Изобретение относится к посту управления краном, экскаватором, бульдозером или подобной строительной машиной, содержащему кресло, несколько приводимых в действие с кресла элементов управления для ввода управляющих команд, по меньшей мере одно устройство отображения информации, а также блок управления для формирования исполнительных сигналов в зависимости от введенных управляющих команд и/или передачи информации на устройство отображения. Кроме того, изобретение относится к крану с таким постом управления, который может быть выполнен, в частности, в виде кабины крановщика.
Краны, например башенно-поворотные краны, включают в себя в качестве поста управления кабину крановщика, которая вместе с краном может совершать определенные перемещения и она может быть размещена, например, на его башне. Обычно такие кабины крановщика включают в себя кресло, с которого крановщик может приводить в действие различные элементы управления, например джойстики, клавиши, регуляторы, ползунки и т.п., чтобы можно было вводить управляющие команды для крана. При этом указанные элементы управления распределены вокруг кресла, например на подлокотниках или опорах перед ним, так что водитель машины может удобно доставать до них. Кроме того, в поле зрения перед креслом расположены обычно дисплеи для отображения крановщику важной информации, например сервисную информацию, инструкции по эксплуатации или изображения с камер, установленных на кране или в окружающем пространстве. Обычно для различных информационных функций предусмотрены различные дисплеи, например дисплей для данных о кране, дисплей для камер и дополнительный дисплей для контроля рабочих зон и контроля помех.
Такие кабины крановщика могут быть оборудованы различными вспомогательными устройствами, которые непосредственно не управляют основными функциями машины или крана, а повышают комфорт водителя машины и делают надежнее эксплуатацию. Такие вспомогательные устройства могут включать в себя, например, кондиционер для регулирования микроклимата в кабине крановщика, аудиосистему с микрофоном и динамиком для связи с лицами снаружи крана или с другими ответственными за стройплощадку лицами, устройство освещения кабины и/или окружающего кран пространства или стеклоочиститель стекол кабины. Для управления этими вспомогательными устройствами обычно предусмотрены элементы управления, которые дополняют элементы управления собственно основными функциями крана или машины, так что при соответствующем числе элементов управления возникает проблема расположения всех их компактно в зоне досягаемости водителя машины.
В этом отношении осложняющим обстоятельством является то, что не все водители машин имеют одинаковый рост или руки одинаковой длины, а среди крановщиков есть как правши, так и левши. К тому же разные крановщики проявляют также разные предпочтения и интуитивные автоматизмы, которые возникают в результате многолетнего обслуживания кранов определенного типа. Задача, заключающаяся в том, чтобы в равной мере отвечать этим различным требованиям и обеспечить для любого водителя машины простое, комфортное, интуитивное и, тем самым, надежное обслуживание крана, трудна и пока решена лишь неудовлетворительно.
В основе изобретения лежит задача создания усовершенствованного поста управления упомянутого типа, а также усовершенствованного, оборудованного им крана, которые позволили бы избежать недостатков уровня техники и предпочтительным образом усовершенствовать его. В частности, должна быть обеспечена возможность более комфортного, интуитивного и, тем самым, надежного обслуживания поста управления, которое учитывало бы различия отдельных водителей машин и в равной мере оставался бы хороший обзор.
Согласно изобретению, эта задача решается посредством поста управления по п. 1 и крана по п. 37 формулы. Предпочтительные варианты осуществления изобретения являются объектом зависимых пунктов формулы.
Согласно первому аспекту изобретения, предложено выполнить элементы управления и/или устройство отображения поста управления и/или другие вспомогательные устройства с возможностью индивидуального конфигурирования, а также хранения и повторного вызова персональных предустановок, когда постом управления или крана должен управлять определенный водитель машины. Согласно изобретению, предусмотрено настроечное устройство для настройки и хранения индивидуальных предустановок эксплуатационных параметров и/или функций элементов управления и/или устройства отображения и/или других вспомогательных устройств и идентификационное устройство для идентификации соответствующего водителя машины на основе детектируемого идентифицирующего признака, причем блок управления выполнен с возможностью автоматического предоставления сохраненных предустановок на основе соответственно выявленного идентифицирующего признака. Благодаря этому пост управления можно предварительно конфигурировать на основе индивидуальных предпочтений и/или эргономических или физических данных соответствующего водителя машины, так что можно достичь интуитивной и за счет этого надежной эксплуатации крана, а при замене крановщика – сэкономить время.
Согласно изобретению, элементы управления и/или устройство отображения и/или другие вспомогательные устройства могут иметь различные предустановленные эксплуатационные параметры и/или функции. Например, элементы управления могут включать в себя механически подвижный рычаг управления, который выполнен с возможностью настройки в отношении сопротивления движению и/или возвратного усилия и/или возвратной скорости и/или длины. С помощью настроечного устройства можно настраивать и сохранять предпочтительное для водителя машины сопротивление движению и/или возвратную характеристику и/или длину рычага, причем сохраненные характеристики сохраняются вместе с идентифицирующим признаком крановщика, чтобы затем, когда водитель машины снова идентифицируется с помощью этого идентифицирующего признака, автоматически вызвать и выполнить предустановку.
При этом соответствующий водитель машины может идентифицироваться с помощью различных идентифицирующих признаков. Например, с помощью биометрического детектирующего устройства можно выявлять и сохранять один или несколько биометрических признаков, например отпечаток пальца, рисунок радужной оболочки, спектр частоты голоса и/или эргономические характеристики лица, которые затем при повторном запуске крана снова детектируются и сравниваются с сохраненными данными.
В качестве альтернативы или дополнительно к такому биометрическому распознаванию идентификация может осуществляться также с помощью электронного кода, присвоенного крановщику, в виде числового кода, который запрашивается устройством отображения и/или должен вводиться при пуске или до пуска крана в эксплуатацию через средства ввода на посту управления и/или заранее, например через клавиатуру, которая может отображаться на сенсорном экране. В качестве альтернативы или дополнительно крановщик может иметь также средство передачи данных, например в виде транспондера или магнитной карты, или ключ с персональным кодом, который считывается детектирующим устройством на посту управления.
В качестве альтернативы или дополнительно предварительное конфигурирование поста управления может осуществляться также с внешнего, отдельного от крана или машины прибора управления, который может обмениваться данными с краном или строительной машиной. Например, с помощью центрального онлайн-управления начальник водителя машины может передавать определенному водителю машины на устройство управления план работ и перечень заданий, например за счет того, что передается идентифицирующий водителя машины идентификационный код, благодаря чему пост управления может быть индивидуально конфигурирован уже заранее.
В качестве альтернативы или дополнительно к названной предустановке элементов управления они могут быть выполнены также с возможностью переменной функциональности и присвоения им различных управляющих функций, например таким образом, что правый джойстик может осуществлять на выбор подъем и опускание подъемного механизма, а также поворот крана, а левый джойстик – перемещение крановой тележки, или же названные функции могут быть предусмотрены также обратными.
В качестве альтернативы или дополнительно к такой предварительной конфигурации элементов управления устройство отображения может быть выполнено также с возможностью предварительной настройки различным образом. Например, различные поля отображения могут быть смещены на различные зоны дисплея или отображающей поверхности, что может быть затем персонализировано и снова вызвано соответствующим образом. В качестве альтернативы или дополнительно могут быть конфигурированы также различные отображающие поверхности, на которых различные поля отображения могут быть по-разному или индивидуально объединены, например таким образом, что любой пользователь может уложить свои предпочтительные или наиболее часто используемые поля отображения на определенную отображающую поверхность, которая может быть вызвана, например, в качестве предпочтительной поверхности.
Если устройство отображения включает в себя по меньшей мере один сенсорный экран, то предпочтительным образом может быть предусмотрено, что отображенные управляющие ключи или сенсорные поля или поля ввода смещены по положению и/или могут переменно настраиваться по своей чувствительности к срабатыванию и/или им описанным выше образом могут быть присвоены различные управляющие функции, что, в свою очередь, может быть персонализированно сохранено и снова вызвано.
Предпочтительным образом такой сенсорный экран может быть снабжен и/или связан с биометрическим датчиком, так что при касании сенсорного экрана детектируемый при этом узор отпечатка пальца может использоваться для автоматического вызова и выполнения хранящейся для этого предустановки. Например, настроенное на указательный палец поле ввода или сенсорное поле может быть смещено туда или предусмотрено там, где прикладывается указательный палец и определяется узор отпечатка приложенного пальца.
Устройство отображения может включать в себя, в принципе, позиционированные в разных местах сенсорные экраны. Согласно другому аспекту изобретения, такой сенсорный экран может быть предусмотрен на поверхности по меньшей мере одного рычага управления, который установлен подвижно и/или при жесткой установке снабжен подходящим детектирующим устройством, чтобы определять давление и/или ход и/или момент движения. За счет размещения сенсорного экрана на поверхности такого рычага управления можно расширить его функции. С одной стороны, с помощью сенсорного экрана на поверхности рычага управления можно формировать управляющие команды, например за счет смахиваний и/или нажатий на управляющие поля. В качестве альтернативы или дополнительно такой сенсорный экран может использоваться для отображения информации на рычаге управления, чтобы наглядно пояснить водителю машины функциональность рычага управления. В качестве альтернативы или дополнительно с помощью такого сенсорного экрана на рычаге управления может осуществляться также биометрическая регистрация. Сенсорный экран может быть выполнен предпочтительно трехмерным и/или встроен в криволинейный контур рычага управления.
В качестве альтернативы или дополнительно к такому сенсорному экрану на поверхности рычага управления устройство отображения может содержать также преимущественно трехмерный сенсорный экран вокруг подлокотника кресла поста управления, причем такой сенсорный экран может простираться, например, с обеих сторон или в виде многоколенного, в частности U-образного, корпуса с нескольких сторон подлокотника.
В качестве альтернативы или дополнительно сенсорный экран может быть встроен также в поверхность самого подлокотника и/или образовать поверхность подлокотника.
В качестве альтернативы или дополнительно также по меньшей мере один большой сенсорный экран может быть размещен на стенке и/или остеклении кабины поста управления и/или по меньшей мере частично образовать эту стенку и/или остекление кабины, причем под термином «остекление» могут подразумеваться, разумеется, также синтетические материалы. В качестве альтернативы или дополнительно также по меньшей мере одна отображающая поверхность и/или сенсорная поверхность управления может отображаться или проецироваться на стенку и/или остекление кабины, например посредством надголовного дисплея, который может отображать преимущественно на большой площади отображающую поверхность и/или поверхность управления по меньшей мере на значительной части стенки и/или остекления кабины.
В качестве альтернативы или дополнительно к указанным сенсорным экранам, с помощью которых вводятся управляющие команды, элементы управления могут содержать также по меньшей мере одно устройство детектирования жестов, посредством которого могут детектироваться мелкие или широкие движения тела водителя машины и преобразовываться в управляющие команды. Например, в качестве мелких жестов могут детектироваться движения пальца, например его смахивающие движения. В качестве широких движений тела могут детектироваться, например, движения руки или кисти или движения головы, такие как ее покачивание, или же движения ног. Посредством такого устройства детектирования жестов можно выявлять и преобразовывать в управляющие команды нужные срабатывания элементов управления, изображенных на проецированной или иным образом отображенной отображающей поверхности и/или поверхности управления, например на стенке и/или остеклении кабины.
Согласно другому аспекту изобретения, положения элементов управления и/или софт-клавиш на отображающей поверхности устройства отображения и/или его сенсорного экрана могут также динамически изменяться, а именно в зависимости от движений и/или положений и/или направления взгляда водителя машины. Для этого на посту управления могут быть предусмотрены подходящие детектирующие средства, которые определяют движения и/или положения, например, рук водителя машины и/или направление его взгляда и/или положение головы, чтобы в зависимости от этих выявленных параметров заставить двигаться и/или смещаться поля отображения и/или софт-клавиши, например с помощью руки и/или направления взгляда.
В качестве альтернативы или дополнительно положения элементов управления и/или софт-клавиш на отображающей поверхности устройства отображения и/или его сенсорного экрана могут динамически смещаться также в зависимости от движений и/или положений грузозахватного средства или другого релевантного элемента управляемой с поста управления машины. Такое управление положением элементов отображения и/или управления основано на том факте, что ось взгляда водителя машины во многих случаях или часто следует, в основном, за грузонесущим средством.
