Это изобретение относится к системам и способам рулевого управления для состава транспортных средств, таких как состав подвижных конвейерных механизмов.
Ленточные конвейеры хорошо известны и являются действенными средствами для перемещения больших количеств материалов, таких как руда, уголь и гранулированный камень на заданное расстояние, либо в горизонтальном направлении, либо в вертикальном направлении, либо в обоих направлениях. Одна форма конвейерной системы, известная в горнодобывающей промышленности, является системой, содержащей ряд конвейеров, установленных на колесах с созданием подвижной системы. Из-за методов, которыми разрабатываются и расширяются шахты, может возникнуть необходимость в относительно длинной конвейерной системе, обеспечивающей перемещение по существу по криволинейной или зигзагообразной направляющей. При таких обстоятельствах может быть трудным и трудоемким перемещать конвейерную систему, когда это необходимо. Также должно быть понятно, что может возникнуть необходимость в перемещении конвейерной системы и внесения корректировок в систему достаточно часто, поскольку добывающие механизмы продвигаются вперед в шахтах.
В патенте США №5366059, опубликованном 22 ноября 1994 на имя компании Prairie Machine & Parts Mfq. Ltd., описана и проиллюстрирована конвейерная система, содержащая большое количество конвейерных транспортных средств, соединенных вместе в форме состава, а также описана система рулевого управления, предназначенная для рулевого управления этим составом транспортных средств. У всех, кроме одного из транспортных средств в составе, имеется единственная пара рулевых колес, а транспортное средство на дальнем от забоя конце состава (который является концом, к которому доставляется материал месторождения) имеет два рулевых колеса. Для рулевого управления каждой из пар рулевых колес используются гидравлические цилиндры, при этом также имеется механизм рулевого управления для рулевого управления и координирования работой этих цилиндров для того, чтобы выставить углы поворота пар колес.
Вышеупомянутая известная система рулевого управления использует систему управления, содержащую датчики для определения текущего угла поворота для выбранной пары колес и для генерации электрического сигнала, указывающего на величину указанного угла, и электронную память для хранения ряда этих электрических сигналов во время движения состава. Также имеется механизм для определения расстояния, которое прошли колеса состава. Система управления устанавливает угол поворота для каждой пары колес, кроме выбранной пары, по существу равным тому же самому углу поворота, который имела выбранная пара, когда она находилась в месте, в котором расположена соответствующая следующая пара.
Одна трудность в этой известной системе состоит в том, что все оси в составе, за исключением первой и последней осей, должны быть с возможностью поворота соединены со смежными транспортными средствами передним и задним шарнирными устройствами, каждое из которых обеспечивает вертикальную ось поворота. Переднее шарнирное устройство расположено перед его соответствующей осью, а заднее шарнирное устройство расположено позади его соответствующей оси. Кроме того, эта система рулевого управления требует механизма для фиксации каждой из осей (за исключением первой и последней осей) в положении под прямым углом к продольной центральной оси либо транспортного средства, расположенного непосредственно перед соответствующей осью, либо транспортного средства, находящегося непосредственно позади этой оси. Само собой разумеется, этот тип шарнирной системы оси существенно увеличивает стоимость этих конвейерных транспортных средств. Кроме того, поскольку желательно обеспечить систему конвейерных транспортных средств, которая для работы не требует высокого потолка месторождения, эта известная система рулевого управления, которая нуждается в использовании ряда осей, на которых установлены колеса, не особенно желательна с точки зрения сокращения высоты конвейерной системы.
В индустрии подвижных ленточных конвейеров имеется потребность в создании усовершенствованного состава конвейерных транспортных средств, которым может автоматически с легкостью и надежным образом управлять оператор, например, находящийся в ведущем конце состава транспортных средств, который управляет ведущим рядом колес, который является парой колес в том конце состава, к которому перемещается состав.
Кроме того, имеется потребность в создании системы рулевого управления, которая может быть использована для управления большим количеством транспортных средств, расположенных в составе торец в торец, причем этот конвейерный состав подходит для использования в низких горнодобывающих проходах, и, в особенности, системы рулевого управления для такого состава транспортных средств, который может быть использован без необходимости установки каждой пары колес на одной оси, которая может быть повернута вокруг вертикальной оси поворота.
В соответствии с одним аспектом изобретения система рулевого управления, выполненная с возможностью управления большим количеством транспортных средств в составе, содержит выбранную пару совмещенных поперечно движущих устройств, каждое из которых содержит выполненное с возможностью рулевого управления взаимодействующее с землей колесо, выполненное также с возможностью установки на противоположных сторонах одного из транспортных средств. Система также имеет первый силовой приводной механизм для управления выбранной парой движущих устройств во время движения состава по земле, и по меньшей мере две дополнительных пары совмещенных в поперечном направлении движущих устройств, причем каждая пара включает два колеса, выполненных с возможностью рулевого управления и взаимодействующих с землей. Каждая из дополнительных пар соединена с одним или большим количеством дополнительных транспортных средств и поддерживает их. Каждое движущее устройство каждой дополнительной пары выполнено с возможностью установки на соответствующей одной из двух противоположных сторон ее соответствующего дополнительного транспортного средства. Второй силовой приводной механизм предусмотрен для рулевого управления каждой из дополнительных пар движущих устройств, и по меньшей мере один датчик угла предусмотрен для измерения выбранного межвагонного угла между указанной или каждой парой смежных транспортных средств и для генерации первого электрического сигнала, указывающего на значение этого угла. Система также содержит контроллер для управления каждым вторым силовым приводным механизмом, чтобы установить угол поворота каждой из дополнительных пар движущих устройств. Этот контроллер содержит устройство, указывающее расстояние, которое колеса в составе прошли от выбранного местоположения, и механизмы для определения текущего угла поворота каждой выбранной пары и по меньшей мере двух дополнительных пар движущих устройств, и генерации соответствующих вторых электрических сигналов, указывающих на значение этого угла. Контроллер также содержит средство для сохранения ряда углов поворота выбранной пары, измеренной механизмами определения, когда состав транспортных средств перемещается по опорной поверхности, и систему для передачи электрических сигналов рулевого управления во вторые автоматические приводные механизмы, чтобы управлять вторыми автоматическими приводными механизмами и, таким образом, управлять указанными дополнительными парами движущих устройств. Контроллер во время использования системы рулевого управления регулирует текущий угол поворота каждой дополнительной пары до требуемого угла поворота, основываясь на расстоянии, пройденном составом от выбранного местоположения, определенном текущем угле поворота соответствующей пары и измеренном межвагонном угле для соответствующей пары. Межвагонный угол для каждой пары смежных транспортных средств определяется центральными продольными осями соответствующей пары и точкой поворота, вокруг которой одна из соответствующей пары может повернуться относительно другого транспортного средства соответствующей пары в целом в горизонтальной плоскости.
В иллюстративном варианте выполнения этой системы каждое из движущих устройств содержит гидравлический двигатель для приведения в действие его соответствующего колеса, и не вращающуюся конструкцию поддержки колеса для присоединения с возможностью отсоединения движущего устройства к основной конструкции соответствующего транспортного средства, которое является конвейерным транспортным средством.
В соответствии с другим аспектом изобретения система рулевого управления предусмотрена по меньшей мере для трех транспортных средств, соединенных вместе с формированием состава. Смежные транспортные средства в составе соединены друг с другом с возможностью поворота, для выполнения поворотного движения вокруг по существу вертикальной оси, причем каждое транспортное средство имеет пару рулевых колес, установленную на нем и поддерживающую это транспортное средство. Эти пары рулевых колес содержат выбранную ведущую пару, установленную на одном из транспортных средств, расположенных в одном конце состава, причем эта ведущая пара имеет угол поворота, определяемый оператором, управляющим узлом рулевого управления ведущей пары. У каждой пары есть приводной механизм для управления соответствующей парой колес, которые установлены на противоположных сторонах транспортного средства. Система рулевого управления содержит электрический контроллер для автоматического рулевого управления всех пар колес, расположенных позади ведущей пары, причем этот контроллер содержит блок памяти для хранения измеренных данных. Также имеются датчики угла транспортного средства для измерения выбранных межвагонных углов между смежными транспортными средствами, генерации первых электрических сигналов, указывающих на значение этих углов, и передачи этих первых электрических сигналов к системе контроллера. Межвагонный угол представляет собой угол, определенный центральными продольными осями соответствующей пары смежных транспортных средств и по существу вертикальной осью, вокруг которой одна из соответствующей пары может поворачиваться относительно другого транспортного средства пары. У этой системы также имеется первый датчик угла колеса для создания электрического сигнала, указывающего на значение текущего угла поворота выбранной ведущей пары колес контроллеру. Блок памяти выполнен с возможностью хранения ряда измеренных углов поворота для выбранной ведущей пары. Каждый из сохраненных углов поворота соответствует углу поворота ведущей пары в ряде местоположений вдоль пути продвижения состава. Дополнительные датчики угла колеса могут измерять фактические углы поворота пар колес, расположенных позади ведущей пары, и обеспечивать электрические сигналы, указывающие на значение этих углов контроллеру. Контроллер во время использования системы рулевого управления регулирует фактический угол поворота для каждой ведомой пары колес до требуемого угла поворота. Контроллер вычисляет величину регулирования для каждой ведомой пары на основе следующих параметров:
(i) текущего расстояния, пройденного составом;
(ii) соответствующего одного из сохраненного набора измеренных углов поворота, причем контроллер выбирает указанный соответствующий один из углов поворота, представляющих собой угол поворота ведущей пары колес, когда ведущая пара находилась приблизительно в текущем местоположении соответствующей ведомой пары, и
(iii) текущего межвагонного угла, связанного с указанной соответствующей одной ведомой парой, причем этот межвагонный угол имеет определяющую его вертикальную ось близко к соответствующей ведомой паре.
В конкретном иллюстративном варианте выполнения угол поворота соответствующей одной из ведомых пар регулируется, только если требуемый угол поворота либо больше, чем небольшая положительная заданная величина, либо меньше, чем небольшая отрицательная заданная величина, равная небольшой положительной заданной величине, умноженной на -1.
В соответствии с дальнейшим аспектом изобретения способ рулевого управления состава из по меньшей мере трех транспортных средств, соединенных вместе, включает использование состава по меньшей мере из трех транспортных средств, содержащего первое и второе концевые транспортные средства и по меньшей мере одно промежуточное транспортное средство, причем каждое транспортное средство имеет по меньшей мере одну пару движущих устройств, установленных на нем и поддерживающих транспортное средство. Каждое движущее устройство включает рулевое колесо, выполненное с возможностью поворота вокруг по существу вертикальной оси, чтобы управлять транспортным средством. Движущие устройства каждой пары установлены на противоположных сторонах соответствующего транспортного средства. Каждое транспортное средство также содержит механизм рулевого привода с гидроусилителем, предназначенный для поворота колес пары вокруг их соответствующих вертикальных осей, и контроллер, предназначенный для управления системой рулевого привода с гидроусилителем, чтобы управлять транспортным средством. Смежные транспортные средства состава соединяют друг с другом с возможностью поворота, для выполнения поворотного движения вокруг по существу вертикальной оси поворота транспортного средства. Способ включает перемещение состава по земле в требуемом направлении к одному из концевых транспортных средств и рулевое управление ведущей парой колес на одном концевом транспортном средстве до требуемого угла поворота. Этот требуемый угол поворота измеряют на непрерывной или частой периодической основе, при этом обеспечивают первые сигналы, которые указывают на значение этих углов поворота контроллеру. Ряд этих требуемых углов поворота сохраняют по мере перемещения состава по земле. Текущий угол поворота для каждой пары колес, ведомых за ведущей парой колес относительно направления движения состава, также измеряют на непрерывной или частой периодической основе. Указание на расстояние, пройденное составом от выбранного местоположения, передают контроллеру. Также контроллеру предоставляют считываемые показания межвагонных углов между парами смежных транспортных средств. Каждый межвагонный угол определяется центральными продольными осями соответствующей пары транспортных средств и оси поворота транспортного средства соответствующей пары. Корректировки угла поворота вычисляют для ведомой пары колес посредством контроллера по мере перемещения состава, причем эти корректировки угла поворота являются функцией следующего:
(i) расстояния, пройденного составом транспортных средств;
(ii) сохраненных требуемых углов поворота ведущей пары транспортных средств, когда контроллер выбирает сохраненный угол поворота для каждой ведомой пары, которая представляет собой требуемый угол поворота, когда ведущая пара колес была приблизительно в том же самом местоположении, где в настоящее время расположена соответствующая ведомая пара;
(iii) текущего межвагонного угла, связанного с соответствующей ведомой парой, причем этот межвагонный угол имеет определяющую его вертикальную ось, расположенную между соответствующей ведомой парой; и
(iv) текущего угла поворота каждой пары колес, расположенных позади ведущей пары колес.
В иллюстративной версии этого способа контроллер содержит программируемый логический контроллер (ПЛК) в каждом из транспортных средств, причем эти ПЛК включают ведущий ПЛК и большое количество интеллектуальных ведомых ПЛК.
Эти и другие аспекты раскрытой системы рулевого управления и способа рулевого управления для управления большим количеством транспортных средств в составе и, в особенности, составе конвейерных механизмов, будут более очевидны для специалистов в этой области техники из следующего детального описания, взятого совместно с сопровождающими чертежами.
На чертежах:
Фиг.1 представляет собой вид сверху иллюстративного варианта выполнения промежуточного подвижного конвейерного механизма или транспортного средства, управляемого системой рулевого управления согласно настоящему изобретению;
Фиг.2 представляет собой вид сбоку промежуточного конвейерного транспортного средства, изображенного на Фиг.1;
Фиг.3 представляет собой вид снизу конвейерного механизма, изображенного на Фиг.1 и 2;
Фиг.4 представляет собой частичный разрез на виде сверху, взятый по линии IV-IV, изображенной на Фиг.2;
Фиг.5 представляет собой вид в аксонометрии, полученный сверху от конца ведомого шкива конвейерного механизма, причем этот вид показывает концевую секцию механизма, включая его два колеса;
Фиг.6 представляет собой частичный разрез на виде сверху, взятый по линии VI-VI, изображенной на Фиг.1, причем этот вид показывает подробности расположения рулевого привода с гидроусилителем для каждого колеса;
Фиг.7 представляет собой подробный вид сверху сборки узла левостороннего колеса транспортного средства, изображенного на Фиг.1 и 2, причем на этом виде в целях иллюстрации само колесо не показано;
Фиг.8 представляет собой подробный частичный разрез на виде сверху, взятый по линии VIII-VIII, изображенной на Фиг.7;
Фиг.9 представляет собой подробный вид с конца сборки колесного узла, изображенного на Фиг.7, причем этот вид взят с левой стороны Фиг.7, и показывает колесо, установленное на сборке;
Фиг.10 представляет собой подробный частичный разрез на виде сверху, взятый по линии Х-Х, изображенной на Фиг.9;
Фиг.11 представляет собой подробный вид в аксонометрии сварной конструкции монтажной пластины, используемой для поддержки каждого колеса и его гидравлического двигателя;
Фиг.12 представляет собой подробный вид в аксонометрии, иллюстрирующий выполненный с возможностью поворота элемент поддержки двигателя, установленный смежно с каждым колесом;
Фиг.13 представляет собой вертикальный разрез, взятый по линии XIII-XIII, изображенной на Фиг.15, иллюстрирующий взаимодействие роликов узла сцепки с искривленной направляющей;
Фиг.14 представляет собой подробный вид, показывающий разрез искривленной направляющей в соответствии с иллюстративным вариантом выполнения;
Фиг.15 представляет собой вид снизу, изображающий часть искривленной направляющей и узла сцепки, установленного для совершения перемещения качением на направляющей;
Фиг.16 представляет собой подробный вертикальный разрез, взятый по линии XVI-XVI, изображенной на Фиг.15;
Фиг.17 представляет собой вид сверху корпуса, поддерживающего ролик, который является частью узла сцепки;
Фиг.18 представляет собой вертикальный разрез корпуса, поддерживающего ролик, взятый по линии XVIII-XVIII, изображенной на Фиг.17;
Фиг.19 представляет собой вид в аксонометрии корпуса, поддерживающего ролик, изображенного на Фиг.17, взятый сверху и от конца шарнирного пальца;
Фиг.20 представляет собой вид в аксонометрии конструкции шарнирной сцепки, которая с возможностью поворота соединена с поддерживающим корпусом, изображенным на Фиг.17, причем эта конструкция сцепки изображена сверху и с ее внутренней стороны;
Фиг.21 представляет собой вид с внутренней стороны конструкции сцепки, изображенной на Фиг.20;
Фиг.22 представляет собой вертикальный разрез конструкции сцепки, взятый по линии XXII-XXII, изображенной на Фиг.21;
Фиг.23 представляет собой вид в аксонометрии узла датчика межвагонного угла, выполненного с возможностью установки на сцепном устройстве;
Фиг.24 представляет собой вид снизу узла датчика, изображенного на Фиг.23;
Фиг.25 представляет собой осевой разрез узла датчика, взятый по линии XXV-XXV, изображенной на Фиг.24;
Фиг.26 представляет собой частичный вид снизу конвейерного механизма, показывающий конец, где установлен ведомый шкив, и сцепное устройство;
Фиг.27 представляет собой подробный вид сверху сцепного устройства, установленного на одном конце подвижного конвейерного механизма, и показывает смежную концевую секцию смежного конвейерного механизма, присоединенного к этому механизму;
Фиг.28 представляет собой вертикальный разрез, взятый по линии XXVIII-XXVIII, изображенной на Фиг.27, показывающий одно из двух соединений шарнирного пальца, соединяющих два указанных конвейерных механизма;
Фиг.29 представляет собой вид сбоку загрузочной тележки транспортного средства, которая может быть расположена в загрузочном конце состава конвейерных транспортных средств;
Фиг.30 представляет собой вид сбоку разгрузочной тележки транспортного средства, которая может быть расположена в разгрузочном конце состава конвейерных транспортных средств;
Фиг.31 представляет собой вид сверху разгрузочной тележки транспортного средства, изображенной на Фиг.30;
Фиг.32 представляет собой схематическую иллюстрацию сети программируемых логических контроллеров (ПЛК) для состава конвейерных транспортных средств;
Фиг.33 представляет собой принципиальную электрическую схему, иллюстрирующую цепи, соединенные с каждым ПЛК для управления каждым конвейерным транспортным средством, и для обеспечения поворота этого транспортного средства в требуемом направлении;
Фиг.34А и 34В представляют собой две части блок-схемы, иллюстрирующей логику рулевого управления, используемую для управления каждой парой колес, расположенных позади ведущей парой колес; и
Фиг.35А и 35В представляют собой левые и правые части гидравлической схемы, изображающей гидравлические системы, используемые для приведения в действие и управления каждым конвейерным транспортным средством.
