ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к визуализации анатомической структуры и, более конкретно, к модификации визуализации на основе анатомической структуры при визуализации.
УРОВЕНЬ ТЕХНИКИ
Точные анатомические измерения необходимы для подготовки к лечению и для диагностики многих кардиальных состояний. Золотым стандартом при лечении стеноза аортального клапана является хирургическая замена аортального клапана. Требуется операция на открытом сердце, однако она не является выбором в случае некоторых пожилых пациентов. Недавно разработанной, несоизмеримо менее инвазивной альтернативой является транскатетерная аортальная имплантация клапана (ТИАК). С помощью катетера заменяющий клапан продвигают внутривенно и помещают в местоположение существующего, дефектного клапана. При подготовке определяют диаметр кольца аортального клапана. В качестве другого примера, диаметр восходящей аорты вычисляют для оценки потенциала возникновения аневризмы.
Медицинская визуализация представляет собой неинвазивный метод выполнения анатомических измерений. В области обработки медицинских изображений, в отношении изображений выполняются различные задачи обработки. Одной из определенных задач обработки, которая является фундаментальной задачей во многих областях применения обработки изображений, является сегментация определенного органа. Сегментация многих органов может быть успешно выполнена с применением деформируемых моделей с ограничениями на форму. Они основаны на сетчатой структуре, топология которой остается неизменной во время адаптации к сегментируемому изображению. Сегментацию на основе модели считали очень эффективной для целого ряда органов, от простых до сложных (например, костей, печени и сердца с вложенными структурами). Действительно, недавние результаты показывают, что данная методика позволяет проводить полностью автоматическую сегментацию сложных анатомических структур, таких как сердце.
В принадлежащей настоящему заявителю патентной публикации США 2008/0304744 (Peters et al.) (в дальнейшем "заявка 744"), все описание которой включено в настоящий документ посредством отсылки, анатомическую модель адаптируют к трехмерному (3D) ультразвуковому изображению, и адаптированную модель кодируют для последующего автоматического исполнения определенных задач по обработке изображения, таких как локализация и трекинг целевых анатомических структур.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Такие преимущества эхокардиографии, как отсутствие ионизации, высокое разрешение и высокий контраст тканей, позволяют выполнять быструю диагностику и надежное управление в области интервенционных применений.
Быстрый диагноз требует срочного получения стандартных проекций. Это является сложным, поскольку пользователю требуется регулировать положение зонда ультразвукового преобразователя для оптимального захвата стандартных проекций (например, двумерных изображений, X-плоскостей, которые являются двумя проекциями, пересекающими вершину (аксиально ближнюю точку) изображения или получения выбранного объемного изображения).
Кроме того, соотношение между плотностью пучка, размером исследуемого объема и кадровой частотой в трехмерной эхокардиографии делает точную количественную оценку сложной при наблюдении сложных структур, таких как корень аорты или аневризмы аорты.
Точные измерения требуют высокой плотности пучка, которую сложно достичь при визуализации большого объема с высокой кадровой частотой. Обычно решение состоит в получении только двумерных изображений или набора двумерных изображений (например, X-плоскостей) с правильной ориентацией и выполнении измерения по таким изображениям. Ориентацию плоскостей требуется при этом тщательно выбирать.
В случае аневризмы восходящей аорты, например, важен выбор правильной плоскости визуализации. Этот выбор, впрочем, сильно зависит от ориентации зонда, анатомической структуры восходящей аорты и навыков оператора. Например, положение трансэзофагального (TEE) ультразвукового зонда относительно определенной целевой кардиальной анатомической структуры изменяется среди пациентов.
Сегментация кардиальной проекции целого сердца в трехмерном ультразвуковом исследовании оказывает нежелательное влияние на плотность пучка и/или кадровую частоту, как отмечено выше. В частности, сканирование с применением двумерной TEE или TTE матрицы преобразователей в азимутальных направлениях и направлениях повышения выполняют с частотой, которая ограничена потребностью в приеме отраженного сигнала пучка до подачи следующего смежного пучка. Ультразвук является медленным по сравнению с другими методами визуализации, он проходит через ткань тела со скоростью лишь 1540 метров в секунду. Поэтому, при типичной частоте обновления дисплея приблизительно 25 Гц, плотность пучка, то есть количество лучей через сектор, является относительно низкой. Например, при 20-30 Гц доступными могут быть лишь несколько сотен проходящих пучков. На пространственное разрешение, следовательно, также оказывается влияние.
Для повышения пространственного разрешения при анатомических измерениях в определенных медицинских применениях в настоящем документе ниже предложено применять трехмерную анатомическую модель и, в следующем этапе и на основе распознавания анатомической структуры, повышать плотность пучка с одновременным уменьшением исследуемого объема. Затем увеличение разрешения усиливают для лучшей адаптации модели и, следовательно, большей точности количественного выражения. Процедуру выполняют в реальном времени. В настоящем документе "реальное время" означает без преднамеренной задержки, с учетом технологических ограничений системы и времени, требуемого для точной обработки данных.
В аспекте настоящего изобретения устройство служит для выбора одной или более частей объема на основе распознавания анатомической структуры из трехмерной визуализации объема в реальном времени. Трехмерная визуализация объема в реальном времени может содержать или полную проекцию или лишь частичную проекцию исследуемого органа. Выбор выполняется автоматически, в ответ на полученное изображение, и без необходимости вмешательства пользователя. Выбор выполняют с целью оптимального быстрого получения стандартных проекций или для специальных проекций, требуемых для точных измерений и количественной оценки. Устройство также служит для получения, автоматически и без необходимости вмешательства пользователя, в ответ на выбор, визуализации одной или более выбранных частей в реальном времени с более высокой плотностью пучка, чем при визуализации исследуемого объема.
В одном другом аспекте одна или более плоскостей визуализации соответственно содержат одну или более частей.
В другом аспекте визуализацию части избирательно прерывают для повторного выполнения визуализации объема.
В следующем аспекте прерывание происходит периодически.
В другом аспекте устройство служит для обнаружения относительного перемещения относительно соответствующих положений визуализирующего зонда и ткани тела. Прерывание вызывается при обнаружении перемещения.
