Область техники, к которой относится изобретение
Изобретение относится к средствам управления летательными аппаратами, предназначенными прежде всего для обнаружения чрезвычайных ситуаций, вызванных природными и техногенными причинами, и ликвидации их последствий. В качестве полезной нагрузки таких летательных аппаратов применяют средства наблюдения и контроля, а также средства ликвидации чрезвычайной ситуации, например воду для тушения пожаров.
Изобретение особенно актуально при применении летательных аппаратов для своевременного выявления чрезвычайных ситуаций и организации работ по ликвидации их последствий для сохранения жизни и здоровья людей, уменьшения материального ущерба и предотвращения загрязнения окружающей среды.
Уровень техники
Известен способ и комплекс штатных средств управления противопожарным самолетом, предназначенным для обнаружения очага пожара и сброса на него воды по патенту США №5878819.
Известен способ и комплекс штатных средств управления противопожарным гидросамолетом, способным производить заправку водой с поверхности водоема и сбрасывать ее на очаг пожара, по патенту России №2174934.
Аналогом изобретения является способ и комплекс средств управления беспилотными летательными аппаратами, предназначенными для обнаружения и ликвидации чрезвычайной ситуации, обусловленной пожаром, по патенту США №6364026. Он включает в себя беспилотный летательный аппарат наблюдения, беспилотные летательные аппараты тушения и наземную станцию дистанционного управления их полетами с человеком-оператором.
Прототипом изобретения по числу и содержанию функционально сходных признаков является система управления летательным аппаратом по патенту США №5240207, в котором штатные средства управления летательным аппаратом переоборудованы в средства дистанционного управления с помощью наземной станции, превратившие пилотируемый самолет в беспилотный летательный аппарат.
Система-прототип включает летательный аппарат, в кабине которого установлены платформы, присоединенные силовыми приводами к управляющему оборудованию, предназначенному для управления действиями летательного аппарата, первая видеокамера для записи изображения информационно-управляющего поля кабины, вторая видеокамера для записи изображения вне кабины и приемо-передающая радиоаппаратура для связи со станцией управления.
На станции управления летательным аппаратом размещены аппаратные средства поддержки управляющего оборудования на летательном аппарате, адаптированные для приема и отображения видеоизображений от первой и второй видеокамер, а также для выработки и передачи сигналов команд дистанционного управления летательным аппаратом.
В указанном прототипе изображение информационно-управляющего поля кабины летательного аппарата, полученное с помощью первой видеокамеры, и информация об обстановке в окружающем воздушном пространстве и на земле, полученная с помощью второй видеокамеры, передаются на станцию управления и отображаются на мониторе. Оператор станции управления анализирует эту информацию, выбирает и исполняет команды управления, которые передаются на борт летательного аппарата и приводят в действие силовые приводы управляющего оборудования для выполнения летательным аппаратом необходимых действий. Этот процесс управления многократно повторяется во время полета летательного аппарата.
В системе управления летательным аппаратом по патенту США №5240207 реализован только один режим - дистанционное пилотирование оператором станции управления. Автоматическое управление летательным аппаратом не предусмотрено. Для осуществления пилотируемого режима полета необходимо вернуть конструкцию этого летательного аппарата в исходное состояние, то есть демонтировать все дополнительные средства управления. При этом дистанционное пилотирование этим летательным аппаратом становится невозможным.
В условиях чрезвычайной ситуации при плохой видимости из-за задымленности, тумана, облачности такое дистанционное управление летательными аппаратами может быть крайне ограниченным или вообще неприемлемым.
Сущность изобретения
Патентуемое изобретение решает задачу управления летательным аппаратом во всех возможных режимах управления: в пилотировании летчиком с помощью штатных средств управления, в дистанционном управлении оператором станции управления, в автоматическом режиме по командам технических средств станции управления и в автономном автоматическом режиме по командам бортового радиоэлектронного оборудования летательного аппарата.
Для выполнения дистанционного, автоматического и автономного автоматического управления летательным аппаратом установлены силовые приводы управляющего оборудования, система их включения и выключения, а также аппаратные и программные средства поддержки на борту летательного аппарата и на станции управления. Любой из режимов управления может быть многократно включен или выключен в течение одного полета летчиком или дистанционно оператором станции управления, или автоматически без каких-либо конструктивных изменений летательного аппарата и без ущерба для его последующей работы в других режимах управления.
