Область техники, к которой относится изобретение
Настоящее изобретение относится к автоматическому регулированию различных подсистем в транспортном средстве. Более конкретно, настоящее описание относится к автоматическому изменению режима работы транспортного средства на основе условий окружающей среды или выбора водителя и изменению команд, выдаваемых подсистемам на основе изменения режима работы.
Уровень техники
Различные подсистемы транспортного средства, как известно, работают в разных режимах конфигурации для удовлетворения разным условиям. Например, автоматическими коробками передач можно управлять в режимах "спортивной", "зимней", "экономичной" и "ручной" конфигурации, в которых переключения между передаточными числами и другими параметрами управления подсистемой модифицируются для удовлетворения условиям вождения или предпочтениям водителя. Известны пневматические подвески с режимами конфигурации для движения по дороге и бездорожью. Системами рулевого управления с усилителем можно управлять в разных режимах конфигурации, в которых изменяется уровень усиления.
При увеличении количества настроек управления и машинных команд в транспортных средствах, а также при увеличении количества управляемых подсистем в транспортных средствах для водителя может стать более трудным выбор и выделение надлежащего режима конфигурации при текущих обстоятельств. Поэтому может быть желательно иметь стратегию интегрированного управления, которая автоматически определяет надлежащую настройку для каждой подсистемы транспортного средства.
Раскрытие изобретения
Согласно одному варианту осуществления изобретения, система управления транспортным средством включает в себя модуль адаптивного управления вождением, запрограммированный с возможностью управления подсистемами транспортного средства в соответствии с различными режимами работы. Сенсорная система сконфигурирована с возможностью считывания состояний, связанных с дорожной поверхностью, по которой движется транспортное средство. По меньшей мере, один контроллер запрограммирован с возможностью классификации состояний дорожной поверхности и изменения режима работы транспортного средства на основе классифицированных состояний дорожной поверхности. Режимы работы могут включать в себя те, которые используются для управляемых систем подвески, таких как система непрерывно управляемого демпфирования (CCD) и регулируемая система рулевого управления, такая как электронная система рулевого управления с усилителем или система активного переднего рулевого управления.
Классифицированные состояния дорожной поверхности могут включать в себя те, которые могут вызывать движения корпуса транспортного средства в направлениях наклона, подъема и/или крена, и те, которые могут вызывать высокочастотные колебания узлов шины и колеса. Классифицированные сигналы от сенсорной системы могут автоматически вызывать изменение контроллером режима работы транспортного средства.
По меньшей мере, один контроллер может быть дополнительно запрограммирован с возможностью дискретизации классифицированных состояний дорожной поверхности и изменения режима работы на основе дискретизированных классифицированных состояний дорожной поверхности.
Считанные состояния дорожной поверхности могут быть охарактеризованы непрерывно изменяющимися переменными, которые могут быть далее дискретизированы или классифицированы на дискретные состояния с дискретными величинами. Вертикальные изменения дорожной поверхности могут быть представлены в цифровом виде во временном ряде для обработки цифровым компьютером. Эти дискретные величины могут использоваться для приведения в действие логики принятия решений, которая изменяет режим работы транспортного средства.
В соответствии с другим вариантом осуществления изобретения, система управления транспортным средством содержит регулируемую систему рулевого управления, такую как электронный модуль регулирования рулевого управления с усилителем, запрограммированный с возможностью управления электронной подсистемой рулевого управления с усилителем в соответствии с различными режимами работы. Сенсорная система сконфигурирована с возможностью считывания состояний дорожной поверхности, связанной с дорожной поверхностью, по которой движется транспортное средство. По меньшей мере, один контроллер запрограммирован с возможностью дискретизации состояния дорожной поверхности и изменения режима работы на основе дискретизированных состояний дорожной поверхности.
В соответствии с другим вариантом осуществления изобретения, транспортное средство содержит модуль управления силовой передачей, запрограммированный с возможностью: (1) работы во множестве режимов и (2) снабжения силовой передачи рабочими командами, которые изменяются в соответствии с тем, в каком режиме работает модуль управления силовой передачей. Множество датчиков сконфигурировано с возможностью считывания состояний дорожной поверхности, связанных с дорожной поверхностью, по которой движется транспортное средство. По меньшей мере, один контроллер запрограммирован с возможностью классификации состояний дорожной поверхности и изменения режима работы на основе классифицированных состояний дорожной поверхности.
В соответствии с другим вариантом осуществления изобретения, транспортное средство содержит модуль (CCD) непрерывно управляемого демпфирования, запрограммированный с возможностью выдачи данных о разных уровнях демпфирования в соответствии с различными режимами работы. Сенсорная система сконфигурирована с возможностью считывания состояний дорожной поверхности, связанных с дорожной поверхностью, по которой движется транспортное средство. По меньшей мере, один контроллер запрограммирован с возможностью дискретизации состояний дорожной поверхности и изменения режима работы на основе дискретизированных состояний дорожной поверхности.
По меньшей мере, один контроллер может быть дополнительно запрограммирован с возможностью дискретизации классифицированных считанных состояний дорожной поверхности и изменения режима работы на основе дискретизированных классифицированных состояний дорожной поверхности.
Краткое описание чертежей
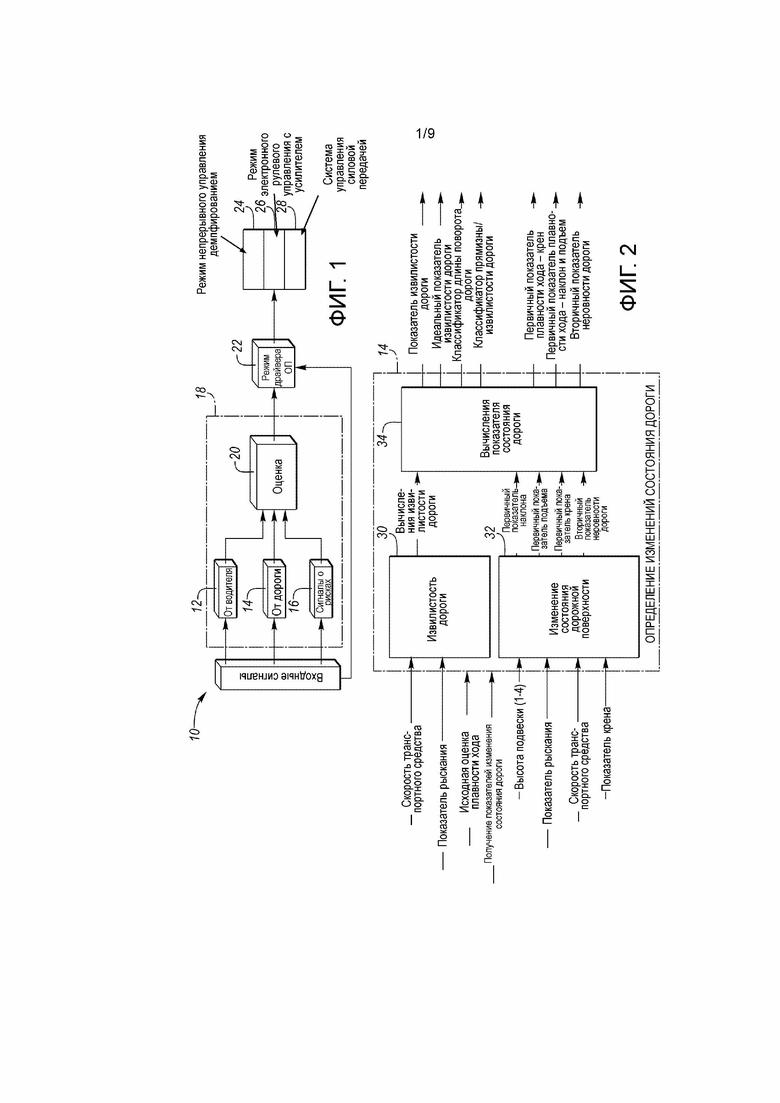
Фиг. 1 - сигнальная блок-схема, иллюстрирующая последовательный поток сигналов от считанных характеристиках дороги до выбора режима работы транспортного средства.