Основные элементы промежуточного конвейерного транспортного средства, которое может управляться с помощью настоящей системы и способа рулевого управления, наряду с другими транспортными средствами, присоединенными к указанному, проиллюстрированы на Фиг.1-5 чертежей. Проиллюстрированное промежуточное низкопрофильное конвейерное транспортное средство 10 изображено без обычного гибкого ленточного конвейера, расположение которого лишь указано штрихпунктирными линиями в целях иллюстрации. Этот ленточный конвейер 12 представляет собой бесконечный ленточный конвейер и может иметь стандартную конструкцию в зависимости от типа материала, переносимого конвейерной системой. Проиллюстрированное иллюстративное транспортное средство предназначено для использования в качестве промежуточной тележки, которых может быть пять, десять или больше в составе конвейерных транспортных средств, подобных составу, проиллюстрированному и описанному в патенте США №5366059. Следует понимать, что в дополнение к большому количеству промежуточных конвейерных транспортных средств, шарнирно соединенных торец в торец, может также быть предусмотрено загрузочное конвейерное транспортное средство 540, изображенное на Фиг.29, которое расположено в конце состава, смежном с горнодобывающим механизмом, и разгрузочное конвейерное транспортное средство 542, изображенное на Фиг.30 и 31, расположенное на противоположном конце состава, который упоминается как дальний от забоя конец, то есть конец, к которому состав транспортных средств поставляет материал. Узел загрузочной тележки 540 может быть выполнен аналогичным образом, что и проиллюстрированный узел промежуточной тележки 10, за исключением того, что его не обязательно снабжать сцепным механизмом в его ближайшем к забою конце, или бункерном конце, так как не нужно присоединять этот конец к другому конвейерному транспортному средству. Также у загрузочной тележки обычно имеется больший бункер 544, чтобы получать руду от горнодобывающей машины. Что касается разгрузочного конвейерного транспортного средства 542, оно снабжено двумя парами совмещенных в поперечном направлении колесных узлов 546, 548, а не одной парой этих колесных узлов, описанных в дальнейшем. Однако колесные узлы на разгрузочной тележке могут быть выполнены тем же самым образом, как описано в дальнейшем, включая их механизм рулевого управления и их гидравлический привод. Разгрузочная тележка также снабжена выполненным с возможностью поворота поперечным конвейером 550 для того, чтобы разгружать материал на постоянный или неподвижный конвейер в шахте. Поперечный конвейер и его использование описаны и проиллюстрированы в патенте США №5366059. Подробное описание его поперечного конвейера здесь считается не обязательным, поскольку системы поперечного конвейера известны в индустрии подвижных конвейеров.
Обращаясь теперь к промежуточному конвейерному транспортному средству 10, видно, что это транспортное средство имеет конвейерный механизм 14, который содержит удлиненную, по существу горизонтальную конструкцию 16, и ряд отделенных друг от друга конвейерных роликов 18, установленных на горизонтальной конструкции 16 и выполненных с возможностью поддержки во время вращения верхней ветви непрерывного ленточного конвейера 12, проходящего между противоположными концевыми секциями транспортного средства. Ролики 18 могут иметь стандартную конструкцию, доступную от поставщиков запчастей конвейера. Каждый проиллюстрированный ролик включает три металлических ролика 20, которые соединены вместе торец в торец с возможностью поворота их центральными валами. Наружный конец каждого наружного ролика присоединен цепью 22 (см. Фиг.5) к вертикальной опорной стойке 24, установленной на основном, проходящем в длину элементе конструкции основной конструкции 16. Высота каждой пары стоек 24 изменяется как показано на чертеже, чтобы постепенно увеличивать высоту роликов. В дополнение к цилиндрическим, выполненным с возможностью вращения металлическим роликам 20 могут также быть предусмотрены ударопрочные ролики 26 известной конструкции, помещенные ниже U-образного бункерного элемента 28. Следует понимать, что ударопрочный ролик помогает поглотить удар от материала, падающего на ленточный конвейер в этом месте.
Конвейерный механизм 14 также содержит узел ведомого шкива, установленный смежно с одним концом конвейерного механизма на горизонтальной конструкции 16 и имеющий выполненный с возможностью вращения ведомый шкив, обозначенный номером 32 позиции. Дополнительные подробности конструкции узла ведомого шкива показаны дальше со ссылкой на Фиг.5 и 26. Конвейерный механизм 14 также содержит узел 34 ведущего шкива, установленный смежно со вторым концом конвейерного механизма напротив первого конца, где расположен ведомый шкив. Узел ведущего шкива содержит выполненный с возможностью вращения ведущий шкив 36, который известным образом может быть выполнен с захватываемой цилиндрической поверхностью, которая позволяет узлу ведущего шкива приводить в движение ленточный конвейер 12. Имеется также электродвигатель 38, который можно считать частью узла ведущего шкива, так как он вращает ведущий шкив 36, чтобы перемещать ленточный конвейер и, таким образом, транспортировать материал от ведомого шкива к ведущему шкиву. Рядом с передним шкивом может быть установлен скребок 40 известной конструкции, чтобы способствовать поддержанию в чистоте переносящей поверхности ленты. Смежно с передним шкивом в конце дальнего от забоя конце транспортного средства установлен бункер 42 для материала, который помогает направлять материал на ленточный конвейер следующего конвейерного транспортного средства состава. Чтобы получить низкопрофильное конвейерное транспортное средство 10, предусмотрен механизм 44 шарнирной сцепки в ближнем к забою конце транспортного средства. Этот механизм сцепки включает искривленную стальную направляющую и сцепное устройство 48 качения, имеющее два набора выполненных с канавками роликов, расположенных в местах 50 и 52 на двух противоположных сторонах V-образной направляющей 46. Два шарнирных пальца 54 тележки расположены на противоположных сторонах сцепного устройства 48, которое может поворачиваться вокруг центральной продольной оси транспортного средства благодаря центральному шарнирному пальцу 56 (см. Фиг.13). Рядом с противоположным концом ведущего шкива тележки расположены два держателя 60 шарнирного пальца, по одному на каждой стороне конструкции 16.
Конвейерное транспортное средство 10 содержит пару совмещенных в поперечном направлении колесных узлов, обозначенных в целом номером 62 позиции, предназначенных для поддержания и перемещения конвейерного транспортного средства. Каждый из этих колесных узлов по отдельности соединен с горизонтальной конструкцией 16, включая любые выступающие части. В частности, каждый колесный узел соединен с соответствующей проходящей в длину стороной конструкции. Каждый колесный узел имеет свое собственное жесткое колесо, причем колесо на левой стороне обозначено номером 64 позиции, а колесо на правой стороне обозначено номером 66 позиции. Как объяснено более подробно далее, каждое колесо 64, 66 установлено с возможностью поворотного движения вокруг по существу вертикальной оси поворота с целью рулевого управления, то есть рулевого управления транспортным средством 10. В иллюстративном варианте выполнения конвейерного транспортного средства каждый колесный узел содержит обычный гидравлический двигатель 68, ясно изображенный на Фиг.8. Этот двигатель используется для поворота или приведения в действие колеса соответствующего колесного узла. Кроме того, каждый колесный узел включает не вращающуюся опорную конструкцию, обозначенную в целом номером 70 позиции, для присоединения с возможностью отсоединения колесного узла к горизонтальной конструкции, включая любую выступающую часть этой конструкции. Левосторонний колесный узел 62, в котором колесо снято, проиллюстрирован на Фиг.7, а вместе с колесом проиллюстрирован на Фиг.8 и 9. На Фиг.7 также изображен механизм рулевого привода с гидроусилителем, или средство 72 рулевого привода с гидроусилителем, предназначенное для рулевого управления колесом этого колесного узла. Проиллюстрированный механизм рулевого привода с гидроусилителем включает гидравлический возвратно-поступательный привод, имеющий гидравлический цилиндр 74 и тягу 76 привода, выполненную с возможностью скольжения в цилиндре. Рычаг 77 рулевого управления имеет L-образную форму и прочно прикреплен к одному концу верхней части опорного элемента 144 двигателя (см. Фиг.12), и присоединен с возможностью поворота на его другом конце к тяге 76 посредством болта и гайки 80 (см. Фиг.9). Закрытый конец цилиндра 74 присоединен с возможностью поворота посредством выступов 82 к концу проходящей горизонтально удлиненной части 84 кронштейна, которая является частью монтажной пластины 86 колесного узла. Комбинация 88 гайки и болта шарнирно соединяют короткую соединительную пластину 90, которая прочно прикреплена к концу цилиндра к выступам 82. Тяга 76 привода может быть снабжена сферическим подшипником 92, который соединен посредством резьбы с наружным концом тяги. Этот подшипник соединен с рычагом 77 рулевого управления гайкой и болтом 80. Каждый гидравлический возвратно-поступательный привод 72 в иллюстративном варианте выполнения содержит средство определения текущего угла поворота пары колес и генерации электрического сигнала, указывающего на значение этого угла ПЛК транспортного средства. В одном конкретном варианте выполнения датчик угла поворота представляет собой датчик линейного положения, продаваемый под товарным знаком Positek, при этом этот датчик обозначен номером 75 позиции на Фиг.33. Этот датчик установлен на гидравлическом цилиндре 74, при этом величина создаваемого сигнала зависит от величины выдвижения тяги 76.
В дополнение к части 84 кронштейна плоская монтажная пластина 86 содержит основную часть 96, изображенную на Фиг.6. Эта основная часть пластины имеет в целом прямоугольную форму, за исключением вырезанных нижних уголков 98. Часть 84 кронштейна проходит горизонтально от верхнего угла основной части 96 пластины. Преимущество, обеспечиваемое частью 84 кронштейна, состоит в том, что гидравлический цилиндр может тогда быть установлен с возможностью поворота на той же самой монтажной пластине 86, что и колесо, и его гидравлический двигатель 68. Как можно видеть из Фиг.6 и 11, каждый колесный узел 62 и, в особенности, его монтажная пластина 86 (которая является частью опорной конструкции колеса), выполнен с большим количеством отверстий, обозначенных в целом номером 100 позиции, которые предусмотрены для введения крепежных средств, предпочтительно болтов, используемых для крепления соответствующего колесного узла к конструкции 16, включая любые выступающие части. С этой целью через отстоящие друг от друга отверстия 104 предусмотрено выполненное с возможностью вставления большое количество крепежных средств 102, четыре из которых могут быть видны на Фиг.6. Имеется большое количество отверстий 104, выполненных в каждой проходящей в длину стороне конструкции 16, а также, необязательно, в выступающих пластинах, выполненных с возможностью присоединения к основным элементам конструкции, могут быть предусмотрены дополнительные отверстия. Отверстия 100, выполненные в монтажной пластине 86, расположены в противоположных концевых секциях монтажной пластины, как ясно показано на Фиг.11. Проиллюстрированное расположение отверстий позволяет регулировать высоту каждого колесного узла относительно горизонтальной конструкции 16 между одним из двух возможных положений, но специалистам в этой области техники должно быть понятно, что при выполнении дополнительных отверстий 104, например, на каждом продольном элементе конструкции или выступающей пластине, возможно предусмотреть больше, чем два возможных положения высоты каждого колесного узла. В положении колесного узла, проиллюстрированного на Фиг.6, колесный узел 62 находится на своей максимальной высоте относительно конструкции 16. В этом положении полная высота конвейерного транспортного средства будет минимальной высотой, которая в иллюстративном варианте выполнения составляет только четыре фута, или сорок восемь дюймов (сто двадцать один сантиметр), по сравнению с конвейерными транспортными средствами предшествующего уровня техники, такими как описаны и проиллюстрированы в патенте США №5366059, которые имели полную высоту, равную шести футам, или семидесяти двум дюймам (сто восемьдесят три сантиметра). В этом положении колесных узлов в иллюстративном варианте выполнения дорожный просвет, обеспеченный под транспортным средством, составляет шесть дюймов (пятнадцать сантиметров). Однако, когда горнодобывающие условия требуют большего дорожного просвета, при условии, что эта область шахты имеет адекватный потолок или рабочую высоту для конвейерной системы, колесные узлы могут быть перемещены во второе положение, которое может обеспечить дополнительные четыре дюйма (десять сантиметров) дорожного просвета, давая в общей сложности десять дюймов (двадцать пять сантиметров). В этом случае полная высота конвейерного транспортного средства составляет пятьдесят два дюйма (сто тридцать два сантиметра).
Обратимся теперь к опорной конструкции 70 колеса, показанной на Фиг.8 и 11. Видно, что опорная конструкция колеса содержит верхний и нижний горизонтально проходящие опорные кронштейны 120, 122 для колеса, оба с закругленными дистальными концами. Верхний кронштейн 120 может быть выполнен из цельной стальной пластины, приваренной к верху монтажной пластины 86, а также иметь круглое отверстие 122 для размещения верхнего элемента шарнирного пальца. Как проиллюстрировано, нижний опорный кронштейн 122 может быть выполнен из двух коротких пластинчатых элементов 124, 126, которые приварены вместе в месте, обозначенном номером 128 позиции, и которые проходят под тупым углом друг к другу, как показано на Фиг.8. Прочность и жесткость соединения между скошенной пластиной 124 и пластиной 86 могут быть усилены двумя вертикально проходящими клиньями 130, которые приварены к этим пластинам. Верхний шарнирный палец 132 установлен в отверстии 122 и соединен с верхним кронштейном 120 шестью винтами 134. Шарнирный палец может быть дополнен центральным проходом (не показан), который проходит вниз от масленки 136 Зерка. Также имеется нижний шарнирный палец 138, имеющий усеченный верхний конец, проходящий в круглую выемку 140, выполненную в закругленной концевой секции нижнего опорного кронштейна 122.
Чтобы поддерживать колесо и его гидравлический двигатель 68 с возможностью поворота, предусмотрен по существу кольцевой опорный элемент 144 для двигателя, показанный на Фиг.12. Этот опорный элемент имеет круглую выемку 146, выполненную на его верхней стороне, при этом в эту выемку проходит усеченная секция заднего конца верхнего шарнирного пальца 132. В этой выемке установлен сферический угловой контактный подшипник 148, который в одном варианте выполнения имеет выточку с размерами 1 и 3/4 дюйма (4,45 см), и имеет наружный диаметр 2 и 13/16 дюйма (7,14 см). Подходящая изоляция, такая как изоляция 150 Chesterton Super Wiper, предохраняет этот подшипник и проходит вокруг его верхнего края. Точно также, вокруг усеченной верхней части нижнего шарнирного пальца проходит сферический угловой контактный подшипник 152, который изолирован посредством изоляции 154 Chesterton Super Wiper. Нижний шарнирный палец может быть смазан смазкой через масленку 156 Зерка.
Возвращаясь к Фиг.12, можно отметить, что опорный элемент 144 имеет нижний выступ 160, который приварен к кольцевой части опорного элемента 144 и имеет круглое отверстие 162. Нижний шарнирный палец проходит через отверстие 162 от основания и с возможностью отсоединения присоединен к выступу 160 шестью винтами 164, которые проходят через выступ, проходящий вокруг основания этого шарнирного пальца. Между выступом 160 и кольцевой частью опорного элемента 144 образовано пространство 166, в которое вставлена закругленная концевая часть горизонтальной пластины 126. Таким образом, опорный элемент 144 с возможностью поворота поддерживается снизу.
Из Фиг.12 также можно заметить, что опорный элемент 144 имеет проходящий радиально вовнутрь соединительный выступ 170, причем этот выступ выполнен с рядом крепежных отверстий 172. Как показано на Фиг.10, для прикрепления гидравлического двигателя 68 к выступу 170, наряду со связанной с ним планетарной коробкой передач 176 могут быть использованы шесть винтов 174. Планетарная коробка передач имеет кольцевой фланец 178 вращения, который прикреплен девятью гексагональными гайками 180 к круглой пластине 182, формируя центральную часть втулки колеса. Гайки накручены на стойки 184, которые видны на Фиг.7, причем эти стойки проходят через фланец вращения на коробке передач. Подразумевается, что левые и правые колеса 64, 66 представляют собой твердые резиновые колеса и, в одном варианте выполнения, каждое колесо имеет размеры 10"×24" (25,4×61 см) в диаметре. Левые и правые колеса 64, 66 соединены вместе соединительной тягой 190 рулевого управления, показанной на Фиг.4, которая гарантирует, что колеса поворачиваются одновременно в одну и ту же сторону. Она присоединена в каждом конце к рычагу 78 соединительной тяги соответствующего колеса посредством болта с контргайкой 192 с нейлоновой вставкой.
Следует понимать, что гидравлический двигатель для каждого колесного узла снабжается гидравлической жидкостью под давлением через гидравлические линии и детали стандартной конструкции, которые доступны и известны в этой области техники. Большинство этих линий для простоты не изображены на чертежах. Некоторые из этих линий обозначены номером 194 позиции и изображены на Фиг.10. Соединяющие детали для этих линий могут поддерживаться маленьким кронштейном 196, изображенным на Фиг.12. Следует понимать, что сам гидравлический двигатель и его коробка передач имеют стандартную конструкцию и соответственно детальное описание здесь считается ненужным.
Различные другие признаки описанного иллюстративного низкопрофильного конвейерного транспортного средства, которое показано на Фиг.1-3, включают пластмассовый энергетический канал 200, через которую электрические кабели и провода подаются для работы транспортного средства, и направляющую 202 энергетического канала, которая помогает поддерживать движение энергетического канала. На левой стороне конструкции установлена электрическая соединительная коробка 204 стандартной конструкции, которая имеет дверцу 206. На той же самой стороне конструкции установлен электродвигатель 208, который вращает первый и второй гидравлические насосы 210 и 212, причем первый насос 210 обычно приводит в действие гидравлические двигатели для колес, а второй двигатель 212 обычно приводит в действие другие гидравлические элементы транспортного средства. На правой стороне транспортного средства в месте, обозначенном номером 214 позиции, предусмотрены два стандартных фильтра для гидравлической системы. Выше этих фильтров установлена соединительная коробка 216. Рядом с насосом 212 в месте, обозначенном номером 218 позиции, может быть предусмотрен третий гидравлический фильтр. На двух продольных главных элементах конструкции 16 или между ними и рядом с одной из поперечных конструкций 220 расположен резервуар 222 с гидравлической текучей средой. Другая соединительная коробка для электрических элементов, содержащая соединители, предусмотрена на правой стороне в месте, обозначенном номером 224 позиции. Установленный сбоку электрический двигатель 38 для ведущего шкива соединен с коробкой 226 передач конвейера, которая содержит ведомый вал с валом ведущего шкива. В одном варианте выполнения двигатель 38 представляет собой 7,5-кВаттный или 10-л.с.-двигатель. Также на правой стороне транспортного средства на продольном элементе конструкции установлена магистраль 230 гидравлического узла, которая защищена кожухом или протектором 232. На той же самой стороне конструкции рядом с двигателем 38 находится пульт управления, содержащий программируемый логический контроллер для управления работой и поворотом транспортного средства, причем пульт обозначен номером 234 позиции. Известным образом транспортное средство 10 может быть также снабжено водными распылителями, два из которых обозначены номерами 240, 241 позиций. Водные шланги (не показаны) соединены с распылителями, чтобы уменьшать уровень пыли, создаваемый конвейерной системой.
На Фиг.13 и 15 проиллюстрирован шарнирный механизм или механизм 44 шарнирной сцепки, выполненный с возможностью поворотного соединения подвижного конвейерного механизма, изображенного на Фиг.1 и 2, в его ближнем к забою конце (также иногда упоминаемый здесь, как его первый конец) к смежной концевой секции другого подвижного конвейерного механизма, которая может быть выполнена тем же самым образом, что и механизм или транспортное средство, изображенное на Фиг.1 и 2. Как указано выше, этот шарнирный механизм содержит искривленную направляющую 46, которая может иметь однородное поперечное сечение и, в иллюстративной версии, имеет поперечное сечение, изображенное на Фиг.14. Искривленная направляющая согнута по горизонтальной круговой дуге, как ясно показано, например, на Фиг.5, причем эта дуга имеет центр кривизны, расположенный на полпути между движущими устройствами, которые представляют собой колеса 64, 66. Этот центр кривизны обозначен буквой С на Фиг.3. Центр кривизны находится на общей оси вращения двух колес, когда эти два колеса размещены для перемещения конвейерного механизма в прямолинейном направлении. Эта ось вращения обозначена буквой А на Фиг.26. Направляющая жестко установлена на опорной конструкции 16, которая содержит искривленную бамперную конструкцию 350, имеющую прямоугольное поперечное сечение, причем эта конструкция удлиняет длину направляющей. Направляющая, которая предпочтительно изготовлена из обработанной твердой стали, может быть приварена к бамперной конструкции. Каждый конец направляющей может быть снабжен прямоугольной стопорной пластиной 352, закрепленной винтами (например, тремя винтами), закрученными в отверстия, выполненные в каждом конце направляющей. В пластине 352 может быть предусмотрено дополнительное отверстие (не показано), чтобы зафиксировать его соответствующий конец роликовой цепи 374 (описана ниже). Иллюстративная форма направляющей имеет поперечное сечение такое, как изображено на Фиг.14. Направляющая имеет две противоположные взаимодействующие с роликами стороны 354, 356, причем сторона 354 находится на внутренней стороне направляющей и образует вогнутую кривую, а сторона 356 находится на наружной стороне и образует выпуклую кривую. Каждая из этих сторон в показанной иллюстративной версии взаимодействует с тремя роликами, причем один из роликов взаимодействует со стороной 356, показанной в поперечном сечении в месте, обозначенном номером 358 позиции, изображенном на Фиг.13. Другой ролик 360 частично изображен на Фиг.13 и является одним из этих трех роликов, взаимодействующих со стороной 354. Эти три ролика, взаимодействующие со стороной 356, образуют первый набор роликов, а три ролика, взаимодействующие со стороной 354, образуют второй набор роликов. Следует отметить, что направляющая 46 захватывается и удерживается между первым и вторым наборами роликов. Ролики обоих наборов имеют V-образные канавки 362, выполненные по окружности. Использование трех роликов в каждом наборе помогает всегда поддерживать узел сцепки правильно ориентированным на направляющей.