Патентуемый комплекс включает в себя:
- летательный аппарат, имеющий кабину, которая содержит управляющее оборудование для управления действиями летательного аппарата;
- платформы, установленные в кабине летательного аппарата вблизи управляющего оборудования, предназначенного для управления летательным аппаратом;
- силовые приводы, присоединенные к управляющему оборудованию и к платформам в подвижном соединении;
- систему управления силовыми приводами;
- станцию управления, удаленную от летательного аппарата и включающую в себя технические средства поддержки управляющего оборудования на летательном аппарате, адаптированные для приема и обработки сигналов о показаниях приборов, датчиков и состоянии управляющего оборудования летательного аппарата, а также для выработки и передачи сигналов команд управления летательным аппаратом;
- средства выработки сигналов, характеризующих показания приборов, датчиков и состояние управляющего оборудования летательного аппарата, установленные на борту летательного аппарата;
- приемо-передающую радиоэлектронную аппаратуру, установленную на борту летательного аппарата, предназначенную для передачи на станцию управления сигналов о показаниях приборов, датчиков и состоянии управляющего оборудования летательного аппарата и для приема со станции команд управления;
- средства приема и обработки сигналов о показаниях приборов, датчиков и состоянии управляющего оборудования летательного аппарата на станции управления с использованием приемо-передающей радиоэлектронной аппаратуры;
- средства выработки сигналов команд управления летательным аппаратом на станции управления;
- средства многократной передачи сигналов команд управления летательным аппаратом, выработанных на станции управления, на систему управления силовыми приводами на летательном аппарате таким образом, что отклонение и ориентация управляющего оборудования на летательном аппарате соответствует командам технических средств поддержки станции управления для выполнения летательным аппаратом требуемых действий.
Патентуемый комплекс дополнительно содержит в себе:
- управляемые средства сцепления силовых приводов с управляющим оборудованием летательного аппарата;
- средства включения и выключения управляемых средств сцепления силовых приводов с управляющим оборудованием летательного аппарата с возможностью их активизации летчиком в пилотируемом режиме, оператором станции управления дистанционно и автоматически с помощью технических средств, размещенных на борту летательного аппарата и на станции управления;
- установленную на летательном аппарате бортовую электронно-вычислительную машину (ЭВМ) для осуществления режимов дистанционно пилотируемого, автоматического и автономного автоматического управления летательным аппаратом;
- интерфейсное устройство ввода/вывода сигналов и команд, установленное на летательном аппарате между бортовой ЭВМ и датчиками, приборами и системой управления силовыми приводами;
- установленные на летательном аппарате средства спутниковой системы радионавигации для точного определения координат местонахождения летательного аппарата;
- установленное на станции управления оборудование системы навигации и посадки.
В патентуемом комплексе средств управления летательным аппаратом управляемые средства сцепления силовых приводов с управляющим оборудованием летательного аппарата могут быть выполнены в виде электромеханических устройств, в частности в виде электрических муфт.
В патентуемом комплексе средств управления летательным аппаратом станция управления может быть установлена на наземной стационарной или мобильной платформе.
В патентуемом комплексе средств управления летательным аппаратом станция управления может быть установлена на морской стационарной или мобильной платформе.
В патентуемом комплексе средств управления летательным аппаратом станция управления может быть установлена на воздушной стационарной или мобильной платформе.
В патентуемом комплексе средств управления летательным аппаратом станция управления может быть установлена на космической платформе.
