ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к устройству формирования изображения, способу формирования изображения и компьютерной программе формирования изображения для формирования изображения объекта.
УРОВЕНЬ ТЕХНИКИ
В статье «Surgical needle reconstruction using small-angle multi-view X-ray» авторов С. Papalazarou et al, Proceedings of the 17th International Conference on Image Processing (ICIP), IEEE, September 2010, раскрыт способ для реконструирования хирургических игл с использованием формирования многоракурсного рентгеновского изображения при небольшом движении рамы C-типа. Объем движения ограничен угловым диапазоном меньше чем 30 градусов. Это небольшое движение обеспечивает достаточную многоракурсную информацию, которую используют в комбинации с моделью иглы для трехмерной реконструкции иглы. Этот способ позволяет реконструировать трехмерное изображение иглы, если игла остается статичной на различных видах. Однако если игла двигается, в частности, деформирована, в различных видах, трехмерное изображение иглы, имеющее хорошее качеством, не может быть надежно реконструировано.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Цель настоящего изобретения состоит в том, чтобы предоставить устройство формирования изображения, способ формирования изображения и компьютерную программу формирования изображения для формирования изображения объекта, которые позволяют надежно генерировать изображение хорошего качества, даже если объект движется, в частности, даже если объект деформирован.
В первом аспекте настоящего изобретения представлено устройство формирования изображения для формирования изображения объекта, где устройство формирования изображения содержит:
предоставляющий модель блок для предоставления кинематической модели робота, представляющего объект, где кинематическую модель определяют с помощью кинематических параметров,
предоставляющий проекционные данные блок для предоставления проекционных данных об объекте, которые соответствуют различным проекционным направлениям,
блок модификации моделей для модификации кинематической модели посредством модификации кинематических параметров так, что минимизируют различия между имитируемыми проекционными данными, которые определяют посредством имитации опережающей проекции кинематической модели, и предоставляемыми проекционными данными.
Поскольку объект представляют с помощью кинематической модели робота, движения объекта, в частности, деформации объекта, можно просто описать посредством относительно небольшого числа кинематических параметров. Следовательно, модель можно относительно быстро модифицировать посредством модификации небольшого числа кинематических параметров. Следовательно, за движениями объекта можно следить быстро, в частности, в реальном времени, посредством модификации небольшого числа кинематических параметров и, таким образом, кинематической модели так, что минимизируют различия между имитируемыми проекционными данными, которые определяют посредством имитации опережающей проекции, модифицированной кинематической модели, и предоставляемыми проекционными данными, где модифицированная кинематическая модель представляет изображение и может быть полностью или частично отображена, например, на дисплее. Следовательно, изображение объекта хорошего качества можно предоставлять, даже если объект двигается, в частности, даже если объект деформирован.
Кинематическая модель предпочтительно представляет собой модель робота с непрерывной траекторией движения. Робот может быть определен, например, как механическая модель манипулятора, содержащего набор тел, называемых звеньями, в цепи A, соединенных сочленениями. Каждое сочленение может иметь одну степень свободы - или поступательную, или вращательную. Для робота с n сочленениями, пронумерованными от 1 до n, может быть n+1 звеньев, пронумерованных от 0 до n. Робот с непрерывной траекторией движения предпочтительно представляет собой робота, который может плавно изгибаться по всей своей длине, где переходы между звеньями непрерывны и не резки. Такой робот с непрерывной траекторией движения объекта можно описать в терминах кинематической модели.
Кинематическая модель представляет собой модель робота, которую можно использовать для описания кинематики робота, в частности, деформации робота, посредством определения кинематических параметров. Кинематический параметр описывает, например, вращение или поступательное движение части кинематической модели объекта по отношению к другой части кинематической модели объекта.
Объект предпочтительно представляет собой катетер, в частности двунаправленный катетер, который введен человеку или животному, где устройство для формирования изображения выполнено с возможностью предоставлять изображение катетера внутри человека или животного посредством предоставления модифицированной кинематической модели.
Предпочтительно, проекционные данные объекта соответствуют различным проекционным направлениям и получены с течением времени так, что если объект двигался, проекционные данные, которые соответствуют различным проекционным направлениям, соответствуют объекту в другом местоположении и/или в другом деформированном состоянии. За этим движением и/или деформацией объекта может следовать модификация небольшого числа кинематических параметров так, что минимизируют различия между имитируемыми проекционными данными, которые определяют посредством имитации опережающей проекции кинематической модели, и предоставляемыми проекционными данными.
Предпочтительно предоставляющий проекционные данные блок выполнен с возможностью предоставлять проекционные данные, которые соответствуют колебанию проекционного направления. Поскольку предоставляющий проекционные данные блок предпочтительно выполнен с возможностью предоставлять проекционные данные, которые соответствуют колебаниям проекционного направления, и поскольку изображение объекта получают посредством генерации модифицированной кинематической модели, которую модифицируют, основываясь на предоставляемых проекционных данных, изображение объекта, т.е. трехмерное представление, можно генерировать, несмотря на то, что проекционные данные получены только для очень ограниченного углового диапазона, который может быть меньше 30 градусов. Следовательно, не обязательно получать проекционные данные в угловом диапазоне по меньшей мере в 180 градусов, как того требуют, например, способы компьютерной томографии.
Предоставляющий проекционные данные блок может представлять собой блок накопителя, в котором проекционные данные, которые соответствуют различным проекционным направлениям, уже хранят, или он может представлять собой блок захвата проекций для захвата проекционных данных в различных проекционных направлениях, т.е. для захвата различных видов. Блок захвата проекций предпочтительно содержит источник излучения для испускания излучения для прохождения через объект и блок обнаружения для обнаружения излучения после прохождения через объект и для генерации проекционных данных в зависимости от обнаруживаемого излучения. В частности, источник излучения представляет собой рентгеновский источник и блок обнаружения представляет собой рентгеновский детектор. Источник излучения и блок обнаружения могут быть установлены на раме C-типа. Однако также источники излучения других типов и соответствующие блоки обнаружения можно использовать для генерации проекционных данных. Например, источник излучения можно выполнить с возможностью испускать ядерное излучение, которое проходит через объект и которое обнаруживают посредством соответствующего блока обнаружения. Кроме того, источник излучения и блок обнаружения также могут быть установлены на другом устройстве, не представляющем собой раму C-типа.
Предоставляемые проекционные данные, которые соответствуют колебаниям проекционного направления, предпочтительно получены посредством использования источника излучения и блока обнаружения. Колебание предпочтительно осуществляют посредством вращения источника излучения и блока обнаружения вокруг оси вращения так, что воображаемая ось, соединяющая источник излучения и блок обнаружения, очерчивает поверхность воображаемого конуса. Воображаемый конус имеет свою вершину предпочтительно в изоцентре вращения, где изоцентр представляет собой точку, которую воображаемая ось пересекает всегда, независимо от вращательного движения источника излучения и блока обнаружения, которые могут быть установлены на одном и том же портале. Основание конуса в целом может иметь любую плоскую форму. Предпочтительно оно представляет собой замкнутую кривую, и оно может представлять собой гладкую кривую. Замкнутая кривая имеет такое преимущество, что легко сделать движение периодическим. Замкнутая кривая представляет собой, например, окружность или эллипс. Гладкая кривая имеет такое преимущество, что легче управлять движением и сделать захват более стабильным и менее шумным. Альтернативно, основание кривой образует линейную форму, и в этом случае источник излучения и блок обнаружения могут двигаться линейно и предпочтительно повторно между двумя конечными положениями. Проекционные данные, т.е. серию двумерных проекционных изображений, предпочтительно получают во время колебательного движения источника излучения и блока обнаружения.
