Назначение
Изобретение относится к космической технике в области оперативного управления ориентацией космического аппарата (КА) с оптико-электронной съемочной аппаратурой для дистанционного зондирования Земли (ДЗЗ) с использованием оптико-электронных средств астроориентации в виде астродатчиков (АД).
Уровень техники
При управлении движением КА необходимо выполнение следующих задач:
- получение нужной траектории КА (управление движением центра масс);
- управление ориентацией, то есть получение нужного положения корпуса КА относительно внешних ориентиров (управление вращательным движением вокруг центра масс);
- обеспечение режима, когда оба типа управления реализуются одновременно. После вывода КА на орбиту управление движением центра масс КА осуществляется
эпизодически в течение коротких интервалов времени (коррекция орбиты), а управление угловым положением с целью ориентации приборов КА на изучаемые объекты становится главным режимом полета (см. В.Н. Васильев. Системы ориентации космических аппаратов, М., 2009, с. 10-11). Поэтому важнейшей задачей современной космической техники, использующей телескопы и другую оптико-электронную аппаратуру с высоким пространственным разрешением, в частности, для дистанционного зондирования Земли, является совершенствование системы ориентации, позволяющей определить с высокой точностью направления осей КА относительно осей некоторой системы координат, т.е. угловое положение КА, а также его угловую скорость. Современные геоинформационные системы используют космические снимки высокого разрешения для создания топографических документов: топографических карт, цифровых моделей рельефа местности, их деталировки и тематического наполнения (см. Габрук С.В., Гершензон В.Е. Космические системы дистанционного зондирования Земли, 1997). К космическим снимкам высокого разрешения предъявляются жесткие требования по точности координатной привязки изображений с целью получения данных, пригодных для составления крупномасштабных топографических карт.
Для повышения точности координатной привязки должны быть приняты меры как аппаратного, так и алгоритмического плана, позволяющие улучшить измерительные характеристики датчиков ориентации КА и характеристики съемочной аппаратуры, поскольку погрешность датчиков ориентации КА и фотограмметрические погрешности съемочной аппаратуры (камер) вносят наибольший негативный вклад и ограничивают достижимую точность координатной привязки получаемых изображений. Основными факторами, влияющими на конечную точность съемки являются:
- фотограмметрические погрешности съемочной аппаратуры;
- погрешность определения положения космического аппарата в пространстве;
- погрешность работы системы угловой стабилизации аппарата;
- взаимные смещения датчиков ориентации и съемочной аппаратуры и т.д.
В количественном измерении в настоящее время выдвигается высокое требование получения изображений с точностью привязки около (1-2) м, для обеспечения которой предпочтение по точности среди известных различных способов определения ориентации КА (с использованием измерений относительно небесных светил: Солнца, Земли, Луны, звезд), а именно, инфракрасных датчиков, солнечных датчиков, звездных датчиков, магнитометров и т.д. (см. Алексеев К.Б., Бебенин Г.Г. Управление космическими летательными аппаратами. М.: Машиностроение, 1974), отдается звездным датчикам (ЗД). Современные ЗД фотографируют участок неба, выделяют на нем звезды, отождествляют их с объектами, содержащимися в бортовом звездном каталоге датчика. На основе этого сравнения определяются координаты центра поля зрения ЗД и поворот прибора относительно оси визирования. Для ЗД звезды являются бесконечно удаленными объектами, положение которых в инерциальной системе координат не меняются, т.е. ориентация относительно очень далеких объектов дает информацию об ориентации в инерциальной системе координат.
Основными задачами, которые решаются системами ориентации космических аппаратов, являются:
- собственно определение ориентации звездного датчика - трех углов поворота относительно некоторой системы координат;
- наведение некоторого устройства, установленного на КА - съемочной аппаратуры, антенны и т.д. в заданное направление (эта задача близка к предыдущей, но требует точного перенесения ориентации от звездного датчика к устройству);
- нанесение на некоторое изображение, например, изображение Земли, координатной сетки (это типичная задача дистанционного зондирования Земли). Дополнительными, но очень важными требованиями к перечисленным задачам являются точность определения координат, время за которое эти координаты определяются, а также предельные скорости вращения КА, при которых звездный датчик остается работоспособным.
Для периодического контроля и уточнения фотограмметрических параметров камер и системы в целом целесообразно использование полетной калибровки оптико-электронной аппаратуры по звездному небу. Важно, что эта процедура может проводиться в процессе эксплуатации с учетом реальных эксплуатационных факторов: невесомость, тепловые воздействия, старение материалов и механические воздействия (вибрации, ускорения) со стороны КА. Кроме того, потенциально достижимая точность такой калибровки может быть значительно выше, чем наземной, так как опорными элементами будут являться звезды, координаты которых известны с точностью сотых долей угловой секунды (см. Клюшников М.В., кандидатская диссертация "Звездный датчик и его использование для полетной фотограмметрической калибровки оптико-электронной аппаратуры дистанционного зондирования Земли", 2003 год).
Для получения информации по ориентации относительно инерциальной системы координат сегодня чаще всего используются устройства в виде датчиков угловой скорости (ДУС). Принцип работы ДУС электромеханического типа основан на гироскопическом эффекте. ДУСы других типов (лазерные, оптоволоконные, микромеханические) определяют скорость вращения вокруг заданной оси. ДУСы устанавливаются непосредственно на корпусе КА и подсоединены к микро ЭВМ, которая непрерывно производит расчет рысканья, крена и тангажа, определяющих ориентацию КА в связанной системе координат.
Современные датчики угловой скорости отличаются высокими точностями определения угловой скорости и высокой надежностью. С их помощью можно определить текущее угловое положение КА относительно некоторого начального путем интегрирования угловой скорости. Однако неустранимым недостатком является то, что на точность определения влияют воздействия случайных и плохо предсказуемых факторов. Поэтому на определение ориентации КА по интегралу показаний влияет наличие постоянной ошибки измерения угловой скорости, которая с течением времени приводит к накоплению погрешности определения недопустимого углового положения КА. Постоянная ошибка измерения угловой скорости присутствует у гироскопов всех типов, величину которой невозможно точно предсказать. Например, в механических датчиках угловой скорости уход вызывается в основном случайными силами в подшипниках подвески, в датчиках угловых скорости других типов причины, вызывающие уход осей, иные, но они приводят к тому же результату.
