ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к сопоставлению ультразвуковых изображений для наведения пользователя, и более конкретно к такому сопоставлению с уже существующим изображением для достижения целевого вида.
УРОВЕНЬ ТЕХНИКИ
Успешное ультразвуковое сканирование в значительной мере основано на подготовке и опыте пользователя. Чтобы избежать артефактов, пользователь должен поместить зонд в правильное положение, т.е. найти хорошее акустическое окно для визуализации. Стандартно это выполняют только на основании ультразвуковых изображений, отображаемых на экране в режиме реального времени. Несмотря на то, что опытные пользователи обычно способны распознать ухудшение изображения и, соответственно, улучшить качество изображения посредством перемещения зонда в лучшее положение, менее опытные пользователи могут получать ухудшенные изображения по причине недостаточной зрительно-моторной координации и меньшей ознакомленности с артефактами. Получение набора стандартных видов интересующего органа организма представляет собой сложную задачу для работников здравоохранения, обладающих небольшим или нулевым опытом в радиологии.
В “Real-Time Scan Assistant for Echocardiography”, Snare, S. R. et al., IEEE Transactions in Ultrasonics, Ferroelectrics, and Frequency Control (2012) (далее в настоящем документе «публикация Snare») описан подход к обработке изображений, применяемый к двухмерным (2D) четырехкамерным изображениям сердца для вывода показателя качества получаемого вида.
Патентная публикация США № 2012/0065510 Snare S.R. и др. раскрывает сравнение изображения «в реальном времени» от зонда ультразвуковой визуализации с целевым изображением посредсвом корреляции изображений. Кроме того, в Snare раскрыт процессор, вычисляющий изменения, необходимые по сравнению с текущим положением зонда, для перемещения зонда в новое положение, которое приведет к получению дополнительных ультразвуковых данных, которые могут быть использованы для формирования изображения, которое более близко соответствует целевому изображению. Пользователю передаются инструкции о том, как следует перемещать зонд.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
То, что предложено в настоящем документе далее, направлено на один или более из вышеупомянутых вопросов.
В соответствии с одним из аспектов настоящего изобретения, наведение при получении ультразвуковой визуализации субъекта для достижения целевого вида, содержит излучение посредством визуализирующего зонда ультразвука к субъекту и прием в ответ текущего ультразвукового вида; и сопоставление принятого изображения с уже существующим изображением. При сопоставлении оценивают положение принятого вида в пространстве состояний, имеющем измерения, которые представляют собой атрибуты изображений. Пользовательский модуль выполнен с возможностью осуществления в ответ на упомянутое сопоставление доступа к базе данных, организованной в виде пространства состояний, относительно упомянутого положения. Упомянутый доступ направлен на получение пользовательской обратной связи для выдачи при наведении.
В одном из подаспектов целевой вид представляет собой вид органа организма или сосуда субъекта.
В другом подаспекте формирование осуществляют динамически или непрерывно.
В другом подаспекте зонд имеет текущее размещение и происходит по меньшей мере одно из демонстрации и инструктирования, как следует перемещать зонд из его текущего размещения таким образом, чтобы тем самым реализовать достижение целевого вида.
В одном из подаспектов обнаруживают совпадение между целевым видом и принятым видом.
В качестве дополнительного подаспекта, устройство автоматически и без необходимости вмешательства пользователя выполняет одно или оба из a) уведомления пользователя в ответ на обнаружение совпадения; и b) получения данных изображения посредством зонда в ответ на обнаружение совпадения.
В еще одном другом подаспекте целевой вид представляет собой стандартный анатомический вид, который до момента наведения уже задан авторитетной медицинской организацией.
В еще одном другом подаспекте представлена обратная связь.
В качестве дополнительного ее подаспекта представление осуществляют динамически или непрерывно.
В еще одном другом подаспекте принятый вид совмещают с трехмерным эталонным изображением.
В одном из подаспектов совмещение осуществляют динамически или непрерывно.
В еще одном другом подаспекте эталонное изображение включает в себя атлас, изображение субъекта, полученное посредством медицинской визуализации или как атлас, так и изображение.
В дополнительном подаспекте атлас включает в себя статистический атлас.
В качестве дополнительного подаспекта в отношении совмещения вида, изображение, извлеченное из эталонного изображения, и графическую индикацию плоскости целевого вида отображают параллельно.
В дополнительном или дополняющем подаспекте совмещения вида имеет место параллельное отображение одного или обоих из следующего: принятого вида, объединенного с изображением, извлеченным из эталонного изображения; и принятого вида и изображения, извлеченного из эталонного изображения, причем извлеченное изображение появляется параллельно и увеличенным, чтобы показать в пространстве, где принятый вид совмещается с эталонным изображением.
В другой вариации в качестве подаспекта совмещения вида, обеспечивают инструкцию о том, как следует перемещать зонд для достижения целевого вида. Громкоговоритель для инструктирования выдает слышимые голосовые инструкции, инструкции выдаются на дисплей, или для этих целей предусмотрены и громкоговоритель, и дисплей.
В конкретной версии упомянутого выше аспекта местоположение принятого вида оценивают в пространстве состояний.
В конкретной подверсии этого, допплеровские настройки, автоматически по умолчанию, инициализируют в соответствии с теми, которые были предварительно заданы для целевого вида при построении базы данных.
В качестве подверсии этого, на основании текущего ультразвукового вида, выполняют выбор соответствующей траектории в пространстве состояний в направлении целевого вида.
В качестве дополнительной подверсии, обратная связь основана на выбор.
В одной добавочной подверсии выполняют выбор оптимальной траектории в пространстве состояний в направлении целевого вида.
В конкретной подверсии сканер, выполненный с возможностью формирования пространства состояний, выполняет это с помощью этапов, которые содержат: получение посредством сканера и от множества визуализируемых субъектов изображений, специализированных для конкретного органа организма или сосуда таким образом, что орган или сосуд и/или окружающая ткань изображены на всех из множества изображений; и маркирование изображений с использованием соответствующих атрибутов.
В дополнительной подверсии формирование пространства состояний содержит создание связей конкретных изображений, таких как те, которые отличны от целевых, т. е. стандартных, изображений, с соответствующими инструкциями о том, как направлять зонд от конкретнного изображения к одному другому из изображений.
В другом аспекте устройство выполнено с возможностью наведения при получении ультразвуковой визуализации субъекта для достижения целевого вида. Устройство включает в себя: визуализирующий зонд (144) для излучения ультразвука в субъекта и для приема в ответ текущего ультразвукового вида; модуль (108) сопоставления изображений, выполненный с возможностью сопоставления принятого вида с уже существующим изображением; и модуль помощи пользователю, выполненный с возможностью формирования на основании упомянутого сопоставления обратной связи для упомянутого наведения. Модуль сопоставления изображений выполнен с возможностью совмещения посредством сопоставления паттернов, основанных на изображениях, принятого вида с эталонным изображением (S240), содержащим статистический атлас, который включает в себя распределение интенсивностей изображения, отражающее индивидуальные элементы популяции, для каждого вокселя. Для каждого вокселя включена информация об окружении.