Обратимся теперь к иллюстративному поперечному сечению, изображенному на Фис.14. На наружной выпуклой стороне 356, которая обращена к смежному концу подвижного конвейерного механизма, имеется верхняя скошенная поверхность 364, которая проходит под углом в 45 градусов к вертикальной средней линии Z направляющей. Наружная поверхность также имеет нижнюю скошенную поверхность 366, которая проходит под углом в 45 градусов к оси Z, а также может иметься короткая вертикальная поверхность, предусмотренная в месте, обозначенном номером 36 позиции 8. Сторона 354, взаимодействующая с внутренними роликами, также имеет скошенные поверхности в 370 и 371, проходящие под углом в 45 градусов. Эти поверхности могут быть образованы стандартным процессом механической обработки. Также в элементе направляющей выполнена прямоугольная канавка 372, которая может удлинить элемент направляющей на стороне 356. Цель этой канавки состоит в том, чтобы приспособить длину роликовой цепи 374, используемой совместно с датчиком угла, описанным ниже.
Обратимся теперь к конструкции корпуса опорной конструкции 376 ролика, проиллюстрированной на Фиг.17-19. Этот корпус используется для поддержки с возможностью вращения двух вышеупомянутых набора роликов, которые содержат направляющую 46. Этот корпус включает горизонтально проходящую опорную пластину 378, которая может иметь в целом трапециевидную форму и выполнена с шестью круглыми отверстиями 380, в которых расположены проходящие вверх валы 381 роликов. Если требуется, вокруг каждого отверстия может быть выполнена неглубокая круглая выемка 382, чтобы частично вместить гайку 382, которая показана на Фиг.13 и навинчена на резьбу вала ролика посредством подходящей резьбы (не показана). Каждый узел ролика представляет собой стандартный ролик, и поэтому подробно не показан. Опорный корпус также имеет вертикальную опорную пластину 384 для шарнирного пальца, которая прочно соединена с краем опорной пластины 378 ролика. Эти две пластины могут быть приварены вместе в месте, обозначенном номером 386 позиции. Проходящий горизонтально центральный шарнирный палец 56 установлен в круглом отверстии, выполненном центрально в опорной пластине 384. Палец 56 вблизи своего внутреннего конца имеет проходящий по окружности фланец 388, причем этот фланец упирается в опорную пластину 384. Внутренний конец шарнирного пальца может быть приварен к пластине 384. Чтобы усилить опорный корпус 376, к нему в местах, обозначенных номерами 390, 392 позиций, могут быть приварены две прямоугольные боковые пластины. Опорная плита 394 может быть приварена к верхнему краю пластины 384 и выполнена так, чтобы образовывать тупой угол. В наружном конце этой опорной пластины могут быть выполнены четыре соединительных отверстия 396. Кронштейн 394 используется для соединения с возможностью отсоединения одного конца вышеупомянутого энергетического канала 200. Если требуется, закрывающая пластина 395 (см. Фиг.26) может быть присоединена к основанию опорного корпуса 376 посредством винтов 400, вставленных через закрывающую пластину и навинченных в отверстия 402. Следует понимать, что каждый ролик снабжен внутренними подшипниками (не показаны) стандартной конструкции, которые позволяют ролику свободно вращаться вокруг его вала.
Обращаясь теперь к конструкции механизма поворотной сцепки или конструкции 44 сцепки, проиллюстрированной отдельно на Фиг.20-22, видно, что эта конструкция с возможностью поворота соединена с опорным корпусом 376 посредством шарнирного пальца 56. Шарнирный палец проходит в проход, который выполнен в поперечном центре конструкции. Следует понимать, что проход 404, который имеет круглое поперечное сечение, проходит в радиальном направлении относительно радиуса направляющей 46. Конструкция сцепки содержит центральный блок 406, в котором выполнен проход, две трубчатых части 408, 410 кронштейна и две концевых части 412, 414, расположенные на противоположных сторонах шарнирного пальца и отстоящие от него, причем эти концевые части выполнены с возможностью шарнирного присоединения к смежной концевой части второго или другого подвижного механизма (аналогичного или такого же, что и проиллюстрированный механизм, изображенный на Фиг.1 и 2) во время использования устройства сцепки. Каждая часть 408, 410 кронштейна может быть выполнена из горизонтальной верхней пластины 416, аналогичной горизонтальной нижней пластины 418, внутренней прямоугольной пластины 420 и прямоугольной вертикальной наружной пластины 422 (см. Фиг.5). Эти пластины могут быть изготовлены из стальной пластины толщиной 3/4 дюйма (19,5 мм) и могут быть прочно соединены посредством сварки. Каждая концевая часть 412, 414 может быть выполнена из согнутой стальной пластины, образуя тупой угол, как показано на Фиг.20. Используемая пластина может быть стальной пластиной толщиной один дюйм (25,4 мм), и ее соединение с ее частью кронштейна может быть усилено треугольным фиксатором или клином 424. Круглое отверстие 426 выполнено в закругленном конце каждой концевой части, чтобы вместить соответствующий один из пальцев 56 сцепки тележки, показанных на Фиг.1, 2 и 5. Таким образом, сцепное устройство, выполненное в соответствии с изобретением, может быть с возможностью поворота соединено со смежным вторым подвижным механизмом посредством этих пальцев сцепки, которые обеспечивают относительное поворотное перемещение вокруг горизонтальной оси между двумя подвижными механизмами или подвижными конвейерами.
Как показано на Фиг.13 и 22, в верхней части блока 406 может быть сформирован проход 430 для смазочного материала, а фитинг для смазочного материала или масленка Зерка установлена в блоке в наружном конце этого прохода. Вокруг шарнирного пальца проходят стекловолоконные втулки 432, причем одна из них расположена рядом с фланцем 388, а другая расположена рядом с наружным концом прохода 404 пальца. Кроме того, между внутренним концом блока 406 в неглубокой, круглой выемке 436 и фланцем 388 может быть зажат стекловолоконный подшипник 434 осевого давления. Сцепной механизм 44 удерживается на центральном шарнирном пальце 56 посредством стопорной пластины 435, имеющей форму тора, которая может иметь толщину 7/8 дюйма (22 мм) и центральное отверстие диаметром 1 и 13/16 дюйма (46 мм). Как пластина 436, так и шарнирный палец имеют совмещенные отверстия, чтобы в них можно было вставить установочный штифт 438, функцией которого является предотвращение поворота пластины относительно пальца. Пластина 436 удерживается на месте посредством винта 440 длиной 3 и 1/2 дюйма (89 мм), который проходит в отверстие под винт, выполненное в центре шарнирного пальца. Таким образом, видно, что механизм 44 сцепки может свободно поворачиваться вокруг горизонтальной поворотной оси, образованной шарнирным пальцем, обеспечивая, тем самым, относительное перемещение вокруг этой поворотной оси между смежными соединенными подвижными конвейерными транспортными средствами.
Для использования с автоматической системой рулевого управления для состава этих подвижных конвейерных механизмов типа, описанного выше, для системы рулевого управления может быть желательно знать межвагонный угол между смежными тележками в составе. Вследствие того, что настоящий подвижный конвейерный механизм не имеет никакого шарнира, расположенного на поворотной оси между смежными тележками (другими словами, есть только виртуальная точка поворота, расположенная на полпути между двумя колесами описанного здесь механизма), совместно с поворотным механизмом, выполненным в соответствии с настоящим изобретением, может быть предусмотрен специальный датчик межвагонного угла, так что электрический сигнал, который является показателем межвагонного угла, может быть передан рулевому управлению для конвейерного состава. Иллюстративная форма такого датчика изображена на Фиг.15, 16 и 23-25. Этот датчик, обозначенный в целом номером 450 позиции, в состоянии определить угол между центральной продольной осью иллюстрированного подвижного механизма 10 и центральной продольной осью смежного подвижного конвейерного механизма, который может быть выполнен тем же самым или аналогичным образом, что и проиллюстрированный механизм. Полная система рулевого управления для состава таких транспортных средств или механизмов снабжена одним из этих датчиков угла, расположенных между каждой парой смежных транспортных средств. Хотя это и не показано на Фиг.23, датчик содержит вышеупомянутую натянутую роликовую цепь 374, установленную на направляющей 46. Следует понимать, что эта цепь образует серию взаимодействующих со звездочками углублений, выполненных вдоль одной стороны направляющей по меньшей мере вдоль большей части длины направляющей. Эти углубления выполнены с помощью элементов, формирующих углубления (то есть пальцы цепи). Углубления также могут быть образованы механической обработкой их непосредственно в элементе направляющей. Другой главный компонент датчика - это преобразователь 452 вращательного положения, который установлен на механизме 44 сцепки и, в частности, на опорном корпусе 376 ролика. Датчик имеет измерительную звездочку 454, которая приводит в действие потенциометр для измерения межвагонного угла. Преобразователь 452, в одном варианте выполнения, может посылать электрические сигналы на непрерывной или частой периодической основе программируемому логическому контроллеру (ПЛК) фирмы Siemens, используемому для управления составом транспортных средств. Этот преобразователь, который может иметь стандартную конструкцию, может иметь выход сигнала в диапазоне между 4 и 20 миллиампер, в зависимости от измеряемого межвагонного угла.
Со ссылкой на Фиг.24 и 25, в дополнение к преобразователю также показан монтажный кронштейн 456, который содержит кольцевую концевую часть 458, на которую может быть установлен преобразователь. Кронштейн 456 прикреплен шарнирным пальцем 457 к нижнему краю боковой пластины 392, причем этот шарнирный палец проходит через отверстие 458. В этом отверстии также могут быть установлены два подшипника 460 трения фирмы Oilite, по одному в каждом конце. Два шарикоподшипника 462 с глубокими канавками, расположенные рядом с друг другом, с возможностью вращения устанавливают вал для звездочки 454. Подшипники могут удерживаться в отверстии посредством стопорного кольца 464. На стороне преобразователя подшипников может быть предусмотрено дополнительное наружное стопорное кольцо 466. К кронштейну на противоположной звездочке стороне приварен держатель 468 преобразователя, который проходит по дуге больше, чем 270 градусов. К этому держателю четырьмя винтами 470 прикреплена монтажная пластина 472 преобразователя. Центральный вал преобразователя проходит через эту пластину и вставлен внутрь центрального прохода, выполненного в вале 474 звездочки, и прикреплен к нему (например, установочным винтом) для вращения вместе с ним. Преобразователь с возможностью отсоединения установлен на пластине 472 с помощью четырех винтов 476. Конец электрического управляющего кабеля функционально соединен с преобразователем в месте, обозначенном номером 478 позиции.
Из вышеприведенного описания можно видеть, что преобразователь и его держатель с возможностью поворота установлены на пластине 392 сцепного механизма. Удлиненная цилиндрическая пружина 480 (см. Фиг.15) предусмотрена для смещения датчика и, в особенности, его звездочки 454 для приведения во взаимодействие с роликовой цепью 374. Причина для установки этой пружины состоит в том, чтобы обеспечить некоторую гибкость держателю датчика, уменьшая, таким образом, возможность повреждения, например, если кое-что, как грязь или камень, застрянет в звездочке или роликовой цепи. Нужно также отметить, что роликовая цепь поддерживается под натяжением посредством регулируемой тяги 482 натяжения в одном или обоих концах цепи.
На Фиг.27 и 28 проиллюстрирована фактическая связь между ближним к забою концом одного подвижного конвейерного механизма, выполненного в соответствии с изобретением, и дальним от забоя концом другого подвижного механизма 500, причем изображена только концевая секция последнего. Два шарнирных пальца 54 тележки использованы для прикрепления сцепного устройства 48 качения к двум концам конструкции 16. Каждый шарнирный палец может удерживаться на месте шайбой 502 и винтом 504, который проходит через пластину 502 и в отверстие под винт, расположенное в конце шарнирного пальца.
Обратимся теперь к монтажному механизму для ведомого шкива 32, который наиболее ясно показан на Фиг.26 и содержит два параллельных звена или поворотных кронштейна 330 и 332, которые с возможностью поворота установлены на втулках 334 шарнирного пальца, жестко установленных на внутренней части конструкции 16. Внутренние концы звеньев расположены вдоль продольной средней линии тележки и с возможностью поворота соединены с центральной опорной конструкцией 336, которая поддерживает по существу вертикально проходящий шарнирный палец 338. С этим пальцем с возможностью поворота соединен рычаг 240 управления лентой, который, в свою очередь, с возможностью поворота соединен с приводной тягой гидравлического цилиндра 242 натяжения ленты. Закрытый конец этого цилиндра с возможностью поворота соединен с регулируемой горизонтальной опорной пластиной 244.
Сам ведомый шкив имеет две выполненные с возможностью вращения секции 246 и 248, которые вращаются вокруг не вращающегося центрального опорного вала (не показан), расположенного вдоль средней линии шкива, обозначенной номером 250 позиции. Вал проходит от противоположных сторон центрального круглого опорного блока 252, жестко соединенного с одним концом рычага 240 управления. На противоположных сторонах опорного блока установлены два центральных подшипника, расположенные в месте, обозначенном номером 254 позиции, причем каждый с возможностью вращения обеспечивает поддержку соответствующей секции 246, 248 шкива. Известным образом наружная часть этих секций шкива содержит ряд параллельных, отстоящих друг от друга металлических планок, внутренние концы которых расположены на наружном кольцевом опорном элементе, который содержит центральный подшипник. Наружный подшипник, расположенный в месте, обозначенном номером 256 позиции, установлен на наружном конце каждой секции вала 50 для поддержания наружного конца соответствующей секции шкива. Горизонтально проходящие элементы 260, 262 конструкции прочно соединены с центральной конструкцией 336, а также и с пластиной 244. Эти элементы конструкции используются для приложения силы к ведомому шкиву, чтобы обеспечить его натяжение.
Положение ведомого шкива может быть отрегулировано с целью натяжения ленты, используя гидравлический цилиндр 242. Чтобы обеспечить автоматическую систему для корректировки положения ленточного конвейера, в каждом конце ведомого шкива может быть предусмотрена система фотодатчиков. Как проиллюстрировано, на искривленной направляющей 46 установлены два полупроводниковых излучателя 266. Для каждого из этих излучателей имеется фотодетектор 268, который изображен на Фиг.26. Пока ленточный конвейер должным образом центрирован на ведомом шкиве, импульсы световых пучков могут проходить от каждого излучателя 266 (через промежутки в секции смежного шкива) к соответствующему ему фотодетектору, который установлен на внутренней части одного из продольных элементов конструкции, формирующих конструкцию 16. Однако, если конвейерная лента перемещается на ведомом шкиве в поперечном направлении, чтобы полностью заблокировать один из световых пучков, программируемому логическому контроллеру подается сигнал, который приводит к втягиванию или удлинению приводной тяги гидравлического цилиндра 242. Приводная тяга будет перемещаться в таком направлении, чтобы привести к повороту в горизонтальной плоскости центрального вала ведомого шкива для того, чтобы натянуть конвейерную ленту на той стороне, в которую она переместилась. В результате лента будет стремиться переместиться назад в свое центральное положение.
Как проиллюстрировано, каждый фотодатчик совмещен с концевыми секциями ведомого шкива так, чтобы световой пучок периодически прерывался параллельными планками, расположенными на внешней части ведомого шкива. Из-за такого расположения каждый фотодетектор посылает сигнал импульса в программируемый логический контроллер, когда лента не полностью блокирует луч света. Таким образом, если лента должным образом отцентрирована, импульсные сигналы посылаются в контроллер обоими фотодетекторами 268. Когда импульсный сигнал не испускается одним из детекторов света, то это указывает, что лента переместилась слишком сильно в направлении этого конкретного детектора, а система управления предпримет шаги, чтобы повторно центрировать ленту.
От маленькой лебедки 270 отходит нейлоновая полоска 272 шириной два дюйма (51 мм). Лебедка и полоска размещены выше одного фотодетектора 268 и установлены на внутренней части основной конструкции 16 транспортного средства. Полоска заканчивается металлическим крюком, который проходит через отверстие, выполненное в конце вертикальной соединительной пластины 276. Пластина 276 жестко соединена с одним краем горизонтальной пластины 244. Следует понимать, что, как только ленточный конвейер установлен на месте и проходит вокруг ведомого шкива (а также и ведущего шкива), он может быть должным образом натянут путем натяжения полоски 272, что, в свою очередь, приведет к перемещению элементов 260, 262 конструкции и прикрепленной центральной конструкции 336 в направлении к концу ведомого шкива транспортного средства.
Фиг.32 изображает иллюстративную сеть программируемых логических контроллеров для состава подвижных конвейерных транспортных средств, как описано выше. Эта система управления работает с помощью ведущего ПЛК, обозначенного номером 600 позиции, который может быть расположен на разгрузочной тележке, которая, как показано, предпочтительно оборудована двумя ПЛК, по одному для каждой из его двух пар колес, так как ПЛК также могут использоваться для рулевого управления. В этой конкретной системе имеется пятнадцать интеллектуальных ведомых ПЛК, которые могут быть пронумерованы от одного до пятнадцати и которым, как показано на чертежах, присвоены адреса Профибуса от 21 до 35. В предпочтительном варианте выполнения ПЛК управляются беспроводными радиокомандами с использованием двух приемных радиостанций, причем одна приемная радиостанция расположена на разгрузочной тележке, а вторая приемная радиостанция расположена на загрузочной тележке. Радиостанция загрузочной тележки обозначена номером 602 позиции, тогда как приемная радиостанция разгрузочной тележки обозначена номером 604 позиции. Таким образом, составом конвейерных транспортных средств можно управлять с любого конца состава посредством радиопередающего узла 603, который предпочтительно является портативным узлом, переносимым оператором. Все команды приходят из ведущего ПЛК и идут в другие ПЛК с помощью системы Профибуса. Тот же самый машинный код может использоваться в каждом ведомом ПЛК так, чтобы тележки конвейера были взаимозаменяемыми для любой конкретной работы. Следует понимать, что радиостанция загрузочной тележки будет использоваться оператором загрузочной тележки, чтобы управлять конвейерной системой, когда добыча полезных ископаемых находится в стадии реализации. Радиостанция разгрузочной тележки может использоваться оператором разгрузочной тележки, который может также управлять поперечным конвейером на разгрузочной тележке. Система радиоуправления является блокируемой, чтобы предотвратить поступление конфликтующих сигналов, посредством выключателя, расположенного на радиостанции загрузочной тележки, служащим для определения, какая радиостанция является действующей. Как проиллюстрировано на Фиг.32, приемной радиостанции разгрузочной тележки может быть назначен адрес Профибуса 40, тогда как приемной радиостанции загрузочной тележки может быть назначен адрес Профибуса 41. На передающем узле 603 может быть предусмотрен управляемый вручную джойстик 601. Такое управление джойстиком используется, чтобы осуществлять рулевое управление ведущей парой колес на составе через ПЛК, расположенном на ведущем транспортном средстве. Управление джойстиком имеет стандартную конструкцию, и соответственно подробное описание здесь опущено.
