ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится в целом к предельным величинам параметров управления транспортными средствами и в частности к системам и способам обеспечения предельных величин параметров управления транспортными средствами при использовании автоматического режима управления.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Как известно, в складских помещениях используются вильчатые погрузчики и/или другие транспортные средства для перемещения различных грузов внутри склада. Соответственно, во многих технических решениях используется оператор транспортного средства, который решает, какие грузы и в какие места необходимо перемещать. Хотя операторы транспортных средств могут осуществлять их навигацию для выполнения поставленных задач, однако часто операторы совершают ошибки, выбирают неоптимальные маршруты или иным образом замедляют выполнение задач по перемещению грузов. В связи с этим многие технические решения предусматривают использование полуавтоматического и/или полностью автоматического режима управления транспортными средствами. Хотя полуавтоматический или полностью автоматический режим управления может обеспечивать дополнительные возможности, однако часто количество ошибок в системе увеличивается из-за отсутствия связи между навигационной системой и системой управления транспортного средства.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
В настоящем изобретении предлагается система обеспечения предельных величин параметров для транспортного средства. В одном из вариантов система содержит навигационную систему и транспортное средство, содержащее запоминающее устройство, в котором записана программа. Варианты системы обеспечивают: получение указания на автоматическое управление транспортным средством; прием маршрута от навигационной системы, обеспечивающего перемещение транспортного средства в пункт назначения для выполнения назначенного задания; определение предельной величины параметра для транспортного средства, которая соответствует его текущему состоянию. В некоторых вариантах обеспечивается: передача предельной величины параметра из модуля (VCM) управления транспортным средством в модуль навигации (NCM); определение с использованием модуля NCM команды автоматического управления в соответствии с пунктом назначения и с учетом предельной величины параметра для транспортного средства; передача команды автоматического управления в двигатель транспортного средства.
В изобретении также предлагается соответствующий способ. В некоторых вариантах способа обеспечивается: прием назначенного задания, относящегося к перемещению груза в пункт назначения, определяемый трехмерными координатами; определение маршрута, обеспечивающего перемещение транспортного средства в указанный пункт назначения для выполнения назначенного задания; определение предельной величины параметра в соответствии с текущим состоянием транспортного средства. Некоторые варианты способа включают: формирование команды автоматического управления в соответствии с трехмерными координатами пункта назначения и с учетом предельной величины параметра; передачу команды автоматического управления на транспортное средство.
В изобретении также предлагаются варианты транспортного средства. В некоторых вариантах транспортное средство содержит: запоминающее устройство, в котором записана программа, при выполнении которой устройством обработки информации обеспечивается выполнение по меньшей мере следующих стадий: прием транспортным средством указания на автоматическое управление; прием маршрута для перемещения в пункт назначения; определение предельной величины параметра для транспортного средства, которая соответствует его текущему состоянию. В некоторых вариантах выполнение программы обеспечивает: передачу из модуля (VCM) управления транспортным средством в модуль (NCM) навигации предельной величины параметра для транспортного средства; использование модуля NCM для навигации транспортного средства в пункт назначения, соблюдая указанную предельную величину параметра.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Рассмотренные в нижеприведенном описании варианты являются всего лишь иллюстрациями, которые не должны рассматриваться как ограничения объема изобретения, определяемого его формулой. Нижеприведенное подробное описание иллюстративных вариантов осуществления настоящего изобретения лучше всего можно понять при рассмотрении вместе с прилагаемыми чертежами, на которых одинаковые элементы указаны одинаковыми ссылочными номерами, и на которых показано:
Фигура 1 - схема вычислительной среды для обеспечения предельных величин параметров управления транспортным средством по одному или нескольким рассмотренным вариантам.
Фигура 2 - схема среды, для которой обеспечиваются предельные величины параметров управления транспортным средством по одному или нескольким рассмотренным вариантам.
Фигура 3 - схема вычислительной среды для обеспечения алгоритма работы модуля управления транспортным средством по одному или нескольким рассмотренным вариантам.
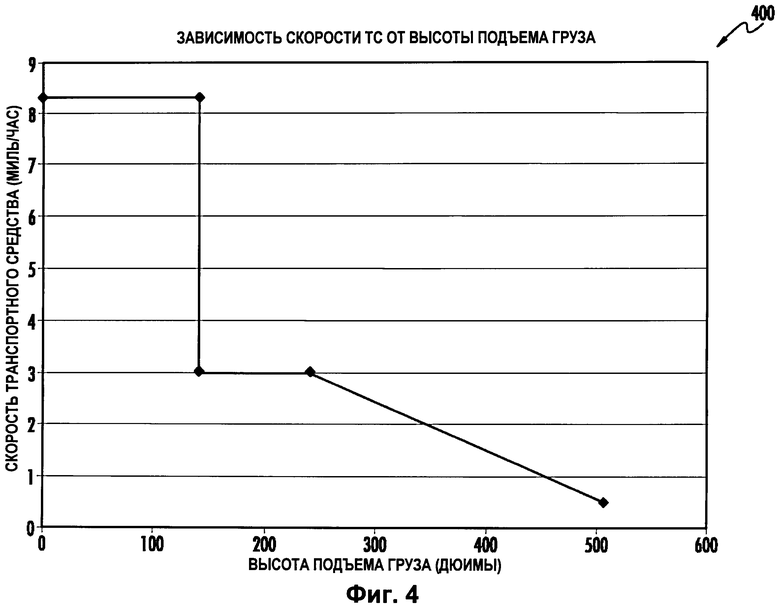
Фигура 4 - график зависимости предельной величины скорости движения от высоты подъема груза по одному или нескольким рассмотренным вариантам.