Подробности новой технологии интерактивного визуального наведения в реальном времени дополнительно изложены далее, с помощью нижеследующих чертежей, которые выполнены не в масштабе.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На фиг. 1 представлено схематическое изображение ультразвукового устройства интерактивного наведения клинициста в соответствии с настоящим изобретением;
на фиг. 2 представлена общая блок-схема работы одной реализации устройства с фиг. 1 в соответствии с настоящим изобретением;
на фиг. 3 представлена блок-схема примера подготовки к сопоставлению изображений, в соответствии с настоящим изобретением;
на фиг. 4 представлена блок-схема подготовки пространства состояний, в соответствии с настоящим изобретением; и
на фиг. 5 представлена принципиальная схема и диаграмма экранного дисплея для примеров обратной связи пользователя, в соответствии с настоящим изобретением; и
на фиг. 6 представлена принципиальная иллюстрация примеров обратной связи пользователя и формирования обратной связи, в соответствии с настоящим изобретением.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
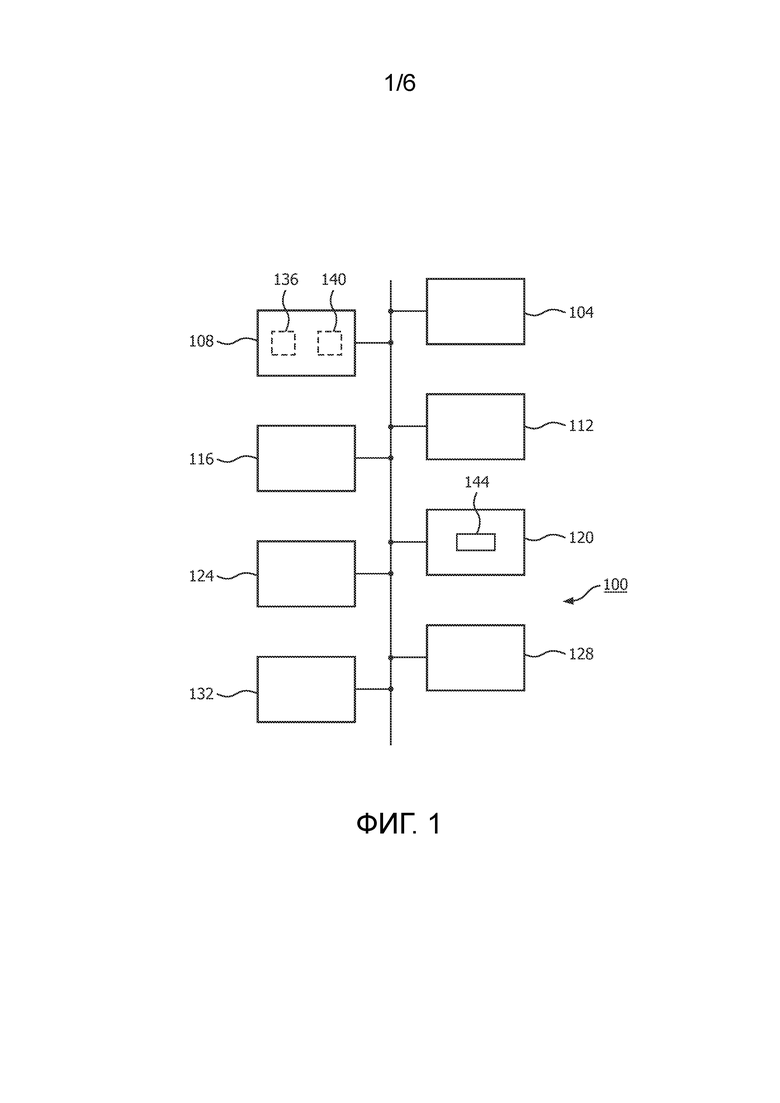
На фиг. 1 изображен, в качестве иллюстративного и неограничивающего примера, ультразвуковое устройство 100 интерактивного наведения клинициста. Устройство 100 содержит, среди других составляющих устройств, контроллер 104, модуль 108 сопоставления изображений, модуль 112 помощи пользователю, память 116, сканер 120, дисплей 124, громкоговоритель 128 и пользовательские средства 132 управления. Модуль 108 сопоставления изображений содержит модуль 136 совмещения изображений и/или модуль 140 обработки пространства состояний. Сканер содержит, среди других составляющих устройств, визуализирующий зонд 144.
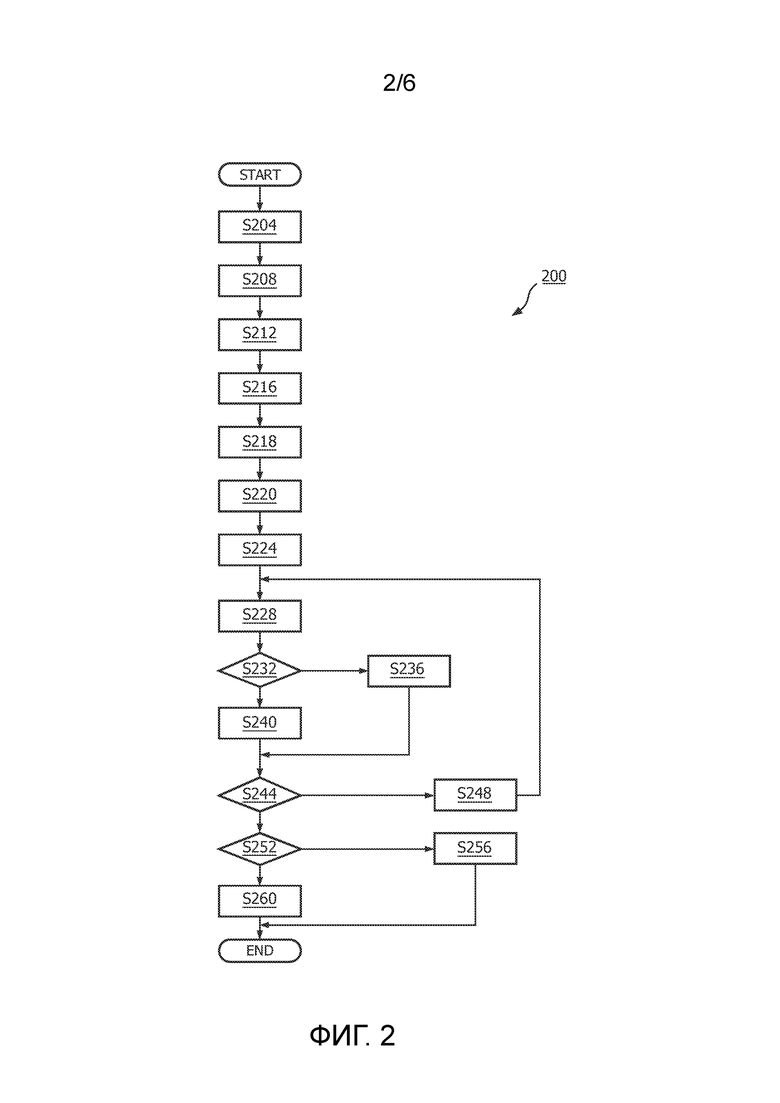
С точки зрения функционирования, общая процедура 200 для ультразвукового интерактивного наведения клинициста представляет собой следующее, как показано на фиг. 2. В качестве предварительного этапа, авторитетная медицинская организация, например, врач, медицинская комиссия, организация по медицинским стандартам или больница, задает стандартные ультразвуковые виды для интересующего органа или сосуда организма (этап S204). Набор стандартных видов точно определяют для использования в устройстве 100 (этап S208). Подготавливают один или более эталонов сопоставления изображений (этап S212), что объяснено более подробно далее со ссылкой на фиг. 3. Клиницист выбирает тип сканирования, которое может быть для конкретного органа организма, такого как сердце или сосуд, такой как конкретная артерия (этап S216). Устройство 100 получает соответствующий эталон сопоставления изображений (этап S218). Устройство 100 определяет, какой целевой вид из числа стандартных видов подлежит получению следующим. Устройство 100 также затем загружает допплеровские настройки, которые предварительно выбраны для целевого вида, как рассмотрено ниже применительно к фиг. 4. Вкратце, допплеровские настройки инициализируют автоматически по умолчанию в соответствии с теми, что были предварительно заданы для целевого вида при построении базы данных, организованной в качестве пространства состояний (этап S220). Устройство 100 показывает пользователю, как, на основании учебного руководства, например, помещать визуализирующий зонд 144 на поверхностные анатомические структуры визуализируемого субъекта, такого как пациент-животное или человек (этап