Предпочтительно, чтобы проекционные данные представляли проекции, генерируемые посредством использования блока захвата проекций, где калибровку блока захвата проекций определяют посредством параметров калибровки, и где блок модификации моделей выполнен с возможностью модифицировать параметры калибровки и кинематические параметры так, что минимизируют различия между имитируемыми проекционными данными, которые определяют посредством имитации опережающей проекции модели, и предоставляемыми проекционными данными. Параметры калибровки предпочтительно определяют, какое значение проекционных данных, обнаруживаемое посредством блока обнаружения, соответствует определенному направлению пучка, т.е. соответствует определенному направлению, вдоль которого прошел пучок, который столкнулся с блоком обнаружения в соответствующем местоположении обнаружения, в котором обнаружено соответствующее значение проекционных данных. Следовательно, параметры калибровки предпочтительно описывают геометрию проекции. Параметры калибровки могут представлять собой, например, внутренние параметры калибровки или внешние параметры калибровки. Внутренние параметры калибровки представляют собой, например, те, что связаны с самим блоком обнаружения, такие как размер пикселя детектора, тогда как внешние параметры представляют собой те, которые связаны с положением блока обнаружения и источника излучения в окружающей обстановке, в частности, вращательное и поступательное положение блока обнаружения и источника излучения. Поскольку блок модификации моделей можно выполнить с возможностью так модифицировать один или несколько параметров калибровки, в дополнение к модификации кинематических параметров, чтобы минимизировать различие между имитируемыми проекционными данными, которые определяют посредством имитации опережающей проекции модели, и предоставляемыми проекционными данными, модель можно модифицировать, чтобы повторять движение объекта, в частности, чтобы повторять деформацию объекта. Следовательно, можно предоставить изображение хорошего качества, т.е. трехмерное представление объекта, даже если один или несколько параметров калибровки не надежны.
В дополнительном предпочтительном варианте осуществления параметры калибровки не модифицируют, в частности, кинематическую модель модифицируют только посредством модификации кинематических параметров. Следовательно, параметры калибровки можно рассматривать как известные и фиксированные, т.е. геометрию проекции можно считать известной. Блоки захвата проекций, такие как рентгеновская рама C-типа, обычно калибруются регулярно и в принципе разрабатываются так, чтобы они были хорошо воспроизводимыми, тем самым, делая внутренние и внешние параметры надежными. Таким образом, если параметры калибровки можно считать известными и фиксированными, кинематическую модель можно модифицировать посредством модификации кинематических параметров, без модификации параметров калибровки, тем самым уменьшая пространство параметров и позволяя модифицировать модель быстрее и, в частности, более точно.
Кроме того, предпочтительно, чтобы кинематическая модель содержала серию жестких звеньев, соединенных посредством сочленений, где каждое сочленение описывает или трехмерное вращение вокруг оси или поступательное движение вдоль оси. Следовательно, соответствующее сочленение представляет собой поворотное сочленение или призматическое сочленение. Следовательно, каждым сочленением можно управлять посредством угла вращения или расстояния поступательного движения. Кинематическую модель предпочтительно определяют с помощью последовательности этих сочленений. В одном из вариантов осуществления объект представляет собой катетер, и кинематическая модель моделирует катетер как последовательность сочленений и звеньев. Предоставляющий модель блок предпочтительно выполнен с возможностью представлять положение сочленения посредством четырех кинематических параметров в соглашении Денавита-Хартенберга (D-H). В частности, положение каждого сочленения представляют посредством четырех кинематических параметров в соглашении D-H. Положение предпочтительно определяет местоположение и ориентацию соответствующего сочленения. Соглашение D-H позволяет представлять кинематическую модель с минимальным набором параметров.
Предпочтительно, чтобы объект представлял собой катетер и кинематическая модель содержала семь сочленений, которые управляются тремя кинематическими параметрами, где блок модификации моделей выполнен с возможностью модифицировать модель посредством модификации трех кинематических параметров. Поскольку кинематическую модель можно модифицировать просто модификацией трех кинематических параметров, кинематическая модель может повторять движения и/или деформации катетера даже быстрее, тем самым дополнительно улучшая качество предоставления изображения двигающегося и/или деформирующегося катетера.
Кроме того, блок модификации моделей предпочтительно выполнен с возможностью
- определять двумерный след проекций объекта в предоставляемых проекционных данных,
- определять имитируемые проекционные данные так, что имитируемые проекционные данные определяют имитируемый двумерный след,
- модифицировать модель так, чтобы минимизировать различия между определяемым двумерным следом и имитируемым двумерным следом. Это различие между определяемым двумерным следом и имитируемым двумерным следом рассматривается в качестве различия между имитируемыми проекционными данными и предоставляемыми проекционными данными, которое минимизировано для модификации кинематической модели. Посредством модификации кинематической модели так, чтобы минимизировать различие между определяемым двумерным следом и имитируемым двумерным следом, качество адаптации модели к двигающемуся и/или деформирующемуся объекту можно дополнительно усовершенствовать.
Предпочтительно блок модификации моделей выполнен с возможностью
- реконструировать изображение объекта по определяемому двумерному следу в предоставляемых проекционных данных,
- располагать кинематическую модель так, чтобы по меньшей мере часть кинематической модели совпадала с соответствующей частью объекта, представленной на изображении,
- определять начальные кинематические параметры так, чтобы минимизировать различия между объектом, представленным на изображении, и моделью,
- модифицировать модель посредством модификации начальных кинематических параметров так, чтобы минимизировать различия между определяемым двумерным следом и имитируемым двумерным следом. Часть кинематической модели или вся кинематическая модель может быть расположена так, что часть или вся кинематическая модель совпадает с соответствующей частью или всего объекта, представленного на изображении. Предпочтительно, если объект представляет собой катетер, первая, в частности прямая, часть катетера, представленная на изображении, совпадает с соответствующей первой частью кинематической модели. Расположение кинематической модели так, что по меньшей мере часть кинематической модели совпадает с соответствующей частью объекта, представленного на изображении, предпочтительно включает вращение и/или поступательное движение модели. Реконструкция изображения объекта по определяемому двумерному следу в предоставляемых проекционных данных для предоставления изображения, которое можно использовать для процедуры расположения, предпочтительно не учитывает движение и/или деформацию объекта и, следовательно, может быть рассмотрена в качестве жесткой реконструкции. Эта жесткая реконструкция предпочтительно ведет к трехмерному изображению объекта, которое используется изначально для расположения кинематической модели так, что по меньшей мере часть кинематической модели совпадает с соответствующей частью объекта, представленного на трехмерном изображении. Процедура инициализации делает возможным более быстрое определение кинематических параметров, которые описывают фактическое местоположение и деформацию объекта.
Блок модификации моделей можно выполнить с возможностью определять один или несколько двумерных следов или проекций объекта в предоставляемых проекционных данных и чтобы определять имитируемые проекционные данные так, что имитируемые проекционные данные определяют один или несколько имитируемых двумерных следов. Соответственно, блок модификации моделей можно выполнить с возможностью реконструировать изображение для описанной выше процедуры расположения по одному или нескольким определяемым двумерным следам в предоставляемых проекционных данных и чтобы модифицировать модель так, чтобы минимизировать различие между определяемым одним или несколькими двумерными следами и имитируемым одним или несколькими двумерными следами.
Кроме того, предпочтительно, что объект представляет собой первый объект, вставленный во второй объект, где устройство формирования изображения содержит предоставляющий изображение блок для предоставления изображения второго объекта и дисплей для показа модифицированной модели с наложенным изображением второго объекта. Изображение второго объекта может представлять собой двух-, трех- или четырехмерное изображение. Изображение второго объекта представлять собой рентгеноскопическое изображение. Предпочтительно выполнить дисплей с возможностью показывать трехмерное местоположение первого объекта в зависимости от модифицированной модели. Например, модель можно представить в трехмерном виде на дисплее, в частности, можно использовать цветовое кодирование и/или полутона для генерации впечатления трехмерности модели. Первый объект предпочтительно представляет собой катетер, вставленный человеку или животному, представляющему собой второй объект. Посредством наложения изображения второго объекта на модифицированную модель можно получить изображение местоположения первого объекта внутри второго объекта, в частности, положение по глубине.
Предоставляющий изображение блок предпочтительно представляет собой указанный выше блок захвата проекций для захвата, например, двумерных рентгеноскопических изображений. Однако предоставляющий изображение блок также может представлять собой другой блок для предоставления другого изображения второго объекта, такой как блок компьютерной томографии, блок магнитно-резонансного формирования изображения, блок радионуклидного формирования изображения, такой как блок однофотонной эмиссионной компьютерной томографии или блок позитронно-эмиссионной томографии, блок ультразвуковой формирования изображения или другую модальность формирования изображения.