Согласно другому аспекту, также кресло поста управления и/или его ориентацию можно индивидуально подогнать под соответствующего водителя машины, причем предпочтительным образом можно сохранять и снова вызывать соответственно предпочтительные настройки в качестве персонализированных предустановок. Независимо от этого может быть предусмотрена автоматическая подгонка кресла под телосложение оператора, причем детектирующие средства для определения телосложения могут включать в себя, например, датчики давления в кресле и/или оптическую сенсорику для определения роста и/или объема тела водителя машины. Устройство управления креслом может приспосабливать различные параметры кресла, такие как твердость, высота, настройка ширины боковин и/или жесткость пружин или амортизации, автоматически или полуавтоматически в зависимости от детектированных признаков телосложения или соответствующих сигналов сенсорики.
Предпочтительным образом ориентация кресла может также динамически изменяться при эксплуатации и автоматически управляться, в частности в зависимости от соответственно выявленного направления взгляда крановщика и/или в зависимости от положения груза, что может детектироваться подходящими детектирующими средствами и реализовываться устройством управления креслом в его соответствующее движение, например наклон кресла вперед, когда грузовой крюк направляется у земли близко к башне.
В качестве альтернативы или дополнительно может быть предусмотрено также натяжение и/или позиционирование ремней и/или удерживающих скоб, что может происходить предпочтительно автоматически в зависимости от наклона кресла. В частности, удерживающий ремень или удерживающая скоба может натягиваться, когда кресло наклоняется вперед, и/или снова ослабляется, когда оно снова отклоняется назад.
Далее пост управления может содержать многозонную установку кондиционирования воздуха для позонного регулирования по-разному температуры и/или качества и/или влажности воздуха, причем климатическое, управляющее и/или детектирующее устройство содержит настроечные средства для настройки индивидуальных заданных значений для различных климатических зон.
При этом устройство отображения может иметь отображающую поверхность для отображения климатических зон, а настроечные средства – сенсорику для детектирования жестов и/или касаний отображающей поверхности.
Предпочтительно многозонная установка кондиционирования воздуха выполнена с возможностью переменной настройки в отношении размера и/или положения и/или контура климатических зон относительно кресла.
В качестве альтернативы или дополнительно пост управления может отличаться тем, что предусмотрено коммуникационное устройство для передачи голосовых и/или текстовых сообщений, подключенное к устройству отображения, которое содержит коммуникационную отображающую поверхность для отображения коммуникационной информации.
При этом коммуникационная отображающая поверхность может иметь изображение рабочей зоны и находящихся в ней возможных коммуникационных партнеров, причем предусмотрены маркировочные средства на коммуникационной отображающей поверхности для выделения коммуникационного партнера, с которым установлено или устанавливается коммуникационное соединение, и/или средства для выбора отображенного на изображении рабочей зоны коммуникационного партнера, а коммуникационное устройство в зависимости от сделанного на изображении рабочей зоны выбора устанавливает коммуникационное соединение с выбранным коммуникационным партнером.
Преимущественно пост управления включает в себя устройство контроля столкновений, которое на основе текущего или запланированного пути перемещения контролирует возможное столкновение с находящимся в рабочей зоне коммуникационным партнером, причем коммуникационное устройство выполнено с возможностью автоматического установления коммуникационного соединения с коммуникационным партнером, как только устройство контроля столкновений определит возможное столкновение с названным коммуникационным партнером.
Коммуникационное устройство может содержать кнопку экстренного вызова для установления экстренного соединения, причем коммуникационное устройство выполнено с возможностью передачи при установлении экстренного соединения других эксплуатационных данных, включающих данные датчиков и/или изображения с камер.
Далее может быть предусмотрено устройство получения метеоданных и/или данных метеопрогноза, причем коммуникационное устройство выполнено с возможностью автоматического установления соединения экстренного вызова погоды в зависимости от полученных метеоданных и/или данных метеопрогноза.
Согласно другому аспекту, посту управления придано противошумовое устройство для компенсации окружающего шума и/или уменьшения воздействующих на водителя машины в кресле шумовых нагрузок, причем названное противошумовое устройство включает в себя по меньшей мере один датчик детектирования шума, в частности микрофон, и по меньшей мере один звуковой генератор для генерирования противошума, причем предусмотрено устройство управления противошумом звукового генератора в зависимости от сигнала по меньшей мере одного датчика детектирования шума.
По меньшей мере один звуковой генератор может включать в себя по меньшей мере один вибратор, который размещен на стенке и/или остеклении кабины с возможностью вибрации ее стенки и/или остекления.
Преимущественно предусмотрены несколько датчиков детектирования шума, из которых по меньшей мере один расположен вне кабины, а по меньшей мере один – внутри кабины и/или внутри ее двойной стенки. В качестве альтернативы или дополнительно предусмотрены несколько противошумовых генераторов, из которых по меньшей мере один расположен вне кабины, а по меньшей мере один – внутри кабины и/или внутри ее двойной стенки.
Далее пост управления может содержать стеклоочистительное устройство по меньшей мере с одним стеклоочистителем для очистки остекления кабины, причем зона очистки стеклоочистителем может переменно устанавливаться в зависимости от по меньшей мере одного эксплуатационного параметра поста управления и/или управляемой с поста управления машины.
Предпочтительно может быть предусмотрено устройство детектирования сопротивления и/или препятствия очистке, причем зона очистки стеклоочистителем в зависимости от выявленного сопротивления и/или препятствия очистке ограничивается зоной очистки, в которой выявленное сопротивление очистке остается ниже заданного предельного значения и/или вне препятствия очистке.
В качестве альтернативы или дополнительно может быть предусмотрено приподнимающее устройство для приподнятия стеклоочистителя от очищаемого остекления, выполненное с возможностью управления в зависимости от сигнала детектирующего устройства таким образом, что стеклоочиститель приподнимается над выявленным препятствием очистке и/или зоной очистки, в которой выявленное сопротивление очистке превышает заданное предельное значение.
Согласно другому аспекту, предусмотрено детектирующее устройство для определения положения головы и/или направления взгляда водителя машины и/или устройство детектирования положения грузозахватного средства и/или положения груза, причем зона очистки стеклоочистителем в зависимости от выявленного направления взгляда и/или положения головы водителя машины и/или в зависимости от выявленного положения грузозахватного средства и/или положения груза может автоматически устанавливаться таким образом, что зона очистки стеклоочистителем смещается вместе с полем зрения водителя машины.