В другом аспекте устройство служит для выполнения, автоматически и без получения пользователя, последовательности этапов. Указанная последовательность содержит визуализацию объема, распознавание, выбор, визуализацию части, прерывание, повторное выполнение визуализации объема и, на основе повторно выполненной визуализации объема, распознавание, выбор и визуализацию части.
В дополнительном аспекте устройство содержит дисплей и служит для отображения на дисплее по меньшей мере одной из одной или более выбранных частей.
В подаспекте устройство служит для отображения, одновременно с отображением по крайней мере одной части, проекции в перспективе, которая включает ткань тела, прилегающую к соответствующей отображаемой части.
В дополнительном аспекте устройство служит, посредством указанного одного визуализирующего зонда, и для визуализации объема, и для визуализации части.
В другом аспекте зонд предназначен для интракорпорального применения.
В еще одном аспекте визуализация объема содержит ультразвуковую визуализацию.
В одном другом аспекте выбор основан на критерии оптимальной проекции.
В подаспекте критерий основан на создании направленного анатомического измерения из изображения, получаемого при визуализации частей.
В другом подаспекте выбор обеспечивает получение, в соответствии с критерием, оптимальной ориентации.
В связанном аспекте визуализация объема содержит кардиальную визуализацию.
В некоторых вариантах осуществления устройство включает пользовательский интерфейс для определения, на основе анатомической модели, согласованной с данными, полученными при визуализации объема, плоскости визуализации.
В дополнительном аспекте устройство также служит для вычисления, автоматически и без необходимости вмешательства пользователя, угла Доплера на основе применения анатомической модели к визуализации части и/или визуализации объема.
В другом дополнительном аспекте выбор является таким, который позволяет оптимизировать измерение расстояния между заданными анатомическими точками в ткани тела, представленной данными, полученными при визуализации объема.
В другом связанном аспекте устройство служит для получения, на основе распознавания анатомической структуры, инициирующего измерение знака. Оно также служит для вывода на дисплей производного знака для инициализации основанного на изображении измерения в пределах изображения, полученного при визуализации частей.
В подаспекте получение включает применение анатомической модели по меньшей мере в одной из выбранных частей.
В еще одном дополнительном аспекте выбор выполняют так, чтобы получить либо парастернальную продольную проекцию, парастернальную поперечную проекцию, подреберную проекцию или апикальную проекцию (например, четырехкамерный срез). Произвольные проекции, связанные с визуализируемой анатомической структурой, или совмещенные мультимодальные проекции также могут рассматриваться для выбора.
В еще одном другом аспекте устройство служит для выбора таким образом, чтобы часть объема охватывала заданные анатомические ориентиры в ткани тела, которая представлена данными, полученными при визуализации объема.
В альтернативном представлении устройство служит для использования параметров формирования пучка для получения визуализации анатомической структуры. Устройство также служит для регулирования, автоматически и без необходимости вмешательства пользователя, параметров на основе анатомической структуры в полученном изображении с целью улучшения визуализации в одной или более направленных проекциях.
Детали в отношении нового устройство выбора визуализации объема-части представлены ниже, при посредстве следующих чертежей, которые показаны не в масштабе.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
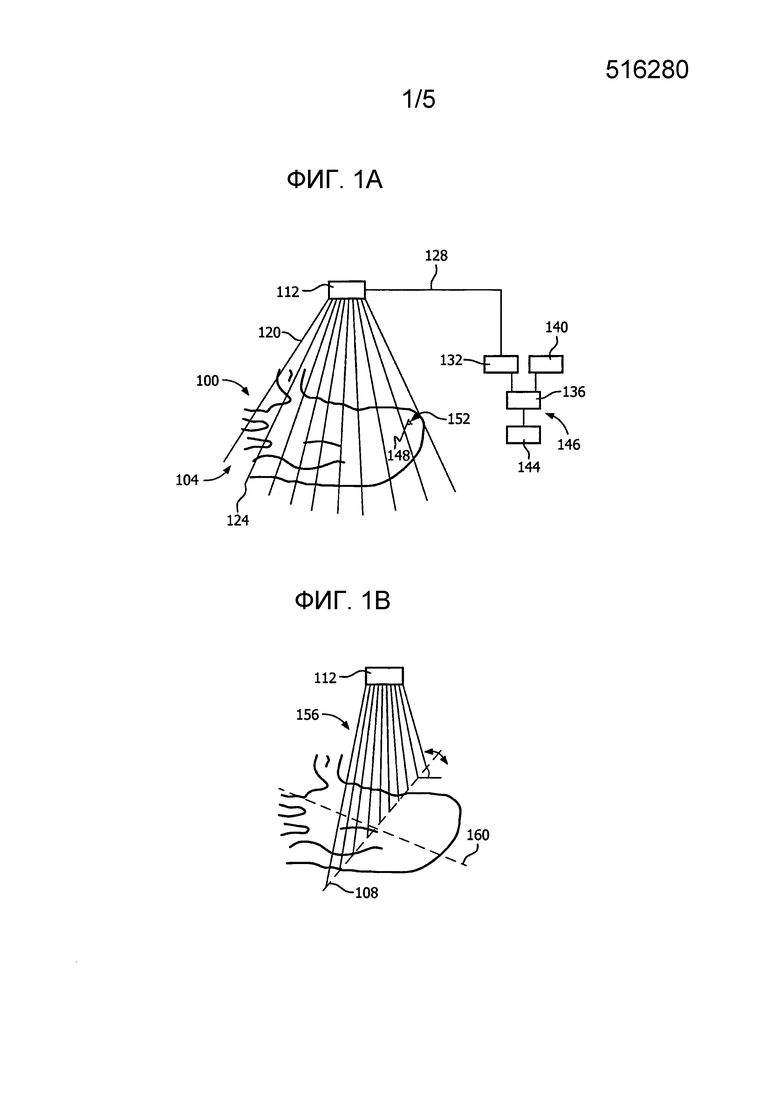
Фиг. 1A и 1B являются концептуальными схемами визуализации объема и визуализации плоскости, соответственно.