S224). Пользователь, т. е. клиницист, помещает зонд 144 (этап S228). Если устройство 100 с функцией наведения пользователя работает на основании пространства состояний (этап S232), исполняют модуль 140 обработки пространства состояний, и он осуществляет оценку местоположения, в пространстве состояний, текущего вида или вида «в реальном времени», получаемого посредством зонда 144 (этап S236). С другой стороны, если модуль 140 обработки пространства состояний не исполняют (этап S232), но исполняют модуль 136 совмещения изображений, текущий вид совмещают с соответствующим положением и ориентацией на трехмерном эталонном изображении (этап S240). Если затем определяют, что текущий вид не совпадает с целевым видом или не достаточно представляет его (этап S244), устройство 100 дает обратную связь пользователя, которая инструктирует или показывает, как приблизиться к задаче достижения целевого вида (этап S248), и обработка переходит обратно к этапу S228 расположения пользователя. Более подробное описание обратной связи приведено далее в описании, сопровождающем фиг. 5 и 6. Если, наоборот, достигнуто совпадение (этап S244) и следует выполнять автоматическое получение (этап S252), например, врач регистрирует текущий вид для дальнейшего анализа (этап S256). С другой стороны, если достигнуто совпадение (этап S244) и следует выполнять инициируемое пользователем получение (этап S252), зеленый свет загорается на зонде 144 или в другом месте на сканере, например, на консоли, которая вмещает пользовательские средства 132 управления (этап S260).
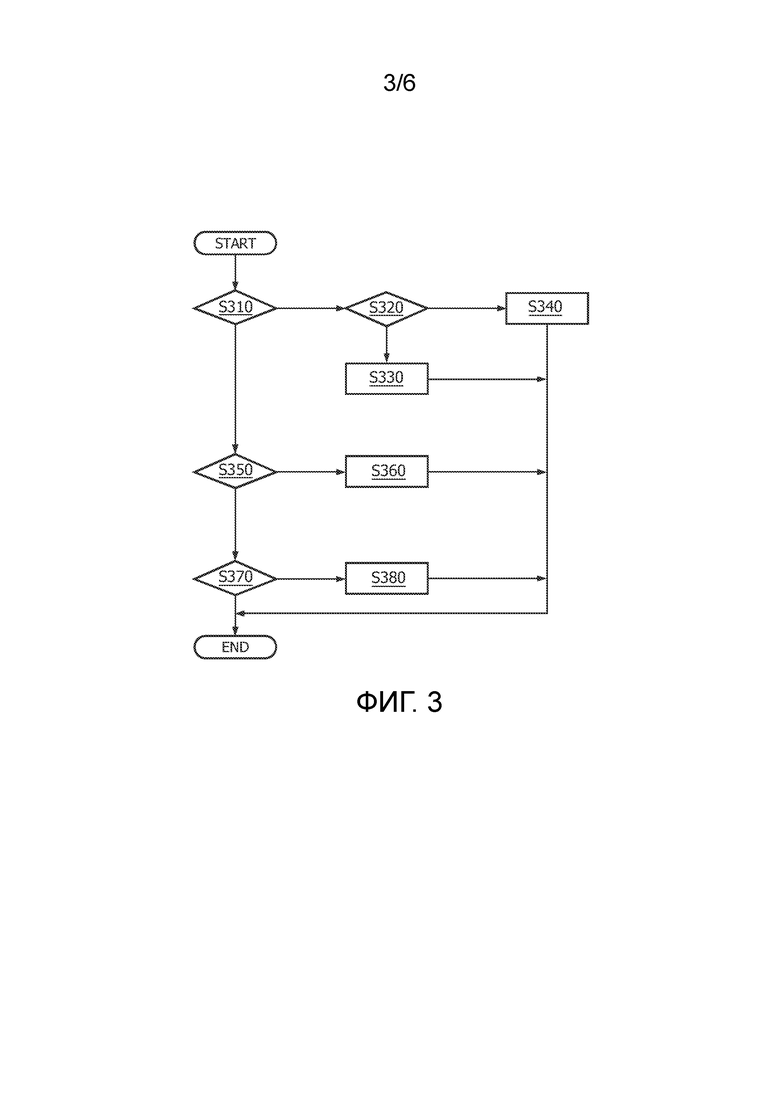
Этап подготовки эталона сопоставления изображений (S212) описан более подробно в блок-схеме на фиг. 3. Со ссылкой на фиг. 3, если сопоставление изображений должно быть основано на трехмерном анатомическом атласе в качестве эталона сопоставления изображений (этап S310), и атлас должен представлять собой статистический атлас (этап S320), получают статистический атлас (этап S330). Статистический атлас строят на основании сканирований компьютерной томографии (CT) и/или магнитно-резонансной визуализации (MR) для широкого спектра субъектов, чтобы охватить анатомические вариации. Его можно хранить на жестком диске, который является частью памяти 116. Для каждого вокселя атлас содержит распределение интенсивностей изображения, отражающее индивидуальные элементы популяции. Информация об окружении также включена для каждого вокселя. Сопоставление изображений для достижения совмещения осуществляют быстрее из-за статистических свойств статистического атласа. С другой стороны, если сопоставление изображений должно быть основано на анатомическом атласе, который не является статистическим атласом (этапы S310, S320), анатомический атлас получают в качестве трехмерного эталона сопоставления изображений, типично с помощью сканирований CT и/или MR для широкого спектра субъектов (этап S340). Если вместо атласа (этап S310) следует использовать сканирования CT и/или MR того же пациента, чтобы построить трехмерный эталон сопоставления изображений (этап S350), получают эталон «того же пациента» (этап S360). С другой стороны, если сканирования CT/MR того же пациента не доступны или иным образом не подлежат использованию (этап S350), а использованию подлежит пространство состояний (этап S370), получают пространство состояний (этап S380). Подготовка пространства состояний описана более подробно непосредственно ниже применительно к фиг. 4.
