Изобретение относится к космической технике, в частности к технике энергосберегающих систем управления ориентацией космических аппаратов (КА), преимущественно для малых космических аппаратов (МКА).
Известен способ ориентации КА, включающий измерение параметров углового движения КА, формирование и выдачу на исполнительные органы управляющих сигналов, пропорциональных отклонению от заданных параметров движения [1].
Этот способ реализуется устройством для обеспечения ориентации КА, содержащим бортовую цифровую вычислительную машину (БЦВМ) с подключенными к ней датчиками для определения параметров движения КА. Рассчитываемые в БЦВМ сигналы управления преобразуются в блоке согласования и поступают на исполнительные органы (ИО) системы ориентации [1].
Недостатками такого способа, реализованного известным устройством, являются большой вес и энергопотребление системами управления ориентацией КА.
Известен также способ управления ориентацией КА, включающий измерение параметров углового движения КА, формирование и выдачу на ИО управляющих сигналов, пропорциональных отклонению от заданных параметров, прекращение управления на участках, не требующих ориентации КА (например, на участках выращивания кристаллов для исключения микроускорений от работы ИО) с возобновлением ориентации по командам управления с наземного комплекса управления.
Этот способ реализуется устройством, содержащим вычислительное устройство (ВУ), измерители угловой скорости (ИУС), датчики внешней информации (например, инфракрасный построитель местной вертикали (ИКПМВ), астродатчик, солнечный датчик) и исполнительные органы (например, газореактивные двигатели, электродвигатели-маховики и т.д.) [2] (прототип).
Одним из основных потребителей электроэнергии на борту КА является система управления ориентацией. Чем больше энергопотребление системы, тем больше должны быть панели солнечных батарей (ПСБ) и аккумуляторные батареи (АБ). Увеличение площади ПСБ приводит к увеличению веса, возмущающих моментов, действующих на КА, и силы лобового сопротивления, для компенсации которых (без компенсации силы лобового сопротивления сокращается время активного существования КА) требуется дополнительный расход рабочего тела на поддержание орбиты и ориентации КА в заданном положении или дополнительное увеличение энергопотребления для магнитной системы сброса кинетического момента при использовании для управления угловым движением КА инерционных исполнительных органов (ИО) (электродвигателей-маховиков (ЭДМ), силовых гироскопических комплексов (СГК)), т.е. также к увеличению веса и стоимости КА. Особенно это важно для малых космических аппаратов, работающих на низких орбитах (ниже 500 км).
При эксплуатации бортовая аппаратура (БА) КА подвергается воздействию ионизирующих излучений заряженных частиц естественного радиационного поля Земли (ЕРПЗ), галактических и солнечных космических лучей (ГЛК и СКЛ). Радиационная стойкость аппаратуры определяет в основном ее срок активного существования (САС) и вероятность безотказной работы.
Воздействие ионизирующих излучений приводит к накоплению заряда в КМОП - структуре интегральных микросхем (ИНС). Параметрический или функциональный отказ ИМС наступает при достижении предельной накопленной дозы (ПНД), определяющей ее радиационную стойкость. В ИМС под воздействием радиации в каждый момент времени происходит накопление заряда и его релаксация. На величину ПНД существенно влияет локальное электрическое поле в структуре ИМС, задерживающее процесс релаксации. В выключенном состоянии накопление заряда происходит медленнее, так как электрическое поле отсутствует и не препятствует релаксации заряда [3]. В связи с этим ПНД во включенном состоянии бортовой аппаратуры на участках работы с поддержанием требуемой ориентации КА оказывается в несколько раз ниже. А это приводит к соответствующему уменьшению срока активного существования и вероятности безотказной работы БА КА.
Таким образом, недостатками этого способа, реализованного известным устройством, являются большой вес, энергопотребление и высокая стоимость системы управления ориентацией КА, малая продолжительность работы бортовой аппаратуры и вероятность ее безотказной работы.
