Область техники, к которой относится изобретение
Устройство относится к устройству оказания помощи, способу оказания помощи и компьютерной программе оказания помощи для оказания помощи пользователю при перемещении элемента вставки, который должен вводиться в объекте в целевой элемент внутри объекта. Изобретение относится к устройству оказания помощи, способу оказания помощи и компьютерной программе оказания помощи для оказания помощи пользователю при перемещении элемента вставки, который должен вводиться в объекте в целевой элемент внутри объекта. Изобретение дополнительно относится к хирургической системе для введения элемента вставки в объект, содержащей устройство оказания помощи.
Уровень техники изобретения
Документ WO 2008/071014 A1 раскрывает поддерживаемый компьютером способ дистальной блокировки интрамедуллярных штифтов. Устанавливается виртуальное геометрическое представление дистальной части с дистальным отверстием блокировки и первое и второе медицинские изображения получают посредством рентгеновского блока, в котором оба изображения показывают дистальную часть с дистальным отверстием блокировки и в котором изображения получены в нескольких направлениях сбора данных. Положение продольной оси дистальной части и положение оси дистального отверстия блокировки вычисляют, используя изображения и виртуальное геометрическое представление. Вычисленная позиционная информация используется внешним направляющим средством для сверления в кости отверстия, которое выравнивается с дистальным отверстием блокировки.
Документ US 2006/0079745 A1 раскрывает систему навигации для развертывания медицинского устройства внутри пациента и улучшения отображаемого изображения анатомических признаков для просмотра спроецированного местоположения и перемещения медицинских устройств и спроецированных местоположений множества анатомических признаков и других пространственных маркеров в рабочей области. Отображение информации рентгеновской системы получения изображения улучшается таким образом и врач может более легко ориентироваться в трех измерениях, используя рентгеновский дисплей с одиночной плоскостью. Проекция точек и геометрических форм внутри тела пациента на известную плоскость получения изображения может быть получена, используя соответствующие параметры получения изображения и проекционную геометрию.
Документ US 2005/0107688 A1 раскрывает систему для подачи стента в выбранное положение внутри полости тела пациента, в которой стент прикрепляется к катетеру. Система содержит интерфейс пользователя для приема ввода положения, указывающего выбранное положение, и медицинскую систему позиционирования для определения текущего положения стента внутри полости. Процессор накладывает друг на друга представление стента, дающее текущее положение стента во время движения катетера внутри полости, и представление маркировки, дающее ввод положения на изображение полости.
Документ US 2011/0261180 A1 раскрывает систему для выполнения медицинской процедуры на пациенте, в которой система содержит зонд для получения изображения, определяющий поле зрения относительно пациента. Зонд для получения изображения содержит радиочастотный передатчик, излучающий сигнал в поле зрения, и радиочастотный приемник, принимающий сигнал, отраженный на основе электрического свойства материала, находящегося в поле зрения. Блок управления, основываясь на отраженном сигнале, принятом радиочастотным приемником, определяет местоположение границы материала внутри поля зрения, которая отображается на дисплее.
В целом, во время минимально инвазивных операций получают и отображают проекционные рентгеновские изображения, чтобы позволить врачу определять положение элемента вставки, такого как проволочный направитель, и положение целевого элемента, такого как отверстие сосуда внутри пациента. Проекционное изображение является двумерным изображением, не обеспечивающим достаточной информации, чтобы позволить врачу точно определить положение элемента вставки и целевого элемента внутри пациента, и поэтому врач должен, например, получать проекционные изображения в различных направлениях получения изображений, чтобы более точно определять эти положения. Это ведет к относительно высокой дозе радиации, получаемой пациентом, и занимает относительно долгое время.
Сущность изобретения
Задача настоящего изобретения заключается в обеспечении устройства оказания помощи, способа оказания помощи и компьютерной программы оказания помощи для оказания помощи пользователю при перемещении элемента вставки, который должен вводиться в объекте в целевой элемент внутри объекта, которые позволяют пользователю точнее и быстрее перемещать элемент вставки к целевому элементу внутри объекта.
