ПЕРЕКРЕСТНЫЕ ССЫЛКИ НА РОДСТВЕННЫЕ ЗАЯВКИ
Настоящая заявка имеет отношение к заявке на патент США №12/491,339, которая называется «Виртуальная управляющая станция», которая была подана 25 июня 2009 года, и автором которой являются Эдварде и др.
ПРЕДПОСЫЛКИ К СОЗДАНИЮ ИЗОБРЕТЕНИЯ
1. Область техники:
Настоящее описание относится в целом к управляющей станции и в частности к способу и устройству для управляющей станции, предназначенной для использования с некоторой платформой. Более конкретно, настоящее описание относится к управляющей станции, предназначенной для использования с некоторой платформой с целью выполнения некоторой задачи.
2. Уровень техники:
Управляющие станции используются с разными платформами с целью управления системами и функциями этих платформ. Например, управляющие станции в платформах летательных аппаратов используются для управления датчиками, оружием, коммуникационными системами, функциями безопасности, навигационными системами, системами управления полетом и/или любыми другими системами и функциями летательного аппарата. Управляющие станции также используются в других подвижных платформах, таких как, например, без ограничения, надводные суда, подводные лодки, танки, космические корабли, космические станции и/или другие подвижные платформы. Кроме того, управляющие станции также используются в неподвижных платформах, таких как, например, наземные станции и/или другие неподвижные платформы. Помимо этого, управляющие станции могут быть использованы в разных военных, коммерческих и/или космических областях.
В настоящее время управляющие станции являются большими и тяжелыми. Например, некоторые управляющие станции имеют массу 200 фунтов (90,7 кг). Существующие в настоящее время управляющие станции занимают пространство с площадью основания приблизительно 9 кв. футов (0,8 кв. м.) и высотой 5 футов (1,5 м).
Существующие управляющие станции имеют ограниченные дисплейные площади. Эти станции имеют дисплейные системы, расположенные внутри платформ и/или установленные на структуры, связанные с платформами. Такая компоновка ограничивает количество дисплейных систем, которые можно наблюдать одновременно. Кроме того, эта компоновка ограничивает размер дисплейных систем. Установка дисплейных систем на структуры, связанные с платформой, еще более уменьшает площадь пола в платформе. Ограниченное количество дисплейных систем, устанавливаемых на структуры платформы, также ограничивает количество одновременно доступных пользовательских функций, которыми может управлять оператор на управляющей станции.
Кроме того, существующие управляющие станции могут ограничивать подвижность оператора внутри управляющей станции. Это может приводить к утомлению оператора при выполнении длительных задач. Например, каждая управляющая станция должна иметь устройства ввода, расположенные таким образом, чтобы оператор был способен выполнять требуемые функции в положении сидя. Подвижность оператора может также быть ограничена, если он вынужден выполнять функции на управляющей станции в положении сидя с использованием приспособлений, ограничивающих его перемещение.
Используемые в настоящее время управляющие станции могут ограничивать взаимодействие операторов. Совместное выполнение задач и принятие решений с помощью существующих управляющих станций требует того, чтобы операторы были расположены рядом друг с другом, так чтобы они могли следить за показаниями дисплея. Такой тип компоновки не всегда возможен из-за ограничений, связанных с правилами безопасности этой платформы. Эти ограничения, связанные с правилами безопасности платформы, могут быть основаны на многих факторах, таких как турбулентность, маневры платформы и/или другие факторы.
Взаимодействие операторов также может быть ограничено недостатком пространства. Недостаток пространства может быть обусловлен размером существующих управляющих станций. Масса тоже может быть ограничивающим фактором для количества управляющих станций, которые могут быть помещены в определенное место. Например, в случае с летательным аппаратом, любая дополнительная масса может ухудшить рабочие характеристики или дальность полета этого летательного аппарата.
Таким образом, было бы выгодно иметь способ и устройство, в которых учтена по меньшей мере одна из описанных выше проблем, а по возможности и другие проблемы.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
В одном пояснительном варианте реализации устройство содержит дисплейную систему; систему захвата движения; пользовательские устройства ввода; кресло, связанное с пользовательскими устройствами ввода; и процессор. Дисплейная система выполнена с возможностью ее надевания на голову оператора и для предоставления этому оператору дисплея. Система захвата движения выполнена с возможностью отслеживания перемещения головы. Процессор сообщается с дисплейной системой, системой захвата движения и пользовательскими устройствами ввода. Процессор выполнен с возможностью исполнения программного кода с целью формирования дисплея и настройки дисплея, показываемого оператору, в ответ на обнаружение перемещения головы этого оператора.
Еще один пояснительный вариант реализации представляет собой способ для выполнения некоторой задачи. Информация для задачи принимается на управляющие станции. Управляющая станция содержит дисплейную систему; систему захвата движения; пользовательские устройства ввода; кресло, связанное с пользовательскими устройствами ввода; и процессор. Дисплейная система выполнена с возможностью ее надевания на голову оператора и для предоставления этому оператору дисплея. Система захвата движения выполнена с возможностью отслеживания перемещения головы. Процессор выполнен с возможностью исполнения программного кода с целью формирования дисплея и настройки дисплея, показываемого оператору, в ответ на обнаружение перемещения головы этого оператора и в ответ на управляющие входные сигналы от разных устройств ввода. Задача выполняется с использованием информации и управляющей станции.
Признаки, функции и преимущества настоящего изобретения могут быть осуществлены по отдельности в одних вариантах реализации и могут сочетаться в других вариантах реализации. Более подробное описание этих признаков, функций и преимуществ приведено ниже со ссылками на чертежи.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Признаки новизны настоящего изобретения сформулированы в прилагаемой формуле. Пояснительные варианты реализации, их дополнительные задачи и преимущества будут наилучшим образом поняты из нижеследующего подробного описания пояснительного варианта реализации настоящего изобретения, которое следует изучать совместно с прилагаемыми чертежами, среди которых:
Фиг. 1 - блок-схема, иллюстрирующая способ изготовления и обслуживания летательного аппарата согласно пояснительному варианту реализации;
Фиг. 2 - схема летательного аппарата, в котором может быть воплощен пояснительный вариант реализации настоящего изобретения;
Фиг. 3 - блок-схема управляющей среды согласно пояснительному варианту реализации;
Фиг. 4 - кресло для управляющей станции согласно пояснительному варианту реализации;
Фиг. 5 - выдвигающий механизм для приемника рабочей поверхности согласно пояснительному варианту реализации;
Фиг. 6 - головная дисплейная система согласно пояснительному варианту реализации;
Фиг. 7 - система захвата движения согласно пояснительному варианту реализации;
Фиг. 8 - система отслеживания кончика пальца согласно пояснительному варианту реализации;
Фиг. 9 - оператор, использующий управляющую станцию согласно пояснительному варианту реализации;
Фиг. 10 - оператор в кресле согласно пояснительному варианту реализации;
Фиг. 11 - оператор в кресле согласно пояснительному варианту реализации;
Фиг. 12 - управляющая станция согласно пояснительному варианту реализации;
Фиг. 13 - расположение сидений для управляющих станций согласно пояснительному варианту реализации;
Фиг. 14 - расположение сидений для управляющих станций согласно пояснительному варианту реализации;
Фиг. 15 - головная дисплейная система согласно пояснительному варианту реализации;
Фиг. 16 - головная дисплейная система согласно пояснительному варианту реализации;
Фиг. 17 - легкое кресло для управляющей станции согласно пояснительному варианту реализации;
Фиг. 18 - блок-схема алгоритма для выполнения задачи с использованием управляющей станции согласно пояснительному варианту реализации;
Фиг. 19 - блок-схема алгоритма, используемого системой захвата движения, согласно пояснительному варианту реализации; и
Фиг. 20 - блок-схема алгоритма для стабилизации дисплея согласно пояснительному варианту реализации.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНОГО ВАРИАНТА РЕАЛИЗАЦИИ
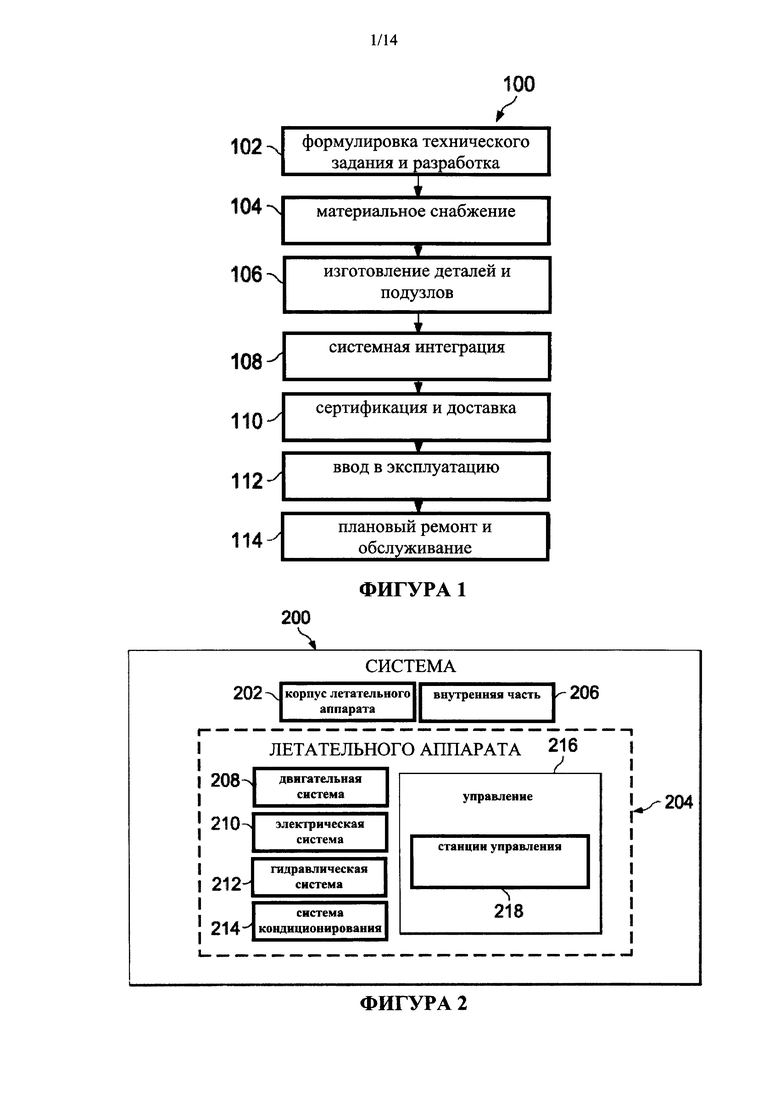
Рассмотрим более подробно чертежи. Варианты реализации настоящего изобретения могут быть описаны в контексте показанного на фиг. 1 способа 100 изготовления и обслуживания летательного аппарата и показанного на фиг. 2 летательного аппарата 200. Обратимся сначала к фиг. 1, на которой показана блок-схема, иллюстрирующая способ изготовления и обслуживания летательного аппарата, согласно пояснительному варианту реализации. Подготовка производства в способе 100 может включать в себя этап 102 формулировки технического задания и разработки аппарата 200, представленного на фиг. 2, и этап 104 материального снабжения.
Производственная стадия включает в себя этап 106 изготовления деталей и подузлов и этап 108 системной интеграции аппарата 200, представленного на фиг. 2. Затем аппарат 200, представленный на фиг.2, может пройти этап 110 сертификации и доставки, с тем чтобы на этапе 112 быть введенным в эксплуатацию. В процессе эксплуатации пользователем аппарат 200, представленный на фиг. 2, может проходить этап 114 планового ремонта и обслуживания, который может включать в себя модификацию, изменение компоновки, восстановление и другие операции.
Каждый из процессов способа 100 может быть осуществлен или проведен системным интегратором, третьей стороной и/или оператором. В этих примерах оператором может быть заказчик. В целях настоящего описания, понятие «системный интегратор» может включать в себя, без ограничения, любое количество производителей летательных аппаратов и субпоставщиков основных систем; понятие «третья сторона» может включать в себя, без ограничения, любое количество оптовых продавцов, субпоставщиков и поставщиков; а оператором может быть авиакомпания, лизинговая компания, военная организация, сервисная организация и т.д.
Обратимся к фиг. 2, где показана схема летательного аппарата, в котором может быть воплощен пояснительный вариант реализации. В этом примере аппарат 200 изготовлен способом 100 из фиг. 1 и может включать в себя корпус 202 с системами 204 и внутренней частью 206. Примером системы 204 является по меньшей мере одна из следующих систем: двигательная система 208, электрическая система 210, гидравлическая система 212, система 214 кондиционирования и управляющая система 216. В данных пояснительных примерах система 216 включает управляющие станции 218. Может быть включено какое угодно количество других систем. Несмотря на то, что показан пример с летательным аппаратом, другие варианты реализации могут быть применены в иных областях, таких как автомобильная промышленность.