На Фиг.33 изображены части электрической цепи, предусмотренные на каждом конвейерном транспортном средстве для осуществления рулевого управления транспортным средством и корректировки транспортного средства в требуемом направлении. Эта электрическая цепь соединена с программируемым логическим контроллером (ПЛК) соответствующего транспортного средства. Для безопасности в среде шахты цепь содержит барьер 555 искробезопасности. Барьеры искробезопасности предотвращают образование достаточно сильных искр или температурных эффектов, которые могли бы вызвать зажигание горючего материала в воздухе. Этот барьер соединен с входом ПЛК транспортного средства в месте, обозначенном номером 556 позиции. ПЛК, который может быть ведомым ПЛК, обозначенным номером 610 позиции, вместе с барьером 555 размещены в огнеупорном кожухе, обозначенном частично штрихпунктирной линией 558. Барьер содержит аппаратную стойку, в которую включено большое количество искробезопасных элементов 562 барьера, причем эти элементы барьера, предотвращающие короткое замыкание, широко известны в области горнодобывающего оборудования. Также на Фиг.33 изображен первый соленоидный клапан 564 для осуществления рулевого управления колесом транспортного средства направо, и второй соленоидный клапан 566 для осуществления рулевого управления колеса налево. Эти клапаны могут иметь идентичную конструкцию. Эти клапаны управляют потоком гидравлической жидкости в гидравлические цилиндры 74 возвратно-поступательных приводных механизмов или из них, которые поворачивают колеса транспортного средства вокруг их соответствующих вертикальных осей. Посредством элементов барьера искробезопасности также соединены два дополнительных соленоидных клапана 568, 570. Снова, эти два клапана могут иметь идентичную конструкцию, причем подходящие клапаны можно приобрести в фирме Bosch Rexroth в Германии. Эти клапаны могут также быть того же самого типа, что и клапаны 564, 566, используемые для рулевого управления. Клапан 568 используется для направления гидравлической жидкости к двум гидравлическим двигателям для этих двух колес 64, 66, чтобы поворачивать или направлять транспортное средство в дальнее от забоя направление. Аналогично, соленоидный клапан 570 используется для направления гидравлической жидкости к тем же самым двум двигателям, чтобы поворачивать или направлять транспортное средство в ближнее к забою направление. Кроме того, с одним из элементов 562 барьера соединен преобразователь вращения, который используется для измерения межвагонного угла для транспортного средства. В одном иллюстративном варианте выполнения этот преобразователь представляет собой преобразователь, продаваемый компанией Celesco. Вышеупомянутый датчик 75 угла поворота электрически соединен с его собственным барьером 572 искробезопасности. В одном иллюстративном варианте выполнения каждый элемент 562 барьера является контактом Финикса, а барьер 572 представляет собой барьер, продаваемый фирмой Pepperl и Fuchs.
Обратимся теперь к блок-схеме программного обеспечения, изображенной на Фиг.34А и 34В. Следует понимать, что эта программа выполняется большим количеством ПЛК, по одному для каждой пары колес в составе конвейерных транспортных средств. Как объяснено ниже, они включают ведущий ПЛК 600 и много интеллектуальных ведомых ПЛК, причем все ПЛК связаны и координируют свою работу рулевого управления, когда состав движется либо в обратном, либо в прямом направлении. Все команды поступают из ведущего ПЛК 600. Следует понимать, что термины "контроллер", "система контроллера" и "управляющее средство", как здесь используются, могут включать большое количество ПЛК, работающих как одна полная система рулевого управления. Следует также понимать, что ведущая пара колес в составе, определяемая направлением движения состава, управляется вручную, т.е. человеком-оператором, находящимся в ведущем конце состава, использующим отдельное рулевое управление для этой конкретной цели, например управление 601 джойстика. Цель автоматической системы рулевого управления, описанной далее, состоит в том, чтобы каждая ведомая пара колес следовала по тому же самому пути движения, что и ведущая пара колес.
Как только состав конвейерных транспортных средств начал движение с фиксированной заданной скоростью движения, например, нажимая соответствующую кнопку "корректировка ВКЛ", при условии, что система рулевого управления установлена в автоматический режим, ведущий ПЛК сначала определяет направление движения состава на этапе 576, т.е. перемещается ли состав в дальнее от забоя или в ближнее от забоя направление. Последовательность последующих этапов программного обеспечения будет зависеть в некоторой степени от этого направления движения, причем этапы, изображенные на Фиг.34А и 34В, показаны при условии направления движения в ближний от забоя конец. Компьютерная программа для управления весьма подобна для направления движения в дальний от забоя конец, причем любое существенное отличие будет отмечено в последующем описании программы для управления при направлении движения в ближний от забоя конец. Проиллюстрированный ряд программ применяется в целом для каждой пары ведущих колес в составе транспортных средств с типовой парой колес, обозначенных буквой Y на Фиг.34А. Для каждого набора ведущих колес система Профибуса на не прекращающейся и непрерывной основе (или частой периодической основе) задает установочный угол для колес Y. Этот установочный (SP) угол берется из памяти ведущего ПЛК и является требуемым углом поворота для колес Y, причем этот угол представляет собой тот угол, который имела ведущая пара колес, когда ведущие колеса находились в том же самом месте, в котором в данный момент находятся колеса Y. После получения установочного угла на этапе 578 ведущий ПЛК вычисляет широкий диапазон нечувствительности, вычисляя максимальный угол (SP+) этого диапазона и минимальный угол (SP-) диапазона. В одном иллюстративном варианте выполнения широкий диапазон нечувствительности R равен 6 градусам, но этот диапазон может в некоторой степени варьироваться в зависимости от конкретной системы рулевого управления и ее характеристик. Соответственно, SP+=SP+3 градуса, тогда как SP-=SP-3 градуса. Эти два вычисления указаны на этапах 580, 582.
Следующий этап программы, обозначенный номером 581 позиции, должен вычислять измененный межвагонный угол (MIA), умножая измеренный межвагонный угол на колесах Y на -1. Этот этап программы требуется только для движения в направлении ближнего к забою концу и не требуется для движения в направлении дальнего от забоя конца, которое является более устойчивым направлением движения этой системы рулевого управления. Следующие два этапа, представленные номерами 582 и 584 позиций, представляют собой два вычисления, необходимые для определения требуемого диапазона угла поворота для колес Y. На этом этапе вычисляют отрицательное установочное значение (SPN), прибавляя измененный межвагонный угол (MIA) к SP-. Программа также вычисляет положительное установочное значение (SPP), прибавляя измененный межвагонный угол (или же, если перемещение осуществляется в направлении дальнего от забоя конца, просто межвагонный угол) к SP+. На этапе 586 программа определяет, больше ли установочное значение (SP) для колес Y, чем заданный небольшой угол, который в одной иллюстративной версии этой системы равен 2 градусам. Как указано на этапе 588, если установочное значение для колес Y будет больше, чем 2 градуса, то программа умножает измеренное угловое положение колеса, которое является фактическим существующим положением колес Y, на заданный множитель X, чтобы получить откорректированное положение поворота (ASP). Причина такой корректировки состоит в том, чтобы откорректировать отклонение в положении колес Y, поскольку состав транспортных средств перемещается в направлении ближнего к забою конца. Величина этого отклонения варьируется, поскольку зависит от таких факторов, как длина конвейерного состава и других факторов. Значение множителя Х для каждой конвейерной системы может быть вычислено посредством пробных испытаний конкретной конвейерной системы, когда она изготовлена. В одном иллюстративном варианте выполнения для такой системы множитель Х равен 0,5. Отметим также, что множитель Х может меняться или быть разным для каждой пары колес в составе конвейерных транспортных средств. Если определено, что SP для колес Y не больше, чем 2 градуса (например), программа на этапе 590 запрашивает, больше ли установочное значение для колес, чем -2. Если ответ отрицательный, то программа переходит к этапу 588, умножая измеренное угловое положение колеса на множитель X. Однако, если ответ положительный, то используют этап 592, на котором измеренное угловое положение колеса умножается на единицу, чтобы получить откорректированное положение поворота (ASP). Другими словами, никакой корректировки установочного значения не будет, если требуемый угол поворота будет меньше, чем небольшой заданный угол (либо положительный» либо отрицательный), поскольку при этих условиях отклонение колес не представляет существенную проблему. Относительно этих этапов корректировки отклонения нужно отметить, что, если состав перемещается в направлении дальнего от забоя конца, множитель Х для направления движения в дальний от забоя конец отличается от множителя Х для направления движения в ближний к забою конец. Снова, это значение определяют во время испытаний на рулевое управление конкретного состава транспортных средств. В одной версии состава транспортного средства множитель Х для движения в направлении дальнего от забоя конца равен 1, 2.
На следующем этапе 594 определяют узкий диапазон нечувствительности, вычисляя сперва максимальный угол поворота (SA+), прибавляя половину узкого диапазона нечувствительности к установочному значению (SP). В одной системе рулевого управления узкий диапазон нечувствительности был установлен равным 1 градусу, так что одна половина узкого диапазона нечувствительности равна 1/2. Аналогичным образом на этапе 596 программа вычисляет минимальный угол поворота (SA-) для этого узкого диапазона нечувствительности, вычитая 1/2 градуса из установочного значения (SP).
Обратимся теперь к дополнительным этапам программы, проиллюстрированным на Фиг.34В. На этапе 598 программа определяет, больше ли откорректированное положение поворота (ASP), чем максимальный угол поворота (SA+). Если ответ положительный, то программа включает сигнал ошибки плюс запрещение (ЕР1) в ПЛК (этап 610). Если ответ отрицательный, то программа на этапе 612 определяет, является ли ASP меньше, чем SA-. Если ответ положительный, программа включает сигнал ошибки минус запрещение (EMI) на этапе 614. Хотя это и не обозначено в блок-схеме, следует понимать, что, если ASP меньше, чем SA+ и больше, чем SA-, то ни сигнал EPI, ни сигнал EMI не включаются для оставшихся вычислений.
Расстояние, пройденное составом, определяется числом импульсов, созданных контроллером, причем это число непосредственно зависит от количества времени, в течение которого состав был смещен назад от выбранного местоположения, например местоположения, в котором состав последний раз останавливался. С проиллюстрированным составом конвейерных транспортных средств программа рулевого управления настроена так, чтобы первая пара ведомых колес была откорректирована до требуемого угла поворота, который основан на угле поворота ведущей пары колес с фактором задержки по времени одной половины тележки или длины транспортного средства. Другими словами, требуемый угол поворота для первой пары ведомых колес вычисляют, основываясь на фактическом угле поворота ведущего набора колес, которые существовал до того, как состав переместился на половину длины тележки в настоящее местоположение. В случае оставшихся ведомых колес имеется задержка на полную длину тележки для применения угла поворота ведущей пары колес между соответствующей ведомой парой колес и парой колес, находящейся непосредственно перед этой парой. На этапе 618 программы определяют, что откорректированное положение поворота для колес больше, чем максимальный угол (SP+) диапазона нечувствительности. Если ответ положительный, то соленоидный клапан 566 активируют для поворота колеса Y налево, как показано на этапе 620. Выход за пределы нужного значения избегают или балансируют при помощи сигнал ошибки плюс запрещение (EPI), который вместе с таймером ошибки считывает фактический угол колес каждые 250 миллисекунд. Если измеренный фактический угол колеса находится в узком диапазоне нечувствительности, то соленоидный клапан 566 выключен, предотвращая дополнительный поворот налево.
Дополнительные этапы 624, 626 и 628 являются этапами программы для поворота колес Y направо, когда перемещение осуществляется в ближний от забоя конец. Программа определяет, является ли откорректированное положение поворота (ASP) меньше, чем минимальный угол (SP-) диапазона нечувствительности. Если это так, то требуется повернуть колеса направо, а на этапе 626 активируют соленоидный клапан 564 для колес, чтобы заставить гидравлические цилиндры для колес Y поворачивать колеса направо. Снова проскакивание предотвращают путем использования вышеупомянутого сигнала ошибки минус запрещение (ЕМ1) на непрерывной или частой основе во время поворота, используя таймер ошибки. Фактический угол колес может быть измерен каждые 250 миллисекунд и, как только фактический измеренный угол находится в пределах узкого диапазона нечувствительности, соленоид деактивируют.
Обратимся теперь к гидросистеме, используемой для откатки конвейерного состава и подачи гидравлической мощности для поворота колес. На Фиг.36А и 35В изображены левые и правые части схематической иллюстрации гидравлических систем одного из конвейерных транспортных средств. Следует понимать, что впускное или загрузочное конвейерное транспортное средство и промежуточные конвейерные транспортные средства имеют идентичные гидросистемы, иллюстративный вариант которых изображен на Фиг.35А и 35В. Кроме того, разгрузочная тележка содержит гидравлические системы, аналогичные системам, показанным на этих чертежах, но они включает также дополнительный подъемник конвейера и поворотную гидравлическую систему, которая не изображена, поскольку не является частью настоящего изобретения, а является стандартной конструкцией.
Обратимся сначала к элементам гидросистемы, изображенной на Фиг.35А. В нижнем правом углу чертежа показан резервуар 222 для гидравлической жидкости, который может иметь вместимость 60 литров гидравлического масла. В резервуаре есть две отходящие гидравлические линии 630, 632. Линия 630 ведет к вспомогательному гидравлическому насосу 212, который используется для обеспечения гидравлической жидкостью вспомогательных средств транспортного средства, включая рулевые цилиндры. Подходящим для этой цели насосом является насос фирмы Bosch Rexroth (именуемой здесь "Rexroth), модель A10VS010DFR-52R-PUC64N00.
Как объяснено выше, этот гидравлический насос приводится в действие электродвигателем 208, как и другой гидравлический насос 210. Двигатель может быть взрывобезопасным двигателем на 10 л.с., работающим при 1470 об/мин, вращающимся по часовой стрелке. Насос 210, который в одном варианте выполнения используется для обеспечения гидравлических двигателей для двух колес транспортного средства гидравлической жидкостью, является насосом, продаваемым фирмой Rexroth как модель AA10VG18DGM1/1DR-NSC66F0145. С этим насосным узлом 210 соединен и управляет его работой магистральный узел 634, который имеет 3 части, включая нижнюю пластину 636, промежуточную пластину 638, имеющую вставной селективный клапан 640 и соленоидный клапан 642. Соленоидный клапан представляет собой электрически управляемый клапан типа открыто-закрыто, которым управляют посредством ПЛК транспортного средства. В одном варианте транспортного средства магистральный узел изготовлен фирмой Rexroth, модель G341/12-A1-PM-114. С вставным селективным клапаном 640 гидравлически соединен тормоз 644 задержки управления потоком, который может быть изготовлен компанией Hydac, модель DRV-8-1.1/12. С этим тормозом задержки соединен контрольный клапан 646 тормоза, который может быть шаровым клапаном, изготовленным фирмой DMIC, модель BV3D-025OSA-111.
Выпускное отверстие насосного узла 210 соединено гидравлической линией 648 с двумя гидравлическими двигателями 68, которые приводят в действие эти 2 колеса 64, 66. Как показано выше, каждый гидравлический двигатель функционально соединен с планетарной коробкой 176 передач, которая соединена с соответствующим колесом для приведения его в действие. В иллюстративном варианте выполнения этой приводной системы коробка 176 является двухступенчатой планетарной коробкой передач с передаточным числом 43:1. Для каждого колеса может быть предусмотрен стояночный тормоз 650. Привод колеса для каждого колеса, показанный штрихпунктирной линией 652, может быть приводом колес, продаваемым фирмой Rexroth, модель GFT7T2.4042. Вторая гидравлическая линия 654 также проходит от отверстия гидравлического насосного узла 210 к двум гидравлическим двигателям 68. Таким образом, гидравлическая жидкость может протекать в любом направлении через линии 648 и 654, которое зависит от направления движения требуемого транспортного средства. В одном варианте выполнения скорость потока через эти линии составляет 7 галлонов в минуту (26,6 л/мин). С линией 654 соединен горячий масляный челнок 656, который может быть узлом, продаваемым под названием Command, модель HOSV-10-N-C-6TS. Линия 648 также функционально соединена с челноком 656. Челнок используется для направления возвращающегося гидравлического масла к резервуару 222 через гидравлическую возвратную линию 658, изображенную на Фиг.35В. Линия 658 соединена с резервуаром через обратный фильтр 214. Этот фильтр может быть фильтром, продаваемым под названием Western Filter, модель E0211B2R10. Имеется другой фильтр 214, который может называться всасывающим фильтром, соединенным с гидравлической линией 632 между резервуаром и насосным узлом 210.
Вспомогательным насосным узлом 212 управляют посредством клапанного узла 660, который, в свою очередь, управляется с помощью ПЛК транспортного средства. Выпускное отверстие насосного узла 212 соединено с гидравлической линией 662, которая разветвляется на две линии, одна из которых проходит через фильтр 664, который может представлять собой 10-мкм фильтр, изготовляемый фирмой Hydac, модель DFBH/HC30G10B1.1/12. Этот фильтр соединен через гидравлическую линию 666 с магистральным узлом 668. В одном иллюстративном варианте выполнения этот магистральный узел изготовлен фирмой Rexroth, модель VB8.037.A2. С этим магистральным узлом соединены два схожих соленоидных клапана 670 и 672, которые управляются программируемым логическим контроллером транспортного средства. Эти соленоидные клапаны могут быть клапанами, продаваемыми фирмой Rexroth, модель 4WE6J5X/BG12-19NXHCKL. Соленоидный клапан 670 используется для управления гидравлическим линейным приводным механизмом 242 для натяжения конвейерной ленты, работа которого была описана выше. Соленоидный клапан 670 установлен на редукционном клапане 674, который может быть изготовлен фирмой Rexroth, модель ZDR6DP2-4X/75YM/12. Линия 666 соединена проходом в магистральном узле с входным отверстием 676 соленоидного клапана 672. Выпускное отверстие магистрального клапана соединено другим проходом 680 в магистрали с гидравлической возвратной линией 658. В зависимости от требуемого направления поворота двух колеса транспортного средства, соленоидный клапан 672 может направлять гидравлическую жидкость к любому концу двух гидравлических линейных приводных механизмов, которые используются для осуществления рулевого управления двумя колесами транспортного средства. Гидравлическое масло в цилиндре может при этом вытекать из цилиндра из конца, противоположного концу цилиндра, в который гидравлическая жидкость подается соленоидным клапаном 672.
Обратимся к элементам, которые составляют магистральный узел 668. который обладает способностью измерения нагрузки, благодаря наличию предохранительного клапана 682, который может быть клапаном, продаваемым под названием Command, модель RVDA-08-N-S-0-30/28. Этот клапан присоединен к линии 680 и к диагностической точке 684. Также в магистрали установлены два вставных селективных клапана 686, 687, которые могут иметь ту же самую конструкцию. Эти клапаны обеспечивают гидравлическую обратную связь для связанного с ними гидравлического цилиндра со вспомогательным насосом и являются частью системы измерения нагрузки. Они гарантируют, что насос обеспечивает достаточно гидравлического давления, чтобы позволить цилиндру работать как нужно. В одном варианте выполнения эти клапаны продаются компанией Sun, модель CDAB-XBN. В каждой из гидравлических линий, проходящих от соленоидных клапанов 670, 672 установлены узлы 690 управления потоком, которые могут иметь аналогичную конструкцию, например, узел, продаваемый фирмой Command, модель FCVL-08-N-S-0-FF. Узлы 690 используются, чтобы установить скорость, с которой гидравлические цилиндры перемещаются, чтобы получить правильный отклик в гидросистеме. Также на каждой гидравлической линии, проходящей от соленоидного клапана 670, 672, установлены клапаны 692, которые являются уравновешивающими клапанами, предустановленными для работы с давлением в 3000 PSI (207 атм). Клапан, который может использоваться с этой целью, является клапаном фирмы Command, модель CBPA-08-N-S-0-30CB. Каждый клапан 692 работает как сервоуправляемый предохранительный клапан, так что, когда максимально установленное давление (которое является регулируемым) достигнуто, клапан сбрасывает масло из соображений безопасности.