Для устранения накапливаемой погрешности ориентации требуется периодическая коррекция, которая может осуществляться датчиками углового положения - например, как было показано выше, самым точным астродатчиком - звездным датчиком (см. патент РФ 2577558), позволяющим точно определить ориентацию КА относительно опорной системы координат. Однако звездный датчик зависит от внешних ориентиров, при отсутствии в поле зрения которых он не работает, а также других факторов (например, засветка поля зрения прибора или превышение максимальной угловой скорости, наличие помех, вызванных искусственными спутниками Земли или звездами, не включенными в каталог и т.д.). Следовательно, возможны ситуации, когда он может использоваться только периодически, и значит, не всегда пригоден в качестве единственного датчика, определяющего параметры движения КА. Таким образом, для наиболее точного и непрерывного определения параметров движения КА, невозможного при использовании датчиков по отдельности, применяется совместная работа датчика угловой скорости (датчика текущей угловой скорости КА) и звездного датчика (датчика положения КА). Таким образом, совмещая два типа датчиков, получаем систему, способную функционировать с высокой точностью во всех возможных ситуациях, в том числе при наведении антенн, фото- и видеокамер на заданные объекты (см. Захаров А.И. и др. Минимальные технические характеристики звездного датчика ориентации, необходимые для достижения заданной погрешности. Астрофизический бюллетень, 2013, т. 68, №4, с. 507-520).
Такой принцип ориентации осуществляется в способе автоматической компенсации ошибок бесплатформенной системы ориентации в системе управления ориентацией космических аппаратов, и устройстве, реализующем этот способ (патент, РФ, 2517018), который является наиболее близким к предлагаемому изобретению и взятый авторами за прототип.
Сущность изобретения (прототипа) заключается в том, что предлагаемый способ автоматической компенсации ошибок бесплатформенной системы ориентации, входящей в систему управления ориентацией КА (вызванных систематическими погрешностями блока гироинерциальных измерителей, составленного из однокомпонентных датчиков угловой скорости), основан на сравнении оценок углов, вычисленных по показаниям блока датчиков угловой скорости, далее по тексту БДУС, с показаниями блока датчиков астроориентации (звездных датчиков), далее по тексту БЗД, в устройствах коррекции и выработке которыми сигналов коррекции систематических погрешностей блока датчиков угловой скорости, по которым исполнительными органами КА обеспечиваются механическое воздействие на корпус КА по рысканью, крену и тангажу.
Система управления ориентацией КА (прототип) содержит бесплатформенную систему ориентации, блок звездных датчиков, исполнительные органы, центральную ЭВМ и микро ЭВМ (контроллер системы ориентации). При этом бесплатформенная система ориентации включает в себя блок датчиков угловой скорости, установленных на корпусе КА, микро ЭВМ, выполняющую роль бортового компьютера с блоком согласования и команд управления, и осуществляющее интегрирование кинематических уравнений по информации об абсолютной угловой скорости КА, а также устройства коррекции ошибки, которые обеспечивают постоянное отслеживание отклонений, вызванных низкочастотными составляющими систематических погрешностей датчиков угловых скоростей, и компенсируют эти отклонения. В качестве исполнительных органов используются двигатели - маховики (или гиродины).
Недостатком прототипа является то, что присутствующие в нем звездные датчики функционируют в условиях с существенной неопределенностью и относятся к средствам космической техники критического назначения. Это определяется тем, что отказ функционирования звездных датчиков может привести к потере функциональных характеристик КА, а порой и всей с ним связанной миссии. Сегодня промышленно выпускаемые ЗД - это полностью автономные трехосные универсальные приборы для определения ориентации по изображениям звезд (см. патент, РФ, 2577558, а также В.Е. Набивач, Кибернетика и вычислительная техника. 2011. Вып. 166). Несмотря на количественное увеличение ЗД на КА (для повышения надежности функционирования на КА устанавливается несколько ЗД), например, три ЗД, причем в штатном режиме используются два звездных датчика определенным образом расположенными относительно мешающими небесными телами - Солнца, Луны и Земли (см. С.М. Войнаков и др., Космические исследования, 2014, том 52, №5, с. 408-414), все же данное увеличение ограниченным количеством ЗД не является оптимально недостаточным для обеспечения живучести КА, а также обеспечения требуемых текущих характеристик КА. С учетом важности снижения габаритов и массы при проектировании КА более рациональным является повышение надежности и живучести КА за счет использования сочетанных с ЗД способов и устройств определения положения КА путем оптимизации структурного построения имеющихся для работоспособности системы ориентации и с учетом жестких требований по малым массе и габаритам КА введения минимально необходимых технических устройств.
Следует учитывать, что при эксплуатации КА в автономном режиме (без постоянного контроля с Земли), нарушение в ориентации КА может привести к полному разряду аккумуляторных батарей, связанной с потерей ориентации солнечных батарей на Солнце, снижению живучести и потере КА.
Целью предлагаемого способа и устройства управления движением КА с управляемой ориентацией является повышение надежности и живучести КА при его длительной автономной эксплуатации в космосе.
Раскрытие изобретения
Поставленная цель достигается благодаря техническому обеспечению сочетанного использования блока звездных датчиков с устройствами ориентиров первого типа, благодаря чему повышается надежность работы системы ориентации, увеличивается ресурс работы звездных датчиков и в целом повышается живучесть КА. Кроме того, повышение живучести КА обеспечивается за счет ориентации солнечных батарей на Солнце, гарантирующей положительный энергобаланс, при любых каких-либо сбоях в работе системы ориентации КА, в том числе сбоях в работе центральной ЭВМ.
Под ориентиром первого типа подразумевается опорный ориентир, который невозможно спутать с другим и нет причин ожидать больших помех в аппаратуре от каких-то источников, не связанных с искомым ориентиром. Таким ориентиром является Солнце - источник мощнейшего излучения практически во всем диапазоне волн. Другим таким ориентиром может являться Земля, имеющая большие угловые размеры и достаточно сильное излучение как дневной, так и ночной стороны в инфракрасной части спектра. То же самое можно сказать о поиске заданного направления в магнитном поле Земли, т.е. вектора геомагнитного поля Земли (см. Б.В. Раушенбах, Е.Н. Токарь. Управление ориентацией космических аппаратов. - М.: Наука, 1974. - стр. 81).