Для управления или установления поля очистки стеклоочиститель может содержать также регулируемый по длине рычаг с соответствующим исполнительным органом для регулирования длины и/или привод стеклоочистителя может иметь регулируемый диапазон перемещения.
Согласно другому аспекту, пост управления может содержать осветительное устройство для его освещения, которое может включать в себя несколько светильников для освещения различных зон освещения, которые выполнены с возможностью переменной настройки в отношении цвета освещения и/или силы света независимо друг от друга, чтобы создавать в различных зонах освещения различные цвета освещения и/или силы света.
Преимущественно далее предусмотрены устройство контроля возможных столкновений и устройство управления светом для изменения цвета освещения и/или силы света в обращенной к месту возможного столкновения зоне движения в зависимости от сигнала устройства контроля столкновений.
В качестве альтернативы или дополнительно предусмотрен по меньшей мере один датчик яркости для детектирования яркости на посту управления, причем в зависимости от сигнала яркости датчика яркости происходит переменная настройка цвета освещения и/или силы света.
Далее кран или управляемая с поста управления машина включает в себя осветительное устройство для освещения рабочей зоны, причем предусмотрены преимущественно несколько светильников для освещения различных зон освещения, причем светильники выполнены с возможностью индивидуального управления в отношении цвета освещения и/или силы света, чтобы создавать в различных зонах освещения различные цвета освещения и/или силы света.
По меньшей мере один из светильников может быть выполнен с возможностью изменения своей ориентации, причем может быть предусмотрено устройство управления ориентацией этого по меньшей мере одного светильника в зависимости от положения грузозахватного средства и/или положения груза с возможностью смещения созданной светильником зоны освещения автоматически вместе с грузозахватным средством и/или грузом.
По меньшей мере один светильник может быть выполнен изменяемым в отношении положения, и/или величины, и/или контура освещаемой им зоны освещения и с возможностью автоматического управления устройством управления в зависимости от текущего или запланированного пути перемещения грузозахватного средства таким образом, чтобы создаваемая светильником зона освещения отмечала и/или освещала путь перемещения грузозахватного средства.
Изобретение более подробно поясняется ниже на предпочтительном примере его осуществления со ссылкой на чертежи, на которых изображают:
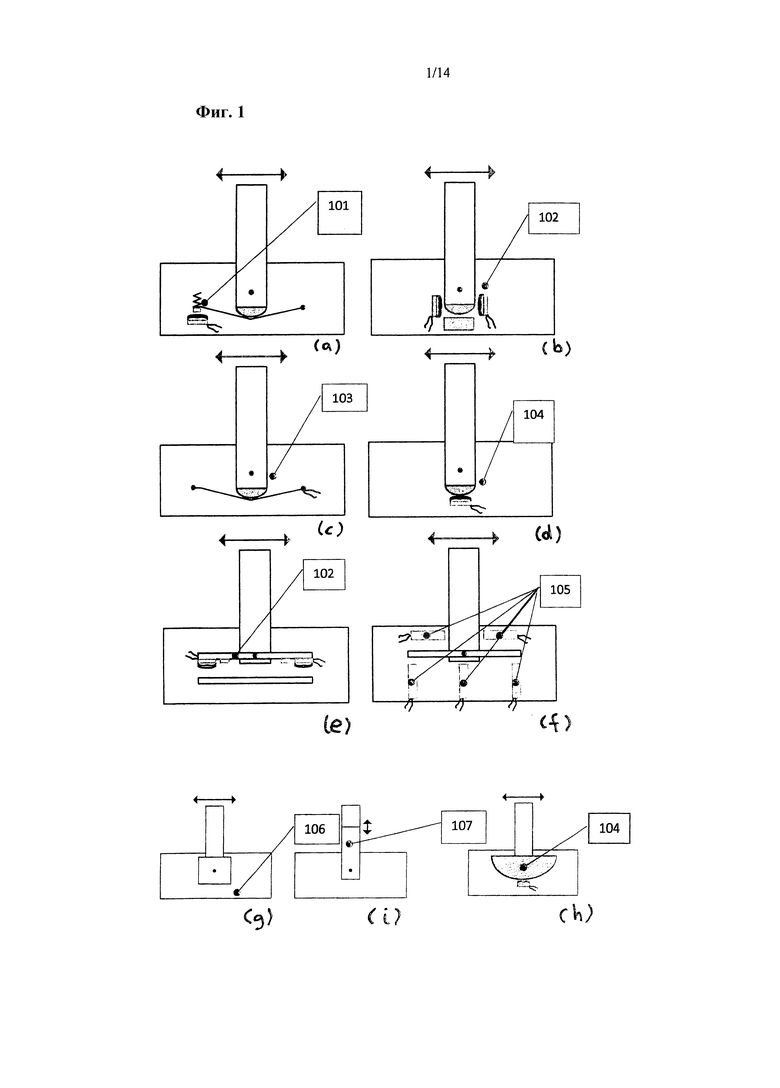
фиг. 1: схематично рычаг управления поста управления крана, причем отдельные виды (а)-(h) представляют различные опции возвратного устройства для возврата рычага управления и сенсорики для регистрации движений и/или исполнительных усилий и моментов рычага управления, а отдельный вид (i) представляет регулировочное устройство для регулирования длины рычага;
фиг. 2: схематично зону захвата пальцами рычага управления поста управления и размещенных на его поверхности элементов управления, выполненных с возможностью персонализированного конфигурирования;
фиг. 3: схематично зону захвата пальцами рычага управления поста управления, на поверхности которого расположен трехмерный сенсорный экран с сенсорной поверхностью;
фиг. 4: схематично размещенный вокруг подлокотника кресла поста управления трехмерный сенсорный экран, выполненный с возможностью индивидуального конфигурирования в отношении своих элементов отображения и управления, а также их функции и положения;
фиг. 5: схематично сенсорный экран, образующий поверхности подлокотника кресла поста управления;
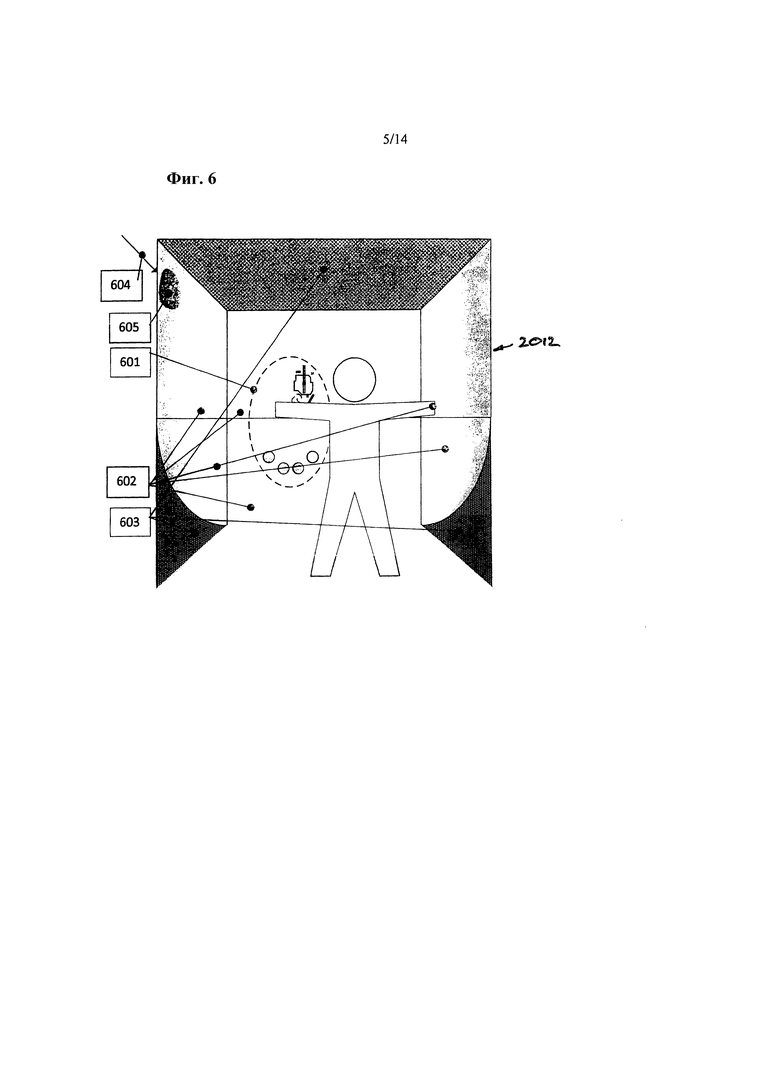
фиг. 6: схематично поверхность визуализации и управления большой площади, реализованную на стенке и/или остеклении кабины поста управления;
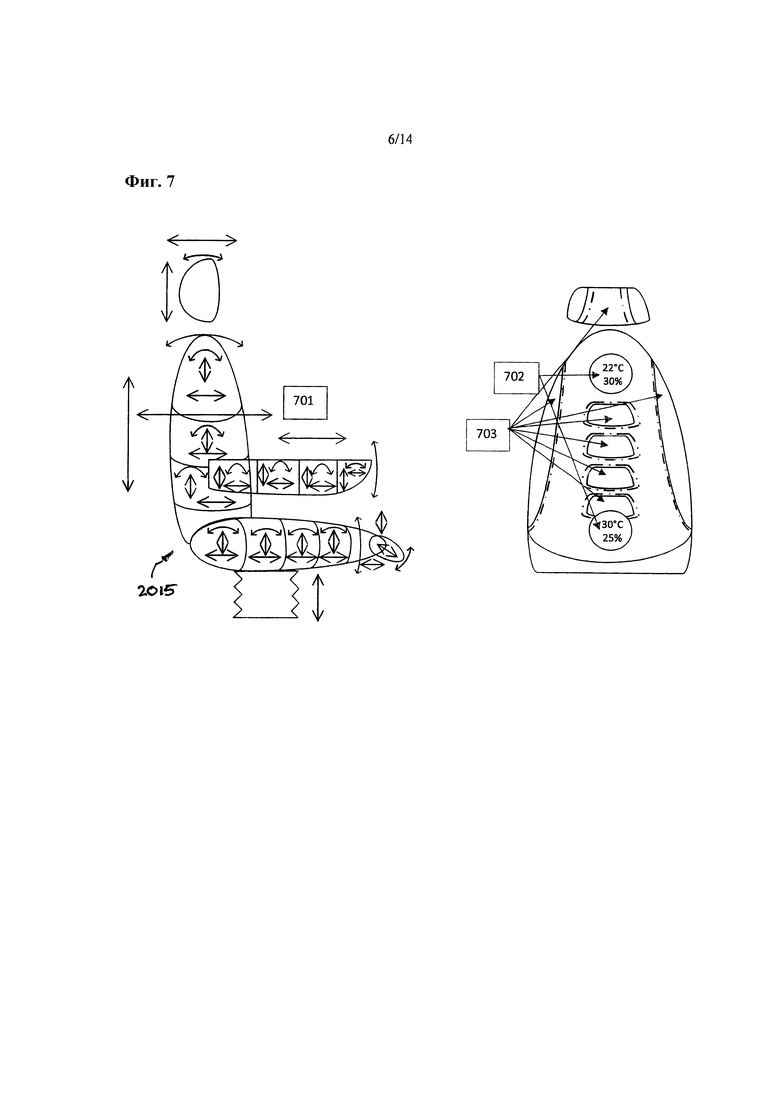
фиг. 7: схематично кресло поста управления с разделением на различные зоны и возможностями их регулирования;
фиг. 8: схематично кресло из фиг. 7 при виде сбоку, причем показаны возможность его наклона и соответствующее регулирование удерживающей скобы или ремня безопасности;
фиг. 9: схематично поверхности управления для индивидуальной настройки установки кондиционирования и ее климатические зоны;
фиг. 10: схематично коммутационную систему поста управления для связи с третьими лицами и их визуализации на устройстве отображения поста управления;
фиг. 11: схематично противошумовую систему поста управления для уменьшения окружающих шумов, причем изображены регистрирующий окружающие шумы микрофон и генерирующий противошум динамик;
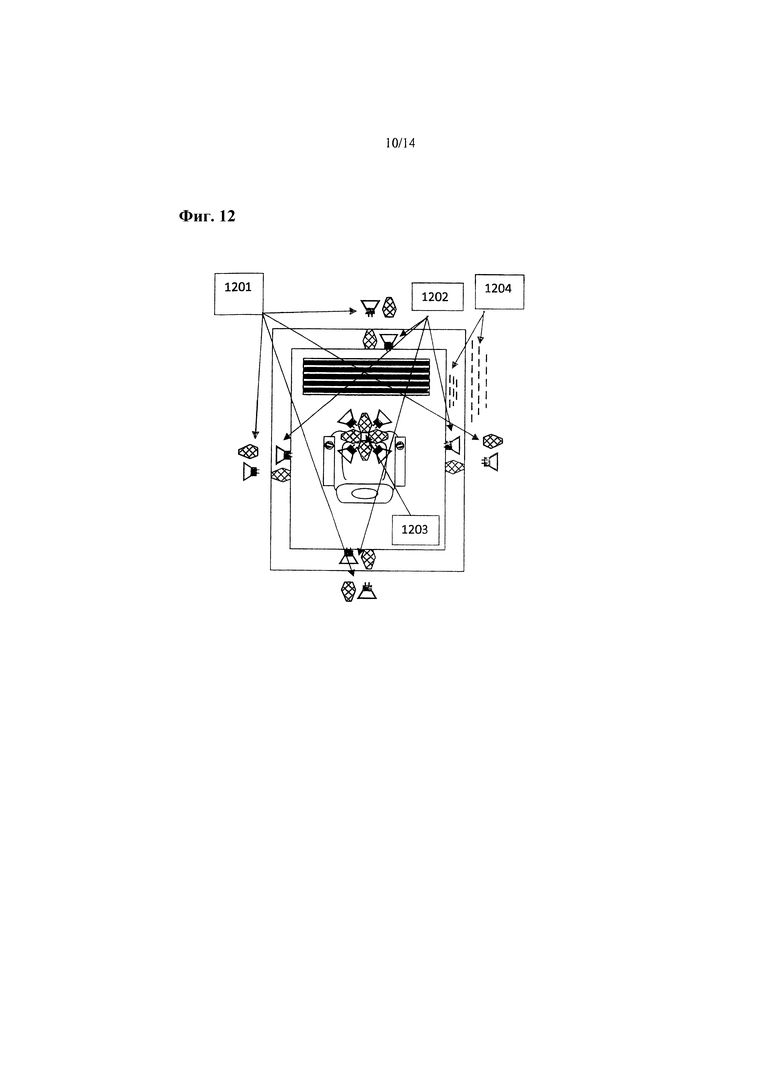
фиг. 12: схематично расположение компонентов противошумовой системы из фиг. 11 в разных местах поста управления и стенках ее кабины;
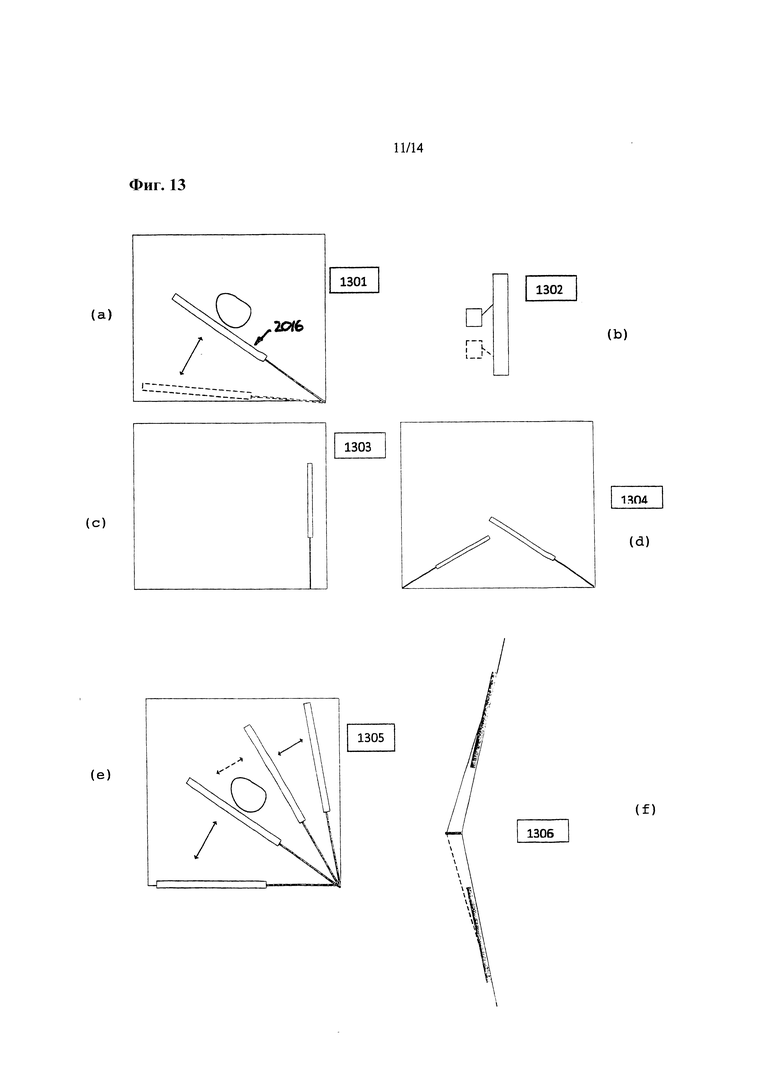
фиг. 13: схематично стеклоочистительную систему поста управления из предыдущих фигур, причем различные отдельные виды представляют коллизионную схему стеклоочистителя, попеременно различные исходные положения стеклоочистителя, сервисное положение стеклоочистителя, взаимодействие нескольких стеклоочистителей, автоматическое приподнятие стеклоочистителя при столкновениях, расположение общего привода для двух стеклоочистителей в зонах стекла с разным наклоном, возможность изменения длины рычага стеклоочистителя, возможность горизонтального перемещения стеклоочистителя и возможность вертикального перемещения;
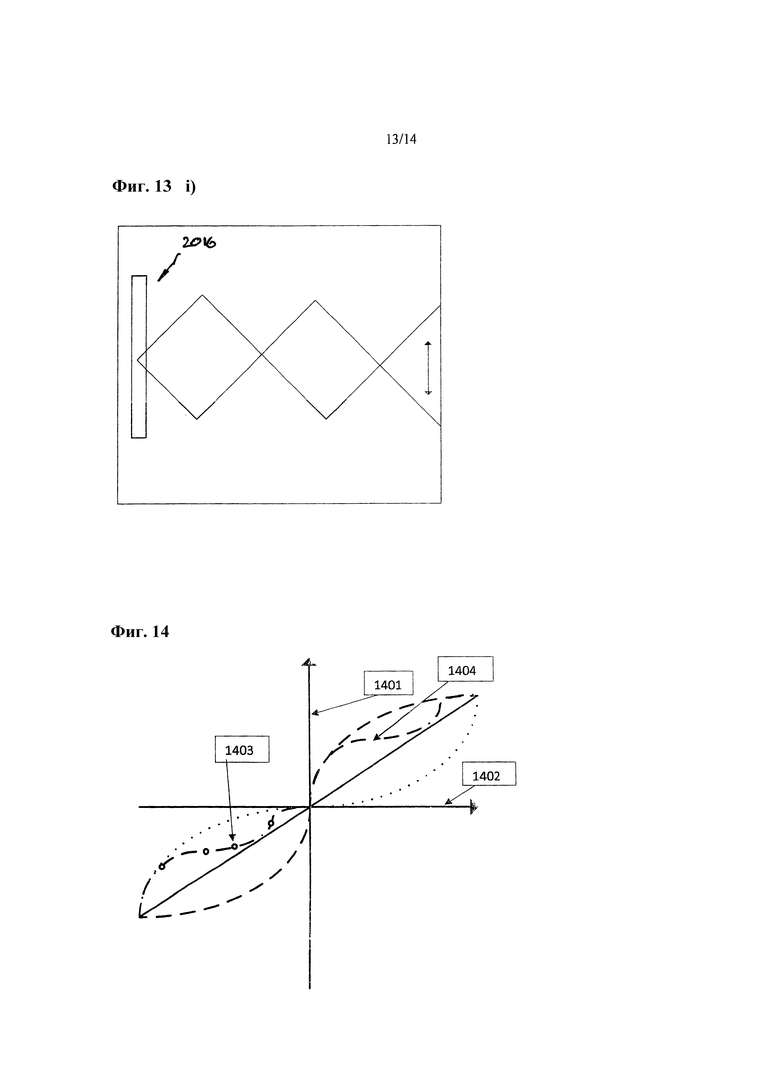
фиг. 14: схематично кривую характеристики заданного значения рычага управления и возможности ее ввода для адаптации кривой к водителю машины;
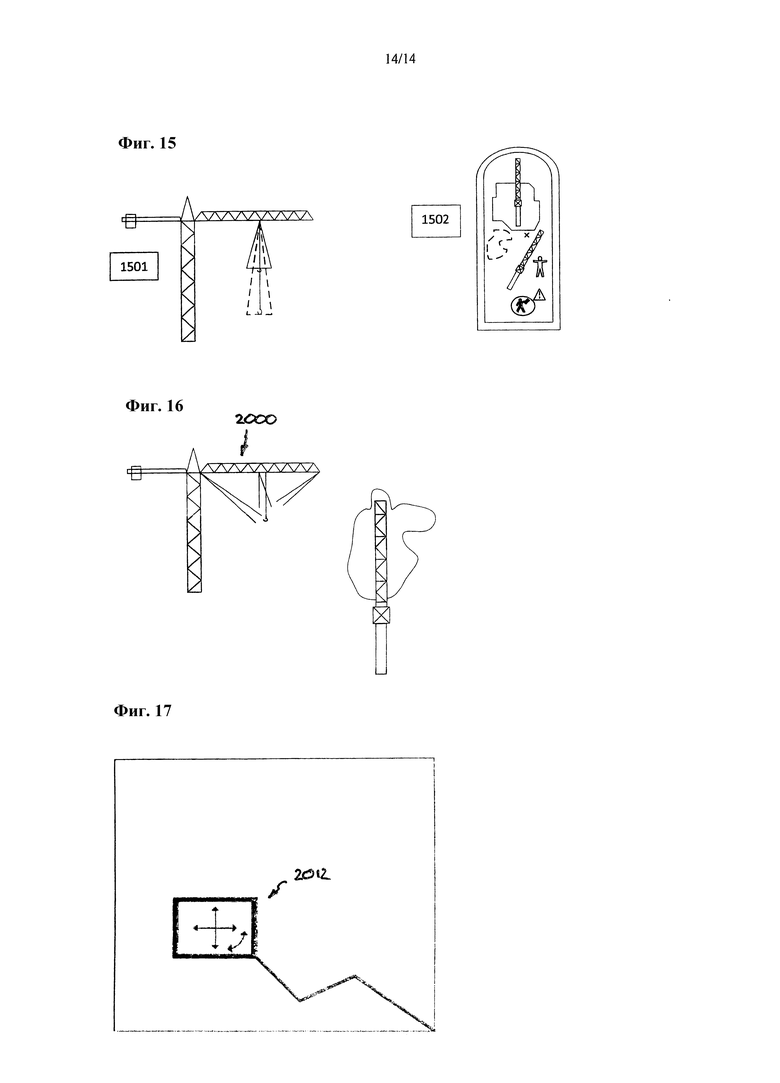
фиг. 15: схематично систему камеры крана и отфильтрованные из изображения камеры объекты и их отображение на дисплее поста управления;
фиг. 16: схематично осветительное устройство крана и возможность его настройки для освещения нужного пространства вокруг крана;
фиг. 17: схематично устройство отображения, положение которого относительно кресла поста управления динамически регулируется во время эксплуатации управляемой машины.
На подробно поясняемом ниже со ссылкой на чертежи посту управления предусмотрены различные новшества, и он может быть расположен, в частности, в виде кабины крановщика на кране, например на башне или поворотной вершине башенного поворотного крана. При необходимости, пост управления может использоваться также в виде отдельного от крана поста дистанционного управления или в виде поста управления для иной строительной машины или иного транспортера, например бульдозера, экскаватора, тросового экскаватора, фрезерного комбайна для открытых горных работ, самосвала или аналогичных машин.
Как видно на фиг. 1, рычаги управления поста управления могут иметь возвратный механизм, чтобы в не приведенном в действие состоянии автоматически попадать в нейтральное положение. Чтобы адаптировать индивидуально к оператору или же к возникшей ситуации чувство ответного давления, создаваемого возвратным механизмом, последний может быть реализован через комбинацию усилия пружины и электромагнита (фиг. 1, поз. 101), неподвижного магнита и электромагнита (фиг. 1, поз. 102), электрически деформируемый материал (фиг. 1, поз. 103), только через электромагнит (фиг. 1, поз. 104) или закрепленный на оси вращения контролируемый по положению и моменту электропривод с пружинным или магнитным возвратом (фиг. 1, поз. 106).