Задачей настоящего изобретения является уменьшение веса, стоимости, энергопотребления систем управления ориентацией КА, увеличение времени активного существования и вероятности безотказной работы бортовой аппаратуры.
Поставленная задача решается тем, что в способе ориентации космических аппаратов, включающем измерение параметров углового движения, формирование и выдачу на исполнительные органы управляющих сигналов, пропорциональных отклонению от заданных параметров, обеспечивают циклический расчет моментов времени последующих циклов формирования и выдачи управляющих сигналов на исполнительные органы для обеспечения требуемой ориентации, включают аппаратуру ждущего и выключают аппаратуру штатного режимов работы системы ориентации, отсчитывают время и при совпадении текущего времени с расчетным временем последующего цикла включают аппаратуру штатного и выключают аппаратуру ждущего режимов работы, измеряют параметры углового движения, формируют и выдают на исполнительные органы управляющие сигналы.
Этот способ реализуется устройством, представляющем, например, бесплатформенную инерциальную систему управления, содержащим центральный блок управления, измерители угловой скорости, датчики внешней информации и исполнительные органы, введены программно-временное устройство, первыми входом и выходом связанное с центральным блоком управления, вторым и третьим выходами с третьими входами блоков управления измерителей угловой скорости и датчиков внешней информации, четвертым выходом со вторыми входами блоков управления исполнительных органов, первыми входами подключенных к центральному блоку управления, а выходами к исполнительным органам, блок управления измерителей угловой скорости первыми входом и выходом соединенный с центральным блоком управления, вторыми входом и выходом с измерителем угловой скорости, блоки управления датчиками внешней информации первыми входом и выходом присоединенные к центральному блоку управления, вторыми входом и выходом к датчикам внешней информации.
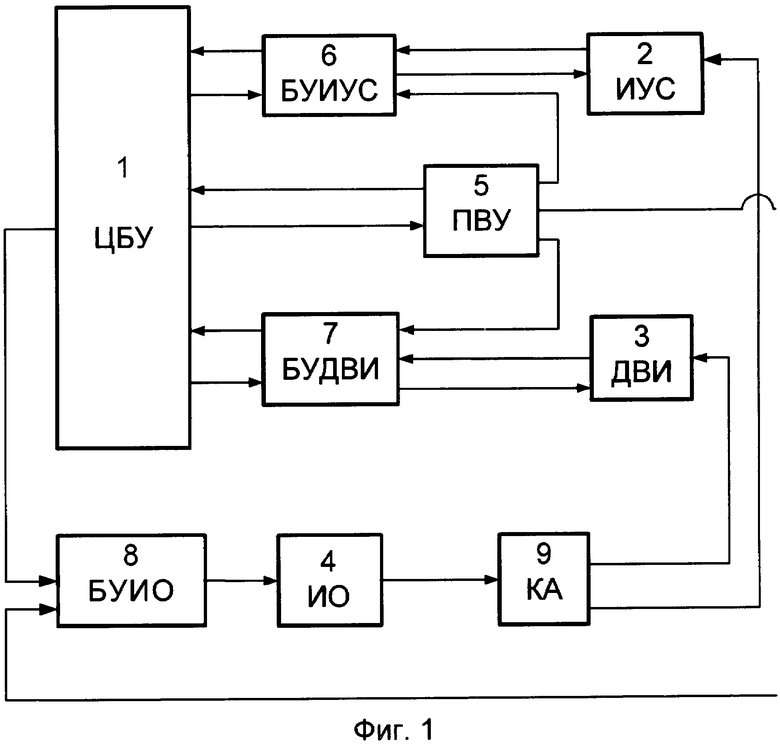
На фиг.1 приведена функциональная блок-схема устройства для осуществления способа.