Кроме того, предпочтительно, что предоставляющий модель блок выполнен с возможностью хранить несколько моделей, соответствующих нескольким объектам и предоставлять модель из нескольких моделей, которая соответствует визуализируемому объекту. Пользовательский интерфейс может быть предоставлен для того, чтобы позволять человеку выбирать модель, которая соответствует текущему визуализируемому объекту. Предоставляющий модель блок также можно выполнить с возможностью автоматически обнаруживать текущий объект и предоставлять соответствующую хранимую модель. Например, жесткую реконструкцию можно осуществлять, основываясь на проекционных данных, получаемых в различных проекционных направлениях, т.е. можно реконструировать трехмерное изображение объекта, где допускается, что объект не перемещается и не деформируется, и трехмерное изображение можно сравнивать с хранимыми моделями, чтобы автоматически выбирать модель, которая соответствует объекту. В другом варианте осуществления двумерное проекционное изображение, в частности, двумерное рентгеноскопическое изображение, можно сравнивать с имитируемыми проекциями хранимых моделей, чтобы автоматически выбирать модель, которая соответствует объекту.
В дополнительном аспекте настоящего изобретения представлен способ формирования изображения для формирования изображения объекта, где способ формирования изображения включает:
предоставление кинематической модели робота, представляющего объект, где кинематическую модель определяют с помощью кинематических параметров,
предоставление проекционных данных объекта, которые соответствуют различным проекционным направлениям,
модификацию модели посредством модификации кинематических параметров так, что минимизируются различия между имитируемыми проекционными данными, которые определяются посредством имитации опережающей проекции модели, и предоставляемыми проекционными данными.
В другом аспекте настоящего изобретения представлена компьютерная программа формирования изображения для формирования изображения объекта, причем компьютерная программа формирования изображения содержит средства программного кода для управления устройством формирования изображения, как определено в п.1, для осуществления этапов способа формирования изображения, как определено в п.11, когда компьютерную программу формирования изображения запускают на компьютере, управляющем устройством формирования изображения.
Следует понимать, что устройство формирования изображения по п.1, способ формирования изображения по п.11 и компьютерная программа формирования изображения по п.12 имеют схожие и/или идентичные предпочтительные варианты осуществления, как определено в зависимых пунктах формулы изобретения.
Следует понимать, что предпочтительный вариант осуществления изобретения также может представлять собой какую-либо комбинацию зависимых пунктов формулы изобретения с соответствующим независимым пунктом формулы изобретения.
Эти и другие аспекты изобретения явно следуют из вариантов осуществления, описанных в настоящем документе далее, и разъяснены со ссылкой на них.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На фиг.1 представлен схематично и для примера вариант осуществления устройства формирования изображения для формирования изображения объекта,
на фиг.2 представлено схематично и для примера представление кинематической модели робота, представляющего объект,
на фиг.3 представлена для примера таблица кинематических параметров кинематической модели, и
на фиг.4 представлена блок-схема, которая для примера иллюстрирует вариант осуществления способа формирования изображения для формирования изображения объекта.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
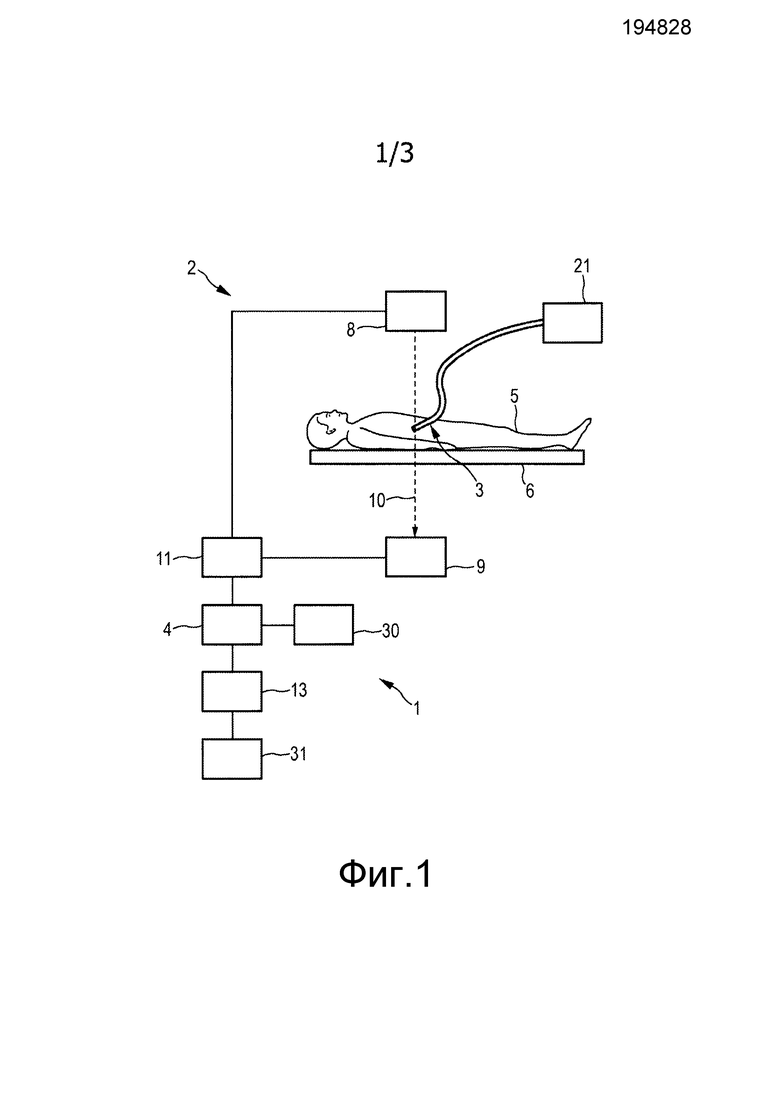
На фиг.1 представлен схематично и для примера вариант осуществления устройства формирования изображения для формирования изображения объекта. Устройство формирования изображения 1 содержит предоставляющий проекционные данные блок 2 для предоставления проекционных данных об объекте 3, которые соответствуют различным проекционным направлениям. Устройство формирования изображения 1 дополнительно содержит предоставляющий модель блок 4 для предоставления кинематической модели робота, представляющего объект 3, где кинематическую модель определяют с помощью кинематических параметров, и блок модификации моделей 13 для модификации кинематической модели посредством модификации кинематических параметров так, что минимизируются различия между имитируемыми проекционными данными, которые определяются посредством имитации опережающей проекции кинематической модели, и предоставляемыми проекционными данными. Устройство для формирования изображения 1 дополнительно содержит дисплей 31 для отображения изображения модифицированной модели.
Предоставляющий проекционные данные блок 2 предпочтительно представляет собой блок захвата проекций, содержащий источник излучения 8 для испускания излучения 10 для прохождения через объект 3, и блок обнаружения 9 для обнаружения излучения после прохождения через объект 3 и генерации проекционных данных в зависимости от обнаруживаемого излучения. В частности, источник излучения 8 представляет собой рентгеновский источник, и блок обнаружения 9 представляет собой рентгеновский детектор. Источник излучения 8 и блок обнаружения 9 могут быть установлены на раме C-типа, угловую ориентацию которых по отношению к объекту 3 можно модифицировать, чтобы получать проекционные данные объекта 3, которые соответствуют различным проекционным направлениям. Блок захвата проекций дополнительно содержит блок управления захватом 11 для управления захватом проекционных данных, в частности, для управления движением источника излучения 8 и блока обнаружения 9 по отношению к объекту 3. Рама C-типа представляет собой хорошо известное подвижное устройство, где на концах рамы C-типа предпочтительно устанавливают источник излучения 8 и блок обнаружения 9. Раму C-типа можно выполнить с возможностью вращения вокруг одной или нескольких осей вращения. Это вращение можно осуществлять с помощью рук или с помощью одного или нескольких двигателей, которыми можно управлять посредством блока управления захватом 11. В этом варианте осуществления блок управления захватом 11 управляет источником излучения 8 и блоком обнаружения 9, в частности, рамой C-типа, на которой устанавливают источник излучения 8 и блок обнаружения 9 так, что источник излучения 8 и блок обнаружения 9 осуществляют колебательное движение, которое соответствует колебанию проекционного направления. Колебание предпочтительно осуществляют посредством вращения источника излучения 8 и блока обнаружения 9 вокруг оси вращения так, что воображаемая ось, соединяющая источник излучения 8 и блок обнаружения 9, очерчивает поверхность воображаемого конуса. Воображаемый конус имеет свою вершину предпочтительно в изоцентре вращения. Основание конуса предпочтительно имеет круглую или эллиптическую плоскую форму. Проекционные данные, т.е. серию двумерных проекционных изображений, получают во время колебательного движения источника излучения 8 и блока обнаружения 9.