В первом варианте настоящего изобретения представляется устройство оказания помощи для оказания помощи пользователю при перемещении элемента вставки, который должен вводиться в объекте в целевой элемент внутри объекта, причем устройство оказания помощи содержит:
- блок обеспечения изображения целевого элемента для обеспечения изображения целевого элемента, показывающего целевой элемент,
- блок формирования представления целевого элемента для формирования представления целевого элемента, представляющего целевой элемент внутри объекта в его трехмерном положении с трехмерной ориентацией и его размером, основываясь на изображении целевого элемента, в котором целевой элемент содержит по меньшей мере одно отверстие, в котором блок формирования представления целевого элемента выполнен с возможностью формирования представления целевого элемента, содержащего по меньшей мере одно кольцо, представляющее по меньшей мере отверстие целевого элемента внутри объекта в трехмерном положении, с трехмерной ориентацией и с размером, равным, по меньшей мере, размеру отверстия целевого элемента,
- блок слежения для слежения за трехмерным положением элемента вставки внутри объекта, когда элемент вставки движется к целевому элементу, в котором прослеживаемый элемент имеет по меньшей мере одно отверстие, и
- дисплей для отображения представления по меньшей мере одного кольца целевого элемента и по меньшей мере одного отверстия элемента вставки.
Поскольку представление целевого элемента формируется таким образом, что оно представляет целевой элемент внутри объекта в трехмерном положении, с трехмерной ориентацией и с размером, основываясь на изображении целевого элемента, причем блок слежения следит за трехмерным положением элемента вставки внутри объекта, когда элемент вставки движется к целевому элементу, и в котором дисплей отображает это представление целевого элемента и пользователю предоставляются отслеживаемое положение элемента вставки, трехмерное положение и ориентация целевого элемента относительно фактического положения элемента вставки, когда элемент вставки движется к целевому элементу, что позволяет пользователю более точно и быстрее перемещать элемент вставки к целевому элементу.
Блок слежения предпочтительно выполнен с возможностью слежения за трехмерным положением элемента вставки в реальном времени внутри объекта в то время, когда элемент вставки движется к целевому элементу. Дисплей предпочтительно выполнен с возможностью отображения представления целевого элемента, представляющего целевой элемент внутри объекта в его трехмерном положении, с трехмерной ориентацией и с размером на двумерной поверхности. Например, дисплей может быть выполнен с возможностью моделирования проекции представления целевого элемента на двумерную поверхность для отображения представления целевого элемента на двумерной поверхности. Кроме того, трехмерное положение элемента вставки может виртуально проецироваться на двумерную поверхность, чтобы показать на дисплее пространственное соотношение между целевым элементом и элементом вставки, особенно, в реальном времени.
Блок обеспечения изображения целевого элемента может быть выполнен с возможностью обеспечения трехмерного компьютерного томографического изображения, изображения, полученного посредством магнитного резонанса, ядерного изображения, такого как изображение позитронно-эмиссионной томографии или изображение однофотонной эмиссионной компьютерной томографии, ультразвуковое изображение и так далее, в качестве изображения целевого элемента. Однако, блок обеспечения изображения целевого элемента может также быть выполнен с возможностью обеспечения двух или более двухмерных изображений, в частности, двух или более двумерных проекционных изображений в качестве изображений целевого элемента, где блок формирования представления целевого элемента может быть выполнен с возможностью формирования представления целевого элемента, основываясь на двух или более двумерных изображениях целевого элемента. Объектом предпочтительно является живое существо, такое как человек или животное, причем целевым элементом предпочтительно является внутренняя часть живого существа, такая как сосуд, особенно, отверстие сосуда. Элемент вставки может быть хирургическим устройством, таким как игла или катетер. Элемент вставки может также быть другим хирургическим элементом, таким как трансплантат, например, стент.
