Настоящее изобретение относится к усовершенствованной системе для отображения информации операторам самоходных рабочих машин.
Известно, что на панелях кабин операторов телескопических погрузчиков или телескопических подъемников устанавливаются дисплейные устройства, которые показывают оператору информацию, необходимую для правильного управления машиной, например эпюры нагрузок, скорость передвижения, данные, измеренные датчиками, установленными на транспортном средстве, и, прежде всего, указатели, отражающие устойчивость транспортного средства.
Одной из проблем, на которую часто жалуются операторы, заключается в том, что пока они управляют рычагом телескопической подъемной стрелы, необходимо внимательно следить за подъемным устройством и грузом, который оно несет, как для надлежащего выполнения операции, так и из соображений безопасности; однако по точно тем же причинам во время манипуляций с рычагом оператор должен следить за дисплеем, чтобы быть в курсе изменения различных параметров, которые на нем отображаются.
Эта ситуация представляет неудобство для операторов телескопических погрузчиков и не только отрицательно влияет на эффективность работы, но и может привести к ошибкам при выполнении маневров.
Техническая цель, на достижение которой направлено настоящее изобретение, состоит в создании самоходной рабочей машины, в которой преодолены ограничения, присущие современному уровню техники и описанные выше.
Эта техническая цель достигнута в рабочей машине, выполненной по п. 1 формулы изобретения.