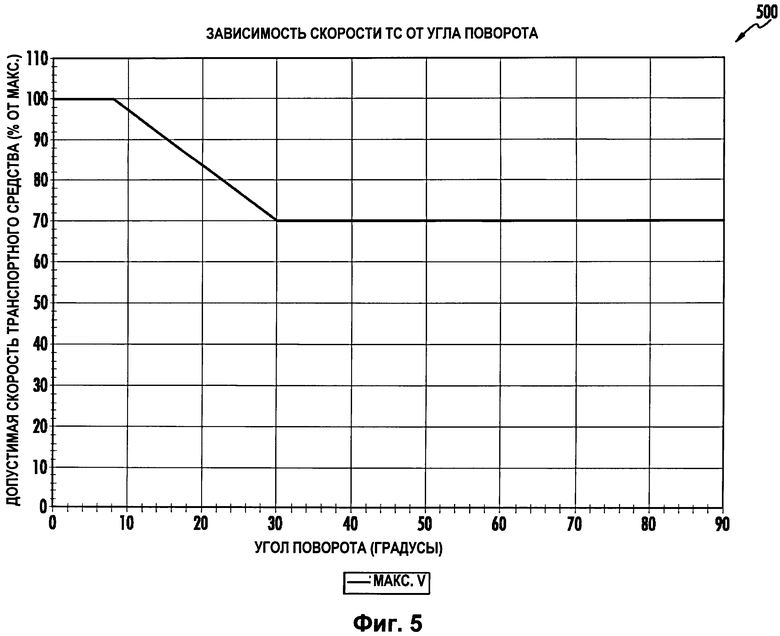
Фигура 5 - график зависимости максимальной величины скорости движения транспортного средства от угла поворота по одному или нескольким рассмотренным вариантам.
Фигура 6 - блок-схема алгоритма использования предельных величин параметров управления транспортным средством по одному или нескольким рассмотренным вариантам.
Фигура 7 - блок-схема другого алгоритма использования предельных параметров управления транспортным средством по одному или нескольким рассмотренным вариантам.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
На фигуре 1 приведена схема вычислительной системы для обеспечения предельных величин параметров управления транспортным средством по одному или нескольким вариантам, рассмотренным в настоящем описании. Как показано на схеме фигуры 1, связь между навигационной системой 102, удаленным вычислительным устройством 104 и транспортным средством 106 может обеспечиваться с помощью сети 100. Сеть 100 может включать проводную и/или беспроводную локальную вычислительную сеть, глобальную вычислительную сеть и/или другой тип сети, обеспечивающей обмен информацией. Навигационная система 102 может быть сконфигурирована как сервер или другое вычислительное устройство и может быть расположена в складском помещении или в другом месте. Навигационная система 102 может быть сконфигурирована для передачи навигационной информации на транспортное средство 106 и/или прием от него навигационных данных. Дополнительно может использоваться удаленное вычислительное устройство 104, которое может быть реализовано как управляющее вычислительное устройство для обработки заданий, которые должны выполняться транспортными средствами. Эти задания могут определять местонахождение продукта, который необходимо переместить в другое место, и/или обеспечивать другую необходимую информацию. Получив информацию назначенного задания, навигационная система 102 и/или удаленное вычислительное устройство 104 могут определить транспортное средство для выполнения этого задания. Навигационная система 102 дополнительно может определять порядок (приоритеты) выполнения заданий определенным транспортным средством 106. Навигационная система 102 может обмениваться информацией с транспортным средством 106 для определения его местонахождения. Имея информацию о местонахождении транспортных средств 106, навигационная система 102 может более эффективно назначать задания этим транспортным средствам. Кроме того, обмен информацией между навигационной системой 102 и транспортным средством 106 может включать передачу на транспортное средство 106 информации о пункте назначения и/или о маршруте. Информация о маршруте может содержать линии и дуги пути, по которому должно пройти транспортное средство 106, чтобы из текущего местонахождения попасть в пункт назначения. Однако в некоторых вариантах транспортное средство 106 получает только координаты заданного пункта назначения и само определяет маршрут для перемещения в этот пункт назначения.
В систему входит также удаленное вычислительное устройство 104. Это устройство 104 также может быть сконфигурировано как сервер или другое вычислительное устройство для передачи в навигационную систему 102 назначенных заданий и/или другой информации. В некоторых вариантах удаленное вычислительное устройство 104 может находиться в том же помещении, что и навигационная система 102, а в других вариантах удаленное вычислительное устройство 104 и навигационная система 102 могут находиться в разных местах. Аналогично, в зависимости от конкретного варианта удаленное вычислительное устройство 104 может быть сконфигурировано для обслуживания одной или нескольких различных сред и для обмена информацией с несколькими разными навигационными системами.