В этом варианте осуществления объект 3 представляет собой катетер 3, вставленный человеку 5, который расположен на столе 6. Катетером 3 управляют посредством блока управления катетером 21. Катетер 3 может представлять собой какой-либо катетер, который можно использовать в оперативных процедурах, например такой, как абляционный катетер для осуществления процедур абляции в сердце человека 5. Блок управления катетером 21 предпочтительно выполнен с возможностью позволять пользователю, такому как врач, управлять катетером 3, в частности, перемещать катетер 3 внутрь и внутри человека 5 и деформировать катетер 3. Например, катетер 3 может содержать вытяжные проволоки, которыми можно управлять посредством блока управления катетером 21 известным образом, чтобы перемещать и, в частности, деформировать катетер 3.
Предоставляющий модель блок 4 предпочтительно выполнен с возможностью предоставлять кинематическую модель робота, который является роботом с непрерывной траекторией движения. Такая кинематическая модель схематически и для примера представлена звеньями и сочленениями, показанными на Фиг.2.
Кинематическая модель 12 содержит серию жестких звеньев, соединенных сочленениями 14...20, где каждое сочленение описывает или трехмерное вращение вокруг оси или поступательное движение вдоль оси. Следовательно, соответствующее сочленение представляет собой или поворотное сочленение 15, 16, 18, 19 или призматическое сочленение 14, 17, 20. Следовательно, каждым сочленением можно управлять посредством угла вращения θ2, θ3, θ5, θ6 и расстояния поступательного движения d1, d4, d7. Кинематическую модель 12 определяют с помощью последовательности этих сочленений. В частности, катетер 3, который предпочтительно представляет собой двунаправленный катетер, моделируют посредством кинематической модели 12 в виде последовательности сочленений и звеньев.
На Фиг.2 представлено восемь звеньев O0...O7, которые соединены посредством каждого из сочленений 14...20 соответственно. В этом варианте осуществления для примера последовательность сочленений и звеньев можно описать следующим образом. Звено O0 соединено со звеном O1, посредством призматического сочленения 14 с кинематическим параметром d1. Звено O1 соединено с O2 посредством поворотного сочленения 15 с кинематическим параметром θ2, где O2 совпадает с O1. Звено O2 соединено со звеном O3 посредством поворотного сочленения 16 с кинематическим параметром θ3, где O3 совпадет с O2. Кроме того, звено O3 соединено со звеном O4 посредством призматического сочленения 17 с кинематическим параметром d4, и звено O4 соединено со звеном O5 посредством поворотного сочленения 18 с кинематическим параметром θ5, где O5 совпадает с O4. Звено O5 соединено со звеном O6 посредством поворотного сочленения 19 с кинематическим параметром θ6, где О6 совпадает с O5, и звено O6 соединено со звеном O7 посредством призматического сочленения 20 с кинематическим параметром d7.
Кинематическая модель дополнительно содержит круговую дугу, которая не показана на Фиг.2, определяемую посредством длины хорды d4 между звеньями O4 и O5.
Каждое сочленение имеет свою собственную локальную систему координат Xi Yi, Zi, определяемую согласно соглашению D-H по отношению к системе координат предыдущего сочленения так, что i) ось z направлена в сторону оси сочленения; и ii) ось x параллельна общей нормали. Если однозначно определяемая общая нормаль отсутствует, то D-H параметр d представляет собой свободный параметр, и направление оси x текущей ординатной системы указывает от z-положения предыдущей оси z в соответствующее z-положение текущей оси z. Ось y следует из оси x и z посредством выбора ее так, чтобы составить правостороннюю систему координат. Каждая система координат, таким образом, связана со следующим сочленением, т.е. Xi, Yi, Zi, с центром в Oi связано с сочленением i+1. В частности, O0 представляет собой координатный центр, т.е. нулевую точку для призматического сочленения с параметром d1, O1 связано с θ2, O2 связано с θ3, и так далее.
Следует отметить, что на Фиг.2 не показана вся кинематическая модель 12, а только схематичное представление, в котором выделены сочленения 14...20 и звенья O0...O7.
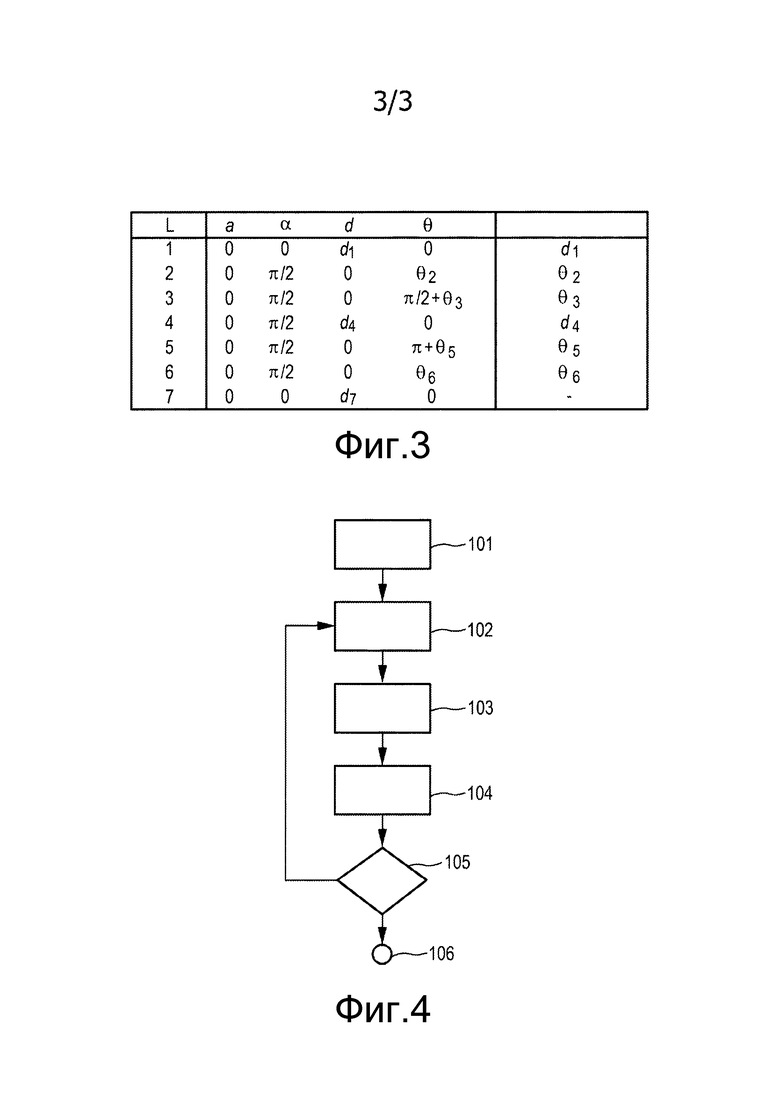
Кинематическая модель 12 моделирует кинематику управляемого двунаправленного катетера 3, в частности, свойства при сгибании катетера 3, как регулируется посредством вытяжных проволок, которые расположены внутри катетера 3 и которыми можно управлять через блок управления катетером 21. Кинематическую модель 12 определяют посредством последовательности сочленений, которые можно представлять с помощью TRRTRRT, где T обозначает поступательное движение, а R обозначает вращение. Кинематическая модель 12 содержит три секции. Виртуальное основание 22 дистального ствола катетера 3, представленное посредством призматического сочленения 14, гнущаяся секция 23 дистального ствола катетера 3, представленная посредством двух вращений, в частности кручения и отклонения, за чем следует поступательное движение и два дополнительных вращения, и дистальный конец 24 катетера 3, который имеет фиксированную длину и является почти жестким. Дистальный конец также представляют посредством призматического сочленения с фиксированным поступательным движением. Соответствующее положение каждого сочленения предпочтительно представляют посредством четырех кинематических параметров в соглашении D-H, которые схематично и для примера показаны на Фиг.3. На Фиг.3 первая колонка, обозначенная «L», обозначает различные звенья.