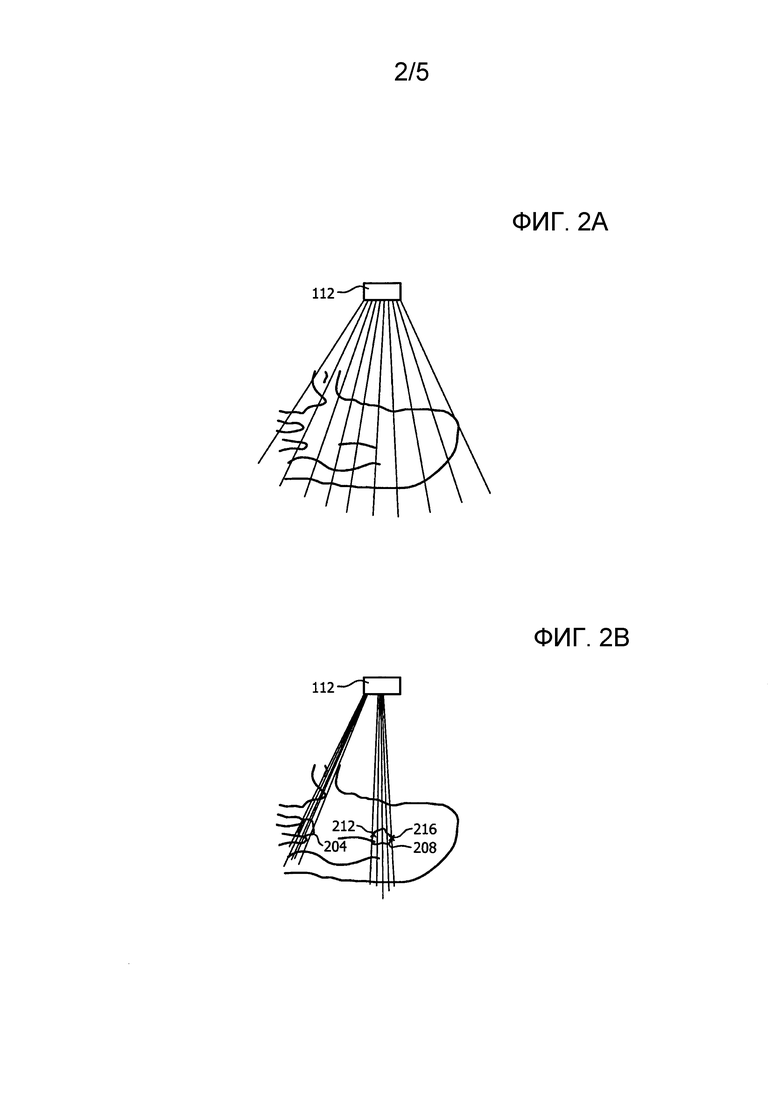
Фиг. 2A и 2B являются концептуальными схемами визуализации объема и визуализации части, соответственно.
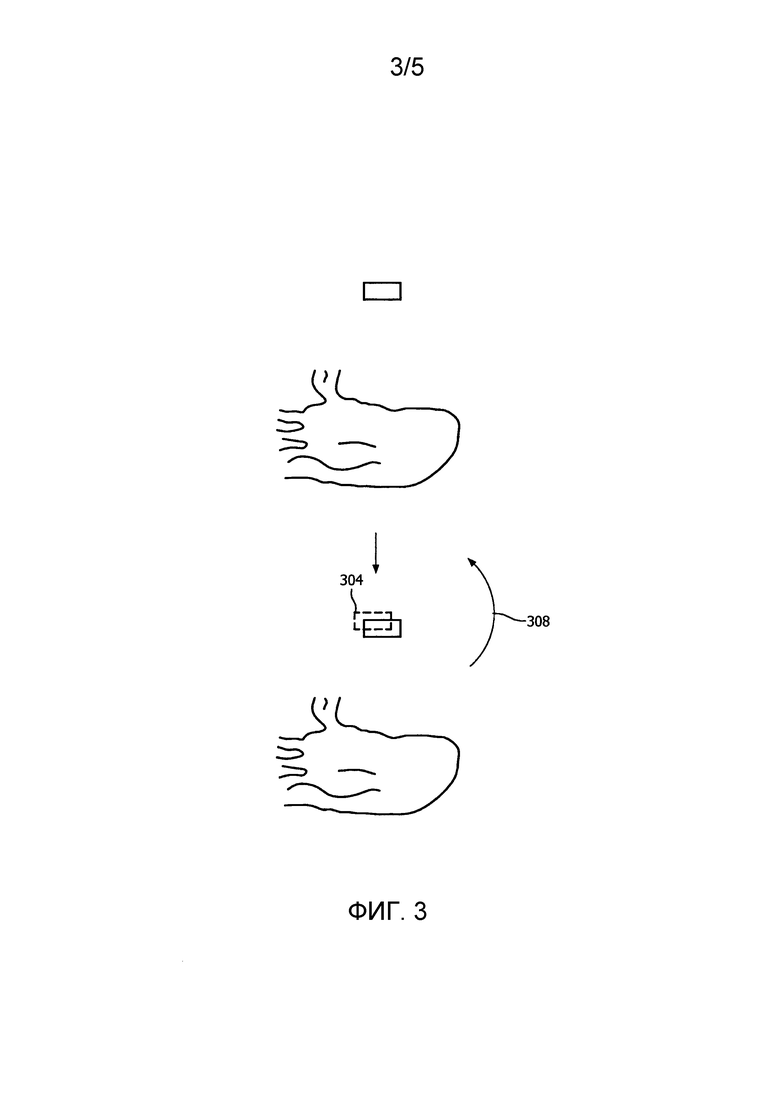
Фиг. 3 является концептуальной схемой основанного на перемещении прерывания визуализации части и ответного повторного выполнения визуализации объема.