Устройство и способы, воплощенные здесь, могут быть использованы во время любого по меньшей мере одного из этапов способа 100, представленного на фиг. 1. Например, детали или подузлы, изготавливаемые на этапе 106, представленном на фиг. 1, могут производиться или изготавливаться аналогично деталям или подузлам, изготавливаемым, когда аппарат 200 находится в эксплуатации на этапе 112, представленном на фиг. 1.
Кроме того, по меньшей мере один вариант реализации устройства, по меньшей мере один вариант реализации способа или их сочетание могут быть использованы во время производственных этапов, таких как, например, без ограничения, этап 106 и этап 108, представленные на фиг. 1, с существенным ускорением сборки или снижением стоимости аппарата 200. Аналогично, по меньшей мере один вариант реализации устройства, по меньшей мере один вариант реализации способа или их сочетание могут быть использованы во время ввода аппарата 200 в эксплуатацию на этапе 112 или во время его ремонта и обслуживания на этапе 114, представленном на фиг. 1. Например, управляющие станции согласно по меньшей мере одному пояснительному варианту реализации могут быть добавлены к аппарату 200 во время по меньшей мере одного из разных производственных этапов.
В разных пояснительных вариантах реализации принимаются во внимание и учитываются разные факторы. Например, в разных пояснительных вариантах реализации учтено и принято во внимание, что было бы желательно иметь в платформе управляющую станцию, которая легче существующих управляющих станций. Кроме того, управляющая станция, которая занимает меньше места, чем используемые в настоящее время управляющие станции, выгодна в платформах с ограниченным пространством. В разных пояснительных вариантах реализации также учтено и принято во внимание, что управляющая станция, которая обеспечивает повышенную функциональность, по сравнению с имеющимися в настоящее время управляющими станциями, тоже является желательной.
Кроме того, в разных пояснительных вариантах реализации принято во внимание и учтено, что существующие управляющие станции имеют дисплейные системы, которые могут потреблять больше энергии, чем желательно. Существующие управляющие станции также могут вырабатывать больше тепла и иметь особые требования к охлаждению.
Некоторые платформы могут иметь ограниченную выработку энергии. Например, летательные аппараты могут иметь ограниченное количество энергии, которая может быть использована для управляющих станций. Эти энергетические ограничения могут ограничивать количество управляющих станций, используемых с этими платформами. В разных пояснительных вариантах реализации учтено и принято во внимание, что могут быть желательными управляющие станции со сниженной потребностью в энергии и/или в охлаждении. Сниженная потребность в энергии может обеспечить возможность использования в разных платформах большего количества управляющих станций.
В разных пояснительных вариантах реализации также принято во внимание и учтено, что существующие управляющие станции обеспечивают ограниченные дисплейные возможности. Например, в летательном аппарате пространство ограничено. Ограниченность пространства может приводить к тому, что количество и/или размеры дисплеев, имеющихся на управляющей станции, будут меньше необходимого.
В разных пояснительных вариантах реализации также принято во внимание и учтено, что существующие управляющие станции могут не иметь желаемых средств безопасности. Например, существующие управляющие станции имеют приспособления, ограничивающие перемещение, но не имеют кислородных систем, которые являются частью этих управляющих станций. Желательно иметь управляющую станцию с кислородной системой, которая связана с этой станцией. В данных примерах кислородная система может быть связана со станцией за счет того, что она расположена в этой станции, прикреплена к ней, является ее частью или интегрирована с ней.
Таким образом, разные пояснительные варианты реализации предлагают устройство и способ для использования управляющей станции с целью выполнения некоторой задачи. Информация для задачи принимается на управляющей станции. Управляющая станция содержит дисплейную систему; систему захвата движения; кресло; устройства ввода; и процессор. Дисплейная система выполнена с возможностью ее надевания на голову оператора и для предоставления этому оператору дисплея. Система захвата движения выполнена с возможностью отслеживания перемещения головы оператора.
Входные данные от устройств ввода также могут быть использованы для настройки дисплея в дисплейной системе. Кресло связано с устройствами ввода. Процессор выполнен с возможностью исполнения программного кода с целью формирования дисплея. Процессор также выполнен с возможностью исполнения программного кода с целью настройки дисплея, показываемого оператору, в ответ на обнаружение перемещения головы оператора. Задача выполняется с использованием информации и управляющей станции. Настройка дисплея также может осуществляться в ответ на прием команд от устройств ввода.
В разных пояснительных вариантах реализации также принято во внимание и учтено, что существующие управляющие станции могут не быть выполнены с возможностью настройки на все желаемые компоновки для всех потенциальных операторов. В разных пояснительных вариантах реализации также учтено, что эта ситуация может способствовать утомлению оператора и снижению производительности его работы. Таким образом, желательно иметь управляющую станцию с возможностью настройки компоновок.
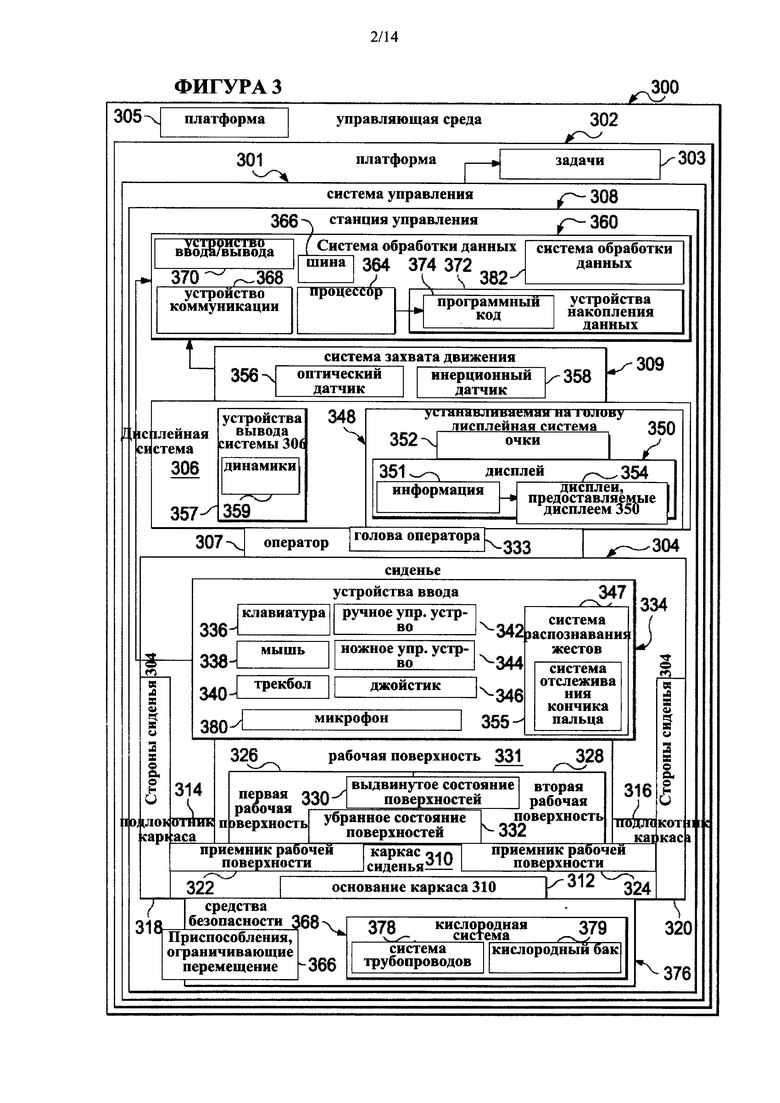
Теперь обратимся к фиг. 3, на которой показана управляющая среда согласно пояснительному варианту реализации. Управляющая среда 300 представляет собой пример управляющей среды, которая может быть воплощена в аппарате 200, представленном на фиг. 2. В данных пояснительных вариантах реализации среда 300 включает управляющую систему 301.
Система 301 расположена в платформе 302. Система 301 используется для выполнения задач 303. В тексте настоящей заявки некоторые названия подразумевают один объект или несколько объектов. Например, задача 303 может быть одна, либо задач 303 может быть несколько.
В данных пояснительных вариантах реализации система 301 может управлять работой платформы 302 в ходе выполнения задач 303. Платформа 302 может представлять собой, например, без ограничения, аппарат 200, представленный на фиг. 2. В других примерах среда 300 может принимать или передавать информацию. В качестве еще одного пояснительного примера, система 301 расположена в платформе 302 и управляет работой платформы 305. В этом примере платформа 302 может представлять собой наземную станцию, в то время как платформа 305 может представлять собой беспилотный летательный аппарат, искусственный спутник и/или другую подходящую платформу.
В этих пояснительных примерах система 301 включает в себя управляющую станцию 308. Оператор 307 использует станцию 308 для выполнения задач 303.
В этом пояснительном примере станция 308 включает в себя кресло 304, дисплейную систему 306, систему 309 захвата движения и систему 360 обработки данных. Кресло 304 в этих примерах представляет собой выполненное с возможностью настройки кресло. Иными словами, кресло 304 может быть настроено в нескольких измерениях. Кресло 304 может быть настроено для обеспечения улучшенной поддержки оператора 307. Кресло 304 включает в себя каркас 310. Каркас 310 включает в себя основание 312, подлокотник 314 и подлокотник 316. Подлокотник 314 может быть расположен на стороне 318 кресла 304, а подлокотник 316 может быть расположен на стороне 320 кресла 304.
В этом изображенном примере приемник 322 рабочей поверхности может быть связан со стороной 318 кресла 304, а приемник 324 рабочей поверхности может быть связан со стороной 320 кресла 304. Например, приемник 324 может быть связан со стороной 320 кресла 304 путем прикрепления, приклеивания, привинчивания и/или присоединения каким-либо иным способом. Кроме того, приемник 324 может быть связан со стороной 320 путем его изготовления в качестве части и/или выступа стороны 320 кресла 304. В данных примерах приемник 322 и приемник 324 прикреплены к каркасу 310 у подлокотников 314 и 316, соответственно.
Приемник 322 и приемник 324 с возможностью перемещения прикреплены к каркасу 310 кресла 304. В данных примерах приемник 322 и приемник 324 могут быть горизонтально и/или вертикально перемещены вдоль каркаса 310. Приемники 322 и 324 могут представлять собой, например, без ограничения, коробки, ящики, держатели и/или другие подходящие типы приемников.
Приемник 322 связан с первой рабочей поверхностью 326, а приемник 324 связан со второй рабочей поверхностью 328. Поверхность 326 и поверхность 328 выполнены с возможностью перемещения вдоль подлокотника 314 и подлокотника 316, соответственно. Таким образом, поверхность 326 и поверхность 328 можно настраивать вдоль подлокотника 314 и подлокотника 316. Кроме того, поверхность 326 и/или поверхность 328 можно настраивать путем перемещения приемника 322 и/или приемника 324, соответственно, вдоль каркаса 310.
В этих примерах поверхность 326 и поверхность 328 может быть выдвинута 330 и закрыта 332. В выдвинутом состоянии 330 поверхность 326 и поверхность 328 образуют рабочую поверхность 331. Поверхность 331 может быть настроена на несколько компоновок. В данном пояснительном примере эти компоновки могут быть получены путем перемещения приемника 322 и/или приемника 324 и/или путем перемещения поверхности 326 и/или поверхности 328. Поверхность 331 может быть настроена для вмещения оператора 307. Настройки для поверхности 331 могут обеспечивать возможность ее использования большим числом операторов.
В этих пояснительных примерах поверхность 331 связана с устройствами 334 ввода. Устройства 334 могут включать, например, без ограничения, клавиатуру 336, мышь 338, трекбол 340, ручное управляющее устройство 342, джойстик 346, систему 347 распознавания жестов и/или другие подходящие пользовательские устройства ввода.
В данных пояснительных вариантах реализации поверхность 326 и поверхность 328 могут быть выполнены с возможностью размещения на них клавиатуры 336, мыши 338 и/или джойстика 346. В некоторых пояснительных вариантах реализации первая часть клавиатуры 336 может быть связана с поверхностью 326, а вторая часть клавиатуры 336 может быть связана с поверхностью 328.
Разумеется, устройства 334 могут быть помещены и в другие места. Например, устройства 334 также могут включать в себя ножное управляющее устройство 344, которое может быть прикреплено к более низкой части кресла 304. Устройство 344 может представлять собой, например, ножную педаль, ножной переключатель и/или другое подходящее устройство ввода.
Система 306 представляет собой устройство, которое выполнено с возможностью надевания на голову 333 оператора 307 для предоставления этому оператору дисплея 350. Например, система 306 может представлять собой головную дисплейную систему 348. В данных примерах дисплей 350 показывает информацию 351 оператору 307. Например, дисплей 350 показывает несколько дисплеев 354.