Дополнительные особенности и преимущества настоящего изобретения станут очевидны из описания предпочтительного варианта выполнения предложенной машины, не ограничивающих настоящее изобретение, как показано на сопровождающих чертежах, где:
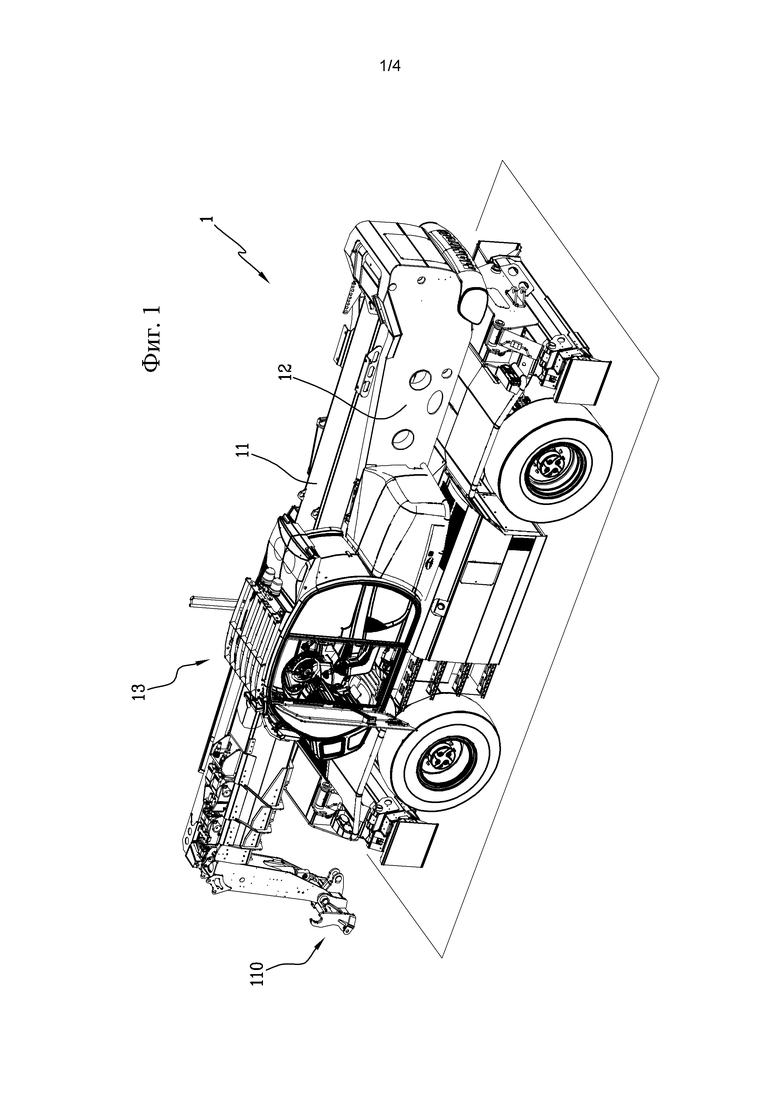
на фиг. 1 показана аксонометрическая проекция машины согласно изобретению;
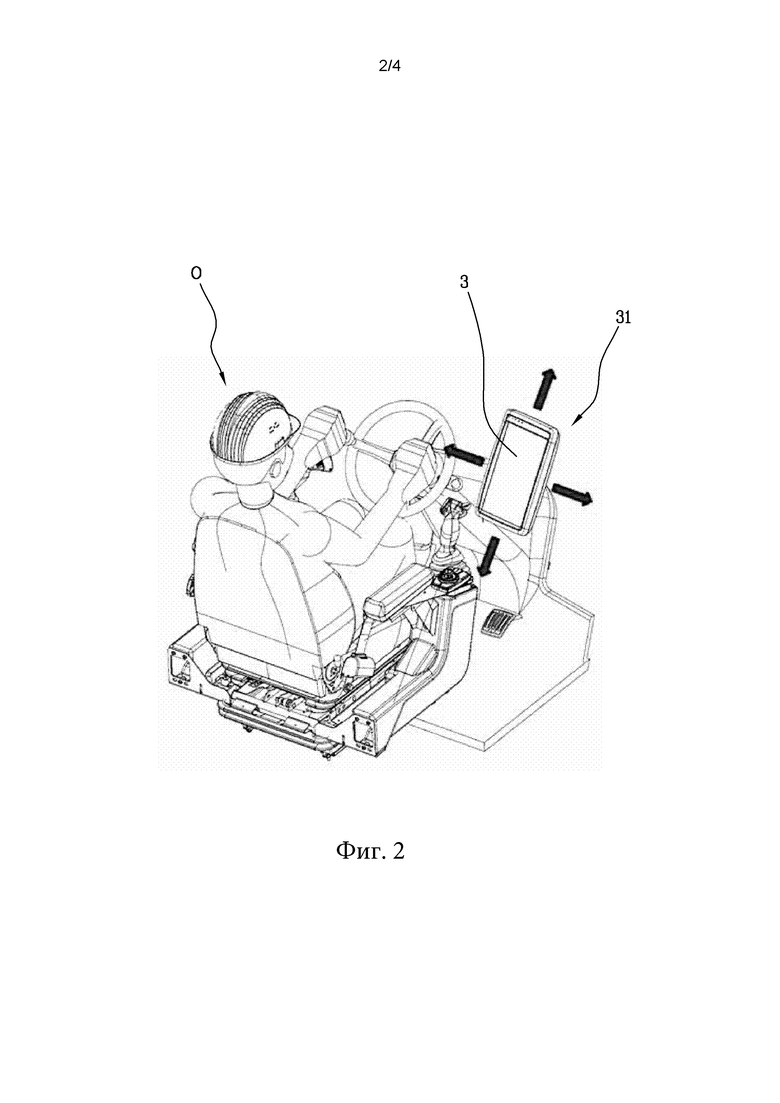
на фиг. 2 показана аксонометрическая проекция внутренней части кабины машины, изображенной на фиг. 1, согласно первому варианту выполнения настоящего изобретения; и
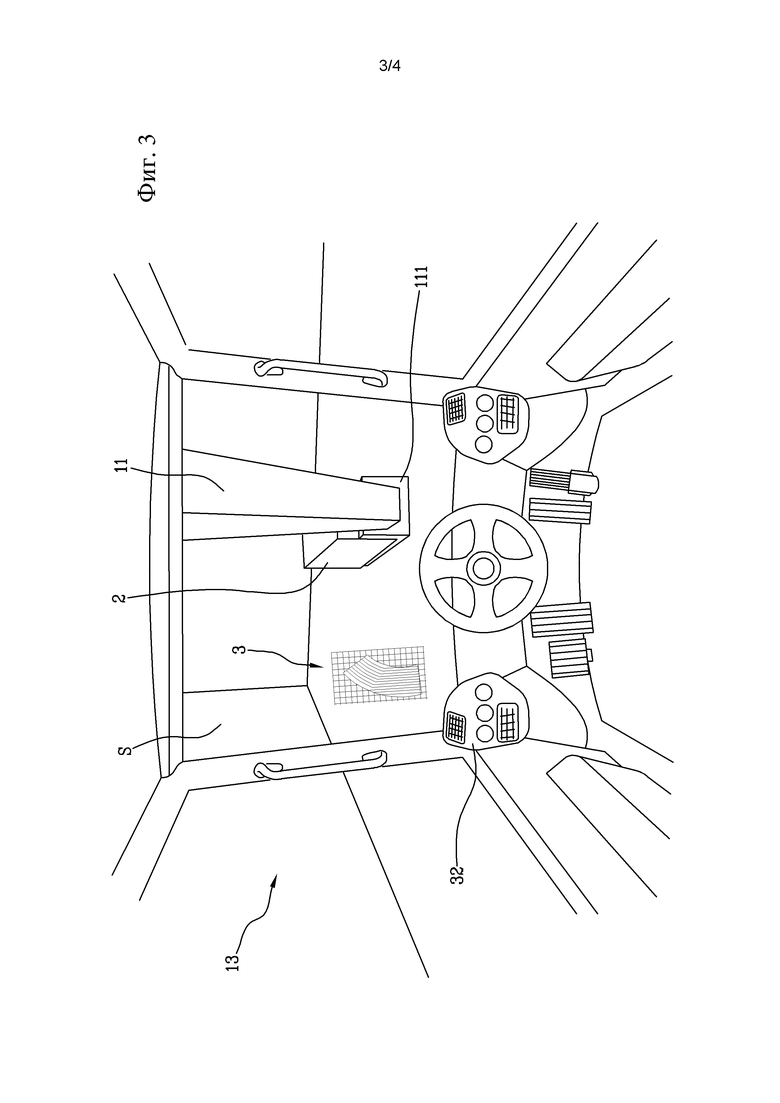
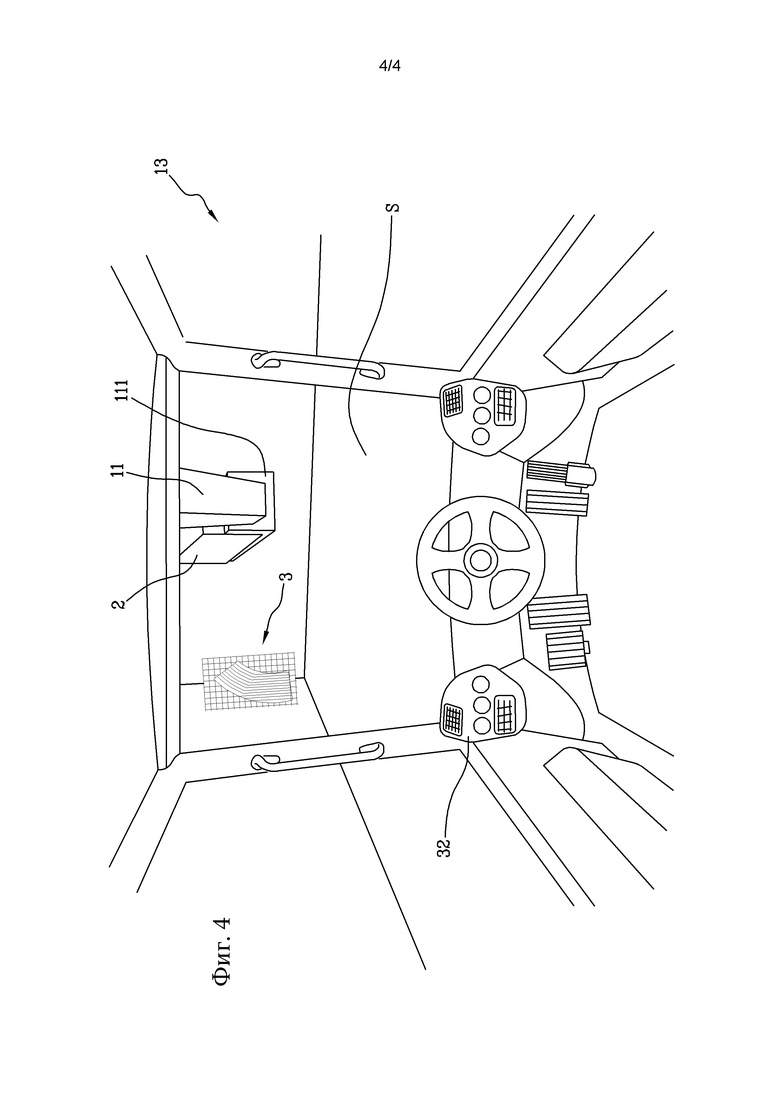
на фиг. 3 и 4 показана внутренняя часть кабины машины, изображенной на фиг. 1, в двух различных рабочих конфигурациях, согласно второму варианту выполнения настоящего изобретения.