Фиг. 2 - детализированная иллюстрация входных и выходных сигналов о считанной извилистости дороги и состоянии поверхности и следующих из них результатов вычислений показателей состояния дороги, выданных для оценки показателей и выбора соответствующего режима работы.
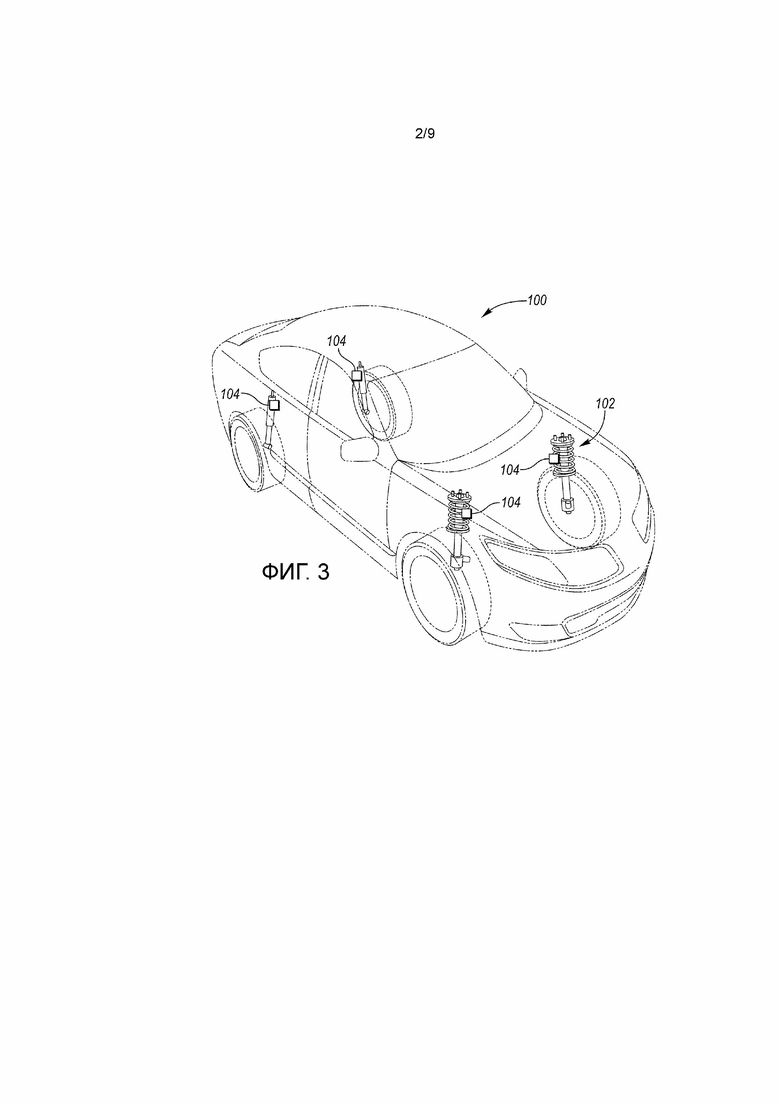
Фиг. 3 - вид в перспективе сенсорной системы подвески для считывания высоты узлов подвески транспортного средства, таким образом указывая относительное расстояние от корпуса транспортного средства до дороги в каждом углу транспортного средства.
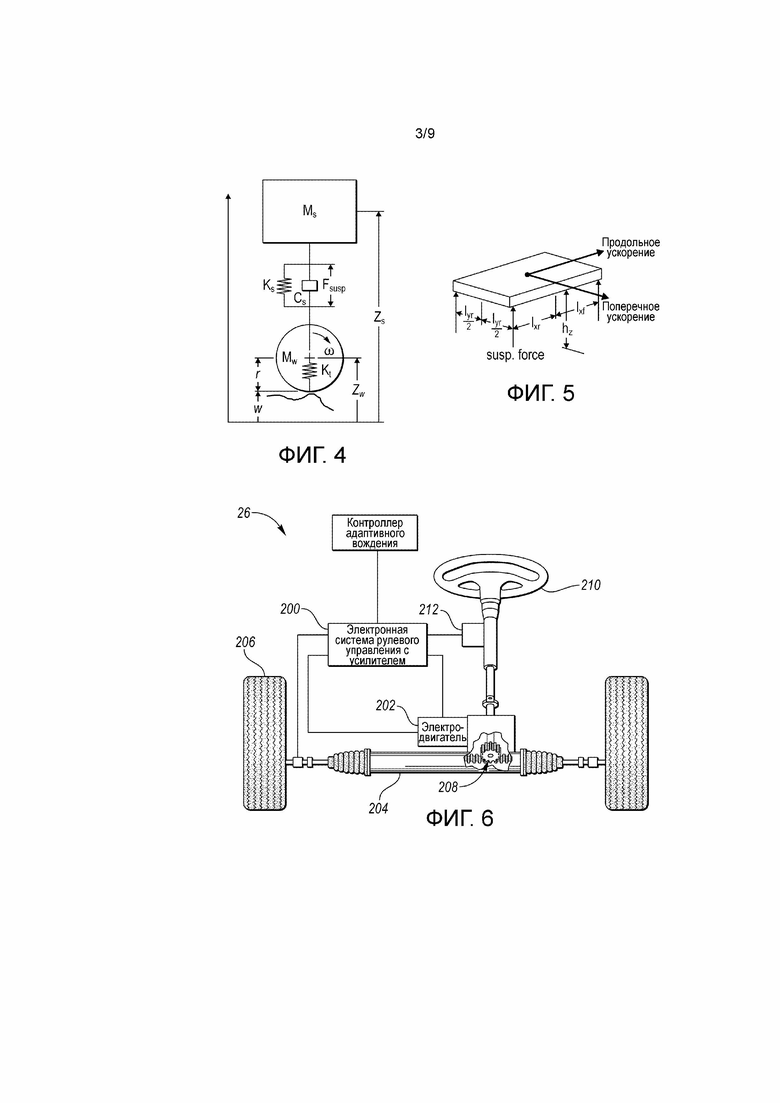
Фиг. 4 - схематическое изображение, показывающее известные элементы и математические зависимости в одном из узлов подвески.
Фиг. 5 - схематическое изображение, показывающее смещение (относительно дорожной поверхности) четырех углов корпуса транспортного средства.
Фиг. 6 – схематический вид электронной системы регулирования рулевого управления с усилителем.