При этом момент может быть произвольно конфигурирован и персонализированно адаптирован к соответствующей операции управления, например таким образом, чтобы для низких скоростей предусмотреть более высокое ответное давление, а также может быть реализована произвольно конфигурируемая персонализированная фиксация, когда, будучи обусловлен положением, момент повышается или уменьшается. Точно так же ощутимо задаются движения перемещения, чтобы ощутимо сообщить, например, оператору определенные положения джойстика из систем поддержки, а также с помощью интегрированного в рычаг управления дисплея и светодиодного индикатора. При этом они могут быть также персонализированно конфигурированы.
Приложенный момент может определяться расчетным путем или посредством измерительной техники с помощью тензорезисторов, сенсорного поля или сенсорного экрана, датчиков магнитных полей или емкостным путем, чтобы с помощью регулирования компенсировать возмущающие воздействия. Электрически изменяемое магнитное поле может использоваться также для определения положения джойстика. При этом датчик магнитного поля регистрирует электрически изменяемое магнитное поле, в результате чего определяется положение. За счет этого может отпасть необходимость в неподвижном магните.
Другая опция предусматривает определение положения с помощью индуктивного и емкостного датчиков (фиг. 1, поз. 105). Длина рычага управления может персонализированно регулироваться с помощью электропривода, например в виде шпиндельного привода, или механически, например за счет фиксации и/или зажимного соединения (фиг. 1, поз. 107). Благодаря этому любой оператор может настроить нужную длину и сохранить эту настройку персонализированно в устройстве управления крана.
Рычаг управления (фиг. 2, поз. 201) поста управления содержит произвольно конфигурируемые элементы управления (фиг. 2, поз. 202), например джойстики, кнопки, колёса прокрутки, которые могут быть персонализированно конфигурированы. Таким образом, у крановщика возникает возможность присвоить все функции по управлению и настройке крана, оборудования, кабины, дисплея, поста управления и программ управления стройплощадкой наиболее подходящим для него элементам управления.
В другой опции предусмотрен эргономически гаптический сенсорный 3D-дисплей с сенсорной поверхностью (фиг. 3, поз. 302) преимущественно на всей поверхности рычага управления (фиг. 3, поз. 301). Она регистрирует, например с помощью радиолокационной техники, оптическим, емкостным, резистивным, акустическим путем и/или посредством измеряемых электрическим путем изменений, отпечаток пальца, а также движение и/или нажим приложенных пальцев и руки (фиг. 3, поз. 303). Это обеспечивает персонализированное присвоение всех функций по управлению и настройке крана, оборудования, кабины, дисплея, поста управления и программ управления стройплощадкой движению и/или нажиму определенных пальцев.
Благодаря этому без поиска определенных элементов управления можно выполнять персонализированно определенные управляющие команды. Точно так же регистрация может использоваться и для реализации функции безопасности. Можно индивидуально персонализированно определить, какая область руки должна регистрироваться, чтобы реализовать функцию безопасности.
За счет визуализации на рычаге управления может отображаться информация, а также могут подсвечиваться, сохраняться или обрамляться или иным образом отмечаться активные пальцы, выполняющие какую-либо функцию.
Поверхностная структура такого или иного дисплея также может преимущественно персонализированно электрически изменяться, чтобы сделать элементы управления ощутимыми, например путем создания вибраций или даже звука. Это позволяет передать оператору восприятие элементов управления, опасностей, структуры и информации о точечных или поверхностных вибрациях или шумах.
Точно так же могут регистрироваться жесты и положения, чтобы выполнять персонализированно определенные функции по управлению и настройке крана, оборудования, кабины, дисплея, поста управления и программ управления стройплощадкой. Необходимая и персонализированная информация вследствие регистрации руки высвечивается в свободных местах, чтобы обеспечить лучший обзор.
Положения элементов отображения и персонализированная информация выполнены предпочтительно динамическими и изменяют свое положение при движении руки и/или рычага управления, чтобы быть всегда видимыми оператору. Дополнительная анимация может предоставлять в распоряжение другую необходимую информацию, например управление рычагом управления или управляемой системой.
Эргономически расположенный вокруг подлокотника (фиг. 4, поз. 401) гаптический сенсорный 3D-дисплей (фиг. 4, поз. 402) обеспечивает индивидуальную персонализированную визуализацию элементов управления и отображения, а также необходимую персонализированную информацию (фиг. 4, поз. 404). Этим можно достичь оптимальной досягаемости и видимости элементов управления и отображения, а также необходимой персонализированной информации.
Элементам управления могут быть присвоены индивидуальные персонализированные функции по управлению и настройке крана, оборудования, кабины, дисплея, поста управления, а также программ управления стройплощадкой и/или других функциональных модулей. Положения элементов управления и отображения, а также персонализированная информация предпочтительно динамические и могут адаптироваться, например, к движению рычага управления (фиг. 4, поз. 403). Изменения положений могут быть также персонализированно конфигурированы. Это обеспечивает очень хорошую досягаемость всех элементов управления в любом положении рычага управления.
Предпочтительно вся поверхность дисплея может быть в распоряжении для движения элементов управления и отображения (фиг. 4, поз. 405).
На этом или ином дисплее, при необходимости, может отображаться вся стройплощадка с управляемым устройством, в виде, в частности, строительного крана или других строительных машин, таких как экскаватор, бульдозер и т.д., а также могут отмечаться или иным образом выделяться необходимые ситуации. При этом для оператора при персонализированной необходимости могут отображаться предпочтительно разные положения камер и/или анимация. Это упрощает восприятие информации, опасностей, структур и элементов управления без необходимости непосредственно смотреть на дисплей.
Например, автономно перемещаемому или управляемому крану могут задаваться нужные целевые положения (фиг. 5, поз. 504), например в виде локальных точек захвата и опускания груза и/или нужного пути горизонтального и/или вертикального перемещения (фиг. 5, поз. 506). При этом цели захвата и опускания груза, а также пути перемещения могут быть отображены в соответствии с приоритетом или анимированы после поступления задания. Различные формы и цвета, а также динамическая нумерация с числами и/или буквами могут использоваться для индивидуального персонализированного отображения. За счет этого в упрощенном виде отображаются приоритеты необходимых рабочих заданий. Нужные задания может передавать на систему управления персонал стройплощадки или ответственные за стройплощадку лица через радио- или кабельное соединение. За счет этого на дисплее могут отображаться также задания для нескольких кранов.
Существует также возможность управления через радио- или кабельное соединение другим устройством, благодаря чему крановщик может управлять несколькими устройствами. Также могут отображаться огороженные зоны для грузового крюка (фиг. 5, поз. 505), благодаря чему сразу видно, какой путь должен пройти кран. Также могут регистрироваться жесты и положения для выполнения определенных функций по управлению и настройке крана, оборудования, кабины, дисплея, поста управления и программ управления стройплощадкой.