Дисплеи 354 могут представлять собой, например, виртуальное представление нескольких физических дисплеев, окон и/или других подходящих объектов для предоставления информации 351 оператору 307. Дисплеи 354 дают оператору 307 возможность осуществлять коммуникацию внутри платформы 302 и/или платформы 305 и между этими платформами. Эта коммуникация может включать в себя обмен информацией 351. Информация может включать в себя данные, изображения, видео, команды, сообщения и/или другие подходящие формы информации 351. Информация 351 может также представлять собой, например, карту, информацию о состоянии, подвижную карту и/или другую подходящую форму информации 351.
В данных пояснительных примерах система 348 может включать в себя очки 352, которые могут давать оператору 307 возможность видеть дисплей 350. В данных изображенных примерах система 306 может также включать в себя устройства 357 вывода. Устройства 357 могут представлять собой, например, без ограничения, динамики 359. Динамики 359 могут предоставлять информацию в аудио-формате. Динамики 359 могут быть интегрированы в очки 352 системы 348 или быть связаны с ними иным образом. Оператор 307 может использовать устройства 334 для командования и управления описываемыми системами с дисплеем 350.
Оператор 307 использует устройства 334 для настройки дисплея 350. Например, оператор 307 может использовать устройства 334 с целью выбора из дисплеев 354 определенного набора дисплеев для наблюдения. Оператор 307 может также использовать устройства 334 для настройки размера, ориентации, расположения и/или других подходящих свойств дисплеев 354 и дисплея 350.
Кроме того, оператор 307 может использовать систему 347 для управления работой платформы 302 и/или платформы 305. В некоторых пояснительных вариантах реализации система 347 включает в себя систему 355 отслеживания кончика пальца. Система 355 позволяет использовать дисплей 350 в качестве сенсорного дисплея. Система 355 отслеживает перемещение и положение пальца оператора 307. Таким образом, система 355 может обеспечивать возможность имитации того, что дисплей 350 является сенсорным дисплеем.
В данных пояснительных примерах система 309 выполнена с возможностью отслеживания перемещения головы 333 оператора 307, когда на последнего надета система 348. В данном пояснительном примере система 309 включает в себя оптический датчик 356, инерционный датчик 358 и/или другие подходящие типы датчиков. Датчик 356 используется для отслеживания длины перемещения головы 333 оператора 307 и системы 348. Датчик 358 используется для отслеживания направления перемещения головы 333 оператора 307 и системы 348. Система 309 отправляет информацию о положении головы в систему обработки данных, такую как, например, система 360.
В данных пояснительных примерах система 360 связана со станцией 308. В данных пояснительных примерах система 360 может быть интегрирована с креслом 304 и/или системой 306. В других пояснительных примерах система 360 может быть расположена на расстоянии от станции 308. Система 360 включает в себя процессор 364, шину 366, устройство 368 коммуникации, устройство 370 ввода/вывода и устройства 372 накопления данных. Устройства 372 могут быть представлены по меньшей мере одним из следующих устройств: оперативное запоминающее устройство, постоянное запоминающее устройство, жесткий диск, твердотельный дисковый накопитель, накопитель на оптических дисках, флэш-память и/или другое устройство накопления данных.
В тексте настоящей заявки фраза «по меньшей мере один из», когда она используется с перечнем некоторых объектов, означает, что могут быть использованы разные сочетания по меньшей мере одного из перечисленных объектов, а каждый объект из перечня может быть необходим в единственном экземпляре. Например, «по меньшей мере один из таких объектов, как объект А, объект В и объект С» может включать, например, без ограничения, объект А или объект А и объект В. Этот пример также может включать объект А, объект В и объект С либо объект В и объект С. В других примерах «по меньшей мере один из» может представлять собой, например, без ограничения, два объекта А, один объект В и десять объектов С; четыре объекта В и семь объектов С; и другие возможные сочетания.
Программный код 374 хранится на по меньшей мере одном из устройств 372. Код 374 находится в функциональной форме. Процессор 364 выполнен с возможностью исполнения кода 374.
Код 374 может использоваться для формирования и предоставления дисплея 350 и дисплеев 354 внутри дисплея 350. Код 374 может также использоваться для настройки дисплея 350. Эти настройки могут выполняться в ответ на перемещение головы 333 оператора 307 и/или в ответ на входной сигнал от системы 309. Таким образом, головокружение и неудобство, которые могут возникать из-за перемещения дисплея 350 при перемещении головы 333, могут быть уменьшены и/или устранены. Дисплей 350 подвергается стабилизации во время перемещения головы 333 оператора 307 с целью уменьшения и/или устранения нежелательных уровней дискомфорта оператора 307. Кроме того, код 374 может исполняться с целью настройки дисплея 350 в ответ на ввод данных пользователем через устройства 334.
В этих пояснительных примерах станция 308 также включает в себя средства 376 безопасности, связанные с креслом 304. Средства 376 могут включать в себя, например, без ограничения, по меньшей мере один из следующих объектов: приспособления 366, ограничивающие перемещение, кислородная система 368 и другие подходящие средства безопасности. Приспособления 366 могут иметь форму, например, ремня безопасности, привязного ремня и/или другой подходящей системы, ограничивающей перемещение.
В данных примерах система 368 включает в себя трубопроводную систему 378. Система 378 выполнена с возможностью ее присоединения к источнику кислорода, такому как, например, кислородный бак 379. Система 378 представляет собой совокупность трубопроводов, которая способна обеспечить поток кислорода от бака 379 к оператору 307. В данных пояснительных примерах бак 379 связан с креслом 304. Иными словами, бак 379 может быть прикреплен к креслу 304, расположен внутри кресла 304, составлять часть кресла 304 или быть связан с креслом 304 иным подходящим способом.
Показанное на фиг.3 изображение среды 300 не имеет целью внести физические или архитектурные ограничения в способ воплощения разных пояснительных вариантов реализации. В дополнение к показанным компонентам и/или вместо показанных компонентов могут быть использованы другие компоненты. Некоторые компоненты в некоторых пояснительных вариантах реализации могут быть не нужны. Кроме того, блоки в этой схеме иллюстрируют функциональные компоненты. По меньшей мере один из этих блоков может быть объединен или разделен на разные блоки при воплощении в разных пояснительных вариантах реализации.
Например, среда 300, помимо станции 308, может включать дополнительные управляющие станции. В некоторых пояснительных вариантах реализации процессор 364 может быть расположен по меньшей мере в одном из следующих объектов: система 360, связанная с креслом 304; система 306; дистанционная система обработки данных и/или другое подходящее место. В данных примерах другие компоненты системы 360 также могут быть расположены внутри системы 306, могут быть не нужны или могут быть связаны с креслом 304.
В некоторых пояснительных вариантах реализации система 309 может являться частью системы 348. В других пояснительных вариантах реализации устройства 334 могут включать в себя микрофон, такой как микрофон 380. В некоторых примерах микрофон 380 может быть интегрирован с системой 348. Микрофон 380 может отправлять входной сигнал процессору 364. Оператор 307 может использовать микрофон 380 для настройки дисплея 350 и/или информации 351, представленной на дисплее 350. Оператор 307 также может использовать микрофон 380 для отправки команд дисплею 350. Входной сигнал от микрофона 380 может распознаваться системой 382 распознавания речи. В данных примерах система 382 может являться частью системы 360.
В других пояснительных вариантах реализации система 368 может иметь систему 378, выполненную с возможностью присоединения к источнику кислорода, который отличен от бака 379 или используется в дополнение к баку 379. Например, система 378 может быть выполнена с возможностью присоединения к источнику кислорода в платформе 302. В других пояснительных вариантах реализации поверхность 331 может быть сформирована одной рабочей поверхностью, которая может выдвигаться от одной стороны кресла 304.
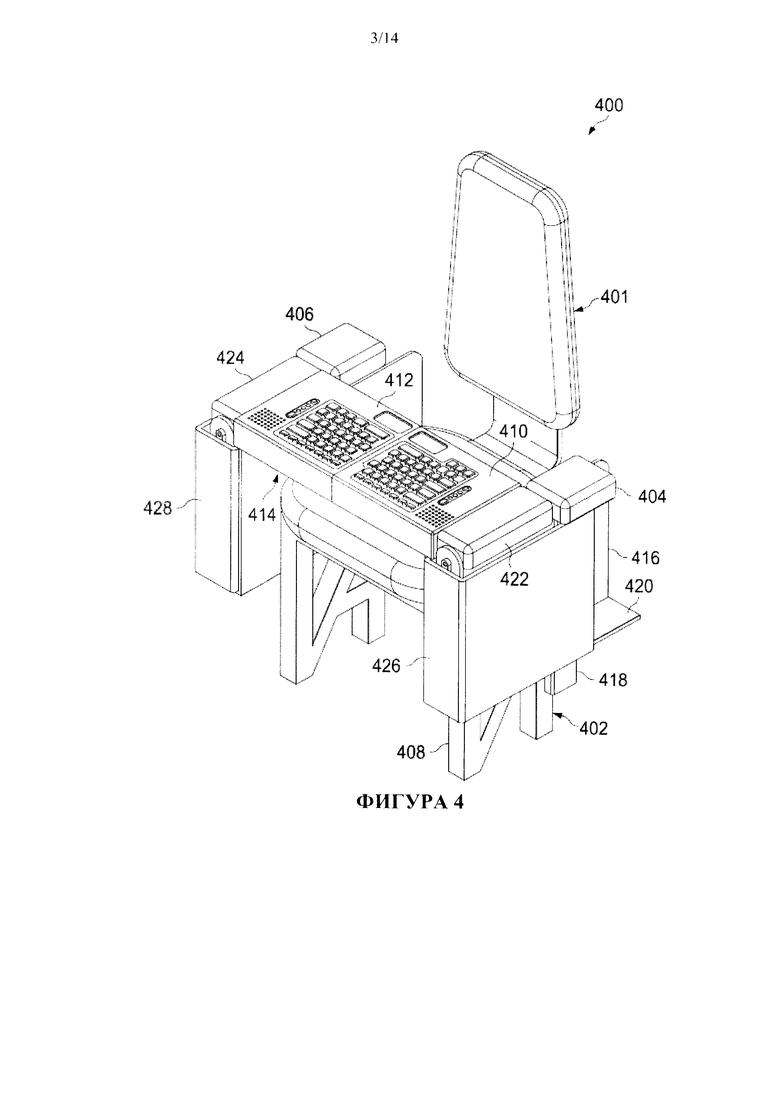
Обратимся к фиг. 4, на которой показано кресло для управляющей станции согласно пояснительному варианту реализации. В этом пояснительном примере управляющая станция 400 с креслом 401 представляет собой один пример выполнения станции 308, представленной на фиг. 3.
В этом пояснительном примере кресло 401 имеет каркас 402 с подлокотником 404, подлокотником 406 и основанием 408. Кресло 401 также имеет рабочую поверхность 410, связанную с подлокотником 404, и рабочую поверхность 412, связанную с подлокотником 406. В этих пояснительных примерах поверхность 410 прикреплена к подлокотнику 404, а поверхность 412 прикреплена к подлокотнику 406. В других примерах поверхность 410 и поверхность 412 могут быть выполнены как части подлокотника 404 и подлокотника 406.
В этих пояснительных примерах поверхность 410 и поверхность 412 с возможностью перемещения прикреплены к подлокотнику 404 и подлокотнику 406, соответственно. Кроме того, поверхность 410 и поверхность 412 выполнены с возможностью перемещения между выдвинутым и закрытым состояниями. В выдвинутом состоянии поверхность 410 и поверхность 412 образуют рабочую поверхность 414.
Как показано на чертеже, кресло 401 имеет направляющую полку 416 и еще одну направляющую полку (не показанную на этом виде) на другой его стороне. Полка 416 может вертикально перемещаться вдоль каркаса 402. Вертикальное перемещение полки 416 обеспечивается приводом 418, прикрепленным к каркасу 402. Аналогичным образом, еще один привод (не показан на этом виде), прикрепленный к каркасу 402, может обеспечивать вертикальное перемещение другой направляющей полки кресла 401.
Кроме того, полка 416 и другая направляющая полка кресла 401 имеют горизонтальные направляющие, такие как горизонтальная направляющая 420 полки 416. Приемник 426 рабочей поверхности и приемник 428 рабочей поверхности выполнены с возможностью горизонтального перемещения вдоль направляющих 420 полки 416 и вдоль горизонтальных направляющих другой направляющей полки кресла 401, соответственно.
В этом пояснительном примере подлокотник 422 прикреплен к полке 416, и подлокотник 424 прикреплен к другой направляющей полке кресла 401. Эти подлокотники обеспечивают опору для оператора в качестве подлокотников. Кроме того, эти подлокотники обеспечивают опору для поверхности 410 и поверхности 412 в их выдвинутом состоянии.