На Фиг.2, как уже указанно выше, звенья концептуально представлены с помощью точек O0...O7. Кинематические параметры из таблицы, представленной на Фиг.3, описывают преобразование между локальной системой координат одного звена в локальную систему координат предыдущего звена, где она начинается в O0. В частности, кинематические параметры, т.е. в этом варианте осуществления D-H параметры, имеют следующие значения: d обозначает смещение вдоль предыдущей оси z по отношению к общей нормали; θ обозначает угол вокруг предыдущей ось z от старой оси x до новой оси x; a обозначает длину общей нормали, допуская поворотное сочленение, которая представляет собой радиус вокруг предыдущей оси z; и α представляет собой угол вокруг общей нормаль от предыдущей оси z к текущей оси z. Дополнительные подробности, касающиеся D-H параметров, см. в «Robotics - Modelling, Planning and Control» B. Siciliano et al., стр. 58-65, Springer Verlag London, 2009.
Следовательно, положение каждого сочленения и, таким образом, конфигурацию кинематической модели можно описать посредством D-H параметров.
Предполагается, что ввиду механизма вытяжных проволок отклонение катетера 3 происходит в плоскости, т.е. что катетер 3 изгибается с нулевым кручением и что сгибание происходит при постоянной кривизне так, что дистальный ствол принимает форму круговой дуги. В силу этого допущения вторая пара вращений в гнущейся секции 23 сопряжена с первыми двумя вращениями. Дополнительно, поскольку общая длина дуги гнущейся секции 23 фиксирована, длина призматического сочленения между двумя парами вращений полностью управляется углом отклонения θ3. Из этого следует, что общее число свободных кинематических параметров для кинематической модели 12 равно трем. Следовательно, блок модификации моделей 13 предпочтительно выполнен с возможностью модифицировать кинематическую модель 12 посредством модификации трех свободных кинематических параметров d1, θ2, θ3.
В частности, блок модификации моделей 13 выполнен с возможностью определять двумерные следы проекций катетера 3 в предоставляемых проекционных данных. Поскольку источник излучения 8 и блок обнаружения 9 осуществляют колебательное движение в то время, как получают проекционные данные, проекция катетера 3 двигается вдоль двумерных следов. Двумерные следы можно определять посредством сегментации проекции катетера 3 в проекционных данных, которые представляют собой двумерные проекционные изображения. Для сегментации проекции катетера 3 в двумерном проекционном изображении можно использовать известные способы сегментации, такие как наращивание областей, задание порога и так далее. После сегментации проекции катетера 3 на двумерных проекционных изображениях положения сегментированной проекции катетера 3 можно определять, основываясь на геометрии проекции на каждом из двумерных проекционных изображений, где определяемые положения проекции катетера 3 на двумерных проекционных изображениях определяют двумерные следы. Блок модификации моделей 13 дополнительно выполнен с возможностью реконструировать трехмерное изображение катетера 3 по определяемым двумерным следам. Другими словами, проекционные данные, которые соответствуют различным проекционным направлениям, можно использовать для реконструирования трехмерного изображения катетера. Например, можно просто осуществлять обратную проекцию проекционных данных, чтобы реконструировать трехмерное изображение, используя определяемые двумерные следы и известную геометрию проекции. Трехмерное изображение имеет сниженное качество, поскольку проекционные данные получены только для относительно малого углового диапазона, но сниженного качества достаточно для выравнивания кинематической модели. Блок модификации моделей 13 дополнительно выполнен с возможностью затем располагать кинематическую модель 12 так, что по меньшей мере часть кинематической модели совпадает с соответствующей частью катетера 3, представляемой на реконструированном трехмерном изображении, которое реконструируется, как если бы катетер 3 был неподвижным, т.е. реконструируется жестким. В частности, блок модификации моделей 13 выполнен с возможностью вычислять трехмерное преобразование, которое предпочтительно включает вращение и поступательное движение, чтобы совмещать первую часть катетера 3, которая предпочтительно является по существу прямой, с соответствующей первой частью кинематической модели 12 между O0 и O1 на Фиг.2. Таким образом, кинематическую модель 12 катетера 3 вращают и двигают поступательно, чтобы совместить с жесткой реконструкцией. Изначально, по соглашению, первую часть кинематической модели предпочтительно помещают параллельно оси z системы координат в O0.
Блок модификации моделей 13 дополнительно выполнен с возможностью определять начальные кинематические параметры так, что минимизируют различия между катетером 3, представленным на трехмерном изображении, и кинематической моделью 12, содержащей круговую дугу, определяемую с помощью длины хорды d4. Таким образом, общая ориентация и положение кинематической модели 12 определяются посредством трехмерного преобразования так, что кинематическая модель 12 совпадает с реконструированным трехмерным изображением объекта настолько хорошо, насколько возможно, и затем модифицируются кинематические параметры, чтобы модифицировать форму или деформацию кинематической модели 12, так что минимизируются различия между катетером 3, представленным на трехмерном изображении, и кинематической моделью 12, тем самым определяя начальные кинематические параметры. В этом варианте осуществления начальные кинематические параметры представляют собой параметры в D-H соглашении, где каждое сочленение характеризуется четырьмя кинематическими параметрами. Эти начальные кинематические параметры, которые лучше всего объясняют жесткую реконструкцию, предпочтительно определяются посредством использования обратной кинематики. Обратная кинематика представляет собой известный способ формирования параметров моделей роботов при заданных трехмерном положении или трехмерной форме объекта. Положение предпочтительно обозначает трехмерное положение и ориентацию каждого из звеньев, составляющих объект. В этом варианте осуществления начальные кинематические параметры определяют посредством решения следующей нелинейной задачи оптимизации:

В уравнении (1) верхний индекс R указывает на то, что во время решения нелинейной задачи в соответствии с уравнением (1) допускается, что объект является жестким. Трехмерное реконструированное изображение объекта, которое основано на измеренных двумерных следах (треках), обозначается как  , где j обозначает различные точки выборок или воксели объекта, показанные на трехмерном изображении. В частности, обозначает трехмерное положение точки выборки, обозначенной j. Переменная N обозначает число точек измерений или вокселей трехмерной реконструкции объекта, и
, где j обозначает различные точки выборок или воксели объекта, показанные на трехмерном изображении. В частности, обозначает трехмерное положение точки выборки, обозначенной j. Переменная N обозначает число точек измерений или вокселей трехмерной реконструкции объекта, и  обозначает трехмерную модель в соответствующем положении как функцию кинематических параметров pR. Предпочтительно, модель, содержащая круговую дугу, определяемую длиной хорды d4, дискретизируется с помощью N точек измерений вдоль длины модели, представляющей катетер, в частности, от O0 или O1 до O7, где интервалы дискретизации могут быть эквидистантными. Конечно, дискретизацию осуществляют аналогичным образом в отношении реконструируемого объекта, чтобы позволить решить уравнение (1).
обозначает трехмерную модель в соответствующем положении как функцию кинематических параметров pR. Предпочтительно, модель, содержащая круговую дугу, определяемую длиной хорды d4, дискретизируется с помощью N точек измерений вдоль длины модели, представляющей катетер, в частности, от O0 или O1 до O7, где интервалы дискретизации могут быть эквидистантными. Конечно, дискретизацию осуществляют аналогичным образом в отношении реконструируемого объекта, чтобы позволить решить уравнение (1).