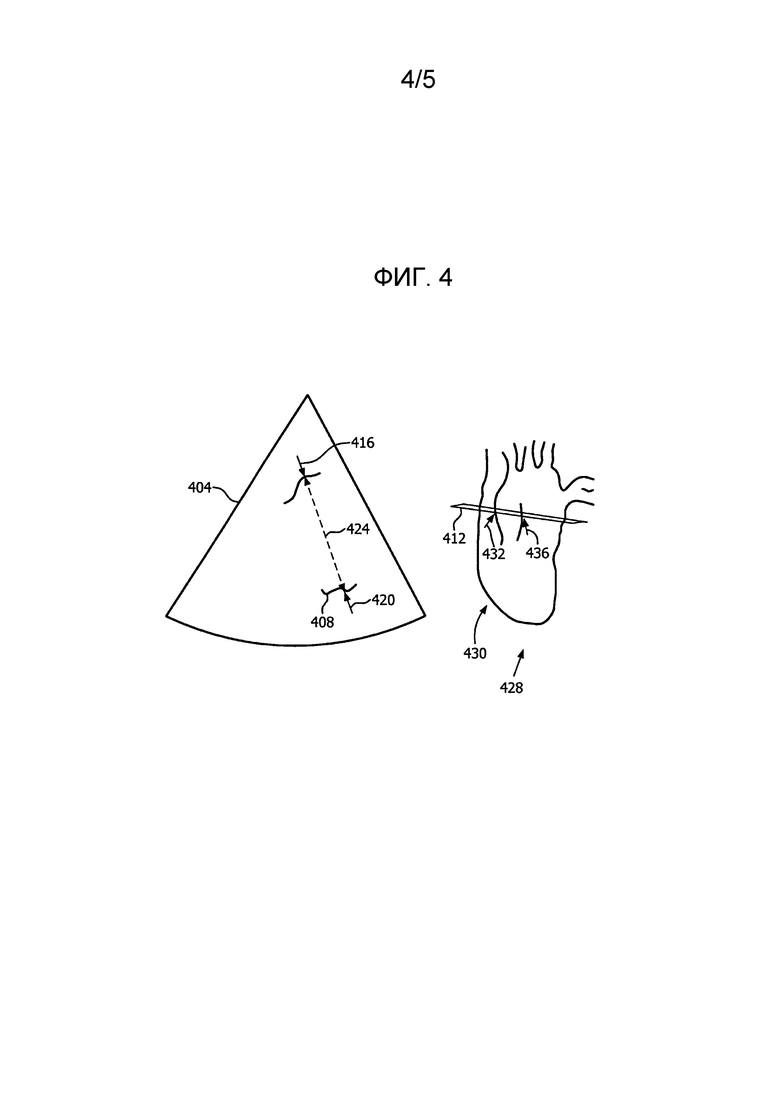
Фиг. 4 является изображением проекций на дисплее и индикации, инициализирующей измерение.
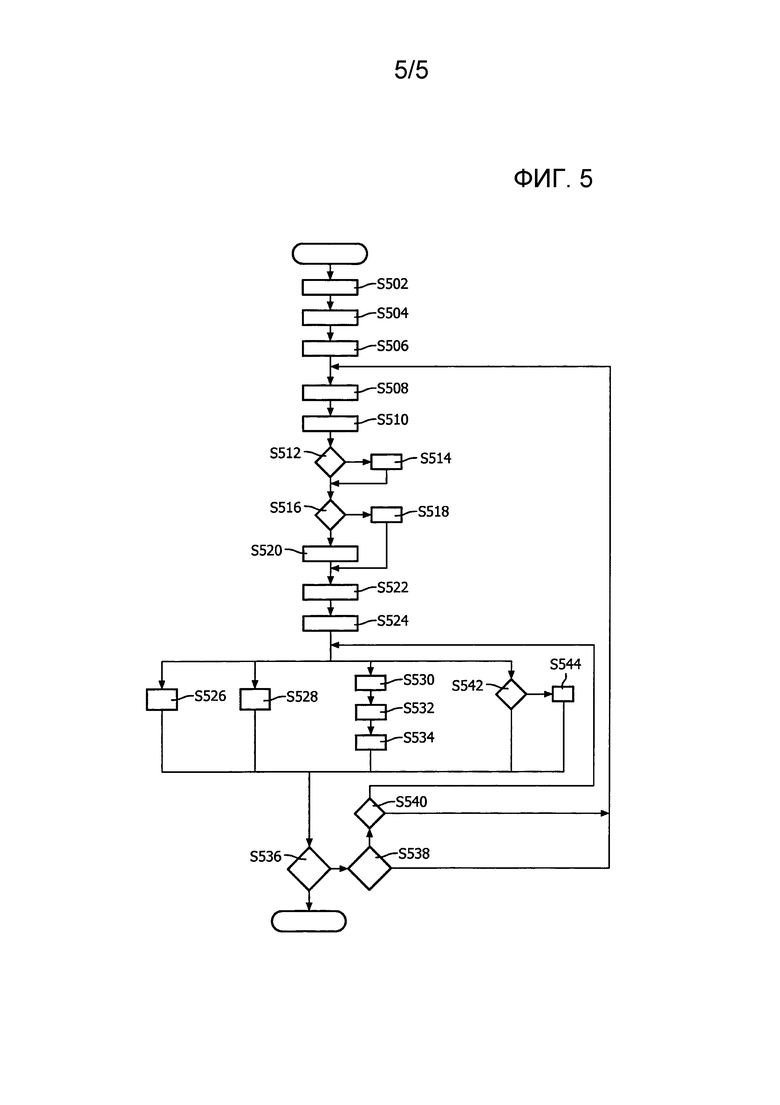
Фиг. 5 является схемой последовательности этапов для устройства выбора визуализации объема-части.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
На Фиг. 1A и 1B, в качестве иллюстративного и неограничивающего примера, показана визуализация в реальном времени объема 100, например, всего сердца 104 человека или животного, при этом данная визуализация впоследствии уменьшается до визуализации в реальном времени в пределах одной плоскости 108 визуализации. Визуализация, в обоих случаях, выполняется зондом 112. Для применений в кардиологии зонд 112 может быть зондом TEE, для интракорпорального применения, или зондом TTE. Зонд TEE вводят по пищеводу в положение для визуализации. В случае TTE визуализирующий конец зонда 112 обычно удерживается рукой и управляется специалистом по ультразвуковой эхографии, кардиологом или специалистом по лучевой диагностике. В случае TEE, зонд 112 обычно управляется с помощью одного или более тросов для направления, при этом мультиплоскостной зонд вращается в пищеводе вручную или мотором. Такое маневрирование может быть выполнено по изображению, выводимому на окно визуализации в зонде 112, через которое осуществляется ультразвуковая визуализация. После установки зонда 112 надлежащим образом, можно приступать к визуализации объема. TEE или TTE зонд 112 имеет двумерную матрицу преобразователей. Для простоты иллюстрации на Фиг. 1A показано сканирование по одному направлению. Таким образом, обратный сигнал от первого пучка 120 ожидается в течение временного окна регистрации, после чего подается второй пучок 124 в скане. Поскольку в случае TEE зонд 112 расположен внутри близко к объему 100 визуализации, время прохождения ультразвука уменьшается. Соответственно, плотность пучка и, таким образом, пространственное разрешение, являются более высокими в случае TEE зонда 112, чем в случае трансторакального (TTE) зонда, используемого внешне и обычно вручную. Кроме того, увеличенная четкость визуализации может быть также обусловлена с меньшим ослаблением, то есть на меньшем расстоянии. И все же, принципы, обсуждаемые в настоящем документе, также применимы к зонду TTE. Аналогичным образом, ткань тела, кроме сердца, например, плода, включена в предполагаемый объем изобретения, предложенного в настоящем документе.