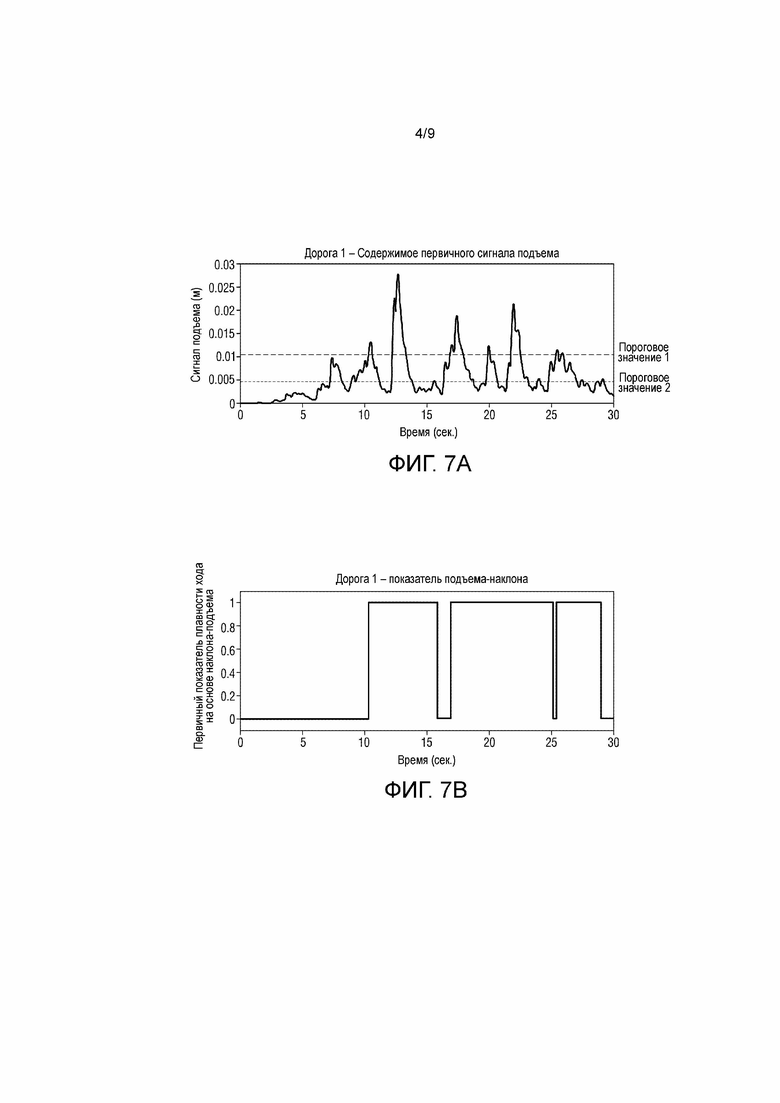
Фиг. 7A иллюстрирует сигнал подъема транспортного средства, и фиг. 7B иллюстрирует результирующий показатель наклона-подъема.
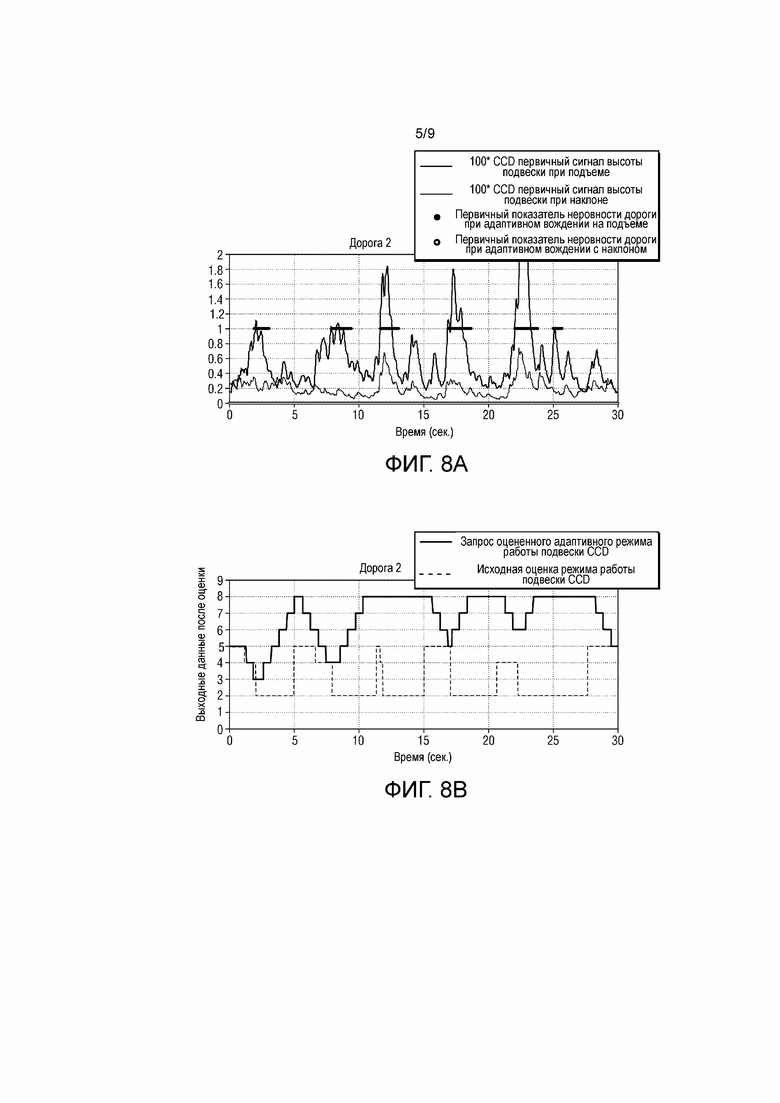
Фиг. 8A иллюстрирует сигналы уклона и подъема, указывающие на резкость уклона и подъема, и фиг. 8B иллюстрирует полученную градуированную величину для дальнейшего вычисления и анализа относительно того, в каком режиме должно работать транспортное средство.
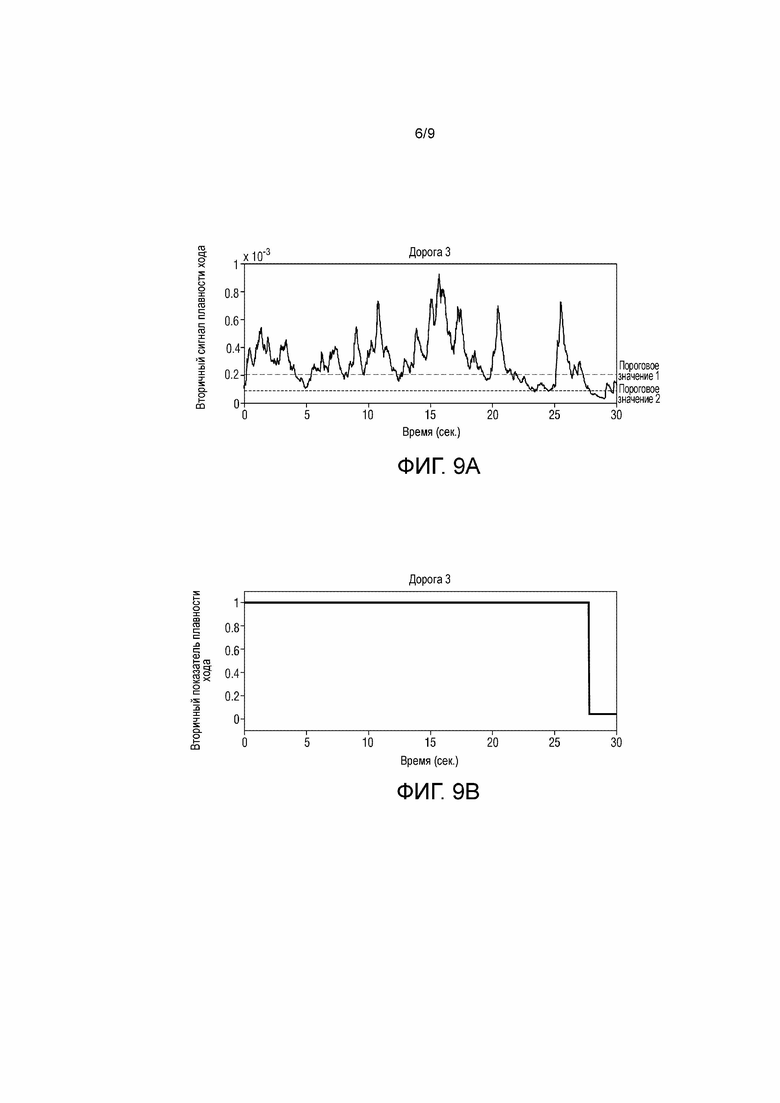
Фиг. 9A иллюстрирует сигнал высоты подвески с двумя соответствующими пороговыми величинами, и фиг. 9B иллюстрирует результирующие вторичные величины показателя плавности хода на основе сравнения сигнала высоты подвески и пороговых величин.