Блок обеспечения изображения целевого элемента может быть блоком запоминающего устройства, в котором изображение целевого элемента уже хранится и из которого изображение целевого элемента может быть восстановлено для предоставления того же самого изображения. Блок обеспечения изображения целевого элемента может также быть приемным блоком для приема изображения целевого элемента от другого блока, такого как средство получения изображения, формирующее изображение целевого элемента. Кроме того, блок обеспечения изображения целевого элемента может быть средством получения изображения, формирующим изображение целевого элемента.
Блок формирования представления целевого элемента предпочтительно выполнен с возможностью сегментирования целевого элемента внутри предоставленного изображения целевого элемента для формирования представления целевого элемента. Блок формирования представления целевого элемента может быть выполнен с возможностью сегментации всего целевого элемента или только части целевого элемента для формирования представления целевого элемента. Например, если целевой элемент содержит отверстие, блок формирования представления целевого элемента может быть выполнен с возможностью сегментации только края отверстия и обеспечения кольцеобразного представления целевого элемента, имеющего трехмерное положение, трехмерную ориентацию и размер, соответствующие трехмерному положению, трехмерной ориентации и размеру сегментированного отверстия. В варианте осуществления одно или несколько изображений целевого элемента показывают отверстие почечной артерии и кольцо может иметь такие размер, положение и ориентацию, которые соответствуют отверстию почечной артерии, чтобы сформировать представление целевого элемента. Форма кольца поэтому зависит от формы отверстия. Например, кольцо может быть эллиптическим, круговым или сформованным другим способом. Это отображение кольца и прослеживаемое положение элемента вставки очень эффективно помогают пользователю при перемещении элемента вставки через отверстие целевого элемента, перемещая элемент вставки таким образом, что отображаемое прослеживаемое положение элемента вставки проникает через отображаемое кольцо. Блок формирования представления целевого элемента может также быть выполнен с возможностью формирования представления целевого элемента, содержащего признак, указывающий центр кольца, имеющего трехмерное положение, трехмерную ориентацию и размер, соответствующие трехмерному положению, трехмерной ориентации и размеру отверстия целевого элемента.
Устройство оказания помощи может дополнительно содержать блок определения спроецированного положения для определения положения по меньшей мере части элемента вставки, спроецированного на кольцевую плоскость, определенную кольцом представления целевого элемента, в котором дисплей выполнен с возможностью отображения спроецированного положения по меньшей мере части элемента вставки внутри плоскости кольца с помощью кольца. Например, положение наконечника элемента вставки может проецироваться на плоскость кольца. Это показывает пользователю, насколько по центру элемент вставки фактически расположен относительно отверстия целевого элемента, что позволяет пользователю корректировать положение элемента вставки относительно отверстия целевого элемента, например, перемещая элемент вставки внутри объекта так чтобы спроецированное положение элемента вставки, отображаемое на дисплее, располагалось ближе к центру внутри отображаемого кольца. Если часть элемента вставки уже расположена внутри кольца, положение этой части может рассматриваться как спроецированное положение, так чтобы оно могла указывать насколько близко к центру располагается эта часть внутри кольца.
Целевой элемент предпочтительно содержит трубкообразный элемент, причем блок формирования представления целевого элемента выполнен с возможностью формирования представления целевого элемента, содержащего трехмерное положение, трехмерную ориентацию и размер, соответствующие трехмерному положению, трехмерной ориентации и размеру трубкообразного элемента целевого элемента. Это позволяет предоставлять пользователю информацию также о длине целевого элемента или о части целевого элемента, что может дополнительно улучшить оказание помощи пользователю при определении положения элемента вставки относительно целевого элемента.
В варианте осуществления целевой элемент содержит несколько отверстий, причем блок формирования представления целевого элемента выполнен с возможностью формирования представления целевого элемента, содержащего несколько колец, представляющих несколько отверстий целевого элемента внутри объекта в трехмерном положении, с трехмерной ориентацией и размером отверстий целевого элемента, причем прослеживаемый элемент вставки также имеет отверстия и дисплей выполнен с возможностью отображения колец представления целевого элемента и колец, представляющих отверстия элемента вставки. Пользователь поэтому должен только переместить элемент вставки таким образом, чтобы на дисплее кольца, представляющие отверстия элемента вставки, совпадали с кольцами представления целевого элемента, чтобы точно расположить элемент вставки внутри целевого элемента. В этом примере элемент вставки предпочтительно является стентом, имеющим отверстия, которые должны быть расположены внутри сосуда, который тоже имеет отверстия, так чтобы отверстия стента совпадали с отверстиями сосуда.