Приемник 426 и приемник 428 могут иметь выдвигающие механизмы, способные выдвигать поверхность 410 и поверхность 412, соответственно. Поверхность 410 и поверхность 412 выдвигаются для образования поверхности 414.
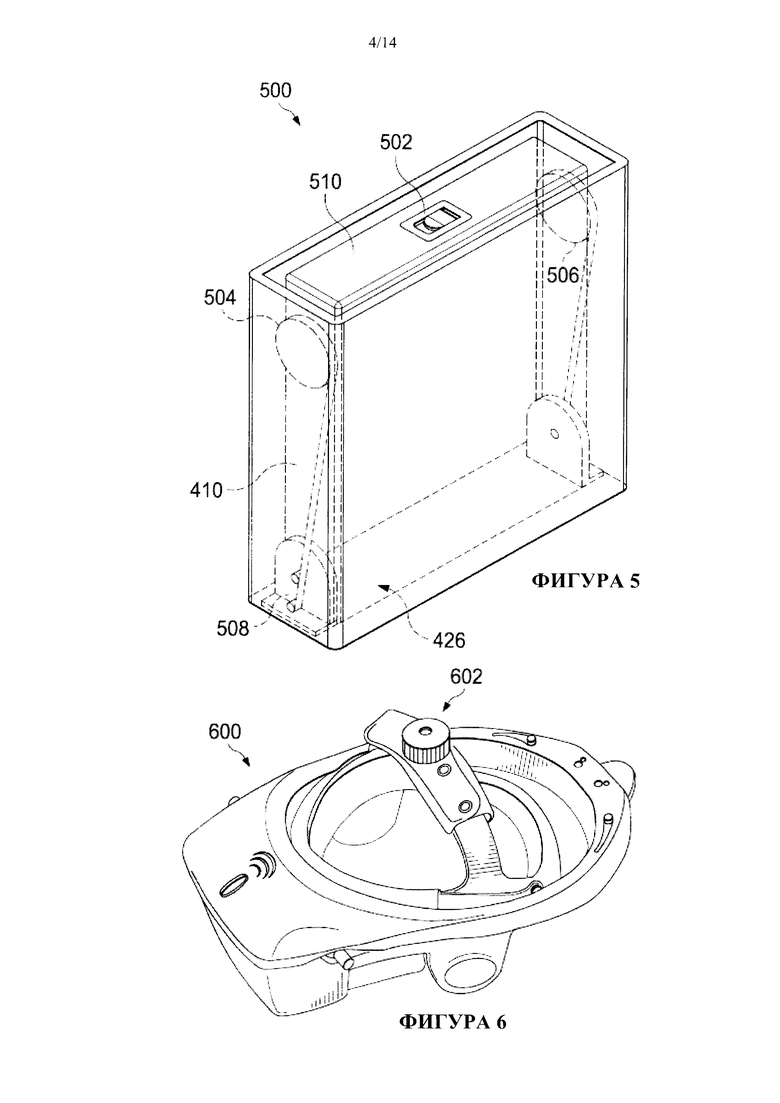
На фиг. 5 показан выдвигающий механизм для приемника рабочей поверхности согласно пояснительному варианту реализации. В этом пояснительном примере приемник 426 кресла 400, представленного на фиг. 4, показан в состоянии, в котором поверхность 410 закрыта.
Приемник 426 имеет выдвигающий механизм 500 с защелкой 502, пружиной 504 и пружиной 506. Когда защелка отпирается, пружина 504 и пружина 506 заставляют поверхность 410 перемещаться в выдвинутое состояние.
В этом пояснительном примере пружина 504 и пружина 506 действуют в качестве точек поворота для поверхности 410. Например, когда защелка 502 отпирается, поверхность 410 вращается вокруг пружины 504 и пружины 506. Иными словами, поверхность 410 вращается вокруг оси, проходящей через пружину 504 и пружину 506. Это вращение приводит к тому, что в выдвинутом состоянии конец 508 поверхности 410 находится по существу на таком же уровне, что и конец 510 поверхности 410. Аналогичным образом, поверхность 412, представленная на фиг. 4, может быть перемещена в выдвинутое состояние с использованием выдвигающего механизма для приемника 428, представленного на фиг. 4.
В других пояснительных примерах поверхность 410 в выдвинутом состоянии может быть механически и/или электрически развернута вокруг оси, проходящей через пружины 504 и 506, для ее перемещения из выдвинутого состояния в зактытое состояние.
В некоторых пояснительных примерах оператор в кресле 400 может передвигать приемник 426 вдоль направляющих 420 полки 416, представленной на фиг. 4, перед перемещением поверхности 410 между выдвинутым и закрытым состояниями. Например, передвижение приемника 426 вдоль направляющих 420 может осуществляться с целью предотвращения контакта между поверхностью 410 и ногами оператора во время поворота поверхности 410 вокруг пружины 504 и пружины 506.
На фиг. 6 показана головная дисплейная система согласно пояснительному варианту реализации. В этом пояснительном примере головная дисплейная система 600 представляет собой один пример выполнения системы 348, представленной на фиг. 3. Система 600 может быть использована для отображения виртуального дисплея, такого как, например, дисплей 350, представленный на фиг. 3. В некоторых примерах к концу 602 системы 600 может быть прикреплена система захвата движения, такая как система 309, представленная на фиг. 3.
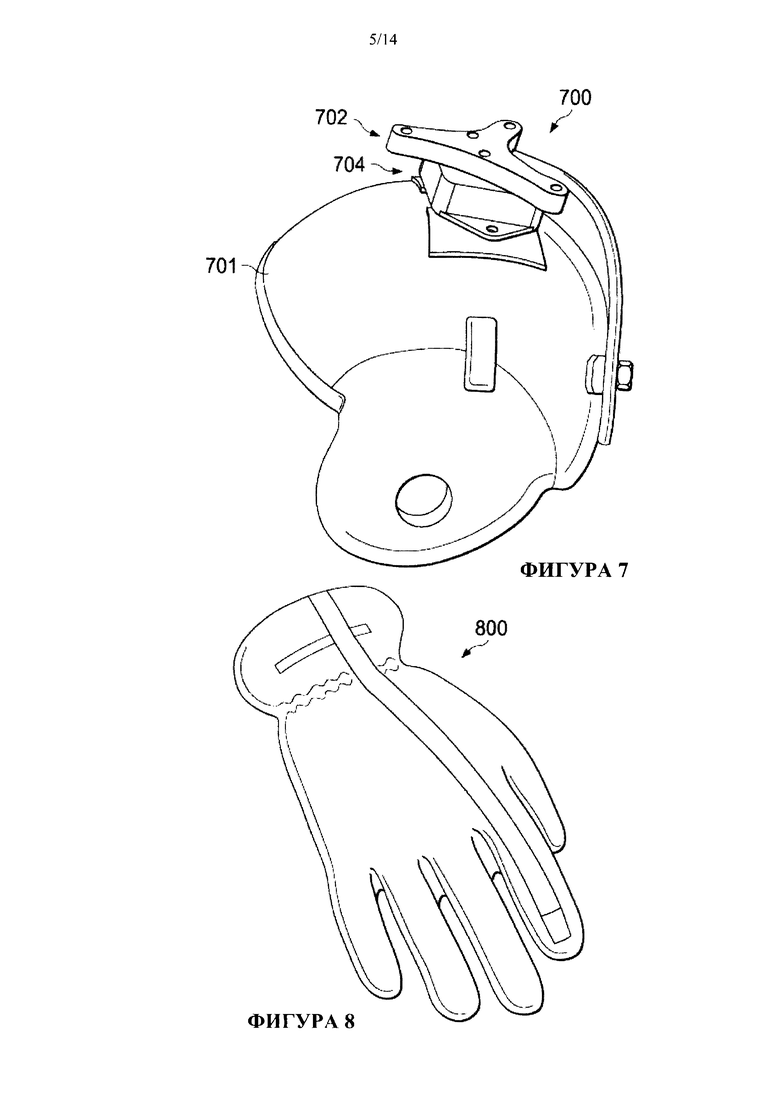
На фиг. 7 показана система захвата движения согласно пояснительному варианту реализации. В этом пояснительном примере система 700 захвата движения представляет собой один пример выполнения системы 309, представленной на фиг. 3. В этом примере система 700 прикреплена к шлему 701. В других примерах система 700 может быть прикреплена к головной гарнитуре, такой как система 600, представленная на фиг. 6. Говоря точнее, система 700 может быть прикреплена к концу 602 системы 600, представленной на фиг. 6.
Как показано, система 700 имеет оптический датчик 702 и инерционный датчик 704. Датчик 702 и датчик 704 могут быть использованы вместе для отслеживания положения головы оператора шлема 701. В некоторых пояснительных вариантах реализации отслеживание направления перемещения головы может быть не нужно. В этих случаях датчик 704 может быть не нужен, и датчика 702 может быть достаточно.
Теперь обратимся к фиг. 8, на которой показана система отслеживания кончика пальца согласно пояснительному варианту реализации. В этом пояснительном примере система 800 отслеживания кончика пальца представляет собой один пример выполнения системы 359 отслеживания кончика пальца из фиг. 3. В качестве одного примера, система 800 может быть связана с креслом управляющей станции путем ее соединения с системой обработки данных, такой как, например, система 360, представленная на фиг. 3. В других примерах система 800 может быть связана с другими компонентами станции 308, представленной на фиг. 3.
Система 800 может быть использована для отслеживания перемещения и положения пальца оператора. Например, головная дисплейная система, такая как система 600, может показывать виртуальный дисплей, выполненный с возможностью имитации сенсорного экрана. Система 800 может обеспечивать возможность имитации того, что указанный виртуальный дисплей является сенсорным экраном.
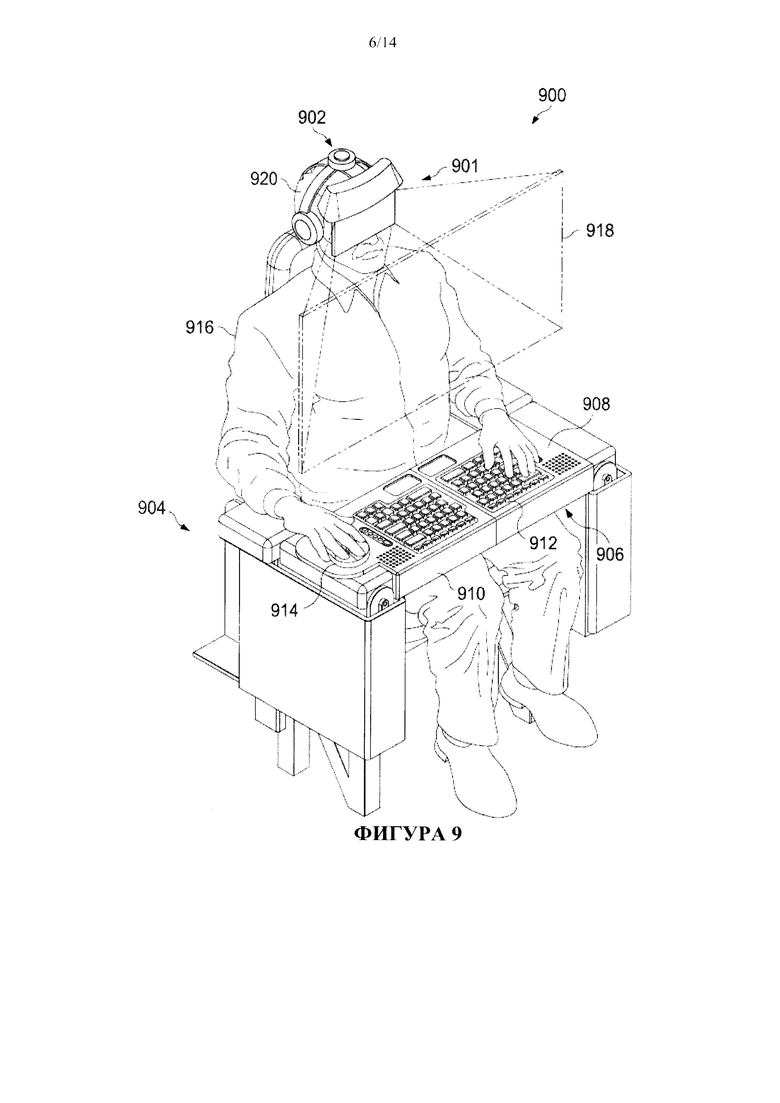
Теперь обратимся к фиг. 9, на которой изображен оператор, использующий управляющую станцию согласно пояснительному варианту реализации. В этом пояснительном примере управляющая станция 900 представляет собой один пример выполнения станции 308, представленной на фиг. 3. В этом пояснительном примере станция 900 включает в себя головную дисплейную систему 901; систему 902 захвата движения, прикрепленную к системе 901; и кресло 904.
