ОБЛАСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к системе ультразвуковой визуализации и способу измерения расстояния между первой точкой и второй точкой в трехмерном ультразвуковом изображении объемной области, например анатомической области пациента. Настоящее изобретение дополнительно относится к компьютерной программе, реализующей данный способ.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
В трехмерной ультразвуковой визуализации, или объемной визуализации, получение трехмерного изображения осуществляется путем проведения множественных двумерных сканирований интересующего объема. Таким образом набирается массив двумерных изображений, лежащих друг над другом. При надлежащей обработке изображения трехмерное изображение может быть получено из массива двумерных изображений. Трехмерная информация, полученная из массива двумерных изображений, демонстрируется в правильной форме на дисплее для пользователя ультразвуковой системы.
Далее, в трехмерной ультразвуковой визуализации часто требуется производить измерения анатомических структур внутри исследуемой объемной области. Для удобства пользователя возможность измерений имеется в системах трехмерной визуализации, где пользователь может проводить измерения напрямую на обработанном изображении трехмерного объема, содержащего эти анатомические структуры. Такой способ измерения “на стекле” является очень простым и удобным для пользователя. Однако этот способ подвержен так называемому эффекту “заваливания”. Если измеряемые структуры располагаются не в плоскости проецируемого изображения трехмерной объемной области, то измеренное расстояние между структурами, показанными на экране, оказывается меньше, чем действительное расстояние между структурами в реальном трехмерном пространстве.
Поэтому мы рассмотрели ультразвуковые системы и способы проведения измерений в трехмерных ультразвуковых изображениях. В заявке США 2011/0066031 A1 описаны варианты осуществления ультразвуковой системы с возможностью трехмерных измерений и модулем захвата ультразвуковой информации, способный передавать ультразвуковые сигналы к целевому объекту и регистрировать сигналы ультразвукового эха, отраженные от целевого объекта, для сбора ультразвуковой информации. Кроме того, известное решение включает пользовательский интерфейс, позволяющий принимать входные данные от пользователя, и процессор, позволяющий формировать трехмерное ультразвуковое изображение на основе объемных данных, полученных при обработке ультразвуковой информации, запоминать две и более точек на трехмерном ультразвуковом изображении согласно входным данным, генерировать информацию о связи между запомненными двумя и более точками на трехмерном ультразвуковом изображении, и измерять расстояния между двумя и более запомненными точками согласно входным данным и информации о связи между точками.
Дополнительно, документ JP 3325224 раскрывает оборудование для ультразвуковой диагностической визуализации, позволяющее выполнять наблюдение и обследование.
Существует необходимость дальнейшего улучшения подобных трехмерных ультразвуковых систем.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Целью настоящего изобретения является разработка улучшенной ультразвуковой системы и способа ее использования. Дополнительной целью настоящего изобретения является разработка компьютерной программы, реализующей данный способ.
В первом аспекте настоящего изобретения представлена система ультразвуковой визуализации для обеспечения трехмерного изображения исследуемого объема. Система ультразвуковой визуализации включает матрицу первичных измерительных преобразователей, выполненную с возможностью формировать входной ультразвуковой сигнал, модуль управления, выполненный с возможностью принимать входной ультразвуковой сигнал и формировать данные отображения, представляющие трехмерное изображение на дисплее, где модуль управления дополнительно выполнен с возможностью определять расстояние между первой точкой и второй точкой, заданными на трехмерном изображении, дисплей выполнен с возможностью принимать отображаемые данные и формировать трехмерное изображение объема и имеет указатель (курсор) для идентификации первой точки и второй точки, и входное устройство выполнено с возможностью обеспечивать входные данные модулю управления, где входные данные включают перемещение указателя, и где система ультразвуковой визуализации обеспечивает возможность первичного перемещения указателя в плоскости трехмерного изображения, показанной на дисплее, и вторичного перемещения указателя перпендикулярно этой плоскости, при этом система ультразвуковой визуализации дополнительно выполнена с возможностью обеспечения индикации совмещения указателя со структурой в пределах объемной области.
В дополнительном аспекте настоящего изобретения представлен способ определения расстояния между первой точкой и второй точкой трехмерного ультразвукового изображения объемной области. Способ содержит следующие этапы: отображение трехмерного ультразвукового изображения на дисплее, а также указателя для определения первой точки и второй точки, перемещение указателя согласно входным данным параллельно плоскости, показанной на дисплее, для определения первой координаты и второй координаты, по меньшей мере, одной из точек, соответствующих первой или второй точке, перемещение указателя согласно входным данным перпендикулярно плоскости, выведенной на дисплей, для определения третьей координаты соответствующей точки, обеспечение индикации совмещения указателя со структурой внутри исследуемой объемной области, и определение расстояния между первой точкой и второй точкой.
В дополнительном аспекте настоящего изобретения представлена компьютерная программа, включающая средство программного кода, инициирующее выполнение этапов указанного способа компьютером, когда вышеупомянутая компьютерная программа выполняется на компьютере.
Основная идея изобретения состоит в устранении эффекта “заваливания” путем предоставления пользователю возможности разместить указатель для измерений непосредственно в объемной области, чтобы затронуть измеряемые структуры трехмерного изображения.
Таким образом решена проблема невозможности поместить указатель вне плоскости, показанной на экране. Помимо того, пользователю нет необходимости активно вращать трехмерную область для того, чтобы найти ракурс, в котором можно установить указатель в правильную позицию, путем нажатия на структуру в трехмерной области. Вместо этого пользователю достаточно сначала позиционировать указатель на срезе трехмерной области, показанном на дисплее, а затем “погружать” указатель в исследуемую объемную область, до тех пор, пока он не коснется структуры.
Пользователю предоставлена возможность позиционирования указателя по всей глубине, например, по оси z, в дополнение к шаровому манипулятору, используемому для позиционирования указателя по осям, представленным на дисплее, например по осям x и y. После определения позиции первой точки или второй точки на плоскости, например, с помощью шарового манипулятора, пользователь позиционирует указатель по всей глубине, чтобы опустить указатель вглубь исследуемого объема. После того, как обе точки определены таким образом, система ультразвуковой визуализации вычисляет реальное трехмерное расстояние между точками. В таком случае, система ультразвуковой визуализации показывает измеренное расстояние на дисплее как измерение “Длина”.
Благодаря этому можно быть уверенным, что первая и вторая точка касаются структуры, а не «плавают» где-то в исследуемой объемной области. Таким образом, эффект “заваливания” невозможен.
Предпочтительные варианты осуществления раскрыты в зависимых пунктах формулы изобретения. Следует понимать, что заявленный способ имеет предпочтительные варианты осуществления, аналогичные и/или идентичные таковым для заявленного устройства и раскрытые в дополнительных пунктах формулы изобретения.