Перечень фигур чертежей
В дальнейшем изобретения поясняются конкретными примерами их выполнения со ссылками на прилагаемые чертежи, на которых изображены:
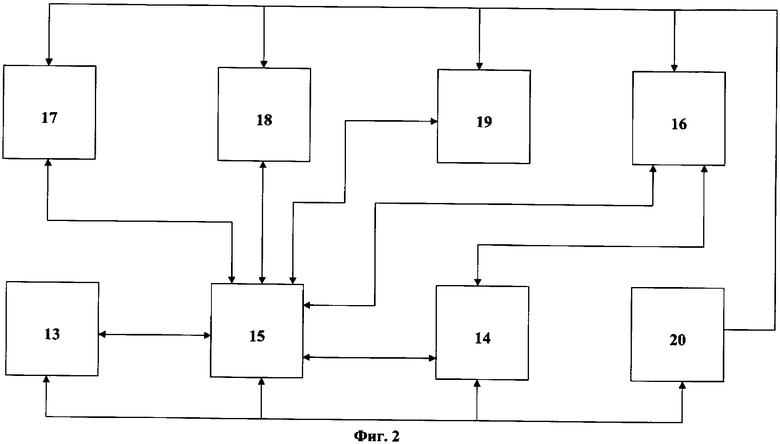
Фигура 1 - Структурная схема бортового оборудования летательного аппарата.
Фигура 2 - Структурная схема станции управления.
Осуществление изобретения
В пилотируемом режиме управления летательным аппаратом летчиком 1 (фигура 1) управляемые средства сцепления 2 с помощью средств их включения и выключения 3 отсоединяют силовые приводы 4 от управляющего оборудования 5. Летчик 1 непосредственно воздействует на управляющее оборудование 5, используя штатные приборы, датчики и оборудование 6. Летчик 1 может самостоятельно управлять полезной нагрузкой 7 и передавать получаемые с ее помощью данные на станцию управления с помощью средств радиосвязи 8. Управление полезной нагрузкой 7 могут осуществлять оператор и технические средства станции управления с применением средств радиосвязи 8.
В режиме дистанционного управления летательным аппаратом оператором станции управления управляемые средства сцепления 2 с помощью средств их включения и выключения 3 присоединяют силовые приводы 4 к управляющему оборудованию 5 (фигура 1). Управляющие команды оператора станции управления поступают через средства радиосвязи 8 на систему управления силовыми приводами 9, приводя в действие управляющее оборудование 5 через силовые приводы 4 и управляемые средства сцепления 2 для совершения летательным аппаратом необходимых действий. В бортовой ЭВМ 10 обрабатываются данные от штатных приборов, датчиков и оборудования 6, полученные через интерфейсное устройство ввода/вывода сигналов и команд 11, а также сигналы, поступившие непосредственно от приемника спутниковой системы радионавигации 12, которые далее передаются через средства радиосвязи 8. Полученные на станции управления данные о точных координатах местонахождения летательного аппарата, о его положении в пространстве и характеристиках движения, а также о показаниях приборов, датчиков и о состоянии бортового оборудования анализируются оператором для многократной выработки им и передачи на летательный аппарат необходимых управляющих команд. Управление полезной нагрузкой 7 осуществляет оператор станции управления.
В режиме автоматического управления летательным аппаратом по командам технических средств станции управления управляемые средства сцепления 2 с помощью средств их включения и выключения 3 присоединяют силовые приводы 4 к управляющему оборудованию 5 (фигура 1). Управляющие команды технических средств станции управления поступают через средства радиосвязи 8 на систему управления силовыми приводами 9, приводя в действие управляющее оборудование 5 через силовые приводы 4 и управляемые средства сцепления 2 для совершения летательным аппаратом необходимых действий. Для выработки управляющих команд техническими средствами станции управления используются данные о местонахождении, положении и движении летательного аппарата и о состоянии его оборудования, полученные таким же образом, как и в случае режима дистанционного управления. Управление средствами полезной нагрузки 7 осуществляется оператором станции управления или техническими средствами станции управления по программе, введенной до полета или в процессе его выполнения.