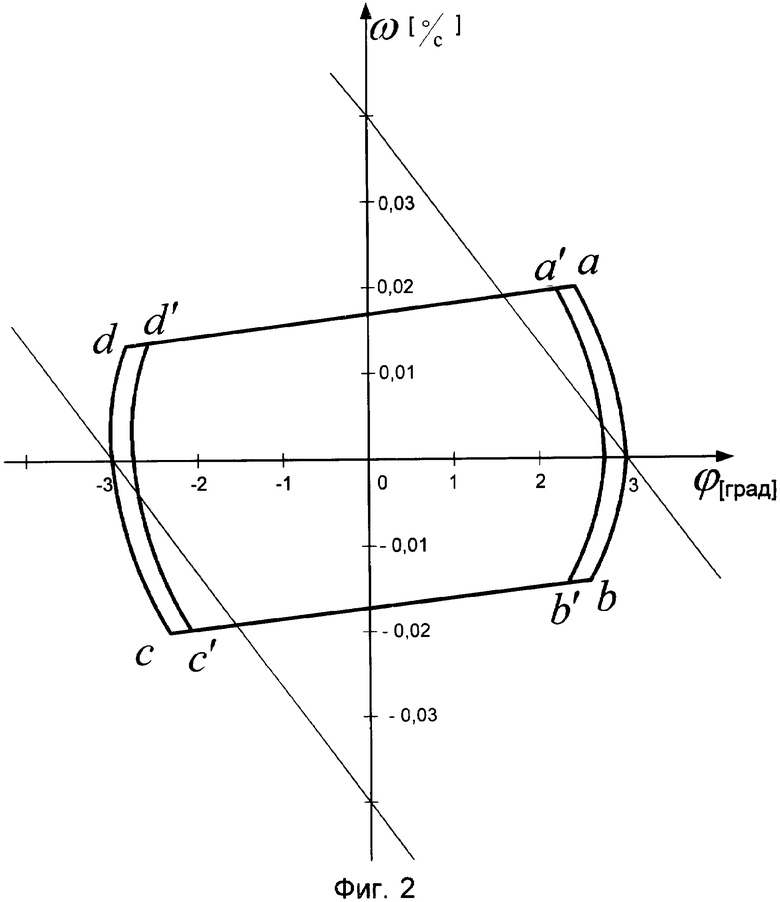
На фиг.2 представлено угловое движение КА в процессе стабилизации на фазовой плоскости.
Устройство включает центральный блок управления (1), измерители угловой скорости (2), датчики внешней информации (3) и исполнительные органы (реактивные двигатели, электродвигатели-маховики, силовые гироскопы) (4), программно-временное устройство (5), первыми входом и выходом связанное с центральным блоком управления (1), вторым и третьим выходами с третьими входами блоков управления измерителей угловой скорости (6) и блоком управления датчиков внешней информации (7), четвертым выходом со вторыми входами блоков управления исполнительных органов (8), первыми входами подключенных к центральному блоку управления (1), а выходами к исполнительным органам (4), блок управления измерителей угловой скорости (6), первыми входом и выходом соединенный с центральным блоком управления, вторыми входом и выходом - с измерителем угловой скорости (2), блоки управления датчиками внешней информацией (7), первыми входом и выходом присоединенные к центральному блоку управления, вторыми входом и выходом - к датчикам внешней информации (3).