Устройство оказания помощи может дополнительно содержать блок определения расстояния для определения расстояния между целевым элементом и элементом вставки, основываясь на сформированном представлении целевого элемента и прослеживаемым положении элемента вставки, причем дисплей выполнен с возможностью отображения определенного расстояния. Кроме того, блок слежения также может выполнен с возможностью слежения за ориентацией элемента вставки внутри объекта, причем устройство оказания помощи может дополнительно содержать блок определения ориентации для определения ориентации элемента вставки относительно целевого элемента, основываясь на сформированном представлении целевого элемента и прослеживаемой ориентации элемента вставки, причем дисплей выполняется с возможностью отображения определенной ориентации. Отображение расстояния элемента вставки относительно целевого элемента и/или ориентации элемента вставки относительно целевого элемента дает пользователю дополнительную информацию, которая может позволить пользователю располагать элемент вставки относительно целевого элемента еще быстрее и/или еще более точно.
В предпочтительном варианте осуществления устройство оказания помощи содержит блок обеспечения изображения объекта для обеспечения изображения объекта, показывающего, по меньшей мере, часть объекта, причем дисплей выполнен с возможностью отображения представления целевого элемента и прослеживания положения элемента вставки на изображении объекта, то есть, дисплей может быть выполнен с возможностью отображения представления целевого элемента в его трехмерном положении и с ориентацией и размером на изображении объекта. В частности, блок обеспечения изображения объекта может быть выполнен с возможностью обеспечения заранее полученного изображения и/или фактического изображения объекта в качестве изображения объекта. В варианте осуществления прослеживаемое положение является положением наконечника элемента вставки. Он может отображаться как упрощенный значок на изображении объекта, который может быть двумерным изображением в реальном времени, подобным двумерному рентгеновскому изображению.
Блок обеспечения изображения объекта может быть выполнен с возможностью обеспечения несколько изображений объекта, которые соответствуют различным направлениям получения изображений, причем дисплей может быть выполнен с возможностью отображения представления целевого элемента и прослеживаемого положения элемента вставки на нескольких изображениях объекта. Например, блок обеспечения изображения объекта может быть выполнен с возможностью обеспечения нескольких, в частности, двух двумерных изображений объекта, и дисплей может быть выполнен с возможностью отображения представления целевого элемента прослеживаемого положения элемента вставки на нескольких двумерных изображениях объекта. Если обеспечиваются два изображения объекта, то они предпочтительно соответствуют направлениям получения изображений, перпендикулярным друг другу. Отображение представления целевого элемента и прослеживаемого положения элемента вставки на изображении объекта обеспечивает пользователю дополнительную полезную информацию, особенно анатомическую информацию, если изображение объекта является анатомическим изображением, которое может позволить пользователю располагать элемент вставки относительно целевого элемента еще быстрее и еще более точно.
В варианте осуществления блок слежения выполнен также с возможностью слежения за ориентацией элемента вставки, причем блок обеспечения изображения объекта выполнен с возможностью обеспечения изображения объекта так, чтобы его направление получения изображений зависело от прослеживаемой ориентации элемента вставки. Например, блок обеспечения изображения объекта может содержать распределения между ориентациями элемента вставки относительно целевого элемента и направлений получения изображения, причем блок обеспечения изображения объекта может быть выполнен с возможностью выбора направления получения изображения для обеспечения изображения объекта, основываясь на фактической прослеживаемой ориентации элемента вставки относительно целевого элемента и хранящихся распределениях. Эти распределения могут определяться заранее, так что изображение объекта всегда отображается в направлении получения изображения, которое оптимизируется для оказания помощи пользователю при расположении элемента вставки относительно целевого элемента.