Как показано на фигуре 1, система включает также транспортное средство 106. Транспортное средство 106 может быть складским транспортным средством, таким как, например, вильчатый погрузчик. Транспортное средство 106 может содержать одну или несколько систем управления: систему рулевого управления, тормозную систему, систему управления тягой и т.п.Транспортное средство 106 также содержит интерфейс пользователя, датчики определения местонахождения (лазерные датчики, оптические датчики и т.п.), а также вычислительную инфраструктуру ПО, которая может включать модуль 112 управления транспортным средством (VCM) и навигационный модуль 114 (NCM). Как это будет описано ниже более подробно, модуль VCM 112 может обеспечивать оператору возможность управления транспортным средством в ручном режиме. Модуль NCM 114 может быть сконфигурирован для передач команд управления для обеспечения возможности работы транспортного средства 106 в автоматическом режиме. Обмен информацией между модулями VCM 112 и NCM 114 и координация их работы обеспечивается интерфейсом управления навигацией.
На фигуре 2 приведена схема 200 среды, для которой обеспечиваются предельные величины параметров управления транспортным средством по одному или нескольким нижеописанным вариантам; Как показано на фигуре 2, схема 200 среды относится к складскому помещению, в котором размещены товары (грузы) 202. Товары могут быть расположены упорядоченно, не только по горизонтали на полу помещения (в направлениях осей X и Y), но и по вертикали (в направлении оси Z). Как уже указывалось, транспортное средство 106 может работать в ручном режиме управления оператором, который вводит команды управления. Оператор может обеспечивать навигацию транспортного средства в ручном режиме для перемещения его в заданный пункт, выполнение поставленного задания и переход к следующему заданию.
Если на транспортное средство 106 передана команда управления на работу в автоматическом режиме, оно может определить свое состояние и работать в автоматическом режиме. Таким образом, автоматический режим управления транспортным средством 106 может осуществляться модулем NCM 114, навигационной системой 102, оператором навигационной системы и/или другим внешним источником в результате определения варианта эффективного управления транспортным средством 106 для выполнения задания и передачи команды управления в соответствии с эффективностью управления, состоянием транспортного средства и конкретным заданием. Имея эту информацию, транспортное средство 106 может перемещаться в заданный пункт назначения, выполнять назначенное задание и переходить к выполнению следующего задания.
В одном из примеров, если транспортное средство 106 работает в автоматическом режиме управления, оно может получить задание, пункт назначения (адрес D212) и/или маршрут, по которому можно попасть в пункт назначения. В соответствии с полученной информацией транспортное средство 106 может рассчитать маршрут для перемещения в заданный пункт назначения по адресу D212 и затем выполнить поставленное задание. В этом конкретном примере в соответствии с заданием транспортное средство 106 должно забрать груз, находящийся по адресу D212. Затем транспортное средство 106 из своего текущего местонахождения может осуществлять навигацию по намеченному маршруту с использованием датчиков и информации карты. В некоторых вариантах на транспортном средстве 106 может быть установлен оптический датчик. Оптический датчик может определять положение транспортного средства 106 относительно верхних светильников. В соответствии с этой информацией и/или другой информацией (получаемой от лазерного датчика, от одометра и т.д.) транспортное средство 106 (и/или навигационная система 102) может определять, что оно находится на маршруте.
При работе транспортного средства 106 в автоматическом режиме управления оно может получать один или несколько сигналов управления, передаваемых из модуля NCM 114 в модуль VCM 112. Для исключения возможности передачи модулем NCM 114 в модуль VCM 112 команды, которая нарушает заданную предельную величину параметра управления, модули VCM 112 и NCM 114 могут обмениваться информацией о предельных величинах параметров управления транспортным средством. В частности, в соответствии с заданным весом груза, высотой подъема вильчатого захвата и/или другими параметрами для транспортного средства 106 может устанавливаться предельная величина ускорения, которую оно не может превышать. Аналогично, транспортное средство 106 может иметь предельные величины для высоты подъема вильчатого захвата, ускорения подъема груза, скорости подъема груза и т.п., а также для транспортного средства 106 может быть задана предельная величина для рулевого управления. Если транспортное средство 106 имеет одно или несколько вспомогательных приспособлений, для каждого приспособления могут быть определены: нижняя предельная величина, предельная величина скорости, верхняя предельная величина и/или другие предельные величины.
Эти предельные величины параметров могут быть легко реализованы, когда транспортное средство 106 работает в ручном режиме, однако в автоматическом режиме часто может быть передана команда на действие, которое недопустимо. Соответственно, модуль VCM 112 может передавать информацию о предельных величинах параметров в модуль NCM 114 для исключения неопределенностей внутри транспортного средства 106.