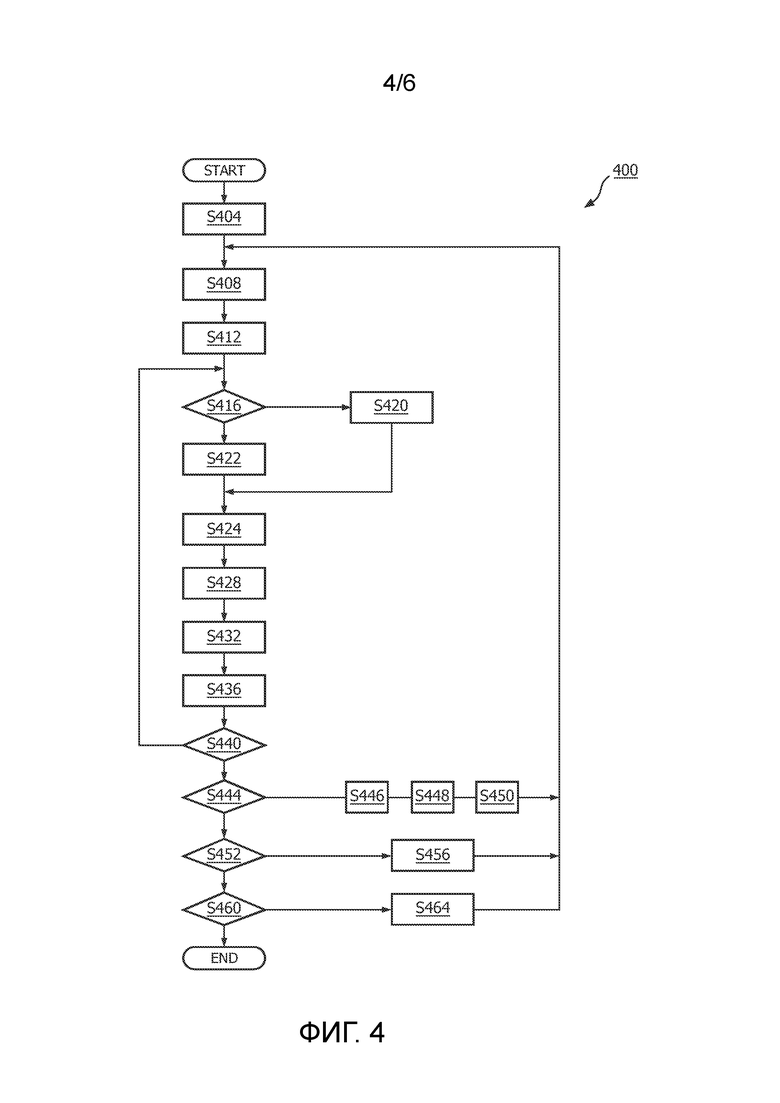
Процесс 400 подготовки пространства состояний содержит построение статистической базы данных для набора из сотен сканирований органа или сосуда, представляющего интерес, и вокруг него для множества визуализируемых субъектов. Базу данных организуют в виде пространства состояний. Изображения, подлежащие включению в пространство состояний, маркируют атрибутами, такими как наблюдаемые анатомические структуры на изображении, качество изображения и соответствующее положение и ориентация зонда на поверхностной анатомической структуре. Поднабор из этого набора изображений представляет собой набор целевых состояний, соответствующих стандартным ультразвуковым видам, с хорошим качеством изображения. Изображения базы данных можно описывать как точки в пространстве состояний, измерения которого представляют собой атрибуты изображений. В пространстве состояний возможно определять пространственные зависимости между ультразвуковыми изображениями и, в частности, траекторию между каким-либо ультразвуковым изображением и каким-либо из целевых изображений.
Изображения, подлежащие получению для включения в пространство состояний, являются специализированными для конкретного органа организма или сосуда так, что орган или сосуд и/или окружающую ткань изображают на каждом изображении. Процесс 400 инициализируют для первого визуализируемого субъекта, первого целевого вида, первой траектории и первого изображения (этап S404). Таким образом, обнуляют соответствующие указатели или счетчики. Текущее изображение получают посредством визуализирующего зонда 144 (этап S408). Регистрируют атрибуты изображения и текущее изображение маркируют с использованием этих атрибутов (этап S412). получение можно осуществлять частично автоматически и частично посредством ввода человеком, строящим базу данных. Текущее изображение можно маркировать в соответствии с: просматриваемой анатомической структурой (например, сонная артерия (левая, правая, общая, внутренняя, внешняя, луковица, бифуркация, проксимальная, медиальная, дистальная, продольная, поперечная, косая и т. д.), например, яремная вена, щитовидная железа, тела позвонков, позвоночная артерия, позвоночная вена, подключичная артерия и т. д.; положением и ориентацией зонда 144 относительно поверхностной анатомической структуры, чтобы получать эти изображения (например, переднее, переднее, заднее, краниальное, каудальное, латеральное, медиальное, шея, ключица, нижняя челюсть, кадык, горизонтальное, вертикальное, косое); при необходимости текущим режимом визуализации и настройками (например, B-режим, мощность, глубина фокусировки, гармоники, пространственный компаундинг; для цветного картирования потока, усиление, максимальная скорость, ориентация палитры, размер объема выборки; и для спектральной допплерографии, максимальная скорость и допплеровский угол); и при необходимости присутствием артефактов и меры качества изображения (например, артефакты контакта, хороший ультразвуковой контакт и средний контраст изображения). Маркирование текущего режима визуализации и настроек выполняют автоматически. Поскольку наведение в направлении целевого вида, как правило, происходит от изображения в B-режиме к изображению в B-режиме, такие режимы, как допплер, как правило, по существу, могут быть удалены из процесса наведения. Например, эти настройки можно подавать по умолчанию автоматически вначале, как выше на этапе S220. Значения настроек созданы в соответствии с управляющими корректировками, выполненными создателем базы данных, в частности, для целевого вида, во время построения базы данных. Если, в ходе наведения пользователя, пользователь непреднамеренно или по каким-либо причинам меняет эти настройки, получаемое расстояние в пространстве состояний будет автоматически в некотором моменте времени или точках времени, во время наведения, вести к обратной связи, предлагающей пользовательскую инструкцию для эффективного восстановления этих настроек. В качестве альтернативы, допплеровские настройки целевого вида не должны подаваться по умолчанию при инициализации; вместо этого обратная связь от пользователя из-за получаемого расстояния в пространстве состояний будет в ходе наведения пользователя или изначально инструктировать о подходящих корректировках в настройках.
Текущее получаемое изображение может быть получено посредством ультразвукового контакта, который является менее чем хорошим. Это должно быть выполнено преднамеренно с тем, чтобы сопоставление с этим изображением, когда оно находится в базе данных, позволяло обнаруживать недостаточный контакт. Если контакт недостаточен (этап S416), человек, создающий базу данных, наносит или повторно наносит связующую акустическую среду, такую как гель, восстанавливает зонд 144 в том же положении и ориентации относительно визуализируемого субъекта для улучшенного изображения (этап S420). В ином случае, если контакт не был недостаточным (этап S416), создатель базы данных, посредством движения зонда или корректировки настроек визуализации подготавливается к получению следующего изображения (этап S422). Движение или коректировку выполняют с тем, чтобы перемещаться в направлении целевого изображения.