В автономном автоматическом режиме управления летательным аппаратом по командам его бортового радиоэлектронного оборудования управляемые средства сцепления 2 с помощью средств их включения и выключения 3 присоединяют силовые приводы 4 к управляющему оборудованию 5 (фигура 1). Управляющие команды вырабатываются в бортовой ЭВМ 10 в соответствии с введенной в нее программой полета. Далее они поступают через интерфейсное устройство ввода/вывода сигналов и команд 11 на систему управления силовыми приводами 9, приводя в действие управляющее оборудование 5 через силовые приводы 4 и управляемые средства сцепления 2 для совершения летательным аппаратом необходимых действий. В качестве исходных данных для выработки управляющих команд бортовой ЭВМ 10 используются показания штатных приборов, датчиков и оборудования 6, поступающих через интерфейсное устройство ввода/вывода 11, а также сигналы приемника спутниковой системы радионавигации 12, поступающие непосредственно в бортовую ЭВМ 10. Они позволяют бортовой ЭВМ 10 определить координаты точного местонахождения летательного аппарата, его положение в пространстве, характеристики движения и состояние оборудования. В случае отличия этих данных от введенного в бортовую ЭВМ 10 полетного задания вырабатываются соответствующие команды коррекции положения и движения летательного аппарата. Управление средствами полезной нагрузки осуществляется оператором станции управления или бортовыми средствами летательного аппарата по программе, введенной до полета или в процессе его выполнения.
Смена режимов управления летательным аппаратом может быть многократно произведена путем воздействия на средства включения и выключения 3 управляемых средств сцепления 2 летчика 1, управляющих команд оператора станции управления, поступающих через средства радиосвязи 8, и управляющих команд бортовой ЭВМ 10, поступающих через интерфейсное устройство ввода/вывода 11.
В состав станции управления входят рабочее место оператора летательного аппарата 13 (фигура 2), рабочее место оператора полезной нагрузки 14, вычислительный комплекс 15, средства визуализации 16, средства приема и передачи данных 17, оборудование системы навигации и посадки 18, оборудование аэродромной и внутренней связи 19 и система питания 20.
В пилотируемом режиме оператор летательного аппарата станции управления непосредственно не участвует в его управлении. Он может контролировать показания бортовых штатных приборов, датчиков и оборудования, передаваемые на средства приема и передачи данных 17, обрабатываемые в вычислительном комплексе 15 и отображаемые на мониторах рабочего места оператора летательного аппарата 13 и на средствах визуализации 16 (фигура 2). Оператор летательного аппарата станции управления может выдать команду на включение дистанционно пилотируемого, автоматического или автономного автоматического режимов управления. Оператор полезной нагрузки со своего рабочего места 14 через вычислительный комплекс 15 и средства приема и передачи данных 17 может управлять средствами полезной нагрузки, установленными на борту летательного аппарата. По этому же каналу приема и передачи данных он может принимать и анализировать информацию от средств полезной нагрузки, которая отображается на мониторах рабочего места оператора полезной нагрузки 14 и на средствах визуализации 16.
В режиме дистанционного пилотирования оператор летательного аппарата станции управления получает на мониторах своего рабочего места 13 всю необходимую информацию о показаниях бортовых штатных приборов, датчиков и оборудования, о точных координатах местонахождения летательного аппарата, о его положении в пространстве и характеристиках движения. На основании анализа этих данных в соответствии с полетным заданием он выдает соответствующие команды управления, которые обрабатываются в вычислительном комплексе 15 и передаются на борт летательного аппарата с помощью средств приема и передачи данных 17. Оператор полезной нагрузки со своего рабочего места 14 через вычислительный комплекс 15 и средства приема и передачи данных 17 выдает команды управления средствами полезной нагрузки, также получает и анализирует поступающую от них информацию (фигура 2).
В режиме автоматического управления летательным аппаратом по командам технических средств станции управления в вычислительном комплексе 15 производится постоянная обработка поступающих данных о показаниях бортовых штатных приборов, датчиков и оборудования, о точных координатах местонахождения летательного аппарата, о его положении в пространстве и характеристиках движения и сравнение их с полетным заданием. В случае выявленных отклонений вырабатываются соответствующие команды управления, которые через средства приема и передачи данных 17 передаются на борт летательного аппарата (фигура 2). Оператор летательного аппарата станции управления в его управлении непосредственного участия не принимает. Однако он имеет возможность со своего рабочего места 13 контролировать полет и в случае необходимости изменить выполняемое полетное задание или изменить режим управления летательным аппаратом, например, взяв на себя дистанционное управление им. Полезной нагрузкой, как и в предыдущих случаях, управляет оператор полезной нагрузки со своего рабочего места 14 через вычислительный комплекс 15 и средства приема и передачи данных 17. Он же получает и анализирует поступающую от них информацию (фигура 2).