Устройство работает следующим образом. При первоначальном включении, например, по контакту отделения КА от последней ступени ракеты-носителя включается центральный блок управления (ЦБУ (1)), блок управления измерителей угловой скорости (БУИУС (6)) и блок управления датчиков внешней информации (БУДВИ (7)). БУИУС (6) и БУДВИ (7) включают измерители угловой скорости (ИУС (2)), датчики внешней информации (ДВИ (3)) и с заданной дискретностью обеспечивают съем и запоминание информации с приборов ИУС (2) и ДВИ (3). ЦБУ (1) через заданный интервал времени (задается исходя из интервала времени, необходимого для включения и съема требуемого объема информации с приборов ИУС (2) и ДВИ (3)) пересылает информацию в "память" ЦБУ (1) и выдает команду на выключение БУИУС (6) и БУДВИ (7). По команде выключения из ЦБУ (1) БУИУС (6) и БУДВИ (7) выключают ИУС (2) и ДВИ (3), если в системе используются датчики со временем подготовки к работе, меньшем чем продолжительность текущего цикла работы системы или не выключают датчики, если продолжительность подготовки соответствующих датчиков к работе больше продолжительности текущего цикла работы системы и выключаются сами. ЦБУ (1) после перезаписи информации из БУИУС (6) и БУДВИ (7) рассчитывает по полученной информации исходные данные на ИО (4), включает БУИО (8) и выдает в БУИО (8) исходные данные для обеспечения работы ИО (4). В составе исходных данных в БУИО (8) задаются, например, при использовании в качестве ИО (4) реактивных двигателей или электродвигателей-маховиков, время выключения ИО (4). При использовании в качестве ИО (4) силовых гироскопов в составе исходных данных задаются скорости прецессии роторов гироскопов и время прекращения разворота с указанной скоростью прецессии, а также направление и величина тока в катушках электромагнитного устройства (ЭМУ) для сброса накопленного кинетического момента. ЦБУ (1) рассчитывает также момент времени включения системы на следующем цикле работы, включает ПВУ (5), задает рассчитанный момент времени включения системы, моменты времени выключения ИО (4) и включения необходимых для работы на следующем цикле ИУС (2) и ДВИ (3) в ПВУ (5) и выключается.
БУИО (8) по исходным данным, полученным из ЦБУ (1), включает ИО (4) и выключается. Выключение ИО (4) через БУИО (8) обеспечивает ПВУ (5) по исходным данным, полученным из ЦБУ (1) при моменте времени выключения ИО (4), меньшем момента времени включения ЦБУ (1) на следующем цикле работы системы или ЦБУ (1) при времени выключения ИО (4) на интервале работы ЦБУ (1) и выключенном ПВУ (5).
На этом работа системы на текущем цикле завершается до включения ее на последующем цикле работы, начало которого определяется моментом времени, рассчитанным в ЦБУ (1).
Далее циклическая работа системы управления ориентацией КА будет продолжаться, отличаясь от первоначального включения только тем, что включение ИУС (2) и ДВИ (3) (если они выключены) для подготовки к работе перед включением ЦБУ (1) и включение ЦБУ (1) будет производиться из ПВУ (5).
Система управления ориентацией должна обеспечивать стабилизацию КА относительно оцениваемых по информации с ДВИ (3), (магнитометры, СД) и ИУС (2) положения с погрешностью не более 3 градусов и угловой скорости с погрешностью не более 0,02°/сек.
Угловое движение КА в процессе стабилизации представим на фазовой плоскости (фиг.2).
При известном способе управления ориентацией КА БА системы ориентации включена постоянно. ЦБУ с выбранной при проектировании системы ориентации дискретностью (0,1-1) сек осуществляет съем информации с ИУС и ДВИ оценивает параметры углового движения КА известным способом. При отклонении углового положения КА от заданного (точки а, с на фиг.2) ЦБУ формирует управляющие сигналы на ИО, которые обеспечивают изменение угловой скорости КА и соответственно удержание КА в заданной зоне ±3 градуса (точки а-в-с на фиг.2), при этом осуществляется сброс кинетического момента ИО с помощью постоянно включенного электромагнитного устройства. Переключение (изменение направления тока в катушках) электромеханического устройства в режиме стабилизации производится не реже четырех раз на витке.
Так как в известном способе ориентации БА системы ориентации включена постоянно, то за время разворота КА из положения а' в положение с' (фиг.2) будет затрачена определенная энергия
Q=(PΣ+Pэму)T,
где Рэму - мощность, постоянно потребляемая ЭМУ;
РΣ - мощность, потребляемая БА за исключением ЭМУ;
Т - интервал времени движения КА из положения а' в положение с'' (фиг.2).