Предлагаемый способ управления движением КА с управляемой ориентацией заключается в автоматической компенсации ошибок бесплатформенной системы ориентации, входящей в систему управления ориентацией КА, вызванных систематическими погрешностями блока датчиков угловой скорости, в сравнении показаний блока датчиков угловой скорости с показаниями блока звездных датчиков в устройствах коррекции ошибки, в выработке сигналов коррекции систематических погрешностей блока датчиков угловой скорости, в обработке их в микро ЭВМ, в управлении микро ЭВМ исполнительными органами для обеспечения ими соответствующего механического воздействия на корпус КА по рысканью, крену и тангажу, в ориентировании КА на заданной орбите с помощью устройства ориентиров первого типа, в автоматической установке солнечных батарей по солнечному датчику в фиксированное положение относительно корпуса КА для получения максимальной их освещенности, гарантирующих положительный энергобаланс при любых каких-либо сбоях в работе системы ориентации, в том числе сбоях в работе центральной ЭВМ, посредством управления с центра наземного управления устройством управления ориентацией солнечных батарей по жесткой логике при сбоях, во включении и выключении блока звездных датчиков для управления ориентацией КА по заданному управляемому алгоритму и по командам управления с центра наземного управления.
Устройство включает в себя центральную ЭВМ, бесплатформенную систему ориентации, блок звездных датчиков, исполнительные органы, в виде двигателей -маховиков или гиродинов, при этом бесплатформенная система ориентации включает в себя блок датчиков угловой скорости, установленных на корпусе КА, выходы которых непосредственно и через устройство коррекции ошибки соединены соответственно с первыми и вторыми входами микро ЭВМ, первые выходы которой соединены с вторыми входами устройства коррекции ошибки, третьи входы которого соединены с выходами блока звездных датчиков, входы которых соединены с вторыми выходами микро ЭВМ, третьи выходы которой соединены с входами исполнительных органов, установленных на корпусе КА.
В устройство управления движением КА с управляемой ориентацией вводятся устройство ориентиров первого типа, соединенные с микро ЭВМ, устройство управления ориентацией солнечных батарей, выходами соединенной с солнечными батареями, а также соединенной с центральной ЭВМ и с выходом солнечного датчика, приемник спутниковой навигации, соединенный с третьим входом микро ЭВМ, в качестве исполнительных органов электромагнитная система управления, электромагниты которой устанавливаются непосредственно на корпусе КА по осям X, Y, Z, а ее входы соединены с четвертыми выходами микро ЭВМ, при этом трехмерный магнитометр, соединенный с микро ЭВМ, является общим для устройства ориентиров первого типа и электромагнитной системы управления, центральная ЭВМ через информационный интерфейсный модуль соединена с микро ЭВМ и по радиоканалу с центром наземного управления.
В результате введения новых признаков достигается высокая надежность и живучесть КА, при обеспечении высокой точности ориентации для дистанционного зондирования Земли. Высокая надежность и живучесть КА достигается за счет обеспечения благоприятных условий работы, увеличения длительности в выключенном состоянии блока звездных датчиков, относящихся к средствам космической техники критического назначения, а также обеспечения гарантирующего положительного энергобаланса, при любых каких-либо сбоях в работе системы ориентации КА, в том числе сбоях в работе центральной ЭВМ. При этом в режиме работы с устройством первого типа (при включенном блоке звездных датчиков) обеспечивается недостаточно высокая точность ориентации. Высокая точность ориентации, необходимая для дистанционного зондирования Земли, достигается при включенном блоке звездных датчиков.
Графические иллюстрации
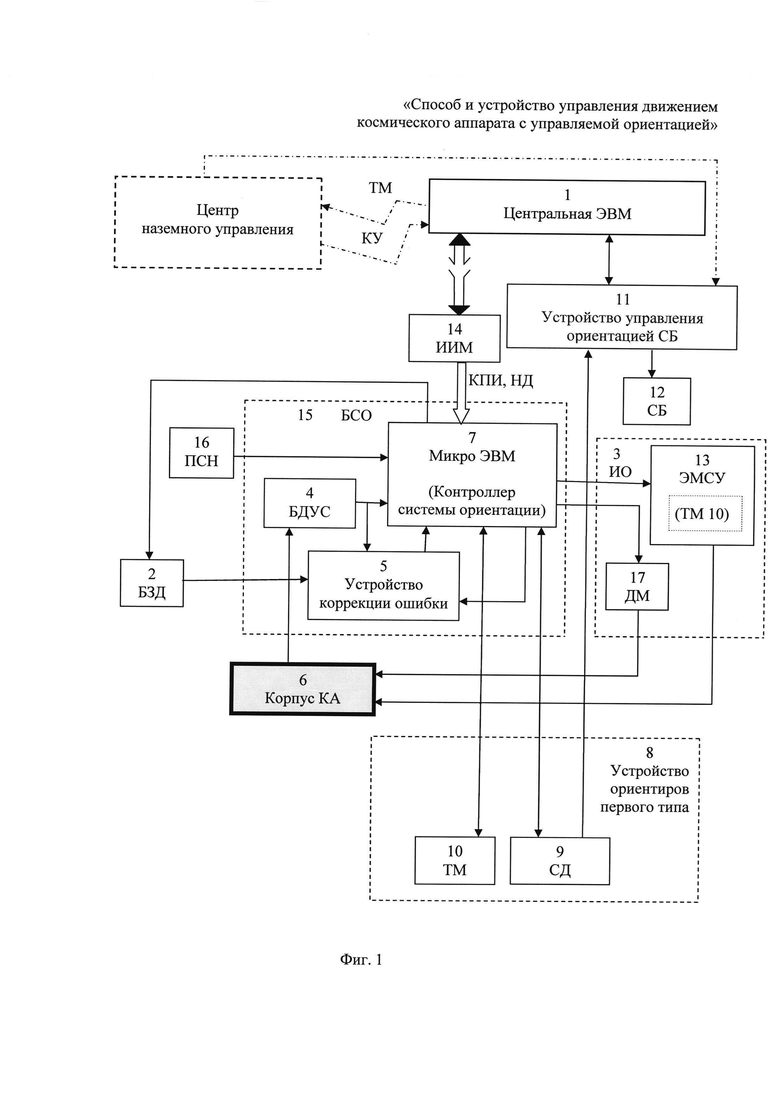
На фигуре 1 приведена структурная схема устройства управления движением космического аппарата с управляемой ориентацией.