На сопровождающих чертежах позицией 1 обозначена самоходная рабочая машина в целом согласно изобретению.
Более подробно, машина 1 согласно изобретению предпочтительно представляет собой телескопический подъемник и может быть поворотного (как показано на фиг. 1), стационарного или сочлененного типа.
Предложенная машина 1 содержит раму или шасси, способное перемещаться на колесах, кабину водителя, подъемную телескопическую стрелу 11, установленную на вращающейся платформе 12, которая, если присутствует, также содержит кабину 13, а стрела на своем дальнем конце имеет соединительное устройство 110, также типа, обычно используемого в телескопических подъемниках, изготавливаемых заявителем, которое позволяет менять устройство 111 и соединять его с гидравлическим и электронным оборудованием машины 1.
Термин «устройство» 111, как схематично показано на фиг. 3 и 4, означает как приспособление для захвата груза 2, такое как вилка, устройство для бокового перемещения, лебедку, захватное устройство и т.д., так и приспособление для подъема людей, а при необходимости и грузов, например клеть.
Стрела 11 шарнирно связана с вращающейся платформой 12 с возможностью вертикального перемещения с помощью гидравлического цилиндрического или аналогичного исполнительного механизма между нижним положением, по существу горизонтальным, и верхним положением, когда стрела 11 близка к вертикальному положению.
Стрела 11 способна выдвигаться и втягиваться, а точнее, содержит множество сегментов, вставленных один в другой коаксиально и способных перемещаться в осевом направлении.
Выдвижение и втягивание стрелы 11 также производится с помощью одного или нескольких гидравлических цилиндров или других исполнительных механизмов.
Вращение платформы 12 также предпочтительно производится таким же образом с помощью гидравлического привода, связанного, например, со стойкой, а исполнительный механизм, который перемещает оборудование относительно одного или более его сочленений, предпочтительно является гидравлическим.
Гидравлические приводы связаны с электрогидравлическим распределителем, установленным на машине 1 и управляемым посредством органов управления, расположенных в кабине 13 согласно известным способам.
На практике машина 1 согласно изобретению содержит органы управления в кабине 13, такие как джойстик, педали, кнопки и т.д., приводимые в действие оператором О (см. фиг. 2); при воздействии на органы управления генерируются сигналы, принимаемые от распределителя 14, которые затем управляют работой исполнительных механизмов стрелы 11, устройства 111 и платформы 13 (или других подвижных элементов).
Кроме того, изобретение относится к случаю, когда исполнительные механизмы привода относятся к электромеханическому и негидравлическому типу.
Согласно важному аспекту изобретения, машина 1 содержит систему для отображения информации оператору О, находящемуся в кабине 13, при этом эта система содержит по меньшей мере один подвижный дисплейный элемент 3.
Подвижный дисплейный элемент 3 предназначен специально для отображения оператору О информации об устойчивости машины с особым вниманием к величине опрокидывающего момента, который воздействует на машину, в реальном времени в случае приближения к опасному порогу, за которым имеется ограничение или запрещение работать со стрелой.
В действительности телескопические подъемники оборудованы системой для управления опрокидывающим моментом (например, продольным моментом) и содержит указатель, характеризующий степень близости к опасному состоянию.