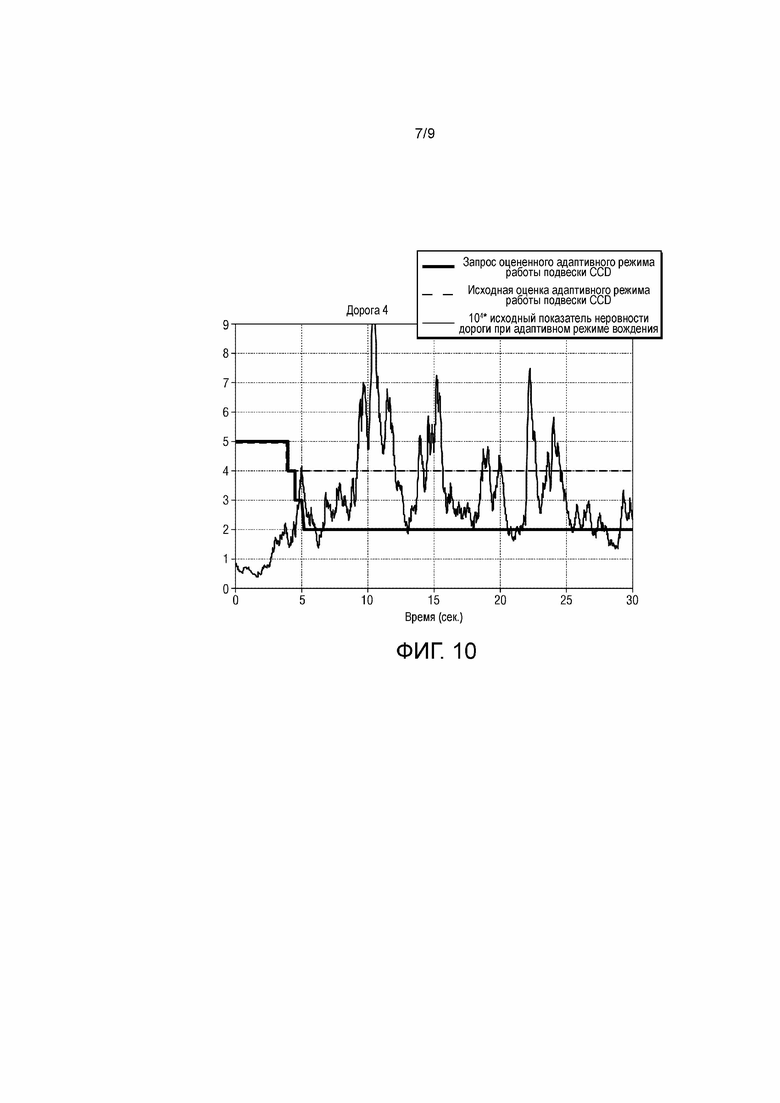
Фиг. 10 иллюстрирует комбинированный график исходных данных о неровности дороги, определенных датчиками высоты подвески, результирующего вторичного контекстного сигнала плавности хода и результирующего сигнала запроса режима работы подвески.
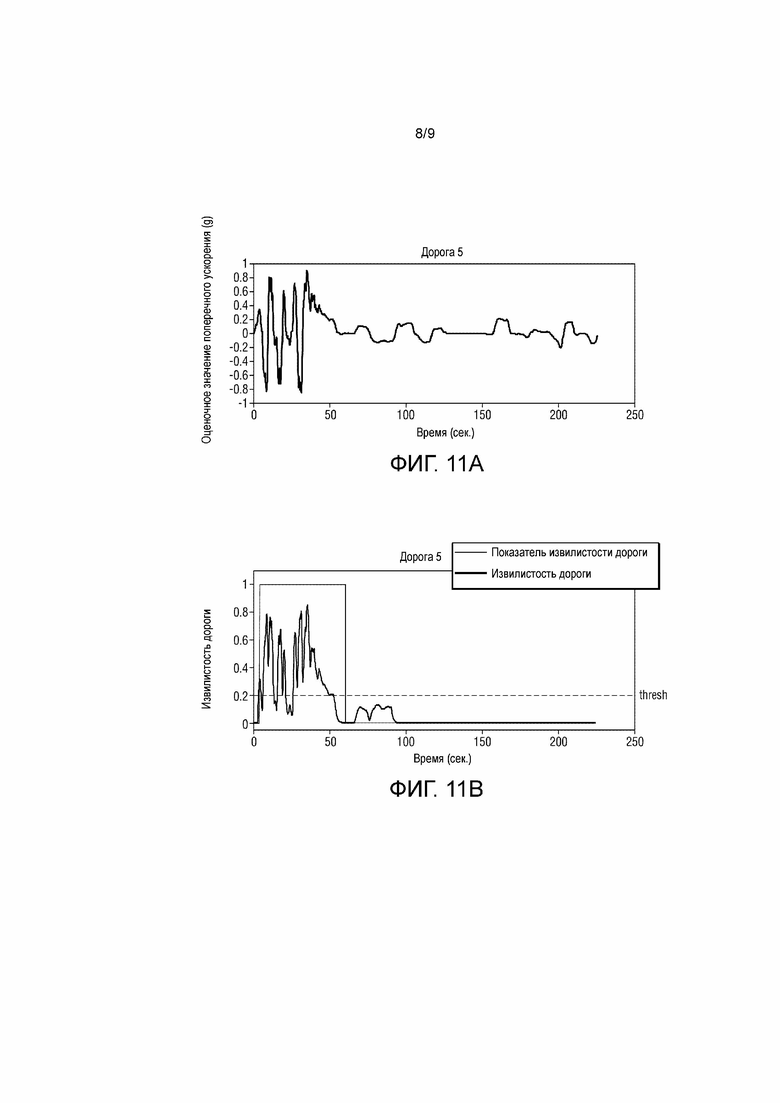
Фиг. 11A иллюстрирует график поперечного ускорения транспортного средства, выведенного на основе преобразования данных от датчиков высоты подвески, и фиг. 11В иллюстрирует результирующий сигнал извилистости дороги и результирующий показатель извилистости дороги.
Фиг. 12А-12С иллюстрируют сравнение извилистости дороги и показателя извилистости с фиг. 11В, результирующей величины показателя подвески и градуированной величины режима электронного рулевого управления с усилителем для принятия решения о том, в каком режиме следует управлять транспортным средством.
Осуществление изобретения
Здесь описаны варианты осуществления настоящего изобретения. Однако следует понимать, что описанные варианты осуществления изобретения представляют собой просто примеры, и другие варианты осуществления изобретения могут принимать различные и альтернативные формы. Фигуры необязательно показаны в определенном масштабе; некоторые элементы могут быть преувеличены или уменьшены для показа деталей конкретных компонентов. Таким образом, описанные здесь конкретные структурные и функциональные детали не следует интерпретировать как ограничивающие, а просто как представляющие базис для предложения специалисту в данной области техники возможности по-разному использовать варианты осуществления изобретения. Как будет понятно специалистам в данной области техники, различные признаки, проиллюстрированные и описанные со ссылками на любую из фигур, могут быть скомбинированы с признаками, проиллюстрированными на одной или более других фигур, для выполнения вариантов осуществления изобретения, которые явно не показаны или описаны. Комбинации показанных признаков представляют варианты осуществления изобретения для типичных вариантов применения. Однако различные комбинации и модификации признаков, согласующихся с идеями этого описания, могут быть необходимы для конкретных вариантов применения или осуществления изобретения.