Как указано выше, разгрузочное тележное транспортное средство, изображенное на Фиг.30 и 31, имеет две пары колес, выполненных с возможностью рулевого управления. Поскольку необходимо управлять обоими наборами колес на этой тележке, гидросистемы, изображенные на Фиг.35А и 35В, продублированы на разгрузочном тележном транспортном средстве, которое также снабжено дополнительным магистральным узлом и двумя соленоидными клапанами для гидравлического цилиндра конвейерного подъемника, причем поворотный гидравлический цилиндр конвейера используется для управления поперечного конвейера на разгрузочном транспортном средстве.
Хотя настоящее изобретение было проиллюстрировано и описано так, как оно воплощено в иллюстративном варианте выполнения, то есть в варианте выполнения, имеющем особенную практичность для использования в качестве системы и способа рулевого управления для подвижных конвейерных транспортных средств, следует понимать, что настоящее изобретение не ограничено показанными здесь деталями, так как следует понимать, что специалистами могут быть выполнены различные исключения, модификации, замены и изменения в формах и деталях раскрытого конвейерного транспортного средства и в способе его работы, не отступая при этом от сущности и области настоящего изобретения. Например, специалисты в области конвейерной техники смогут легко применить настоящее изобретение к различным другим применениям рулевого управления, включающим состав транспортных средств, не отступая от сущности и области настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕНТОЧНОЕ КОНВЕЙЕРНОЕ УСТРОЙСТВО С РЕГУЛИРУЕМЫМ ВЕДОМЫМ ШКИВОМ | 2008 |
|
RU2415066C1 |
| КОНВЕЙЕРНЫЙ МЕХАНИЗМ С ШАРНИРНЫМ СОЕДИНИТЕЛЕМ | 2008 |
|
RU2424937C2 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ С ПРИВОДОМ НА ПЕРЕДНИЕ И ЗАДНИЕ КОЛЕСА | 1992 |
|
RU2032569C1 |
| МЕХАНИЗМ ПЕРЕДАЧИ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ С ЗАПАЗДЫВАНИЕМ И МЕХАНИЗМ РУЛЕВОГО УПРАВЛЕНИЯ КОЛЕСАМИ ЗАДНЕГО МОСТА С ЕГО ИСПОЛЬЗОВАНИЕМ | 2017 |
|
RU2657163C1 |
| САМОХОДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2015 |
|
RU2651528C1 |
| Устройство управления поворотом колёс транспортного средства | 2023 |
|
RU2809854C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВОЗДУШНЫМ ПОТОКОМ ЧЕРЕЗ СИСТЕМУ УСИЛИТЕЛЯ РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2017 |
|
RU2719055C2 |
| Автопоезд | 1977 |
|
SU763174A1 |
| БЕССТУПЕНЧАТАЯ ТРАНСМИССИЯ | 2011 |
|
RU2565463C2 |
| УСТРОЙСТВО И СПОСОБ ВОСПРИЯТИЯ ПОЛОЖЕНИЯ, КОРРЕКЦИИ И ИЗМЕНЕНИЯ РЕЖИМА В СИСТЕМЕ РУЛЕВОГО УПРАВЛЕНИЯ НЕСКОЛЬКИМИ МОСТАМИ | 2018 |
|
RU2756857C2 |
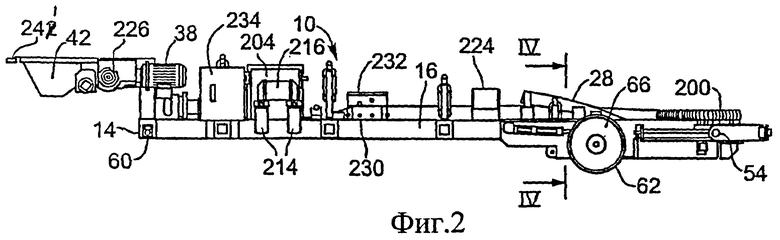
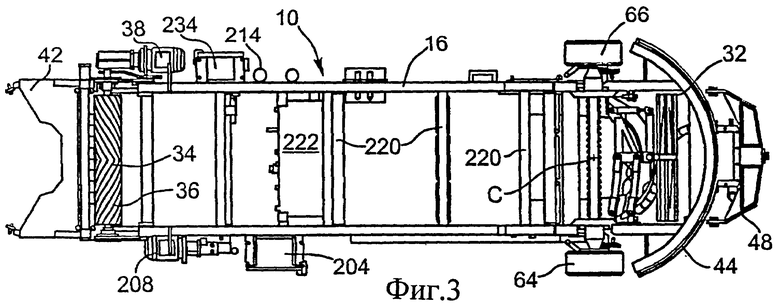
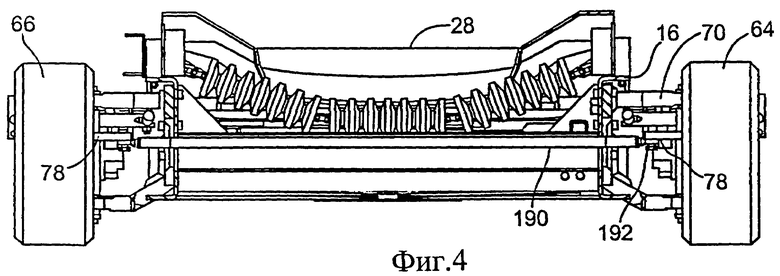
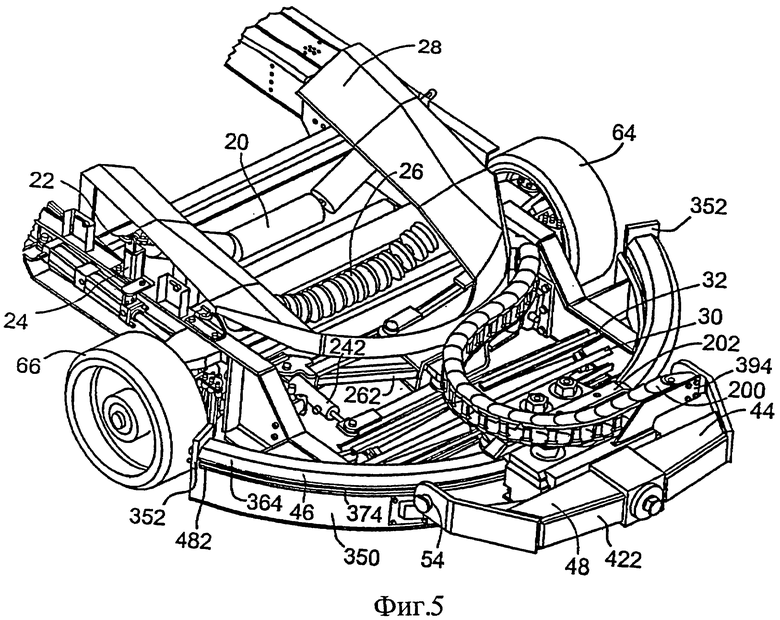
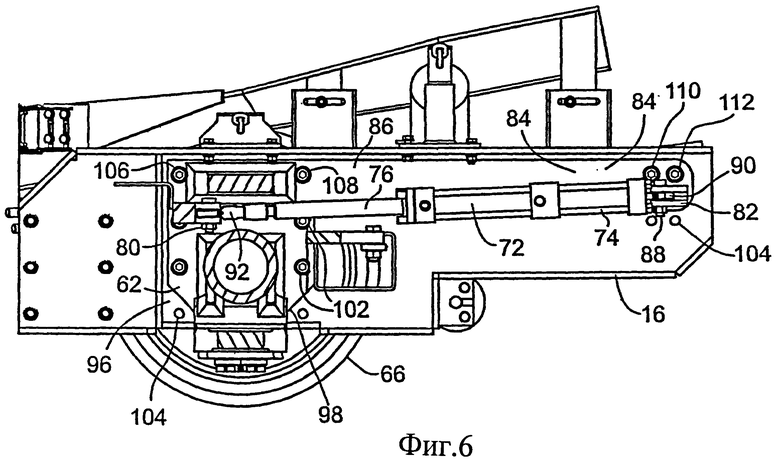
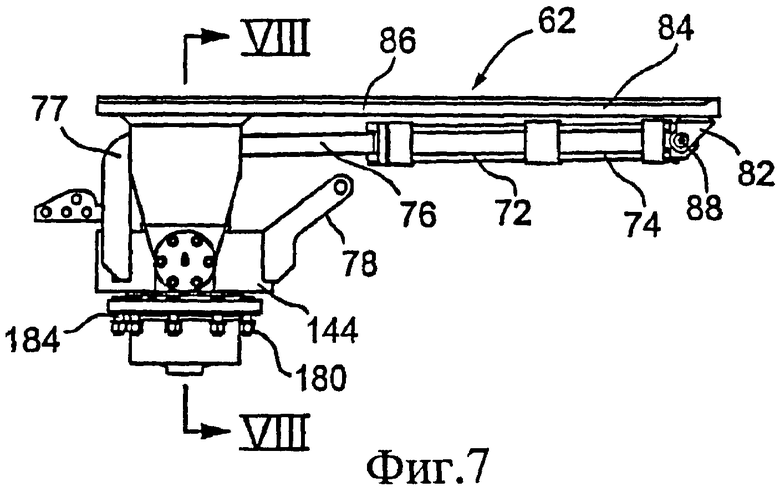
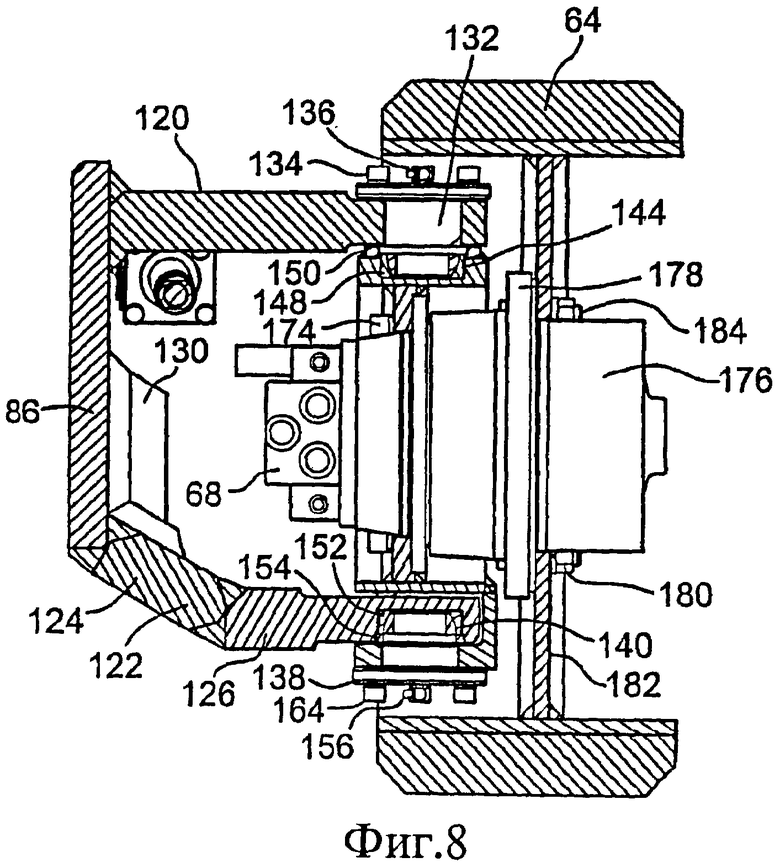
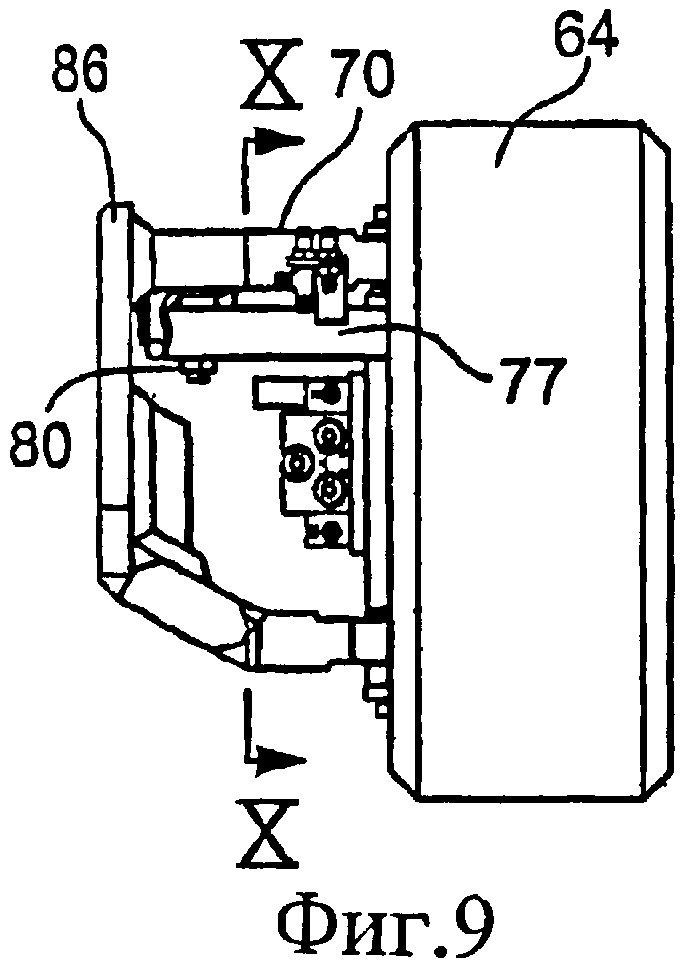
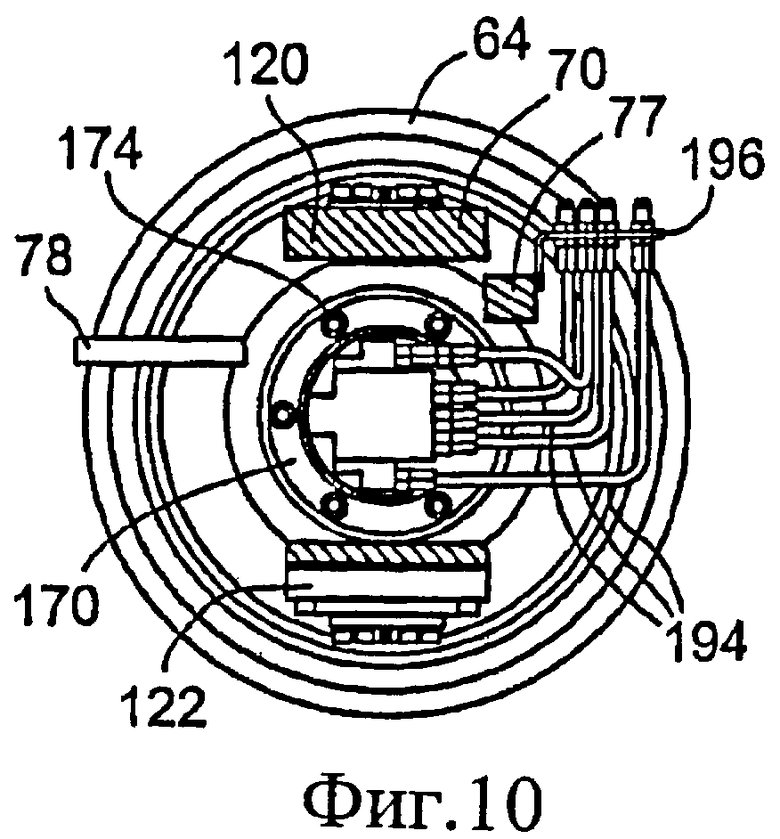
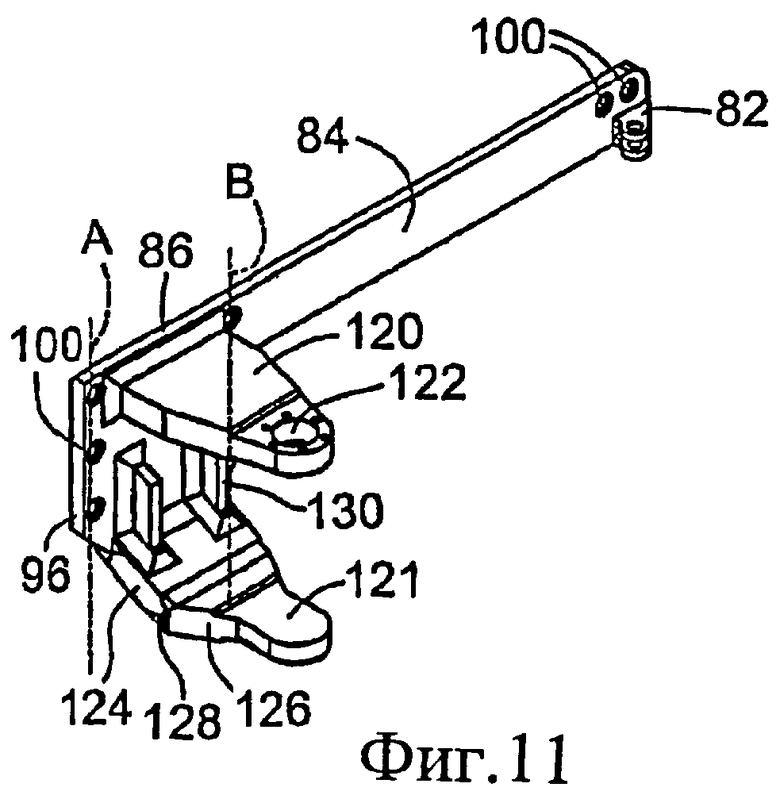
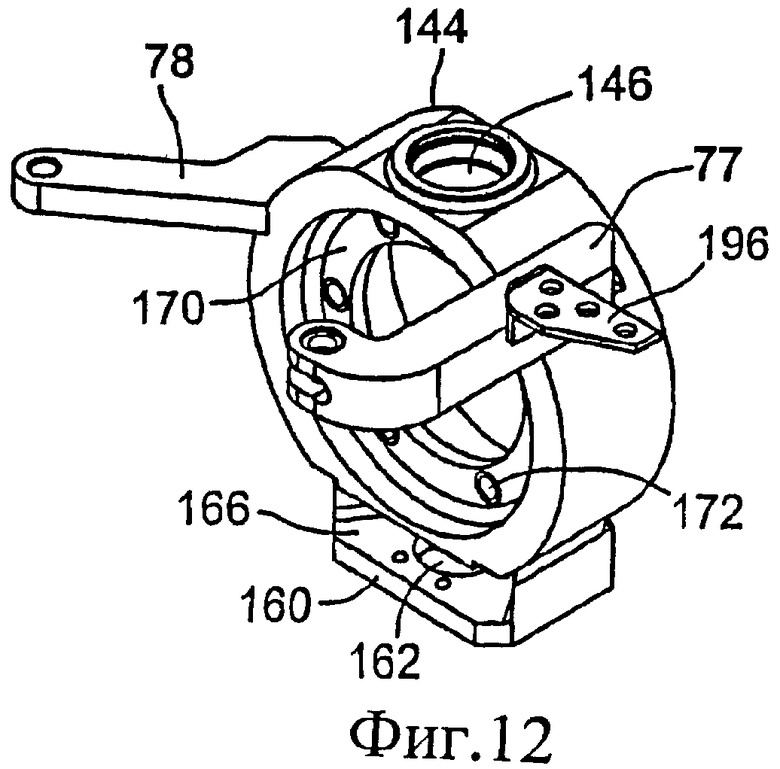
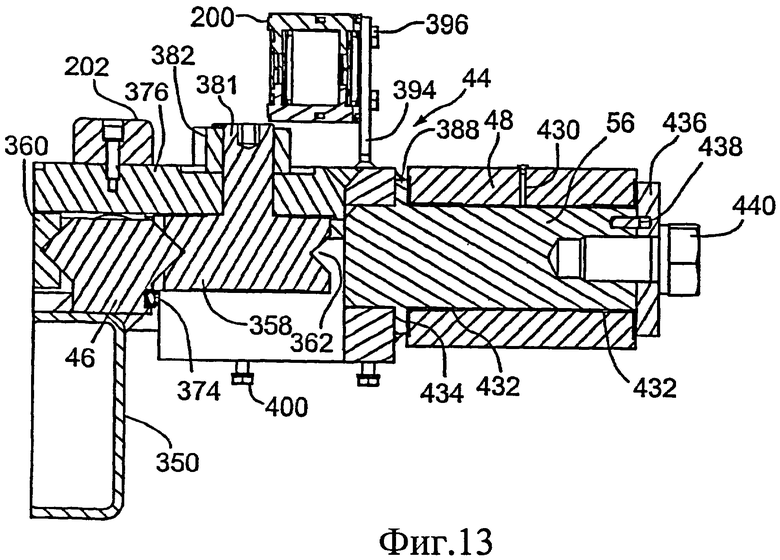
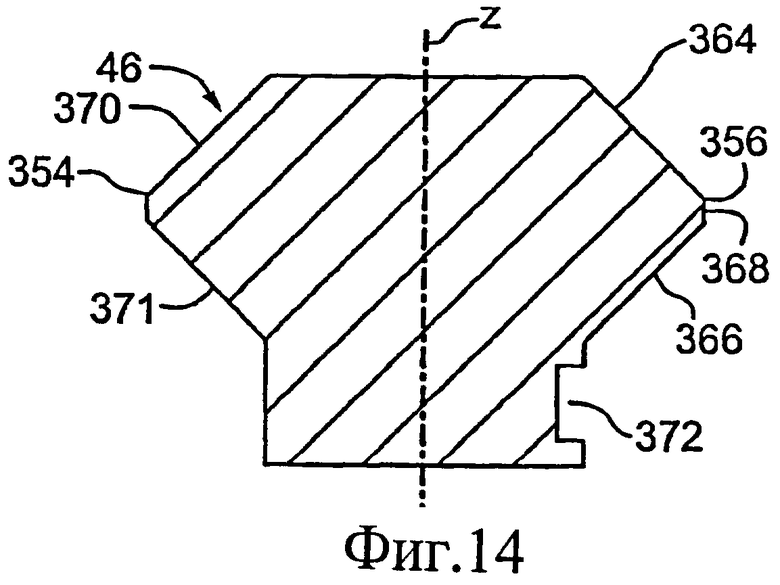
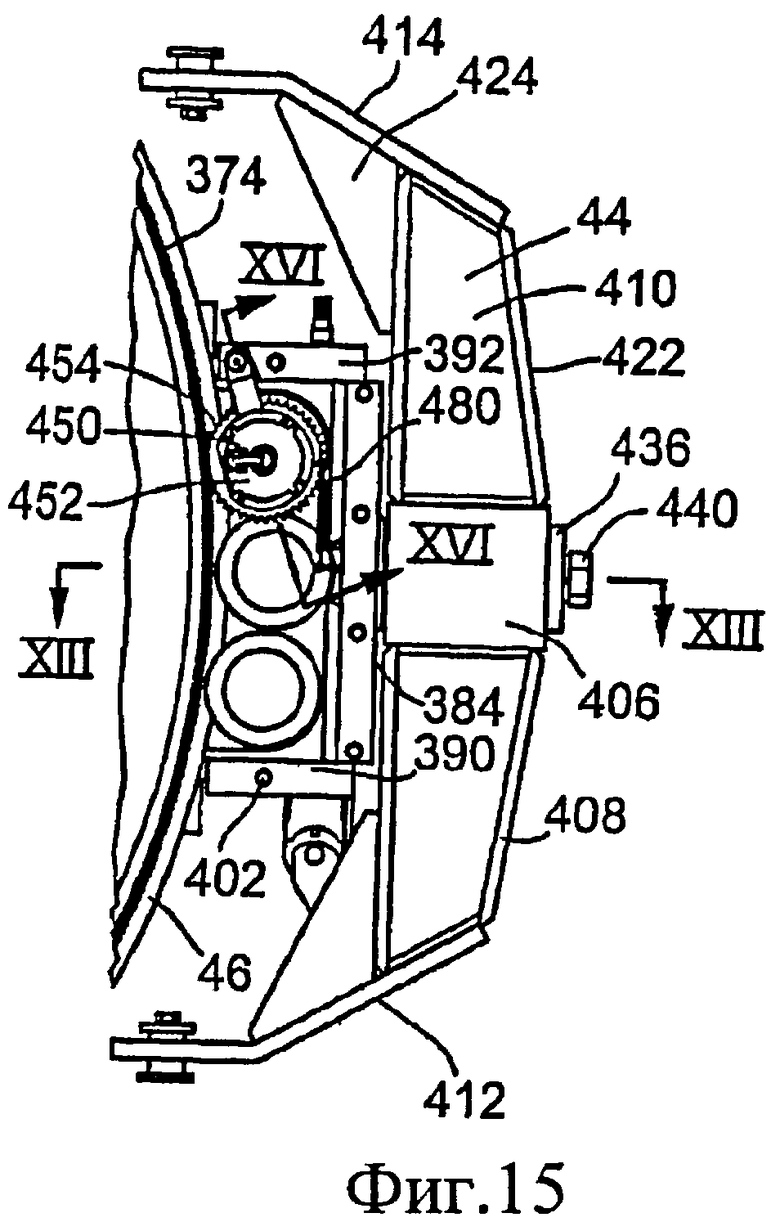
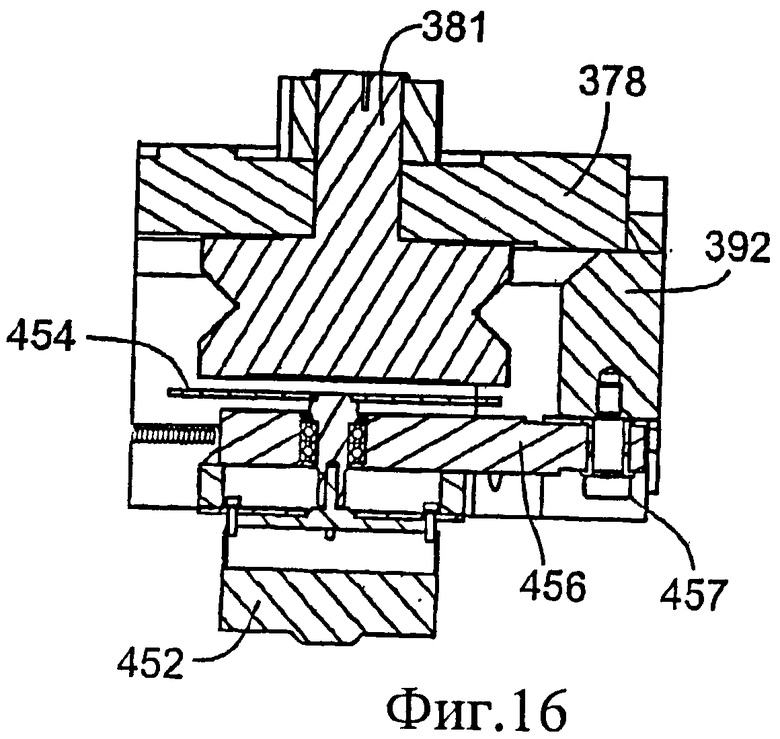
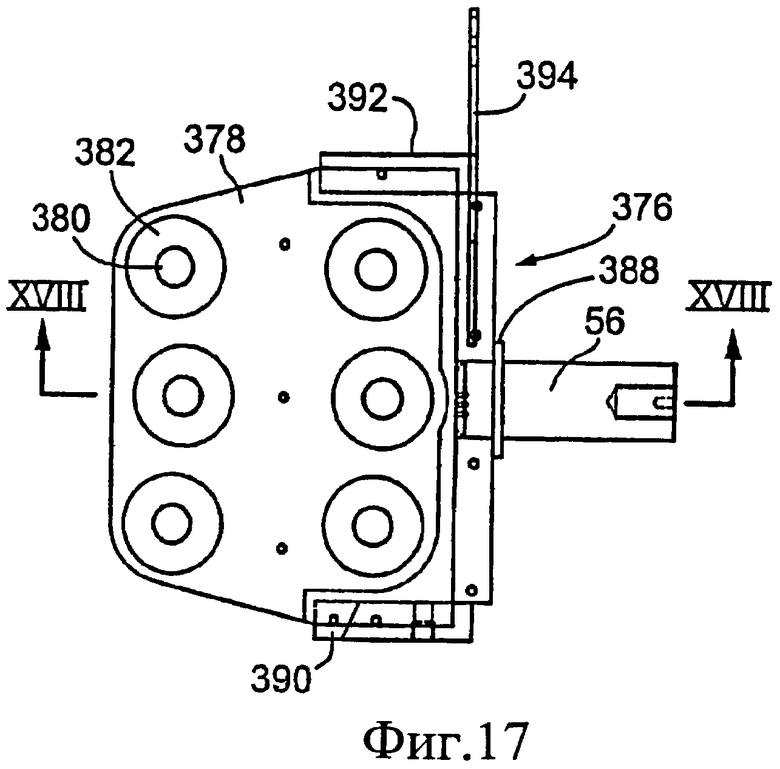
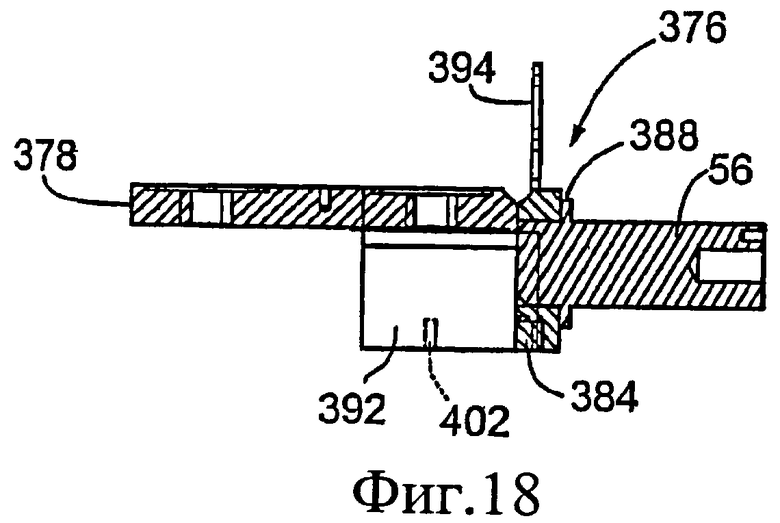
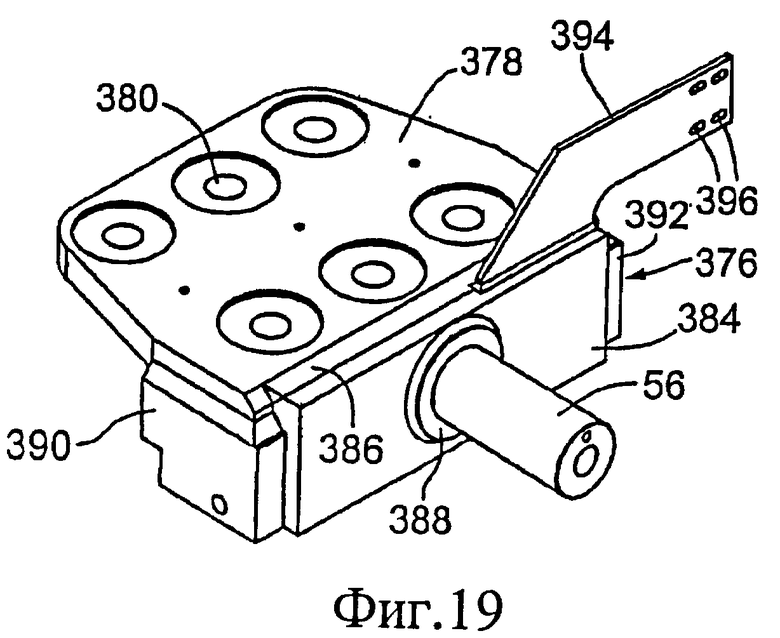
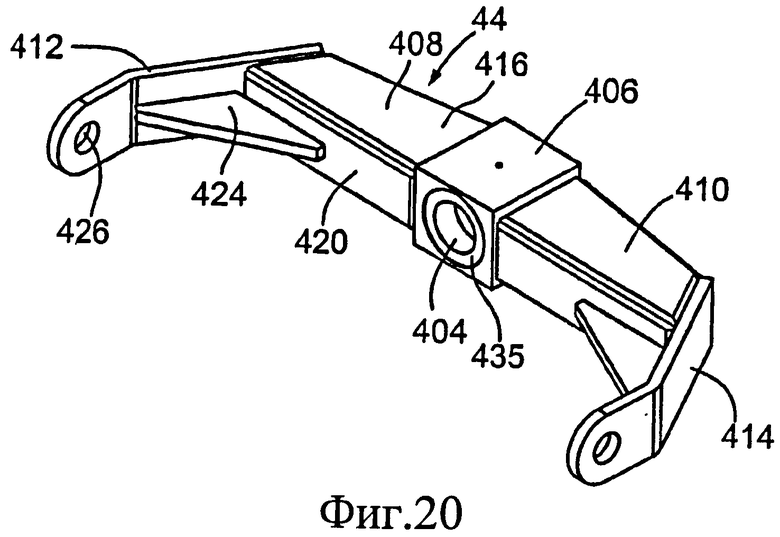
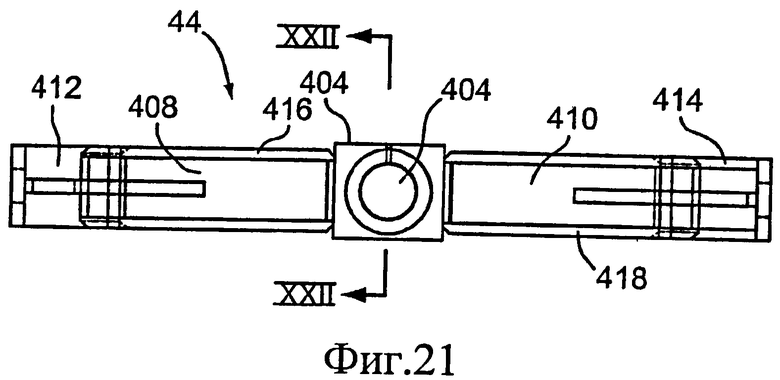
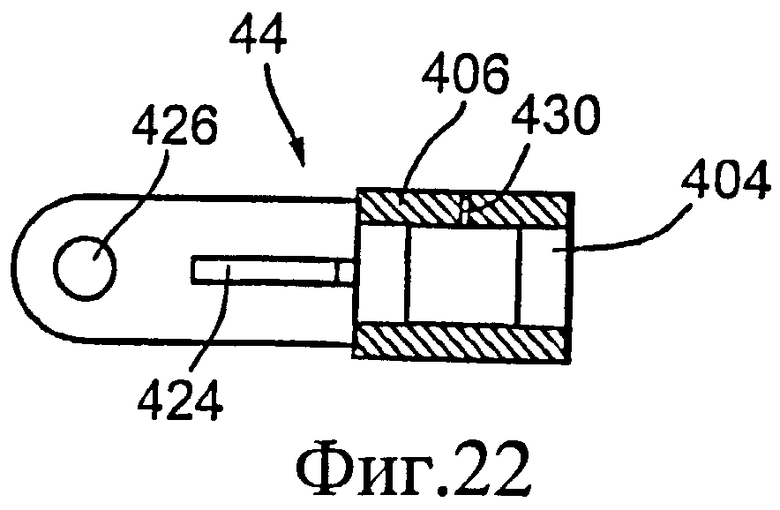
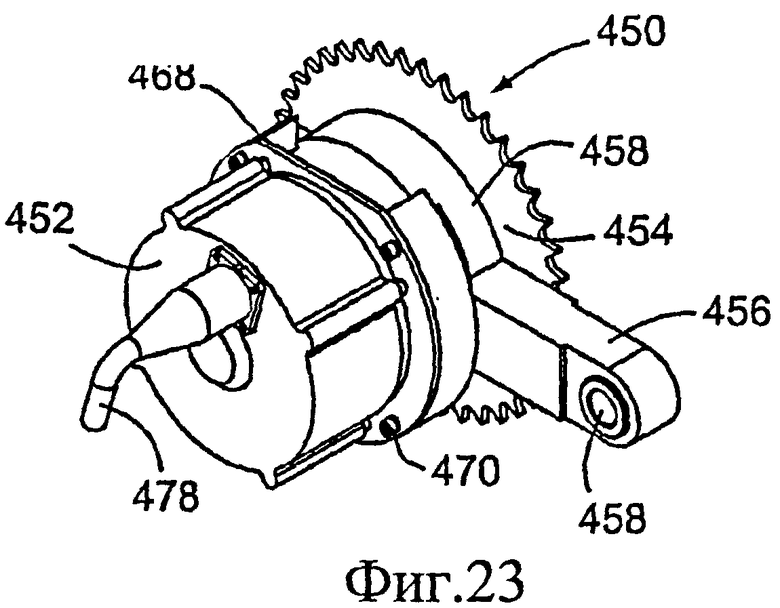
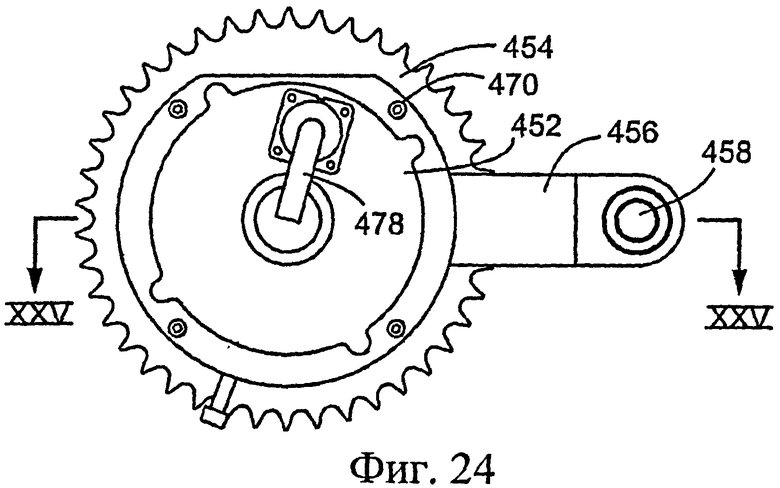
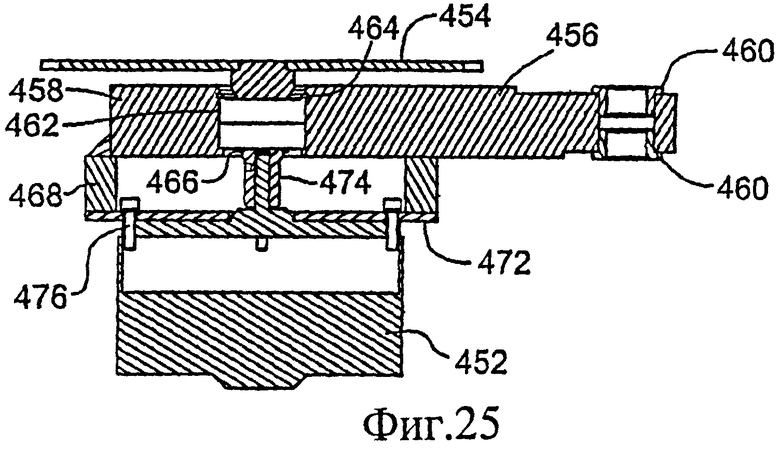
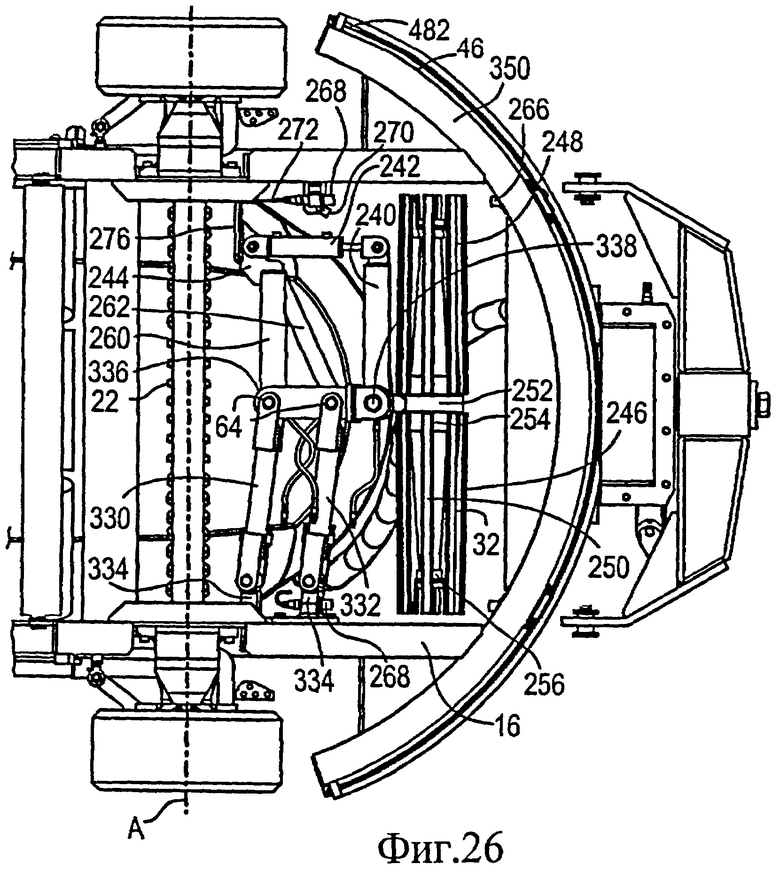
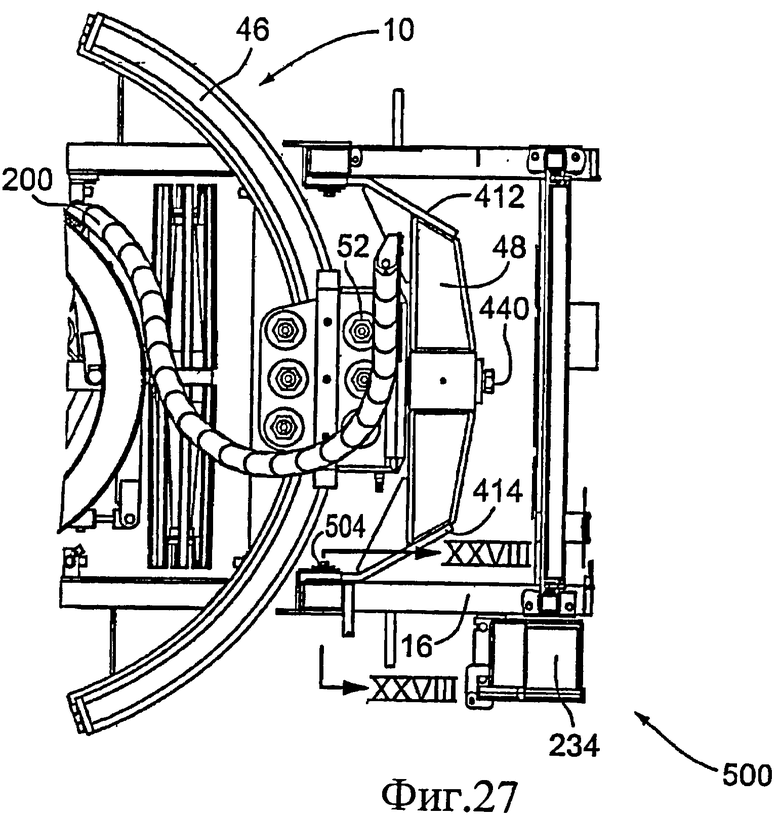
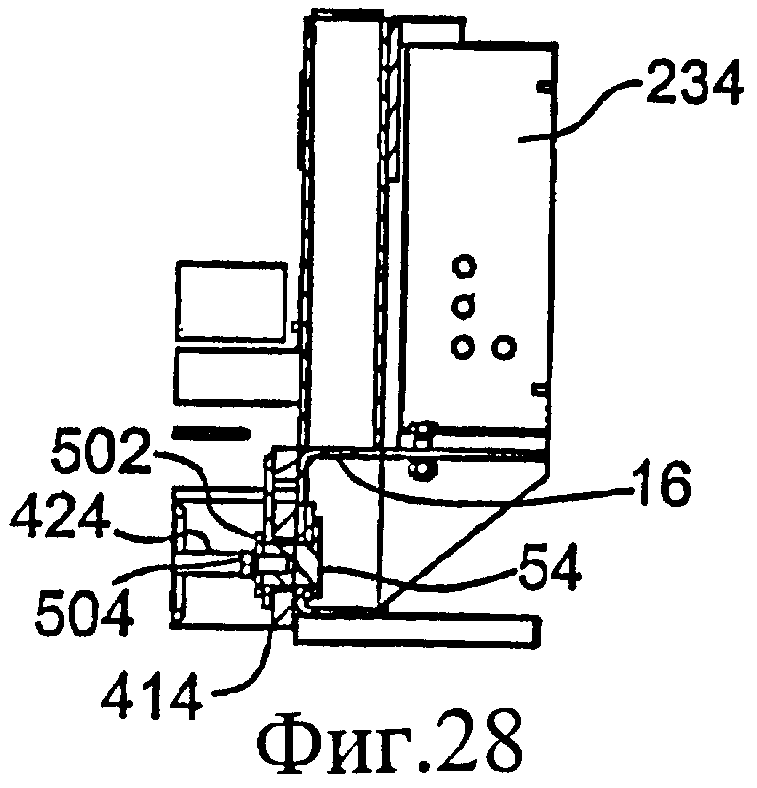
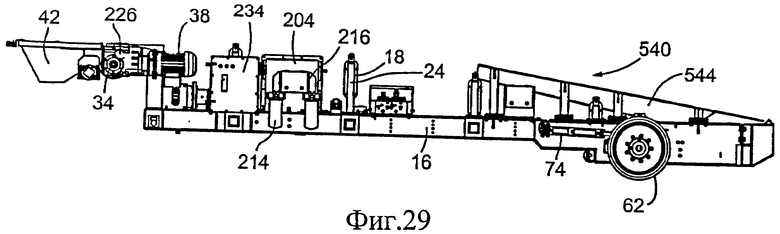
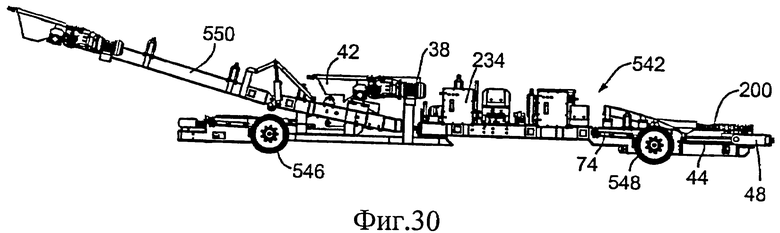
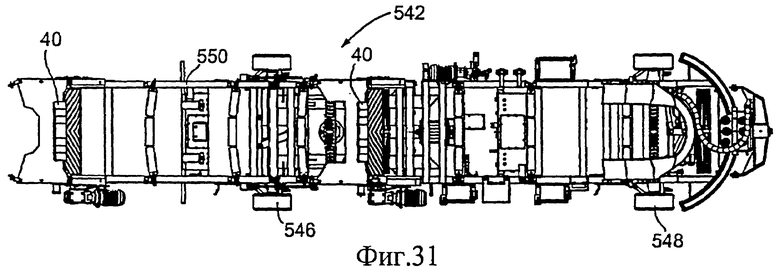
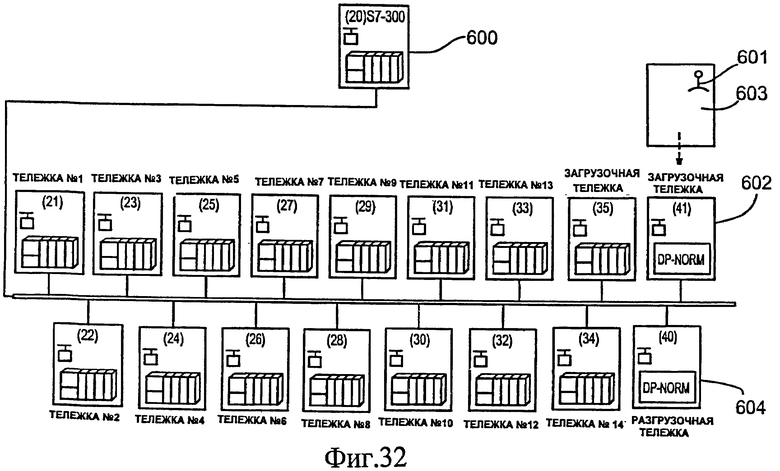
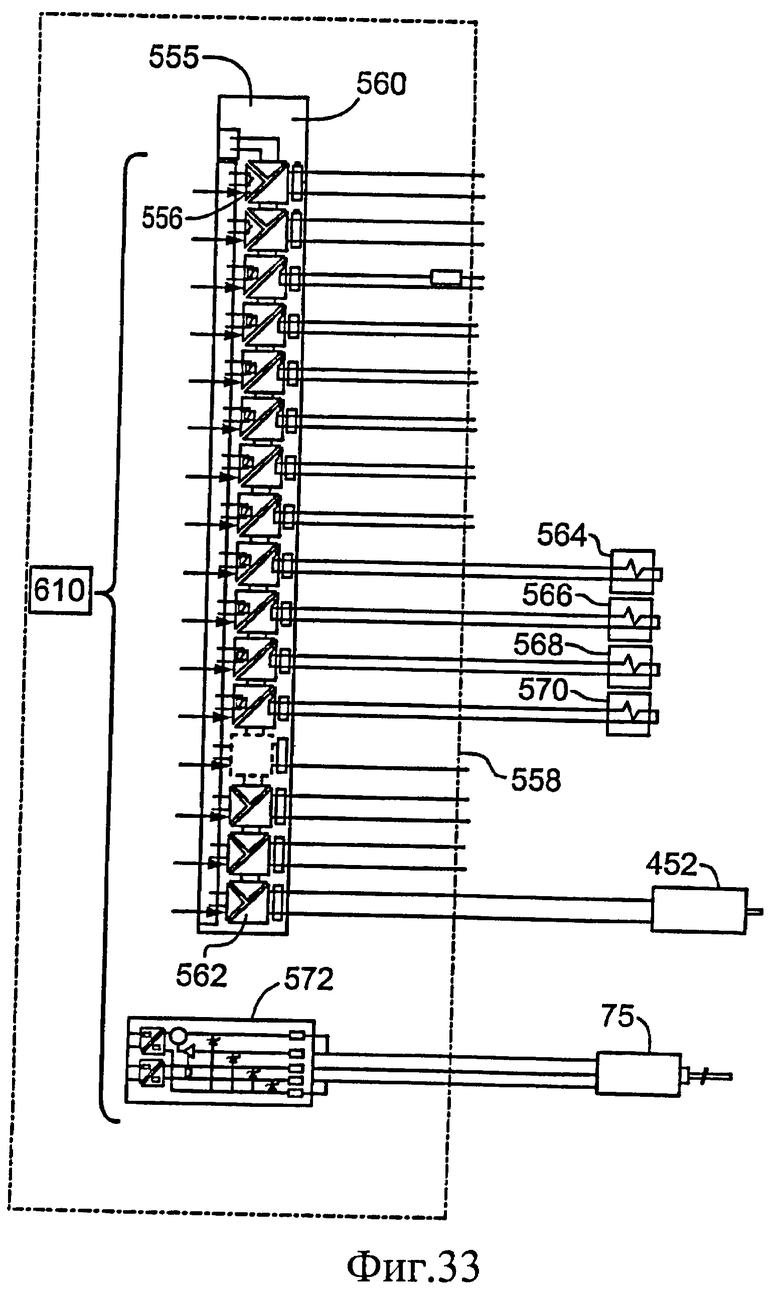
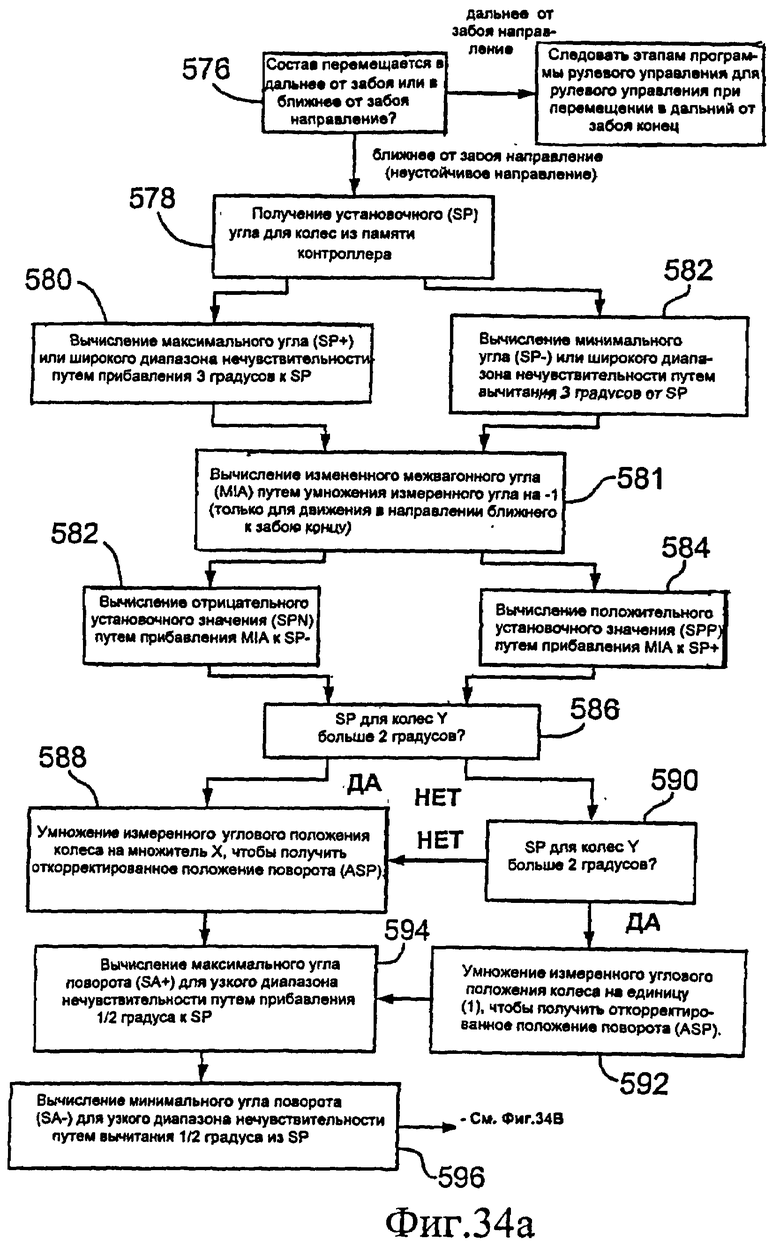
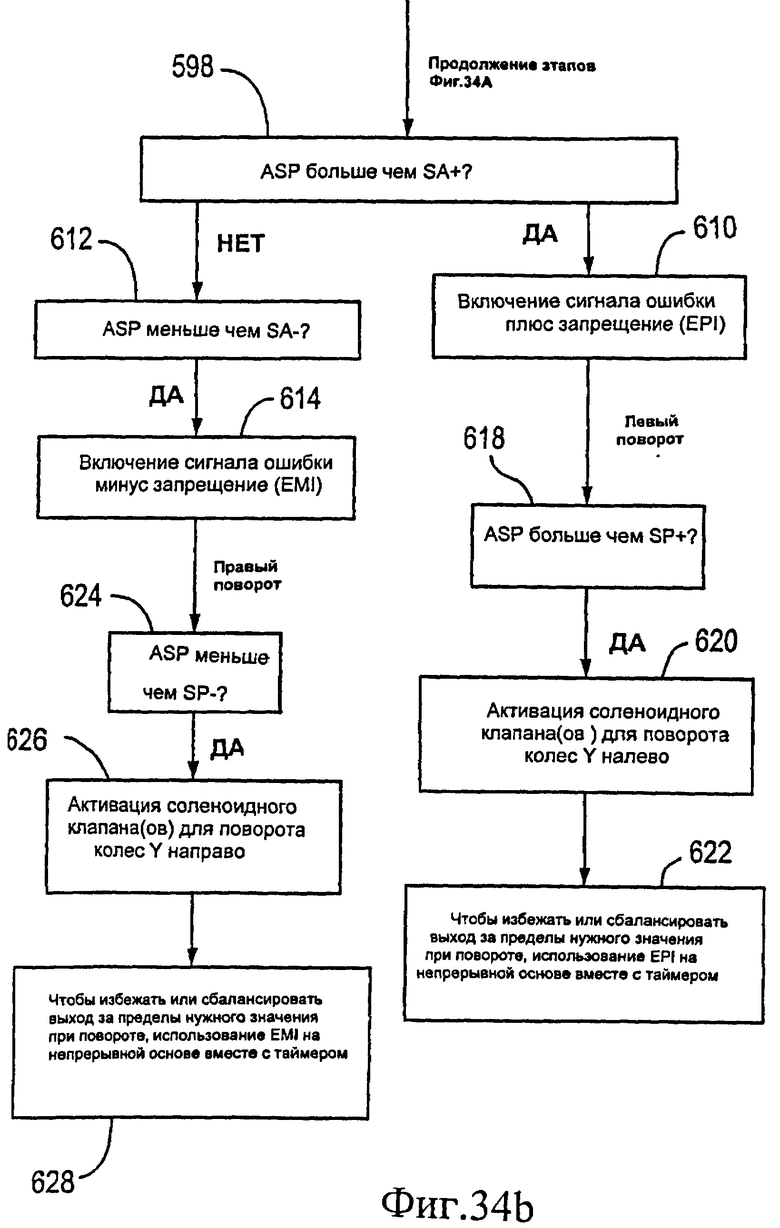
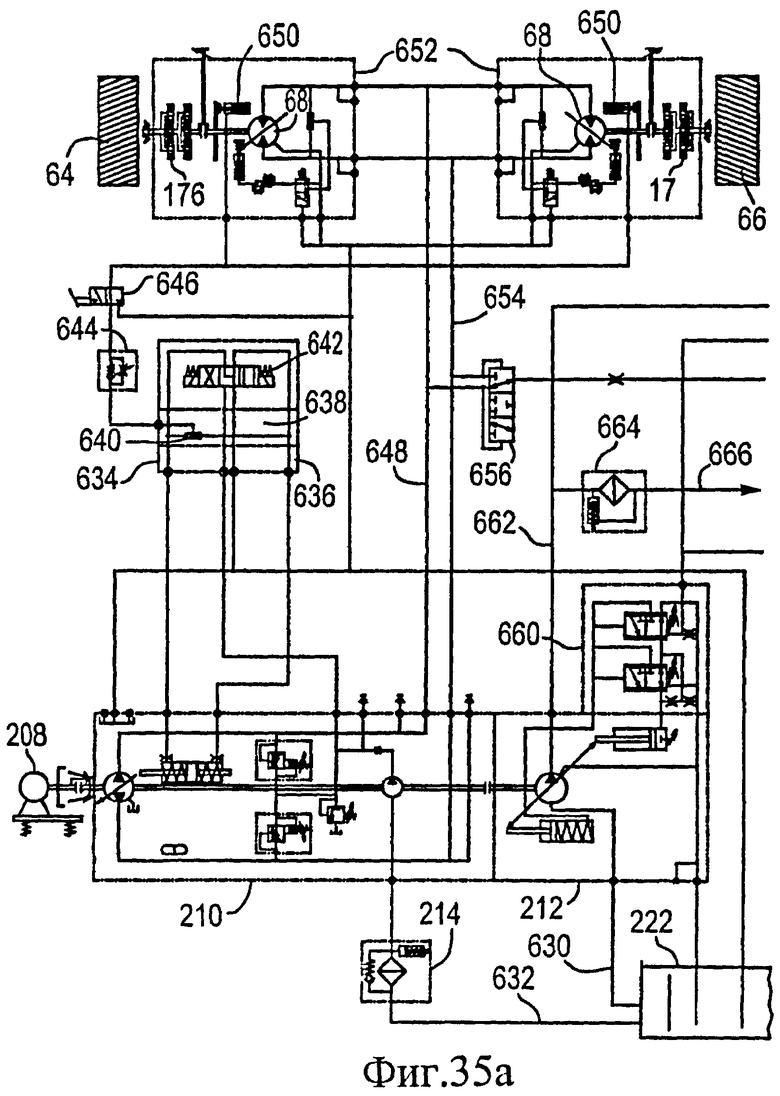
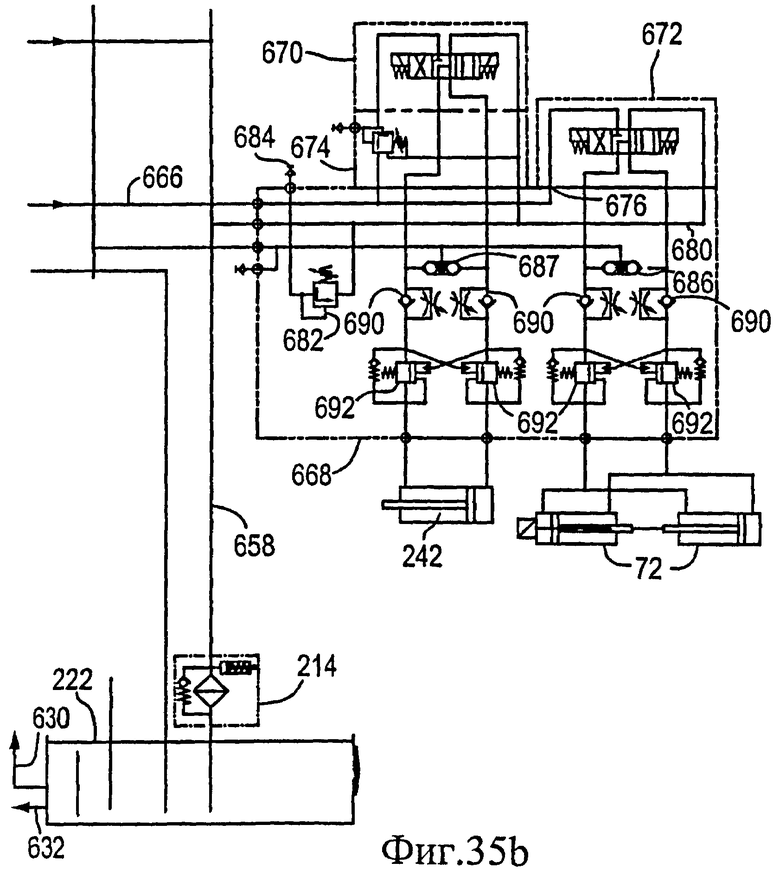
Изобретение относится к системам и способам рулевого управления для состава транспортных средств. Состав из трех транспортных средств, включающий в себя первое и второе концевые транспортные средства содержит систему рулевого управления, включающую в себя пару движущих устройств, совмещенных в поперечном направлении, силовой приводной механизм, две дополнительные пары движущих устройств, датчик угла, средство указания расстояния, средство определения текущего угла поворота, средство сохранения текущего угла поворота и генерации электрических сигналов, указывающих значение этого угла, средство передачи электрических сигналов, гидравлический двигатель, программируемый логический контроллер (ПЛК), датчик угла колеса. Каждое движущее устройство содержит колесо, выполненное с возможностью рулевого управления. Датчик угла содержит роликовую цепь и измерительную звездочку. Электрическая система контроллера (ПЛК) содержит блок памяти и электрический индикатор. Способ рулевого управления заключается в вычислении корректировок угла поворота, передаче показаний межвагонных углов к указанному ПЛК. Изобретение позволяет автоматически управлять большим количеством транспортных средств в низких горнодобывающих проходах. 3 н. и 17 з.п. ф-лы, 37 ил.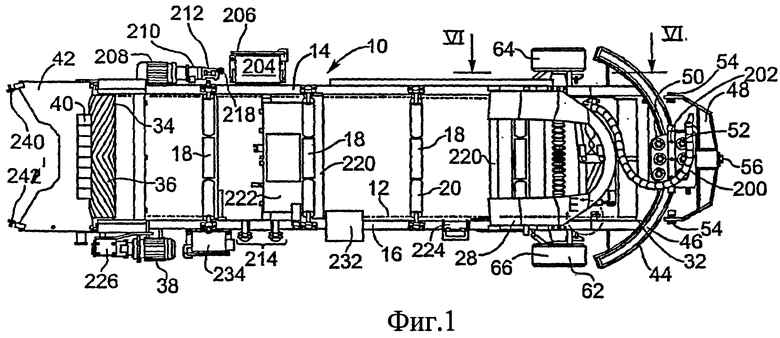
1. Система рулевого управления, выполненная с возможностью управления несколькими транспортными средствами, находящимися в составе, содержащая:
