Область техники, к которой относится изобретение
Настоящее изобретение относится к определению конкретной ориентации объекта. В частности, настоящее изобретение относится к медицинской системе формирования изображений и способу действия медицинской системы формирования изображений, а также к элементу компьютерной программы для управления медицинской системой формирования изображений и к считываемому компьютером носителю данных, на котором хранится такой элемент компьютерной программы.
Уровень техники изобретения
Для определения положения объекта, расположенного в интересующей области, медицинские системы формирования изображений предоставляют пользователю данные двумерного изображения. Из документа WO 2006/114721 A2 известен способ, в котором инструмент обеспечен маркерами, видимыми на изображениях, получаемых системой формирования изображений. Из информации о местоположении маркеров на изображениях может быть выведена информация о местоположении инструмента. Но два маркера не предоставляют никакой информации о повороте.
Раскрытие изобретения
Как дополнительный недостаток, маркеры не обязательно дают пользователю прямую информацию о фактическом расположении объекта. В частности, в отношении асимметричных объектов, существует такая необходимость предоставлять пользователю информацию о соответствующем фактическом повороте.
Задачей настоящего изобретения является предоставление пользователю улучшенной информации о расположении объекта.
Задача настоящего изобретения решается совокупностью признаков независимых пунктов формулы изобретения, причем дополнительные варианты осуществления включены в зависимые пункты формулы изобретения.
Следует заметить, что последующие описанные аспекты изобретения применяются также для медицинской системы формирования изображений, способа, элемента программы и считываемого компьютером носителя данных.
В соответствии с аспектом изобретения, медицинская система формирования изображений содержит средство получения изображений, блок обработки данных и дисплей. Средство получения выполнено с возможностью получения данных двумерного изображения объекта, причем объект обеспечивают по меньшей мере тремя маркерами, видимыми в двумерном изображении. Блок обработки данных выполнен с возможностью обнаружения маркеров в двумерном изображении и идентификации пространственного расположения и угла поворота объекта относительно геометрии системы, основываясь на маркерах. Дисплей выполнен с возможностью отображения индикатора объекта, указывающего пространственное расположение и угол поворота объекта.
В соответствии с другим аспектом изобретения, обеспечивают способ действия медицинской системы формирования изображений, содержащий этапы, на которых: a) получают данные двумерного изображения объекта с помощью системы формирования изображений, причем объект обеспечивают по меньшей мере тремя маркерами, видимыми в двумерном изображении; b) обнаруживают маркеры в двумерном изображении; c) идентифицируют пространственное расположение и угол поворота объекта относительно геометрии системы, основываясь на маркерах; и d) отображают индикатор объекта, указывающий пространственное расположение и угол поворота объекта.
В пределах контекста настоящего изобретения термин "поворот" относится к повороту вокруг оси объекта. Термин "расположение" или положение относится к местоположению в пространстве, то есть, трехмерному местоположению или положению.
Индикатор объекта предоставляет прямую информацию, то есть, информацию, которая не нуждается ни в каких этапах декодирования или в пространственном воображении пользователя, так что пользователю предоставляется прямая информация, и он только лишь минимально отвлекается от других процедурных этапов. Таким образом, концентрация внимания пользователя дополнительно не рассеивается, так что пользователь может сосредоточиться на своих прямых задачах, что, например, в отношении хирургов в больнице, может быть предпочтительным.
В соответствии с другим аспектом изобретения, трехмерное изображение регистрируется с данными двумерного изображения, и индикатор объекта отображается вместе с данными изображения зарегистрированных трехмерных и двумерных изображений.
Это обеспечивает то преимущество, что пользователю предоставляется информация о пространственном расположении объекта относительно интересующих объема или области, окружающих объект. Другими словами, пространственная информация, содержащая как информацию о положении, так и информацию о повороте, предоставляется в улучшенном пространственном контексте посредством информации трехмерного изображения.
В соответствии с другим аспектом изобретения, перед этапом a) предварительно определяют требуемые пространственное расположение и угол поворота объекта и вычисляют конфигурацию маркеров для требуемого положения. Дополнительно, создают проекцию вычисленной конфигурации маркеров в соответствии с геометрией системы во время получения двумерного изображения на этапе a). Кроме того, созданную проекцию отображают в качестве целевого индикатора.
Это обеспечивает то преимущество, что созданная проекция обеспечивает визуальную информацию о расположении цели для объекта. Таким образом, пользователю обеспечивают информацию о взаимосвязи между фактическим положением объекта и целевым положением или об индексе или установочном положении. Например, в случае, когда пользователь пытается переместить объект в определенное место назначения или требуемое положение и с требуемым углом поворота, путем предоставления визуальной информации о фактическом положении и требуемом положении, пользователь может вывести из отображаемых изображений пространственную «дельту» или разность, так что пользователь может легко оценить необходимые дополнительные этапы перемещения для помещения объекта в требуемое положение.
В качестве сущности изобретения может рассматриваться определение пространственного расположения и угла поворота объекта и предоставление этой информации интуитивным способом пользователю, так чтобы пользователь не отвлекался от других задач, и таким образом облегчить пользователю понимание фактической пространственной ситуации в отношении интересующего объекта.
Эти и другие аспекты настоящего изобретения станут очевидны и будут подробно объяснены со ссылкой на варианты осуществления, описанные далее.
Краткое описание чертежей
Примеры вариантов осуществления изобретения будут описаны далее со ссылкой на следующие чертежи:
Фиг. 1 иллюстрирует медицинскую систему формирования изображений, соответствующую примеру варианта осуществления изобретения.
Фиг. 2 схематично иллюстрирует основные этапы способа действия медицинской системы формирования изображений, соответствующей примеру варианта осуществления изобретения.
Фиг. 3 представляет этапы способа, соответствующего другому примеру варианта осуществления изобретения.
Фиг. 4 представляет этапы способа, соответствующего другому примеру варианта осуществления изобретения.
Фиг. 5 представляет дополнительный пример варианта осуществления способа, соответствующего изобретению.
Фиг. 6 представляет дополнительный пример варианта осуществления способа, соответствующего изобретению.
Фиг. 7 представляет дополнительный пример варианта осуществления способа, соответствующего изобретению.
Фиг. 8 представляет дополнительный пример варианта осуществления способа, соответствующего изобретению.
