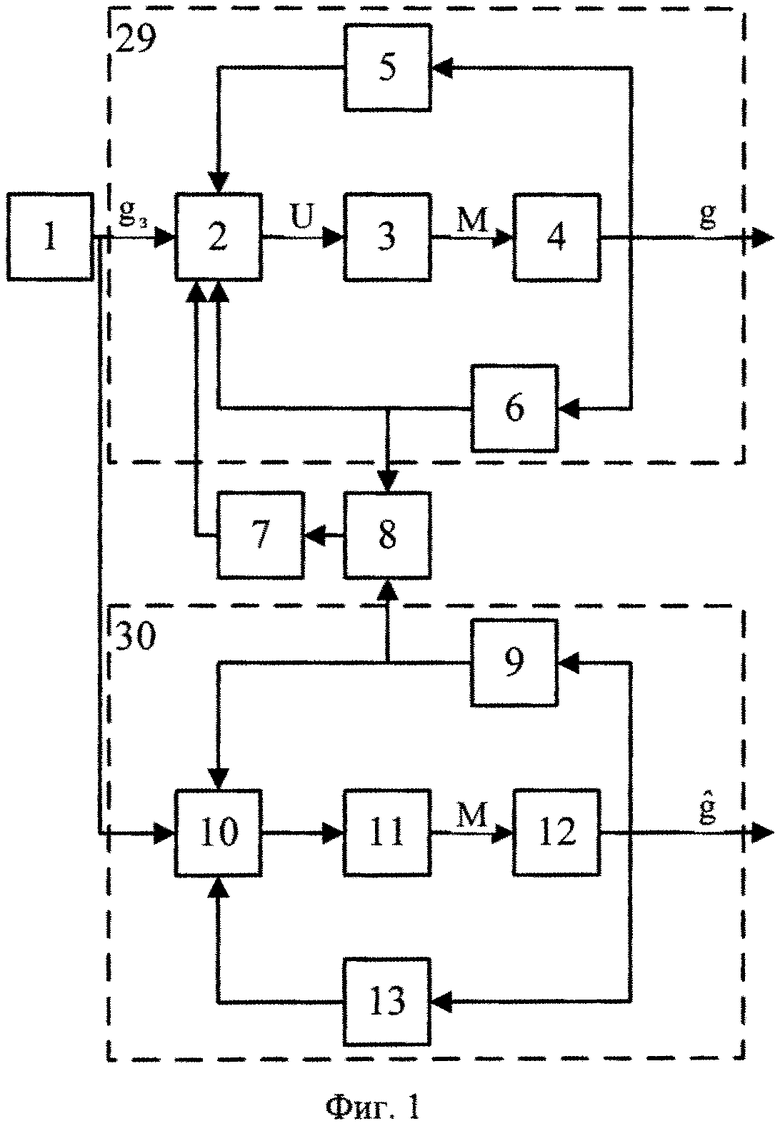
1. Способ управления пространственной ориентацией космического аппарата, заключающийся в задании вектора входных углов ориентации, измерении вектора выходных углов ориентации, измерении вектора выходных угловых скоростей ориентации и формировании вектора сигналов управления, отличающийся тем, что формируют эталонный вектор выходных угловых скоростей ориентации, определяют вектор сигналов разности эталонного вектора выходных угловых скоростей ориентации и вектора выходных угловых скоростей ориентации, усиливают вектор сигналов разности и суммируют его с вектором сигналов управления.
2. Система управления пространственной ориентацией космического аппарата, содержащая последовательно соединенный блок задатчиков угла ориентации, блок регуляторов, блок исполнительных устройств, космический аппарат и блок датчиков угла, выход которого соединен со вторым входом блока регуляторов, выход космического аппарата через блок датчиков угловой скорости соединен с третьим входом блока регуляторов, отличающаяся тем, что она дополнительно содержит модель блока регуляторов, модель блока исполнительных устройств, модель космического аппарата без перекрестных обратных связей, модель блока датчиков угла, модель блока датчиков угловой скорости, блок усилителей, блок сумматоров, выход блока задатчиков угла через последовательно соединенные модель блока регуляторов, модель блока исполнительных устройств, модель космического аппарата без перекрестных обратных связей, модель блока датчиков угловой скорости, блок сумматоров и блок усилителей соединен с четвертым входом блока регуляторов, выход модели блока датчиков угла соединен со вторым входом модели блока регуляторов, третий вход которого соединен с выходом модели блока датчиков угловой скорости.
| Бровкин А.Г | |||
| и др | |||
| Бортовые системы управления космическими аппаратами | |||
| -М.: МАИ-ПРИНТ, 2010 | |||
| с | |||
| Крутильная машина для веревок и проч. | 1922 |
|
SU143A1 |
| СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2536010C1 |
| СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКИХ АППАРАТОВ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2007 |
|
RU2375269C2 |
| US 5996941 A1, 07.12.1999. | |||