На фиг. 1 показана полная блок-схема системы 10 адаптивного управления вождением (ADC), которая может управлять различными подсистемами в пределах транспортного средства. Как будет описано дополнительно ниже, система адаптивного управления может изменять режим работы транспортного средства, таким образом, воздействуя на инструкции и команды, выданные различным подсистемам для получения желательных эксплуатационных функций. Например, система адаптивного управления может изменять режим работы транспортного средства из "нормального" режима в "спортивный" режим, в котором рулевое управление с усилителем может стать более чувствительным, подвеска может быть усилена, и другие подсистемы могут изменяться соответственно. "Спортивный", "нормальный" и "комфортный" режимы представляют собой три примерных режима, которые могут быть отобраны автоматически для адаптации к состояниям дорожной поверхности и изменениям геометрии дороги, таких как извилистость.
Система адаптивного управления получает три первичных входных данных, то есть, входной сигнал 12 от водителя (например, водителя, вручную выбирающего режим управления), считанные данные 14 состояния дороги и факторы 16 риска, относящиеся к риску изменения режимов работы при некоторых условиях движения. По меньшей мере, один процессор или контроллер 18 тогда выполняет функцию 20 оценки и на основе этих трех входных данных автоматически определяет посредством различных алгоритмов, какой режим работы должен быть введен на этапе 22. Когда введен режим работы, инструкции и управляющие сигналы, выданные подсистемам (например, системе (CCD) непрерывно управляемого демпфирования или системе 24 подвески, системе (TPAS) 26 электронного рулевого управления с усилителем и системе 28 управления силовой передачей (РТ)), изменяются таким образом, что характеристики вождения изменяются соответственно.
На фиг. 2 показана блок-схема 14 считывания состояния дороги. Это также может упоминаться как определение изменений состояния дороги, когда различные входные сигналы указывают на изменения состояния дороги. Согласно различным объектам настоящего описания, показатели (RVIs) изменения состояния дороги вычисляются на основе различных изменений состояния дороги или определений состояния.
Как будет описано ниже, показатели изменения состояния дороги формируются на основе исходных результатов измерения датчиком, которые используются для переменных функций транспортного средства, но могут быть математически, но косвенно относиться к характеристикам дорожных условий и могут классифицировать данные вычисления на основе исходных данных измерений датчиком для лучшего сбора данных о том, неровная ли дорога, ровная, извилистая и т.д. Эти заданные значения в конечном счете доступны для оценочной логики 20 для автоматического выбора режима. Оценочная логика 20 затем выдает команду на сохранение или изменения режима на этапе 22 на основе этих заданных значений. Если оценочная логика 20 выдает команду на изменение режима управления, команды для различных подсистем 24, 26, 28 изменяются соответственно.
Исходные данные измерений датчиком для оценки состояния дорожной поверхности могут быть определены посредством системы подвески, показанной в целом на фиг. 3, совместно с данными измерений встроенного датчика для других функций управления. Система 100 подвески включает в себя амортизационную стойку в сборе с пружиной и амортизатор 102, например, со спиральной пружиной, примененной для каждого колеса. На каждой амортизационной стойке в сборе с пружиной расположены датчики 104 высоты подвески, конфигурированные для указания относительного смещения между центром колеса и точкой соединения с корпусом транспортного средства. Показатели изменения состояния дороги могут быть вычислены на основе информации, полученной от четырех датчиков высоты подвески совместно с другими данными измерений и вычисленными переменными, полученными от других измерений датчиков.
Например, данные от датчиков 104 высоты подвески могут использоваться для вычисления вертикального смещения угла колеса/шины с использованием моделей автомобилей, показанных на фиг. 4-5. Это может использоваться для определения вертикальной вибрации или смещения угла колеса/шины под влиянием неровностей дорожной поверхности или изменений дорожной поверхности, или состояний дороги. Датчики 104 высоты подвески также могут использоваться для вычисления движения корпуса транспортного средства в направлениях крена, наклона и рыскания и его величины относительно средней плоскости дорожной поверхности. См., например, патент США № 6684140, который включен сюда в качестве ссылочного материала. Этот патент иллюстрирует одну примерную систему для вычисления величины главного движения корпуса транспортного средства под влиянием неровностей дороги или маневрирования водителем, которая также показана на фиг. 4-5. Датчики подвески транспортного средства совместно с другими измеренными и вычисленными переменными, например, могут быть классифицированы для определения разных категорий состояний дорожной поверхности, которые вызывают движения корпуса транспортного средства в направлениях наклона, крена, подъема и рыскания.
Фиг. 4 иллюстрирует величину Fsusp, которая является критерием высоты подвески. Термин Cs представляет коэффициент демпфирования системы подвески и управляется с помощью электроники системой адаптивного управления для изменения режима работы подвески, то есть, спортивного, нормального, комфортного и т.д. На некоторых транспортных средствах коэффициент Ks пружины может регулироваться при помощи электроники, и могут применяться другие устройства, такие как устройства, производящие дополнительные силы.
На фиг. 4 показана одна модель колеса, называемая моделью четверти. Модели четверти могут быть скомбинированы в модели половины транспортного средства для моделирования крена/наклона, и модели половины транспортного средства могут быть скомбинированы в модели целого транспортного средства для моделирования подъема. Эти модели используются для разработки алгоритмов управления, которые выдают входные данные для вычисления показателей состояния дороги (фиг. 1). Модели половины и целого транспортного средства не показаны.
Как показано, в частности, на фиг. 2, показатели состояния дороги основаны на определениях извилистости дороги 30 и определениях изменений дорожной поверхности 32 (как обозначено, например, датчиками высоты подвески). Результирующие заданные значения включают в себя показатели извилистости дороги и показатели изменений поверхности дороги, которые вычислены на этапе 34 и дополнительно описаны ниже.
Относительно определений 30 извилистости дороги показатель изменения извилистости дороги представляет собой комбинацию скорости транспортного средства и угловой скорости рыскания транспортного средства. Скорость транспортного средства может быть определена датчиками скорости вращения колеса совместно с другими измеренными и вычисленными сигналами, и угловая скорость рыскания может быть получена от электронной системы (ESC) управления устойчивостью, описанной выше. Также могут использоваться данные поперечного ускорения транспортного средства. Вычисления заданных значений извилистости дороги будут описаны дополнительно ниже относительно фиг. 12А-С.
Относительно определений 32 изменений дорожной поверхности или определения неровности дорожной поверхности, определение изменений дорожной поверхности разделено на первичное определение неровности дорожной поверхности и вторичное определение неровности дорожной поверхности. Первичные определения неровности дорожной поверхности включают в себя те, которые вызывают определение движения корпуса транспортного средства посредством определения угла наклона, подъема и угла крена корпуса транспортного средства относительно средней дорожной поверхности, как описано выше со ссылками на фиг. 5 или в патенте США № 6684140. Прохождение величины этих вычисленных переменных через полосовые фильтры будет давать переменные, которые могут использоваться для образования некоторых показателей, называемых первичными показателями движения. Преобразование первичного определения неровности дорожной поверхности в первичные показатели движения описано ниже со ссылками на фиг. 7-8.
Подобным образом, вторичное определение неровности дорожной поверхности и преобразование этих определений во вторичные показатели движения описаны ниже со ссылками на фиг. 9-10.