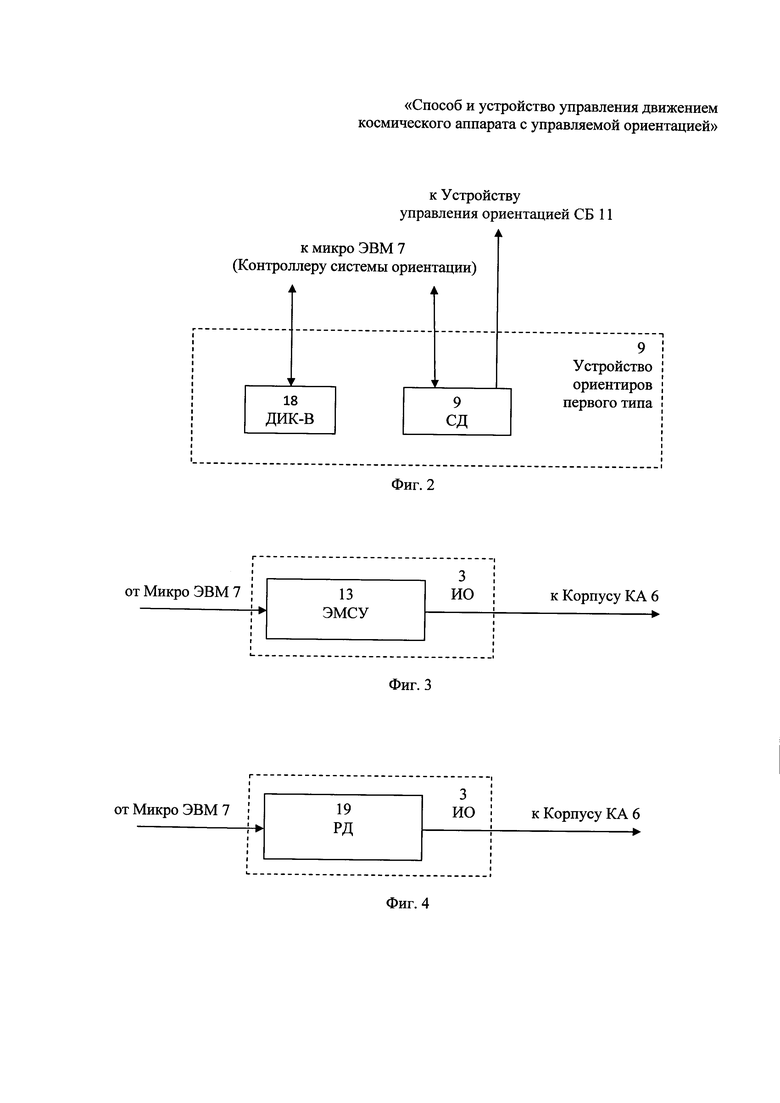
На фигуре 2 приведен вариант исполнения устройства ориентиров первого типа.
На фигурах 3-4 приведены варианты исполнения исполнительных органов.
Описание способа управления движением космического аппарата с управляемой ориентацией
Ориентируют КА на заданной орбите с помощью устройства ориентиров первого типа, автоматически устанавливают по солнечному датчику солнечные батареи в фиксированное положение относительно корпуса КА для получения максимальной их освещенности, гарантирующих положительный энергобаланс, управляют с центра наземного управления устройством управления ориентацией солнечных батарей по жесткой логике при любых каких-либо сбоях в работе системы ориентации, в том числе сбоях в работе центральной ЭВМ, включают и выключают блок звездных датчиков для управления ориентацией КА по заданному управляемому алгоритму и по командам управления с центра наземного управления, при этом автоматически компенсируются ошибки бесплатформенной системы ориентации, входящей в систему управления ориентацией КА, вызванных систематическими погрешностями блока датчиков угловой скорости, сравниваются показания блока датчиков угловой скорости и блока звездных датчиков в устройствах коррекции ошибки, вырабатываются сигналы коррекции систематических погрешностей блока датчиков угловой скорости, которые подаются в микро ЭВМ, управляющей исполнительными органами для обеспечения ими соответствующего механического воздействия на корпус КА по рысканью, крену и тангажу.
Описание работы устройства
Устройство управления движением космического аппарата с управляемой ориентацией содержит составляющие, обозначенные позициями на Фиг. 1:
- Центральная ЭВМ (электронно-вычислительное устройство) - 1;
- БЗД (блок звездных датчиков) - 2;
- ИО (исполнительные органы) - 3;
- БДУС (блок датчиков угловых скоростей) - 4;
- Устройство коррекции ошибки - 5;
- Корпус КА - 6;
- Микро ЭВМ - 7;
- Устройство ориентиров первого типа - 8;
- СД (солнечный датчик) - 9;
- ТМ (трехмерный магнитометр) - 10;
- Устройство управления ориентацией СБ - 11;
- СБ (солнечные батареи) - 12;
- ЭМСУ (электромагнитное устройство управления) - 13;
- ИИМ (информационный интерфейсный модуль) - 14;
- БСО (бесплатформенная система ориентации) - 15;
- ПСН (приемник спутниковой навигации GPS или ГЛОНАСС) - 16;
- ДМ (двигатели-маховики или гиродины) - 17.
При отделении КА от ракеты или разгонного блока осуществляется процесс успокоения и последующая стабилизация КА в орбитальной системе координат OXOYOZO. Вначале автоматически запускается режим начального демпфирования, предназначенный для снижения кинетического момента (гашение угловых скоростей вращения) КА, возникающего при отделении, и стабилизации КА относительно произвольной инерциальной системы координат, определяемой на момент отделения, то есть обнуления начального кинетического момента КА (см. патент, РФ, №2618664).
В автоматическом режиме по сигналам солнечного датчика 9 и центральной ЭВМ 1, поступающим в устройство управления ориентацией 11, под действием приводных двигателей, находящихся в нем (см. патент, РФ, №2410294), солнечные батареи 12 устанавливаются в положение относительно корпуса КА 6 для получения максимальной их освещенности, гарантирующих положительный энергобаланс.
Введение солнечного датчика 9 связано с повышением надежности и живучести КА, т.к. при эксплуатации в автономном режиме КА из-за отсутствия информационных показаний его положения с звездных датчиков может возникнуть длительное произвольное ориентирование положения КА, не позволяющее получать солнечными батареями освещенности от Солнца, приводящей к нарушению положительного энергобаланса и даже к полному разряду аккумуляторных батарей и потере КА.
В виду того, что СД 9 входит в устройство ориентиров первого типа 8, для получения высокой точности ориентации можно использовать оптический солнечный датчик (патент РФ 2517979) с высокой точностью определения угловых координат Солнца (погрешность менее 1 угловой минуты по всему полю зрения 190°×190°). Использование высокоточного солнечного датчика при засветке ЗД позволяет вместо их данных использовать информацию о положении Солнца, которая будет предсказываться на любой момент времени с высокой точностью.