Фиг. 9 представляет дополнительный пример варианта осуществления способа, соответствующего изобретению.
Фиг. 10 представляет дополнительный пример варианта осуществления способа, соответствующего изобретению.
Фиг. 11 показывает примеры вариантов осуществления асимметричных объектов.
Фиг. 12 показывает двумерные изображения, соответствующие примеру варианта осуществления изобретения.
Фиг. 13 показывает двумерные изображения, соответствующие другому примеру варианта осуществления изобретения.
Осуществление изобретения
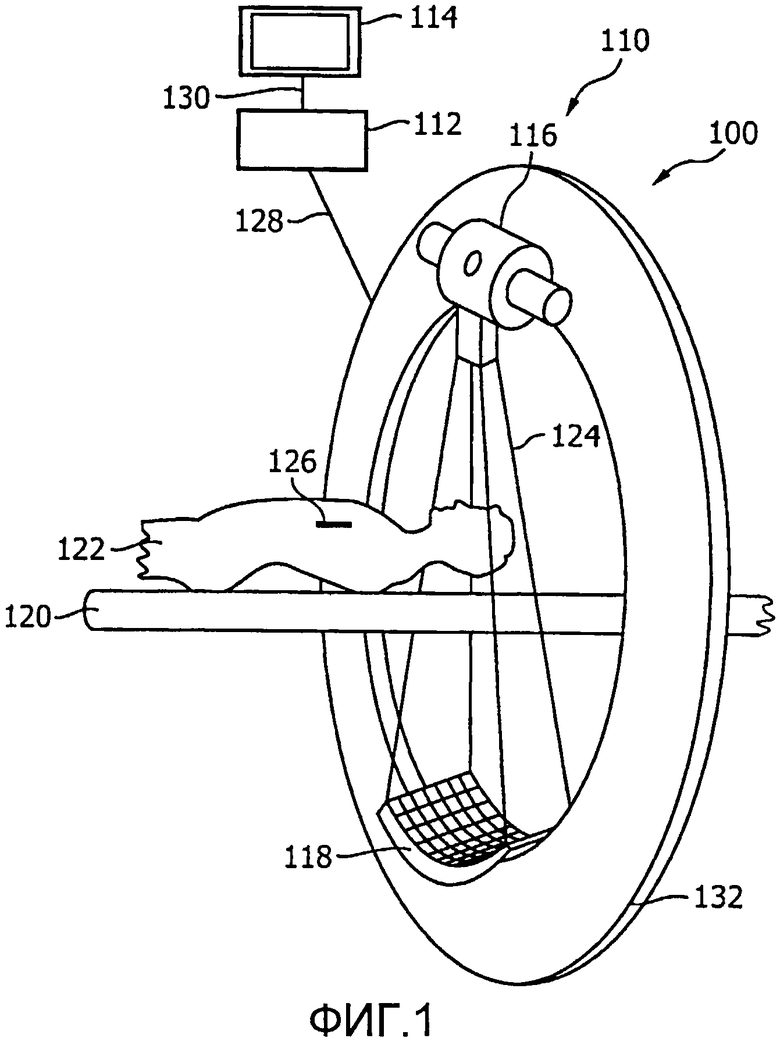
На фиг. 1 представлена медицинская система 100 формирования изображений, причем упомянутая система содержит средство 110 получения изображений, блок 112 обработки данных и дисплей 114. Средство 110 получения содержит источник 116 рентгеновского излучения и устройство 118 детектора. Дополнительно, может обеспечиваться стол 120, на котором может быть расположен интересующий объект, например, пациент 122. Для получения изображения с помощью средства 110 получения, пациент 122, находящийся на столе 120, может быть расположен между источником 116 рентгеновского излучения и устройством 118 детектора, так чтобы рентгеновские лучи 124, излучаемые источником рентгеновского излучения в направлении устройства 118 детектора проходили через интересующую область пациента 122.
Дополнительно, показан объект 126, обеспеченный по меньшей мере тремя маркерами, видимыми на двумерном изображении, полученном средством 110 получения. Следует заметить, что на фиг. 1 маркеры не показаны. Средство 110 получения выполнено с возможностью получения данных двумерного изображения объекта, например, объекта 126 с тремя маркерами. В показанном примере варианта осуществления маркеры непроницаемы для излучения и, таким образом, видны на рентгеновском изображении.
Средство 110 получения соединено с блоком обработки данных, например, посредством информационного соединения 128. Таким образом, данные изображения, обеспечиваемые устройством 118 детектора, предоставляют на блок 112 обработки.
Блок 112 обработки данных выполнен с возможностью обнаружения маркеров в двумерном изображении и идентификации пространственного расположения и угла поворота объекта, например, объекта 126 с маркерами, относительно геометрии системы, основываясь на маркерах.
Другими словами, данные двумерного изображения анализируются в блоке 112 обработки и маркеры, видимые в двумерном изображении, обнаруживаются и используются для дополнительных вычислений пространственного расположения и угла поворота объекта.
Блок 112 обработки данных соединен с дисплеем 114 посредством информационного соединения 113.
Конечно, информационные соединения 128 и 130, показанные как проводные соединения, могут также обеспечиваться как беспроводные соединения.
Дисплей 114 выполнен с возможностью отображения индикатора объекта, указывающего пространственное расположение и угол поворота объекта. Индикатор объекта вычисляется на основе идентифицированного пространственного расположения и угла поворота.
Как можно видеть на фиг. 1, медицинская система 100 формирования изображений показана как система компьютерной томографии (CT) с гентри 132 с источником 116 рентгеновского излучения и устройством 118 детектора, которая может поворачиваться вокруг пациента 122, создавая, таким образом, данные трехмерного изображения.
Следует заметить, что медицинская система формирования изображений может быть также предоставлена в другой форме, например, в виде так называемой рентгеновской системы типа «С-дуга», на которой устройство 118 детектора и источник 116 рентгеновского излучения устанавливаются на противоположных концах С-дуги, причем С-дуга может двигаться, например, поворачиваться вокруг пациента 122.
Однако, конечно, также возможно обеспечить медицинскую систему формирования изображений со статически неподвижным средством получения изображений, то есть, средством получения изображений, где устройство 118 детектора и источник 116 рентгеновского излучения крепятся без возможности движения.