Перед подробным описанием способов и алгоритмов управления для вычисления показателей изменения состояния дороги, на которую воздействуют показатели изменения состояния дороги, на фиг. 6 показана примерная система управления. В частности, показана примерная электронная подсистема 26 (EPAS) рулевого управления с усилителем. Электронная подсистема 26 рулевого управления с усилителем включает в себя собственный контроллер 200 электронной системы рулевого управления с усилителем, который коммуникативно соединен с контроллером 18 системы адаптивного управления, как описано со ссылками на указанную выше фиг. 1. Контроллер 18 системы адаптивного управления выдает контроллеру 200 электронной системы рулевого управления с усилителем инструкции в зависимости от того, какой режим работы (например, спортивный, нормальный, комфортабельный) системы адаптивного управления определен как надлежащий. На основе этих инструкций контроллер 200 электронной системы рулевого управления с усилителем выдает команды электродвигателю 202 усилителя рулевого механизма. С рулевым приводом 204 соединен электродвигатель 202, используемый для содействия повороту пары колес 206. Рулевой привод 204 может включать в себя, например, механизм реечной передачи, показанный в целом ссылочной позицией 208. Электродвигатель 202 усилителя рулевого механизма конфигурирован для выдачи вращающего момента рулевому механизму для поворота колес 206, когда водитель поворачивает рулевое колесо 210. Например, датчик 212 рулевого колеса определяет положение рулевого колеса 210 и выдает сигнал, указывающий это положение контроллеру 200 электронной системы рулевого управления с усилителем. Контроллер 200 электронной системы рулевого управления с усилителем тогда использует этот сигнал для управления электродвигателем 202, соответственно, для содействия повороту колес 206.
В одном варианте осуществления изобретения используются расчетные показатели изменения состояния дороги для изменения режима работы контроллера системы 18 адаптивного управления, когда изменяются состояния дороги. Это, в свою очередь, изменяет инструкции, выданные контроллеру 200 электронной системы рулевого управления с усилителем, таким образом, что электродвигатель 202 используются для содействия повороту колес 206 другим образом. Например, если показатели изменения состояния дороги указывают изменение режима работы от "нормального" к "спортивному", инструкции, выданные в контроллер электронной системой 200 рулевого управления с усилителем, изменяются соответственно, вызывая соответствующее изменение выходной мощности электродвигателя 202, когда поворачивается рулевое колесо 210.
Другие такие примеры рассматриваются при использовании показателей изменения состояния дороги для управления непрерывно управляемым демпфированием (CCD) 24 и системой 28 управления силовой передачей, когда режим работы изменяется вследствие приема градуированных величин показателей изменения состояния дороги. Например, система 24 непрерывно управляемого демпфирования может включать в себя модуль управления, предназначенный для выдачи команд о необходимой величине демпфирования в соответствии с различными показателями изменения состояния дороги и командами режима работы. Кроме того, система 28 управления силовой передачей может включать в себя модуль управления (модули управления), ответственный за управление двигателем, одним или более электродвигателей, трансмиссией, преобразователем крутящего момента и другими такими механизмами в силовой передаче. Изменение режима работы системы 28 управления силовой передачей, например, может изменять режим переключения трансмиссии или задержки или чувствительности для выходного вращающего момента от двигателя или электродвигателя.
На фиг. 7A и 7B показано примерное вычисление одного из первичных показателей изменения состояния дороги, то есть, показателя наклона-подъема. В этом конкретном примере фиг. 7A иллюстрирует вычисленный сигнал подъема корпуса транспортного средства, который генерируется посредством прохождения через полосовой фильтр величины переменной подъема, полученной от датчиков 104 высоты подвески множества колес. Этот сигнал количественно указывает движение подъема корпуса транспортного средства при движении по дорожной поверхности. Также может генерироваться подобный сигнал, который указывает наклон корпуса транспортного средства посредством сравнения результатов измерения высоты подвески для множества колес.
На фиг. 7A показаны два пороговых значения, а именно, первое пороговое значение (пороговое значение 1) и второе пороговое значение (пороговое значение 2). Эти два пороговых значения используются для определения после прохождения полосового фильтра величины вычисленных сигналов подъема и наклона корпуса транспортного средства для получения показателя наклона-подъема. Эти пороговые значения также могут настраиваться по всей платформе транспортного средства и также могут настраиваться на основе того, в каком режиме вождения в данный момент движется транспортное средство. В примере, показанном на фиг. 7A, первое пороговое значение составляет около 0,01 м, тогда как второе пороговое значение составляет около 0,005 м.
Вычисленная градуированная величина, показанная на фиг. 7B, составляет или 0, или 1. Дополнительные целочисленные показатели могут быть даны при дальнейшем описании относительно других вариантов осуществления изобретения. Когда высота подвески остается ниже первого порогового значения, например, между t=0 и t=10 секунд, показатель наклона-подъема остается на уровне 0. Приблизительно при t=10 секунд высота подвески превышает первое пороговое значение, также называемое пороговым значением активации. Превышение порогового значения активации вызывает изменение показателя подъем-наклон изменения состояния дороги от 0 до 1, или "активизацию". Градуированная величина тогда остается на уровне 1 до снижения сигнала высоты подвески ниже второго порогового значения. В варианте осуществления изобретения, показанном на фиг. 7А-7В, градуированная величина остается на уровне 1, пока сигнал высоты подвески не останется ниже второго порогового значения в течение заданного времени (например, 2 секунды). Это аналогично гистерезису, применяемому для пороговых значений, таким образом, что создается переходная задержка от 1 до 0 для вычисления частоты входных сигналов плавности хода, обычно наблюдаемых при движении по дорожной поверхности. Например, как можно видеть, градуированная величина остается на уровне 1 до достижения приблизительно t=16 секунды вследствие сигнала высоты подвески, который ниже второго порогового значения от приблизительно t=14 секунд до t=16 секунд. После этого градуированная величина показателя изменения состояния дороги снова увеличивается назад до 1 при приблизительно t=17 секунд из-за того, что сигнал высоты подвески снова превышает первое пороговое значение.
На фиг. 8A представлены первичные сигналы подъема и наклона, выдаваемые датчиками высоты подвески после прохождения через полосовой фильтр, и результирующие величины сигналов, которые вызваны неровностью относительно наклона и подъема. После того, как эти сигналы были подвергнуты функции 20 оценки, результирующие дискретизированные сигналы представляют собой сигналы, показанные на фиг. 8B. На фиг. 8B показан результат функции 20 оценки, который активизирует контроллер для определения того, какой режим следует ввести на этапе 22. Например, первоначально (например, между 0 и 1 секундой) дорога относительно ровная при поддержании сигнала запроса режима, показанного на фиг. 8B, на уровне по умолчанию, например, на уровне 5. Когда величина первичного сигнала подъема увеличивается, результирующий запрос режима работы подвески изменяется с приращением от 5 до 4 и до 3. Продолжительность времени, в течение которого запрос режима поддерживается на каждом дискретном уровне, может быть калибрована таким образом, что темп перехода между этапами может контролироваться. Посредством перехода между этапами контроллер может определять, в какой режим необходимо войти на основе того, на каком ступенчатом уровне проходит сигнал запроса режима работы подвески.
В варианте осуществления изобретения, показанном на фиг. 8A и 8B, когда темп изменения величины подъема транспортного средства колеблется, запрос режима колеблется соответственно. Например, большие величины показателей состояний дорожной поверхности вызывают резкое пиковое отклонение отфильтрованных сигналов наклона до величин приблизительно 12 секунд, 17 секунд и 22 секунды. В эти моменты результирующий режим работы подвески изменяется до ступенчатого уровня 8 и удаляется от уровня 5 по умолчанию. Результирующий сигнал может быть послан для указания автоматического предпочтения того, чтобы транспортное средство входило в "спортивный" режим, а не в режим управления по умолчанию, когда запрос режима находится на ступенчатом уровне 5.
Показатель изменения состояния дороги, определенный на фиг. 7B, является просто примерным для одного первичного показателя состояния дороги, то есть, показателя наклона-подъема. Другая первичная градуированная величина, то есть показатель крена, может быть вычислена с использованием сигналов высоты подвески и алгоритмов, использующих такие сигналы для указания крена транспортного средства. Показатель изменения состояния дороги по крену является другой первичной градуированной величиной.