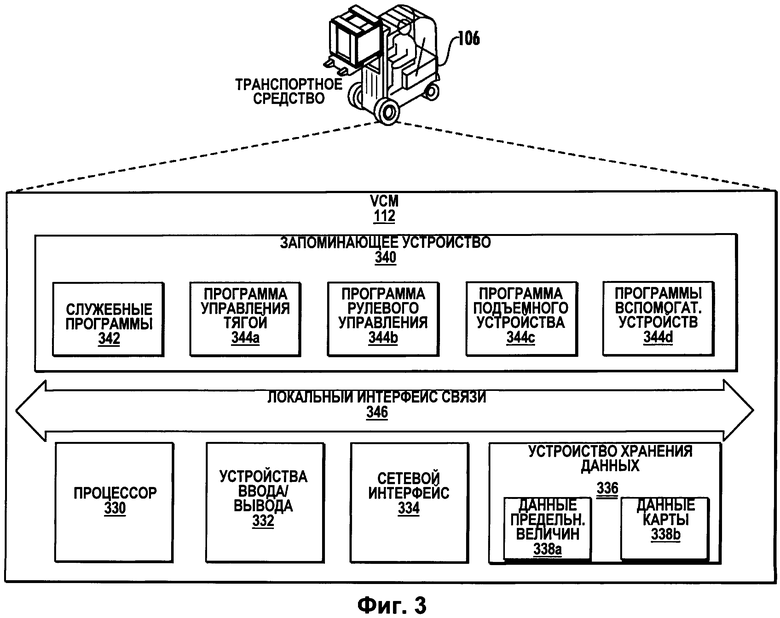
На фигуре 3 приведена схема вычислительной среды для обеспечения алгоритма работы модуля VCM 112 по одному или нескольким вариантам осуществления изобретения. В рассматриваемом варианте модуль VCM 112 содержит процессор 330, устройство 332 ввода/вывода, устройство 336 хранения данных (в нем записана информация 338а о предельных величинах параметров, информация 338b карты и/или другие данные) и запоминающее устройство 340. Информация 338а о предельных величинах параметров может содержать одну или несколько таких величин, которые могут действовать, когда транспортное средство 106 работает. В частности, когда транспортное средство 106 поворачивается, его максимальная скорость может быть ограничена. Когда вильчатый захват транспортного средства 106 поднят, его максимальная скорость может быть ограничена. Также могут использоваться и предельные величины и других параметров.
Информация 338b карты может включать информацию общей карты среды, как показано на фигуре 2, а также местонахождение товаров, маршруты к этим товарам и т.п. Запоминающее устройство 140 может быть энергозависимым и/или энергонезависимым устройством и может включать оперативное запоминающее устройство (включая статическое ОЗУ с произвольной выборкой, динамическое ОЗУ с произвольной выборкой и другие типы ОЗУ), флэш-память, защищенное ЗУ, регистры, компакт-диски, диски DVD и другие машиночитаемые носители информации. В зависимости от конкретного варианта машиночитаемый носитель информации может находиться внутри модуля VCM 112 и/или снаружи.
Кроме того, запоминающее устройство 140 может содержать служебные программы 342, программу 344а управления тягой, программу 344b рулевого управления, программу 344 с управления подъемом груза и программу 344d управления вспомогательными приспособлениями. Служебные программы 342 могут включать операционную систему и/или другие программы для управления работой компонентов модуля VCM 112. Программа 344а управления тягой может содержать несколько алгоритмов управления тягой и различные параметры для обеспечения оптимального управления тягой транспортного средства 106. Программа 344b рулевого управления может содержать несколько алгоритмов управления направлением движения и различные параметры для обеспечения оптимального управления направлением движения транспортного средства 106. Программа 344с управления подъемом груза может содержать несколько алгоритмов и различные параметры для обеспечения оптимального управления подъемными операциями транспортного средства 106. Программа 344d управления вспомогательными приспособлениями может содержать несколько алгоритмов и различные параметры для обеспечения управления вспомогательными приспособлениями транспортного средства 106. На фигуре 3 также показан локальный интерфейс 346 связи, который может быть реализован как шина или другой коммуникационный интерфейс для обеспечения обмена информацией между компонентами модуля VCM 112.
Процессор 330 может содержать любой компонент обработки информации, способный принимать и выполнять команды, например, из устройства 336 хранения данных и/или из запоминающего устройства 340. Устройство 332 ввода/вывода может быть сконфигурировано для сопряжения с монитором, позиционирующим устройством, клавиатурой, сенсорным экраном, мышью, принтером, устройством получения изображений, микрофоном, громкоговорителем, гироскопом, компасом и/или другими устройствами для приема, передачи и/или представления данных. Сетевой интерфейс 334 может включать любое проводное или беспроводное сетевое оборудование, включая антенну, модем, LAN-порт, карту Wi-Fi, карту WiMax, оборудование мобильной связи и/или другое оборудование для обмена информацией с другими сетями и/или устройствами. Сетевой интерфейс 334 может обеспечивать связь между модулем VCM 112 и другими вычислительными устройствами.
Следует понимать, что компоненты, показанные на фигуре 3, являются всего лишь примерами и не должны рассматриваться как ограничения объема настоящего изобретения. Хотя компоненты на фигуре 3 показаны находящимися внутри модуля VCM 112, однако это всего лишь пример. В некоторых вариантах один или несколько компонентов могут находиться снаружи модуля VCM 112. Следует также понимать, что хотя модуль VCM 112 показан на фигуре 3 как одно устройство, это всего лишь пример. В некоторых вариантах программа 344а управления тягой, программа 344b рулевого управления, программа 344с управления подъемом груза и/или программа 344d управления вспомогательными приспособлениями могут находиться в разных устройствах. Кроме того, хотя модуль VCM 112 показан с программой 344а управления тягой, программой 344b рулевого управления, программой 344с управления подъемом груза и программой 344d управления вспомогательными приспособлениями, реализованными как отдельные компоненты, это всего лишь пример. В некоторых вариантах все вышеуказанные функциональные возможности могут быть обеспечены в модуле VCM 112 одной программой. Аналогичные компоненты могут быть также включены в модуль NCM 114, в навигационную систему 102 и в удаленное вычислительное устройство для обеспечения вышеуказанных функциональных возможностей.