Зонд 112 подключен, посредством кабеля 128, к модулю регистрации изображения 132. Последний коммуникативно связан с процессором 136, имеющим машиночитаемый носитель. Процессор 136 также коммуникативно связан с индикаторным устройством 140 и пользовательским интерфейсным блоком 144. Все они являются компонентами устройства 146 выбора визуализации объема-части в данном примере.
Как и в "заявке 744", кардиальная сетчатая модель адаптируется к полученному трехмерному изображению объема. Адаптация может быть выполнена для конкретной фазы сокращающегося сердца. В альтернативе, она может быть выполнена отдельно для нескольких фаз и может быть повторена, в данном смысле, периодически и непрерывно. На данном этапе, и/или позже, информация по анатомическим ориентирам, ранее закодированная в модели, может быть связана с соответствующими местоположениями на 3D изображении. В качестве дополнительного применения, если целевой кровеносный сосуд 148 в сетке расположен в объеме визуализации, определенная ориентация сосуда относительно зонда 112 может использоваться при автоматическом вычислении угла 152 Доплера.
В режиме реального времени одна или более частей объема 100 выбирается автоматически для последующей визуализации в реальном времени, при большей плотности 156 пучка. Например, плоскость 108 визуализации, или X-плоскость, через объем 100 может включать выбранную часть объема. Если выбрано больше одной части, то они могут содержаться в пределах соответствующих плоскостей 108, 160 визуализации.
Выбор содержит коррекцию, для визуализации части в реальном времени, параметров формирования пучка, только что полученных для визуализации объема. Коррекция основана на анатомических структурах в полученном изображении объема для улучшения визуализации в одной или более целевых проекциях, таких как стандартные диагностические проекции или проекции, облегчающие точные измерения между анатомическими ориентирами или точками.
Выбор основан на специализированном критерии оптимальной проекции. В случае общей диагностической визуализации выбор выполняют так, чтобы получить стандартные проекции относительно анатомической структуры. Примерами стандартных проекций сердца является четырехкамерная (или "апикальная") проекция, парастернальная продольная проекция, парастернальная поперечная проекция и подреберная проекция. Дополнительные примеры включают произвольные проекции, связанные с визуализируемыми анатомическими структурами, или совмещенные мультимодальные проекции. Для измерения аневризмы аорты, аорту идентифицируют с применением модели. Плоскость 108 визуализации выбирают перпендикулярно геометрической оси аорты и в соответствии с максимальным диаметром, при смещении плоскости обзора вдоль оси. В качестве второго примера, планирование ТИАК включает использование модели для идентификации клапана аорты. Информацию, закодированную в модели, как и в "заявке 744", например, кольцо вокруг кольца аортального клапана, соотносят с трехмерным изображением. Затем выбирают пару плоскостей 108, 160 визуализации для оптимального сечения кольца таким образом, чтобы полученные 2D изображения позволяли выполнить правильные измерения диаметра кольца аортального клапана, при этом выбор плоскости по определению включает выбор ориентации. Наряду с отображением 2D изображения индикация, накладываемая на изображение, показывает клиническому врачу, где сделать измерение. Автоматический выбор облегчает вышеуказанную типичную проблему ручного выбора, сильно зависящего от ориентации зонда, анатомии конкретного пациента и навыков оператора. Клинический врач в альтернативе может определить и сохранить плоскости визуализации через пользовательский интерфейсный блок 144. Это может быть выполнено в интерактивном режиме с выводом визуализируемого объема на индикаторное устройство 140.
Выбранные плоскости 108, 160 отображаются как изображение в реальном времени, полученное с оптимальной плотностью 156 пучка, и последовательное улучшенное изображение, и с наложением инициализирующей измерение индикации.
На Фиг. 2A и 2B выбранные части 204, 208 объема 100, которые выходят за пределы плоскости визуализации, отображаются в режиме реального времени в 3D. Как продемонстрировано в примере осуществления на Фиг. 2A и 2B, визуализация части, частным случаем которой является визуализация плоскости, аналогично проходит при более высокой плотности пучка. Для иллюстрации, индикации 212, 216, которые в данном случае являются анатомическими точками, связаны с выбранной частью 208. Индикации 212, 216 могут быть выведены на дисплей для инициализации измерения между ними клиническим врачом, смотрящим на индикаторное устройство 140.
В течение времени относительное перемещение может происходить относительно соответствующих положений визуализирующего зонда 112 и визуализируемой ткани тела. Кроме того, в случае TTE пациент, которого могут просить задержать свое дыхание, или клинический врач могут сделать неосторожное движение.
Относительное движение может привести к выходу визуализации в реальном времени из выравнивания, то есть из соответствия с ранее вычисленными параметрами формирования пучка, чувствительными к выбору части.
Как показано пунктирной линией, на Фиг. 3 показано перемещение 304 визуализирующего зонда 112 относительно исследуемого объема 100 в данной фазе сокращающегося сердца. Это может быть обнаружено при сравнении, для данной фазы, текущего изображения с предыдущими, сохраненными изображениями. Сравнение производят во время визуализации части, частным случаем которой является визуализация плоскости. Сравнения могут производиться периодически или непрерывно для обнаружения перемещения. Если перемещение обнаружено, визуализация части прерывается 308, и обнаружение объема выполняется повторно. Таким образом, распознавание анатомической структуры, которое адаптирует модель к трехмерной визуализации, ведет, на основе повторно выполненного обнаружения объема, к выбору одной или более частей и визуализации выбранной части(ей). Повторное выполнение визуализации объема, а затем части, в альтернативе может проходить периодически, независимо от любого относительного перемещения, но в качестве меры предосторожности в случае перемещения.