Этот указатель может быть, например, градуированной шкалой, например, образованной рядом светодиодов, размещенных на дисплее.
Кроме того дисплейный элемент 3 может также отображать оператору О информацию и данные, которые, в известном из уровня техники решении, описанном выше, показывает классический дисплей, то есть, согласно примеру, не ограничивающему настоящее изобретение, эпюры нагрузки, скорость перемещения, данные, измеренные датчиками, установленными на транспортном средстве, и т.д.
Согласно одному из вариантов выполнения настоящего изобретения, показанному на фиг. 2, дисплейный элемент 3 представляет собой «физический» дисплей, в том смысле, что представляет собой экран, например, сенсорный экран, или экран «пассивного» типа, размещенный в электронном дисплейном устройстве 31, которое содержит кожух, пользовательский интерфейс (который может содержать кнопки, рычаги или аналогичные управляющие устройства, в дополнение или альтернативно функциям сенсорного экрана, и один или более микропроцессоров или микроконтроллеров, которые управляют отображением рабочих данных машины 1 и передачей информации и команд посредством вышеуказанного пользовательского интерфейса.
Если дисплейный элемент 3 представляет собой физический дисплей, он может также быть определен комбинацией нескольких средств для отображения вышеуказанной информации, например, представлять собой экран и один или более физических дисплеев, расположенных в вышеуказанном дисплейном устройстве 31.
Более подробно, в конкретном варианте выполнения, не ограничивающем настоящее изобретение, может также иметься градуированная шкала, сформированная вышеуказанной последовательностью дисплеев, которая позволяет оператору иметь оперативное представление о степени близости к опасной ситуации на основе обнаруженного опрокидывающего момента.
Например, эта шкала может содержать светодиоды различных цветов; например, если взять последовательность от зеленых светодиодов к желтым и красным светодиодам, такая шкала даст интуитивное представление, насколько близко потенциально опасное состояние.
Дополнительно или альтернативно, градуированный указатель может быть представлен на экране «виртуально», то есть быть представлен не в виде светодиодов и т.п., а в виде графических указателей.
Важный аспект дисплейного элемента 3 согласно изобретению состоит в том, что его можно перемещать, вручную и/или автоматически, чтобы его можно было установить в кабине 13 в положение, удобное для оператора О, особенно во время использования рабочей стрелы 11.
С этой целью, согласно первому варианту выполнения настоящего изобретения, система для отображения согласно изобретению содержит механизм, который поддерживает дисплейное устройство 31 и обеспечивает его перемещение.
Например, этот механизм может состоять из одного или более шарнирно-сочлененных рычагов или одной или более кареток, перемещающихся вдоль направляющей, которая идет, например, вдоль стойки кабины 13, или могут быть использованы другие решения.
Если перемещение происходит вручную, механизм может быть переконфигурирован после действия оператора О, который в этом случае перемещает рукоятку устройства 31, оборудованного дисплеем 3, в желаемое положение, и этот механизм способен также неподвижно удерживать дисплейное устройство 31, как только оно оказывается расположено в самом удобном месте для оператора О телескопического подъемника.
Согласно варианту выполнения настоящего изобретения, схематично показанному на фиг. 3 и 4, система для отображения содержит светопроекционное устройство 32, расположенное в кабине 13 и проецирующее вышеуказанный дисплейный элемент 3 на поверхность S, например внутреннюю поверхность ветрового стекла или окна кабины 13, так чтобы он отражался и был виден оператору О.
На практике в этом случае проекционное устройство 32 посылает луч света, который показывает дисплейное устройство 3 с информацией, полезной для управления телескопическим подъемником 1 и, в частности, для выполнения маневров подъемной телескопической стрелой 11.
Проекционное устройство 32 выполнено с возможностью регулировки положения дисплея 3 на отражающей поверхности S, то есть имеется возможность перемещать его по команде оператора О при ручном включении или автоматически, что является опцией, рассматриваемой ниже.
В этом случае дисплей 3 является не «физическим» в том смысле, что это не экран, а «виртуальным», так как определяется лучом отраженного света, испущенного проектором 32.