Успокоение и последующая стабилизация КА осуществляется управляющими моментами Мх, Му, Mz по осям управления КА (X, Y, Z), получаемыми в результате взаимодействия генерируемых ЭМСУ 13 магнитных моментов относительно координатных осей КА - Lx, Ly, Lz с векторами магнитной индукции магнитного поля Земли Вх, Ву, Bz в соответствии с формулами (1,2).

где L - вектор создаваемого магнитного момента электромагнитными устройствами;
В - вектор магнитной индукции магнитного поля Земли.
В проекциях на оси управления КА выражение (1) принимает вид

(см. А.П. Коваленко. Магнитные системы управления космическими летательными аппаратами. М., «Машиностроение», 1975 г., стр. 21-22).
В качестве магнитных исполнительных органов ЭМСУ 13 можно использовать, например, электромагниты стержневого типа с сердечником из магнитно-мягкого материала с обмотками из медного провода (см. А.П. Коваленко. Магнитные системы управления космическими летательными аппаратами. М., «Машиностроение», 1975 г., стр. 178).
В качестве датчиков компонент геомагнитной индукции можно использовать, например, разработанный АО «Раменское приборостроительное конструкторское бюро» магнитометр цифровой трехкомпонентный МЦТ-8 (ТМ 10), который вырабатывает сигналы компонент магнитной индукции Вх, Ву, Bz.
Магнитные моменты относительно координатных осей КА - Lx, Ly, Lz формируются ЭМСУ 13 по сигналам, поступающим с выхода микро ЭВМ 7, и сформированные по сигналам компонент кинетического момента Кх, Ку, Kz, поступающим с Б ДУС 4:
В качестве датчиков угловых скоростей можно использовать наиболее перспективные в настоящее время приборы на основе волоконно-оптических гироскопов. При достаточно высокой точности они имеют относительно малые массу и габариты, например, освоенные в производстве приборы БИУС-М-1, разработки ЗАО НПП «Антарес».
В качестве микро ЭВМ 7 можно использовать, например, отечественные однокристальные микро ЭВМ серии 1816, которые включают в себя следующие неотъемлемые элементы: микропроцессор, ОЗУ, ПЗУ, устройства ввода и вывода данных (см. патент, РФ, N2571728).
В микро ЭВМ 7 с Центральной ЭВМ 1 поступают командно-программная информация (КПИ) навигационные данные (НД) через информационный интерфейсный модуль 14 (требование ГОСТ Р 52070-2003). Магистральная шина линии передачи информации выполняется из кабеля с витой экранированной парой проводов в защитной оболочке, к которым с обоих концов кабеля подключаются согласующие элементы. В качестве ИИМ 14 может быть использован, например, модуль сопряжения USB TA1-USB с мультиплексным каналом по ГОСТ Р 52070-2003 (MIL-STD-1553B).
Телеметрические информационные сигналы с центральной ЭВМ 1 передаются в центр наземного управления по телеметрии (ТМ), а из центра наземного управления в центральную ЭВМ 1- команды управления (КУ).
Затем осуществляется процесс приведения и последующая стабилизация КА в орбитальной системе координат OXOYOZO. При этом оси орбитальной системы координат OXOYOZO и оси связанной системы координат КА OXsYsZs (начало координат совпадает с центром масс КА; все оси расположены вдоль строительных осей КА) должны быть совмещены. В связанной системе координат КА OXsYsZs определяются следующие углы:
- крен - вращение вокруг оси OXs;
- рыскание - вращение вокруг оси OYs;
- тангаж - вращение вокруг оси OZs,
(при орбитальной ориентации размером корпуса можно пренебречь). Процесс приведения запускается автоматически, или по команде центральной ЭВМ 1. На основании навигационных данных (НД), периодически получаемых из центральной ЭВМ 1 через ИИМ 14, микро ЭВМ 7 определяет текущее положение центра масс КА в географической системе координат в привязке к текущему значению универсального кодированного времени (UTS) и вычисляет вектор геомагнитной индукции по международной модели геомагнитного поля IGRF (International geomagnetic reference field).
Поскольку на территории России отсутствует сеть опорных измерений векового хода геомагнитного поля, для целей интерпретации используется мировая модель нормального поля. Эта модель основана на представлении нормального поля в виде ряда по сферическим функциям, коэффициенты которого определяются каждые 5 лет на основе мировой сети магнитных обсерваторий (см. патент, РФ, №2618664).
где X, Y, Z - соответственно северная, восточная и вертикальная составляющие;
R - средний радиус Земли, r - расстояние от точки до центра Земли;
λ - долгота, θ=π/2-ϕ - дополнение до широты;
 - присоединенная функция Лежандра первого рода;
- присоединенная функция Лежандра первого рода;
 ,
,  - сферические гармонические коэффициенты.
- сферические гармонические коэффициенты.
На основании получаемых данных и с использованием матрицы преобразования из географической системы координат в орбитальную систему ориентации микро ЭВМ 7 формирует сигналы σx, σy, σz в соответствии с выражением (3), для формирования электромагнитами ЭСМУ 13 требуемых магнитных моментов относительно координатных осей КА - Lx, Ly, Lz, обеспечивающих заданное управление КА для переориентация КА в орбитальную СК.
Для измерения орбиты КА используются ПСН 16 GPS или ГЛОНАСС (см. "Вестник ГЛОНАСС" №3 (19)-2014), информация которой поступает в микро ЭВМ 7. Спутники передают периодически уточняемые эфемириды - набор координат, которые определяют положение спутников на орбите в различные моменты времени. Под влиянием гравитационного поля Земли и других факторов параметры исходных координат спутниковых систем изменяются и поэтому постоянно уточняются. В настоящее время точность "бортовых эфемирид", которые получают путем экстраполяции уточненной орбиты на несколько дней вперед, составляет 20-100 м, а при использовании специальных методов обработки - около 1 м.
В начале в штатном режиме в качестве датчика положения КА работает, уступающее по точности ориентации блоку звездных датчиков 2, устройство ориентиров первого типа 8, т.к. для получения информационных показаний положения КА с БЗД 2 требуется определенное время (а также в целях увеличения ресурса работы БЗД 2). Отсутствии информационных показаний положения КА с звездных датчиков может быть в следующих случаях:
- при включении системы ЗД, требующем определенного времени для отыскания требуемого участка неба, путем выделения звезд и отождествления их с объектами, содержащимися в бортовом звездном каталоге датчика (блок электроники ЗД должен проделать над полученным изображением следующие действия):
 произвести поиск изображений звезд на изображении фрагмента неба;
произвести поиск изображений звезд на изображении фрагмента неба;
для найденных звезд получить оценки координат их центров на ПЗС- или КМОП-матрицах и оценки блеска;
произвести отождествление конфигурации звезд в поле зрения ЗД со звездами из бортового каталога с учетом помех;
сделать прогноз входа и выхода звезд из поля зрения.