Блок модификации моделей 13 может быть выполнен с возможностью решать нелинейную задачу оптимизации в соответствии с уравнением (1) посредством использования свободного обратного кинематического решателя, как опубликовано, например, в статье «A Robotics Toolbox for MATLAB» P. I. Corke, IEEE Robotics and Automation Magazine, Vol. 3, pp. 24-32, March 1996.
Решение нелинейной задачи оптимизации в соответствии с уравнением (1) дает начальные кинематические параметры, которые являются результатом жесткой реконструкции катетера 3. Следовательно, инициализация состоит из, во-первых, выполнения жесткой реконструкции катетера 3 посредством использования определяемых двумерных следов, где жесткая реконструкция, т.е. жестко реконструированное изображение катетера 3, представляет правильное решение, если объект не перемещался. Из этой жесткой реконструкции начальные кинематические параметры получают с использованием обратной кинематики, т.е., например, посредством решения нелинейной задачи оптимизации в соответствии с уравнением (1).
Поскольку во время инициализации кинематическая модель 12 расположена так, что по меньшей мере часть кинематической модели совпадает с соответствующей частью объекта, представленной на изображении, в частности, поскольку кинематическая модель 12 расположена так, что первая часть 22 кинематической модели совпадает с соответствующей первой прямой частью катетера 3, общее положение и ориентация кинематической модели 12 уже совмещены с катетером 3. Для того чтобы описать деформацию катетера 3, нужно модифицировать только указанные выше три свободные кинематические параметра d1, θ2, θ3. Изначально, эти свободные кинематические параметры определяют посредством решения нелинейной задачи оптимизации в соответствии с уравнением (1), чтобы определить начальные кинематические параметры. Кинематические параметры d1, θ2, θ3 представляют собой только свободные кинематические параметры двунаправленного катетера 3, поскольку a) θ5 связан с θ3, и θ6 связан с θ2, b) d4 представляет собой известную функцию θ3 и L представляет собой фиксированную длину дистального ствола двунаправленного катетера 3, и c) d7 фиксирована и известна для катетера 3.
Блок модификации моделей 13 дополнительно выполнен с возможностью определять имитируемые проекционные данные так, что имитируемые проекционные данные определяют имитируемые двумерные следы посредством опережающего проецирования кинематической модели 12, содержащей круговую дугу, определяемую длиной хорды d4, и чтобы модифицировать начальные кинематические параметры, в частности, три свободных начальных кинематических параметра d1, θ2, θ3 так, что минимизируется различие между определяемыми двумерными следами, которые определены по измеренным проекционным данным, т.е. по полученным двумерным изображениям, и имитируемыми двумерными следами. Таким образом, минимизируют ошибку повторного проецирования, чтобы определять оптимизированные кинематические параметры, которые описывают для каждого проекционного направления, т.е. для каждой точки во времени или координатах, деформацию катетера 3. Ошибку повторного проецирования предпочтительно минимизируют посредством решения задачи оптимизации в соответствии со следующим уравнением:

где

В уравнении (2) p обозначает получаемые оптимизированные кинематические параметры d1, θ2, θ3, F обозначает число систем координат, т.е. число получаемых проекций, где i=1...F, и xij обозначает отслеживаемые точки, т.е. двумерные положения отслеживаемых точек. Соответствующие имитированные значения обозначают как  . В уравнении (3)
. В уравнении (3)  представляет собой N-мерный вектор, содержащий значения , Pi обозначает матрицу опережающей проекции для системы координат, обозначаемой i, и Si(pi) обозначает трехмерную форму, т.е. положение кинематической модели, как функцию кинематических параметров
представляет собой N-мерный вектор, содержащий значения , Pi обозначает матрицу опережающей проекции для системы координат, обозначаемой i, и Si(pi) обозначает трехмерную форму, т.е. положение кинематической модели, как функцию кинематических параметров  для соответствующей системы координат, обозначаемой посредством i. В частности, для каждой точки измерений, которую обозначают посредством j, кинематической модели с трехмерной формой Si(pi) и для каждой проекции, которую обозначают посредством i, одно положение имитируемого следа
для соответствующей системы координат, обозначаемой посредством i. В частности, для каждой точки измерений, которую обозначают посредством j, кинематической модели с трехмерной формой Si(pi) и для каждой проекции, которую обозначают посредством i, одно положение имитируемого следа  определяют посредством использования матрицы опережающей проекции Pi. Двумерные следы, определяемые по измеренным проекциям, дискретизируются в соответствии с дискретизацией значений положений имитированных следов , чтобы позволить использовать уравнение (2).
определяют посредством использования матрицы опережающей проекции Pi. Двумерные следы, определяемые по измеренным проекциям, дискретизируются в соответствии с дискретизацией значений положений имитированных следов , чтобы позволить использовать уравнение (2).
Блок модификации моделей можно выполнить с возможностью осуществлять вычисления по меньшей мере в соответствии с уравнениями (2) и (3) в гомогенных координатах, как определено, например, в книге «Multiple View Geometry in Computer Vision», Richard Hartley et al., стр.1-9, Cambridge University Press, 2004.
Блок модификации моделей 13 выполнен с возможностью решать задачу оптимизации в соответствии с уравнением (2), чтобы определять кинематические параметры d1, θ2, θ3 для текущей деформации катетера 3. Например, блок модификации моделей 13 можно выполнить с возможностью итеративно решать задачу оптимизации. Например, известный алгоритм Левенберга-Марквардта (LMA) можно использовать для решения задачи оптимизации. LMA осуществляет интерполяцию между алгоритмом Гаусса-Ньютона (GNA) и градиентным спуском. Также другие известные алгоритмы можно использовать для решения задачи оптимизации в соответствии с уравнением (2), т.е. для минимизации различий между имитируемыми проекционными данными и получаемыми проекционными данными. Например, градиентный спуск, алгоритм Гаусса-Ньютона, доверительной области, квадратического программирования и так далее можно использовать для определения кинематических параметров d1, θ2, θ3 в соответствии с уравнением (2).
Дисплей 31 выполнен с возможностью представлять модифицированную кинематическую модель 12 с наложенным изображением человека 5. В этом варианте осуществления блок захвата проекций 2 генерирует двумерные рентгеноскопические изображения, которые используют для модификации кинематической модели 12 в то время, как деформируют катетер 3, и которые отображают на дисплее 31 с наложенной модифицированной кинематической моделью 12. В частности, кинематическую модель 12 модифицируют в реальном времени в соответствии с деформацией катетера 3, и деформацию показывают в реальном времени на дисплее 31 посредством наложения изображения кинематической модели 12, которую модифицируют в реальном времени, с использованием двумерного рентгеноскопического изображения. Например, на дисплее 31 можно отображать трехмерное представление кинематической модели, в частности, можно использовать цветовое кодирование и/или полутона для создания трехмерного впечатления от кинематической модели. Цветовое кодирование также можно использовать для окрашивания модели в различные цвета в зависимости от соответствующих глубин, например, по отношению к расстоянию от соответствующей части модели до блока обнаружения. В одном из вариантов осуществления части модели, близко расположенные к блоку обнаружения, можно окрашивать первым цветом, например красным, и части модели, расположенные близко к источнику излучения, можно окрашивать вторым цветом, например синим, где части объекта между первым цветом и вторым цветом можно окрашивать в меняющиеся полутона в зависимости от соответствующего им расстояния до блока обнаружения и источника излучения. В другом варианте осуществления вместо наложения изображения двумерного рентгеноскопического изображения на модифицированную кинематическую модель, на изображение модифицированной кинематической модели также можно накладывать другое изображение человека 5, в частности, двух-, трех- или четырехмерное изображение человека 5. Изображение человека 5 может представлять собой изображение, которое получено с помощью другой модальности формирования изображения, такой как устройство компьютерной томографии, устройство магнитно-резонансной формирования изображения или устройство радионуклидной формирования изображения, например устройство однофотонной эмиссионной компьютерной томографии или устройство позитронно-эмиссионной томографии. В настоящем варианте осуществления изображение человека 5 предоставляют посредством блока захвата проекций 2, который, следовательно, можно рассматривать в качестве предоставляющего изображение блока. В другом варианте осуществления обеспечивающий получение изображения блок может представлять собой блок накопителя, в котором хранится уже полученное изображение человека 5.