выбранную пару совмещенных в поперечном направлении движущих устройств, каждое из которых содержит выполненное с возможностью рулевого управления взаимодействующее с землей колесо, которое также выполнено с возможностью установки на противоположных сторонах одного из указанных транспортных средств;
первый силовой приводной механизм для осуществления рулевого управления указанной выбранной парой движущих устройств, когда состав перемещается по земле;
по меньшей мере две дополнительные пары совмещенных в поперечном направлении движущих устройств, причем каждая пара содержит два выполненных с возможностью рулевого управления взаимодействующих с землей колеса, соединена с одним или большим количеством дополнительных транспортных средств и поддерживает указанные дополнительные транспортные средства, причем каждое движущее устройство каждой дополнительной пары выполнено с возможностью установки на соответствующей одной из двух противоположных сторон ее соответствующего дополнительного транспортного средства;
второй силовой приводной механизм для осуществления рулевого управления каждой из таких дополнительных пар движущих устройств;
по меньшей мере один датчик угла для измерения выбранного межвагонного угла между указанной одной или каждой парой смежных транспортных средств и для генерации первого электрического сигнала, указывающего на значение этого угла, и
систему управления, предназначенную для управления каждым вторым силовым приводным механизмом для установки угла поворота каждой из указанных дополнительных пар движущих устройств, причем указанная система управления содержит средство указания расстояния, которое прошли колеса в составе от выбранного местоположения, средство определения текущего угла поворота каждой выбранной пары и указанных по меньшей мере двух дополнительных пар движущих устройств и генерации соответствующих вторых электрических сигналов, указывающих на значение этого угла, средство сохранения ряда углов поворота указанной выбранной пары, измеренных указанными средствами определения, когда состав транспортных средств перемещается по опорной поверхности, и средство передачи электрических сигналов рулевого управления к указанному второму силовому приводному механизму, для приведения в действие указанного второго силового приводного механизма и, таким образом, рулевого управления указанными дополнительными парами движущих устройств, при этом указанная система управления во время использования указанной системы рулевого управления регулирует текущий угол поворота каждой дополнительной пары до требуемого угла поворота на основании расстояния, пройденного составом из указанного выбранного местоположения, определенного текущего угла поворота соответствующей пары и измеренного межвагонного угла для соответствующей пары,
при этом указанный межвагонный угол для каждой пары смежных транспортных средств определяется центральными продольными осями соответствующей пары и точкой поворота, вокруг которой одна из соответствующих пар может поворачиваться относительно другого транспортного средства соответствующей пары в целом в горизонтальной плоскости.
2. Система по п.1, в которой каждое из указанных движущих устройств содержит гидравлический двигатель для приведения в действие соответствующего ему транспортного средства и невращающуюся опорную конструкцию для колеса для присоединения с возможностью отсоединения движущего устройства к основной конструкции соответствующего транспортного средства, которое является конвейерным транспортным средством.
3. Система по п.1, в которой указанный один или каждый датчик угла содержит натянутую роликовую цепь, проходящую горизонтально на криволинейной опоре для цепи, центр кривизны которой совмещен по вертикали с указанной точкой поворота, которая расположена на полпути между двумя движущими устройствами, и преобразователь положения вращения, выполненный с возможностью установки на механизме сцепки с возможностью шарнирного соединения соответствующей пары смежных транспортных средств вместе и имеющий измерительную звездочку, выполненную с возможностью взаимодействия с указанной роликовой цепью.
4. Система по п.1, в которой указанная система управления содержит программируемые логические контроллеры (ПЛК), причем соответствующий один из указанных ПЛК предусмотрен для установки на каждом транспортном средстве состава.
5. Система по п.2, в которой указанная система управления запрограммирована для установления диапазона нечувствительности для указанного требуемого угла поворота каждой дополнительной пары движущих устройств, причем указанный диапазон нечувствительности проходит на несколько градусов выше и несколько градусов ниже требуемого угла поворота, при этом указанная система управления только посылает рабочий сигнал в указанный второй силовой приводной механизм, чтобы отрегулировать текущий угол поворота соответствующей пары указанных движущих устройств, если текущий угол поворота для этой соответствующей пары находится за пределами указанного диапазона нечувствительности.
6. Система по п.1, в которой, когда состав перемещается в одном из двух возможных направлений, указанный один или каждый межвагонный угол умножается на «-1» указанной системой управления для обеспечения измененного межвагонного угла, который используется для вычисления величины корректировки угла поворота для дополнительной пары, связанной с этим межвагонным углом.
7. Система по п.6, в которой указанная система управления регулирует угол поворота каждой дополнительной пары, только если вычисленное значение корректировки угла поворота превышает заданную минимальную корректировку угла.