В соответствии с дополнительным примером варианта осуществления, блок 112 обработки данных выполнен также с возможностью регистрации трехмерного изображения, например, полученного средством 110 получения изображений, с данными двумерного изображения. Дополнительно, дисплей 114 выполнен с возможностью отображения индикатора объекта вместе с данными изображения зарегистрированных двумерных и трехмерных изображений.
В соответствии с дополнительным примером варианта осуществления изобретения, хотя он не показан, средство получения изображений получает данные двумерного изображения посредством ультразвука. В таком случае, объект обеспечивается по меньшей мере тремя маркерами, видимыми в данных ультразвукового изображения, то есть, маркеры располагаются так, что ультразвук отражается заданным образом.
В соответствии с дополнительным примером варианта осуществления, который также не показан, описанные выше принципы получения изображений, то есть, рентгеновское излучение, ультразвук или магниторезонансная томография (MR), могут быть объединены, например, в рентгеновской системе формирования изображений, где данные двумерного изображения получаются посредством рентгеновского излучения и маркеры также видны в изображениях, полученных с использованием ультразвука или MR. Конечно, возможна также любая другая комбинация.
Далее, со ссылкой на фиг. 2, описываются основные этапы способа действия медицинской системы формирования изображений, например, медицинской системы 100 формирования изображений, соответствующей фиг. 1.
На этапе 12 получения данные двумерного изображения объекта получают с помощью системы формирования изображений. Объект обеспечивается по меньшей мере тремя маркерами, видимыми в двумерном изображении (ссылочная позиция 14 данных изображения). Дополнительно, на этапе 16 обнаружения маркеры обнаруживают в двумерном изображении. Затем на этапе 18 идентификации пространственное расположение и угол поворота 20 объекта идентифицируются относительно геометрии системы, основываясь на маркерах.
Далее на этапе 22 отображения отображается индикатор 24 объекта, указывающий пространственное расположение и угол поворота объекта, причем индикатор 24 объекта вычисляется на основе идентифицированного пространственного расположения и угла 20 поворота.
В соответствии с дополнительным примером варианта осуществления, хотя он не показан, индикатор 24 объекта является символом, указывающим центральную ось вдоль длины модели. Дополнительно, могут быть показаны внешние краевые точки и/или контур объекта.
В соответствии с другим примером варианта осуществления, индикатор объекта является визуализацией модели объекта. Например, индикатор объекта может также быть каркасной моделью объекта.
В случае, когда используется медицинская система 100 формирования изображений, соответствующая фиг. 1, данные двумерного изображения получают с помощью рентгеновских лучей, и маркеры являются непроницаемыми для излучения.
В соответствии с дополнительным примером варианта осуществления способа, данные двумерного изображения получают с помощью ультразвука или MR, и маркеры видны в данных ультразвукового изображения или данных MR-изображения, и индикатор объекта отображается, например, в дополнение к рентгеновскому изображению.
В соответствии с примером варианта осуществления, показанным на фиг. 3, трехмерное изображение регистрируется с данными 14 двумерного изображения на этапе 32 регистрации. Трехмерное изображение или данные 30 изображения могут, например, быть получены перед этапом 12 получения в виде этапа 34 предварительного получения.
В соответствии с другим примером варианта осуществления, трехмерное изображение 30 обеспечивается, например, банком данных, хранящимся в памяти.
Как можно видеть на фиг. 3, индикатор 24 объекта отображают вместе с данными изображения зарегистрированных трехмерного и двумерного изображений 36, обеспечиваемых на этапе 32 регистрации, и их совместное отображение обозначают стрелкой 38, указывающей на прямоугольник этапа 22 отображения.
В соответствии с дополнительным примером варианта осуществления, трехмерные данные 30 являются анатомической моделью, извлеченной из полученных трехмерных данных изображения, но которая не показывается далее на фиг. 3.
Как уже упоминалось выше, индикатор 24 объекта может содержать индикацию контура объекта.
В соответствии с дополнительным примером варианта осуществления, объект является расширяющимся объектом и индикатор объекта содержит, индикацию контура объекта в конечном расширенном состоянии в дополнение к расположению и углу поворота объекта.
Например, в случае, если объектом является стент, пользователю, таким образом, предоставляется информация, где и в каком состоянии будет расположен стент, когда стент раскрывается. Это может быть полезно для процедур расположения стентов, так как этап раскрытия или расширения стента является необратимым.
Например, стент подают через катетер, и он имеет только две степени свободы, поворот и поступательное движение вдоль оси катетера. В соответствии с дополнительным примером варианта осуществления, объект является удлиненным, и вращение объекта обнаруживается на основе соответствующего количества маркеров, и индикатор вращения отображается, например, в сочетании с индикатором объекта (дополнительно не показан).
В соответствии с дополнительным примером варианта осуществления, показанным на фиг. 4, перед этапом 12 получения, требуемое пространственное расположение и угла 40 поворота объекта предварительно определяется на этапе 42 предварительного определения. Соответственно конфигурация 44 маркеров определяется путем вычислений из информации о положении и повороте объекта на этапе 46 вычислений для требуемого положения 40.
Дополнительно, на этапе 48 создания, создается проекция 50 вычисленной конфигурации 44 маркеров в соответствии с геометрией системы во время этапа 12 получения двумерного изображения. Созданная проекция 50 затем отображается на этапе 52 отображения в качестве целевого индикатора 54.
Как пример, проекция 50 может быть двумерной проекцией.