В одном из вариантов осуществления система ультразвуковой визуализации выполнена с возможностью осуществлять вторичное перемещение указателя после того, как первичное перемещение завершено. При этом пользователь сначала имеет возможность перемещать указатель в плоскости, показанной на дисплее. Если надлежащее положение достигнуто, пользователь может зафиксировать это положение, и таким образом, определить первую и вторую координату первой или второй точки. Затем пользователь может перемещать указатель (курсор) перпендикулярно плоскости, чтобы позиционировать указатель так, чтобы он касался надлежащим образом измеряемой структуры. Таким образом пользователь определяет третью координату. Поскольку первую и вторую координаты можно зафиксировать на время вторичного перемещения указателя, выравнивание и ориентирование указателя внутри трехмерного изображения упрощены.
В дополнительном варианте осуществления система ультразвуковой визуализации выполнена с возможностью осуществлять вторичное и первичное перемещение одновременно. При этом позиционирование указателя может быть ускорено, однако требуется более тщательная навигация в трехмерной области изображения.
В дополнительном варианте осуществления система ультразвуковой визуализации выполнена с возможностью осуществлять вторичное перемещение автоматически. При этом первичное и вторичное перемещение осуществляются последовательно. Однако это можно осуществить также в случае, когда вторичное перемещение происходит одновременно с первичным перемещением. Один из вариантов осуществления автоматического вторичного перемещения заключается в обнаружении совмещения указателя и структуры, которая позволяет определить первое касание указателем структуры в трехмерной области, начиная с плоскости, в которой происходит первичное перемещение. Другими словами, система ультразвуковой визуализации автоматически перемещает указатель вниз вдоль третьей оси и обнаруживает первую точку совмещения указателя и структуры. В случае, если вторичное перемещение осуществляется после первичного, пользователю предоставляется возможность активировать автоматическое вторичное перемещение посредством устройства ввода, например нажатием соответствующей кнопки. Дополнительно, пользователю может предоставляться возможность ручной корректировки локализации точки совмещения. В случае одновременного вторичного и первичного перемещения пользователь может оставить активированным автоматическое вторичное перемещение во время осуществления первичного перемещения, т.е. при изменении первой и второй координаты. Соответствующая третья координата в таком случае будет определена непрерывно. Третья координата может отображаться пользователю. Преимущество в данном случае состоит в том, что пользователь имеет возможность отслеживать форму поверхности, осуществляя первичное перемещение указателя. Это может дать лучшее представление о трехмерной форме структуры, показанной на дисплее.
В дополнительном варианте осуществления система ультразвуковой визуализации позволяет также осуществлять индикацию попадания указателя в область структуры в объемной области. В этом случае позиционирование первой и второй точек внутри объема еще более упрощено. При использовании любой достаточной индикации, такой как визуальная индикация, звуковая индикация или тактильная индикация, пользователь может позиционировать указатель в плоскости, показанной на дисплее, в ходе первичного перемещения указателя. Затем, вторичное перемещение может осуществляться без необходимости смены перспективы, показанной на дисплее. Поскольку индикация происходит в случае, когда указатель касается или совмещается со структурой, например, анатомической структурой внутри объемной области, пользователь может осуществлять вторичное перемещение указателя, несмотря на то что структура не видна на дисплее, так как вторичное перемещение представляет собой просто перемещение перпендикулярно показанной плоскости. Это еще более упрощает ввод данных в систему ультразвуковой визуализации и проведение измерений при наблюдениях объемной области.
В дополнительном варианте осуществления индикация представляет собой визуальную индикацию, показанную на дисплее. В этом случае пользователь, перемещая указатель с помощью устройства ввода и наблюдая за дисплеем, легко может распознать визуальную индикацию, которая также показана на дисплее. Поскольку дисплей уже включен в состав системы ультразвуковой визуализации, для обеспечения визуальной индикации нет необходимости в дополнительных средствах.
В дополнительном варианте осуществления визуальная индикация представляет собой изменение внешнего вида указателя или появление на дисплее метки. Изменение внешнего вида указателя может упростить детекцию совмещения указателя со структурой. Поскольку пользователь, несомненно, наблюдает за указателем во время его правильного позиционирования, он мгновенно распознает изменение его формы. В качестве альтернативы, на дисплее может возникать метка. Метка может представлять собой любой символ или фразу, подходящую для индикации совмещения указателя и структуры. Например, метка может представлять собой восклицательный знак или фразу "касание структуры", появляющуюся в части дисплея. Наконец, визуальная индикация может представлять собой световой сигнал, в частности, цветной, включаемый в случае совмещения указателя со структурой.
В дополнительном варианте осуществления изменение внешнего вида указателя вызывает подсветку указателя или его исчезновение. В частности, когда указатель достигает структуры, механизм линий невидимого контура заставляет указатель исчезнуть внутри области структуры, предоставляя пользователю визуальную индикацию касания указателем структуры. В качестве альтернативы, указатель может подсвечиваться при его нахождении внутри области структуры. Этим достигается легко распознаваемое изменение внешнего вида указателя.
В дополнительном варианте осуществления визуальная индикация представляет собой изменение внешнего вида структуры внутри объемной области. Ввиду того, что структура, как правило, значительно больше указателя, изменение внешнего вида структуры может служить еще более явной визуальной индикацией касания указателем структуры. Изменение внешнего вида структуры может осуществляться, например, как изменение цвета ткани или структуры, соответственно. Другие примеры включают изменение яркости структуры дополнительно или альтернативно к изменению цвета. Кроме того, структура может также начать пульсировать при ее касании указателем. Подобная пульсация может, например, осуществляться в виде динамического изменения цвета и/или яркости структуры.
В дополнительном варианте осуществления система ультразвуковой визуализации дополнительно содержит динамик, и индикация представляет собой аудиосигнал, издаваемый динамиком. Дополнительно или альтернативно к визуальной индикации, пользователю может предоставляться звуковая индикация. В этом случае пользователь может производить вторичное перемещение указателя, даже не наблюдая за дисплеем. Когда указатель касается структуры, шумовой или тоновый сигнал служит индикатором правильного позиционирования указателя.
В дополнительном варианте осуществления индикация представляет собой тактильную индикацию, осуществляемую посредством устройства ввода. Дополнительно или альтернативно к визуальной или звуковой индикации, может предоставляться возможность тактильной индикации. Например, устройство ввода может осуществлять вибрирующие движения в момент касания указателем структуры в объемной области. Аналогично, в этом случае пользователь может управлять вторичным перемещением указателя, даже не глядя на дисплей. Как только указатель касается структуры, пользователь получает быструю и немедленную индикацию.
В дополнительном варианте осуществления ультразвуковая система позволяет вводить траекторию измерения, соединяющую первую точку и вторую точку, вдоль которой определяется расстояние между точками. Таким образом, в дополнение к простому измерению расстоянию “от точки к точке”, допустимы также измерения расстояний вдоль разнообразных траекторий измерения.
В дополнительном варианте осуществления ультразвуковая система позволяет вводить траекторию измерения путем ввода, по меньшей мере, одной дополнительной точки внутри исследуемого объема и/или путем выбора геометрической формы линии, соединяющей первую точку и вторую точку. Например, пользователь может определить траекторию измерения путем задания соединительных точек. Также можно использовать стандартные геометрические формы, такие как эллипсы, фрагменты окружностей и сплайн-функции второго и высшего порядков.