Кресло 904 включает в себя рабочий стол 906, образованный рабочей поверхностью 908 и рабочей поверхностью 910 в выдвинутом состоянии. В этом примере стол 906 выполнен с возможностью размещения на нем клавиатуры 912 и мыши 914.
Оператор 916 использует систему 901 для наблюдения дисплея 918. Дисплей 918 представлен не физически. Изображенный дисплей 918 представляет собой пример дисплея, который демонстрируется оператору 916 с помощью системы 901. Иными словами, дисплей 918 представляет собой виртуальное представление физического дисплейного окна.
В этом пояснительном примере дисплей 918 подвергается стабилизации в трех измерениях с использованием системы 902. Иными словами, оператор 916 может двигаться, но дисплей 918 остается неподвижным по отношению к станции 900. Система 902 отслеживает перемещение головы 920 оператора 916 для стабилизации дисплея 918. Дисплей 918 может наблюдаться оператором 916 только через систему 901.
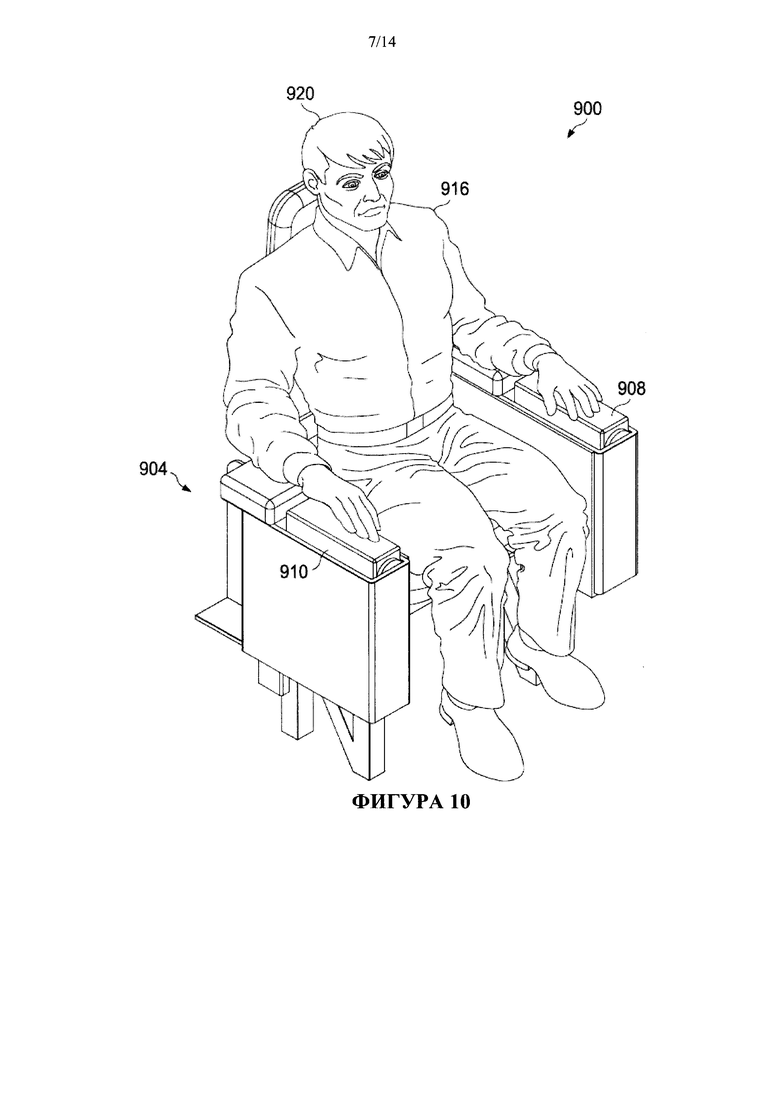
На фиг. 10 показан оператор 916 в кресле 904, представленном на фиг. 9, согласно пояснительному варианту реализации. В этом пояснительном примере оператор 916 находится на кресло 904, поверхность 908 и поверхность 910 которого закрыты.
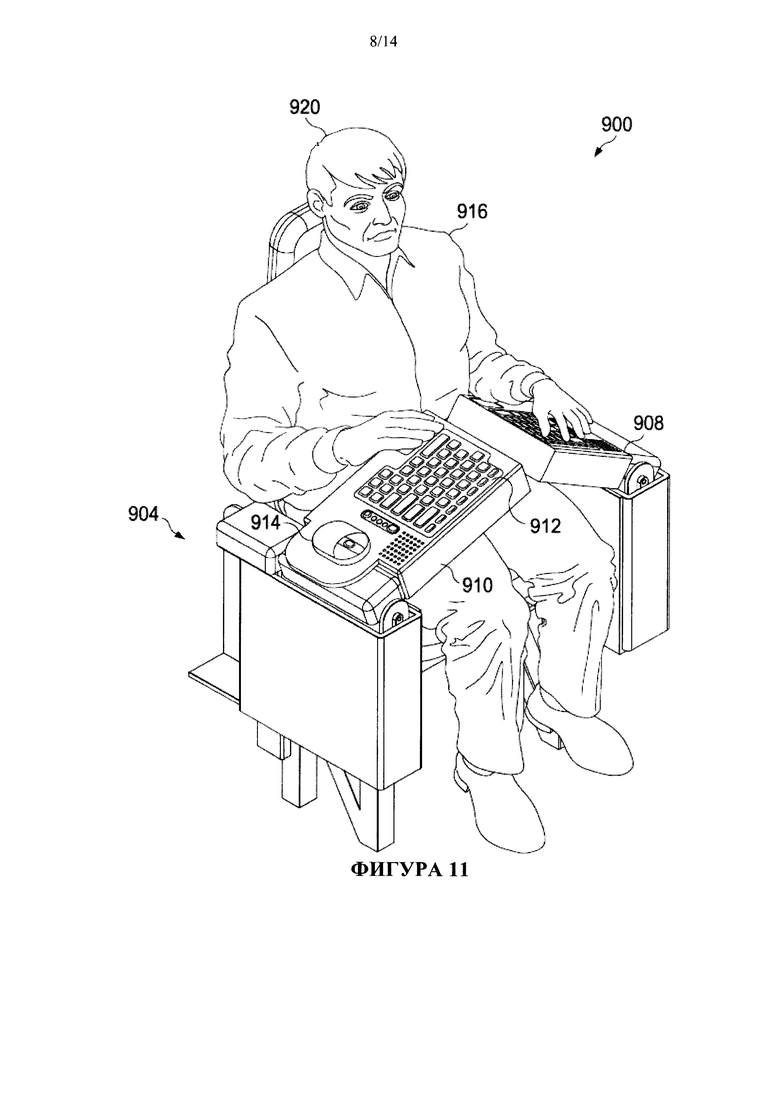
На фиг. 11 показан оператор 916 на кресло 904, представленном на фиг. 9, согласно пояснительному варианту реализации. В этом пояснительном примере показан еще один вид оператора 916 на кресло 904, поверхность 908 и поверхность 910 которого частично выдвинуты.
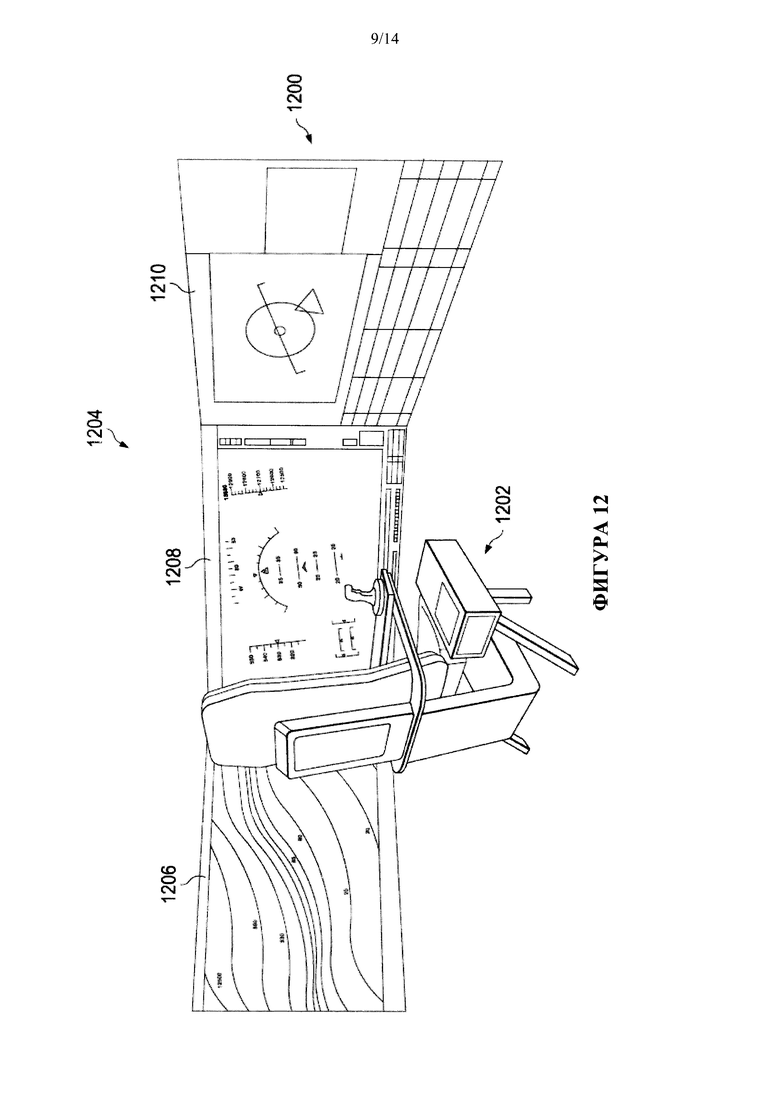
На фиг. 12 показана управляющая станция согласно пояснительному варианту реализации. В этом пояснительном примере управляющая станция 1200 представляет собой один пример выполнения станции 308, представленной на фиг. 3. Кресло 1202 представляет собой один пример выполнения кресла 304, представленного на фиг. 3.
В этом пояснительном примере виртуальный дисплей 1204 представляет собой один пример выполнения дисплея 350, представленного на фиг. 3. Дисплей 1204 в данном пояснительном примере включает в себя окно 1206, окно 1208 и окно 1210. Эти окна показаны в той компоновке, в которой они демонстрируются оператору с помощью головной дисплейной системы, такой как система 348, представленная на фиг.3, когда этот оператор находится в кресле 1202. Окна 1206, 1208 и 1210 представляют собой виртуальные представления физических окон.
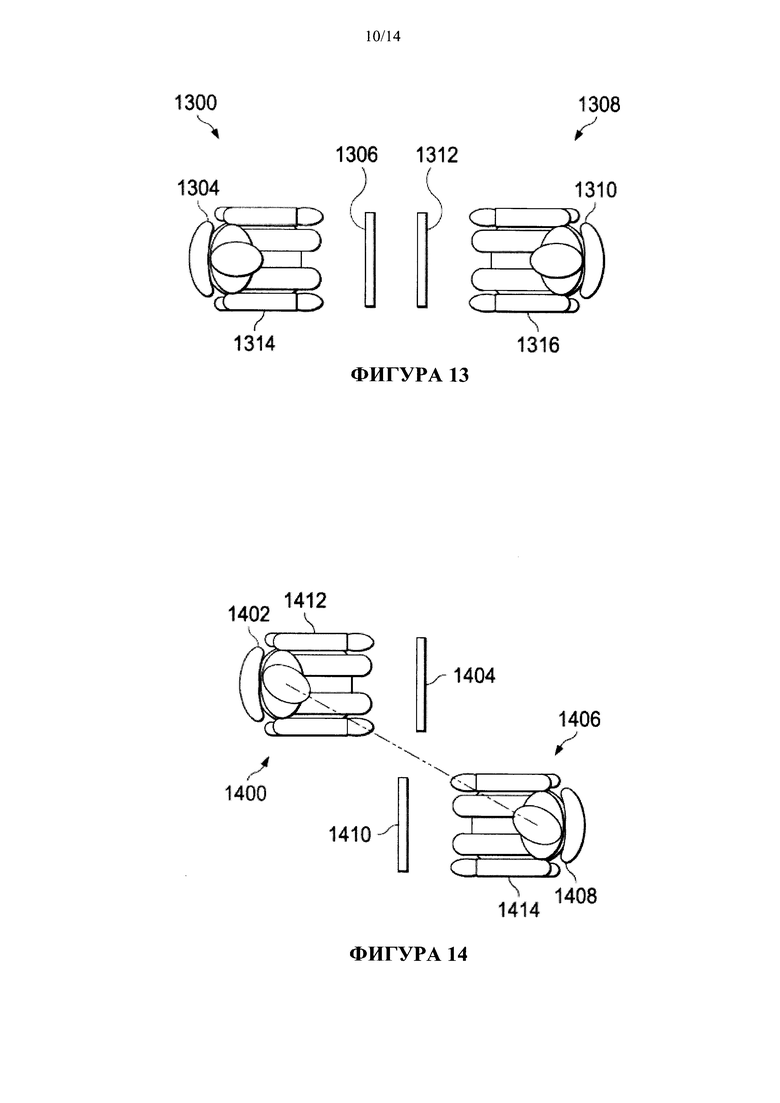
Теперь обратимся к фиг. 13, на которой показано расположение сидений для управляющих станций согласно пояснительному варианту реализации. В этом пояснительном примере управляющая станция 1300 включает кресло 1304 и дисплей 1306, а управляющая станция 1308 включает кресло 1310 и дисплей 1312.