Блок обеспечения изображения объекта и блок обеспечения изображения целевого элемента могут интегрироваться, то есть, один и тот же блок может обеспечивать изображение целевого элемента и изображение объекта. Кроме того, изображение объекта может быть изображением целевого элемента, то есть, представление целевого элемента может формироваться, основываясь на изображении объекта, и представление целевого элемента может затем показываться вместе с прослеживаемым положением элемента вставки на изображении объекта.
В варианте осуществления блок обеспечения изображения целевого элемента выполнен с возможностью обеспечения живого изображения в качестве изображения целевого элемента, блок формирования представления целевого элемента выполнен с возможностью формирования представления живого целевого элемента, представляющего целевой элемент внутри объекта в его фактическом трехмерном положении и с трехмерной ориентацией и размером, основываясь на живом изображении целевого элемента, и дисплей выполнен с возможностью отображения живого представления целевого элемента и прослеживаемого положения элемента вставки. Это позволяет пользователю получить быстрый и точный подход к целевому элементу, даже если целевой элемент движется во время процедуры вставки.
Устройство оказания помощи может дополнительно содержать блок обеспечения зоны движения для обеспечения зоны внутри объекта, только внутри которой должен перемещаться элемент вставки, причем дисплей выполнен с возможностью отображения также зоны движения. Блок обеспечения зоны движения может быть выполнен с возможностью обеспечения хранящейся зоны движения, которая была определена до того, как вводить элемент вставки, или блок обеспечения зоны движения может быть выполнен с возможностью определения зоны движения. Зона движения может рассматриваться как зона безопасности, только в которой может перемещаться элемент вставки. Например, зона движения может быть кольцеобразной или трубчатой, например, цилиндрической или образующей криволинейную трубку, в которой зона движения может быть расположена внутри сосуда и обладать такими размерами, что если элемент вставки остается в зоне движения, элемент вставки не касается внутренних стенок сосуда. Зона движения может определяться, сегментируя элементы внутри объекта в изображении объекта и/или в изображении целевого элемента и определяя запрещенную область вокруг сегментированных элементов, которые не должны сталкиваться с элементом вставки. Зона движения может помочь пользователю избежать, например, рассечений.
Блок слежения предпочтительно выполнен с возможностью слежения за положением элемента вставки, используя оптическое считывание формы. Например, оптическое считывание формы может использоваться для обеспечения четырехмерного слежения за элементом вставки в то время, когда элемент вставки перемещается к целевому элементу. Это слежение может выполняться относительно простым для пользователя способом. Например, для слежения за положением элемента вставки внутри объекта не требуются никакие дополнительные внешние поля, такие как электромагнитные поля, никакое дополнительное излучение, такое как рентгеновское излучение, и так далее.
В дополнительном варианте настоящего изобретения представлена хирургическая система для введения элемента вставки в объект, в котором хирургическая система содержит элемент вставки и устройство оказания помощи, как оно определено в п. 1 формулы изобретения.
В дополнительном варианте настоящего изобретения представлен способ оказания помощи для оказания помощи пользователю при перемещении элемента вставки внутри объекта к целевому элементу, в котором способ оказания помощи содержит этапы, на которых:
- обеспечивают целевое изображение элемента, показывающее целевой элемент, с помощью блока обеспечения изображения целевого элемента,
- формируют представление целевого элемента, представляющее целевой элемент внутри объекта в трехмерном положении, с трехмерной ориентацией и размером целевого элемента, основываясь на изображении целевого элемента, полученном блоком формирования представления целевого элемента, в котором целевой элемент содержит по меньшей мере одно отверстие, причем блок формирования представления целевого элемента формирует представление целевого элемента, содержащее по меньшей мере одно кольцо, представляющее по меньшей мере одно отверстие целевого элемента внутри объекта в трехмерном положении, с трехмерной ориентацией и размером по меньшей мере одного отверстия целевого элемента,
- прослеживают трехмерное положение элемента вставки внутри объекта посредством блока слежения, когда элемент вставки перемещается к целевому элементу, в котором прослеживаемый элемент вставки имеет по меньшей мере одно отверстие, и
- отображают посредством дисплея по меньшей мере одно кольцо представления целевого элемента и по меньшей мере одно кольцо, представляющее по меньшей мере одно отверстие элемента вставки.