При работе системы ориентации КА по предлагаемому способу на интервалах включения ЦБУ (1) в процессе движения между точками а' и а (с' и с) по информации с ИУС (2) и ДВИ (3) определяются моменты времени переключения ИО (4) и текущие значения параметров углового движения КА известным способом. Рассчитывается длительность включения привода ИО (4) и длительность разворота КА из положения а в положение b в соответствии с выражениями
где
τэдм - продолжительность включения ЭДМ;
ωиз - измеренная угловая скорость в точке а′;
ωц - расчетное значение скорости на цикле стабилизации (≤0,02°/с);
ε - расчетное (оцененное) значение ускорения КА при включении привода ИО;
γа' - текущее угловое положение КА;
γc' - расчетное угловое положение КА, при котором должен быть включен ЦБУ (1).
Поскольку расчет длительности разворота КА из положения а′ в положение с′ производится по измеренным или проектным параметрам ωиз, ωц, ε, то эту длительность уменьшим на величину, пропорциональную погрешностям указанных параметров, или на некоторую фиксированную величину, например (5÷10)% от максимального отклонения, с целью гарантированного включения ЦБУ (1) до разворота КА в точку а (фиг.2).
После расчета указанных длительностей ЦБУ (1) включает ПВУ (5), задает в ПВУ (5) моменты времени включения ЦБУ (1), ИУС (2), ДВИ (3), рассчитанные в соответствии с выражениями
tцбу=t+τa′-в′-с′,
tиус=tцбу-τиус,
tдви=tцбу-tдви,
и момент времени выключения ИО, рассчитанный в соответствии с выражением
tио=t+τэдм,
где t - текущее время;
τиус - время подготовки к работе ИУС (2);
τдви - время подготовки к работе ДВИ (3).
После задания моментов времени выключения ИO (4) и включения ИУС(2), ДВИ (3) ЦБУ (1) выключается. Далее в процессе углового движения КА из точки а′ к точке с′ из состава БА, работающей в режиме стабилизации КА, функционирует только ПВУ (5). ПВУ (5) считает текущее время и сравнивает его с заданными моментами времени из ЦБУ (1). При совпадении указанных времен ПВУ (5) выдает команды на выключение ИO (4) и включение ИУС (2), ДВИ (3) и ЦБУ (1) для работы на следующем цикле.
Так как в предложенном способе управления ориентацией БА включается только на интервале времени (не превышает 2 сек), необходимом для подготовки аппаратуры к работе, съема информации и расчета моментов времени ее включения на последующем цикле, а на остальном интервале времени текущего цикла работает только ПВУ (5) и ИО(ЭМУ) (4), то за время разворота КА из положения а′ в положение с′ будет затрачена энергия
Qn=PΣ2сек+Pпву(T-2сек)+PэмуT,
где
Рпву - мощность потребления ПВУ (5).
Продолжительность углового перемещения КА от точки а′ к точке с′ при принятых значениях допустимого углового отклонения (3°, минус 10%) 2,7° и скорости на цикле 0,02°/с будет не менее величины, равной
Определим теперь для рассматриваемой системы ориентации экономию электропотребления, получаемую при ориентации по предлагаемому способу по отношению к известному в соответствии с выражением

С учетом приведенных выше значений электропотребления БА электропотребление системы ориентации, работающей по предлагаемому способу, по сравнению с известным составит не более 18,3%, т.е. почти в 6 раз меньше и примерно равно суммарному потреблению ИО(ЭМУ) (4) и ПВУ (5), отношение же продолжительности интервалов времени с выключенной БА по отношению к интервалам времени с включенной БА составит 135.
Для систем управления ориентацией КА с более высокой точностью ориентации чем в рассмотренном примере использование предлагаемого способа управления ориентацией за длительность цикла можно принять как интервал времени, за который КА разворачивается из точки а′ в точку с′ (а′→с′), так и интервал времени движения КА, включающий несколько циклов (а′→с′).
При этом в ПВУ (5) из ЦБУ (1) необходимо задавать моменты включения и выключения ИO (4) в точках а′, в′-с′, d′ и длительности включения ИО(ЭМУ) (4), рассчитанные в соответствии с выражением
где
 - уточняемое известным способом при включениях ИУС (2) значение скорости на цикле.
- уточняемое известным способом при включениях ИУС (2) значение скорости на цикле.