В дополнительном варианте осуществления система дополнительно содержит устройство формирования луча, позволяющее матрице первичных измерительных преобразователей сканировать объемную область вдоль нескольких линий сканирования и дополнительно позволяющее принимать входной ультразвуковой сигнал и формировать сигнал изображения, блок обработки сигнала, позволяющий принимать сигнал изображения и формировать данные изображения, и блок обработки изображения, позволяющий принимать данные изображения от блока обработки сигнала и формировать данные, отображаемые на дисплее. Этим достигается надлежащая обработка сигнала, а также контролируемый захват и отображение трехмерного изображения объемной области.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Эти и другие аспекты изобретения наглядно освещены в соответствии с вариант(ами) осуществления, описываемыми ниже в настоящем документе. На следующих чертежах
Фиг. 1 показывает схему системы ультразвуковой визуализации согласно варианту осуществления;
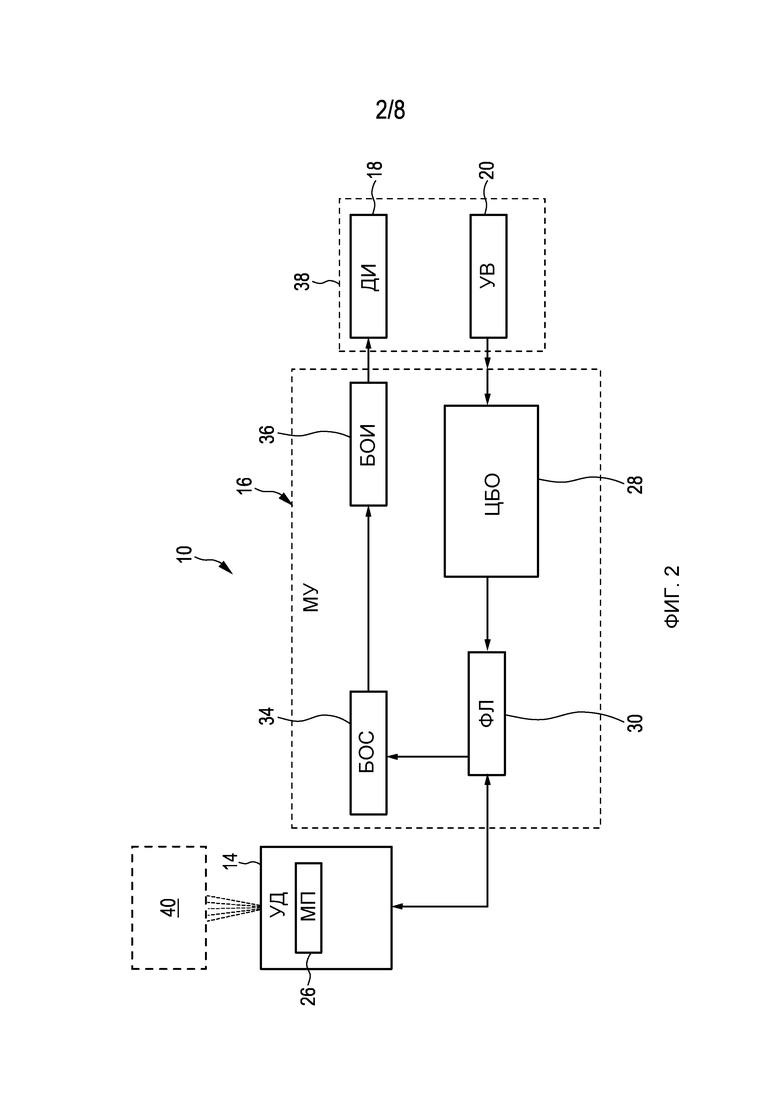
Фиг. 2 показывает блок-схему системы ультразвуковой визуализации согласно модификации ультразвуковой системы, представленной на Фиг. 1;
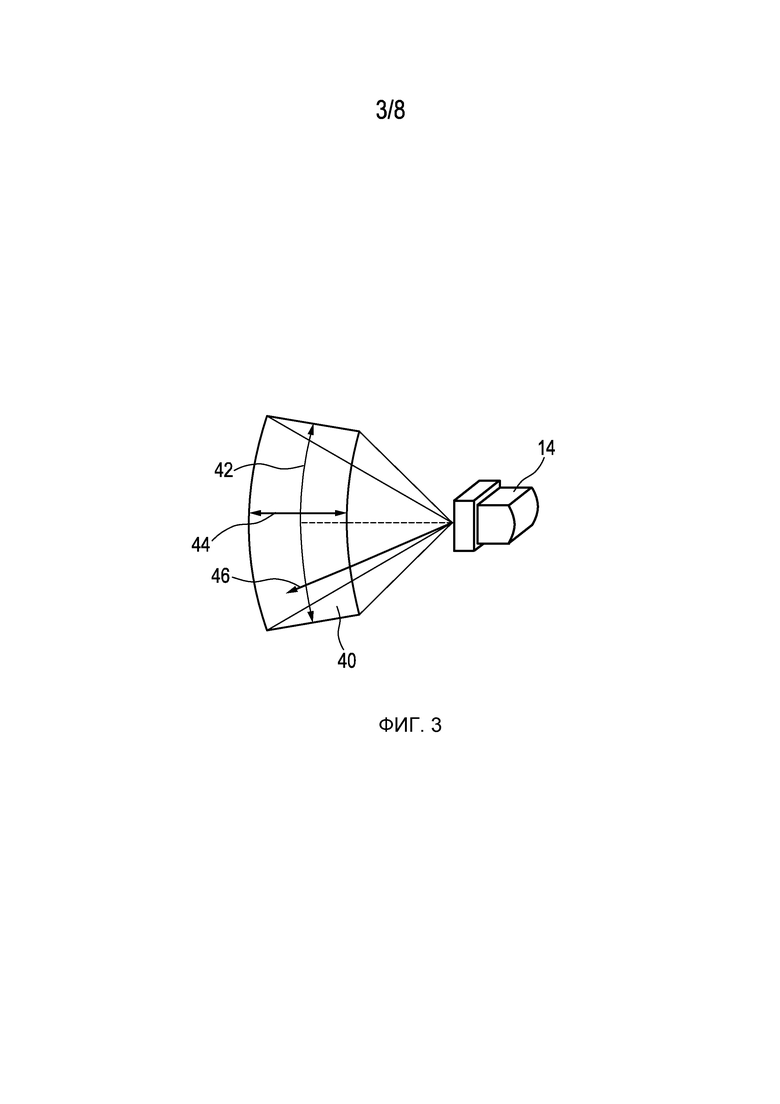
Фиг. 3 показывает схематическое представление иллюстративного объема по отношению к ультразвуковому датчику;
Фиг. 4a и Фиг. 4b показывают измерение расстояния между двумя точками в одной плоскости согласно предшествующему уровню техники;
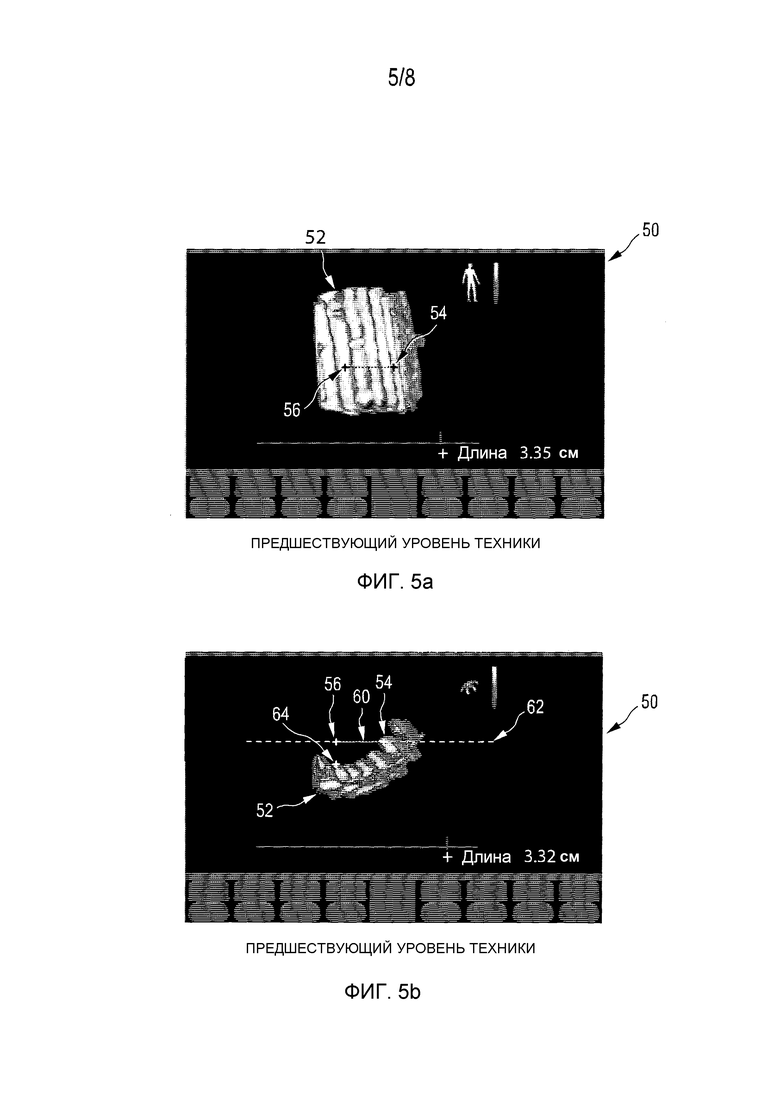
Фиг. 5a и Фиг. 5b показывают измерение расстояния между двумя точками, лежащими в разных плоскостях и появление эффекта “заваливания”;