Также здесь может быть предусмотрена специальная сенсорная поверхность, служащая для регистрации отпечатка пальца и движения и/или нажима. За счет этого можно присвоить отдельным пальцам также персонализированно конфигурированные функции управления. В качестве альтернативы или дополнительно могут регистрироваться также жесты и положения для выполнения определенных функций. Например, элементы управления могут высвечиваться в незакрытых местах только при приближении пальцев к дисплею, чтобы обеспечить лучший обзор или упрощенное переключение изображений.
Поверхностная структура дисплея может персонализированно изменяться предпочтительно электрически, чтобы сделать элементы управления восприимчивыми и создать вибрации или даже звук. Это позволяет передать оператору тактильное восприятие элементов управления, опасностей, структуры и информации о точечных или поверхностных вибрациях или шумах. Необходимая и персонализированная информация вследствие регистрации руки и направления взгляда оператора посредством датчиков положения, что может происходить, например, оптическим путем, с помощью радиолокационной техники, емкостным, индуктивным путем и/или посредством одной или нескольких камер, может высвечиваться в свободных, видимых, персонализированно конфигурируемых местах, чтобы обеспечить лучший обзор. Положения элементов отображения и персонализированная информация предпочтительно изменяются во времени и изменяют свое положение при движении руки и/или головы, чтобы быть всегда видимыми оператору.
В другой опции на верхней стороне подлокотника (фиг. 5, поз. 501) расположен эргономически гаптический сенсорный 3D-дисплей с сенсорной поверхностью (фиг. 5, поз. 502), причем может отпасть необходимость в рычаге управления. На этом дисплее может отображаться вся стройплощадка с управляемым устройством, в частности строительным краном и, при необходимости, другими строительными машинами, такими как экскаватор, бульдозер и т.д., а также могут отмечаться или иным образом выделяться необходимые ситуации. При этом для оператора преимущественно при персонализированной необходимости могут отображаться разные положения камер и/или анимация.
Необходимая информация может ощутимо выделяться. Это упрощает восприятие информации, опасностей, структур и элементов управления без необходимости непосредственно смотреть на дисплей. Автономному крану могут задаваться нужные целевые положения (фиг. 5, поз. 504) (например, захват и опускание груза), а также нужный путь горизонтального и/или вертикального перемещения (фиг. 5, поз. 506). Цели и пути перемещения могут быть отображены в соответствии с приоритетом или анимированы после поступления задания. Различные формы и цвета, а также динамическая нумерация с числами и/или буквами могут использоваться для индивидуального персонализированного отображения. За счет этого в упрощенном виде отображаются приоритеты необходимых рабочих заданий. Нужные задания может передавать на систему управления персонал стройплощадки или ответственные за стройплощадку лица через радио- или кабельное соединение. При этом на дисплее могут отображаться также задания для нескольких кранов.
Существует также возможность управления через радио- или кабельное соединение другим устройством, благодаря чему крановщик может управлять несколькими устройствами. Также могут отображаться огороженные зоны для грузового крюка (фиг. 5, поз. 505), благодаря чему сразу видно, какой путь должен пройти кран.
Также могут регистрироваться жесты и положения для выполнения определенных функций по управлению и настройке крана, оборудования, кабины, дисплея, поста управления и программ управления стройплощадкой.
Предпочтительно элементы управления высвечиваются на дисплее только при приближении пальцев, чтобы обеспечить лучший обзор.
Функции по управлению и настройке крана, оборудования, кабины, дисплея, поста управления и программ управления стройплощадкой могут быть выполнены также непосредственно с помощью элементов управления (фиг. 5, поз. 508) или изображенного перекрестия или других символов управления (фиг. 5, поз. 507). С помощью звука и вибраций команды на движение могут сохраняться, чтобы стать ощутимыми оператору, благодаря чему определяются несколько чувств для восприятия.
Необходимая и персонализированная информация вследствие регистрации руки и/или направления взгляда оператора посредством датчиков положения, что может происходить, например, оптическим путем, с помощью радиолокационной техники, емкостным, индуктивным путем и/или посредством одной или нескольких камер, может высвечиваться в свободных, видимых, персонализированных местах, чтобы обеспечить лучший обзор. При этом положения элементов отображения и персонализированная информация предпочтительно динамические и могут изменять свое положение при движении руки и головы, чтобы быть всегда видимыми оператору.
Чтобы обеспечить визуализацию на большой площади, в рабочей зоне могут быть расположены также другие дисплеи с такими же или аналогичными или другими свойствами.
В другой опции предусмотрена имеющая большую площадь, преимущественно произвольно конфигурируемая персонализированная 3D-поверхность визуализации и управления, которая может быть реализована, например, посредством интегрированных в остекление кабины (фиг. 6, поз. 601) и/или облицовку (фиг. 6, поз. 602) 3D-дисплеев, например на основе OLED-технологии с прозрачным фоном или без него, и/или посредством проектируемой 3D-визуализации, такой как надголовные дисплеи, и/или посредством смарт-очков. При этом поверхность управления может быть реализована посредством эргономической гаптической сенсорной поверхности или управления жестами всего тела. Это обеспечивает визуализацию и управление непосредственно в поле зрения оператора (фиг. 6, поз. 603).
При этом необходимая и персонализированная информация, а также элементы управления могут всегда отображаться даже при изменении положения поля зрения. Мешающие в поле зрения компоненты, например стрела, могут закрываться находящимся позади фоновым изображением камеры, чтобы обеспечить также вид за мешающим компонентом. Таким образом, мешающий компонент становится невидимым.
В качестве альтернативы или дополнительно также падающий солнечный свет (фиг. 6, поз. 604) с помощью дисплейной технологии может затеняться точечно или местами и преимущественно персонализированно с возможностью конфигурирования (фиг. 6, поз. 605). Это может быть реализовано также посредством электрически персонализированно изменяемого стекла или пленки. Уже описанные в отношении представленных дисплеев концепции управления и отображения могут быть реализованы также с этим выполнением устройства отображения.
Все или некоторые размещенные в кабине дисплеи могут предпочтительно адаптировать к окружающему пространству свои яркость и громкость. Яркость и/или громкость могут определяться датчиками на посту управления, в помещении, на кране и/или в дисплее, так что дисплеи могут быть адаптированы к окружающему пространству, чтобы обеспечить не мешающую визуализацию.
При этом возможны различные комбинации датчиков и дисплеев или устройств отображения. Все находящиеся в кабине и на кране датчики, приводы, проекторы, дисплеи могут выступать также в различных сочетаниях и, иначе, чем, описано, как комбинированное устройство, например в виде дисплея с датчиками яркости, дождя и света с надголовным проектором.
Как видно на фиг. 17, все или некоторые из размещенных в кабине дисплеев могут располагать GPS-датчиком, компасным датчиком и/или гироскопическим датчиком или управляться в зависимости от их сигналов. За счет этого возникает возможность адаптации изображения на дисплее к нужному горизонтальному и вертикальному расположениям дисплея. Последний может быть произвольно позиционирован в пространстве посредством многошарнирной консоли или линейного блока с контролируемыми по положению приводами (фиг. 17). При этом позиционирование может осуществляться от руки, а также посредством 3D-элементов управления. Во всех случаях расположение может персонализированно сохраняться, причем настройки могут автоматически сохраняться. Точно так же дисплей может ориентироваться в пространстве в зависимости от движения головы, которое может регистрироваться посредством изображения камеры или датчиков движения. Изображение камеры на дисплее может ориентироваться также по направлению компаса, чтобы всегда отображать нужные положение и направление камеры.
Кресло 2015 оператора и весь пульт управления предпочтительно оборудованы электро- и/или пневмоприводами, чтобы обеспечить персонализированно конфигурируемую регулировку кресла. Управление приводами может осуществляться через шинную систему и по радио.
Кресло 2015 может быть разделено на несколько элементов (фиг. 7, поз. 701), которые могут регулироваться по отдельности. С помощью нагревательных, охлаждающих и/или вентиляционных элементов в отдельных элементах можно путем ввода жестов и речи задавать различные климатические зоны по положению, величине и контуру (фиг. 8, поз. 802). Настройки персонализированно сохраняются и могут вызываться путем указания даты и времени, чтобы обеспечить наилучшую разгрузку отдельных участков тела.
Кресло может располагать также функцией массажа, при которой отдельные элементы выполняют движения (фиг. 7, поз. 702), чтобы расслабить часть мышц, предупредить за счет этого телесные повреждения из-за длительного сидения и повысить концентрацию внимания.
Кресло предпочтительно автоматически или полуавтоматически приспосабливается к телосложению оператора. Оно может определяться датчиками давления в сиденье и/или оптическим путем посредством системы камер.
Весь пост управления и/или его кресло по положению и ориентации предпочтительно самопроизвольно приспосабливается к нужному полю зрения оператора, чтобы обеспечить удобное положение обзора. При этом направление взгляда может определяться датчиками движения и/или оптическим путем посредством системы камер. В качестве альтернативы или дополнительно направление взгляда может определяться также расчетным путем по положению груза или грузозахватного средства.
Если необходим наклон кресла, то электрически могут выдвигаться удерживающие скобы (фиг. 8, поз. 801), а свободно сидящие удерживающие ремни могут натягиваться за счет регулирования кресла (фиг. 8, поз. 802) и/или электрически (фиг. 8, поз. 803). За счет ненужности натянутых удерживающих ремней или скоб обеспечивается больший комфорт сидения, а автоматизация позволяет избавиться от отнимающего много времени и связанного с ошибками пристегивания ремнями.
В качестве альтернативы или дополнительно кресло 2015 может содержать также электрическое, гидравлическое и/или пневматическое устройство вращения. Обусловленное ситуацией или вращение кресла 2015 вручную позволяет легче сесть в него и увеличивает поле зрения. Кресло может электрически, пневматически и/или гидравлически регулироваться также по высоте. Благодаря этому можно персонализированно обеспечить оптимальную высоту кресла и такое его положение, чтобы можно было легче сесть в него.
Чтобы обеспечить водителю машины оптимальные температуру, качество воздуха и/или влажность воздуха в кабине крана или на посту управления, эти эксплуатационные параметры или по меньшей мере отдельные из них можно задавать с помощью речевых и/или жестовых и/или сенсорных команд на дисплеях и/или других устройствах управления и управлять ими или регулировать их посредством установки кондиционирования.
При этом регулирование может осуществляться за счет определения с помощью нескольких размещенных в кабине датчиков температуры, влажности и/или качества воздуха (фиг. 9, поз. 903) и/или одной или нескольких тепловизионных камер, причем могут задаваться и настраиваться по положению, величине и/или контуру несколько климатических зон (фиг. 9, поз. 902).
Предпочтительно можно компенсировать также инсоляцию (фиг. 9, поз. 904). Инсоляция может определяться датчиками яркости в кабине крана и/или вне нее.
Также существует возможность задавать направление воздушных потоков и/или несколько климатических зон с помощью речевых и/или жестовых и/или сенсорных команд на дисплеях и/или других устройствах управления (фиг. 9, поз. 901).
Регулирование свежего воздуха и содержания кислорода может осуществляться вручную и автоматически. Охлаждение и нагрев кабины могут осуществляться с помощью воздуха и жидкостных, газовых или электроклиматических компонентов в боковых стенках, потолке и полу.
Кабина крана или пост управления располагает далее речевой, аудио- и коммуникационной системой, которая может состоять из комбинации нескольких устройств или в виде комплексного устройства. При этом речевой, аудио- и коммуникационной системой можно управлять предпочтительно с помощью центральных дисплеев или датчиков в кабине крана посредством речевых и/или жестовых и/или сенсорных команд на дисплеях и/или других устройствах управления.
Предпочтительно с помощью подходящих средств коммуникации через радио- или кабельное соединение можно стримовать также адреса и данные. Текстовая и речевая коммуникация может осуществляться посредством речевых, жестовых и сенсорных команд на дисплеях и устройствах управления.
Отображенная на интегрированных дисплеях стройплощадка предпочтительно на основе аутентификации посредством GPS и/или камеры оптически выделяет лиц (фиг. 10, поз. 1001), с которыми посредством речевых и/или жестовых и/или сенсорных команд на дисплеях и устройствах управления через радио- или кабельное соединение может осуществляться текстовая и речевая коммуникация.