Дисплей 31 может содержать двумерный или трехмерный экран.
Хотя в описанных выше вариантах осуществления блок модификации моделей выполнен с возможностью модифицировать только три свободных кинематических параметра d1, θ2, θ3, блок модификации моделей также можно выполнить с возможностью модифицировать больше чем три кинематических параметра и/или параметра калибровки. В частности, блок модификации моделей можно выполнить с возможностью модифицировать параметры калибровки и кинематические параметры так, чтобы минимизировать различия между имитируемыми проекционными данными, которые определяются посредством имитации опережающей проекции модели, и предоставляемыми проекционными данными. Параметры калибровки предпочтительно определяют, какое значение проекционных данных, обнаруживаемых посредством блока обнаружения, соответствует определенному направлению пучка, т.е. соответствует определенному направлению, вдоль которого прошел пучок, который столкнулся с блоком обнаружения в соответствующем местоположении обнаружения, в котором обнаружено соответствующее значение проекционных данных. Следовательно, параметры калибровки предпочтительно описывают геометрию проекции. Параметры калибровки могут представлять собой внутренние параметры калибровки или внешние параметры калибровки.
Предоставляющий модель блок 4 выполнен с возможностью хранить несколько моделей, соответствующих нескольким объектам, и предоставлять кинематическую модель из нескольких моделей, которая соответствует визуализируемому объекту. Таким образом, визуализируемый объект не должен обязательно быть описанным выше двунаправленным катетером. Визуализируемый объект также может представлять собой другой объект, такой как другой катетер, игла и так далее, где предоставляющий модель блок 4 предоставляет кинематическую модель, которая соответствует текущему визуализируемому объекту. В этом варианте осуществления пользовательский интерфейс 30 предоставляется для того, чтобы позволять пользователю выбирать модель, которая соответствует текущему объекту, подлежащему формирования изображения. Предоставляющий модель блок также может выполняться с возможностью автоматически обнаруживать текущий объект и предоставлять соответствующую хранимую модель. Например, можно осуществлять описанную выше жесткую реконструкцию трехмерного изображения объекта, в которой допускается, что объект не перемещается и не деформируется, и трехмерное изображение может сравниваться с хранимыми моделями, чтобы автоматически выбирать модель, которая соответствует объекту. В дополнительном варианте осуществления двумерное проекционное изображение, в частности двумерное рентгеноскопическое изображение, можно сравнивать с имитируемыми проекциями хранимых моделей, чтобы автоматически выбирать модель, которая соответствует объекту. Каждый объект можно предварительно моделировать, так что звенья и сочленения, кинематические параметры, в частности свободные кинематические параметры после расположения всей модели на основе жесткой реконструкции, и возможные диапазоны значений кинематических параметров являются предварительно определяемыми. Поскольку хирургические инструменты обычно хорошо описаны и могут быть получены предварительно, легко осуществлять автономные тесты в лаборатории для того, чтобы определять лучший состав для каждого применения, например, для катетерной абляции, протезирования клапана и так далее. Также для других объектов, не являющихся хирургическими инструментами, можно предварительно определять звенья и сочленения кинематической модели робота и соответствующие кинематические параметры.
Далее вариант осуществления способа формирования изображения для формирования изображения объекта для примера описан со ссылкой на блок-схему, представленную на Фиг.4.
На этапе 101 пользователь может выбирать кинематическую модель робота, представляющего объект, где кинематическую модель определяют с помощью кинематических параметров, посредством использования пользовательского интерфейса 30. Пользователь выбирает, например, описанную выше кинематическую модель двунаправленного катетера 3.
На этапе 102 предоставляют проекционные данные объекта, которые соответствуют различным проекционным направлениям. В этом варианте осуществления блок захвата проекций 2 получает проекционные данные, т.е. несколько двумерных проекционных изображений, в то время как источник излучения 8 и блок обнаружения 9 осуществляют колебательное движение, и объект, который в этом варианте осуществления представляет собой двунаправленный катетер 3, деформируется. На этапе 103 выбранную кинематическую модель 12 модифицируют посредством модификации кинематических параметров так, что минимизируются различия между имитируемыми проекционными данными, которые определяются посредством имитации опережающей проекции модели, и предоставляемыми проекционными данными. Предпочтительно, кинематические параметры инициализируют посредством осуществления жесткой реконструкции, основываясь на предоставляемых проекционных данных, которые представляют собой реконструкцию, которая не принимает во внимание деформацию объекта, как описано выше. На этапе 104 модифицированную кинематическую модель отображают на дисплее 31 с наложенными двумерными проекционными изображениями, которые предпочтительно формируют двумерное рентгеноскопическое изображение, получаемое посредством блока захвата проекций 2. На этапе 105 принимают решение о том, выполнен ли критерий прекращения или нет. Если критерий прекращения не выполнен, способ продолжается этапе 102, а если критерий прекращения выполнен, способ заканчивается на этапе 106. Критерий прекращения представляет собой, например, то, что человек может указать, например, посредством использования пользовательского интерфейса, что способ формирования изображения должен быть остановлен. Или критерий прекращения может быть выполнен, если время захвата превысило предварительно определяемый порог.
Интервенционная радиология предоставляет возможность минимально инвазивного диагностирования и лечения многих состояний в области кардиологии, неврологии и эндоваскулярной медицины, минимально инвазивные процедуры типично осуществляют под флуороскопическим рентгеновским контролем, чтобы содействовать в ориентировании хирургических инструментов в анатомических структурах. Для содействия вмешательству может быть полезным получить детальную информацию о трехмерном положении и ориентации хирургического инструмента при его наведении. Такие инструменты могут включать катетеры, иглы и так далее. Описанные выше устройство формирования изображения и способ формирования изображения можно использовать, чтобы создавать и отображать текущую трехмерную информацию о таких инструментах с использованием множества рентгеновских видов, создаваемых посредством захвата при колебании. Устройство формирования изображения и способ формирования изображения предпочтительно выполнены с возможностью осуществлять получение изображения объекта, в частности, получать информацию о глубине, определяющую положение по глубине внутри человека или животного, используя только данные текущего двумерного изображения, т.е. флуороскопические проекционные данные.
Хотя в описанных выше вариантах осуществления перемещают как источник излучения, так и блок обнаружения, например, посредством перемещения рамы C-типа, на которой они установлены, чтобы осуществлять колебательное движение, также возможно, что источник излучения перемещается по отношению к блоку обнаружения, или наоборот.
Хотя в описанных выше вариантах осуществления катетер описан как визуализируемый объект, вводимый в пациента, также можно получать изображение других объектов, которые могут вводиться, например, в технический объект, который не является человеком, или визуализируемый объект может вводиться в животное.
Для специалистов в данной области могут быть понятны и реализуемы другие модификации раскрытых вариантов осуществления при практическом осуществлении описываемого изобретения, на основе чертежей, раскрытия и приложенной формулы изобретения.
В формуле изобретения слово «содержит» не исключает другие элементы или этапы, а форма единственного числа не исключает множества.
Один блок или устройство может выполнять функции нескольких элементов, перечисленных в формуле изобретения. Сам факт того, что определенные меры перечислены во взаимно различных зависимых пунктах формулы изобретения, не исключает того, что комбинация этих мер не может быть использована с пользой.
Вычисления, такие как жесткая реконструкция, определение начальных кинематических параметров, модификация кинематических параметров и так далее, осуществляемые посредством одного или нескольких блоков или устройств, можно осуществлять посредством другого числа блоков или устройств. Вычисления и/или управление устройством формирования изображения в соответствии со способом формирования изображения можно реализовать в виде средств программного кода компьютерной программы и/или в виде специализированного аппаратного обеспечения.
Компьютерная программа может храниться/распространяться в подходящей среде, такой как оптическая запоминающая среда или твердотельная среда, поставляемая вместе с или в виде части других аппаратных средств, а также может распространяться в других формах, например, через интернет или другие проводные или беспроводные телекоммуникационные системы.
Любые ссылочные позиции в формуле изобретения не следует толковать в качестве ограничения объема.