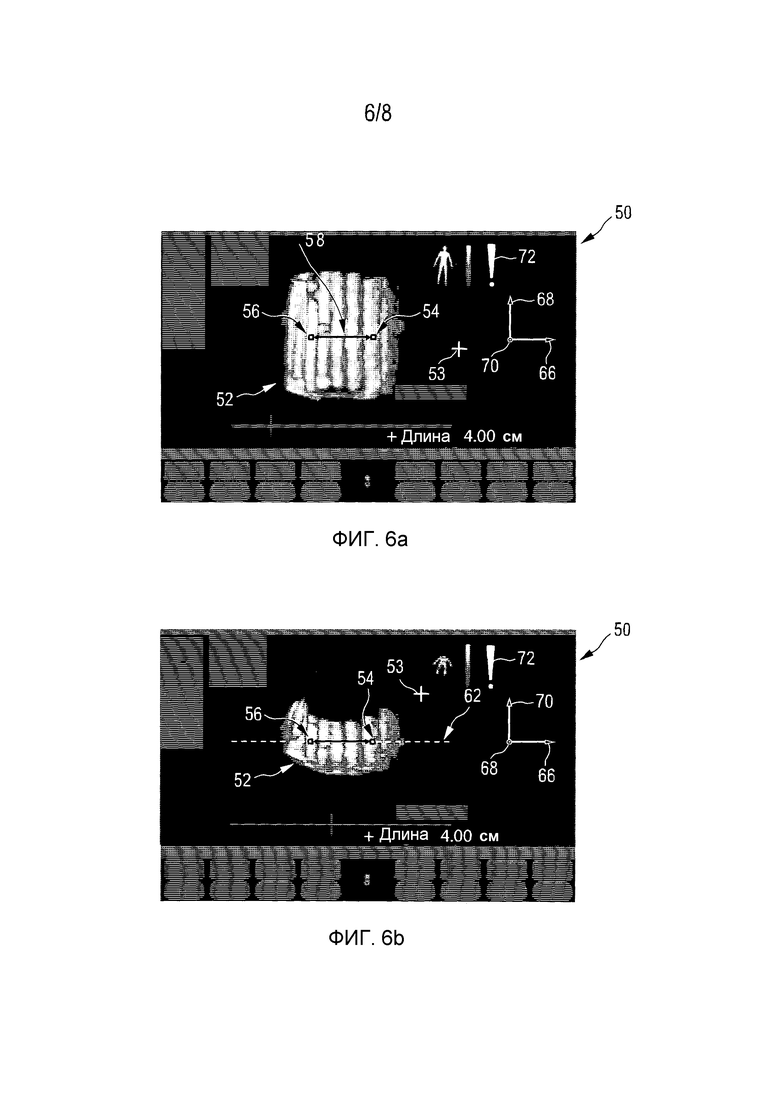
Фиг. 6a и Фиг. 6b показывают измерение расстояния между двумя точками, лежащими в разных плоскостях согласно варианту осуществления;
Фиг. 7a и Фиг. 7b показывают измерение расстояния между двумя точками, лежащими в разных плоскостях согласно варианту осуществления, позволяющему избежать эффекта “заваливания”;
Фиг. 8 показывает функциональную диаграмму способа согласно варианту осуществления.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
На Фиг. 1 показана схема ультразвуковой системы 10 согласно варианту осуществления, в частности, медицинской системы ультразвуковой визуализации. Ультразвуковая система 10 применяется для обследования некоторого объема анатомической области, в частности, анатомической области пациента 12. Ультразвуковая система 10 включает ультразвуковой датчик 14, имеющий, по меньшей мере, одну матрицу преобразователей, имеющую множество первичных измерительных преобразователей для передачи и/или приема ультразвуковых волн. В одном из примеров каждый первичный измерительный преобразователь может передавать ультразвуковые волны в форме, по меньшей мере, одного передаваемого импульса заданной продолжительности, в частности, множество последовательных передаваемых импульсов. Первичные измерительные преобразователи (элементы) могут быть организованы в виде одномерного ряда, например, для формирования двумерного изображения, которое может механически перемещаться и вращаться вокруг оси. Кроме того, преобразовательные элементы могут быть организованы в виде двумерной матрицы, в частности, для формирования многослойного или трехмерного изображения.