Вторичные градуированные величины также вычисляются, как описано выше относительно фиг. 2. Вторичный показатель плавности хода также может характеризовать неровность дороги. На фиг. 9A показан исходный сигнал высоты подвески, и на фиг. 9B показана результирующая величина показателя плавности хода на основе высоты подвески. Вторичный сигнал плавности хода или неровности дороги вычисляется на основе величины сигнала после прохождения через полосовой фильтр, определенной посредством сравнения результатов измерения высоты подвески для множества колес. Подобно показанному на фиг. 7А-7В, снова получены два пороговых значения. Когда высота подвески (вторичный сигнал плавности хода или неровности дороги) превышает первое пороговое значение (например, 0,2 м), градуированная величина остается на уровне 1 или остается "активной". Градуированная величина не изменяется до 0 (или "дезактивирующего" значения), пока высота подвески не опускается ниже второго порогового значения (например, 0,1 м). В этом конкретном варианте осуществления изобретения вторичный показатель плавности хода не вычисляется с переходной задержкой. Другими словами, как только высота подвески падает ниже второго порогового значения, вторичный показатель плавности хода опускается до 0 без первого требования того, чтобы высота подвески оставалась ниже второго порогового значения в течение некоторого периода времени. В других практических вариантах применения, таких как движение по замерзшему подъему, может быть применена переходная задержка.
На фиг. 10 показан комбинированный график вторичных сигналов плавности хода или неровности дороги, определенной датчиками высоты подвески, и результирующего вторичного контекстного сигнала плавности хода, проходящего от ступенчатого уровня от 5 до 4, а также результирующих сигналов запроса режима работы подвески, уменьшающихся от ступенчатого уровня по умолчанию от 5 до 2. На основе конкретных характеристик этой дороги, по которой происходит движение, выходной запрос режима может автоматически изменяться от режима управления по умолчанию до другого режима управления на основе величины сигналов высоты подвески.
Показатели изменения состояния дороги, вычисленные и использованные как показано на фиг. 7-10, являются показателями изменений поверхности дороги, показанными на фиг. 2, вычисленными на основе состояний 32 дорожной поверхности. На фиг. 2 также показаны сигналы, относящиеся к извилистости 30 дороги, которые могут быть вычислены и преобразованы в показатель извилистости дороги 34. На фиг. 11-12 показаны такие вычисления показателя извилистости дороги.
На фиг. 11A извилистость дороги вычислена на основе оценки поперечного ускорения транспортного средства, как описано выше. Это конкретное вычисление игнорирует знак сигнала (направление поворота), фокусируется на чистой величине (положительной или отрицательной) сигнала и включает в себя фильтрацию. Когда величина сигнала повышается выше порогового значения и остается выше порогового значения в течение некоторого времени, показатель извилистости дороги находится на уровне 1, а не на уровне 0 по умолчанию.
Сигнал извилистости дороги, нанесенный на график на фиг. 11В, создан посредством комбинации угловой скорости рыскания транспортного средства и скорости транспортного средства. Например, если транспортное средство сохраняет постоянную скорость, то более высокая угловая скорость рыскания будет указывать на более сильную извилистость. В этом варианте осуществления изобретения показано только одно пороговое значение. Когда извилистость дороги превышает пороговое значение, показатель извилистости дороги изменяется от 0 до 1. Этот показатель изменения состояния дороги не изменяется обратно до 0, пока извилистость дороги не снизится ниже порогового значения в течение заданного периода времени.
Следует понимать, что, как очевидно из разностей между графическими представлениями в настоящем описании, использование пороговых значений может изменяться в разных вариантах осуществления изобретения. Могут существовать одно или множество пороговых значений, и показатель изменения состояния дороги может изменяться между 0 и 1 (или с большим количеством этапов) соответственно, когда сигналы извилистости дороги или изменения дорожной поверхности превышают и снижаются ниже одного или двух пороговых значений. Кроме того, временная задержка или гистерезис может применяться только в некоторых вариантах осуществления изобретения. Например, варианты осуществления изобретения, показанные на фиг. 7А-7В, включают в себя временную задержку таким образом, что сигнал высоты подвески должен быть ниже второго порогового значения в течение некоторого периода времени для соответствующего показателя изменения состояния дороги для изменения от 1 до 0; такая временная задержка не присутствует в вариантах осуществления изобретения, показанных на фиг. 9А-9В.
На фиг. 12A показано воспроизведение сигнала извилистости дороги и связанного с ним показателя извилистости дороги. На фиг. 12B и 12C показано изменение команд для электронной системы рулевого управления с усилителем и системы непрерывно управляемого демпфирования на основе изменения извилистости дороги.
С использованием идей настоящего изобретения можно отличать, индексировать, дискретизировать или иначе преобразовывать исходные сигналы, чувствительные к условиям движения, в некоторые показатели изменения состояния дороги, которые получены в целочисленной форме. Другими словами, сигналы извилистости дороги или сигналы изменения дорожной поверхности могут быть преобразованы в дискретные величины ("дискретизированные"), такие как два или больше целых чисел, которые представляют показатели изменения состояния дороги (RVIs). По меньшей мере, один процессор тогда проводит оценку алгоритма, который принимает во внимание каждый из показателей изменения состояния дороги, когда происходит управление транспортным средством. На основе комбинаций и/или изменений определенных показателей изменения состояния дороги, по меньшей мере, один процессор может соответственно изменять режим работы транспортного средства (например, "спортивный", "нормальный", "комфортный" и т.д.) таким образом, что команды, выданные компонентам подсистем (непрерывно управляемое демпфирование, рулевое управление с усилителем или компонентам силовой передачи) изменяются. Коротко, система конфигурирована для дискретизации или индексации сигналов извилистости дороги и сигналов состояния дорожной поверхности и изменения режима работы подсистемы на основе дискретизированных или градуированных величин.
Описанные здесь процессы, способы или алгоритмы могут быть введены/осуществляться устройством обработки, контроллером или компьютером, который может включать в себя любой существующий программируемый электронный блок управления или выделенный электронный блок управления. Подобным образом, процессы, способы или алгоритмы могут храниться как данные и инструкции, выполняемые контроллером или компьютером во многих формах, включающих в себя, но не ограничиваясь ими, информацию, постоянно сохраненную на неперезаписываемых носителях информации, таких как постоянные запоминающие устройства, и информацию, сохраняемую с возможностью перезаписи на перезаписываемых носителях информации, таких как дискеты, магнитные ленты, компакт-диски, оперативные запоминающие устройства и другие магнитные и оптические носители. Процессы, способы или алгоритмы также могут быть осуществлены в выполняемом программным обеспечением объекте. В альтернативном варианте процессы, способы или алгоритмы могут быть осуществлены полностью или частично с использованием соответствующих аппаратных компонентов, таких как специализированные интегральные схемы (ASICs), программируемые вентильные матрицы (FPGAs), конечные автоматы, контроллеры или другие аппаратные компоненты или устройства, или комбинация аппаратных средств, программного обеспечения и микропрограммных компонентов.