В любом случае, т. е. Независимо от того, был контакт достаточным или нет, затем обработка направлена на это следующее изображение (этап S424). Получают изображение (этап S428). Атрибуты регистрируют частично вручную и частично автоматически (этап S432). Самое последнее движение зонда, корректировка контакта или корректировка настроек визуализации, как правило, для B-режима, выполненные на соответствующих вышеприведенных этапах S420, S422, вводятся или выбираются создателем базы данных или автоматически и связываются с предыдущим изображением, т. е. изображением, полученным прямо перед этапом S428 (этап S436). Ввод может представлять собой, относительно положения зонда, «влево», «вправо», «вверх» или «вниз». Здесь «вверх» в целом имеет значение относительно направления от головы к ногам. Взамен или вдобавок, ввод может представлять собой, относительно ориентации, т. е., наклона, «влево», «враво», «вверх» или «вниз». Дополнительно или взамен ввод может представлять собой, относительно места вращения зонда 144, «по часовой стрелке» или «против часовой стрелки». В каждой из этих опций расстояние или величину регистрировать не нужно, поскольку обновление контура обратной связи на этапах S228 - S248 происходит в реальном времени. В частности, изображение базы данных, имеющее ближайшее местоположение, в соответствии с евклидовым расстоянием, например, до оценки, сделанной на этапе S236, динамически удерживает пользователя на траектории в направлении целевого вида. Даже если во время работы пользователь отклоняется к другой траектории, эта другая траектория будет схожим образом наводить в направлении целевого вида. Что касается контакта зонда, ввод или выбор создателя базы данных может представлять собой «повторно нанести гель на зонд и вернуться в то же положение и ориентацию». Для изменения настроек визуализации автоматический выбор может представлять собой, например, «увеличить глубину визуализации».
Если текущий вид не является целевым видом (этап S440), обработка возвращается к этапу S416. В ином случае, если текущий вид представляет собой целевой вид, о чем свидетельствует приведение в действие подходящего пользовательского средства 132 управления создателем базы данных (этап S440), и другая траектория подлежит регистрации для текущего целевого вида текущего визуализируемого субъекта (этап S444), создателю базы данных предлагают посредством сообщения на экране ввести настройки допплеровского режима (этап S446). Интерактивно, в соответствии с серией экранных подсказок и выполнением ответных действий создателем базы данных, допплеровские настройки сохраняют в качестве атрибутов целевого вида (этап S448). Выполняют приращение указателя траектории (этап S450) и возвращаются к этапу S408. С другой стороны, если такая дополнительная траектория не подлежит регистрации (этап S444), но другой целевой вид для текущего визуализируемого субъекта подлежит использованию при построении базы данных (этап S452), выполняют приращение указателя вида (этап S456) и аналогичным образом выполняют возврат к этапу S408. Однако если не остается целевого вида для текущего визуализируемого субъекта в отношении построения базы данных (этап S452), но следующий визуализируемый субъект подлежит использованию при построении базы данных (этап S460), выполняют приращение указателя субъекта (этап S464) и аналогичным образом выполняют возврат к этапу S408.
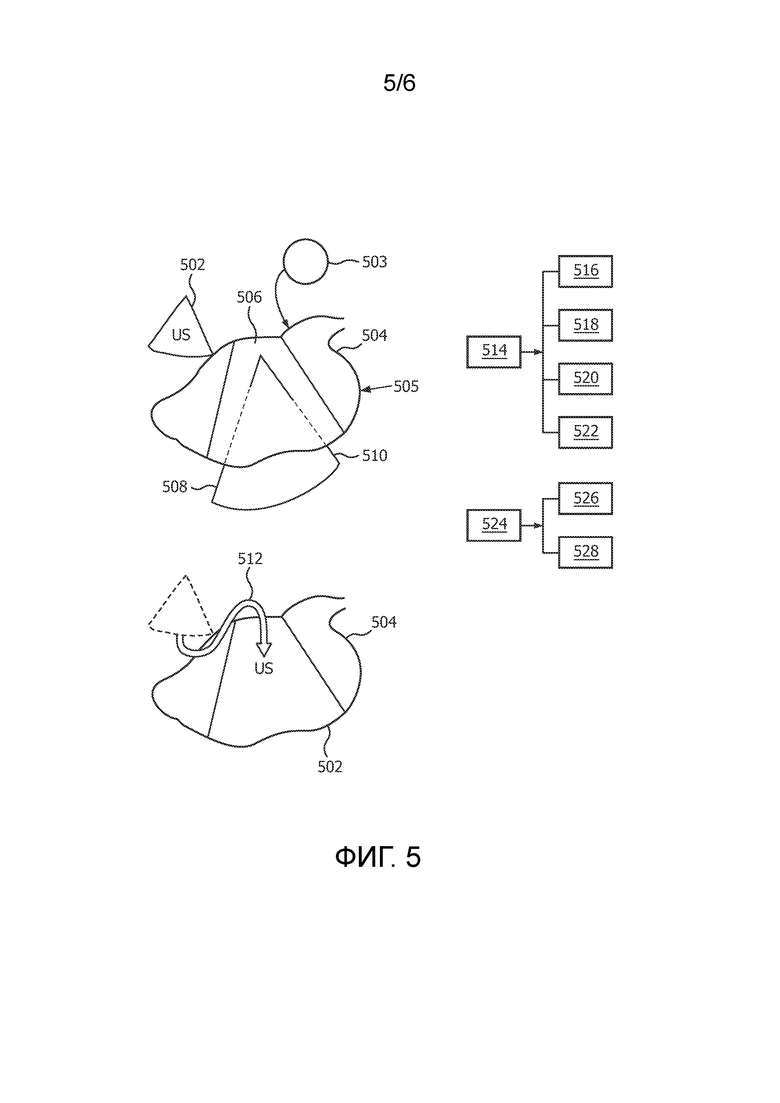
На фиг. 5 представлены примеры обратной связи пользователя на этапе S248, которые принимают форму экранных иллюстраций или сообщений или слышимой речи.
Ультразвуковое изображение, репрезентативное для текущего вида 502, такое как изображение в B-режиме, можно отображать наряду с изображением 504 в разрезе, извлеченным из трехмерного эталонного изображения 503, хранимого на жестком диске, т. е., из атласа или из трехмерного изображения, сконструированного из специфичных для пациента сканирований CT и/или MR. Изображение 504 в разрезе, здесь для органа 505 организма, т. е. сердца, разделено на части и увеличено для того, чтобы в пространстве показать, где принятый вид (или вид «в реальном времени») совмещается с эталонным изображением. Таким образом увеличенная область 506, которая окрашена, например, пространственно соответствует тому, где текущее изображение можно врезать в атлас. Чтобы показать клиницисту, как продолжать продвигаться в направлении текущего целевого вида, графическую индикацию 508 плоскости текущего целевого вида 510 можно добавлять в экранное представление. Также, вместо демонстрации текущего вида 502 в виде отдельного изображения, ультразвуковое изображение можно объединять 512 с изображением 504 в разрезе например, посредством попиксельной замены. Здесь также можно добавлять графическую индикацию 508.