На Фиг. 4 показан один пример двумерного изображения 404 в реальном времени восходящей аорты 408, при этом изображение существует в выбранной плоскости визуализации 412. Из-за вероятности аневризмы необходимо точное измерение. На изображении 404 наложены инициализирующие измерение индикации 416, 420 в форме стрелок. Показано измерение диаметра 424 восходящей аорты в ее наиболее широком участке. Местоположения индикаций 416, 420 получают после идентификации восходящей аорты при адаптации модели. Информация, закодированная в местоположении, на сетке, которая соответствует аорте, приводит к поиску максимального диаметра по геометрической оси аорты.
Перспективное изображение 428 появляется на экране дисплея вместе с двумерным изображением 404. Отображается "срез" или плоскость визуализации 412, как и прилегающая ткань тела 430 в объеме 100. Индикации 432, 436 соответствуют индикациям 416, 420 в двумерном изображении 404.
При подготовке устройства 146 выбора визуализации объема-части к работе, и как указано в примерной последовательности этапов на Фиг. 5, два этапа (этапы S502, S504) могут быть выполнены по порядку или одновременно. Выбирается клиническое применение (этап S502), такое как выбор стандартных проекций, произвольных проекций, связанных с визуализируемой анатомической структурой, наложение мультимодальных проекций, измерение аортального клапана или измерение восходящей аорты. Анатомическая модель, такая как кардиальная сетчатая модель, закодирована с информацией для инициализации измерения (этап S504). 3D TEE/TTE зонд 112 затем перемещают в положение для визуализации объема (этап S506). Этому может способствовать 2D или 3D визуализация с обратной связью.
В этот момент процедура готова начаться автоматически и без необходимости вмешательства пользователя. В альтернативе, в этот момент, оператор может привести в действие элементы управления для инициирования дальнейшей обработки. Это может осуществляться в ответ на то, что оператор видит на экране в 3D дисплее. Объемные данные объема 100 регистрируются во время визуализации в реальном времени (этап S508). Анатомическая модель корректируется по данным, полученным при визуализации объема, то есть по регистрируемому изображению (этап S510). Коррекция может производиться после одного или двух сердечных сокращений прогрессивно, например, или может задерживаться до полной регистрации, которая дает проекцию, состоящую из нескольких сердечных сокращений. Если требуется вычислить параметр Доплера (этап S512), он вычисляется (этап S514). В любом случае, если одна или более частей 204, 208 должны быть выбраны оператором (этап S516), такие части, как плоскости визуализации, посредством пользовательского интерфейсного блока 144, определяются и сохраняются (этап S518). Сохраненные части используются таким же образом, как и автоматически выбранные части, и, после сохранения, они могут быть повторно выбраны при переходе к заранее установленному выбору. В режиме реального времени одну или больше частей 204, 208 получают автоматически, на основе адаптированной сетки и информации, закодированной в ней (этап S520). Как только выбор, автоматический или ручной, выполнен, вычисляются параметры формирования пучка и другие параметры настройки изображения для визуализации части (этап S522). Закодированная информация связана с соответствующими одним или несколькими местоположениями визуализации (этап S524).
В этот момент одна или более выбранных частей 108, 160, 204, 208 отображаются вместе, в режиме реального времени, с высокой плотностью пучка и кадровой частотой, с получением более точных измерений, чем могла бы позволить трехмерная визуализация объема (этап S526).
Показ изображений может начаться в режиме реального времени (этап S528). Модель наложена к данным, приобретенным в текущем отображении части (этап S530). Закодированная информация и индикация связаны с местоположениями изображения (этап S532). Индикация выводится на дисплей (этап S534). На данном этапе оператор, посредством пользовательского управления, может регулировать изображение, например, угол наклона плоскости, при возвращении к этапу S516.
Если визуализация части все еще продолжается (этап S536), но обнаружено перемещение анатомической структуры относительно зонда 112 (этап S538), процесс возвращается к этапу S508 для повторного получения объемных данных исследуемого объема 100. Если визуализация части все еще продолжается (этап S540), при этом никакого перемещения не обнаружено (этап S538), и повторное выполнение получения изображений исследуемого объема является периодическим (этап S540), процесс также возвращается к этапу S508, если текущий период истек, и сразу после этапа S524 в другом случае, для продолжения визуализации части в реальном времени.
Изображения на дисплее в этапах S528 и S534 могут быть зафиксированы, автоматически или оператором, для измерения. Изображения могут быть также сделаны частью анимации. Если части являются плоскостями (этап S542), перспективная проекция 428 анатомической структуры, рассеченная плоскостью, показывается рядом с изображением в реальном времени или зафиксированным изображением части на дисплее (этап S544).
Вычисление параметра Доплера в этапе S514 может быть альтернативно выполнено на основе визуализации части.
В качестве альтернативы или в дополнение к отображению изображения на дисплей, которое начинается в режиме реального времени, визуализация объема и визуализация части, полученные на их основе анимационные повторы, и анатомическая сетчатая модель, могут сохраняться в формате DICOM (Digital Imaging and Cоmmunication in Medicine) для последующего анализа и количественной оценки.
На основе распознавания анатомической структуры из трехмерной ультразвуковой визуализации объема в реальном времени одну или более частей объема выбирают в режиме реального времени. При последующем отклике в режиме реального времени визуализация части(ей) в реальном времени выполняется при более высоких плотности пучка и общем качестве изображения, чем при визуализации объема. Одна или несколько частей могут быть одной или несколькими плоскостями визуализации, выбранными для оптимальной ориентации при выполнении анатомического измерения или оптимальной ориентации стандартных проекций для диагностической визуализации. Произвольные проекции, связанные с визуализируемой анатомической структурой, или совмещенные мультимодальные проекции также могут рассматриваться. Распознавание может быть основано на анатомической модели, такой как сетчатая кардиальная модель. Модель может быть предварительно закодирована информацией, которая может быть связана с местоположениями изображения, для обеспечения основания для выбора части и для размещения индикации, отображаемой на дисплее для инициирования измерения в пределах изображения, обеспечиваемого визуализацией части в реальном времени. Один визуализирующий зонд TEE или TTE может использоваться во всех случаях. По запросу, периодически или при обнаружении перемещения зонда относительно анатомической структуры, весь процесс может быть выполнен повторно, начиная с обнаружения объема.