В основном, массив двумерных изображений, каждое из которых соответствует конкретной акустической линии, или линии сканирования, в частности приемной линии сканирования, можно получать тремя различными способами. Во-первых, пользователь может получать множество изображений, сканируя вручную. В этом случае ультразвуковой датчик (зонд) может включать устройства определения положения, следящие за позицией и ориентацией линий сканирования или плоскостей сканирования. Однако на данный момент мы не рассматриваем этот вариант. Во-вторых, преобразовательный элемент может быть автоматически механически просканирован внутри ультразвукового датчика. Это возможно в случае, если используется одномерный массив преобразовательных элементов. В-третьих, и это предпочтительный вариант, внутри ультразвукового датчика может располагаться двумерная фазированная матрица преобразователей, и ультразвуковые лучи сканируются с помощью электроники. Ультразвуковой датчик может держать в руке пользователь системы, например медицинский персонал или врач. Ультразвуковой датчик 14 используется для обследования пациента 12, так что в итоге мы получаем изображение анатомической области пациента 12.
Далее, ультразвуковая система 10 имеет модуль 16 управления, контролирующий получение трехмерного изображения с помощью ультразвуковой системы 10. Как будет объяснено далее, модуль 16 управления контролирует не только сбор данных через матрицу преобразователей ультразвукового датчика 14, но также и обработку сигнала и изображения, в результате которой формируется трехмерное изображение на основе эха от ультразвуковых лучей, зарегистрированного матрицей преобразователей ультразвукового датчика 14.
Ультразвуковая система 10 дополнительно содержит дисплей 18 для отображения трехмерных изображений пользователю. Далее, имеется устройство 20 ввода, включающее клавиши или клавиатуру 22 и дополнительные устройства ввода, например шаровой манипулятор 24. Устройство ввода может подсоединяться к дисплею 18 или напрямую к модулю 16 управления.
На Фиг. 2 показана блок-схема ультразвуковой системы 10. Как уже указывалось выше, ультразвуковая система 10 включает ультразвуковой датчик (УД) 14, модуль 16 управления (МУ), дисплей (ДИ) 18 и устройство 20 ввода (УВ). Кроме того, как упомянуто выше, датчик 14 включает фазированную двумерную матрицу 26 преобразователей. Как правило, модуль 16 управления (МУ) может включать центральный блок 28 обработки, содержащий аналоговые и/или цифровые электронные контуры, процессор, микропроцессор и т.п., позволяющие координировать процессы захвата и формирования изображения. Однако необходимо понимать, что центральный блок 28 обработки необязательно должен представлять собой отдельный модуль в составе ультразвуковой системы 10. Он может входить в состав модуля 16 управления, и, как правило, реализован аппаратно или программно. Настоящее разделение сделано лишь с целью иллюстрации.
Центральный блок 28 обработки как часть модуля 16 управления может управлять формирователем луча и, соответственно, тем, какие изображения объемной области 40 получены и каким способом. Формирователь 30 луча генерирует напряжение, подаваемое на матрицу преобразователей 26, определяет частоту повторяемости импульсов, сканирует, фокусирует и аподизирует передаваемый луч, а также приемный луч (или лучи), и может дополнительно усиливать фильтрацию и оцифровывать обусловленные эхом изменения напряжения на матрице 26 преобразователей. Далее, центральный блок 28 обработки модуля 16 управления может определять общие стратегии сканирования. Эти стратегии могут включать скорость сканирования объема, латеральную протяженность, глубину сканирования, максимальную и минимальную линейные плотности, время сканирования одной линии и линейную плотность.
Формирователь 30 луча получает ультразвуковые сигналы от матрицы 26 преобразователей и направляет их далее в качестве сигналов изображения.
Далее, ультразвуковая система 10 включает блок обработки сигнала 34, принимающий сигналы изображения. Блок 34 обработки сигнала, как правило, осуществляет аналого-цифровое преобразование, цифровую фильтрацию, например полосовую фильтрацию, а также детекцию и сжатие, например уменьшение динамического диапазона принимаемого ультразвукового эха или сигналов изображения. Блок обработки сигнала передает далее данные изображения.
Далее, ультразвуковая система 10 включает блок 36 обработки изображения, конвертирующий данные изображения, полученные от блока 34 обработки сигнала, в отображаемые данные, в итоге демонстрируемые на дисплее 18. В частности, блок обработки 36 изображения принимает данные изображения, проводит предварительную обработку данных изображения, а также может сохранять их в памяти изображения. Эти данные изображения затем подвергаются дальнейшей обработке, формируя удобное для просмотра пользователем изображение, подаваемое на дисплей 18. В данном случае, в частности, блок обработки 36 изображения может формировать трехмерные изображения из массива полученных двумерных изображений.
Общий блок интерфейса пользователя обозначен номером 38 и включает дисплей 18 и устройство 20 ввода. Он может также включать дополнительные устройства ввода, например, шаровой манипулятор, мышь или дополнительные кнопки на самом ультразвуковом датчике. Далее, центральный блок 28 обработки получает все данные, введенные пользователем посредством устройства 20 ввода, и управляет отображением данных пользователю через дисплей 18 и блок обработки 36 изображения. Таким образом, центральный блок 28 обработки может также управлять всем интерфейсом 38 пользователя.
Конкретный пример трехмерной ультразвуковой системы, в которой может применяться настоящее изобретение, представляет собой ультразвуковая система CX50 CompactXtreme, продаваемая заявителем изобретения, в частности, в комплекте с преобразователем X7-2t TEE, производимым заявителем, или другим преобразователем, применяющим технологию заявителя xMATRIX. Как правило, матричные системы преобразователей, используемые в системах Philips iE33, или технологии механических 3D/4D-преобразователей, используемых, например, в системах Philips iU22 и HD15, могут использовать настоящее изобретение.
На Фиг. 3 представлен пример объемной области 40 относительно ультразвукового датчика 14. Иллюстративный объем 40 представлен на данной фигуре в виде сектора, поскольку здесь матрица преобразователей ультразвукового датчика 14 представляет собой фазированную двумерную матрицу с электронным сканированием. Таким образом, размер объемной области 40 может быть выражен через угол 42 возвышения и боковой угол 44. Глубина 46 объемной области 40 может быть выражена через, так называемое время сканирования линии, в секундах на линию. Это время сканирования, затраченное на сканирование одной линии сканирования. В процессе получения изображения, двумерная матрица преобразователей ультразвукового датчика 14 управляется формирователем 30 луча таким образом, что объемная область 40 сканируется вдоль многих линий сканирования последовательно. Однако при многопоточной обработке приема единственный передаваемый луч порождает несколько линий сканирования сигнала приема, например четыре, вдоль которых сигнал принимается параллельно. В этом случае производится последовательное электронное сканирование подобных наборов линий приема по объемной области 40.
На Фиг. 4a и 4b показано схематическое представление снимков экрана 50 (изображения). На изображении 50 показана структура 52 внутри сканированной объемной области 40. Кроме того, показано, как производится измерение расстояния в плоскости согласно предшествующему уровню техники. На фигурах представлены типичные снимки трехмерных изображений 50 объемной области 40, которые могут быть получены при предшествующем уровне техники систем ультразвуковой визуализации.