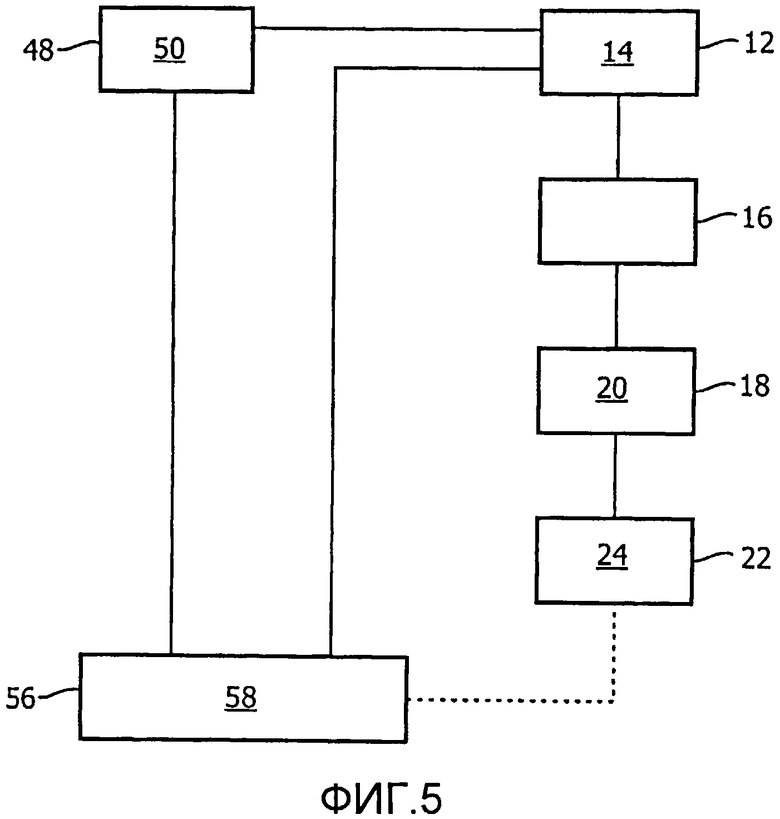
В соответствии с дополнительным примером варианта осуществления, схематично представленным на фиг. 5, созданная проекция 50 накладывается на двумерное изображение на этапе 56 объединения, обеспечивая, таким образом, улучшенное двумерное изображение 58.
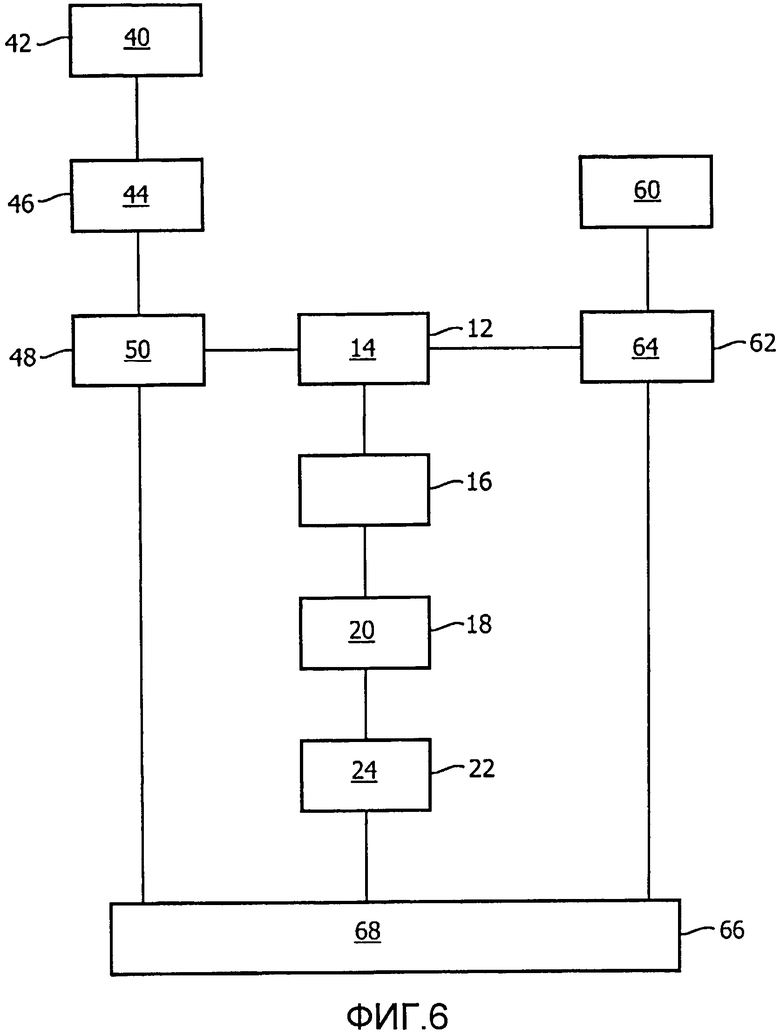
В соответствии с дополнительным примером варианта осуществления, трехмерное изображение 60 регистрируется с данными 14 двумерного изображения на этапе 62 регистрации и созданная проекция 50, связанная с требуемым положением, отображается вместе с данными изображений зарегистрированных трехмерного и двумерного изображений 64 на этапе 66 объединенного отображения, обеспечивая, таким образом, дополнительно улучшенную информацию изображения 68.
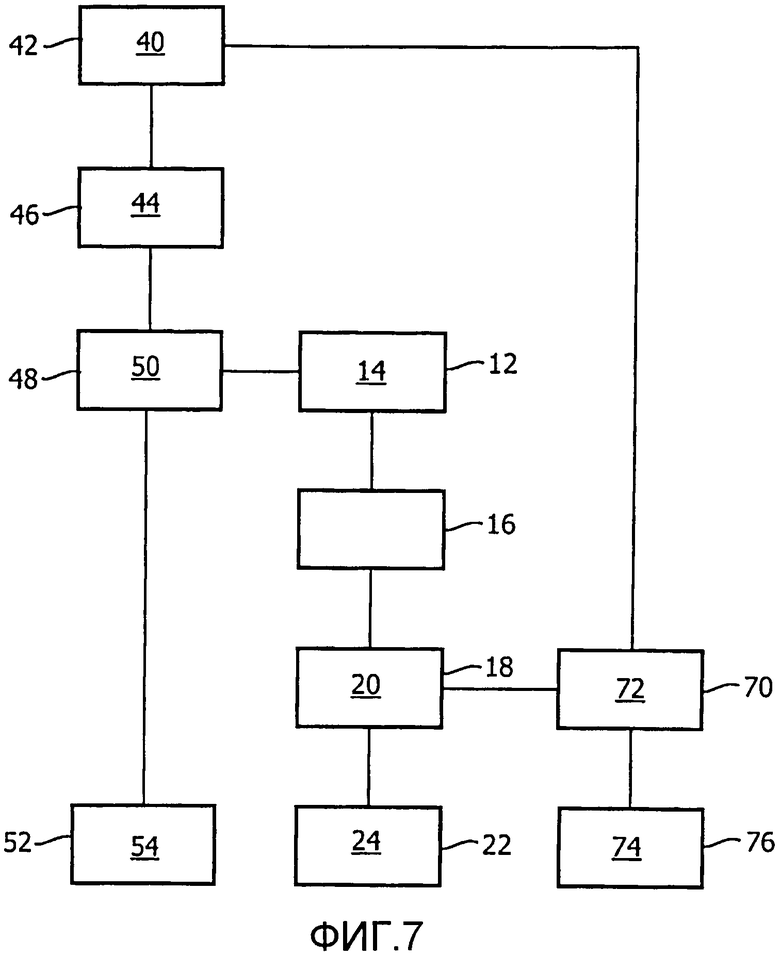
В соответствии с дополнительным примером варианта осуществления, показанным на фиг. 7, идентифицированные фактические пространственное расположение и угол 20 поворота объекта сравниваются с заданным пространственным расположением и углом 40 поворота объекта на этапе 70 сравнения, обеспечивая информацию 72 регистрации вектора. Дополнительно, основываясь на информации 72 регистрации вектора, на этапе 76 создания обеспечивается индикатор 74 направления движения, который отображается таким образом, что пользователю облегчается маневрирование объектом.