Если кран совершает автономное или инициированное оператором движение (фиг. 10, поз. 1003), то кран может автоматически, или оператор может послать текстовое и/или речевое сообщение или иное сообщение, например в виде вибрации, с передающего устройства соответствующим лицам на стройплощадке (фиг. 10, поз. 1004), когда они находятся в текущей или будущей опасной зоне движения груза и перемещения (фиг. 10, поз. 1002).
Персонализированные функции кабины и перемещения могут выполняться также голосом.
Сообщения и необходимая или полезная информация (например, статус крана, сообщения от устройства управления крана, текущая метеосводка и т.п.) может персонализированно запрашиваться с помощью речевого ввода. Информация и коммуникация сообщаются крановщику преимущественно в виде звука или графического изображения. Коммуникационная система предоставляет далее в распоряжение преимущественно радо- и/или кабельный интерфейс для вышестоящей системы управления (например, BIM – информационное моделирование зданий) и, при необходимости, также для публичного интернета.
Пост управления располагает далее предпочтительно системой экстренного вызова и/или предупреждения, которая может иметь преимущественно кнопку экстренного вызова, обеспечивающую связь через радио- или кабельное соединение, например, с диспетчерской экстренного вызова, прокатом крана и/или диспетчерской безопасности стройплощадки. При нажатии кнопки экстренного вызова может автоматически передаваться речевое сообщение, в котором сообщается о состоянии крана, например положении, конструкции, готовности подъемника, а также возможности запроса или управления системами камер. Точно так же существует возможность того, чтобы пострадавший сам мог связаться с соответствующими лицами.
Экстренный вызов может направляться также автоматически персонализированно определенным лицам, например, когда кран имеет определенную неисправность или находится в критической ситуации. Сообщения могут передаваться в окружающее пространство также через указательные приборы и динамики. Система может передавать также произвольно определяемые изображения камер, необходимые для первых оценок происшествия.
Если для крана имеется критический метеопрогноз, то произвольно определяемые лица информируются для безопасности о состоянии и требуемых мерах. При этом метеоданные передаются через радио- или кабельное соединение от метеослужбы или метеостанций на другие краны.
Предпочтительно на посту управления может быть предусмотрено снижение окружающих шумов через противошум. Преимущественно пост управления располагает для этого противошумовой системой. При этом попадающий на кабину шум (фиг. 11, поз. 1101) воспринимается по меньшей мере одним микрофоном и компенсируется противошумом (фиг. 11, поз. 1102), который создается по меньшей мере одним динамиком.
Для оптимальной эффективности, смотря по ситуации, могут потребоваться разные положения микрофонов и динамиков. При этом микрофоны и динамики могут находиться вне кабины (фиг. 12, поз. 1201), в двойной стенке (фиг. 12, поз. 1202), внутри кабины (фиг. 12, поз. 1203) или в комбинации из нескольких таких расположений. Точно так же может отличаться и место установки микрофонов и динамиков.
В качестве динамиков могут использоваться также сами стенки кабины или остекления за счет того, что они, например электрически, точечно приводятся в вибрацию (фиг. 12, поз. 1204). Гаптическая поверхность остекления также может за счет вибрации создавать необходимый противошум.
Противошумовая установка позволяет компенсировать преимущественно персонализированно определенные шумы в персонализированно определенных зонах. Это разгружает крановщика от громких окружающих шумов, благодаря чему он может сконцентрировать внимание на релевантных предупредительных сигналах, которые компенсируются в зависимости от релевантности безопасности или персонализированной конфигурации.
Согласно другому аспекту, пост управления включает в себя стеклоочистительную систему, которая может содержать по меньшей мере один стеклоочиститель 2016 (фиг. 13).
В качестве привода стеклоочистителя может быть предусмотрен по меньшей мере один, преимущественно с шинным управлением двигатель, который может иметь отнесенное к положению обнаружение нагрузки, регулирование скорости и регистрацию положения. Предпочтительно можно контролировать также питающее напряжение по меньшей мере одного двигателя. За счет этих опций возникают новые возможности реализации щадящего стеклоочиститель движения.
Привод стеклоочистителя обнаруживает предпочтительно область перегрузки. При возникновении перегрузки стекла, например в результате загрязнения, привод стремится удалить загрязнение со стекла только с помощью неопасного для привода и механики момента или усилия. Если это невозможно, то стеклоочиститель 2016 очищает только незагрязненную зону (фиг. 13, поз. 1301), т.е. область очистки ограничивается не затронутой препятствием зоной или настраивается на зону, в которой достаточен или не превышается приемлемый для привода и механики момент. В качестве альтернативы или дополнительно может произойти отключение перегрузки, чтобы бережно обойтись с механикой и стеклоочистителями.
По окончании циклов очистки щетка стеклоочистителя предпочтительно изменяет исходное положение, чтобы избежать односторонней деформации стеклоочистителя из-за постоянного исходного положения (фиг. 13, поз. 1302).
Также в случае сервиса стеклоочиститель может перемещаться в удобное для сервиса положение (фиг. 13, поз. 1303).
На основе, например, регистрации угла и/или движения может с помощью алгоритма осуществляться электронное обнаружение столкновения с другими стеклоочистителями (фиг. 13, поз. 1304), благодаря чему может отпасть необходимость в дорогой и громоздкой механике.
Согласно другому аспекту, с помощью детектируемого камерами и/или датчиками направления взгляда крановщика можно рассчитать нужное поле зрения. В зависимости от определяемого таким образом и/или нужного поля зрения устройство управления стеклоочистителем может ограничить и/или адаптировать и/или динамически сместить поле очистки. Для этого устройство управления стеклоочистителем может определить также положение грузозахватного средства и/или груза и учесть для расчета поля очистки.
За счет этого очищается лишь минимальная, фактически требуемая или нужная зона стекла, благодаря чему обеспечиваются более быстрые циклы очистки вследствие более коротких путей.
Также возможен ручной, персонализированно конфигурируемый выбор зоны очистки.
Резервуар с водой для очистки предпочтительно снабжен средством обнаружения уровня, например датчиком уровня, чтобы сообщать крановщику о необходимости долива.
Стеклоочистительная установка располагает предпочтительно одним или несколькими датчиками дождя и/или света, которые, например, оптическим, емкостным путем и/или посредством измерения сопротивления регистрируют, загрязнено ли стекло. При этом оптически путем могут восприниматься также направления и яркость окружающих источников света.
При сухом загрязнении во время очистки стекла преимущественно автоматически активируется разбрызгиватель. Если речь идет о влажном загрязнении, то в дополнительном включении разбрызгивателя нет необходимости. Регистрация силы и направления инсоляции обеспечивает автоматические включение и регулирование систем освещения внутри и вне кабины крана, а также освещения стройплощадки. Также остекление может затеняться персонализированно электрически изменяемой пленкой или стеклом в зонах, сквозь которые светит солнце.
Это может осуществляться также неэлектрическим путем посредством светоизменяемого материала.
Датчик дождя дает огромное преимущество крановщику при движении крана. Если кран берет груз, а дождь идет сзади, стеклоочиститель работал бы всухую. В этом случае датчик обнаруживает, что на стекле нет или мало дождя, и уменьшает или останавливает движение стеклоочистителя. Если же кран поворачивается в сторону дождя, датчик обнаруживает дождь и запускает процесс очистки или повышает ее скорость.
Электро-, гидро- и/или пневмопривод с регистрацией положения на рычаге стеклоочистителя и на самом стеклоочистителе обеспечивает предпочтительно автоматическую постановку щетки стеклоочистителя. За счет этого щетка стеклоочистителя при низких температурах автоматически приподнимается от остекления, чтобы не примерзнуть. Также за счет приподнятия щетки стеклоочистителя можно избежать загрязненных зон, чью грязь нельзя удалить (фиг. 13, поз. 1305).
Существует также возможность очистки с одним приводом двух стекол с разным наклоном (фиг. 13, поз. 1306).
Сервопривод, преимущественно с контролем положения, который может быть выполнен электрическим, гидравлическим и/или пневматическим и придан рычагу стеклоочистителя, может предпочтительно изменять длину рычага стеклоочистителя, благодаря чему можно дополнительно адаптировать поле очистки (фиг. 13g).
При этом стеклоочистителю может быть придан привод вращения, который может быть выполнен электрическим, гидравлическим и/или пневматическим, чтобы можно было контролировать или адаптировать охватываемый стеклоочистителем угловой диапазон. Это позволяет реализовать с одним приводом вращения по меньшей мере приблизительно прямоугольное поле очистки (фиг. 13g).
Возможен также горизонтальный привод стеклоочистителя с управлением положением, который может перемещать стеклоочиститель горизонтально или вертикально, например, посредством линейного блока с контролем положения, приводимый в действие электрически, гидравлически и/или пневматически (фиг. 13h).
Согласно другому аспекту, предусмотрено освещение кабины, включающее в себя осветительные средства, которыми можно управлять посредством шинной системы или устройства управления с программируемым соединением. Осветительные средства могут изменяться предпочтительно по цвету и/или яркости. Благодаря этому возникают новые возможности использования их для коммуникации между строительной машиной и оператором.
Освещение может управляться или использоваться, в частности, для цветовой передачи информации (например, красный цвет: опасность, желтый цвет: предупреждение, зеленый цвет: машина работает).
Предпочтительно цвета и/или сила света могут индивидуально изменяться в различных зонах освещения, причем, в частности, управление может быть предусмотрено в зависимости от эксплуатационного параметра и/или окружающей ситуации. Например, свой цвет могут изменять только зоны в направлении опасности. Если, например, сзади слева от поста управления или от крана возникает предупреждение столкновения, то тогда в этой зоне может быть автоматически включен цвет освещения красный.
В качестве альтернативы или дополнительно существует также возможность реализации различных мигающих узоров разного или одинакового цвета и/или разной силы света.
Если снаружи кабины темнеет, то это может определяться датчиком яркости, причем по мере усиления темноты может быть повышена, например, яркость в кабине или на посту управления.
Все функции освещения могут конфигурироваться и персонализированно сохраняться в устройстве управления предпочтительно оператором. За счет этого в любом случае имеет место индивидуально предпочтительное или наиболее подходящее освещение кабины. С помощью алгоритма оценивается текущая ситуация со строительной машиной, и реализуется нужное в соответствии с этим освещение. Благодаря этому можно избежать ослеплений, отражений от остекления и сберечь зрение.
Электрически изменяемое остекление и/или фольга и/или изменяемый за счет яркости материал могут помочь избежать отражений, которые могут определяться, например, датчиком и/или системой камер. За счет адаптации остекления и/или пленки и/или изменяемого за счет яркости материала, что может происходить преимущественно автоматически в зависимости от сигналов датчика или камер и может включать в себя изменение поверхности, можно избежать таких отражений.
Точно так же за счет названного локального управления цветом и/или силой света можно выделить другими цветами в какой-либо ситуации определенные контрасты в восприятии кабины.
Предпочтительно пост управления включает в себя далее различные системы помощи.
Для обнаружения усталости можно, например, с помощью камеры и/или оптической сенсорики регистрировать реакции организма и/или поведения и персонализированно сравнивать с уже известными и записанными образцами и/или регистрировать характер движения и с помощью алгоритма персонализированно сравнивать зарегистрированный характер движения с уже известными и записанными образцами. При легких и средних отклонениях от эталонных образцов оператору указывается на его усталость, а при грубых отклонениях устройство управления крана может выполнять или блокировать команды движения во избежание аварий. Точно так же находящиеся в опасности лица могут предупреждаться через мобильное радиосоединение или оптическим путем – рабочими прожекторами.
Далее могут быть предусмотрены также системы помощи для экономичного и щадящего материалы режима работы. Например, пост управления может располагать в устройстве управления или на центральной платформе алгоритмом, который он запрашивает через кабельное или радиосоединение, который предлагает для каждой ситуации наиболее экономичный, наиболее быстрый или наиболее щадящий материалы режим работы и режим манипулирования также в отношении груза и наиболее надежные управляющие команды или же предлагает характеристики заданных значений для рычага управления.
Сообщение об этом может осуществляться, например, оптическим путем через дисплей или разноцветное освещение кабины и/или через повышение или снижение ответного момента на джойстике, что может происходить посредством электропривода, электрически изменяемых материалов и/или магнитов. Названное сообщение может быть персонализированно конфигурировано. За счет этого можно ощутимо навести оператора на оптимальную управляющую команду без необходимости смотреть на дисплей.
Переключение поведений может происходить также вручную, а системы помощи могут быть конфигурированы также персонализированно. Кривая заданного значения (фиг. 14, поз. 1401) джойстика в зависимости от амплитуды (фиг. 14, поз. 1402) может быть персонализированно конфигурирована также посредством ввода значения или точечного сдвига (фиг. 14, поз. 1403) или рисования (фиг. 14, поз. 1404) через сенсорные или речевые команды на дисплее или иным образом. За счет этого реакцию крана или соответственно управляемой машины можно адаптировать к оператору.