На трехмерном изображении 50 структура 52 получена в результате обработки данных, собранных матрицей 26 преобразователей и прошедших через блок 34 обработки сигнала и блок обработки 36 изображения. Структура 52, например, может представлять собой любую часть анатомической области пациента, такой как сосуд, сердце, или, как показано на последующих фигурах, неровности волнистой искривленной поверхности.
Если пользователю требуется измерить расстояние при исследовании изображения 50 на Фиг. 4a, пользователь может выбрать первую точку 54 и вторую точку 56. Как понятно из Фиг. 4b, расстояние 58 между точками 54 и 56 равняется действительному расстоянию между двумя точками на структуре 52, которые пользователь отметил при анализе изображения 50 на Фиг. 4a. Таким образом, линейная траектория 60 измерения между первой точкой 54 и второй точкой 58 соответствует действительному расстоянию между двумя точками 54, 56, определяемому как расстояние 58, которое отображается пользователю.
Однако на Фиг. 5a и 5b представлен случай, когда две точки 54 и 56 не лежат в одной и той же плоскости просмотра, как можно видеть на изображении 50 на Фиг. 5a. Если пользователь отмечает две точки 54 и 56 на изображении 50 на Фиг. 5a, расстояние между точками 54, 56, определяемое системой 10 ультразвуковой визуализации, оказывается короче, чем действительное расстояние между двумя точками 54, 56 на структуре 52. Это означает, что пользователь отметил не те точки, которые действительно хотел отметить, анализируя изображение 50 на Фиг. 5a.
Это ясно видно из Фиг. 5b. На Фиг. 5b показана та же структура, что и на Фиг. 5a, однако развернутая на 90°. Плоскость 62 соответствует плоскости, отображаемой пользователю, смотрящему на изображение 50 на Фиг. 5a. Как видно из Фиг. 5b, первая точка 54 лежит в плоскости 62, поскольку соответствующая часть структуры 52 также лежит в плоскости 62. Однако, поскольку структура 52 имеет протяженность внутри объемной области 40, вторая точка 56, выбранная пользователем при просмотре изображения 50 на Фиг. 5a, не совпадает с действительной точкой 64 на структуре 52, которую пользователь хотел бы отметить при анализе изображения 50 на Фиг. 5a. Таким образом, поскольку измерено лишь расстояние вдоль траектории измерения 60 и в плоскости 62, расстояние между двумя точками 54 и 56 короче, чем действительное расстояние. Однако, это действительное расстояние, которое требуется измерить пользователю с помощью системы ультразвуковой визуализации 10. В этом заключается эффект “заваливания”.
На Фиг. 6a и 6b показаны измерения расстояния 58 между первой точкой 54 и второй точкой 56, лежащими в плоскости просмотра, согласно варианту осуществления. Пользователю показано изображение 50 объемной области 40 как представлено на Фиг. 6a. Изображение 50 лежит в плоскости 62. В пределах плоскости 62 можно определить первую координату 66 (например, по оси X) и вторую координату 68 (например, по оси Y) каждой из точек 54, 56. Например, это можно сделать, перемещая указатель 53 по изображению и, таким образом, по плоскости 62. Пользователь может перемещать указатель 53 по структуре 52 и определять точку на структуре 52, которая будет являться одним из концов отрезка 58, расстояние вдоль которого следует измерить. Таким образом, у пользователя есть возможность перемещать указатель в плоскости 62 и в пределах видимости, как показано на Фиг. 6а, пока не будет достигнуто, например, положение первой точки 54. Затем, пользователь может подтвердить позицию указателя 53, нажав соответствующую клавишу или другим способом. Теперь, без изменения поля видимости, показанного на Фиг. 6a, пользователь может управлять глубиной указателя 53, чтобы привести его в правильное положение вдоль третьей оси 70. Поскольку перемещение указателя 53 вдоль третьей оси 70 не отображается пользователю, наблюдающему изображение 50, как показано на Фиг. 6a, на дисплее и в изображении 50 присутствует визуальный индикатор 72 для информирования пользователя о том, что указатель 53 коснулся структуры 52. Использование восклицательного знака в качестве визуального индикатора 72 на Фиг. 6a используется исключительно для иллюстрации. Можно использовать любые символы и фразы, появляющиеся в тот момент, когда указатель действительно касается структуры 52. Альтернативно или дополнительно к этому, указатель 53, согласно механизму невидимых линий, может исчезать при проникновении в структуру 52. Кроме того, указатель и/или структура 52 могут подсвечиваться в случае совмещения указателя и структуры 52.
Перемещение указателя 53 в плоскости 62 называется “первичным перемещением”. Перемещение указателя 53 перпендикулярно плоскости 62 называется “вторичным перемещением”. В вышеприведенном описании первичное перемещение и вторичное перемещение производились последовательно, однако следует понимать, что это лишь один из возможных вариантов осуществления первичного и вторичного перемещения. Первичное и вторичное перемещения могут также производиться одновременно.
На Фиг. 7a и 7b показано, как управление глубиной указателя 53 позволяет избежать эффекта “заваливания”.
Во-первых, как показано на Фиг. 7a и 7b, указатель 53 может иметь любую подходящую форму. Он может иметь форму стрелки, креста или другую, для того чтобы правильно определять части структуры 52, которые, возможно, требуется выделить пользователю.
Как объяснено выше, пользователь может выделить в поле видимости на Фиг. 7a первую точку 54, перемещая указатель 53 в плоскости 62 для определения первой и второй координаты 66, 68, а затем осуществить вторичное перемещение указателя 53 вдоль третьей оси 70 в глубину объемной области 40 до касания структуры 52 указателем 53, на что указывает визуальный индикатор 72. Вторая точка 56 затем может быть выбрана таким же способом.
Как понятно из изображения, развернутого на 90° и показанного на Фиг. 7b, описанным способом расстояние 58 между двумя точками 54, 56, где вторая точка 56 не лежит в плоскости 62, определяется правильно. Первая точка 54 и вторая точка 56 могут быть заданы исходя из касания структуры 52. Кроме того, это можно сделать не разворачивая изображения, как показано на Фиг. 7a. После этого расстояние 58 между первой точкой 54 и второй точкой 56 может быть правильно определено.
Дополнительно или альтернативно к визуальной индикации 72, может осуществляться звуковая или тактильная индикация. Возвращаясь к Фиг. 1, можно видеть, что дисплей 18 или любая другая часть системы ультразвуковой визуализации 10 может снабжаться динамиком 73, способным производить шум или тоновый сигнал в том случае, если указатель 53 совпадает со структурой 52, запуская звуковой индикатор 74.
Далее, дополнительно или альтернативно визуальному или звуковому индикаторам 72, 74, может присутствовать тактильный индикатор 76, реализованный, например, путем встраивания вибрационного механизма 75 в устройство ввода 20. Таким образом, пользователь ощущает касание указателем структуры, используя устройство 20 ввода для перемещения указателя 53 по объемной области.