Например, для маневрирования или перемещения объекта в требуемое или целевое положение, фактическое положение и угол поворота сводятся к заданным положению и углу поворота.
В соответствии с дополнительным примером варианта осуществления (не показан), индикатор 74 направления движения содержит сигнал направления, в котором пространственная ориентация пользователя учитывается таким образом, что сигнал направления указывает фактическое направление перемещения пользователем, необходимое для перемещения объекта в сторону целевого положения, и ориентацию.
Другими словами, пользователю предоставляется информация, в каком направлении он должен осуществлять перемещение, например, манипулятора, чтобы достигнуть правильного расположения объекта. Например, объект может быть расположен внутри сложно структурированного объема, и манипулятор может контактировать с объектом только из определенного места назначения или с определенного направления, перемещение, необходимое для пользователя, может отображать информацию, показанную на дисплее, или быть противоположным информации, показанной на дисплее. В таком случае сигнал направления, предоставляемый пользователю, может давать ему или ей прямые команды, как двигаться, без необходимости анализировать правильные пространственные соотношения текущей ситуации.
В соответствии с дополнительным примером варианта осуществления изобретения, обеспечивается автоматическое расположение объекта. Следовательно, данные расположения предоставляются таким образом, чтобы манипулирующее устройство могло перемещать объект в требуемое или целевое положение с требуемым или целевым поворотом.
В соответствии с дополнительным примером варианта осуществления, показанным на фиг. 8, во время этапа 42 предварительного определения, где предварительно определяются требуемые пространственное расположение и угол 40 поворота объекта, оптимальное проекционное направление 80 для получаемых данных двумерного изображения определяется на этапе 82 определения на основе предварительно определенных пространственного расположения и угла поворота объекта. Оптимальное проекционное направление 80 затем применяется во время 12 этапа получения двумерного изображения, указанного стрелкой 84, идущей к соответствующему прямоугольнику этапа 12 получения.
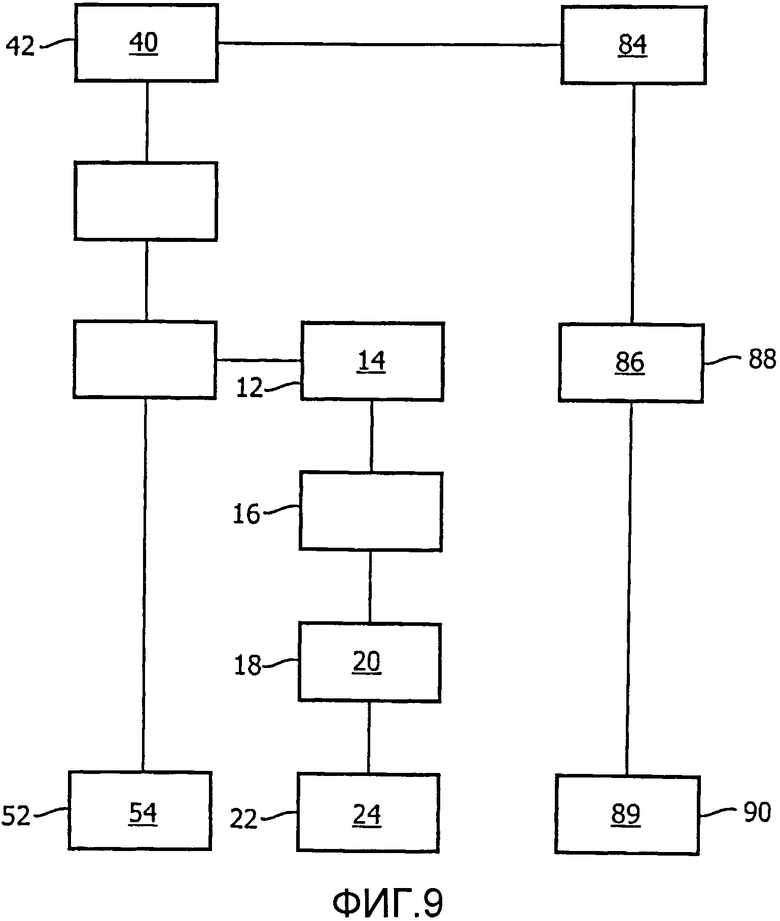
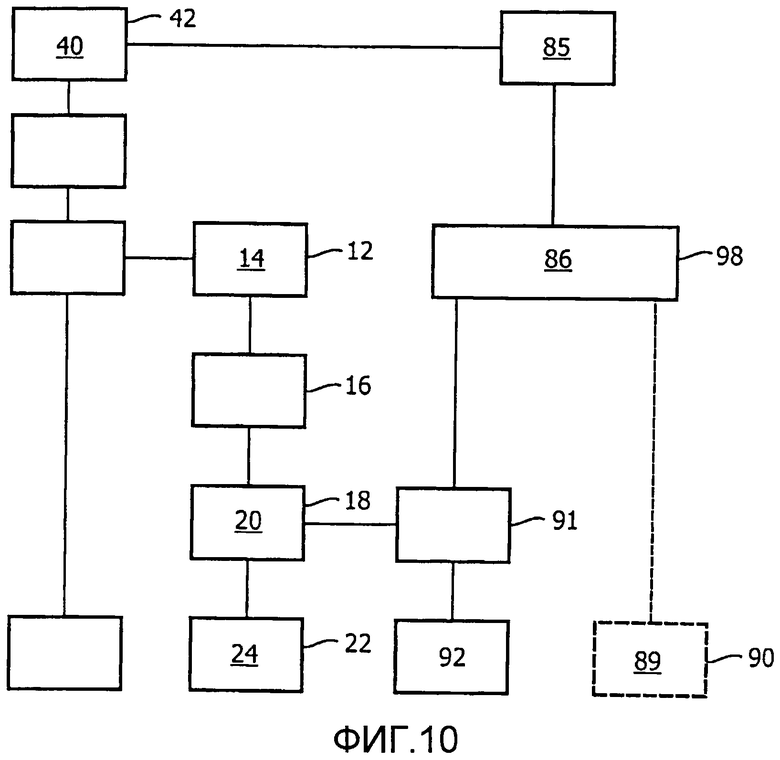
В соответствии с дополнительным примером варианта осуществления, показанным на фиг. 9, на этапе 87 предварительного определения для по меньшей мере одних дополнительного расположения и угла 85 поворота предварительно определяется дополнительная конфигурация 86. Дополнительно, дополнительная конфигурация 86 отображается как дополнительная информация 89 на этапе 90 отображения.