На фигуре 4 приведен график 400 зависимости предельной величины скорости движения от высоты подъема груза по одному или нескольким вариантам осуществления изобретения. Как можно видеть на графике 400, максимальная скорость движения транспортного средства 106 составляет 8,5 миль/час при изменении высоты подъема груза от 0 до примерно 130 дюймов. При высоте подъема груза от примерно 130 дюймов до примерно 250 дюймов максимальная скорость движения составляет примерно 3 миль/час. При изменении высоты подъема от примерно 250 дюймов до примерно 500 дюймов максимальная скорость уменьшается примерно на 1 миль/час на каждые 100 дюймов подъема груза.
На фигуре 5 приведен график 500 зависимости максимальной величины скорости движения транспортного средства от угла поворота по одному или нескольким вариантам. Как можно видеть на графике 500, максимально допустимая скорость транспортного средства равна 100% его максимальной скорости при изменении угла поворота от 0 до примерно 8 градусов. При изменении угла поворота от примерно 8 градусов до примерно 30 градусов максимально допустимая скорость снижается от примерно 100% до примерно 70%. При изменении угла поворота от примерно 30 градусов до примерно 90 градусов максимально допустимая скорость не меняется и равна примерно 70%.
Следует понимать, что предельные величины скорости транспортного средства 106, указанные на графиках 400, 500 фигур 4, 5, соответственно, являются всего лишь примерами. Могут использоваться и другие предельные величины параметров для транспортного средства 106, как указано ниже в Таблицах 1-4. Следует понимать, что модуль VCM 112 может обмениваться информацией с модулем NCM 114 для координации различных условий ручного и автоматического режимов управления транспортным средством 106, например, информацией о предельных величинах параметров управления. В Таблицах 1-4 приведены примеры данных, которые могут быть переданы из модуля VCM 112 в модуль NCM 114, в зависимости от конфигурации.
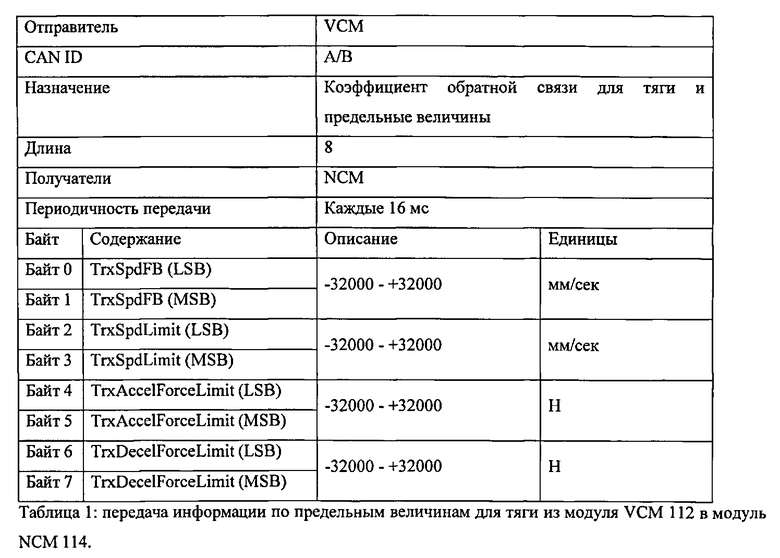
В Таблице 1 указаны данные, относящиеся к тяге, которые могут быть переданы из модуля VCM 112 в модуль NCM 114 по интерфейсу управления навигацией. В частности, сообщение, описанное в Таблице 1, содержит предельные величины для коэффициента обратной связи для тяги и других параметров тяги транспортного средства. В Таблице 1 указано, что данные передаются в 8-байтном сообщении, однако это всего лишь пример. Как указано в Таблице 1, байты 0 и 1 используются для коэффициента обратной связи для силы тяги. Байты 2 и 3 могут использоваться для указания предельной величины силы тяги. Байты 4 и 5 могут использоваться для указания предельной величины силы ускорения, создаваемого тягой. Байты 6 и 7 могут использоваться для указания предельной величины силы замедления, создаваемого тягой.
В частности, байты 0 и 1, относящиеся к коэффициенту обратной связи для силы тяги, могут передаваться из модуля VCM 112 в модуль NCM 114 для указания текущей скорости и/или состояния тяги транспортного средства 106. На транспортное средство 106 могут накладываться и другие ограничения (предельные величины параметров). Эти предельные величины могут включать предельную скорость, предельное ускорение и/или предельное замедление.
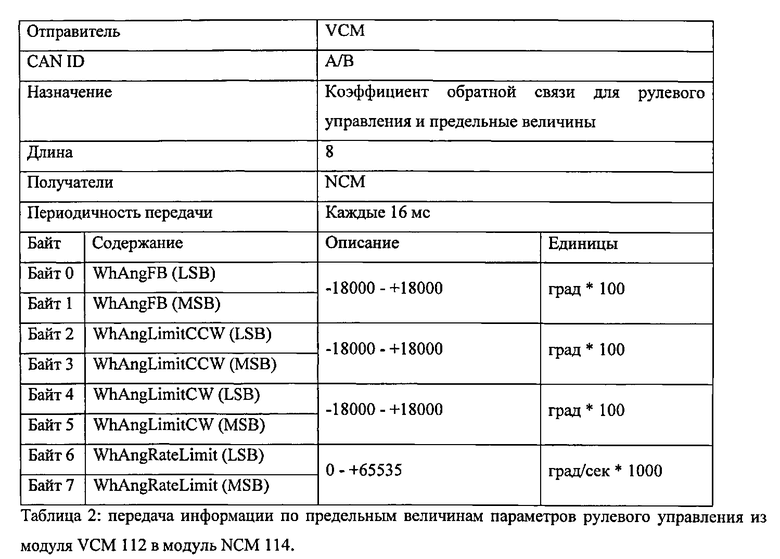
В Таблице 2 указаны данные, относящиеся к рулевому управлению, которые могут быть переданы из модуля VCM 112 в модуль NCM 114 по интерфейсу управления навигацией. В частности, байты 0 и 1 могут использоваться для обеспечения коэффициента обратной связи для угла поворота колеса транспортного средства. Байты 2 и 3 могут использоваться для указания максимальной величины угла поворота колеса по часовой стрелке. Байты 4 и 5 могут использоваться для указания максимальной величины угла поворота колеса против часовой стрелки. Байты 6 и 7 могут использоваться для указания предельной величины скорости поворота колеса.