В автономном автоматическом режиме управления летательным аппаратом по командам его бортового радиоэлектронного оборудования оператор летательного аппарата на своем рабочем месте 13 получает необходимую информацию о показаниях бортовых штатных приборов, датчиков и оборудования, о точных координатах местонахождения летательного аппарата, о его положении в пространстве и характеристиках движения. В случае необходимости он имеет возможность изменить программу полетного задания или изменить режим управления летательным аппаратом. Оператор полезной нагрузки на своем рабочем месте 14 получает информацию от средств полезной нагрузки. Они могут работать как по командам бортовой ЭВМ летательного аппарата, так и по командам оператора полезной нагрузки.
Посадку летательного аппарата в пилотируемом режиме управления осуществляет летчик с помощью штатного управляющего оборудования. В дистанционно пилотируемом и автоматическом режимах управления команды для захода летательного аппарата на посадку и выполнения посадки вырабатываются с использованием оборудования системы навигации и посадки 18 на станции управления (фигура 2). Они передаются на борт летательного аппарата и исполняются так же, как и команды управления его полетом.
Оборудование аэродромной и внутренней связи 19 (фигура 2) обеспечивает радиосвязь между оператором летательного аппарата, оператором полезной нагрузки, обслуживающим персоналом летательного аппарата и станции управления, аэродромными службами и руководителем полетов, а также руководством операции по обнаружению чрезвычайной ситуации и ликвидации ее последствий, в проведении которой задействован данный летательный аппарат.
Система питания 20 (фигура 2) обеспечивает электропитание всего оборудования станции управления с использованием аэродромной электрической сети, автономного электрогенератора и бесперебойных источников питания на основе аккумуляторных батарей.
Промышленная применимость
Изобретение предназначено для управления летательными аппаратами, применяемыми прежде всего для обнаружения чрезвычайных ситуаций и ликвидации их последствий. Каждое из средств, использование которых предусмотрено изобретением, выпускается промышленностью разных стран. Предусмотренное изобретением взаимодействие средств реализуется в известных процессах различного назначения.
В Корпорации «Иркут» изобретение реализовано в варианте исполнения для МЧС России. Летательный аппарат изготовлен на основе модифицированного двухместного моторного планера модели S10-VT (произведенного фирмой Stemme, ФРГ), выполненного по однобалочной схеме с двухсекционным крылом большого удлинения и Т-образным хвостовым оперением. В качестве силовой установки использован двигатель ROTAX 914 мощностью 115 л.с. Шасси трехопорное с хвостовым колесом. Основные стойки шасси убираются в фюзеляж.
Управление в канале крена обеспечивается элеронами, путевое управление обеспечивается рулем направления, расположенным на киле, продольное управление - рулями высоты, установленными на хвостовом оперении. Рулевые поверхности отклоняются ручками и педалями, установленными в кабине, через тяги.
Левое кресло моторного планера используется летчиком для ручного пилотирования. Вместо демонтированного правого кресла в кабине установлено оборудование дистанционного и автоматического управления этим летательным аппаратом. В состав указанного оборудования входят управляемые средства сцепления, средства их включения и выключения, а также силовые приводы, присоединенные в подвижном соединении к управляющему оборудованию (ручкам и педалям) и к платформам, которые выполнены в виде жестко закрепленных опорных элементов конструкции.
На поверхности модифицированного моторного планера установлены антенны средств радиосвязи.
В состав штатных приборов, датчиков и оборудования модифицированного моторного планера входят приборы управления полетом (индикатор воздушной скорости, высотомер, магнитный компас) и приборы контроля двигателя (тахометр, указатель давления и температуры масла, указатель температуры головки цилиндра, вольтметр, амперметр, топливомер и индикатор наработки двигателя).
Для осуществления режимов автоматического и автономного автоматического управления в качестве датчиков обратной связи использованы малогабаритная инерциальная система как датчик координат, крена, тангажа, курса, путевого угла, вертикальной скорости, перегрузок и угловых скоростей, а также блок датчиков воздушных сигналов как датчик приборной скорости и относительной барометрической высоты.