В одном специфическом варианте выполнения настоящего изобретения, который может быть реализован в случае как «физического», так и виртуального дисплея, рассматриваемый дисплей 3 перемещается автоматически.
В этом случае предложенная машина 1 может содержать, во-первых, средство для обнаружения по меньшей мере одного параметра, относящегося к положению рабочей стрелы 11, и для формирования сигнала положения, как функции указанного параметра положения.
Средства обнаружения могут содержать один или более датчиков положения, предназначенных для определения относительного положения груза 2 (или, в любом случае, устройства 111) относительно опорной точки, например, рамы машины 1, или положения оператора О в кабине 13, или другого положения.
Один из этих датчиков может измерять угол между стрелой 11 и рамой, а другой - скольжение или удлинение стрелы 11, и оба могут состоять из кодирующих устройств, должным образом связанных с рычагами для определения угла или с кабелями для определения длины, или быть датчиками положения, установленными в цилиндрах привода, или датчиками других типов.
В этом варианте выполнения настоящего изобретения машина 1 может также содержать обрабатывающее средство, предназначенное для приема вышеуказанного сигнала положения и содержащее модуль позиционирования, сконфигурированный для формирования сигнала позиционирования как функции сигнала перемещения, и предназначенный для определения целевого положения дисплейного элемента 3.
Следует отметить, что в этом описании обрабатывающее средство может содержать обрабатывающие блоки, которые для наглядности и полноты описания представлены здесь в виде отдельных функциональных модулей.
На практике обрабатывающий блок может состоять из одного электронного устройства обычного типа, устанавливаемого на такие машины, такого как блок управления, запрограммированный соответственно для выполнения описанных выше функций; различные модули могут соответствовать аппаратным блокам и/или программному обеспечению, являющемуся частью программируемого устройства.
Альтернативно или дополнительно, эти функции могут быть выполнены множеством электронных устройств, среди которых могут быть распределены вышеуказанные функциональные модули.
В общем случае обрабатывающий блок может содержать один или более микропроцессоров или микроконтроллеров, предназначенных для выполнения инструкций, содержащихся в модулях памяти, и вышеуказанные функциональные модули также могут быть распределены среди множества локальных или удаленных вычислительных устройств в рамках сетевой архитектуры, в которой они работают.
Согласно варианту выполнения настоящего изобретения с физическим дисплеем 3, который перемещается благодаря механизму перемещения, последний может быть связан со средствами перемещения, например, электродвигателями, которые сконфигурированы для приема вышеуказанного сигнала перемещения и соответственно приводят в действие механизм перемещения.
В случае виртуального дисплея 3 именно проекционное устройство 32 принимает сигнал перемещения и, следовательно, перемещает проецируемый дисплейный элемент 3, изменяя направление проецируемого светового луча.
Предпочтительно, чтобы модуль позиционирования в обрабатывающем средстве был сконфигурирован так, чтобы формировать сигнал перемещения, предназначенный для помещения дисплейного элемента 3 в положение, в котором, при наблюдении из точки обзора оператора О в кабине 13, он остается близко к устройству 111 или к грузу 2, и предпочтительно находится рядом.
Например, положение дисплея 3 может регулироваться так, чтобы составлять одно целое с изображением устройства 111 или груза 3 при его наблюдении оператором О; другими словами, если провести линии визирования из положения оператора О к дисплею 3 и к грузу 2 (или устройству 111), между ними может поддерживаться по существу постоянное угловое расстояние.
В случае виртуального дисплея 3 его изображение, спроецированное на поверхность S ветрового стекла, может оставаться по существу на постоянном расстоянии по отношению к относительному расстоянию изображения груза 2 (или устройства 111) на ветровом стекле для смотрящего оператора О.
В частности, рабочая стрела 11 может подниматься и опускаться или удлиняться и укорачиваться, что, при наблюдении из точки обзора оператора О, всегда подразумевает, что груз 2 и устройство 111, которое его держит, поднимается или опускается.