Например, дополнительная конфигурация 86 относится к нежелательным ориентации и положению, и дополнительная конфигурация 86 отображается иначе, чем вычисленная конфигурация на этапе 52 отображения.
В соответствии с дополнительным примером улучшенного варианта осуществления изобретения, фактические ориентация и положение, то есть пространственное расположение и угол 20 поворота, сравниваются с дополнительной конфигурацией 86 на этапе 91 сравнения и, в случае заданной степени корреляции, обеспечивается 93 предупредительный сигнал 92.
Как уже указывалось выше, объект может быть, например, стентом, который может быть подан через катетер. Для примера, стент имеет только две степени свободы, поворот и продольное движение вдоль оси катетера.
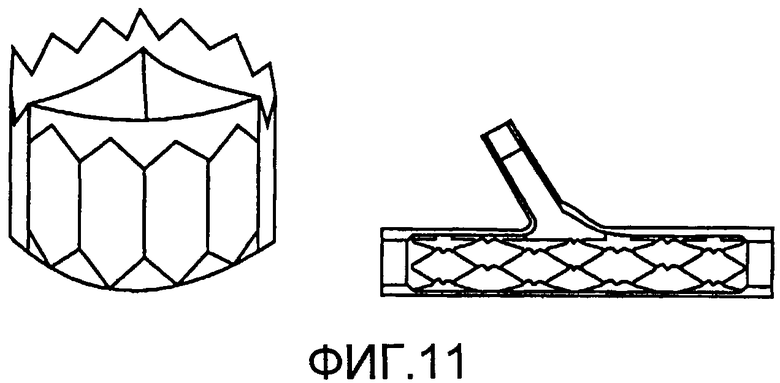
Стенты приобретают все большее значение; например, в настоящее время всё большее количество сосудистых заболеваний можно лечить минимально инвазивно с использованием рентгеновского излучения. Чтобы достигнуть этого, разрабатываются все более сложные стенты для различных применений: стенты с искусственным сердечным клапаном внутри, стенты с отверстиями для боковых ветвей (фенестрированные стенты), разветвленные стенты для бифуркаций, стенты с шелковым покрытием на шейке аневризмы. Пример коронарного стента с боковым ответвлением приведен на фиг. 11.
В отличие от традиционных стентов, эти стенты фактически больше не являются симметричными, и стенты должны имплантироваться с определенным углом поворота. Однако, из-за проекционного характера систем формирования изображений, таких как рентгеновские системы формирования изображений, трудно имплантировать стент в заданной ориентации.
Следовательно, описанный выше пример варианта осуществления помогает имплантировать стент в определенной ориентации.
Трудность определения ориентации стента с помощью рентгеновского излучения, в частности, имеет место, когда стент еще не был полностью раскрыт. Например, для стента аортального клапана, створки клапана вообще не видны на рентгеновском изображении, и сам стент фактически еще является симметричным. Пример стента аортального клапана также показан на фиг. 11.
В соответствии с дополнительным аспектом изобретения, описанные выше этапы способа будут объяснены со ссылкой на стент аортального клапана в качестве примера. Однако, варианты осуществления для других применений будут ему подобны.
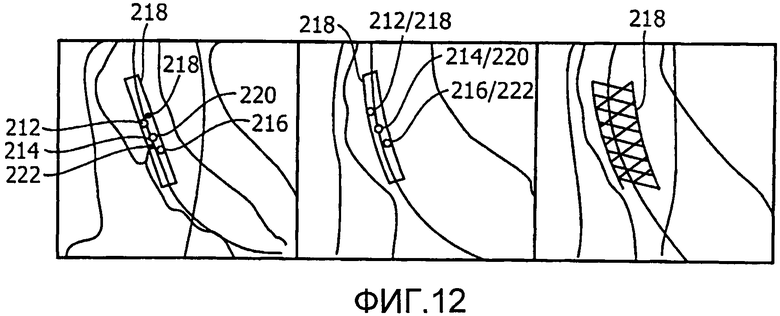
В соответствии с вариантом осуществления, показанным на фиг. 12, на этапе планирования были определены требуемые положение и ориентация. Как пример, это может быть сделано либо вручную, либо используя трехмерную сегментацию, чтобы автоматически вычислять оптимальные положение и ориентацию стента. Из этого, как упомянуто выше, может быть вычислено требуемое трехмерное положение маркеров.