Хотя выше описаны примерные варианты осуществления изобретения, эти варианты осуществления изобретения не предусматривают описания всех возможных форм, охваченных формулой изобретения. Формулировки, используемые в описании, являются формулировками описания, не вносящими ограничений, и понятно, что могут быть сделаны различные изменения без отхода от сущности и объема изобретения. Как описано выше, признаки различных вариантов осуществления изобретения могут быть скомбинированы для формирования других вариантов осуществления изобретения, которые не могут быть описаны или проиллюстрированы в явном виде. Хотя различные варианты осуществления изобретения, возможно, были описаны как дающие преимущества или предпочтительные относительно других вариантов осуществления изобретения или вариантов известного уровня техники относительно одной или более желательных характеристик, специалистам в данной области техники будет понятно, что один или более признаков или характеристик могут не достигать заданных признаков системы, которые зависят от конкретного варианта применения и варианта выполнения. Эти признаки могут включать в себя (но не ограничены ими): стоимость, прочность, долговечность, затраты полного срока эксплуатации, конкурентоспособность, внешний вид, упаковка, размер, эксплуатационная надежность, вес, возможности производства, простоту сборки и т.д. Как таковые, варианты осуществления изобретения, описанные как менее желательные, чем другие варианты осуществления изобретения или варианты осуществления изобретения известного уровня техники относительно одной или более характеристик, не выходят за рамки объема изобретения и могут быть желательными для конкретных вариантов применения.

Изобретение относится к автоматическому регулированию различных подсистем в транспортном средстве. Система управления транспортным средством содержит контроллер адаптивного управления вождением, запрограммированный с возможностью управления подсистемой непрерывно управляемого демпфирования подвески в соответствии с режимом работы, множество датчиков, сконфигурированных с возможностью считывания состояний дорожной поверхности, по которой движется транспортное средство, и по меньшей мере один контроллер, запрограммированный для изменения режима работы на основе дискретизации состояний дорожной поверхности на более чем две дискретные величины. Система управления транспортным средством также содержит электронный контроллер регулирования рулевого управления с усилителем, запрограммированный с возможностью управления электронной подсистемой рулевого управления с усилителем в соответствии с режимом работы. Транспортное средство содержит контроллер управления силовой передачей, запрограммированный с возможностью работы во множестве режимов и снабжения силовой передачи рабочими командами, которые изменяются в соответствии с тем, в каком одном из режимов работает контроллер управления силовой передачей. Достигается автономное определение настройки для каждой подсистемы транспортного средства. 3 н. и 15 з.п. ф-лы, 18 ил.
1. Система управления транспортным средством, содержащая:
контроллер адаптивного управления вождением, запрограммированный с возможностью управления подсистемой непрерывно управляемого демпфирования подвески в соответствии с режимом работы;
множество датчиков, сконфигурированных с возможностью считывания состояний дорожной поверхности, связанных с дорожной поверхностью, по которой движется транспортное средство; и
по меньшей мере один контроллер, запрограммированный для изменения режима работы на основе дискретизации состояний дорожной поверхности на более чем две дискретные величины.
2. Система управления по п. 1, в которой по меньшей мере один контроллер дополнительно запрограммирован для дискретизации считанных состояний дорожной поверхности на первую дискретную величину, основанную на считанных состояниях дорожной поверхности, превышающих первое пороговое значение.
3. Система управления по п. 2, в которой по меньшей мере один контроллер дополнительно запрограммирован для дискретизации считанных состояний дорожной поверхности на вторую дискретную величину, основанную на считанных состояниях дорожной поверхности, которые меньше второго порогового значения.
4. Система управления по п. 2, в которой по меньшей мере один контроллер дополнительно запрограммирован для дискретизации считанных состояний дорожной поверхности на вторую дискретную величину, основанную на считанных состояниях дорожной поверхности, которые меньше второго порогового значения в течение заданного периода времени.
5. Система управления по п. 1, в которой дискретизация включает в себя градуированные величины, указывающие подъем, наклон или крен транспортного средства.
6. Система управления по п. 1, в которой множество датчиков включает в себя множество датчиков высоты подвески, каждый из которых сконфигурирован с возможностью считывания относительных движений между кузовом транспортного средства и связанным с ним узлом колеса/шины, и в которой сигналы, генерируемые датчиками высоты подвески, относятся к состояниям дорожной поверхности.
7. Система управления по п. 1, в которой множество датчиков дополнительно сконфигурированы с возможностью считывания извилистости дороги, связанной с дорожной поверхностью, и в которой по меньшей мере один контроллер дополнительно запрограммирован для изменения режима работы на основе дискретизации считанной извилистости дороги.
8. Система управления транспортным средством, содержащая:
электронный контроллер регулирования рулевого управления с усилителем, запрограммированный с возможностью управления электронной подсистемой рулевого управления с усилителем в соответствии с режимом работы;
множество датчиков, сконфигурированных с возможностью считывания состояний дорожной поверхности, связанных с дорожной поверхностью, по которой движется транспортное средство; и
по меньшей мере один контроллер, запрограммированный с возможностью изменения режима работы на основе дискретизации состояний дорожной поверхности на более чем две дискретные величины.
9. Система управления по п. 8, в которой множество датчиков дополнительно сконфигурированы с возможностью считывания извилистости дороги, связанной с дорожной поверхностью, и в которой по меньшей мере один контроллер дополнительно запрограммирован с возможностью изменения режима работы на основе дискретизации считанной извилистости дороги.
10. Система управления по п. 8, в которой по меньшей мере один контроллер дополнительно запрограммирован с возможностью дискретизации считанных состояний дорожной поверхности на первую дискретную величину, основанную на считанных состояниях дорожной поверхности, превышающих первое пороговое значение.
11. Система управления по п. 10, в которой по меньшей мере один контроллер дополнительно запрограммирован с возможностью дискретизации считанных состояний дорожной поверхности на вторую дискретную величину, основанную на считанных состояниях дорожной поверхности, которые меньше второго порогового значения.
12. Система управления по п. 10, в которой по меньшей мере один контроллер дополнительно запрограммирован с возможностью дискретизации считанных состояний дорожной поверхности на вторую дискретную величину, основанную на считанных состояниях дорожной поверхности, которые меньше второго порогового значения в течение заданного периода времени.
13. Транспортное средство, содержащее:
контроллер управления силовой передачей, запрограммированный с возможностью работы во множестве режимов и снабжения силовой передачи рабочими командами, которые изменяются в соответствии с тем, в каком одном из режимов работает контроллер управления силовой передачей;
множество датчиков, сконфигурированных с возможностью считывания состояний дорожной поверхности, связанных с дорожной поверхностью, по которой движется транспортное средство; и
по меньшей мере один контроллер, запрограммированный с возможностью изменения одного из режимов, в котором работает контроллер управления силовой передачей, на основе дискретизации считанных состояний дорожной поверхности на более чем две дискретные величины.
14. Транспортное средство по п. 13, в котором множество датчиков включает в себя множество датчиков высоты подвески, каждый из которых сконфигурирован с возможностью считывания смещения соответствующего колеса, и в котором сигналы, генерируемые датчиками высоты подвески, относятся к состояниям дорожной поверхности.
15. Транспортное средство по п. 13, в котором множество датчиков дополнительно сконфигурировано с возможностью считывания извилистости дороги, связанной с дорожной поверхностью.
16. Транспортное средство по п. 13, в котором по меньшей мере один контроллер дополнительно запрограммирован с возможностью дискретизации считанных состояний дорожной поверхности на первую дискретную величину, основанную на считанных состояниях дорожной поверхности, превышающих первое пороговое значение.
17. Транспортное средство по п. 16, в котором по меньшей мере один контроллер дополнительно запрограммирован с возможностью дискретизации считанных состояний дорожной поверхности на вторую дискретную величину, основанную на считанных состояниях дорожной поверхности, которые меньше второго порогового значения.
18. Транспортное средство по п. 16, в котором по меньшей мере один контроллер дополнительно запрограммирован с возможностью дискретизации считанных состояний дорожной поверхности на вторую дискретную величину, основанную на считанных состояниях дорожной поверхности, которые меньше второго порогового значения в течение заданного периода времени.
| US 2012203424 A1, 09.08.2012 | |||
| US 6202020 B1, 13.03.2001 | |||
| JP 2014035279 A, 24.02.2014. |