Изобретение относится к устройству для формирования изображения для формирования изображения объекта, который предпочтительно представляет собой катетер. Предоставлена кинематическая модель робота, представляющего объект, который определяют с помощью кинематических параметров, и проекционные данные объекта, которые соответствуют различным проекционным направлениям. Кинематическую модель модифицируют посредством модификации кинематических параметров так, что минимизируются различия между имитируемыми проекционными данными, которые определяют посредством имитации опережающей проекции кинематической модели, и предоставляемыми проекционными данными. Поскольку объект представляется с помощью кинематической модели робота, движения объекта, в частности деформации объекта, можно описывать просто посредством небольшого числа кинематических параметров, тем самым позволяя модифицировать модель и, таким образом, быстро повторять движение объекта посредством модификации небольшого числа кинематических параметров, в частности, в реальном времени.

Устройство формирования изображения для формирования изображения катетера, вводимого в тело пациента, содержит блок представления кинематической модели робота, представляющего объект. Кинематическая модель робота определяется с помощью кинематических параметров. Кинематическая модель модифицируется посредством модификации кинематических параметров так, что минимизируются различия между имитируемыми проекционными данными и предоставляемыми проекционными данными. Технический результат заключается в улучшении качества изображения. 3 н. и 9 з.п. ф-лы, 4 ил.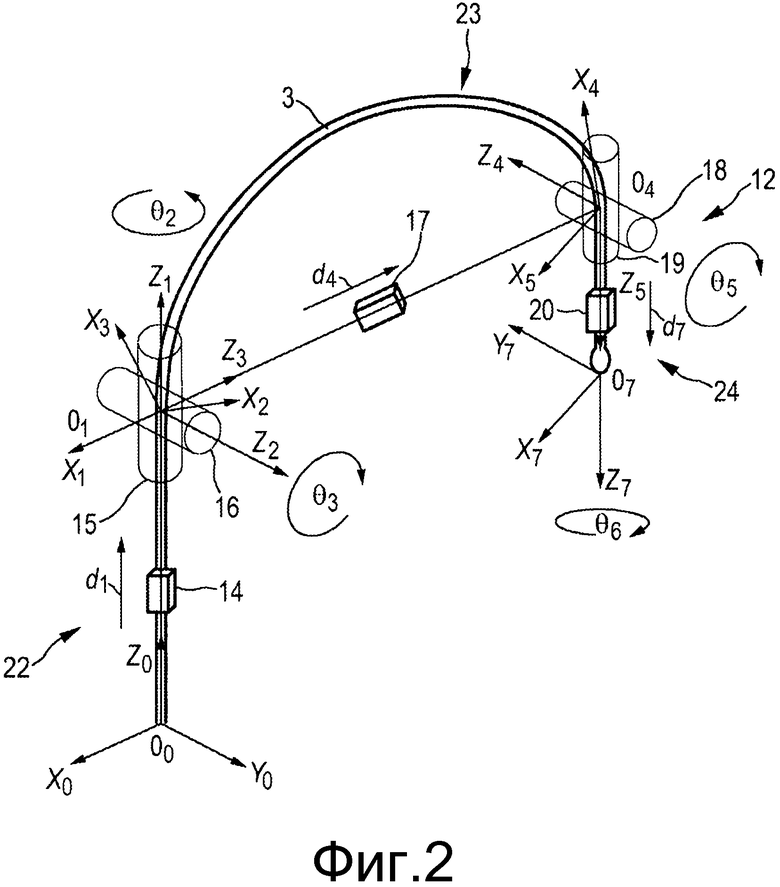
1. Устройство формирования изображения для формирования изображения объекта, причем устройство формирования изображения (1) содержит:
предоставляющий модель блок (4) для предоставления кинематической модели (12) робота, представляющего объект (3), причем кинематическая модель (12) определяется с помощью кинематических параметров,
предоставляющий проекционные данные блок (2) для предоставления проекционных данных об объекте (3), которые соответствуют различным проекционным направлениям,
блок модификации моделей (13) для модификации кинематической модели (12) посредством модификации кинематических параметров так, что минимизируются различия между имитируемыми проекционными данными, которые определяются посредством имитации опережающей проекции кинематической модели, и предоставляемыми проекционными данными.
2. Устройство формирования изображения по п.1, в котором предоставляющий проекционные данные блок (2) выполнен с возможностью предоставлять проекционные данные, которые соответствуют колебаниям проекционного направления.
3. Устройство формирования изображения по п.1, в котором проекционные данные представляют проекции, генерируемые посредством использования блока захвата проекций (2), причем калибровка блока захвата проекций (2) определяется с помощью параметров калибровки, и причем блок модификации моделей (13) выполнен с возможностью модифицировать параметры калибровки и кинематические параметры так, чтобы минимизировать различия между имитируемыми проекционными данными, которые определяются посредством имитации опережающей проекции модели, и предоставляемыми проекционными данными.
4. Устройство формирования изображения по п.1, в котором кинематическая модель (12) содержит серию жестких звеньев, соединенных сочленениями (14...20), где каждое сочленение описывает или трехмерное вращение вокруг оси или поступательное движение вдоль оси.
5. Устройство формирования изображения по п.1, в котором объект (3) представляет собой катетер, а кинематическая модель (12) содержит семь сочленений, которые управляются тремя кинематическими параметрами (d1, 



6. Устройство формирования изображения по п.1, в котором блок модификации моделей (13) выполнен с возможностью
определять двумерный след проекций объекта (3) в предоставляемых проекционных данных,
определять имитируемые проекционные данные так, что имитируемые проекционные данные определяют имитируемый двумерный след,
модифицировать модель, чтобы минимизировать различия между определяемым двумерным следом и имитируемым двумерным следом.
7. Устройство формирования изображения по п.6, в котором блок модификации моделей (13) выполнен с возможностью
реконструировать изображение объекта (3) по определяемым двумерным следам в предоставляемых проекционных данных,
располагать кинематическую модель так, что по меньшей мере часть кинематической модели совпадает с соответствующей частью объекта (3), представленной на изображении,
определять начальные кинематические параметры, чтобы минимизировать различия между объектом (3), представленным на изображении, и моделью (12),
модифицировать модель (12) посредством модификации начальных кинематических параметров, чтобы минимизировать различия между определяемым двумерным следом и имитируемым двумерным следом.
8. Устройство формирования изображения по п.1, в котором объект представляет собой первый объект (3), введенный во второй объект (5), причем устройство формирования изображения (1) содержит предоставляющий изображение блок для предоставления изображения второго объекта (5) и дисплей (31), чтобы показывать модифицированную модель с наложенным изображением второго объекта (5).
9. Устройство формирования изображения по п.8, в котором дисплей (31) выполнен с возможностью показывать трехмерное местоположение первого объекта (3) в зависимости от модифицированной модели (12).
10. Устройство формирования изображения по п.1, в котором предоставляющий модель блок (4) выполнен с возможностью хранить несколько моделей, соответствующих нескольким объектам, и предоставлять модель (12) из нескольких моделей, которые соответствуют объекту (3), подлежащему получению изображения.
11. Способ формирования изображения для формирования изображения объекта, причем способ формирования изображения включает в себя:
предоставление кинематической модели (12) робота, представляющего объект (3), причем кинематическую модель (12) определяют с помощью кинематических параметров,
предоставление проекционных данных объекта (3), которые соответствуют различным проекционным направлениям,
модификацию модели (12) посредством модификации кинематических параметров так, чтобы минимизировать различия между имитируемыми проекционными данными, которые определяют посредством имитации опережающей проекции модели, и предоставляемыми проекционными данными.
12. Запоминающая среда, имеющая средство программного кода, хранящееся в ней, для управления устройством формирования изображения по п.1, для осуществления этапов способа изображения по п.11, когда средство программного кода запускают на компьютере, управляющем устройством для формирования изображения.
| US 2008171936 A1, 17.07.2008 | |||
| US 2009012533 A1, 08.01.2009 | |||
| US 2009088897 A1, 02.04.2009 | |||
| US 2008243063 A1, 02.10.2008. |