В качестве полезной нагрузки использованы гиростабилизированная оптико-электронная система и радиолокационная станция, установленные в подвесных контейнерах под крылом модифицированного моторного планера.
Наземная станция изготовлена в мобильном варианте исполнения на базе автомобиля ЗИЛ 5301. Она включает в себя систему кондиционирования, систему энергоснабжения, рабочие места оператора летательного аппарата и оператора полезной нагрузки, вычислительный комплекс, средства отображения информации, оборудование системы навигации и посадки, а также средства приема и передачи данных, включая антенно-фидерную систему.
Созданный авиационный комплекс позволяет реализовать все возможные режимы управления указанным моторным планером: пилотируемый летчиком с помощью штатных средств управления, дистанционно пилотируемый оператором станции управления, автоматический по командам технических средств станции управления и автономный автоматический по командам бортового оборудования летательного аппарата.
Данный способ и комплекс средств управления летательным аппаратом были описаны со ссылками на примеры конкретного воплощения, изображенными на фиг.1 и 2. Данное изобретение может быть реализовано и в других модификациях и с другими дополнениями, не выходя за рамки и сферу заявляемой патентной формулы, которая заключается в следующем.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПОЛЕТОВ ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2008 |
|
RU2370416C1 |
| АВИАЦИОННАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ СПАСАТЕЛЬНЫХ РАБОТ | 2008 |
|
RU2381959C1 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ ПИЛОТАЖНЫЙ КОМПЛЕКС | 2006 |
|
RU2310909C1 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ КОМПЛЕКС ДИАГНОСТИКИ ПРОТЯЖЕННЫХ ОБЪЕКТОВ, ОСНАЩЕННЫХ СОБСТВЕННОЙ ИНФОРМАЦИОННОЙ СИСТЕМОЙ | 2007 |
|
RU2343438C1 |
| Способ обеспечения централизованного управления группы беспилотных летательных аппаратов с использованием сервера-агрегатора | 2023 |
|
RU2809495C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ РЕЗЕРВНОГО ВОЗВРАТА ОДНОМЕСТНОГО БОЕВОГО ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ОТКАЗЕ ЦЕНТРАЛЬНОГО ВЫЧИСЛИТЕЛЯ | 2023 |
|
RU2807539C1 |
| АЭРОМОБИЛЬНЫЙ КОМПЛЕКС БЕСПИЛОТНОГО ВЕРТОЛЕТА | 2009 |
|
RU2403181C1 |
| КОМПЛЕКС УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2004 |
|
RU2270471C1 |
| АВТОМАТИЗИРОВАННАЯ ВЫСОКОИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПОЛЕТОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2339547C9 |
| СИСТЕМА ИЗМЕРЕНИЯ ПРОСТРАНСТВЕННЫХ РАСПРЕДЕЛЕНИЙ ПАРАМЕТРОВ АТМОСФЕРЫ | 2014 |
|
RU2590229C2 |
Изобретение относится к области приборостроения и может найти применение для управления летательными аппаратами в чрезвычайных ситуациях. Технический результат - расширение функциональных возможностей. Для достижения данного результата установлены силовые приводы управляющего оборудования, система их включения и выключения, а также технические средства их поддержки на борту летательного аппарата и на станции управления. При этом вводят: управляемые средства сцепления силовых приводов с управляющим оборудованием летательного аппарата; средства включения и выключения управляемых средств сцепления силовых приводов с управляющим оборудованием летательного аппарата. 2 н. и 10 з.п. ф-лы, 2 ил.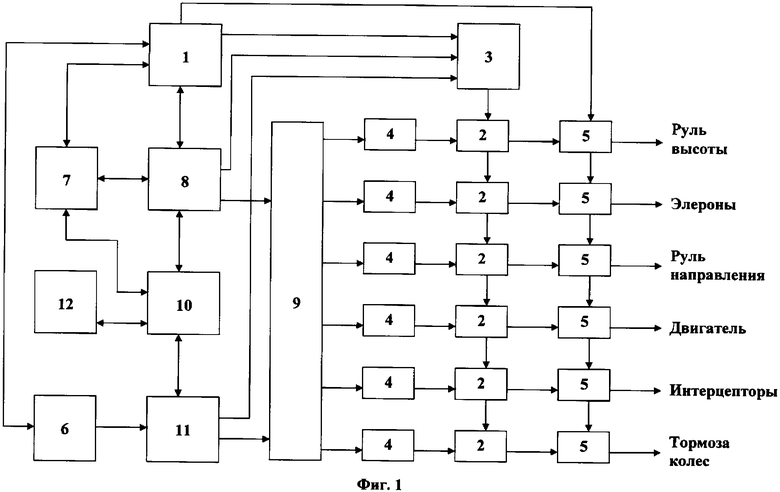
устанавливают платформы в кабине летательного аппарата вблизи управляющего оборудования, предназначенного для управления летательным аппаратом;
присоединяют силовые приводы к платформам и к управляющему оборудованию в подвижном соединении;
устанавливают систему управления силовыми приводами в кабине летательного аппарата;
сооружают станцию управления, удаленную от летательного аппарата и включающую в себя технические средства поддержки управляющего оборудования на летательном аппарате, адаптированные для приема и обработки сигналов, характеризующих показания приборов, датчиков и состояние управляющего оборудования летательного аппарата, а также для выработки и передачи сигналов команд управления летательным аппаратом;
передают с летательного аппарата сигналы, характеризующие показания приборов, датчиков и состояние управляющего оборудования летательного аппарата, с помощью бортовой приемопередающей радиоэлектронной аппаратуры;