- при непосредственной засветке ЗД Солнцем. Если Солнце попадает непосредственно в поле зрение ЗД, то прибор перестает функционировать, так как становится невозможным регистрировать звезды на фоне рассеянного солнечного излучения. То же самое происходит, когда Солнце находится вне поля зрения ЗД, но вблизи от его границ;
- при сильных помехах, которые создают:
изображения звезд, не включенных в каталог;
тела Солнечной системы;
искусственные спутники Земли;
освещенные Солнцем пылинки вблизи объектива ЗД;
астрофизические транзиенты (вспыхивающие звезды, гамма-всплески, гравитационные микролинзы);
космические лучи, попадающие на матрицу фотоприемника;
сильное ионизирующее воздействие космического пространства
(самой длительной будет полная процедура восстановления ориентации, когда априорная информация отсутствует.Такая процедура выполняется как при включении системы ЗД, так и при потере ориентации.);
Устройство ориентиров первого типа 8, используемое для трехосной ориентации КА с использованием СД 9 и ТМ 10 представлено в патенте, РФ, №2408508 от 10. 01.2011 г., а также в статье Овчинников М.Ю., Пеньков В.И., Ролдугин Д.С. Трехосная магнитная система ориентации космического аппарата в инерциальном пространстве // Препринты ИПМ им. М.В. Келдыша. 2013. №74. 24 с. Рассматривается трехосная ориентация КА с использованием трехмерного магнитометра для определения вектора напряженности магнитного поля Земли с одновременным измерением параметров орбиты КА. Трехмерный магнитометр должен обязательно присутствовать в ЭСМУ 13, который вырабатывает сигналы компонент магнитной индукции Вх, Ву, Bz (см. формулу 2), поэтому он может быть общим для устройства ориентации первого типа 8 и ЭМСУ 13, и не требуется дополнительного введения его в устройство ориентации первого типа 8, что положительной отражается на массогабаритных характеристиках и надежности КА.
Как было показано выше, звездные датчики являются наиболее точными, для которых звезды являются бесконечно удаленными объектами, положение которых в инерциальной системе координат не меняются, т.е. ориентация относительно очень далеких объектов дает информацию об ориентации в инерциальной системе координат, поэтому БЗД 2 обязательно включается на участках дистанционного зондирования Земли, где требуется высокая точность ориентации. Для координатной привязки видеоданных дистанционного зондирования высокого разрешения необходимо получить информацию о пространственном положении съемочной камеры и об углах ее наклона. БЗД 2 позволяет определить матрицы перехода от системы координат БЗД 2 к системе координат звездного каталога, приведенную на текущую эпоху. Он обеспечивает определение углов наклона аппарата относительно второй экваториальной системы координат.Т.е. прибор звездной ориентации БЗД 2 позволяет определять параметры матрицы (кватерниона) перехода от приборной системы координат, определяемой посадочным местом БЗД 2 ко второй экваториальной системе координат (инерциальной). В БСО 15 микро ЭВМ 7, как и в прототипе, осуществляет интегрирование кинематических уравнений по информации об абсолютной угловой скорости КА, а устройства коррекции ошибки 5 обеспечивают постоянное отслеживание отклонений, вызванных низкочастотными составляющими систематических погрешностей блока датчиков угловых скоростей 4, и данные отклонения компенсируются посредством механического воздействия ДМ 17 на корпус КА 6 по рысканью, крену и тангажу. С учетом того, что сброс накапливаемого кинетического момента с двигателей-маховиков возможен только с помощью внешних управляющих механических моментов, воздействующих на КА и формируемых, например, электромагнитами в магнитной системе ориентации КА (см. патент, РФ. 2618664), то сброс кинетического момента с ДМ 17 осуществляется с помощью ЭМСУ 13. Следует отметить, что, в данном ИО 3 для компенсаций отклонений, вызванных низкочастотными составляющими систематических погрешностей блока датчиков угловых скоростей 4, механическое воздействие на корпус КА 6 может быть совместным ДМ 17 с ЭМСУ 13.
ПСН 16 позволяет определять геоцентрические координаты КА в момент съемки. При нарушении в работе спутниковой системы навигации возможно использование моментов съемки вместе с орбитальными данными, полученными в результате наземных наблюдений за КА и передачи команд управления (КУ) из центра наземного управления. Расчет позволяет определить искомые геоцентрические координаты КА. Солнечный датчик 9 позволяет определять направление на Солнце в системе координат КА. При помощи солнечного датчика 9 можно выполнить ориентирование КА перед съемкой по Солнцу для выставки требуемых условий освещенности снимаемой поверхности при значительных угловых скоростях, когда использование БЗД 2 не представляется возможным.
Таким образом, данные БЗД 2 используются для:
- наведения съемочной (целевой) аппаратуры при ДЗЗ в заданную область пространства;
- координатно-временной привязки видеоинформации в комплексе с ПСН 16 (ГЛОНАСС, GPS);
- управления движением КА в режиме реального времени;
- астрокоррекции гироскопических приборов на борту КА, а данные СД 9 используются для:
- ориентирования солнечных батарей КА на Солнце и поддержание Солнечной ориентации;
- ориентирования КА с целью получения требуемого направления на Солнце в системе координат.
Радикальной защитой от аварийной ситуации на КА, связанной с потерей ориентации на Солнце, может быть автоматический переход с основного на резервный режим управления ориентацией КА относительно направления на Солнце. Такой режим работы не может обеспечить в полной мере функциональные возможности КА, но он гарантирует положительный энергобаланс, что обеспечивает живучесть КА. Переход на резервный режим управления ориентацией проводится по «жесткой» логике, т.е. без использования центральной ЭВМ 1, при воздействиях на КА различных факторов космического пространства, например, локальных статических разрядов, приводящих к сбою в работе центральной ЭВМ 1. При этом солнечные батареи 12 постоянно ориентированы на Солнце благодаря приводным двигателям (см. патент, РФ, №2410294), находящимся в устройстве управления ориентацией СБ 11. Последующее возобновление ориентации КА с использованием Центральной ЭВМ 1 осуществляют по радиокоманде (КУ) с центра наземного управления.