Во время проведения операции информация о геометрии рентгеновской системы, местоположении пациента и требуемом местоположении стента и его маркеров используется для вычисления целевых проекционных точек. Они накладываются на рентгеновское изображение, как показано на фиг. 12A, где целевые проекционные точки обозначены малыми кругами 212, 214 и 216. Таким образом, пользователю предоставляется целевое положение маркеров. На фиг. 12 стент 218 показан с тремя видимыми маркерами, обозначенными ссылочными позициями 220, 222 и 224. Как можно видеть на фиг. 12A, только один из маркеров, а именно маркер 220, совпадает с одной из целевых проекционных точек, а именно, с кругом 214. Таким образом, пользователю предоставляется информация об отношении между фактическим положением и целевым положением стента 218. Затем, пользователь может переместить стент согласно информации, полученной из фиг. 12A. Результат правильной регулировки угла поворота показан на фиг. 12B. Следует заметить, что маркеры 220, 222 и 224 совпадают с соответствующими целевыми положениями 212, 214 и 216. Таким образом, пользователю предоставляется информация, что стент 118 находится теперь в правильном положении, а также в правильной ориентации, то есть, имеет правильный угол поворота, и, в качестве следующего этапа, пользователь может раскрыть стент, так как он находится в конечном, то есть, требуемом положении. Результат раскрытия стента показан на фиг. 12C.
В соответствии с примером варианта осуществления способа, описанным выше, также возможно отображать текущую ориентацию имплантата, например, стента, относительно целевой ориентации.
Как можно видеть на фиг. 13, изображение поперечного сечения аортального клапана и луковицы показано вместе со вставленным стентом, указанным с помощью визуализации модели стента в раскрытой версии, которая показана как круг 312, включающий в себя три радиальные линии 314, символизирующие расположение сердечного клапана.
Во время операции маркеры прослеживаются, как описано выше. Затем, геометрическая информация рентгеновской системы, трехмерное положение маркеров относительно друг друга и информация о проекционных точках маркеров на рентгеновском изображении используются для определения трехмерного положения маркеров.
Исходя из этого, может быть реконструирована текущая ориентация стента, и результат может быть отображен на трехмерном изображении, как показано для примера на фиг. 13. Помимо фактического положения стента 312, пользователю предоставляется информация, как стент будет размещен в открытом состоянии, используя для этого показанную модель. Для правильного поворота требуемое или целевое положение указываются целевым указывающим символом 316 указания цели, например, пунктирной линией, представляющей строение сердечного клапана. Как можно видеть на фиг. 13A, фактическое положение и требуемое положение еще не совпадают, тогда как на фиг. 13B, после корректировки угла поворота, созданная проекция, указываемая целевым индикатором 316, накрывается моделью, представляющей стент в конечном состоянии 312. Следовательно, пользователю предоставляется информация о том, что стент теперь находится в правильном положении и может, таким образом, быть раскрыт. Конечно, для правильного расположения в направлении длины, которое не видно в поперечном сечении согласно фиг. 13, пользователю может также быть предоставлена соответствующая информация, например, в поперечном сечении по длине, которое дополнительно здесь не показано.
В соответствии с примером варианта осуществления изобретения, маркеры должны располагаться на различных высотах и различных углах объекта. Если они размещаются на различных высотах, они не могут накладываться с точки зрения начерченного в перспективе объекта, и их легче отличить. Размещение под различными углами обеспечивает то преимущество, что только две ориентации могут дать совпадение маркеров в двумерном изображении. Уникальность совпадения может быть достигнута, когда известно, какой маркер является ближайшим, или когда, например, добавляется ложный маркер, или когда эти три маркера могут быть различимы друг от друга.
В другом примере варианта осуществления настоящего изобретения обеспечивается компьютерная программа или элемент компьютерной программы, который характеризуется тем, что выполнен с возможностью выполнять на соответствующей системе этапы способа по одному из предшествующих вариантов осуществления.
Элемент компьютерной программы, следовательно, может храниться на компьютерном блоке, который также может быть частью варианта осуществления настоящего изобретения. Этот компьютерный блок может быть выполнен с возможностью выполнения или стимулирования выполнения этапов способа, описанного выше. Кроме того, он может быть выполнен с возможностью управлять компонентами описанного выше устройства. Компьютерный блок может быть выполнен с возможностью управлять автоматически и/или осуществлять команды пользователя. Компьютерная программа может быть загружена в оперативную память процессора. Процессор может, таким образом, быть оборудован для выполнения способа изобретения. Этот пример варианта осуществления изобретения охватывает как компьютерную программу, которая использует изобретение с самого начала, так и компьютерную программу, которая посредством обновления преобразует существующую программу в программу, которая использует изобретение. Далее, элемент компьютерной программы может быть способен обеспечить все необходимые этапы для выполнения процедуры примера варианта осуществления способа, как описано выше. В соответствии с дополнительным примером варианта осуществления настоящего изобретения, представляется считываемый компьютером носитель данных, такой как CD-ROM, и считываемый компьютером носитель данных имеет записанный на нем элемент компьютерной программы, причем элемент компьютерной программы описывается в предшествующем разделе.
Компьютерная программа может храниться и/или распространяться на соответствующем носителе данных, таком как оптический носитель или полупроводниковый носитель, предоставляемый вместе с другим аппаратурным обеспечением или как его часть, но может также распространяться в других формах, таких как через Интернет или другие проводные или беспроводные системы связи.
Однако, компьютерная программа может также быть представлена по сети, такой как "Всемирная паутина" и может быть загружена в оперативную память процессора из такой сети. В соответствии с дополнительным примером варианта осуществления настоящего изобретения, обеспечивается среда, чтобы сделать элемент компьютерной программы доступным для загрузки, причем элемент компьютерной программы выполнен с возможностью выполнения способа, соответствующего одному из ранее описанных вариантов осуществления изобретения.
Следует заметить, что варианты осуществления изобретения описываются со ссылкой на разные объекты изобретения. В частности, некоторые варианты осуществления описываются со ссылкой на пункты формулы изобретения типа способа, тогда как другие варианты осуществления описываются со ссылкой на пункты формулы изобретения типа устройства. Однако, специалист в данной области техники, поймет из вышесказанного и последующего описания, что, если не указано иное, в дополнение к любому объединению признаков, принадлежащих одному типу объекта изобретения, любое объединение между признаками относящимися к разным объектам изобретения также считается раскрытым в настоящей заявке. Однако, все признаки могут объединяться, обеспечивая синергетические эффекты, которые являются большим, чем простое суммирование признаков.