принимают и обрабатывают сигналы, характеризующие показания приборов, датчиков и состояние управляющего оборудования летательного аппарата, на станции управления с использованием приемопередающей радиоэлектронной аппаратуры;
вырабатывают сигналы команд управления летательным аппаратом на станции управления;
многократно передают сигналы команд управления летательным аппаратом, выработанные на станции управления, на систему управления силовыми приводами на летательном аппарате таким образом, что отклонение и ориентация управляющего оборудования на летательном аппарате соответствует командам технических средств поддержки станции управления для выполнения летательным аппаратом требуемых действий, отличающийся тем, что
вводят управляемые средства сцепления силовых приводов с управляющим оборудованием летательного аппарата;
вводят средства включения и выключения управляемых средств сцепления силовых приводов с управляющим оборудованием летательного аппарата с возможностью их активизации летчиком в пилотируемом режиме, оператором станции управления дистанционно и автоматически с помощью технических средств, размещенных на борту летательного аппарата и/или на станции управления;
на летательном аппарате устанавливают бортовую электронно-вычислительную машину (ЭВМ) для осуществления режимов дистанционного, автоматического и автономного автоматического управления летательным аппаратом;
на летательном аппарате устанавливают интерфейсное устройство ввода/вывода сигналов и команд между бортовой ЭВМ и датчиками, приборами и системой управления силовыми приводами;
на летательном аппарате устанавливают средства спутниковой системы радионавигации для точного определения координат местонахождения летательного аппарата;
на станции управления устанавливают оборудование системы навигации и посадки;
путем включения и выключения управляемых средств сцепления подключают и отключают силовые приводы к управляющему оборудованию летательного аппарата для выбора пилотируемого режима или дистанционно управляемого, автоматического и автономного автоматического режимов управления летательным аппаратом;
в пилотируемом режиме отключают силовые приводы от управляющего оборудования посредством выключения управляемых средств сцепления и управляют летательным аппаратом с помощью находящегося в кабине летчика, использующего управляющее оборудование, приборы и датчики;
в режиме дистанционного управления подключают силовые приводы к управляющему оборудованию летательного аппарата посредством включения управляемых средств сцепления, принимают на станции управления переданные с борта летательного аппарата данные о точных координатах его местонахождения, о положении в пространстве и характеристиках движения, на основании анализа которых с помощью оператора станции управления многократно вырабатывают и передают соответствующие управляющие команды на летательный аппарат для их последующего выполнения исполнительным оборудованием;
в режиме автоматического управления подключают силовые приводы к управляющему оборудованию летательного аппарата посредством включения управляемых средств сцепления, принимают на станции управления переданные с борта летательного аппарата данные о точных координатах его местонахождения, о положении в пространстве и характеристиках движения, на основании автоматической обработки которых с помощью технических средств станции управления многократно вырабатывают и передают соответствующие управляющие команды на летательный аппарат для их последующего выполнения исполнительным оборудованием;
в режиме автономного автоматического управления подключают силовые приводы к управляющему оборудованию летательного аппарата посредством включения управляемых средств сцепления, используют для обработки данных о точных координатах местонахождения летательного аппарата, о его положении в пространстве и характеристиках движения бортовую ЭВМ, с помощью которой на летательном аппарате многократно вырабатывают соответствующие управляющие команды и выполняют их с применением исполнительного оборудования;
осуществляют посадку летательного аппарата в режимах дистанционно пилотируемого и автоматического управления путем выработки управляющих команд оборудованием навигации и посадки на станции управления, передачи их на борт летательного аппарата и последующего выполнения этих команд исполнительным оборудованием.