Т.е. на выбранном цикле осуществить программное управление по возмущению.
Таким образом, предлагаемый способ ориентации и реализующее его устройство позволяют в несколько раз уменьшить электропотребление БА обеспечивающей ориентацию КА и тем самым уменьшить вес и стоимость КА. Кроме того, при ориентации БА большую часть времени будет находиться в выключенном состоянии, что позволит в несколько раз увеличить предельную накопленную дозу и соответствующее увеличение срока активного существования и вероятность безотказной работы БА КА.
Литература
[1] "Управление ориентацией космических аппаратов" Б.В.Раушенбах, Е.Н.Токарь. М.: Наука, 1974, стр.14-32, 102 (аналог).
[2] Модернизация системы управления движением космических аппаратов "Фотон", "Бион", Ю.Г.Антонов, А.А.Головченко, С.Н.Платонов, Б.К.Сучков, Ю.К.Пылаев - Х Санкт-Петербургская международная конференция по интегрированным навигационным системам, ГНЦ РФ-ЦНИИ "Электроприбор", 2003, стр.77-82 (прототип).
[3] Повышение радиационной стойкости индустриальных средств автоматики в составе бортовой аппаратуры, Олег Горчанский, Виктор Попов, Юрий Николаев //Современные технологии автоматизации №4, 2001 г. - www.cta.ru.
[4] VG035 Техническое описание, инструкция по эксплуатации - www.fizoptika.ru.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКИХ АППАРАТОВ И УСТРОЙСТВО ЕГО РЕАЛИЗУЮЩЕЕ | 2014 |
|
RU2565426C2 |
| СПОСОБ ОРИЕНТАЦИИ ЦЕЛЕВОЙ АППАРАТУРЫ КОСМИЧЕСКИХ АППАРАТОВ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2009 |
|
RU2412873C1 |
| СПОСОБ КАЛИБРОВКИ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ БЕСПЛАТФОРМЕННЫХ ИНЕРЦИАЛЬНЫХ СИСТЕМ ОРИЕНТАЦИИ КОСМИЧЕСКИХ АППАРАТОВ И УСТРОЙСТВО ЕГО РЕАЛИЗУЮЩЕЕ | 2011 |
|
RU2466068C1 |
| СПОСОБ ОТРАБОТКИ СИСТЕМ УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ КОСМИЧЕСКИХ АППАРАТОВ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2001 |
|
RU2207309C2 |
| СПОСОБ АВТОМАТИЧЕСКОЙ КОМПЕНСАЦИИ ОШИБОК БЕСПЛАТФОРМЕННОЙ СИСТЕМЫ ОРИЕНТАЦИИ В СИСТЕМЕ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ КОСМИЧЕСКИХ АППАРАТОВ, И УСТРОЙСТВО, РЕАЛИЗУЮЩЕЕ ЭТОТ СПОСОБ | 2012 |
|
RU2517018C2 |
| СПОСОБ ОТРАБОТКИ СИСТЕМ УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ КОСМИЧЕСКИХ АППАРАТОВ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2004 |
|
RU2271971C1 |
| СИСТЕМА УПРАВЛЕНИЯ, СБОРА И ОБРАБОТКИ ДАННЫХ С БОРТОВОЙ РЕГИСТРИРУЮЩЕЙ АППАРАТУРЫ КОСМИЧЕСКОГО АППАРАТА | 2012 |
|
RU2498399C1 |
| Способ управления космическим аппаратом | 2020 |
|
RU2735655C1 |
| СПОСОБ ТЕРМОРЕГУЛИРОВАНИЯ БОРТОВОЙ АППАРАТУРЫ КОСМИЧЕСКОГО АППАРАТА | 2005 |
|
RU2304071C2 |
| СИСТЕМА УПРАВЛЕНИЯ РАЗМЕЩЕННОЙ НА КОСМИЧЕСКОМ КОРАБЛЕ ПЕРЕНОСНОЙ АППАРАТУРОЙ НАБЛЮДЕНИЯ | 2019 |
|
RU2725012C1 |
Изобретения относятся к области управления движением космических аппаратов (КА), преимущественно малых КА, где эффективны энергосберегающие системы управления ориентацией. Способ включает измерение параметров углового движения КА, формирование и выдачу на исполнительные органы управляющих сигналов. При этом обеспечивают циклический расчет моментов времени последующих циклов формирования и выдачи управляющих сигналов КА. На период отсчета текущего времени включают аппаратуру ждущего и выключают аппаратуру штатного режимов работы системы ориентации. При совпадении текущего времени с расчетным временем последующего цикла включают аппаратуру штатного и выключают аппаратуру ждущего