Совмещение двух режимов ориентации (основного и резервного), с учетом конкретных рекомендаций перехода с одного режима ориентации на другой и обратно, позволяет получить дополнительный положительный эффект - обеспечение живучести КА.
Следует отметить, что БЗД 2 может включаться по алгоритму, определяемому микро ЭВМ 7, и не на участках дистанционного зондирования Земли для поддержания высокой точности ориентации.
Устройство ориентиров первого типа 9 также может быть выполнено в виде в виде устройства, представленного на фиг. 2, и содержащего составляющие, обозначенные позициями:
18 - Датчик инфракрасной вертикали (ДИК-В);
9 - СД;
ДИК-В 18 соединен с микро ЭВМ 7, а СД 9 - с микро ЭВМ 7 и с устройством управления ориентацией СБ 11.
Датчиком инфракрасной вертикали называют оптико-электронные приборы, предназначенные для определения на борту КА направления местной вертикали. В основу принципа определения местной вертикали положено измерение углов между связанными осями КА и направлениями на края диска Земли в различных точках горизонта. В качестве ДИК-В 18 можно использовать, например, прибор 344К, выпускаемый ОАО «НПП «ГЕОФИЗИКА - Космос», который определяет угловое положение центра Земли в приборной системе координат, связанной с посадочной плоскостью изделия. Угловое положение определяется двумя углами, рассчитываемыми по положению центра изображения Земли, углом крена и углом тангажа (см. А.Д. Беленький, В.Н. Васильев, А.С. Семенов, М.Е. Семенов. ОАО «Корпорация «ВНИИЭМ». Вопросы электромеханики Т. 130. 2012), т.е. прибор выдает выходные сигналы, соответствующие углам отклонения ориентируемой оси от местной вертикали по крену и тангажу. В данной работе представлен алгоритм вычисления кватерниона рассогласования по сигналам инфракрасного датчика вертикали Земли.
Работа ДИК-В 18 в инфракрасной области спектра позволяет работать на любом участке орбиты, как на дневной, так и теневой ее стороне.
Описание ориентации космического аппарата по местной вертикали при ориентации КА относительно направления на Солнце приведено в патенте, РФ, №2021174.
Следует отметить, что датчик инфракрасной вертикали при не достаточно высокой точности, обладает высокой надежностью.
Исполнительные органы 3 также могут быть выполнены в виде в виде устройства, представленного на фиг. 3, и содержащего электромагнитное устройство управления ЭМСУ 13, входы которого соединены с четвертыми выходами микро ЭВМ, а его электромагниты устанавливаются непосредственно на корпусе КА по трем осям Xs, Ys, Zs. В данном ИО 3 для компенсаций отклонений, вызванных низкочастотными составляющими систематических погрешностей блока датчиков угловых скоростей 4, механическое воздействие на корпус КА 6 только ЭМСУ 13. Формирование управляющих механических моментов Мх, My, Mz (по крену, рысканью и тангажу) ЭМСУ 13 на корпус КА 6 описано выше в тексте предлагаемого изобретения.
Исполнительные органы 3 также могут быть выполнены в виде в виде устройства, представленного на фиг. 4, и содержащего реактивные двигатели РД 19 по осям Xs, Ys, Zs.
Принцип работы реактивных двигателей, управляемых микро ЭВМ 7, и схемы их расположения на КА, общеизвестны и широко описаны в различных источниках информации. Так, например, описание работы реактивных двигателей РД 19 и схемы расположения по осям в связанной системе координат КА приведены в книге: Б.В. Раушенбах, Е.Н. Токарь. Управление ориентацией космических аппаратов. «Наука», М., 1974. стр. 111-113.
Таким образом, достигается высокая надежность и живучесть системы ориентация КА с заданной высокой точностью дистанционного зондирования Земли.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления космическим аппаратом дистанционного зондирования Земли | 2019 |
|
RU2722598C1 |
| Способ спутниковой гравитационной градиентометрии | 2020 |
|
RU2745364C1 |
| Способ управления движением космического аппарата с управляемой ориентацией | 2020 |
|
RU2767648C1 |
| СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА | 2020 |
|
RU2736522C1 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА В ПРОСТРАНСТВЕ С АВТОНОМНОЙ КОРРЕКЦИЕЙ ЭФФЕКТА АБЕРРАЦИИ СВЕТА | 2019 |
|
RU2723199C1 |
| СПОСОБ АВТОНОМНОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОРБИТЫ КОСМИЧЕСКОГО АППАРАТА | 2017 |
|
RU2696399C2 |
| Способ динамичной высокоточной ориентации и стабилизации космического аппарата | 2018 |
|
RU2702932C1 |
| Способ управления ориентацией космического аппарата | 2021 |
|
RU2760818C1 |
| АВТОНОМНАЯ БОРТОВАЯ СИСТЕМА УПРАВЛЕНИЯ КОСМИЧЕСКОГО АППАРАТА "ГАСАД" | 1993 |
|
RU2033949C1 |
| СПОСОБ ОБЗОРА НЕБЕСНОЙ СФЕРЫ С КОСМИЧЕСКОГО АППАРАТА ДЛЯ НАБЛЮДЕНИЯ НЕБЕСНЫХ ОБЪЕКТОВ И КОСМИЧЕСКАЯ СИСТЕМА ОБЗОРА НЕБЕСНОЙ СФЕРЫ ДЛЯ НАБЛЮДЕНИЯ НЕБЕСНЫХ ОБЪЕКТОВ И ОБНАРУЖЕНИЯ ТЕЛ СОЛНЕЧНОЙ СИСТЕМЫ, РЕАЛИЗУЮЩАЯ УКАЗАННЫЙ СПОСОБ | 2012 |
|
RU2517800C1 |