В качестве альтернативы или дополнения, клинициста могут направлять экранные сообщения или слышимые голосовые инструкции. Таким образом, для положения/наклона 514 зонда 144 четыре возможные индикации 516-522 представляют собой «вправо», «влево», «вверх» и «вниз», так же как в варианте осуществления на основе пространства состояний. Аналогичным образом, как в варианте осуществления на основе пространства состояний, вращение 524 на месте может происходить «по часовой стрелке» 526 или «против часовой стрелки» 528.
Совмещение на этапе S240 содержит сопоставление паттернов, основанных на изображениях, для текущего вида 502 и трехмерного эталонного изображения и преобразование координат на текущем виде, чтобы привести его к совмещению с трехмерным изображением в соответствии с сопоставлением. Инструкции обратной связи, на основании преобразования, могут быть репрезентативными для одного типа или больше чем одного типа предлагаемых движений 514, 524 зонда.
Для варианта осуществления на основе пространства состояний, оценку на этапе S236 выполняют в результате распознавания паттерна при сравнениях между текущим видом 502 и изображениями базы данных, полученными на этапах S408, S428 регистрации. Представляют один или более типов инструкций обратной связи (т. е. движение зонда, контакт зонда и настройки визуализации), связанных с текущим изображением базы данных.
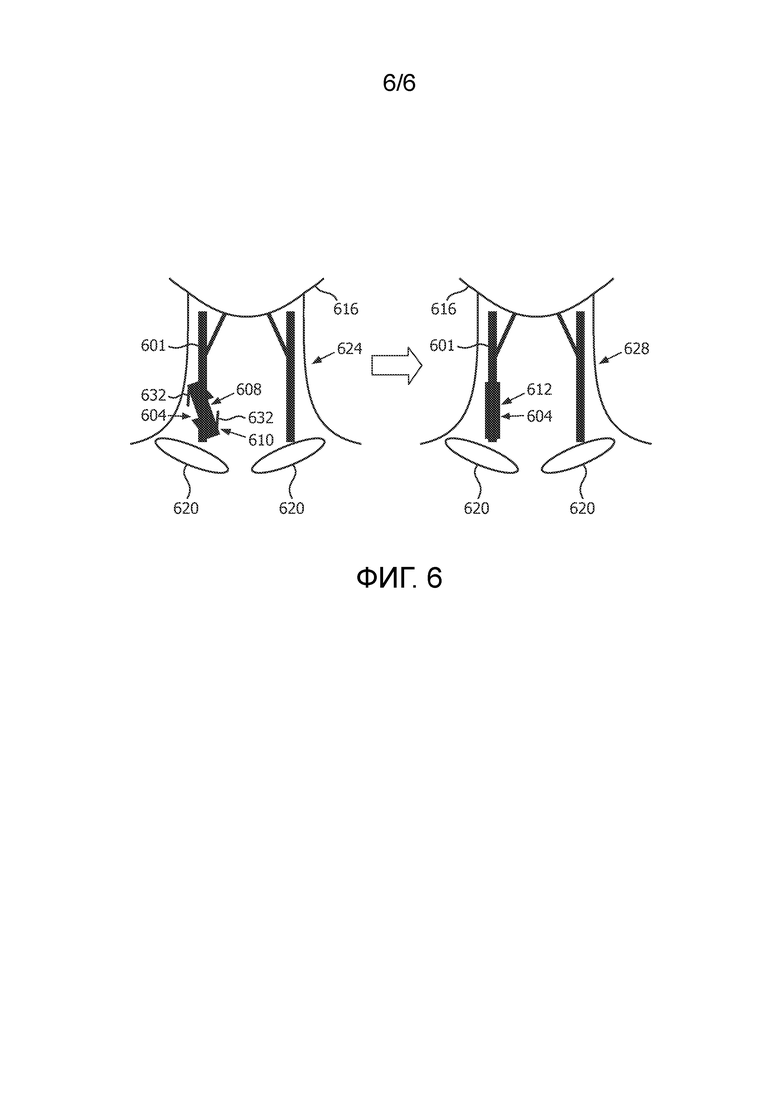
На фиг. 6 представлен конкретный пример обратной связи пользователя и формирования обратной связи. Этот пример относится к левой медиальной общей сонной артерии 601 и получению стандартного вида артерии. Графическое представление 604 поверхности массива преобразователей показано в косом положении 608, репрезентативном для текущего размещения 610 зонда 144, и в не косом положении 612. Массив преобразователей может представлять собой линейный массив или прямоугольный массив. Графическое представление 616 нижней челюсти и графическое представление 620 ключицы также приведены на фиг. 6. Текущее графическое представление 624 принципиально соответствует текущему виду 502, и целевое графическое представление 628 принципиально соответствует целевому виду 510. Кроме того, оба графических представления 624, 628 можно отображать на экране в дополнение к или вместо какого-либо другого графического представления или ультразвукового изображения, репрезентативного для текущего вида 502.
В варианте осуществления с пространством состояний, маркировка просматриваемой анатомической структуры для сопоставляемого изображения базы данных представляет собой «левая медиальная общая сонная артерия, косой вид». Маркировка положения зонда представляет собой «посередине между ключицей и нижней челюстью». Графические представления 616, 620 ключицы и нижней челюсти представляют окружающую ткань. Маркировка ориентации зонда представляет собой «косая». Маркировка режима визуализации представляет собой «B-режим». Маркировка настроек визуализации представляет собой «пространственный компаундинг». Маркировка артефактов представляет собой «без артефактов». Маркировка качества изображения представляет собой «хороший контраст изображения», на основании, например, средней интенсивности пикселей. Все маркировки можно отображать на дисплее 124 при сопоставлении с изображением 604 базы данных.
Если атрибут качества изображения сопоставляемого изображения базы данных показывал недостаток хорошего контакта зонда, вместо фактической индикации здесь «хороший» контакт зонда за счет хорошего качества изображения, это текущее состояние визуализации может мешать дополнительному сопоставлению с изображениями базы данных при направлении по траектории к стандартному виду. Соответственно, улучшение контакта будет преобладать над другими факторами наведения. Тогда это составляет пример выбора оптимальной траектории в пространстве состояний и подтверждается выдачей сообщения обратной связи пользователя, такого как «повторно нанести гель и восстановить зонд в том же местоположении и ориентации», которое связно с текущим изображением базы данных на этапе S436 связывания.
Однако поскольку маркировка качества изображения указывает на то, что контакт является хорошим, другую инструкцию, которую сохранили во время построения базы данных на этапе S436, посылают для просмотра на дисплее 124. Инструкция здесь представляет собой инструкцию 526 «вращать на месте по часовой стрелке». Это показано с помощью иллюстративных стрелок 632. Мониторинг получаемого движения зонда 144 клиницистом, как отмечено выше в настоящем документе, осуществляют в реальном времени посредством контура обратной связи на этапах с S228 до S248. Инструкцию посылают для отображения повторно, но она изменится в случае сопоставления текущего вида 502 с новым изображением базы данных, таким как то, которое соответствует целевому виду 510.