Далее предусмотрена предпочтительно система предотвращения столкновений. При этом существует возможность информировать другие краны о намеченном пути перемещения, чтобы заблаговременно избежать отключения вследствие предотвращения столкновения. Привязанная к заданию, основанная на программном обеспечении организация путей перемещения управляемых вручную и/или автономных кранов может предотвратить или по меньшей мере сократить время простоя вследствие стоящих на пути перемещения кранов. Организация может осуществляться в устройствах управления кранов или на центральной платформе.
Далее предусмотрена предпочтительно система менеджмента обслуживания. С помощью алгоритма, хранящегося в центральной системе управления или в устройстве управления крана, можно оценивать характер движения и/или рабочие ситуации. По ним можно настроить изменяющиеся интервалы обслуживания отдельных, а также нескольких компонентов. Срок и продолжительность могут постоянно запрашиваться плановиком, обслуживающим персоналом и оператором крана онлайн, а также через устройство управления крана. Точно так же в распоряжении имеются интерфейсы к вышестоящим системам управления (например, BIM).
Предпочтительно все или по меньшей мере некоторые персонализированно конфигурированные функции могут храниться и/или запрашиваться в устройстве управления крана или централизированно на онлайн-платформе через радио- и/или кабельное соединение. Аутентификация оператора осуществляется, например, с помощью электронного ключа, оптическим путем посредством системы камер, смартфонов и/или ввода отпечатка пальца через сканер отпечатка пальца и/или через сенсорный дисплей.
Посредством центрального онлайн-управления начальник может сообщить крану или оператору на коммуникационное средство рабочий план и перечень заданий. Пост управления осуществляет все персонализированные настройки (например, запуск системы, регулировки кресла, конфигурация рычага управления, микроклимат помещения) перед началом работы, чтобы оператор мог сразу же отработать перечень заданий, сообщенный устройству управления крана и/или на коммуникационное средство.
Точно так же существует возможность того, что оператор также через коммуникационное средство может отметить начало или конец работы на определенном устройстве с датой и временем, причем пост управления в зависимости от этого перед началом работы может осуществить все необходимые настройки. Подтверждение оператором может происходить посредством аутентификации, которая может осуществляться также для регистрации времени работы, причем она может тогда сообщаться также на портал.
Как видно на фиг. 15, кран 2000 может содержать систему камер, располагающую предпочтительно по меньшей мере одной моторной зум-камерой, которая может быть размещена на тележке стрелы, причем автоматически с глубиной утопления ее зум может быть дополнительно шкалирован (фиг. 15, поз. 1501). Точно так же кран 2000 может содержать предпочтительно несколько камер, которые обеспечивают обзор сверху на 360º устройства и стройплощадки.
Камеры системы камер могут далее обладать инфракрасно-тепловизионной функцией, которая подходит для ночного видения.
Точно так же посредством систем камер можно наблюдать за стройплощадкой. Например, могут регистрироваться и передаваться в диспетчерскую движения лиц. При этом персонал охраны отфильтровывается за счет аутентификации, например посредством камеры, GPS-датчика или определения местонахождения радиопередатчика или посредством коммуникационных средств (фиг. 15, поз. 1502).
Камера, которая может снимать также изображение на 360º, находится прямо на крюке и упрощает позиционирование и опускание груза. Масштабирование камеры по размеру груза производится путем графической оценки. Ультразвуковые датчики на крюке крана контролируют окружающее пространство и обеспечивают данные, выводимые на дисплей, о расстоянии до выявленных на изображении с камеры объектов, а также их величине. Расстояние и величина могут быть рассчитаны по изображению с камеры также с помощью алгоритма.
Взгляд на противострелу происходит посредством камер, которые проецируют изображения на дисплеи, расположенные в кабине в местах боковых зеркал и/или зеркал заднего вида. Также существует возможность воспользоваться изображениями с камер под кранами через радио- или кабельное соединение, чтобы увеличить поле зрения.
На крюке крана смонтирована предпочтительно речевая установка к кабине крана, которая обеспечивает связь между строителем и оператором крана. Она содержит микрофон и динамик. Существует также возможность установления связи с другими кранами через радио- или кабельное соединение.
Как видно на фиг. 16, кран 2000 может содержать один или несколько прожекторов, которые могут включать в себя несколько осветительных средств с возможностью свечения одним или несколькими цветами. При этом осветительные средства могут находиться также на одном отдельном или нескольких микрочипах.
За счет большего числа источников света можно управлять зоной освещения и световыми конусами и, при необходимости, регулировать также без поворота прожекторов путем изменения силы света (фиг. 16), причем поворот прожекторов может быть также предусмотрен.
Прожекторы могут содержать подходящую оптику и/или лазерные осветительные средства, чтобы обеспечить сильное точечное освещение.
За счет оптического детектирования посредством камер или датчиков можно с помощью речевого или сенсорного ввода на дисплее произвольно персонализированно конфигурировать освещаемую зону. Также можно освещать другим цветом только необходимые для работы зоны, например грузовые крюки или целевые положения, или же только зоны, необходимые для персонала охраны. Для этого также используется аутентификация персонала.
С помощью лазерного света также движения и направления и/или пути перемещения, например также автономного крана, могут проецироваться на стройплощадку, чтобы указать персоналу стройплощадки на ситуацию. Также с помощью камеры могут регистрироваться находящиеся на пути движения лица, которым с помощью освещения может быть указано на это.
Прожекторы могут находиться на кране в разных местах, например на грузовом крюке. Благодаря точечному освещению уменьшается световое загрязнение, и экономится энергия.
На кране размещены также фасонные световые элементы, которые могут придавать ему ночью визуальный «облик». На внешней стороне кабины могут быть размещены также дисплеи, которые обеспечивают визуализацию рекламы или другой информации, например о стройплощадке. Реклама или другая информация может проецироваться на внешнюю сторону также проектором.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ДЛЯ КРАНА, СТРОИТЕЛЬНОЙ МАШИНЫ И/ИЛИ АВТОПОГРУЗЧИКА | 2017 |
|
RU2741456C2 |
| СИМУЛЯТОР ПОДЪЕМНОГО КРАНА, СТРОИТЕЛЬНОЙ МАШИНЫ ИЛИ ВИЛОЧНОГО ПОГРУЗЧИКА | 2017 |
|
RU2730697C2 |
| Система дистанционного управления строительной машиной | 2023 |
|
RU2817073C1 |
| СТРОИТЕЛЬНАЯ МАШИНА, В ЧАСТНОСТИ ЗЕМЛЕРОЙНО-ТРАНСПОРТНАЯ МАШИНА С ПУЛЬТОМ ОБСЛУЖИВАНИЯ | 2018 |
|
RU2781962C2 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ДЛЯ КРАНА, СТРОИТЕЛЬНОЙ МАШИНЫ И/ИЛИ АВТОПОГРУЗЧИКА | 2017 |
|
RU2719048C1 |
| СИСТЕМА ДЛЯ ЦЕНТРАЛЬНОГО УПРАВЛЕНИЯ ОДНИМ ИЛИ НЕСКОЛЬКИМИ КРАНАМИ | 2016 |
|
RU2731939C2 |
| УСТРОЙСТВО ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА С ГРАФИЧЕСКИМ ДИСПЛЕЕМ (ВАРИАНТЫ) | 2006 |
|
RU2326806C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ С ИНТЕГРИРОВАННЫМ ОСТЕКЛЕНИЕМ | 2019 |
|
RU2774246C1 |
| РАБОЧАЯ МАШИНА, ИМЕЮЩАЯ УСТРОЙСТВО ОТОБРАЖЕНИЯ | 2018 |
|
RU2764231C2 |
| МОДЕЛИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ КРАНА, СТРОИТЕЛЬНОЙ МАШИНЫ ИЛИ СРЕДСТВА НАПОЛЬНОГО ТРАНСПОРТА | 2017 |
|
RU2730796C2 |







Пост управления краном, экскаватором, бульдозером или подобной строительной машиной содержит кресло, несколько элементов управления для ввода управляющих элементов, устройство (402) отображения, блок управления для формирования исполнительных сигналов в зависимости от входных управляющих команд и/или для обеспечения информации для функций отображения. Пост управления содержит настроечное устройство для настройки и хранения индивидуальных предустановок эксплуатационных параметров, и/или функций элементов управления, и/или устройства отображения, и/или дополнительных вспомогательных устройств и содержит идентификационное устройство для идентификации соответствующего водителя машины на основе детектируемого идентифицирующего признака. Причем блок управления выполнен с возможностью предоставления предустановок на основе соответствующего выявленного идентифицирующего признака. Устройство отображения содержит дисплей (402) с сенсорным экраном, который образует поверхность подлокотника кресла и/или проходит вдоль подлокотника приблизительно на высоте его верхней стороны, или встроен в поверхность участка взятия рычага управления. Предложен также кран, содержащий пост управления. Достигается обеспечение возможности более комфортного, интуитивного и тем самым надежного обслуживания поста управления, которое учитывало бы различия отдельных водителей машин и в равной мере оставался бы хороший обзор. 2 н. и 35 з.п. ф-лы, 17 ил.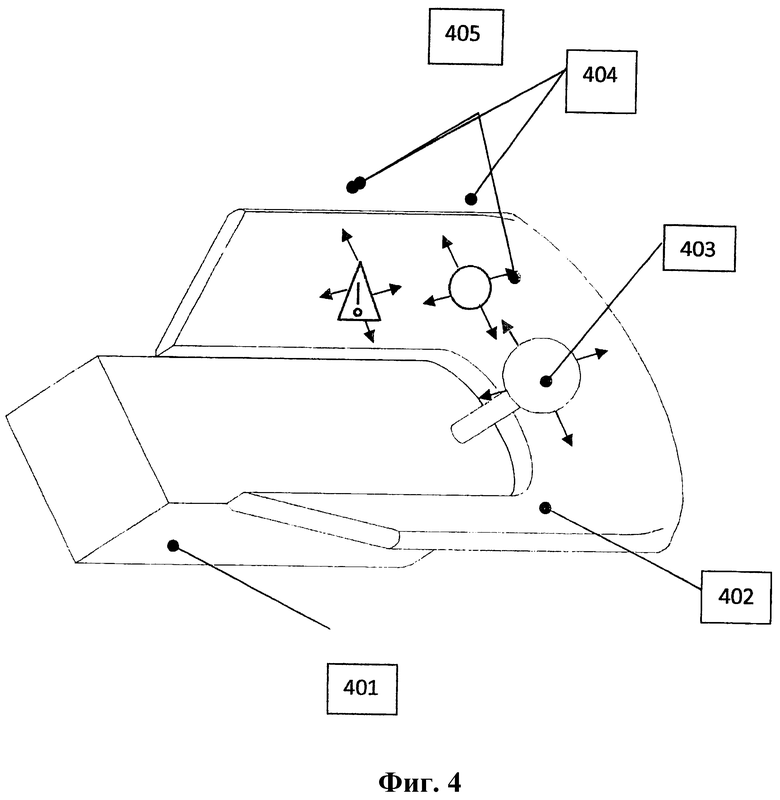
1. Пост управления краном, экскаватором, бульдозером или подобной строительной машиной, содержащий кресло (701), несколько элементов (202) управления для ввода управляющих элементов, по меньшей мере одно устройство (402, 502, 602) отображения для отображения информации, а также блок управления для формирования исполнительных сигналов в зависимости от входных управляющих команд и/или для обеспечения информации для функций отображения, отличающийся тем, что содержит настроечное устройство (2010) для настройки и хранения индивидуальных предустановок эксплуатационных параметров, и/или функций элементов (2011) управления, и/или устройства (2012) отображения, и/или дополнительных вспомогательных устройств; и содержит идентификационное устройство для идентификации соответствующего водителя машины на основе детектируемого идентифицирующего признака, причем блок (2013) управления выполнен с возможностью предоставления предустановок на основе соответствующего выявленного идентифицирующего признака,
и устройство (2012) отображения содержит дисплей (402, 502) с сенсорным экраном, который
образует поверхность подлокотника (501) кресла и/или проходит вдоль подлокотника приблизительно на высоте его верхней стороны,
или встроен в поверхность участка взятия рычага (301) управления.
2. Пост управления по п. 1, в котором настраиваемые настроечным устройством (2010) предустановки включают в себя по меньшей мере один из следующих элементов:
- сопротивление движению, и/или возвратное усилие, и/или возвратный момент рычага управления,
- длину рычага управления,
- положение графического элемента управления на элементе сенсорного экрана и
- положение элемента отображения и/или элемента управления на устройстве отображения,
- регулировку кресла и/или регулировку дополнительных вспомогательных агрегатов.