Далее, система ультразвуковой визуализации 10 может быть выполнена с возможностью измерения расстояния между первой точкой 54 и второй точкой 56 не только как кратчайшее расстояние вдоль прямой линии, соединяющей обе точки 54, 56, но также и вдоль любой другой траектории 78 измерения. Для определения этой альтернативной траектории 78 пользователь может указать дополнительные точки 79 в объемной области, осуществляя первичное перемещение и вторичное перемещение, как объяснено выше, или использовать стандартные геометрические формы, например эллипс, для соединения первой точки 54 и второй точки 56.
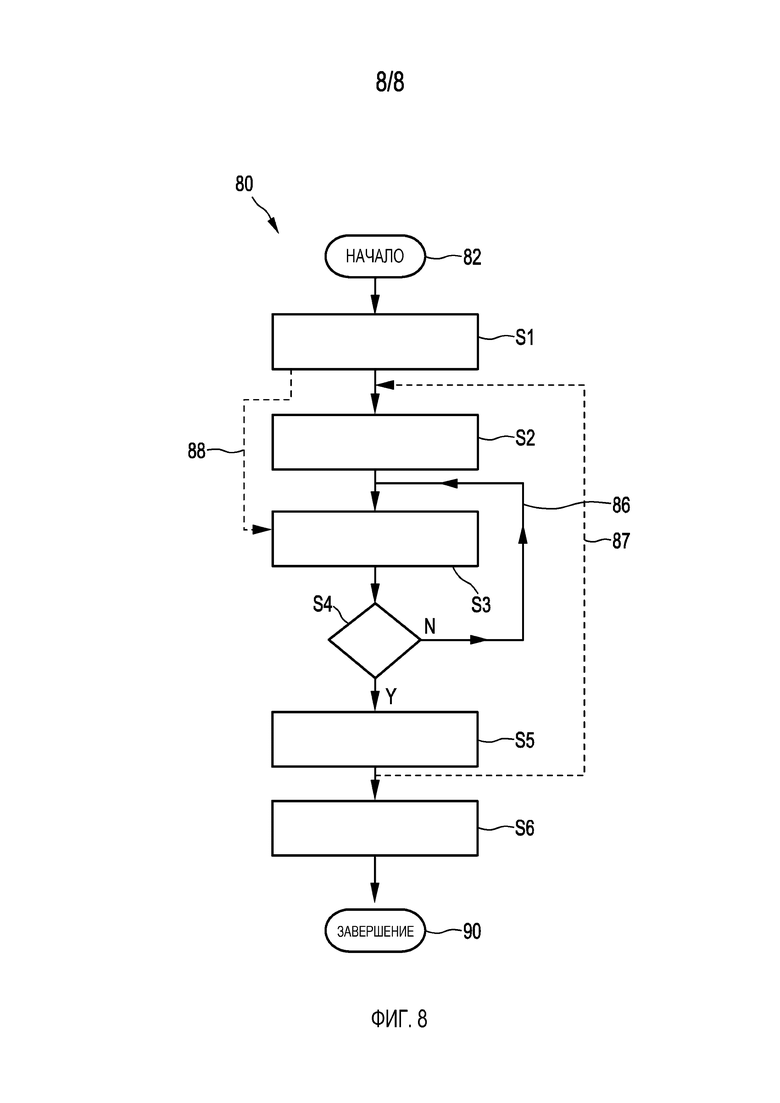
На Фиг. 8 показана блок-схема варианта осуществления способа 80. Выполнение способа начинается со стадии 82. На первой стадии S1 трехмерное ультразвуковое изображение 50 выводится на дисплей 18 вместе с указателем 53 для идентификации первой точки 54 и второй точки 56. Такое изображение может являться одним из изображений, подобным оказанным на Фиг. 6a и 7a.
Затем на стадии S2 пользователь перемещает указатель параллельно плоскости, выводимой на дисплей 18, согласно данным, введенным пользователем, для установления первой координаты 66 и второй координаты 68, по меньшей мере, одной из точек 54, 56, соответствующих первой и второй точке.
После определения первой координаты 66 и второй координаты 68, на стадии S3 пользователь перемещает указатель 53 перпендикулярно плоскости 62, выводимой на дисплей, согласно данным, введенным пользователем, для определения третьей координаты 70 соответствующей точки.
После завершения вторичного перемещения на стадии S3 на стадии S4 определяется, произошло ли совмещение указателя 53 со структурой 52. Если нет, на дисплее не происходит никаких изменений, и способ движется по циклу, на что указывает линия 86. Если да, включается индикация совмещения указателя 53 со структурой 52. Как указано выше, это может осуществляться с помощью визуальной индикации 72, звуковой индикации 74 или тактильной индикации 76. Соответствующая индикация осуществляется на стадии S5. Теперь, третья координата 70 может быть установлена. В случае, если на данный момент определена лишь одна точка, способ возвращается вновь к стадии S2, что обозначено стрелкой 87, для того, чтобы определить координаты соответствующей второй точки.
После того как обе точки определены, на стадии S6 определяется расстояние 58 между двумя точками 54 и 56. После этого способ заканчивается стадией 90.
Однако стадии S2 и S3 не обязательно должны осуществляться последовательно. Возможно также параллельное осуществление первичного перемещения в плоскости и вторичного перемещения перпендикулярно плоскости сразу после стадии S1, на что указывает стрелка 88, показанная пунктиром. В этом случае пользователь может перемещать указатель 53, чтобы одновременно определить все три координаты 66, 68, 70.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОЛУЧЕНИЕ УЛЬТРАЗВУКОВЫХ ИЗОБРАЖЕНИЙ С РАСШИРЕННЫМ ПОЛЕМ ЗРЕНИЯ С ПОМОЩЬЮ НАПРАВЛЯЕМОГО СКАНИРОВАНИЯ С EFOV | 2009 |
|
RU2519811C2 |
| ВИЗУАЛИЗАЦИЯ УЛЬТРАЗВУКОВЫХ ИЗОБРАЖЕНИЙ С РАСШИРЕННЫМ ПОЛЕМ ОБЗОРА С ПОМОЩЬЮ ДВУМЕРНОГО МАТРИЧНОГО ЗОНДА | 2009 |
|
RU2507535C2 |
| СОЗДАНИЕ СТАНДАРТИЗОВАННЫХ ПРОТОКОЛОВ ДЛЯ АНАЛИЗА ДАННЫХ ТРЕХМЕРНОЙ ЭХОГРАММЫ | 2009 |
|
RU2514112C2 |
| АВТОМАТИЧЕСКИЙ ВЫБОР ПЛОСКОСТИ ВИЗУАЛИЗАЦИИ ДЛЯ ЭХОКАРДИОГРАФИИ | 2012 |
|
RU2642929C2 |
| ОДНОВРЕМЕННОЕ УЛЬТРАЗВУКОВОЕ НАБЛЮДЕНИЕ ТРЕХМЕРНОГО ОБЪЕМА С МНОЖЕСТВА НАПРАВЛЕНИЙ | 2013 |
|
RU2634295C2 |
| АВТОМАТИЗИРОВАННАЯ ИДЕНТИФИКАЦИЯ ПОЛОЖЕНИЯ РЕГУРГИТАЦИОННОГО ОТВЕРСТИЯ МИТРАЛЬНОГО КЛАПАНА НА УЛЬТРАЗВУКОВОМ ИЗОБРАЖЕНИИ | 2011 |
|
RU2589627C2 |
| СПОСОБ ВОЗДЕЙСТВИЯ НА ВИРТУАЛЬНЫЕ ОБЪЕКТЫ | 2008 |
|
RU2451982C1 |
| УЛЬТРАЗВУКОВАЯ СИСТЕМА И СПОСОБ ДЛЯ ВИЗУАЛИЗАЦИИ ТКАНИ ГРУДИ | 2017 |
|
RU2748435C2 |
| НАВЕДЕНИЕ НА ЦЕЛЕВОЙ ВИД ПО ОБРАТНОЙ СВЯЗИ ПРИ ПОЛУЧЕНИИ УЛЬТРАЗВУКОВЫХ ДАННЫХ | 2014 |
|
RU2683720C2 |
| СИСТЕМА И СПОСОБ ЭЛАСТОГРАФИЧЕСКИХ ИЗМЕРЕНИЙ | 2014 |
|
RU2667617C2 |



Использование: для ультразвуковой визуализации. Сущность изобретения заключается в том, что во избежание известного эффекта “заваливания”, из-за которого расстояние, измеренное системой, меньше, чем действительное расстояние между двумя точками, пользователь имеет возможность контролировать глубину указателя, отображаемого на изображении на дисплее. Кроме того, предусмотрена индикация совмещения указателя со структурой в объемной области для того, чтобы сделать перемещение указателя из плоскости, показанной на дисплее, более удобным для пользователя. Технический результат: обеспечение возможности исключения появления эффекта “заваливания”. 3 н. и 11 з.п. ф-лы, 12 ил.