В случае варианта осуществления с трехмерным изображением, инструкция 526 «вращать по часовой стрелке» является выводимой почти по определению, поскольку только преобразование, используемое при совмещении текущего вида 502 с трехмерным эталонным изображением фактически представляет собой вращение по часовой стрелке. В менее очевидном случае, где достижение целевого вида 510 влечет, например, вращение зонда на месте и поступательное движение, решение о том, преобладает ли вращение или поступательное движение, принимает устройство 100. Критерии могут содержать пороговые величины, выбранные на основании эмпирического опыта, несмотря на то, что, например, местоположение, как правило, преобладает над наклоном до тех пор, пока местоположение зонда не будет близко к тому, которое необходимо для целевого вида 510.
Наведение при получении ультразвуковой визуализации субъекта для достижения целевого вида, такого как стандартный вид, влечет излучение ультразвука в субъекта и прием в ответ текущего ультразвукового вида; сопоставление принятого изображения с уже существующим изображением, таким как трехмерное эталонное изображение; и, для помощи пользователю, формирование на основании сопоставления обратной связи для наведения. Эталонное изображение может представлять собой статистический атлас, или его можно извлекать из специфичных для пациента сканирований CT или MR. Вместо этого, уже существующее изображение может представлять собой изображение базы данных, соответствующее состоянию в пространстве состояний. Обратная связь может представлять собой изображение, извлеченное из эталонного изображения; графическую индикацию плоскости целевого вида; принятый вид, объединенный с изображением, извлеченным из эталонного изображения; или принятый вид и изображение, извлеченное из упомянутого эталонного изображения, извлеченное изображение появляется параллельно и с увеличением, чтобы показать в пространстве, где принятый вид совмещается с эталонным изображением. Целевой вид может представлять собой вид органа организма или сосуда субъекта. И атлас и база данных могут быть специализированными для отображения выбранного органа или сосуда пользователя и их окружающей ткани.
В дополнение к выполнению диагностического исследования сердца, которое могут выполнять медицинские сестры или другие клиницисты, которые могут не иметь подготовки, в частности, в сонографии, устройство 100 интерактивного визуального наведения может направлять начинающих сонографистов. В качестве альтернативы, новая визуальная обратная связь устройства 100 может ускорять рабочий процесс у подготовленных или опытных сонографистов.
Хотя изобретение проиллюстрировано и описано подробно на чертежах и в приведенном выше описании, такие иллюстрации и описание следует рассматривать как иллюстративные или примерные и не ограничивающие; изобретение не ограничено раскрытыми вариантами осуществления.
Например, зонд 144 может в качестве альтернативы или дополнения использовать тактильную обратную связь для подходящего движения зонда в направлении стандартного вида.
Другие вариации в раскрытых вариантах осуществления могут быть понятны специалистам в данной области техники и реализованы ими при практическом осуществлении описываемого в заявке изобретения при изучении чертежей, описания и приложенной формулы изобретения. В формуле изобретения слово «содержит» не исключает другие элементы или этапы, а форма единственного числа не исключает множественное число. Любые ссылочные позиции в формуле изобретения не следует толковать в качестве ограничения объема.
Компьютерную программу можно хранить мгновенно, временно или в течение более длительного периода времени на подходящем машиночитаемом носителе, таком как оптический запоминающий носитель или твердотельный носитель. Такой носитель является постоянным только в том смысле, что не является временным, распространяющимся сигналом, но включает в себя другие формы машиночитаемых носителей, таких как регистровая память, кэш процессора, RAM и другая энергозависимая память.
Один процессор или другой блок может выполнять функции нескольких элементов, перечисленных в формуле изобретения. Сам факт того, что определенные средства перечислены в различных зависимых пунктах формулы изобретения, не указывает на то, что сочетание этих средств не может быть использовано с пользой.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКИЙ ВЫБОР ПЛОСКОСТИ ВИЗУАЛИЗАЦИИ ДЛЯ ЭХОКАРДИОГРАФИИ | 2012 |
|
RU2642929C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ОТСЛЕЖИВАНИЯ ПРОНИКАЮЩЕГО ИНСТРУМЕНТА | 2014 |
|
RU2688316C1 |
| БЛОК УПРАВЛЕНИЯ УЛЬТРАЗВУКОВЫМИ ИССЛЕДОВАНИЯМИ | 2019 |
|
RU2800255C2 |
| МАГНИТНО-РЕЗОНАНСНАЯ ВИЗУАЛИЗАЦИЯ ВДОЛЬ ОСИ УСТРОЙСТВА ДОСТАВКИ ЭНЕРГИИ | 2013 |
|
RU2653791C2 |
| СХЕМЫ ВОЗБУЖДЕНИЯ ДЛЯ НЕДОРОГИХ МАССИВОВ ПРЕОБРАЗОВАТЕЛЕЙ | 2012 |
|
RU2640444C2 |
| УСТАНОВЛЕНИЕ ГРАНИЦ БЛОКИРОВАНИЯ РЕБРОМ В АНАТОМИЧЕСКИ ИНТЕЛЛЕКТУАЛЬНОЙ ЭХОКАРДИОГРАФИИ | 2014 |
|
RU2677191C2 |
| СИСТЕМЫ ВИЗУАЛИЗАЦИИ И СПОСОБЫ ДЛЯ РАСПОЛОЖЕНИЯ ТРЕХМЕРНОГО УЛЬТРАЗВУКОВОГО ОБЪЕМА В ТРЕБУЕМОЙ ОРИЕНТАЦИИ | 2015 |
|
RU2689172C2 |
| КОМБИНАЦИЯ УЛЬТРАЗВУКОВОЙ И РЕНТГЕНОВСКОЙ СИСТЕМ | 2010 |
|
RU2556783C2 |
| НАПРАВЛЯЮЩАЯ СИСТЕМА ДЛЯ ПОЗИЦИОНИРОВАНИЯ ПАЦИЕНТА ДЛЯ МЕДИЦИНСКОЙ ВИЗУАЛИЗАЦИИ | 2016 |
|
RU2714665C2 |
| ТЕРАПЕВТИЧЕСКОЕ УСТРОЙСТВО | 2011 |
|
RU2564082C2 |
Группа изобретений относится к медицинской технике, а именно к средствам сопоставления ультразвуковых изображений для наведения пользователя для достижения целевого вида. Устройство содержит визуализирующий зонд для излучения ультразвука в упомянутый субъект и для приема в ответ текущего ультразвукового вида, модуль сопоставления изображений, выполненный с возможностью сопоставления принятого вида с уже существующим изображением, модуль помощи пользователю и базу данных, содержащую изображения интересующего органа или сосуда и/или окружающей ткани от визуализируемых субъектов, при этом база данных является статистической базой данных, организованной в виде пространства состояний, причём изображения, содержащиеся в ней, включены в пространство состояний и маркированы атрибутами изображений, включающими в себя наблюдаемые анатомические структуры на изображении, качество изображения и положение и ориентацию зонда на поверхностной анатомической структуре, модуль сопоставления изображений дополнительно выполнен с возможностью оценки положения упомянутого принятого вида в пространстве состояний, причём измерения для каждой точки в пространстве состояний соответствуют атрибутам изображения, и модуль помощи пользователю выполнен с возможностью выбора на основании текущего ультразвукового вида и его положения в пространстве состояний соответствующей траектории в пространстве в направлении целевого вида. Устройство снабжено машиночитаемым носителем, на котором реализована программа для обеспечения наведения. Использование изобретений позволяет автоматизировать наведение пользователя системы ультразвукового сканирования на целевой вид. 2 н. и 7 з.п. ф-лы, 6 ил. 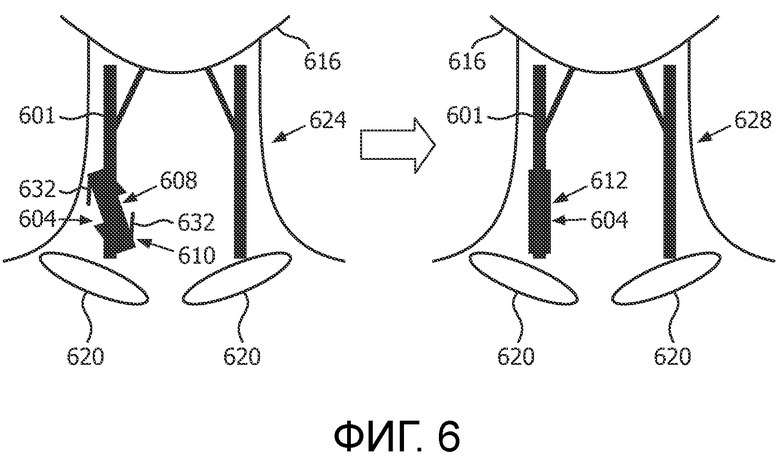