В этом примере кресло 1304 и кресло 1310 расположены непосредственно одно напротив другого. При таком расположении оператор 1314 и оператор 1316 могут не иметь возможности видеть друг друга во время наблюдения дисплея 1306 и дисплея 1312, соответственно. Для того чтобы дать операторам 1314 и 1316 возможность видеть друг друга, можно с помощью управляющих средств изменить расположение окон внутри дисплеев 1306 и 1312. Окна внутри дисплеев 1306 и 1312 можно перекомпоновать таким образом, чтобы все они сместились к краю поля зрения операторов.
Теперь обратимся к фиг. 14, на которой показано расположение сидений для управляющих станций согласно пояснительному варианту реализации. В этом пояснительном примере показана еще одна компоновка для управляющей станции. В этом пояснительном примере управляющая станция 1400 включает в себя кресло 1402 и дисплей 1404, а управляющая станция 1406 включает в себя кресло 1408 и дисплей 1410. В этом примере кресло 1402 и кресло 1408 расположены со смещением. Такая компоновка дает оператору 1412 и оператору 1414 возможность увидеть друг друга путем поворота головы.
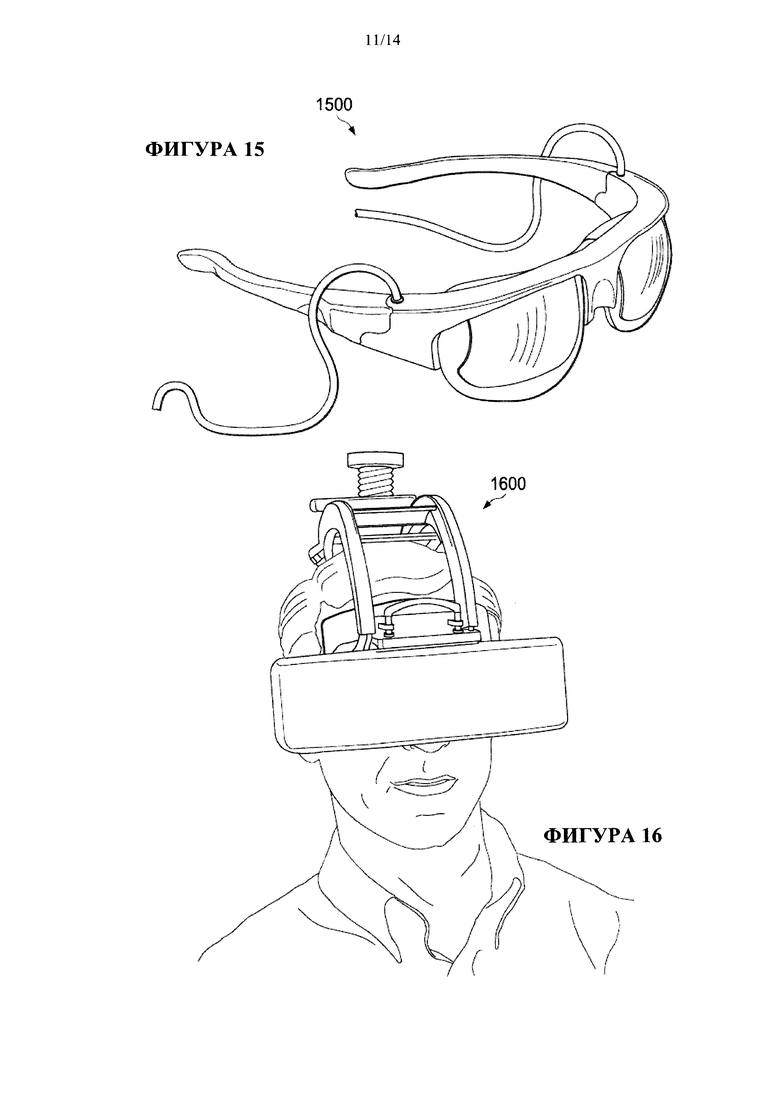
Теперь обратимся к фиг. 15, на которой показана головная дисплейная система согласно пояснительному варианту реализации. В этом примере головная дисплейная система 1500 представляет собой один пример выполнения системы 348, представленной на фиг. 3. Система 1500 представляет собой пример дисплейной системы LightVu, которая выпускается компанией Mirage Innovations, Ltd.
Теперь обратимся к фиг. 16, на которой показана головная дисплейная система согласно пояснительному варианту реализации. В этом примере головная дисплейная система 1600 представляет собой один пример выполнения системы 348, представленной на фиг. 3. Система 1600 представляет собой пример дисплейной системы piSight HMD, которая выпускается компанией Sensics, Inc.
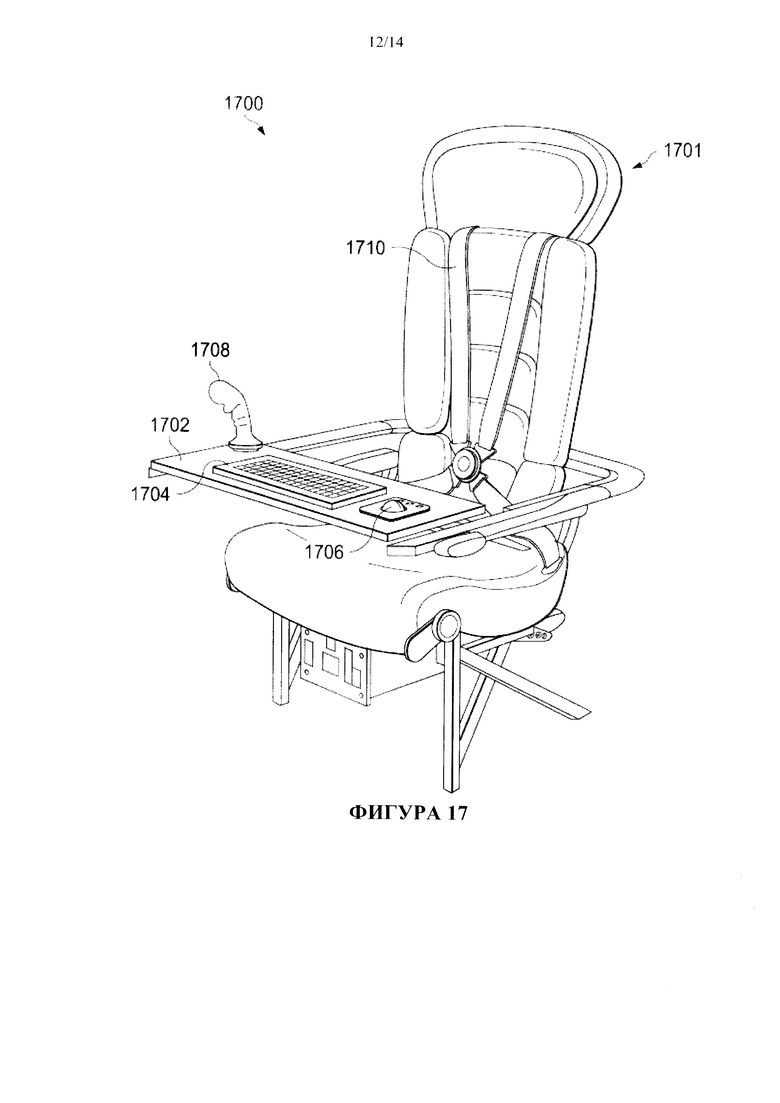
Теперь обратимся к фиг. 17, на которой показано кресло для управляющей станции согласно пояснительному варианту реализации. В этом пояснительном примере кресло 1701 для управляющей станции 1700 представляет собой один пример выполнения кресла 304 для станции 308, представленной на фиг. 3. Кресло 1701 включает в себя рабочую поверхность 1702, выполненную с возможностью размещения на ней клавиатуры 1704, мыши 1706 и джойстика 1708. Как показано в данном примере, кресло 1701 имеет приспособление 1710, ограничивающее перемещение.
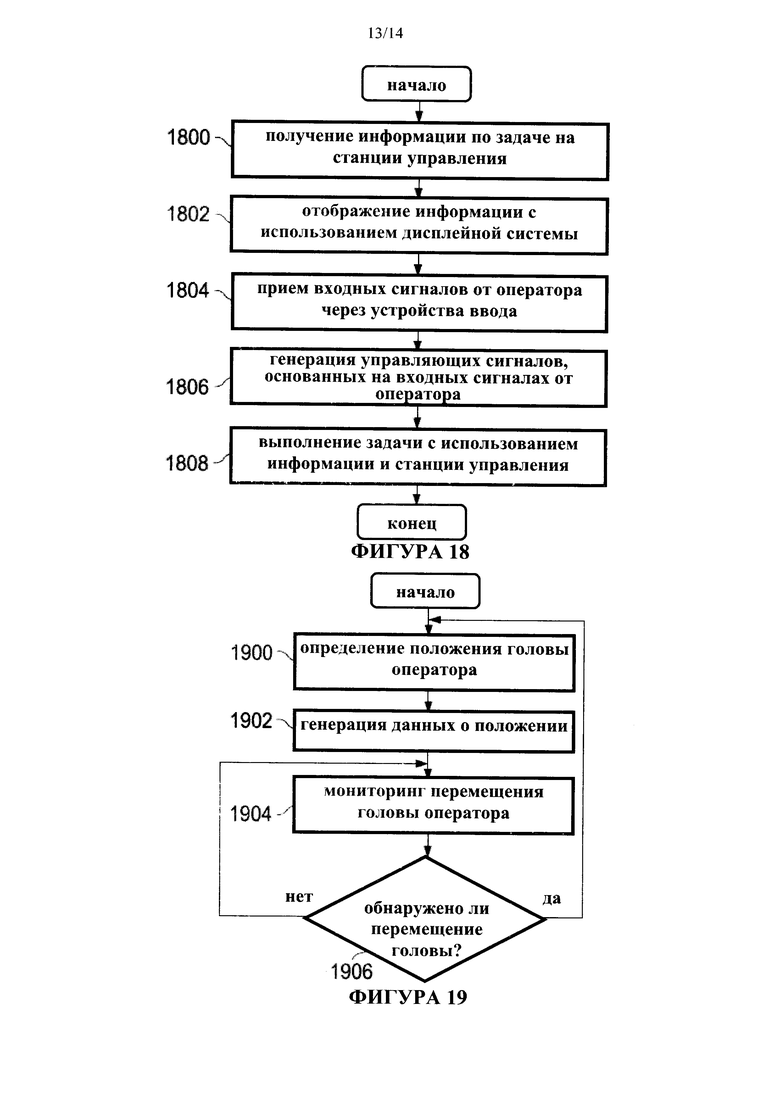
Теперь обратимся к фиг. 18, на которой показана блок-схема алгоритма для выполнения задачи с использованием управляющей станции согласно пояснительному варианту реализации. Алгоритм, показанный на фиг. 18, может быть воплощен с использованием управляющей станции, такой как, например, станция 308 в среде 300, представленной на фиг. 3.
Алгоритм начинается получением информации для задачи на управляющей станции (этап 1800). Управляющая станция содержит дисплейную систему, систему захвата движения, устройства ввода, кресло и процессор. Дисплейная система выполнена с возможностью ее надевания на голову оператора и для предоставления этому оператору дисплея. Система захвата движения выполнена с возможностью отслеживания перемещения головы оператора. Устройства ввода связаны с креслом. Процессор выполнен с возможностью исполнения программного кода с целью формирования дисплея и настройки дисплея в ответ на обнаружение команд от устройств ввода и/или в ответ на обнаружение перемещения головы оператора.
После этого алгоритм отображает информацию с использованием дисплейной системы (этап 1802). Алгоритм принимает входные сигналы от оператора через устройства ввода (этап 1804). Затем алгоритм генерирует управляющие сигналы, основанные на входных сигналах от оператора (этап 1806). Эти управляющие сигналы могут быть использованы для управления платформой, такой как летательный аппарат, подводная лодка, космический корабль, сухопутное транспортное средство, беспилотный летательный аппарат, наземная станция и/или другая подходящая платформа. Задача выполняется с использованием информации и управляющей станции (этап 1808) с последующим прерыванием алгоритма.