1. Система (10) ультразвуковой визуализации для получения трехмерного изображения (50) объемной области (40), отличающаяся тем, что содержит:
матрицу (26) измерительных преобразователей, выполненную с возможностью формирования ультразвукового сигнала приема,
модуль (16) управления, выполненный с возможностью принимать ультразвуковой сигнал приема и формировать отображаемые данные, представляющие собой трехмерное изображение, при этом модуль (16) управления дополнительно выполнен с возможностью определения расстояния (58) между первой точкой и второй точкой, идентифицированными на трехмерном изображении,
дисплей (18), выполненный с возможностью приема отображаемых данных и отображения трехмерного изображения (50) объемной области (40) и указателя (53) для идентифицирования первой точки (54) и второй точки (56), и
устройство (20) ввода, выполненное с возможностью формирования входных данных для модуля (16) управления, при этом входные данные включают перемещение указателя (53),
причем система (10) ультразвуковой визуализации выполнена с возможностью первичного перемещения указателя (53) в плоскости (62), показанной пользователю, наблюдающему трехмерное изображение (50), отображаемое на дисплее (18), и вторичного перемещения указателя (53) перпендикулярно плоскости (62), и
при этом система ультразвуковой визуализации дополнительно выполнена с возможностью обеспечения индикации (72, 74, 76) при совмещении указателя (53) со структурой (52) в пределах объемной области (40).
2. Система по п. 1, в которой система (10) ультразвуковой визуализации выполнена с возможностью осуществления вторичного перемещения указателя после завершения первичного перемещения.
3. Система по п. 1, в которой система (10) ультразвуковой визуализации выполнена с возможностью одновременного осуществления вторичного перемещения и первичного перемещения.
4. Система по п. 1, в которой индикация представляет собой визуальную индикацию (72), отображаемую на дисплее (18).
5. Система по п. 4, в которой визуальная индикация (72) представляет собой изменение внешнего вида указателя (53) или появление метки на дисплее (18).
6. Система по п. 5, в которой изменение внешнего вида указателя (53) вызывает подсветку указателя (53) или его исчезновение.
7. Система по п. 1, в которой визуальная индикация (72) представляет собой изменение внешнего вида структуры (52) внутри объемной области (40).
8. Система по п. 1, в которой система (10) ультразвуковой визуализации дополнительно содержит динамик (73), и при этом индикация (72, 74, 76) представляет собой звуковую индикацию (74), осуществляемую посредством динамика (73).
9. Система по п. 1, в которой индикация (72, 74, 76) представляет собой тактильную индикацию (76), осуществляемую посредством устройства (20) ввода.
10. Система по п. 1, в которой система (10) ультразвуковой визуализации дополнительно выполнена с возможностью задания траектории измерения (60) между первой точкой (54) и второй точкой (56), и при этом расстояние (58) определяется вдоль траектории (60) измерения.
11. Система по п. 10, в которой система ультразвуковой визуализации выполнена с возможностью ввода траектории измерения посредством идентификации по меньшей мере одной дополнительной точки (79) в объемной области (40) и/или выбором геометрической формы для соединения первой точки (54) и второй точки (56).
12. Система по п. 1, дополнительно содержащая:
формирователь (30) луча, выполненный с возможностью управлять сканированием объемной области (40) с помощью матрицы (26) измерительных преобразователей вдоль нескольких линий (59) сканирования, и дополнительно выполненный с возможностью приема ультразвукового сигнала приема и формирования сигнала изображения,
блок (34) обработки сигнала, выполненный с возможностью принимать сигнал изображения и формировать данные изображения,
блок (36) обработки изображения, выполненный с возможностью принимать данные изображения от блока (34) обработки сигнала и формировать отображаемые данные.
13. Способ (80) определения расстояния (58) между первой точкой (54) и второй точкой (56) в трехмерном ультразвуковом изображении (50) объемной области (40), отличающийся тем, что содержит этапы:
отображение (S1) трехмерного ультразвукового изображения на дисплее (18) вместе с указателем (53) для идентифицирования первой точки (54) и второй точки (56),
перемещение (S2) указателя (53) параллельно плоскости (62), показанной пользователю, наблюдающему трехмерное изображение (50), выводимое на дисплее, на основании входных данных для идентифицирования первой координаты (66) и второй координаты (68) по меньшей мере одной из первой и второй точек (56),
перемещение (S3) указателя (53) перпендикулярно плоскости (62), отображаемой на дисплее, на основании входных данных для идентифицирования третьей координаты (70) соответствующей точки,
обеспечение (S4) индикации в случае, если указатель (53) совмещается со структурой (52), отображаемой внутри объемной области (40), и
определение (S6) расстояния (58) между первой точкой (54) и второй точкой (56).
14. Носитель данных, на котором хранится компьютерная программа, содержащая средство программного кода, побуждающее компьютер выполнять этапы способа (80) по п. 13, если указанная программа запущена на компьютере.
| JPH 11299787A, 02.11.1999 | |||
| JP 2007054504A, 08.03.2007 | |||
| JP 2011215692A, 27.10.2011 | |||
| JPH 09308631A, 02.12.1997 | |||
| RU 2011109181A, 10.01.2011. |