1. Устройство для обеспечения наведения при получении ультразвуковой визуализации субъекта для достижения целевого вида, причем упомянутое устройство содержит:
визуализирующий зонд (144) для излучения ультразвука в упомянутый субъект и для приема в ответ текущего ультразвукового вида;
модуль (108) сопоставления изображений, выполненный с возможностью сопоставления принятого вида с уже существующим изображением;
модуль (112) помощи пользователю; и
базу данных, содержащую изображения интересующего органа или сосуда и/или окружающей ткани от визуализируемых субъектов,
отличающееся тем, что база данных является статистической базой данных, организованной в виде пространства состояний, причём изображения, содержащиеся в упомянутой базе данных, включены в пространство состояний и маркированы атрибутами изображений, включающими в себя наблюдаемые анатомические структуры на изображении, качество изображения и положение и ориентацию зонда на поверхностной анатомической структуре;
причём модуль сопоставления изображений дополнительно выполнен с возможностью оценки положения упомянутого принятого вида в пространстве состояний, причём измерения для каждой точки в упомянутом пространстве состояний соответствуют атрибутам изображения; и
при этом модуль помощи пользователю выполнен с возможностью выбора на основании упомянутого текущего ультразвукового вида и его положения в пространстве состояний соответствующей траектории в упомянутом пространстве в направлении упомянутого целевого вида.
2. Устройство по п. 1, в котором упомянутый зонд имеет текущее размещение, причем упомянутое устройство выполнено с возможностью по меньшей мере одного из демонстрации и инструктирования, как следует перемещать упомянутый зонд из его текущего размещения таким образом, чтобы тем самым реализовать достижение упомянутого целевого вида (510).
3. Устройство по п. 1, в котором упомянутый модуль помощи пользователю дополнительно выполнен с возможностью обнаружения совпадения (S244) между упомянутым целевым видом и принятым видом.
4. Устройство по п. 3, выполненное с возможностью автоматического и без необходимости вмешательства пользователя любого одного или обоих из: a) выполнения уведомления пользователя в ответ на упомянутое обнаружение упомянутого совпадения; и b) получения данных изображения (S252) посредством упомянутого зонда в ответ на упомянутое обнаружение упомянутого совпадения (S244).
5. Устройство по п. 1, дополнительно выполненное с возможностью представления обратной связи (S248), которая инструктирует или показывает, как приблизиться к задаче достижения целевого вида.
6. Устройство по п. 1, дополнительно выполненное с возможностью инициализации автоматически по умолчанию допплеровских настроек в соответствии с теми, которые были предварительно заданы для упомянутого целевого вида при построении базы данных, организованной в виде упомянутого пространства состояний (S404-S464).
7. Устройство по п. 1, дополнительно содержащее сканер (120), выполненный с возможностью формирования упомянутого пространства состояний, причем упомянутое формирование содержит:
получение посредством упомянутого сканера и от визуализируемых субъектов изображений, специализированных для конкретного органа или сосуда организма таким образом, что упомянутый орган или сосуд и/или окружающая ткань изображены на всех изображениях; и
маркирование изображений с использованием соответствующих атрибутов изображений.
8. Устройство по п. 7, в котором упомянутое формирование дополнительно содержит связывание (S436) с конкретными изображениями из числа упомянутых изображений соответствующих инструкций о том, как следует направлять упомянутый зонд от упомянутого конкретного изображения к другому из упомянутых изображений.
9. Машиночитаемый носитель, на котором реализована программа для обеспечения наведения при получении ультразвуковой визуализации субъекта для достижения целевого вида, причем упомянутая программа имеет инструкции, исполняемые процессором, для осуществления операций, причем среди упомянутых операций имеются операции:
излучения ультразвука в упомянутого субъекта;
приёма в ответ посредством визуализирующего зонда текущего ультразвукового вида;
сопоставления принятого ультразвукового вида с уже существующим изображением (503), причём упомянутое уже существующее изображение является одним из изображений интересующего органа или сосуда и/или окружающей ткани от визуализируемых субъектов, причём каждое из упомянутых изображений маркировано атрибутами изображений, включающими в себя наблюдаемые анатомические структуры на изображении, качество изображения и положение и ориентацию зонда на поверхностной анатомической структуре, и при этом упомянутые изображения содержатся в статистической базе данных, которая организована в виде пространства состояний;
оценки местоположения упомянутого принятого вида в пространстве состояний, причём измерения для каждой точки в упомянутом пространстве состояний соответствуют атрибутам изображения; и
формирования на основании упомянутого сопоставления обратной связи для упомянутого наведения путём выбора на основании упомянутого текущего ультразвукового вида и его положения в пространстве состояний соответствующей траектории в упомянутом пространстве состояний в направлении упомянутого целевого вида.
| US 2012065510 A1, 15.03.2012 | |||
| US 2010331700 A1, 30.12.2010 | |||
| US 2007081706 А1, 12.04.2007 | |||
| US 5906578 A, 25.05.1999 | |||
| Sten Roar Snare et al., Real-Time Scan Assistant for Echocardiography, IEEE Transactions on Ultrasonics, Ferroelectrics, and Frequency Control, vol | |||
| Устройство для охлаждения водою паров жидкостей, кипящих выше воды, в применении к разделению смесей жидкостей при перегонке с дефлегматором | 1915 |
|
SU59A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |