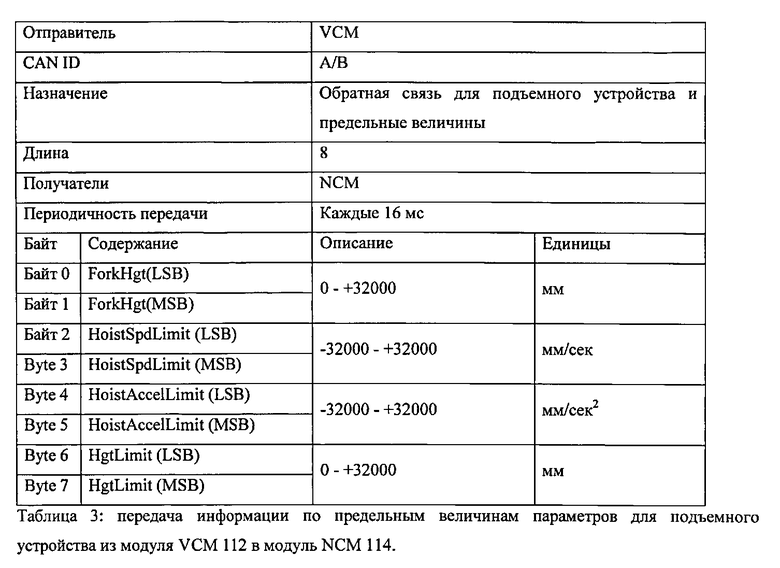
В Таблице 3 указаны данные, относящиеся к подъемному устройству, которые могут быть переданы из модуля VCM 112 в модуль NCM 114 по интерфейсу управления навигацией. В частности, данные в составе сообщения относятся к текущему состоянию вильчатого захвата. Соответственно, байты 0 и 1 могут использоваться для указания коэффициента обратной связи для высоты вильчатого захвата (текущей высоты вильчатого захвата) транспортного средства 106. Байты 2 и 3 могут использоваться для указания предельной величины скорости вильчатого захвата транспортного средства 106. Байты 4 и 5 могут использоваться для указания предельной величины ускорения вильчатого захвата. Байты 6 и 7 могут использоваться для указания предельной величины высота подъема вильчатого захвата. Кроме того, в модуль NCM 114 могут передаваться и другие данные, такие как вес груза, текущая скорость транспортного средства и т.п. Эти другие данные могут быть переданы в составе одного из сообщений, описанных в Таблицах 1-4 и/или в других сообщениях.

В Таблице 4 указаны данные, относящиеся к вспомогательному приспособлению транспортного средства, которые могут быть переданы из модуля VCM 112 в модуль NCM 114 по интерфейсу управления навигацией. В частности, байты 0 и 1 могут использоваться для указания положения вспомогательного приспособления на транспортном средстве 106. Байты 2 и 3 могут использоваться для указания предельного верхнего положения вспомогательного приспособления транспортного средства 106. Байты 4 и 5 могут использоваться для указания предельного нижнего положения вспомогательного приспособления. Байты 6 и 7 могут использоваться для указания предельной величины скорости вспомогательного приспособления.
Следует понимать, что хотя в Таблице 4 указаны параметры только для одного вспомогательного приспособления, аналогичные данные могут передаваться и для других вспомогательных приспособлений, установленных на транспортном средстве 106. Аналогично, в зависимости от функциональных возможностей вспомогательных приспособлений, информация в Таблице 4 может быть адаптирована для каждого вспомогательного приспособления, к которому относятся предельные величины параметров.
Сообщения Таблиц 1-4, передаваемые из модуля VCM 112 в модуль NCM 114, могут содержать одну или несколько предельных величин параметров, действительных для транспортного средства 106. В частности, при работе в ручном режиме управления транспортным средством 106 могут действовать предельные величины параметров, записанные в вышеупомянутом устройстве 336 хранения данных. Однако когда транспортное средство 106 работает в автоматическом режиме управления, навигационная система 102 и/или модуль NCM 114 могут не иметь информации о предельных величинах параметров, заданных для транспортного средства 106. Таким образом, когда навигационная система 102 и/или модуль NCM 114 передают в модуль VCM 112 команду, относящуюся к скорости (или к другому параметру), транспортное средство 106, возможно, не будет обеспечивать задаваемые характеристики работы в связи с заданными предельными величинами. В этой связи Таблицы 1-4 могут содержать информацию о предельных величинах параметров для транспортного средства 106. Информация о предельных величинах может содержать зависимости, определяющие изменения этих величин (см. фигуры 4 и 5), и/или это могут быть предельные значения, постоянные для текущего рабочего режима транспортного средства 106. В результате передачи этой информации навигационная система 102 и/или модуль NCM 114 будут "знать" эти предельные величины и будут осуществлять управление транспортным средством 106 таким образом, чтобы параметры его работы не выходили за заданные пределы.