8. Система по п.1, в которой во время ее использования указанная система управления может регулировать текущий угол поворота на величину, которая компенсирует заданное смещение соответствующей дополнительной пары движущих устройств по мере их перемещения по земле.
9. Система по п.8, в которой во время ее использования указанная система управления только регулирует текущий угол поворота с обеспечением компенсации смещения соответствующей дополнительной пары, если требуемый угол поворота превышает заданный положительный угол или же меньше заданного отрицательного угла эквивалентной величины.
10. Система по любому из пп.1-9, в которой указанные транспортные средства представляют собой конвейерные транспортные средства, расположенные торец в торец со смежными транспортными средствами, соединенными друг с другом с возможностью поворота для совершения поворотного движения вокруг вертикальной оси поворота, причем каждая вертикальная ось поворота расположена на полпути между соответствующей одной из указанных дополнительных пар.
11. Способ рулевого управления составом по меньшей мере из трех соединенных вместе транспортных средств, включающий:
использование состава по меньшей мере из трех транспортных средств, содержащего первое и второе концевые транспортные средства и по меньшей мере одно промежуточное транспортное средство, причем каждое транспортное средство имеет по меньшей мере одну установленную на нем пару движущих устройств, поддерживающих транспортное средство, и каждое движущее устройство содержит колесо, выполненное с возможностью рулевого управления и с возможностью поворота вокруг, по существу, вертикальной оси для осуществления рулевого управления транспортным средством, при этом движущее устройство каждой пары установлено на противоположных сторонах соответствующего транспортного средства, а каждое транспортное средство дополнительно содержит силовой механизм рулевого привода для поворота колес указанной одной или каждой пары вокруг их соответствующих вертикальных осей и контроллер для управления работой указанного силового средства рулевого привода, чтобы осуществлять рулевое управление указанным составом, при этом смежные транспортные средства состава соединены с возможностью поворота друг с другом для выполнения поворотного движения вокруг, по существу, вертикальной оси поворота транспортного средства;
обеспечение перемещения указанного состава по земле в требуемом направлении к одному из указанных концевых транспортных средств;
осуществление рулевого управления ведущей парой колес указанного одного концевого транспортного средства на требуемый угол поворота;
измерение указанного требуемого угла поворота на непрерывной или частой периодической основе и передачу первых сигналов, указывающих на значение этого угла, указанному контроллеру;
сохранение ряда указанных требуемых углов поворота по мере продвижения состава по земле;
измерение на непрерывной или частой периодической основе текущего угла поворота для каждой пары колес, расположенных позади указанной ведущей пары колес относительно направления движения состава;
передачу индикации расстояния, пройденного составом от выбранного местоположения, указанному контроллеру;
передачу считываемых контроллером показаний межвагонных углов между парами смежных транспортных средств к указанному контроллеру, причем каждый межвагонный угол образован центральными продольными осями соответствующей пары транспортных средств и указанной осью поворота транспортного средства для соответствующей пары, и
вычисление корректировок угла поворота для ведомых пар указанных колес посредством указанного контроллера по мере перемещения состава, причем указанные корректировки угла поворота являются функцией следующего:
(i) расстояния, пройденного составом транспортных средств;
(ii) сохраненных требуемых углов поворота ведущей пары колес, причем контроллер выбирает сохраненный угол поворота для каждой ведомой пары, который представляет собой требуемый угол поворота, когда указанная ведущая пара колес находилась приблизительно в том же самом местоположении, где в настоящее время расположена соответствующая ведомая пара;
(iii) текущего межвагонного угла, связанного с соответствующей ведомой парой, причем этот межвагонный угол имеет определяющую его вертикальную ось, расположенную между соответствующей ведомой парой; и
(iv) текущего угла поворота каждой пары колес, расположенной позади указанной ведущей пары колес.
12. Способ по п.11, в котором указанный контроллер содержит программируемый логический контроллер (ПЛК) в каждом из указанных транспортных средств, причем указанные ПЛК содержат ведущий ПЛК и интеллектуальные ведомые ПЛК.
13. Способ по п.11, в котором на указанном этапе вычисления используют диапазон нечувствительности угла для каждого выбранного сохраненного угла поворота для каждой ведомой пары, причем указанный диапазон нечувствительности проходит от минимального установочного угла до максимального установочного угла.
14. Способ по п.11, в котором, когда указанный состав перемещается в одном из двух возможных направлений, на указанном этапе вычисления умножают каждый текущий межвагонный угол на «-1», чтобы получить модифицированный межвагонный угол, используемый для вычисления каждой корректировки угла поворота.
15. Способ по любому из пп.11-14, в котором на указанном этапе вычисления вычисляют скорректированное угловое положение для каждой пары ведомых колес путем умножения текущего угла поворота для соответствующей пары колес на заданную величину, которая компенсирует смещение соответствующей ведомой пары.