В формуле изобретения слово "содержащий" не исключает другие элементы или этапы, и форма единственного числа не исключают наличие множества. Одиночный процессор или другой блок могут выполнять функции нескольких позиций, описанных в формуле изобретения. Простой факт, что определенные признаки приводятся во взаимно различных зависимых пунктах формулы изобретения, не указывает на то, что объединение этих признаков не может использоваться для достижения преимущества. Любые ссылочные знаки в формуле изобретения не должны рассматриваться как ограничение объема изобретения.




Изобретение относится к медицинской технике, а именно к средствам для определения конкретной ориентации объекта. Медицинская система формирования изображения содержит средство получения двумерного изображения объекта, где объект обеспечен тремя маркерами, блок обработки данных, выполненный с возможностью обнаружения маркеров, идентификации пространственного расположения и угла поворота объекта относительно геометрии системы, вычисления конфигурации маркеров и создания проекции вычисленной конфигурации маркера, и дисплей, отображающий индикатор объекта и созданную проекцию в качестве целевого индикатора. Считываемый компьютером носитель содержит элемент программы, обеспечивающей работу системы формирования изображения. Использование изобретение позволяет точно определять местоположение и ориентацию объекта в пространстве. 2 н.и 8 з.п. ф-лы, 13 ил.
1. Медицинская система (100) формирования изображений, содержащая:
средство (110) получения изображений;
блок (112) обработки данных; и
дисплей (114),
причем средство (110) получения выполнено с возможностью получения данных двумерного (2D) изображения объекта, причем объект обеспечен по меньшей мере тремя маркерами, видимыми в двумерном изображении;
причем блок (112) обработки данных выполнен с возможностью обнаружения маркеров в двумерном изображении и идентификации пространственного расположения и угла поворота объекта относительно геометрии системы, основываясь на маркерах; и
причем дисплей (114) выполнен с возможностью отображения индикатора объекта, указывающего пространственное расположение и угол поворота объекта;
причем блок (112) обработки данных выполнен с возможностью, до того, как средство (110) получения получает данные двумерного изображения объекта, вычислять (46) конфигурацию (44) маркеров для заданных требуемых пространственного расположения и угла (40) поворота объекта;
причем блок (112) обработки данных выполнен с возможностью создания проекции (50) вычисленной конфигурации маркера в соответствии с геометрией системы во время получения двумерного изображения; и
причем дисплей (114) выполнен с возможностью отображения созданной проекции в качестве целевого индикатора (54).
2. Система по п. 1, в которой средство (110) получения выполнено с возможностью получения данных двумерного изображения с помощью рентгеновских лучей, и в которой маркеры являются непроницаемыми для излучения.
3. Система по п. 1 или 2, в которой блок (112) обработки данных выполнен с возможностью регистрирования (32) трехмерного (3D) изображения (30) с данными двумерного изображения, и в которой дисплей (114) выполнен с возможностью отображения индикатора объекта вместе с данными изображения зарегистрированных трехмерного и двумерного изображений (36).
4. Система по п. 3, в которой данные трехмерного изображения являются анатомической моделью, извлеченной из полученных данных трехмерного изображения.
5. Система по п. 1, в которой объект является удлиненным объектом, и в которой блок (112) обработки данных выполнен с возможностью обнаружения вращения объекта, и причем дисплей (114) выполнен с возможностью отображения индикатора вращения.
6. Система по п. 1, в которой блок (112) обработки данных выполнен с возможностью наложения (56) созданной проекции (50) на двумерное изображение (14).
7. Система по п. 1 или 6, в которой блок (112) обработки данных выполнен с возможностью сравнения (72) идентифицированных фактических пространственного расположения и угла (20) поворота объекта с заданными требуемыми пространственным расположением и углом (40) поворота объекта, причем блок (112) обработки данных
выполнен с возможностью обеспечения (76) индикатора (74) направления движения, так что маневрирование объекта облегчается.
8. Система по п. 1, в которой блок (112) обработки данных выполнен с возможностью определения (82) оптимального проекционного направления (80) для получения данных двумерного изображения на основе заданных требуемых пространственного расположения и угла (40) поворота объекта; причем средство (110) получения выполнено с возможностью получения оптимального проекционного направления (80), применяемого (48) во время получения данных двумерного изображения объекта средством (110) получения.
9. Система по п. 1, в которой блок (112) обработки данных выполнен с возможностью задавать (88) дополнительную конфигурацию (86) для по меньшей мере одного дополнительного расположения и угла (84) поворота; и в которой дисплей (114) выполнен с возможностью отображения (90) дополнительной конфигурации.
10. Считываемый компьютером носитель данных, на котором хранят элемент программы для управления системой по п. 1, который при выполнении вычисляющим блоком обработки выполнен с возможностью выполнения этапов, на которых:
a) получают (12) двумерное изображение (14) объекта (126; 218) с помощью системы (100) получения изображений, причем объект обеспечивается по меньшей мере тремя маркерами (220, 222, 224), видимыми в двумерном изображении;
b) обнаруживают (16) маркеры в двумерном изображении;
c) идентифицируют (18) пространственное расположение и угол (20) поворота объекта относительно геометрии системы, основываясь на маркерах;
d) отображают (22) индикатор (24) объекта, указывающий пространственное расположение и угол поворота объекта;
причем до этапа а) задают требуемые пространственное расположение и угол (40) поворота объекта, и причем вычисляют (46) конфигурацию (44) маркеров для требуемого положения;
причем двумерную проекцию (50) вычисленной конфигурации маркеров создают (48) в соответствии с геометрией системы во время получения двумерного изображения на этапе а); и
причем созданную проекцию отображают (52) в качестве целевого индикатора (54).
| US 2009310832 A1, 17.12.2009 | |||
| US 2001034480 A1, 25.10.2001 | |||
| US 2010094124 A1, 15.04.2010 | |||
| US 6493575 B1, 10.12.2002 | |||
| US 2006058647 A1, 16.03.2006 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ ВНУТРИПРОСВЕТНОГО РАЗМЕЩЕНИЯ РАЗВЕТВЛЕННОГО НА ДВЕ ВЕТВИ ВНУТРИПРОСВЕТНОГО ТРАНСПЛАНТАТА | 1999 |
|
RU2239390C2 |