Поэтому, если устройство 111 не совершает поперечных перемещений груза 2, а представляет собой, например, фиксированную вилку или клеть, дисплей 3 будет автоматически подниматься и опускаться в зависимости от перемещения стрелы 11 со смещением, которое соответствует вертикальному перемещению груза 2 (или устройства 111) с точки зрения оператора О, так чтобы направление визирования дисплея 3 всегда было близко к направлению на груз 2, то есть, чтобы они находились на расстоянии, на котором можно легко переводить взгляд с одного на другое.
В одном случае это будет дисплейное устройство 31, которое поднимается и опускается (физический дисплей), в другом - отражение от внутренней поверхности ветрового стекла светового луча, который представляет собой виртуальный дисплей 3.
Если, с другой стороны, устройство 111 совершает также поперечные перемещения, например, оно представляет собой качающуюся лебедку, поворотную вилку и т.д., то положение дисплея 3 будет регулироваться также в боковом направлении, то есть по горизонтали, в зависимости от положения груза 2 (или устройства 111).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ДЛЯ КРАНА, СТРОИТЕЛЬНОЙ МАШИНЫ И/ИЛИ АВТОПОГРУЗЧИКА | 2017 |
|
RU2741456C2 |
| КРАНОВОЕ ПРЕДОХРАНИТЕЛЬНОЕ УСТРОЙСТВО | 1989 |
|
RU2093452C1 |
| ПОСТ УПРАВЛЕНИЯ КРАНОМ, ЭКСКАВАТОРОМ И Т.П. | 2017 |
|
RU2737565C2 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ДЛЯ КРАНА, СТРОИТЕЛЬНОЙ МАШИНЫ И/ИЛИ АВТОПОГРУЗЧИКА | 2017 |
|
RU2719048C1 |
| СТРОИТЕЛЬНАЯ МАШИНА | 2017 |
|
RU2736896C2 |
| СТРОИТЕЛЬНАЯ МАШИНА | 2017 |
|
RU2754118C2 |
| ПОРТАТИВНОЕ ОКОНЕЧНОЕ ВСПОМОГАТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ ГОЛОГРАФИЧЕСКОГО ПРОЕЦИРОВАНИЯ И ПОЛЬЗОВАТЕЛЬСКОГО ИНТЕРФЕЙСА | 2020 |
|
RU2802455C2 |
| Система дистанционного управления строительной машиной | 2023 |
|
RU2817073C1 |
| ИСПОЛЬЗОВАНИЕ ВТОРОГО ЭКРАНА В КАЧЕСТВЕ ПЕРСОНАЛЬНОГО ПРОЕКЦИОННОГО ДИСПЛЕЯ НА ОЧКАХ | 2015 |
|
RU2661808C2 |
| СПОСОБ И СИСТЕМА ДЛЯ РАБОЧЕЙ МАШИНЫ СО СТРЕЛОЙ | 2009 |
|
RU2524737C2 |
Изобретение относится к грузовым рабочим машинам. Самоходная рабочая машина (1) оборудована кабиной (13) и системой для отображения информации оператору (О), находящемуся в кабине (13). Система для отображения содержит по меньшей мере один подвижный дисплейный элемент (3). Система отображения допускает перемещение дисплейного элемента (3) в положение, в котором, при наблюдении из точки обзора оператора (O) в кабине (13), указанный дисплейный элемент остается вблизи грузового устройства (111) или груза. Достигается повышение эффективности работы машины. 10 з.п. ф-лы, 4 ил.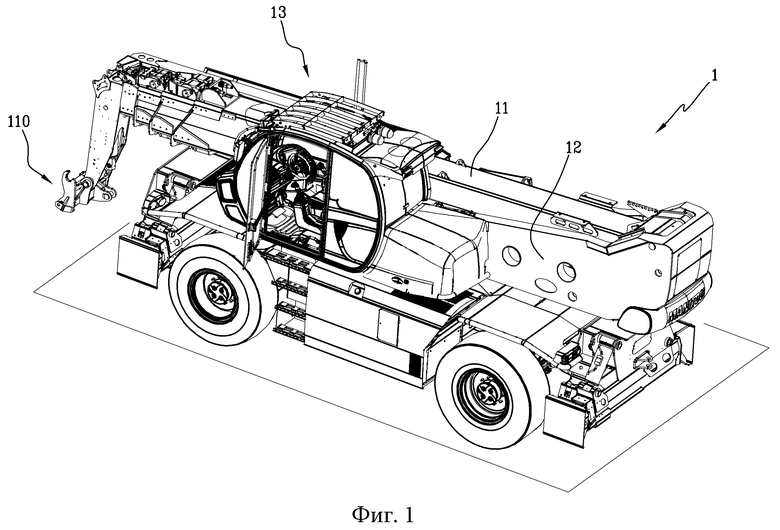
1. Самоходная рабочая машина (1), оборудованная рабочей стрелой (11) для подъема и перемещения грузового устройства (111), кабиной (13) и системой отображения для отображения информации об устойчивости машины оператору (O), находящемуся в кабине (13), с использованием по меньшей мере одного подвижного дисплейного элемента (3), при этом указанная система отображения допускает перемещение дисплейного элемента (3) в положение, в котором, при наблюдении из точки обзора оператора (O) в кабине (13), указанный дисплейный элемент остается вблизи грузового устройства (111) или груза (2).