Применения технологии автоматического выбора части объема визуализации включают кардиальную визуализацию с использованием 3D TTE/TEE зонда. Примерами являются визуализация клапана аорты и восходящей аорты и, в особенности, измерения аортального корня при подготовке к замене клапана аорты и точные измерения восходящей аорты. Дополнительным примером является оптимальный выбор плоскостей стандартных проекций, требуемых в диагностической визуализации. Произвольные проекции, связанные с визуализируемой анатомической структурой, или совмещенные мультимодальные проекции также являются дополнительными примерами.
Хотя изобретение было иллюстрировано и подробно описано на чертежах и в предыдущем описании, такие иллюстрации и описание следует считать иллюстративными или примерными и неограничивающими; изобретение не ограничено раскрытыми вариантами осуществления.
Например, расстояния между плоскостью клапана аорты и устьями коронарных артерий могут быть вычислены на основе методик, раскрытых выше. В качестве другого примера, прерывание визуализации части с целью повторного выполнения регистрации изображений объема может быть выполнено по запросу оператором.
Другие вариации раскрытых вариантов осуществления могут быть поняты и произведены квалифицированными специалистами при осуществлении заявленного изобретения, на основе изучения чертежей, описания и прилагаемой формулы изобретения. В формуле изобретения слово "содержащий" не исключает другие элементы или этапы, и упоминание элементов или этапов в единственном числе не исключает их множества. Любые условные обозначения в формуле изобретения не должны рассматриваться как ограничение объема изобретения.
Компьютерная программа может быть сохранена на текущий момент, временно или на более длительный период времени на подходящем машиночитаемом носителе, таком как оптический носитель данных или полупроводниковый носитель. Такой носитель является энергонезависимым только в смысле того, что он не является временным, распространяющим сигнал, но включает другие формы машиночитаемых носителей, таких как регистровая память, кэш процессора, RAM и другая энергозависимая память.
Один процессор или другой блок могут выполнять функции нескольких элементов, указанных в формуле изобретения. Сам по себе тот факт, что некоторые характеристики указаны во взаимно различных зависимых пунктах формулы, не означает, что комбинация этих характеристик не может использоваться для получения преимущества.
Группа изобретений относится к средствам визуализации анатомической структуры. Система визуализации, осуществляющая связь с визуализирующим зондом, содержит один или более процессоров, запрограммированных с использованием компьютерных программных инструкций, которые при исполнении побуждают систему принимать объемные данные, полученные из трехмерной визуализации объема анатомической структуры в реальном времени при первой плотности пучка, корректировать трехмерную анатомическую модель по объемным данным, используя распознавание анатомической структуры, использовать скорректированную трехмерную модель для выбора одной или более частей анатомической структуры для визуализации частей в реальном времени при второй плотности пучка, причем вторая плотность пучка больше первой плотности пучка, инициировать визуализацию частей в реальном времени в отношении выбранных частей при второй плотности пучка, избирательно прерывать визуализацию частей в реальном времени в отношении выбранных частей для повторного выполнения визуализации объема анатомической структуры в реальном времени при первой плотности пучка, принимать обновленные объемные данные, полученные из повторно выполненной визуализации объема в реальном времени, выполнять распознавание анатомической структуры для корректировки трехмерной анатомической модели согласно упомянутым обновленным объемным данным, и автоматически и без необходимости вмешательства пользователя, повторно инициировать визуализацию частей в реальном времени в отношении выбранных частей при второй плотности пучка. Система визуализации содержит постоянный машиночитаемый носитель данных, на котором сохранены машиночитаемые инструкции. Использование изобретений позволяет проводить автоматическую сегментацию сложных анатомических структур. 2 н. и 13 з.п. ф-лы, 5 ил.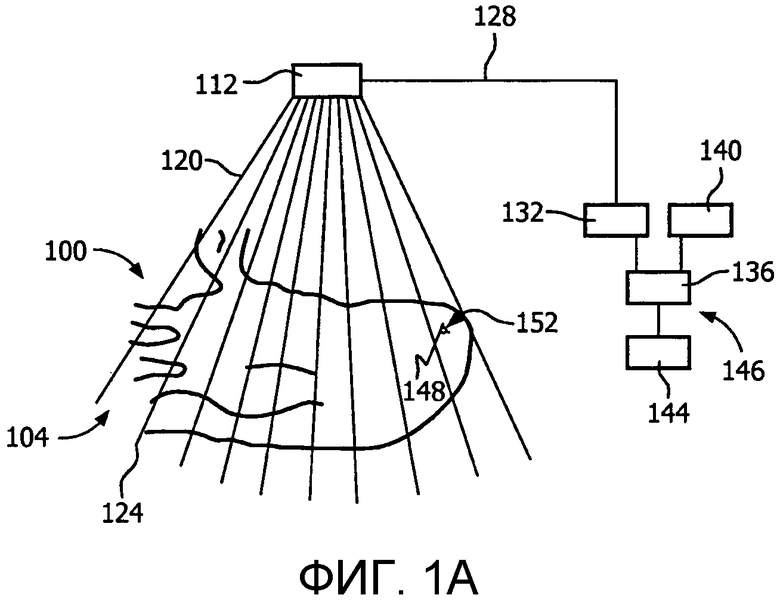
1. Система визуализации, осуществляющая связь с визуализирующим зондом, причем система визуализации содержит один или более физических процессоров, запрограммированных с использованием компьютерных программных инструкций, которые при исполнении побуждают систему:
принимать объемные данные, полученные из трехмерной визуализации объема анатомической структуры в реальном времени при первой плотности пучка;
корректировать трехмерную анатомическую модель по упомянутым объемным данным, используя распознавание анатомической структуры;
использовать скорректированную трехмерную модель для выбора одной или более частей упомянутой анатомической структуры для визуализации частей в реальном времени при второй плотности пучка, причем вторая плотность пучка больше первой плотности пучка;
инициировать визуализацию частей в реальном времени в отношении выбранных частей при второй плотности пучка;
избирательно прерывать визуализацию частей в реальном времени в отношении выбранных частей для повторного выполнения визуализации объема анатомической структуры в реальном времени при первой плотности пучка;
принимать обновленные объемные данные, полученные из упомянутой повторно выполненной визуализации объема в реальном времени;
выполнять распознавание анатомической структуры для корректировки трехмерной анатомической модели согласно упомянутым обновленным объемным данным и,
автоматически и без необходимости вмешательства пользователя, повторно инициировать визуализацию частей в реальном времени в отношении выбранных частей при второй плотности пучка.