На фигуре 6 приведена блок-схема алгоритма использования предельных величин параметров управления транспортным средством (ТС) по одному или нескольким вариантам, рассмотренным в настоящем описании. На стадии 630 определяется режим работы транспортного средства 106. В частности, модуль VCM 112, модуль NCM 114 и/или навигационная система 102 могут определять, работает ли транспортное средство 106 в ручном или в автоматическом режиме управления. Если на стадии 632 определяется, что транспортное средство 106 работает в ручном режиме управления, следует переход на стадию 630. Если же транспортное средство 106 работает в автоматическом режиме управления, то на стадии 634 модуль VCM 112 может передать информацию о предельных величинах параметров в навигационную систему 102 и/или в модуль NCM 114. На стадии 636 навигационная система 102 и/или модуль NCM 114 передают команды на транспортное средство 106 с учетом заданных предельных величин параметров.
На фигуре 7 приведена блок-схема другого алгоритма использования предельных величин параметров управления транспортным средством по одному или нескольким вариантам, рассмотренным в настоящем описании. На стадии 730 может быть получено назначенное задание, относящееся к перемещению груза в пункт назначения, определяемый трехмерными координатами. На стадии 732 может быть рассчитан маршрут для транспортного средства 106, обеспечивающий его перемещение в пункт назначения для выполнения назначенного задания. На стадии 734 может быть определена предельная величина параметра, которая зависит от текущего состояния транспортного средства 106. На стадии 736 формируется команда автоматического управления в соответствии с трехмерными координатами пункта назначения и с учетом предельной величины параметра. На стадии 738 команда автоматического управления передается на транспортное средство 106.
В настоящем описании были рассмотрены конкретные особенности и варианты осуществления изобретения, однако следует понимать, что возможны различные изменения и модификации этих вариантов без выхода за пределы объема заявленного изобретения. В настоящем описании были рассмотрены различные признаки заявленного изобретения, однако они необязательно должны использоваться все вместе. Поэтому все такие изменения и модификации, находящиеся в пределах объема заявленного изобретения, охватываются прилагаемой формулой.



Изобретение относится к системам и способам обеспечения предельных величин параметров управления транспортными средствами при использовании автоматического режима управления. Технический результат - более точное управление транспортным средством, работающим в автоматическом режиме управления. В одном из вариантов система содержит навигационную систему и транспортное средство, содержащее запоминающее устройство, в котором записана программа. Варианты системы обеспечивают: получение указания на автоматическое управление транспортным средством; прием маршрута от навигационной системы, обеспечивающего перемещение транспортного средства в пункт назначения для выполнения назначенного задания; и определение предельной величины параметра для транспортного средства, которая соответствует его текущему состоянию. В некоторых вариантах обеспечивается: передача предельной величины параметра из модуля (VCM) управления транспортным средством в модуль навигации (NCM); определение с использованием модуля NCM команды автоматического управления в соответствии с пунктом назначения и с учетом предельной величины для транспортного средства и передача команды автоматического управления в двигатель транспортного средства. 3 н. и 16 з.п. ф-лы, 7 ил., 4 табл.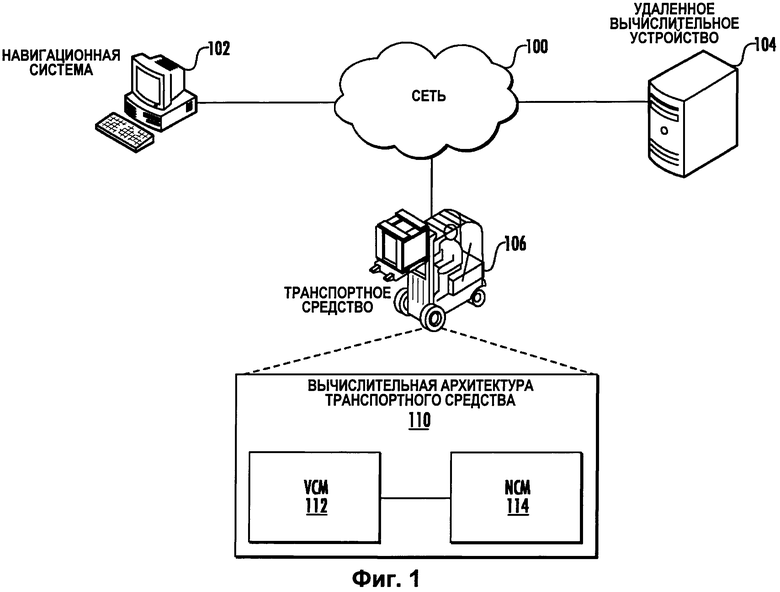
1. Система обеспечения предельных величин параметров управления транспортным средством, содержащая:
навигационную систему и
транспортное средство, содержащее запоминающее устройство, в котором записана программа, при выполнении которой устройством обработки информации транспортного средства обеспечивается выполнение транспортным средством по меньшей мере следующих стадий:
прием данных, необходимых для достижения транспортным средством пункта назначения с использованием режима автоматического управления;
определение предельной величины параметра управления транспортным средством, которая соответствует его текущему состоянию;
передача предельной величины параметра управления транспортным средством из модуля (VCM) управления транспортным средством в модуль (NCM) навигации, обеспечивающий автоматическое управление транспортным средством, при котором исключается передача модулем NCM в модуль VCM команды, которая приводит к выходу за предельную величину параметра управления транспортным средством.
2. Система по п. 1, в которой указание на автоматическое управление поступает от внешнего источника.
3. Система по п. 2, в которой внешним источником является по меньшей мере один из следующих источников: оператор навигационной системы, оператор транспортного средства и навигационная система.
4. Система по п. 1, в которой навигационная система определяет пункт назначения.
5. Система по п. 1, в которой текущим состоянием транспортного средства является по меньшей мере одно из следующих состояний: текущая высота подъема вильчатого захвата, текущая скорость транспортного средства, текущий угол поворота колеса и текущий вес груза.
6. Система по п. 1, в которой предельная величина параметра управления транспортным средством включает по меньшей мере одну из следующих предельных величин: предельную величину скорости, максимальный угол поворота колеса, предельную величину ускорения и предельную величину замедления.
7. Система по п. 6, в которой текущее состояние транспортного средства, определяющее предельную величину параметра управления транспортным средством, включает текущую высоту подъема вильчатого захвата.
8. Система по п. 6, в которой текущее состояние транспортного средства, определяющее предельную величину параметра управления транспортным средством, включает текущий вес груза.
9. Система по п. 1, в которой:
модуль VCM обеспечивает выполнение команд ручного управления и
предельная величина параметра управления транспортным средством получена модулем NCM от модуля VCM.
10. Система по п. 1, в которой формирование команды автоматического управления включает:
определение состояния транспортного средства и
определение эффективного управления транспортным средством для перемещения по маршруту с учетом его состояния и без выхода за предельную величину параметра управления транспортным средством.
11. Система по п. 10, в которой текущим состоянием транспортного средства является по меньшей мере одно из следующих состояний: текущий вес груза, текущая скорость транспортного средства, текущий угол поворота колеса и текущая высота подъема вильчатого захвата.
12. Система по п. 1, в которой в ответ на принятую модулем NCM команду автоматического управления модуль NCM передает в навигационную систему предельную величину параметра управления транспортным средством.
13. Система по п. 1, в которой модуль VCM передает в модуль NCM по меньшей мере одну из следующих величин параметров управления транспортным средством: коэффициент обратной связи для силы тяги, предельную величину силы тяги, предельную величину силы ускорения, создаваемой тягой, предельную величину силы замедления, создаваемой тягой, коэффициент обратной связи для угла поворота колеса, максимальный угол поворота колеса по часовой стрелке, максимальный угол поворота колеса против часовой стрелки, предельную скорость вращения колеса, коэффициент обратной связи для высоты подъема вильчатого захвата, предельную величину скорости подъемного устройства, предельную величину ускорения подъемного устройства, предельную величину высоты подъема вильчатого захвата, положение вспомогательного приспособления, максимальную предельную величину для вспомогательного приспособления, минимальную предельную величину для вспомогательного приспособления и предельную величину скорости вспомогательного приспособления.
14. Система по п. 1, содержащая также управляющее вычислительное устройство для обработки назначенного задания, причем:
назначенное задание определяет местонахождение продукта, который необходимо переместить;
управляющее вычислительное устройство передает данные, относящиеся к местонахождению продукта, в навигационную систему и
навигационная система определяет, выполнит ли транспортное средство назначенное задание.
15. Система по п. 1, в которой пункт назначения определяется трехмерными координатами.
16. Система по п. 1, в которой навигационная система содержит сервер.
17. Способ обеспечения предельных величин параметров управления транспортным средством, включающий:
прием назначенного задания, относящегося к пункту назначения, определяемому трехмерными координатами;
определение данных, необходимых для достижения транспортным средством указанного пункта назначения;
определение предельной величины параметра управления транспортным средством, которая соответствует его текущему состоянию;
передачу предельной величины параметра управления транспортным средством в модуль навигации (NCM) для исключения передачи модулем навигации NCM команды, которая приводит к выходу за предельную величину параметра управления транспортным средством.
18. Транспортное средство, содержащее:
запоминающее устройство, в котором записана программа, при выполнении которой устройством обработки информации транспортного средства обеспечивается выполнение транспортным средством по меньшей мере следующих стадий:
прием данных, касающихся пункта назначения;
определение предельной величины параметра управления транспортным средством, которая соответствует его текущему состоянию;
передача предельной величины параметра управления транспортным средством в модуль навигации (NCM) для исключения передачи модулем навигации NCM команды, которая приводит к выходу за предельную величину параметра управления транспортным средством.
19. Транспортное средство по п. 18, навигация которого в пункт назначения включает обмен информацией модуля NCM с модулем управления транспортным средством (VCM) для передачи команды управления.
| Колосоуборка | 1923 |
|
SU2009A1 |
| US 5995001, 30.11.1999 | |||
| US 7344037 B1, 18.03.2008 | |||
| СПОСОБ И СИСТЕМА УСОВЕРШЕНСТВОВАННОГО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ОДНОЙ ИЛИ НЕСКОЛЬКИМИ ФУНКЦИЯМИ ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2344948C2 |