Теперь обратимся к фиг. 19, на которой показана блок-схема алгоритма, используемого системой захвата движения, согласно пояснительному варианту реализации. Алгоритм, показанный на фиг. 19, может быть воплощен системой захвата движения, такой как, например, система 309, представленная на фиг. 3.
Алгоритм начинается определением положения головы оператора (этап 1900). Например, система захвата движения может определять положение головы оператора в трех измерениях. Затем алгоритм генерирует данные о положении (этап 1902). Алгоритм осуществляет мониторинг перемещения головы оператора (этап 1904). В этих пояснительных примерах система захвата движения может осуществлять мониторинг любого изменения в положении и/или ориентации головы оператора.
Определяется, было ли обнаружено перемещение головы оператора (этап 1906). Если перемещение не было обнаружено, то алгоритм возвращается на этап 1904. Если перемещение было обнаружено, то алгоритм возвращается на этап 1900 для определения нового положения головы оператора. Таким образом, система захвата движения используется для непрерывного отслеживания перемещения и непрерывной выработки данных о положении головы оператора.
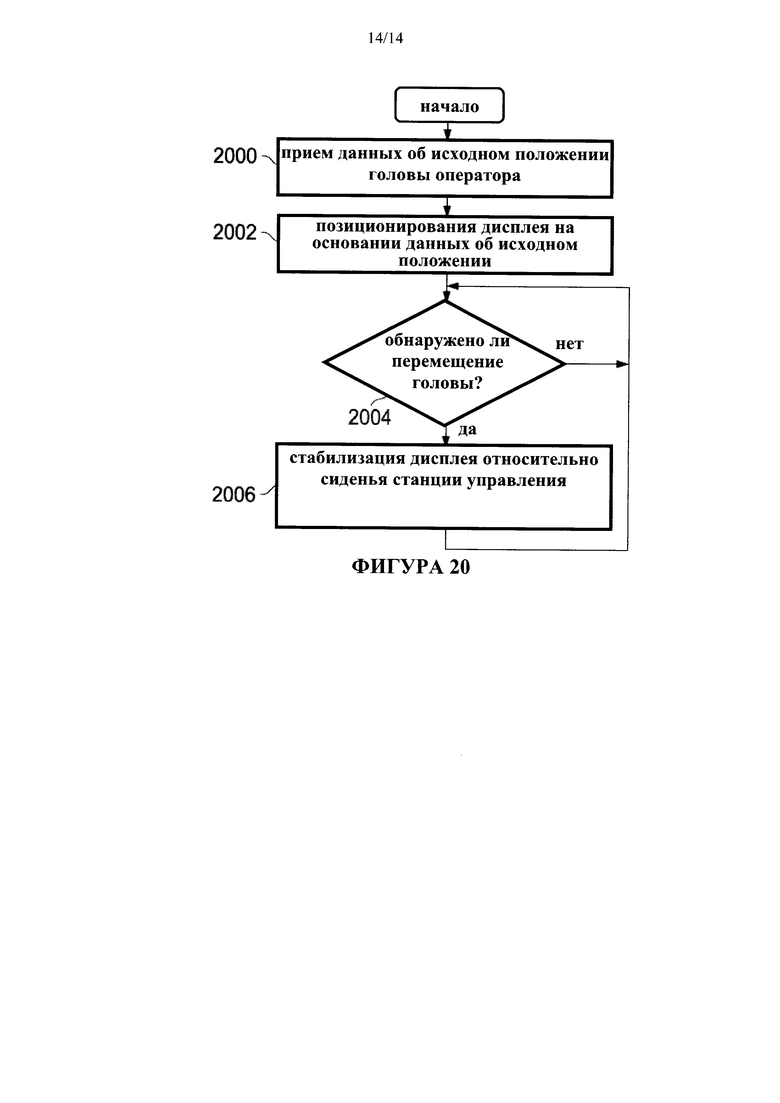
Теперь обратимся к фиг. 20, на которой показана блок-схема алгоритма для стабилизации дисплея согласно пояснительному варианту реализации. Алгоритм, показанный на фиг. 20, может быть воплощен с использованием, например, без ограничения, системы 309 и системы 360 станции 308, представленной на фиг. 3.
Алгоритм начинается приемом данных об исходном положении головы оператора (этап 2000). Данные об исходном положении головы оператора генерируются системой захвата движения и принимаются процессором в системе обработки данных. Затем алгоритм позиционирует дисплей на основании данных об исходном положении (этап 2002). Например, дисплей может подвергаться позиционированию относительно кресла управляющей станции. В этих пояснительных примерах дисплей показывается оператору с использованием головной дисплейной системы. В этих примерах дисплей представляет собой виртуальное представление физических дисплеев.
Затем алгоритм определяет, было ли обнаружено перемещение головы оператора (этап 2004). Для того чтобы определить, произошло ли перемещение головы оператора, процессор осуществляет мониторинг входных данных от системы захвата движения. Если перемещение не было обнаружено, то алгоритм возвращается на этап 2004, с тем чтобы продолжить мониторинг перемещения головы оператора.
Если перемещение головы оператора обнаружено, то алгоритм регулирует дисплей с целью его стабилизации для оператора, т.е. обеспечения его неподвижности относительно управляющей станции (этап 2006). Иными словами, оператору кажется, что дисплей остается неподвижным относительно управляющей станции, даже когда голова оператора переместилась. Для осуществления этих настроек дисплея процессор исполняет программный код. Таким образом, дисплей может оставаться в одной и той же позиции даже при перемещении головы оператора и/или головной дисплейной системы. Затем алгоритм возвращается на этап 2004.
Функциональные схемы и блок-схемы в разных показанных вариантах реализации иллюстрируют архитектуру, функции и работу некоторых возможных воплощений предлагаемого устройства и предлагаемых способов. В этом отношении, каждый блок в функциональных схемах и блок-схемах может представлять модуль, сегмент, функцию и/или часть алгоритма либо этапа. В некоторых альтернативных воплощениях функция или функции, упомянутые в блоках, могут следовать не в том порядке, что показан на фигурах. Например, в некоторых случаях два блока, которые показаны следующими один за другим, могут исполняться в обратном порядке, в зависимости от предусмотренных функций.
Таким образом, разные пояснительные варианты реализации представляют устройство и способ для выполнения задачи с использованием управляющей станции. Управляющая станция содержит дисплейную систему; систему захвата движения; устройства ввода; кресло, связанное с устройствами ввода; и процессор. Дисплейная система выполнена с возможностью ее надевания на голову оператора и для предоставления этому оператору дисплея. Система захвата движения выполнена с возможностью отслеживания перемещения головы оператора. Процессор осуществляет коммуникацию с дисплейной системой, системой захвата движения и устройствами ввода. Процессор выполнен с возможностью исполнения программного кода с целью формирования дисплея и настройки дисплея, показываемого оператору, в ответ на обнаружение команд от устройств ввода и/или в ответ на обнаружение перемещения головы оператора.
Разные пояснительные варианты реализации предлагают управляющую станцию, которая имеет меньшую массу, чем существующие в настоящее время управляющие станции. Кроме того, разные пояснительные варианты реализации предлагают управляющую станцию, которая занимает меньше места, чем существующие в настоящее время управляющей станции. Разные пояснительные варианты реализации также предлагают управляющую станцию, которая включает в себя желаемые средства безопасности. В число этих средств безопасности могут входить, например, без ограничения, интегрированная кислородная система, средства, ограничивающие перемещение кресла, и/или другие средства безопасности. Кроме того, кресло управляющей станции может быть выполнено с возможностью настройки для вмещения оператора в защитном снаряжении, таком как бронежилет.
Разные пояснительные варианты реализации также предлагают управляющую станцию, которая потребляет меньше энергии и требует меньшего охлаждения, чем существующие в настоящее время управляющей станции. Указанное уменьшение потребления энергии может быть обусловлено тем, что управляющая станция имеет одну головную дисплейную систему, в противоположность нескольким более крупным физическим дисплеям в существующих управляющих станциях. Уменьшение количества дисплейных систем также способствует уменьшению выработки тепла и снижению необходимости в охлаждении.
Разные пояснительные варианты реализации также предлагают управляющую станцию с компонентами, выполненными с возможностью настройки, что может снизить утомление оператора и обеспечить возможность вмещения более широкого круга операторов, по сравнению с существующими управляющими станциями.
В целях наглядности, изобретение было описано на примере пояснительных вариантов реализации, однако не следует считать, что это описание является исчерпывающим, или что изобретение ограничено раскрытыми вариантами реализации. Для специалиста, обладающего средним уровнем знаний в данной области, очевидно большое количество возможных модификаций и изменений.
Несмотря на то, что разные пояснительные варианты реализации были описаны применительно к летательному аппарату, другие пояснительные варианты реализации могут быть применены в иных типах платформ. Например, без ограничения, другие пояснительные варианты реализации могут быть применены в подвижной платформе, стационарной платформе, расположенном на суше объекте, расположенном в воде объекте, расположенном в космосе объекте и/или другом подходящем объекте. Говоря точнее, разные пояснительные варианты реализации могут быть применены, например, без ограничения, в надводном судне, танке, средстве транспортировки персонала, поезде, космическом корабле, космической станции, подводной лодке, автомобиле, центре управления полетами авиации, электростанции, производственном предприятии, центре управления беспилотным транспортным средством, здании и/или других подходящих платформах.
Кроме того, разные пояснительные варианты реализации могут обеспечивать разные преимущества. Для настоящего описания варианты реализации были выбраны так, чтобы наилучшим образом разъяснить принципы осуществления изобретения и его практическое применение, с тем чтобы специалисты, обладающие средним уровнем знаний в данной области, могли уяснить сущность изобретения и могли предложить разные варианты его реализации с разными модификациями, в зависимости от намеченного применения.
ПРОМЫШЛЕННАЯ ПРИМЕНИМОСТЬ
Материалы, описанные в настоящей заявке, находят применение в управляющих станциях для воздушных и наземных платформ, которые используются для управления датчиками, оружием, коммуникационными системами, функциями безопасности, навигационными системами, системами управления полетом и/или любыми другими системами и функциями и их сочетаниями. Управляющие станции также используются в других подвижных платформах, таких как, например, без ограничения, надводные суда, подводные лодки, танки, космические корабли, космические станции и/или другие воздушно-космические, воздушные, космические и/или наземные платформы. Кроме того, управляющие станции также используются для неподвижных платформ, таких как, например, наземные станции, центры управления, командные и управляющие станции и центры и/или другие подобные платформы. Помимо этого, управляющие станции могут быть использованы в разных военных, коммерческих и/или космических изделиях, компонентах и областях.