Группа изобретений относится к космической технике. Способ управления движением КА заключается в автоматической компенсации ошибок бесплатформенной системы ориентации, входящей в систему управления ориентацией КА, вызванных систематическими погрешностями блока датчиков угловой скорости, используя сравнение показаний блока датчиков угловой скорости с показаниями блока звездных датчиков в устройствах коррекции ошибки. Устройство управления включает в себя центральную ЭВМ, бесплатформенную систему ориентации, блок звездных датчиков, исполнительные органы, устройство ориентации КА, содержащее солнечный датчик и трехмерный магнитометр или датчик ИК-вертикали, соединенные с микро-ЭВМ, устройство управления ориентацией солнечных батарей, приемник спутниковой навигации, электромагнитную систему управления, электромагниты которой устанавливаются непосредственно на корпусе КА по осям X, Y, Z. Трехмерный магнитометр является общим для устройства ориентации КА и электромагнитной системы управления. Техническим результатом группы изобретений является обеспечение надежности и живучести КА при высокой точности ориентации. 2 н.п. ф-лы, 4 ил.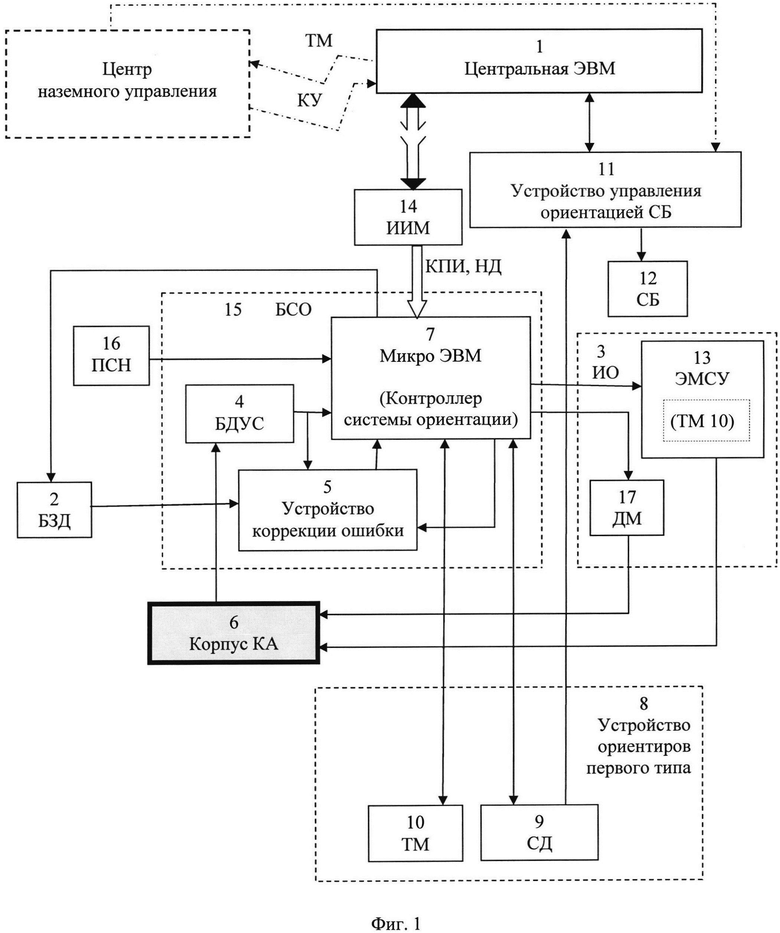
1. Способ управления движением КА с управляемой ориентацией, заключающийся в автоматической компенсации ошибок бесплатформенной системы ориентации, входящей в систему управления ориентацией КА, вызванных систематическими погрешностями блока датчиков угловой скорости, в сравнении показаний блока датчиков угловой скорости и блока звездных датчиков в устройствах коррекции ошибки, в выработке сигналов коррекции систематических погрешностей блока датчиков угловой скорости, в обработке их в микроЭВМ, в управлении микроЭВМ исполнительными органами, для обеспечения ими соответствующего механического воздействия на корпус КА по рысканью, крену и тангажу, отличающийся тем, что ориентирует КА на заданной орбите с помощью устройства ориентации КА, содержащего солнечный датчик и трехмерный магнитометр или датчик инфракрасной вертикали, автоматически устанавливают солнечные батареи по солнечному датчику в фиксированное положение относительно корпуса КА для получения максимальной их освещенности, гарантирующих положительный энергобаланс при любых каких-либо сбоях в работе системы ориентации, в том числе сбоях в работе центральной ЭВМ, управляют с центра наземного управления устройством управления ориентацией солнечных батарей по жесткой логике при сбоях, включают и выключают блок звездных датчиков для управления ориентацией КА по заданному управляемому алгоритму и по командам управления с центра наземного управления.
2. Устройство управления движением КА с управляемой ориентацией, включающее в себя центральную ЭВМ, бесплатформенную систему ориентации, блок звездных датчиков, исполнительные органы, при этом бесплатформенная система ориентации включает в себя блок датчиков угловой скорости, установленных на корпусе КА, выходы которых непосредственно и через устройство коррекции ошибки соединены соответственно с первыми и вторыми входами микроЭВМ, первые выходы которой соединены с вторыми входами устройства коррекции ошибки, третьи входы которого соединены с выходами блока звездных датчиков, входы которых соединены с вторыми выходами микроЭВМ, третьи выходы которой соединены с входами исполнительных органов, установленных на корпусе КА, отличающееся тем, что введены устройство ориентации КА, содержащее в своем составе солнечный датчик, и трехмерный магнитометр или датчик инфракрасной вертикали, соединенные с микроЭВМ, устройство управления ориентацией солнечных батарей, выходами соединенное с солнечными батареями, а также соединенное с центральной ЭВМ и с выходом солнечного датчика, приемник спутниковой навигации, соединенный с третьим входом микроЭВМ, исполнительные органы представлены в виде двигателей-маховиков, или гиродинов, или электромагнитной системы управления, электромагниты которой непосредственно устанавливаются на корпусе КА по осям Xs, Ys, Zs, а ее выходы соединены с четвертыми выходами микроЭВМ, или реактивных двигателей, установленных на корпусе КА по осям Xs, Ys, Zs, и управляемых от микроЭВМ, при этом трехмерный магнитометр, соединенный с микроЭВМ, является общим для устройства ориентации КА и электромагнитной системы управления, центральная ЭВМ через информационный интерфейсный модуль соединена с микроЭВМ и по радиоканалу с центром наземного управления для телеметрии и передачи команд управления.
| СПОСОБ АВТОМАТИЧЕСКОЙ КОМПЕНСАЦИИ ОШИБОК БЕСПЛАТФОРМЕННОЙ СИСТЕМЫ ОРИЕНТАЦИИ В СИСТЕМЕ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ КОСМИЧЕСКИХ АППАРАТОВ, И УСТРОЙСТВО, РЕАЛИЗУЮЩЕЕ ЭТОТ СПОСОБ | 2012 |
|
RU2517018C2 |
| СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ БЕСПЛАТФОРМЕННОГО ОРБИТАЛЬНОГО ГИРОКОМПАСА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2579387C1 |
| US 4012018 A1, 15.03.1977. | |||