3. Пост управления по п. 1 или 2, в котором по меньшей мере один элемент управления выполнен с возможностью присвоения ему различных управляющих функций и/или различных характеристик, при этом присвоение элементу управления определенной выбранной управляющей функции и/или характеристики персонализированно сохраняется в памяти.
4. Пост управления по одному из предыдущих пунктов, в котором устройство (2012) отображения содержит по меньшей мере два дисплея (402, 502) с сенсорным экраном, который образует по меньшей мере частично поверхность подлокотника (501) кресла и/или проходит вдоль подлокотника приблизительно на высоте его верхней стороны.
5. Пост управления по п. 4, в котором по меньшей мере один дисплей (402) с сенсорным экраном имеет поверхность отображения и/или касания с трехмерным контуром, которая проходит вдоль нескольких сторон подлокотника и образует поднимающийся от верхней стороны подлокотника бортик.
6. Пост управления по одному из предыдущих пунктов, в котором устройство (2012) отображения содержит по меньшей мере два дисплея (304) с сенсорным экраном, который встроен в поверхность участка взятия рычага (301) управления, причем дисплей с сенсорным экраном имеет поверхность отображения и/или касания с трехмерным контуром, которая встроена в контур поверхности рычага управления и предпочтительно непрерывно продолжает ее.
7. Пост управления по одному из предыдущих пунктов, в котором устройство (2012) отображения имеет поверхность отображения и/или управления, которая образует и/или закрывает по меньшей мере частично остекление (601) кабины и/или облицовку внутренней стенки кабины.
8. Пост управления по п. 7, в котором по меньшей мере часть поверхности отображения и/или управления образована дисплеем с сенсорным экраном и/или поверхность отображения и/или управления связана с устройством для детектирования жестов водителя машины.
9. Пост управления по одному из пп. 1-8, в котором устройство (2012) отображения содержит устройство введения изображения, предназначенное для ввода изображения с камеры в зонах поверхности отображения и/или управления на участок остекления кабины, на котором в направлении взгляда водителя машины лежит загораживающий обзор элемент, причем указанное изображение с камеры включает в себя изображение рабочей зоны, лежащей позади загораживающего обзор элемента.
10. Пост управления по одному из предыдущих пунктов, в котором устройство (2012) отображения выполнено с возможностью представлять динамически изменяющееся по положению отображение элементов отображения и/или управления, причем указанный пост управления содержит устройство детектирования положения головы и/или направления взгляда водителя машины; и/или содержит устройство детектирования положения грузозахватного средства и/или захватываемого груза, причем блок (2004) управления выполнен с возможностью динамического смещения элементов отображения и/или управления на поверхности отображения устройства (2012) отображения в зависимости от выявленного положения головы и/или направления взгляда водителя машины и/или в зависимости от выявленного положения грузозахватного средства и/или груза, таким образом, чтобы элементы отображения и/или управления оставались в поле зрения водителя машины.
11. Пост управления по одному из предыдущих пунктов, который содержит детектирующие средства для автоматического детектирования телосложения и/или полноты водителя машины, и содержит установочное устройство для автоматической установки по меньшей мере одного эксплуатационного параметра кресла (2015) в зависимости от выявленного телосложения и/или полноты.
12. Пост управления по п. 11, в котором детектирующие средства для автоматического детектирования телосложения и/или полноты содержат по меньшей мере один датчик давления в сиденье кресла (2015) и оптические детектирующие средства для определения роста водителя машины, причем кресло выполнено с возможностью установки по меньшей мере одного из следующих его эксплуатационных параметров: высота кресла, сила пружин и/или амортизации, наклон кресла, наклон спинки, контур боковин.
13. Пост управления по одному из предыдущих пунктов, который содержит устройство для детектирования положения головы и/или направления взгляда водителя машины и/или для детектирования положения грузозахватного средства и/или положения груза, а также содержит устройство настройки ориентации кресла (2015) для его автоматического наклона и/или поворота в зависимости от выявленного положения головы и/или направления взгляда водителя машины и/или в зависимости от выявленного положения грузозахватного средства и/или груза.
14. Пост управления по п. 13, в котором кресло (2015) снабжено по меньшей мере одним удерживающим ремнем и/или удерживающей скобой (801) для удержания водителя машины на кресле (2015), указанный пост управления содержит автоматическое натяжное устройство для натяжения удерживающего ремня и/или удерживающей скобы (801) в зависимости от наклона кресла (2015).
15. Пост управления по одному из предыдущих пунктов, который содержит многозонную установку кондиционирования воздуха для позонного регулирования по-разному температуры, и/или качества, и/или влажности воздуха с климатическим, управляющим и/или регулирующим устройством, содержащим настроечные средства для настройки индивидуальных заданных значений для различных климатических зон.
16. Пост управления по п. 15, в котором устройство (2012) отображения имеет поверхность отображения для отображения климатических зон, а настроечные средства включают в себя сенсорную систему для детектирования жестов и/или касаний на поверхности отображения.
17. Пост управления по п. 15 или 16, в котором многозонная установка кондиционирования воздуха выполнена с возможностью переменной настройки в отношении размера, и/или положения, и/или контура климатических зон относительно кресла (2015).
18. Пост управления по одному из предыдущих пунктов, который содержит коммуникационное устройство для передачи голосовых и/или текстовых сообщений, подключенное к устройству (2012) отображения, которое содержит коммуникационно-отображающую поверхность для отображения коммуникационной информации.
19. Пост управления по п. 18, в котором коммуникационно-отображающая поверхность имеет изображение рабочей зоны и находящихся в ней возможных коммуникационных партнеров, причем
- коммуникационно-отображающая поверхность снабжена маркировочными средствами для выделения коммуникационного партнера, с которым установлено или устанавливается коммуникационное соединение, и/или
- пост управления содержит средства для выбора коммуникационного партнера, отображенного на изображении рабочей зоны, при этом коммуникационное устройство выполнено с возможностью установления коммуникационного соединения с выбранным коммуникационным партнером в зависимости от сделанного в изображении рабочей зоны выбора.
20. Пост управления по п. 18 или 19, который содержит устройство контроля столкновений, предназначенное для контроля возможного столкновения с находящимся в рабочей зоне коммуникационным партнером на основе текущего или запланированного пути перемещения, причем коммуникационное устройство выполнено с возможностью автоматического установления коммуникационного соединения с коммуникационным партнером, как только устройство контроля столкновений определит возможное столкновение с указанным коммуникационным партнером.
21. Пост управления по одному из пп. 18-20, в котором коммутационное устройство содержит кнопку экстренного вызова для установления соединения экстренного вызова, причем коммутационное устройство выполнено с возможностью передачи дополнительных эксплуатационных данных при установлении соединения экстренного вызова, включающих в себя данные датчиков и/или изображения с камер.
22. Пост управления по п. 21, который содержит устройство получения метеоданных и/или данных метеопрогноза, при этом коммутационное устройство выполнено с возможностью автоматического выполнения экстренного вызова погоды в зависимости от полученных метеоданных и/или данных метеопрогноза.
23. Пост управления по одному из предыдущих пунктов, который содержит противошумовое устройство для компенсации окружающего шума и/или уменьшения воздействующих на водителя машины в кресле (2015) шумовых нагрузок, причем указанное противошумовое устройство включает в себя по меньшей мере один датчик шума, в частности микрофон, и по меньшей мере один звуковой генератор для генерирования противошума, причем указанный пост управления содержит устройство управления противошумом, предназначенное для управления звуковым генератором в зависимости от сигнала указанного по меньшей мере одного датчика шума.
24. Пост управления по п. 23, в котором указанный по меньшей мере один звуковой генератор содержит по меньшей мере один вибратор, который прикреплен к стенке кабины и/или остекления кабины и выполнен с возможностью возбуждения вибрации стенки кабины и/или остекления кабины.
25. Пост управления по п. 23 или 24, который содержит несколько датчиков шума, из которых
- по меньшей мере один датчик шума расположен вне кабины водителя,
- по меньшей мере один датчик шума расположен внутри кабины водителя и/или внутри двойной стенки кабины;
и/или указанный пост управления содержит несколько противошумовых генераторов, из которых
- по меньшей мере один противошумовой генератор расположен вне кабины водителя,
- по меньшей мере один противошумовой генератор расположен внутри кабины водителя и/или внутри двойной стенки кабины.
26. Пост управления по одному из предыдущих пунктов, который содержит стеклоочистительное устройство по меньшей мере с одним стеклоочистителем (2016) для очистки остекления кабины водителя, причем зона очистки стеклоочистителем (2016) является изменяемой и устанавливается в зависимости по меньшей мере от одного эксплуатационного параметра поста управления и/или является управляемой с поста управления машины.
27. Пост управления по п. 26, который содержит устройство детектирования, предназначенное для детектирования сопротивления очистке и/или препятствия очистке, причем зона очистки стеклоочистителем (2016) в зависимости от выявленного сопротивления очистке и/или препятствия очистке ограничена зоной очистки, в которой выявленное сопротивление очистке остается ниже заданного предельного значения и/или вне указанного препятствия очистке.
28. Пост управления по п. 27, который содержит приподнимающее устройство, предназначенное для приподнятия стеклоочистителя (2016) от очищаемого остекления и выполненное с возможностью управления в зависимости от сигнала указанного устройства детектирования таким образом, что стеклоочиститель (2016) приподнимается над выявленным препятствием очистке и/или зоной очистки, в которой выявленное сопротивление очистке превышает заданное предельное значение.
29. Пост управления по одному из пп. 26-28, который содержит детектирующее устройство, предназначенное для детектирования положения головы и/или направления взгляда водителя машины и/или для детектирования положения грузозахватного средства и/или положения груза, причем зона очистки стеклоочистителем (2016) в зависимости от выявленного положения головы и/или направления взгляда водителя машины и/или в зависимости от выявленного положения грузозахватного средства и/или положения груза автоматически устанавливается таким образом, что зона очистки стеклоочистителем (2016) смещается вместе с полем зрения водителя машины.
30. Пост управления по одному из пп. 27-29, в котором стеклоочиститель (2016) содержит изменяемый по длине рычаг с относящимся к нему исполнительным органом регулирования длины и/или привод стеклоочистителя имеет регулируемый диапазон перемещения.
31. Пост управления по одному из предыдущих пунктов, который снабжен осветительным устройством для освещения поста управления, причем осветительное устройство содержит несколько светильников для освещения различных зон освещения, которые выполнены с возможностью регулируемой настройки в отношении цвета и/или силы света независимо друг от друга, чтобы создавать в различных зонах освещения различные цвета и/или различную силу света.
32. Пост управления по п. 31, который содержит устройство контроля столкновений, предназначенное для контроля возможных столкновений, и устройство управления светом, предназначенное для изменения цвета и/или силы света в зоне освещения, обращенной к возможному столкновению, в зависимости от сигнала устройства контроля столкновений.
33. Пост управления по п. 31 или 32, который содержит по меньшей мере один датчик яркости для детектирования яркости на указанном посту управления, причем в зависимости от сигнала яркости датчика яркости осуществляется регулируемая настройка цвета освещения и/или силы света.
34. Пост управления по одному из предыдущих пунктов, который содержит осветительное устройство, предназначенное для освещения рабочей зоны управляемой с поста управления машины и содержащее несколько светильников для освещения различных зон освещения, причем светильники выполнены с возможностью индивидуального регулирования в отношении цвета и/или силы света, чтобы создавать в различных зонах освещения разные цвета и/или разную силу света.
35. Пост управления по п. 34, в котором по меньшей мере один из светильников выполнен с возможностью изменения своей ориентации, причем пост управления снабжен управляющим устройством для управления ориентацией указанного по меньшей мере одного светильника в зависимости от положения грузозахватного средства и/или груза таким образом, чтобы создаваемая светильником зона освещения автоматически смещалась вместе с грузозахватным средством и/или грузом.
36. Пост управления по п. 34 или 35, в котором по меньшей мере один светильник выполнен изменяемым в отношении положения, и/или величины, и/или контура освещенной им зоны освещения и с возможностью автоматического управления устройством управления в зависимости от текущего или запланированного пути перемещения грузозахватного средства таким образом, чтобы создаваемая светильником зона освещения обозначала и/или освещала путь перемещения грузозахватного средства.
37. Кран, содержащий пост управления по любому из пп. 1-36.
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| DE 20201955 U1, 16.05.2002 | |||
| DE 102014201863 A1, 06.08.2015. | |||