В то время как автор в настоящей заявке описал предлагаемое изобретение на примере конкретных вариантов реализации, необходимо понимать, что это изобретение может быть модифицировано без выхода за рамки его сущности или определенного формулой объема.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОСТ УПРАВЛЕНИЯ КРАНОМ, ЭКСКАВАТОРОМ И Т.П. | 2017 |
|
RU2737565C2 |
| АВТОСТЕРЕОСКОПИЧЕСКИЙ ДИСПЛЕЙ РАСШИРЕННОЙ РЕАЛЬНОСТИ | 2013 |
|
RU2651611C2 |
| ПЛАТФОРМА РАСПРЕДЕЛЕНИЯ КОНТЕНТА ДЛЯ СРЕДЫ РАЗДАЧИ НАПИТКОВ | 2014 |
|
RU2674925C2 |
| Усовершенствованная система отображения информации | 2020 |
|
RU2783717C2 |
| МЕХАНИЗМЫ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ НА ОСНОВЕ КАМЕРЫ ДЛЯ ПОЛЬЗОВАТЕЛЕЙ УСТАНОВЛЕННЫХ НА ГОЛОВЕ ДИСПЛЕЕВ | 2014 |
|
RU2661857C2 |
| УСТРОЙСТВО И СПОСОБ ОБЪЕДИНЕНИЯ МНОЖЕСТВЕННЫХ ЗАПИСЕЙ В СИСТЕМЕ ЭЛЕКТРОННЫХ КАРТ КОНТРОЛЬНОЙ ПРОВЕРКИ, СЧИТЫВАЕМЫЙ ПРОЦЕССОРОМ НОСИТЕЛЬ | 2017 |
|
RU2745332C2 |
| КОНТЕКСТНАЯ ПЛАТФОРМА И ПРИЛОЖЕНИЯ ВСПОМОГАТЕЛЬНОГО ДИСПЛЕЯ | 2005 |
|
RU2393532C2 |
| УБИРАЮЩАЯСЯ КОМПЬЮТЕРНАЯ РАБОЧАЯ СТАНЦИЯ | 2014 |
|
RU2675123C2 |
| АППАРАТНО-ПРОГРАММНЫЙ КОМПЛЕКС SCANME | 2015 |
|
RU2624874C2 |
| СТОЙКИЙ К МЕХАНИЧЕСКИМ КОНТАКТНЫМ ПОВРЕЖДЕНИЯМ СЛОЙ УЛЬТРАТОНКОГО СТЕКЛА НА ПОДЛОЖКЕ СЕНСОРНОГО ДИСПЛЕЯ | 2016 |
|
RU2713965C2 |
Изобретение относится к управляющим станциям. Управляющая станция для подвижных и неподвижных платформ содержит первую управляющую станцию, расположенную в первой платформе, содержащую управляющую систему для получения информации для задачи; дисплейную систему для ее надевания на голову оператора станции; систему захвата движения на основе инерционного датчика, отслеживающую перемещения головы; пользовательское устройство ввода. Также имеется кресло, связанное с пользовательским устройством; кислородная система управляющей станции; рабочая поверхность и процессор, сообщающийся с дисплейной системой, системой захвата движения и пользовательским устройством ввода. Повышается компактность станции. 2 н. и 14 з.п. ф-лы, 20 ил.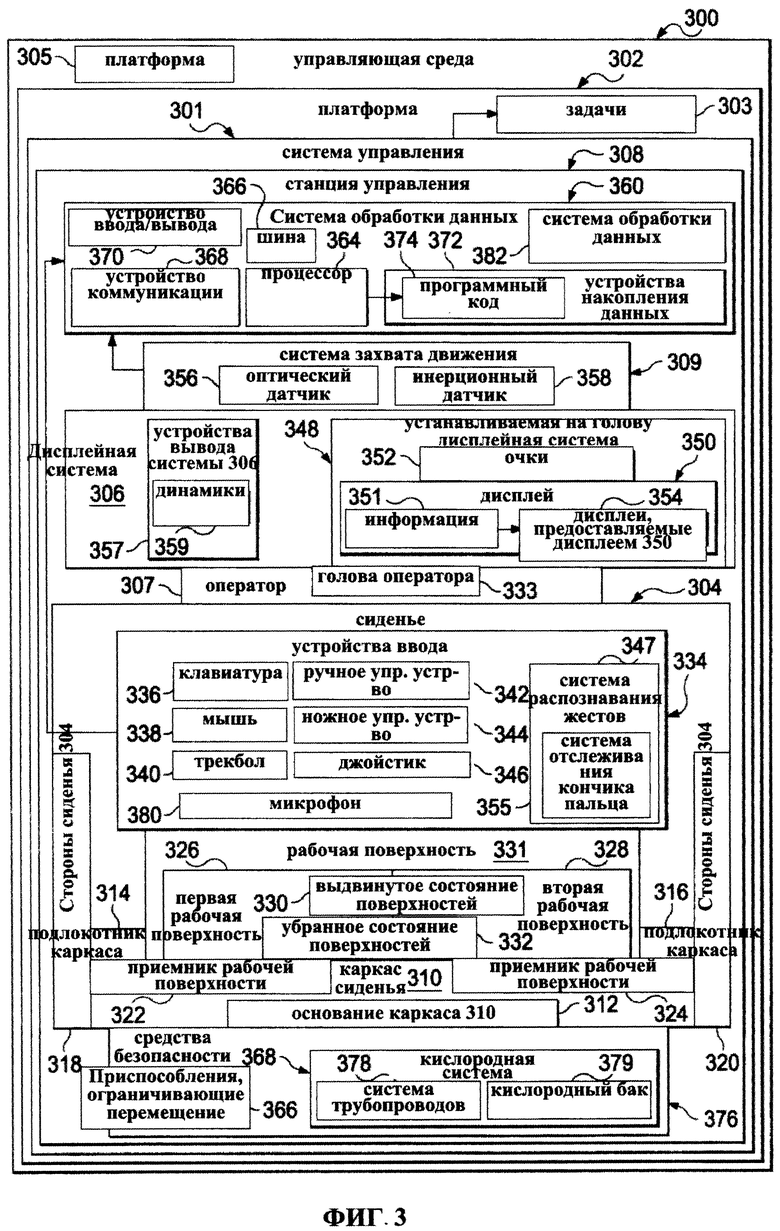
1. Управляющая станция для подвижных и неподвижных платформ, содержащая первую управляющую станцию, расположенную в первой платформе и содержащую:
управляющую систему, выполненную с возможностью получения информации для задачи, предназначенной для выполнения, совместно используя указанную информацию, первую управляющую станцию и управляющую станцию,
дисплейную систему, выполненную с возможностью ее надевания на голову оператора первой управляющей станции и предоставления этому оператору дисплея, так что указанный дисплей содержит три виртуальных представления физических окон, представляющих данные, причем каждое из указанных трех виртуальных представлений выполнено с возможностью перемещения относительно двух других, указанный дисплей выполнен с возможностью оставаться неподвижным в трех измерениях относительно первой управляющей станции при перемещении головы, дисплейная система дополнительно выполнена с возможностью осуществления коммуникации в пределах первой платформы и между первой платформой и второй платформой и с возможностью обмена информацией для совместного решения проблемы со второй управляющей станцией, причем вторая управляющая станция расположена в одном из следующего: первой платформе и второй платформе, так что когда первая управляющая станция и вторая управляющая станция обе расположены в первой платформе, каждое физическое окно выполнено с возможностью реконфигурирования, чтобы быть видимым для первого оператора в первой управляющей станции в первой платформе и второго оператора во второй управляющей станции в первой платформе одновременно, пока первый оператор в первой управляющей станции и второй оператор во второй управляющей станции видимы друг для друга;
систему захвата движения на основе инерционного датчика, выполненную с возможностью отслеживания перемещения головы;
пользовательское устройство ввода, выполненное с возможностью настройки: размера, ориентации и расположения заданного количества дисплеев в дисплейной системе;
кресло, связанное с пользовательским устройством ввода и имеющее сторону, которая имеет подлокотник, причем подлокотник имеет область для хранения;
кислородную систему управляющей станции, содержащую источник кислорода и трубопроводную систему, которая содержит совокупность трубопроводов, причем источник кислорода и совокупность трубопроводов расположены в месте, представляющем собой одно из следующего: прикреплены к креслу, расположены внутри кресла и представляют собой часть кресла;
рабочую поверхность, которая соединена с возможностью поворота с опорой, причем опора и рабочая поверхность расположены в области для хранения подлокотника с возможностью выдвигаться из нее, и
процессор, сообщающийся с дисплейной системой, системой захвата движения и пользовательским устройством ввода и выполненный с возможностью исполнения программного кода для формирования дисплея и настройки дисплея, предоставленного оператору, в ответ на обнаружение перемещения головы этого оператора.
2. Управляющая станция по п. 1, дополнительно содержащая:
средства безопасности, связанные с креслом.
3. Управляющая станция по п. 1, в которой источник кислорода представляет собой кислородный бак.
4. Управляющая станция по п. 1, в которой в качестве пользовательского устройства ввода выбрано по меньшей мере одно из следующих устройств: клавиатура, трекбол, ручное управляющее устройство, ножное управляющее устройство, система распознавания жестов, мышь, система отслеживания кончика пальца, микрофон и джойстик.
5. Управляющая станция по п. 1, в которой кресло выполнено с возможностью настройки.
6. Управляющая станция по п. 1, в которой кресло содержит:
каркас;
указанный подлокотник, представляющий собой первый подлокотник, связанный с каркасом;
второй подлокотник, связанный с каркасом;
первую рабочую поверхность, относящуюся к указанной рабочей поверхности, с возможностью перемещения присоединенную к первому подлокотнику; и
вторую рабочую поверхность, относящуюся к указанной рабочей поверхности, с возможностью перемещения присоединенную к второму подлокотнику, причем первая и вторая рабочие поверхности выполнены с возможностью перемещения между выдвинутым состоянием и закрытым состоянием, а когда указанные первая и вторая поверхности выдвинуты, они образуют единую рабочую поверхность.
7. Управляющая станция по п. 6, в которой первая рабочая поверхность выполнена с возможностью перемещения вдоль первого подлокотника, а вторая рабочая поверхность выполнена с возможностью перемещения вдоль второго подлокотника.
8. Управляющая станция по п. 6, в которой пользовательское устройство ввода содержит клавиатуру, имеющую первую секцию, прикрепленную к первой рабочей поверхности, и вторую секцию, прикрепленную к второй рабочей поверхности.
9. Управляющая станция по п. 7, в которой пользовательское устройство ввода дополнительно содержит указывающее устройство, прикрепленное к первой рабочей поверхности или второй рабочей поверхности.
10. Управляющая станция по п. 1, в которой процессор расположен по меньшей мере в одном из следующих объектов: система обработки данных, связанная с креслом, дисплейная система и дистанционная система обработки данных.
11. Управляющая станция по п. 1, в которой в качестве первой платформы использована, использован или использовано: стационарная платформа, расположенный на суше объект, расположенный в воде объект, расположенный в космосе объект, летательный аппарат, надводное судно, танк, средство транспортировки персонала, поезд, космический корабль, космическая станция, подводная лодка, автомобиль, центр управления полетами авиации, электростанция, производственное предприятие, центр управления необитаемым транспортным средством или здание.
12. Управляющая станция по п. 11, в которой пользовательское устройство ввода выполнено с возможностью управления работой указанной платформы.
13. Способ работы управляющей станции для подвижных и неподвижных платформ, содержащий:
получение на контрольной системе информации для задачи,
выполнение задачи с использованием информации и первой управляющей станции совместно со второй управляющей станцией, так что использование первой управляющей станции содержит:
предоставление дисплея первому оператору в первой управляющей станции с использованием дисплейной системы, выполненной с возможностью ее надевания на голову первого оператора;
предоставление указанного дисплея, содержащего три виртуальных представления физических окон, представляющих данные, причем каждое из указанных трех виртуальных представлений выполнено с возможностью перемещения относительно двух других, указанный дисплей выполнен с возможностью оставаться неподвижным в трех измерениях относительно первой управляющей станции при перемещении головы, дисплейная система дополнительно выполнена с возможностью осуществления коммуникации в пределах первой платформы и между первой платформой и второй платформой и с возможностью обмена информацией для совместного решения проблемы со второй управляющей станцией, причем вторая управляющая станция расположена в одном из следующего: первой платформе и второй платформе, так что когда первая управляющая станция и вторая управляющая станция обе расположены в первой платформе, каждое физическое окно выполнено с возможностью реконфигурирования, чтобы быть видимым для первого оператора в первой управляющей станции в первой платформе и второго оператора во второй управляющей станции в первой платформе одновременно, пока первый оператор в первой управляющей станции и второй оператор во второй управляющей станции видимы друг для друга;
отслеживание перемещения головы с использованием системы захвата движения на основе инерционного датчика;
связывание пользовательского устройства ввода, выполненного с возможностью настройки: размера, ориентации и расположения заданного количества дисплеев в дисплейной системе, с креслом, связанным с первой управляющей станцией, причем кресло содержит:
сторону, которая имеет подлокотник, причем подлокотник имеет область для хранения;
рабочую поверхность, которая соединена с возможностью поворота с опорой, причем опора и рабочая поверхность расположены в области для хранения подлокотника с возможностью выдвигаться из нее,
процессор, выполненный с возможностью исполнения программного кода для формирования дисплея и настройки дисплея, предоставленного оператору, в ответ на обнаружение перемещения головы указанного первого оператора, и
кислородную систему, содержащую источник кислорода, и трубопроводную систему, которая содержит совокупность трубопроводов, причем источник кислорода и совокупность трубопроводов расположены в первом месте, представляющим собой одно из следующего: прикреплены к креслу, расположены внутри кресла и представляют собой часть кресла.
14. Способ по п. 13, дополнительно содержащий:
отображение информации с использованием дисплейной системы;
получение пользовательского ввода в пользовательском устройстве ввода и
генерирование управляющего сигнала.
15. Способ по п. 13, в котором первая управляющая станция расположена на расстоянии от первой платформы.
16. Способ по п. 15, в котором на расстоянии от первой платформы имеется одно из следующего: стационарная платформа, расположенный на суше объект, расположенный в воде объект, расположенный в космосе объект, летательный аппарат, надводное судно, танк, средство транспортировки персонала, поезд, космический корабль, космическая станция, подводная лодка, автомобиль, центр управления полетами авиации, электростанция, производственное предприятие, центр управления необитаемым транспортным средством или здание.
| US 2008208396 A1, 28.08.2008 | |||
| US 2006119576 A1, 08.06.2006 | |||
| US 2005206583 A1, 22.09.2005 | |||
| US 2008164729 A1, 10.07.2008 | |||
| СПОСОБ И КОМПЛЕКС СРЕДСТВ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2005 |
|
RU2351000C2 |