2. Машина (1) по п. 1, в которой дисплейный элемент (3) представляет собой экран дисплейного устройства.
3. Машина (1) по любому из предыдущих пунктов, в которой указанный дисплейный элемент (3) может быть перемещен вручную.
4. Машина (1) по п. 2 или 3, в которой указанная система отображения содержит механизм, обеспечивающий перемещение дисплейного устройства (31).
5. Машина (1) по п. 1 или 3, в которой дисплейная система содержит светопроекционное устройство (32), предназначенное для проецирования указанного дисплейного элемента (3) на поверхность (S) с возможностью регулировки его положения.
6. Машина (1) по п. 5, в которой светопроекционное устройство (32) установлено так, чтобы проецировать дисплейный элемент (3) на внутреннюю поверхность (S) ветрового стекла кабины (13) или соответствующего окна.
7. Машина (1) по п. 1, в которой указанная система отображения выполнена с возможностью автоматического перемещения дисплейного элемента (3).
8. Машина (1) по п. 7, содержащая:
средство для обнаружения по меньшей мере одного параметра, относящегося к положению указанной стрелы (11), и формирования сигнала положения, как функции этого параметра положения; и
обрабатывающее средство, предназначенное для приема указанного сигнала положения и содержащее модуль позиционирования, сконфигурированный для формирования сигнала позиционирования как функции сигнала перемещения и предназначенный для определения целевого положения дисплейного элемента (3).
9. Машина (1) по п. 8, в которой указанный дисплейный элемент представляет собой экран дисплейного устройства, а система отображения содержит механизм для перемещения дисплейного устройств (31) и средство перемещения, соединенное с указанным механизмом перемещения и предназначенное для приема указанного сигнала перемещения и соответственного приведения в действие указанного механизма перемещения.
10. Машина (1) по п. 8, в которой система отображения содержит светопроекционное устройство (32), предназначенное для проецирования указанного дисплейного элемента (3) на поверхность (S), при этом светопроекционное устройство (32) выполнено с возможностью приема сигнала перемещения и соответствующего перемещения проецируемого дисплейного элемента (3).
11. Машина (1) по любому из пп. 8–10, в которой указанный модуль позиционирования сконфигурирован так, чтобы формировать сигнал перемещения, предназначенный для перемещения дисплейного элемента (3) в положение, в котором, при наблюдении из точки обзора оператора (O) в кабине (13), он остается вблизи грузового устройства (111) или груза (2).
| US 2018340316 A1, 29.11.2018 | |||
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ОБСЛУЖИВАНИЯ РАБОЧЕЙ МАШИНЫ И СПОСОБ ОБСЛУЖИВАНИЯ | 2013 |
|
RU2659116C2 |
| US 2014043269 A1, 13.02.2014 | |||
| DE 102015214761 A1, 09.02.2017 | |||
| ФУНГИЦИДНАЯ КОМПОЗИЦИЯ ДЛЯ СТРОИТЕЛЬНЫХ КОНСТРУКЦИЙ (ВАРИАНТЫ) | 2013 |
|
RU2536882C2 |
| US 2016193920 A1, 07.07.2016. | |||