16. Система рулевого управления по меньшей мере для трех транспортных средств, соединенных вместе с формированием состава, причем смежные транспортные средства в указанном составе соединены с возможностью поворота друг с другом для осуществления поворотного перемещения вокруг, по существу, вертикальной оси, при этом каждое транспортное средство имеет пару выполненных с возможностью рулевого управления колес, установленных на нем и поддерживающих это транспортное средство, причем пары выполненных с возможностью рулевого управления колес содержат выбранную ведущую пару, установленную на одном из указанных транспортных средств, расположенном в одном конце состава, и указанная ведущая пара имеет угол поворота, определяемый оператором, управляющим устройством рулевого управления для указанной ведущей пары во время использования системы рулевого управления, а каждое транспортное средство имеет приводной механизм для рулевого управления его соответствующей парой колес, которые установлены на противоположных сторонах транспортного средства, при этом указанная система содержит:
электрическую систему контроллера для автоматического рулевого управления всеми парами колес, расположенными позади указанной ведущей пары, причем указанная система контроллера содержит блок памяти для хранения измеренных данных и электрический индикатор для создания сигнала, указывающего текущее расстояние, пройденное составом из заданного местоположения;
угловые датчики транспортного средства для измерения выбранных межвагонных углов между смежными транспортными средствами, создания первых электрических сигналов, указывающих на значения этих углов, и передачи таких первых электрических сигналов указанной системе контроллера, причем межвагонный угол представляет собой угол, ограниченный центральными продольными осями соответствующей пары смежных транспортных средств и указанной, по существу, вертикальной оси, вокруг которой одна из соответствующих пар может поворачиваться относительно другого транспортного средства пары;
первый датчик угла колеса для подачи электрического сигнала, указывающего на текущий угол поворота указанной выбранной ведущей пары колес, указанной системе контроллера, причем указанный блок памяти выполнен с возможностью хранения ряда измеренных углов поворота для выбранной ведущей пары каждого из сохраненных углов поворота, соответствующих углу поворота ведущей пары в ряде местоположений вдоль пути движения указанного состава;
дополнительные датчики угла колеса для измерения фактических углов поворота указанных пар колес, расположенных позади такой ведущей пары, и для подачи электрических сигналов, указывающих на значения этих углов, указанной системе контроллера;
при этом указанная система контроллера во время использования указанной системы рулевого управления осуществляет корректировку фактического угла поворота для каждой ведомой пары колес до требуемого угла поворота, а система контроллера вычисляет величину корректировки для каждой ведомой пары на основе следующих параметров:
(i) текущего расстояния, пройденного составом;
(ii) соответствующего одного из сохраненного ряда измеренных углов поворота, при этом указанный контроллер выбирает указанный соответствующий один из углов поворота, представляющий собой угол поворота ведущей пары колес, когда указанная ведущая пара находилась приблизительно в текущем местоположении соответствующей ведомой пары; и
(iii) текущего межвагонного угла, связанного с соответствующей ведомой парой, причем этот межвагонный угол имеет определяющую его вертикальную ось, расположенную вблизи соответствующей ведомой пары.
17. Система по п.16, в которой корректировка указанного фактического угла поворота соответствующей одной из ведомых пар осуществляется только если требуемый угол поворота либо больше, чем небольшая положительная заданная величина, либо меньше, чем небольшая отрицательная величина, равная указанной положительной заданной величине, умноженной на «-1».
18. Система по п.16, в которой каждый датчик угла транспортного средства содержит натянутую роликовую цепь, проходящую горизонтально на опоре для цепи, образующей круговую дугу, центр кривизны которой совмещен по вертикали, по существу, с вертикальной осью, для выполнения поворотного движения между соответствующей парой смежных транспортных средств, и преобразователь положения вращения, установленный на сцепном механизме для соединения с возможностью поворота соответствующей пары смежных транспортных средств вместе и имеющий чувствительную звездочку, расположенную с возможностью взаимодействия с указанной роликовой цепью.
19. Система по п.16, в которой указанная система контроллера содержит программируемый логический контроллер (ПЛК) для каждого из указанных транспортных средств, причем каждый ПЛК выполнен с возможностью установки на соответствующем одном из транспортных средств, при этом указанные ПЛК содержат ведущий ПЛК и интеллектуальные ведомые ПЛК.
20. Система по любому из пп.16-19, в которой указанная система контроллера запрограммирована для вычисления величины корректировки для каждой ведомой пары путем ряда вычислений, которые включают вычисление скорректированного положения угла поворота для каждой ведомой пары путем умножения фактического угла поворота для соответствующей пары на заданную величину, которая компенсирует смещение соответствующей ведомой пары.
| US 5366059 A, 22.11.1994 | |||
| Система для управления колесами прицепного звена автопоезда | 1990 |
|
SU1761576A1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| Система рулевого управления автопоезда | 1987 |
|
SU1474016A1 |
| ЭЛЕКТРОПРОВОДЯЩАЯ ПАРААРАМИДНАЯ ПУЛЬПА | 2002 |
|
RU2265680C2 |
| Устройство для разложения озона | 1980 |
|
SU895923A1 |
| EP 0092952 A1, 02.11.1983 | |||
| WO 03087960 A2, 23.10.2003. | |||