режимов работы. Измеряют параметры углового движения КА, формируют и выдают на исполнительные органы необходимые управляющие сигналы. Устройство ориентации КА может быть выполнено, например, в виде бесплатформенной инерциальной системы управления. Оно содержит центральный блок управления, измерители угловой скорости, датчики внешней информации и исполнительные органы. В него дополнительно введены блоки управления измерителей угловой скорости, блоки управления датчиками внешней информации и программно-временное устройство. Данные блоки и устройство соединены друг с другом и остальными элементами системы управления в соответствии с реализуемым способом. Технический результат изобретений состоит в уменьшении времени работы аппаратуры штатного режима и тем самым - снижении электропотребления системы управления, чем, в свою очередь, увеличивается срок активного существования и вероятность безотказной работы бортовой аппаратуры. 2 н.п. ф-лы, 2 ил.
1. Способ ориентации космических аппаратов, включающий измерение параметров углового движения, формирование и выдачу на исполнительные органы управляющих сигналов, пропорциональных отклонению от заданных параметров, отличающийся тем, что обеспечивают циклический расчет моментов времени последующих циклов формирования и выдачи управляющих сигналов на исполнительные органы для обеспечения требуемой ориентации космического аппарата, включают аппаратуру ждущего и выключают аппаратуру штатного режимов работы системы ориентации, отсчитывают время и при совпадении текущего времени с расчетным временем последующего цикла включают аппаратуру штатного и выключают аппаратуру ждущего режимов работы, измеряют параметры углового движения аппарата, формируют и выдают на исполнительные органы управляющие сигналы.
2. Устройство ориентации космических аппаратов, например, в виде бесплатформенной инерциальной системы управления, содержащее центральный блок управления, измерители угловой скорости, датчики внешней информации и исполнительные органы, отличающееся тем, что в него введены программно-временное устройство, первыми входом и выходом связанное с центральным блоком управления, вторым и третьим выходами - с третьими входами блоков управления измерителей угловой скорости и датчиков внешней информации, четвертым выходом - со вторыми входами блоков управления исполнительных органов, первыми входами подключенных к центральному блоку управления, а выходами - к исполнительным органам, блоки управления измерителей угловой скорости, причем блок соответствующего измерителя угловой скорости первыми входом и выходом соединен с центральным блоком управления, вторыми входом и выходом - с измерителем угловой скорости, блоки управления датчиками внешней информации, первыми входом и выходом присоединенные к центральному блоку управления, а вторыми входом и выходом - к датчикам внешней информации.
| ГАНТОНОВ Ю.Г., ГОЛОВЧЕНКО А.А | |||
| и др | |||
| Модернизация системы управления движением космических аппаратов "Фотон", "Бион" | |||
| Х Санкт-Петербургская международная конференция по интегрированным навигационным системам, ГНЦ РФ-ЦНИИ "Электроприбор", 2003, с.77-82 | |||
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ С ПОМОЩЬЮ СИЛОВЫХ ГИРОСКОПОВ И РЕАКТИВНЫХ ДВИГАТЕЛЕЙ, РАСПОЛОЖЕННЫХ ПОД УГЛОМ К ОСЯМ СВЯЗАННОГО БАЗИСА | 2001 |
|
RU2197412C2 |
| US 5130931 А, 14.07.1992 | |||
| US 6089508 A, 18.07.2000. | |||