летательный аппарат, имеющий кабину, которая содержит управляющее оборудование для управления действиями летательного аппарата;
платформы, установленные в кабине летательного аппарата вблизи управляющего оборудования, предназначенного для управления летательным аппаратом;
силовые приводы, присоединенные к управляющему оборудованию и к платформам в подвижном соединении;
систему управления силовыми приводами;
станцию управления, удаленную от летательного аппарата и включающую в себя технические средства поддержки управляющего оборудования на летательном аппарате, адаптированные для приема и обработки сигналов, характеризующих показания приборов, датчиков и состояние управляющего оборудования летательного аппарата, а также для выработки и передачи сигналов команд управления летательным аппаратом;
средства выработки сигналов, характеризующих показания приборов, датчиков и состояние управляющего оборудования летательного аппарата, установленные на борту летательного аппарата;
приемопередающую радиоэлектронную аппаратуру, установленную на борту летательного аппарата, предназначенную для передачи на станцию управления сигналов, характеризующих показания приборов, датчиков и состояние управляющего оборудования летательного аппарата, и для приема со станции команд управления;
средства приема и обработки сигналов, характеризующих показания приборов, датчиков и состояние управляющего оборудования летательного аппарата, на станции управления с использованием приемопередающей радиоэлектронной аппаратуры;
средства выработки сигналов команд управления летательным аппаратом на станции управления;
средства многократной передачи сигналов команд управления летательным аппаратом, выработанных на станции управления, на систему управления силовыми приводами на летательном аппарате таким образом, что отклонение и ориентация управляющего оборудования на летательном аппарате соответствует командам технических средств поддержки станции управления для выполнения летательным аппаратом требуемых действий; отличающийся тем, что он дополнительно содержит в себе:
управляемые средства сцепления силовых приводов с управляющим оборудованием летательного аппарата;
средства включения и выключения управляемых средств сцепления силовых приводов с управляющим оборудованием летательного аппарата с возможностью их активизации летчиком в пилотируемом режиме, оператором станции управления дистанционно и автоматически с помощью технических средств, размещенных на борту летательного аппарата и/или на станции управления;
установленную на летательном аппарате бортовую ЭВМ для осуществления режимов дистанционно пилотируемого, автоматического и автономного автоматического управления летательным аппаратом;
интерфейсное устройство ввода/вывода сигналов и команд, установленное на летательном аппарате между бортовой ЭВМ и датчиками, приборами и системой управления силовыми приводами;
установленные на летательном аппарате средства спутниковой системы радионавигации для точного определения координат местонахождения летательного аппарата;
установленное на станции управления оборудование системы навигации и посадки.
| US 5240207 A1, 31.08.1993 | |||
| US 6364026 B1, 02.04.2002 | |||
| ВОДОЗАГРУЗОЧНОЕ УСТРОЙСТВО ПРОТИВОПОЖАРНОГО САМОЛЕТА | 1999 |
|
RU2174934C2 |
| US 5878819 A1, 09.03.1999 | |||
| СИСТЕМА УПРАВЛЕНИЯ С ПЕРЕНАСТРОЙКОЙ КООРДИНАТ | 1995 |
|
RU2145725C1 |