2. Система по п. 1, в которой одна или более частей содержат одну или более плоскостей визуализации.
3. Система по п. 1, выполненная с возможностью прерывать визуализацию частей в реальном времени в отношении выбранных частей периодически.
4. Система по п. 1, выполненная с возможностью обнаруживать относительное перемещение между положениями визуализирующего зонда, который выполнен с возможностью выполнять как визуализацию объема в реальном времени, так и визуализацию частей в реальном времени в отношении выбранных частей, и анатомической структуры, и прерывать визуализацию частей в реальном времени в отношении выбранных частей на основе обнаруженного относительного перемещения.
5. Система по п. 1, выполненная с возможностью выбирать упомянутую одну или более частей на основе критерия оптимальной проекции.
6. Система по п. 5, в которой упомянутый критерий оптимальной проекции основан на выполнении направленного анатомического измерения по изображению, которое должно быть получено при визуализации частей в реальном времени в отношении выбранных частей.
7. Система по п. 5, в которой упомянутый выбор упомянутой одной или более частей включает в себя выбор, согласно упомянутому критерию оптимальной проекции, оптимальной ориентации.
8. Система по п. 1, в которой визуализация объема в реальном времени содержит кардиальную визуализацию.
9. Система по п. 1, выполненная с дополнительной возможностью, автоматически и без необходимости вмешательства пользователя, вычислять угол Доплера на основе применения анатомической модели по меньшей мере к одной из визуализации частей в реальном времени в отношении выбранных частей и визуализации объема в реальном времени.
10. Система по п. 1, в которой упомянутый выбор упомянутой одной или более частей выполняется таким образом, чтобы оптимизировать измерение расстояния между заданными анатомическими точками в пределах анатомической структуры, представленной объемными данными, полученными при визуализации объема в реальном времени.
11. Система по п. 1, выполненная с дополнительной возможностью, на основе распознавания анатомической структуры, получать индикацию и отображать полученную индикацию для инициализации основанного на изображении измерения в пределах изображения, полученного при визуализации частей в реальном времени в отношении выбранных частей.
12. Система по п. 11, в которой упомянутое получение содержит применение анатомической модели по меньшей мере к одной из упомянутой одной или более выбранных частей.
13. Система по п. 1, в которой упомянутый выбор упомянутой одной или более частей выполняется таким образом, чтобы часть из упомянутой одной или более частей охватывала заданный анатомический ориентир в пределах анатомической структуры, которая представлена объемными данными, полученными при визуализации объема в реальном времени.
14. Система по п. 1, в которой упомянутый выбор упомянутой одной или более частей включает в себя выбор плоскости визуализации, перпендикулярной геометрической оси аорты и соответствующей максимальному диаметру, при смещении плоскости визуализации по геометрической оси.
15. Постоянный машиночитаемый носитель данных, на котором сохранены машиночитаемые инструкции, которые при исполнении одним или более компьютерными процессорами побуждают упомянутый один или более компьютерных процессоров выполнять следующее:
прием объемных данных, полученных из трехмерной визуализации объема анатомической структуры в реальном времени при первой плотности пучка;
осуществление распознавания анатомической структуры для корректировки трехмерной анатомической модели согласно упомянутым объемным данным;
использование, автоматически и без необходимости вмешательства пользователя, скорректированной трехмерной модели для выбора одной или более частей упомянутой анатомической структуры для визуализации частей в реальном времени при второй плотности пучка, причем вторая плотность пучка больше первой плотности пучка;
инициирование, автоматически и без необходимости вмешательства пользователя, визуализации частей в реальном времени в отношении выбранных частей при второй плотности пучка;
избирательное прерывание, автоматически и без необходимости вмешательства пользователя, визуализации частей в реальном времени в отношении выбранных частей для повторного выполнения визуализации объема анатомической структуры в реальном времени при первой плотности пучка;
прием обновленных объемных данных, полученных из упомянутой повторно выполненной визуализации объема в реальном времени;
осуществление распознавания анатомической структуры для корректировки трехмерной анатомической модели согласно упомянутым обновленным объемным данным и
повторное инициирование, автоматически и без необходимости вмешательства пользователя, визуализации частей в реальном времени в отношении выбранных частей при второй плотности пучка.
| US 2005096538 A1, 05.05.2005 | |||
| Fredrik Orderuda et al | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ НАПОЛНЕНИЯ ФОРМ ПРИ ЦЕНТРОБЕЖНОЙ ОТЛИВКЕ ТРУБ И ДРУГИХ ПУСТОТЕЛЫХ ПРЕДМЕТОВ | 1926 |
|
SU7265A1 |
| Bahbibi Rahmatullah et al | |||
| Automated Selection of Standardized Planes from Ultrasound Volume, MACHINE LEARNING IN MEDICAL IMAGING, 18.09.2011, pp | |||
| Скоропечатный станок для печатания со стеклянных пластинок | 1922 |
|
SU35A1 |
| US 2011087094 A1, 14.04.2011 | |||
| СПОСОБ НЕИНВАЗИВНОЙ КЛИНИЧЕСКОЙ ПРИЖИЗНЕННОЙ ОЦЕНКИ СОСТОЯНИЯ ОРБИТАЛЬНОГО ИМПЛАНТАТА И ОКРУЖАЮЩИХ ЕГО ТКАНЕЙ | 2006 |
|
RU2309679C1 |