В другом варианте настоящего изобретения представляется компьютерная программа оказания помощи для оказания помощи пользователю при перемещении элемента вставки внутри объекта к целевому элементу, в которой программа оказания помощи содержит средство управляющей программы, чтобы заставить устройство оказания помощи, как оно определено в п. 1 формулы изобретения, выполнять этапы способа оказания помощи, как определено в п. 13 формулы изобретения, когда программа оказания помощи работает на компьютере, управляющем устройством оказания помощи.
Следует понимать, что устройство оказания помощи по п. 1 формулы изобретения, хирургическая система по п. 12 формулы изобретения, способ оказания помощи по п. 13 формулы изобретения и компьютерная программа оказания помощи по п. 14 формулы изобретения имеют схожие и/или идентичные предпочтительные варианты осуществления, в частности, как определено в зависимых пунктах формулы изобретения.
Следует понимать, что предпочтительный вариант осуществления изобретения может также быть любой комбинацией зависимых пунктов формулы изобретения с соответствующим независимым пунктом формулы изобретения.
Эти и другие варианты изобретения станут очевидны и будут подробно объяснены со ссылкой на варианты осуществления, описанные далее.
Краткое описание чертежей
На чертежах:
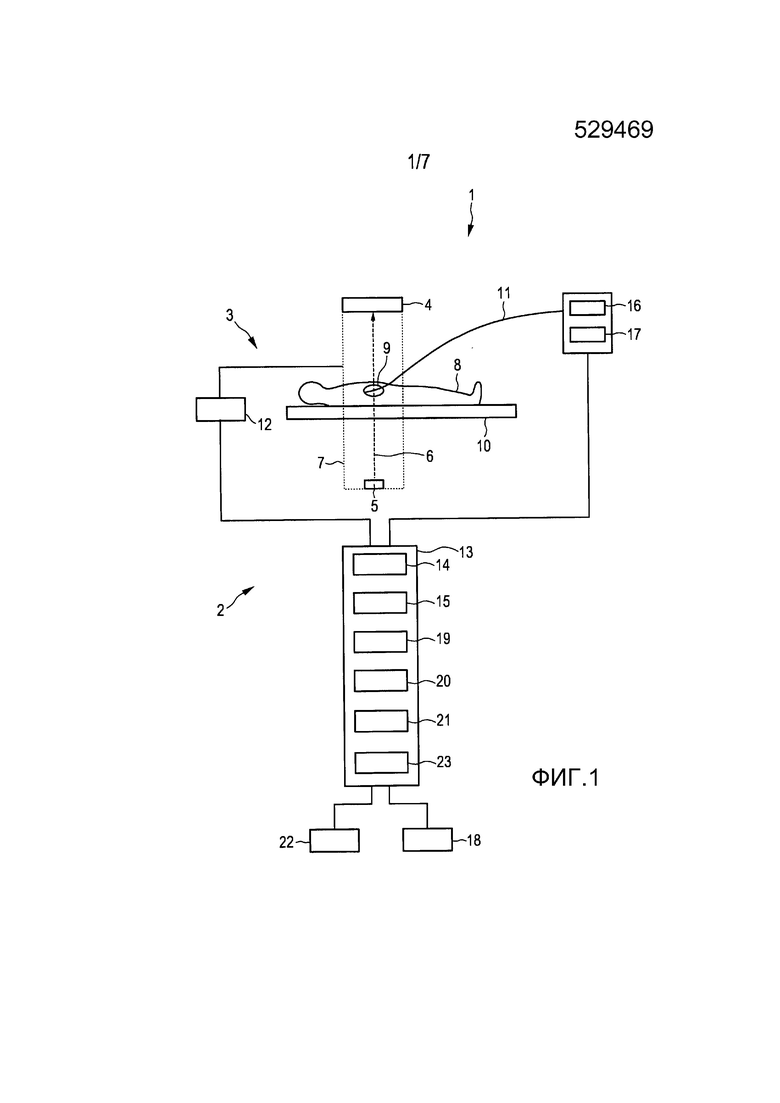
Фиг. 1 - схематичный пример варианта осуществления хирургической системы для введения элемента вставки в пациента,
Фиг. 2 - схематичный пример двух изображений объекта с представлениями целевого элемента и элемента вставки, которые должны отображаться на дисплее хирургической системы,
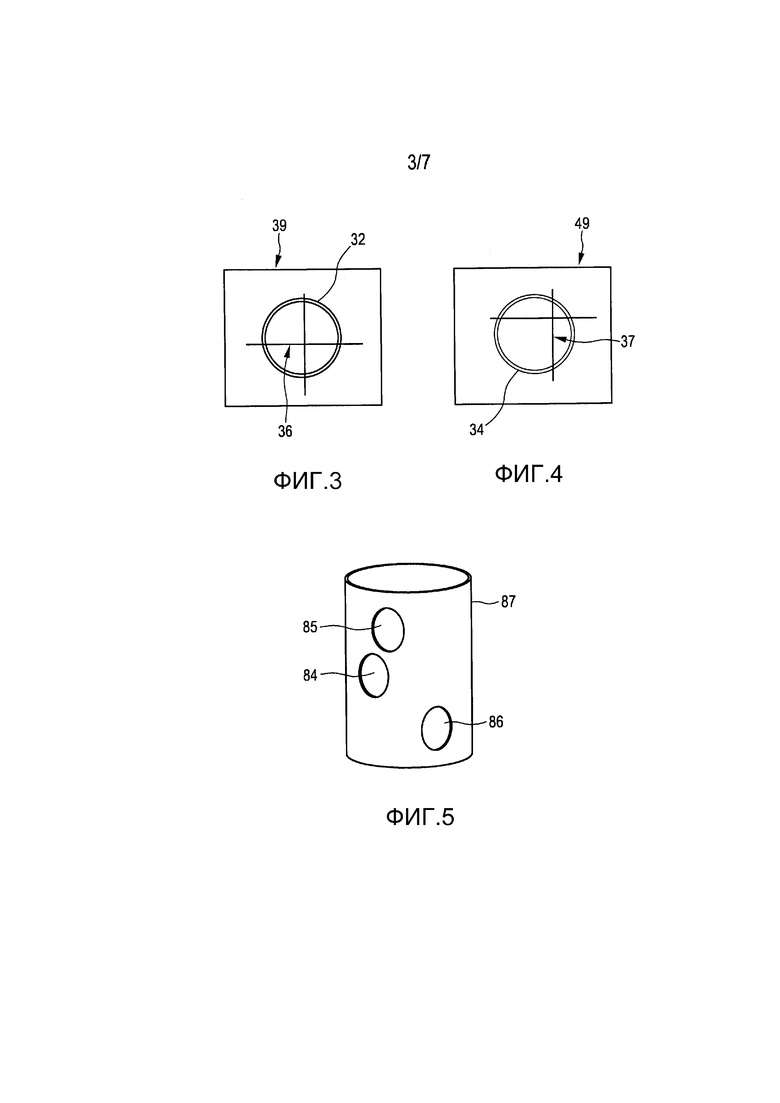
Фиг. 3 и 4 - схематичный пример положения части элемента вставки относительно кольца представления целевого элемента,
Фиг. 5 - схематичный пример варианта осуществления элемента вставки,
Фиг. 6 - схематичный пример изображения объекта с представлениями целевого элемента и элемента вставки, которые должны отображаться на дисплее хирургической системы,
Фиг. 7 и 8 - схематичный пример указателей, показывающих расстояния между целевым элементом и элементом вставки, которые должны отображаться на дисплее хирургической системы,
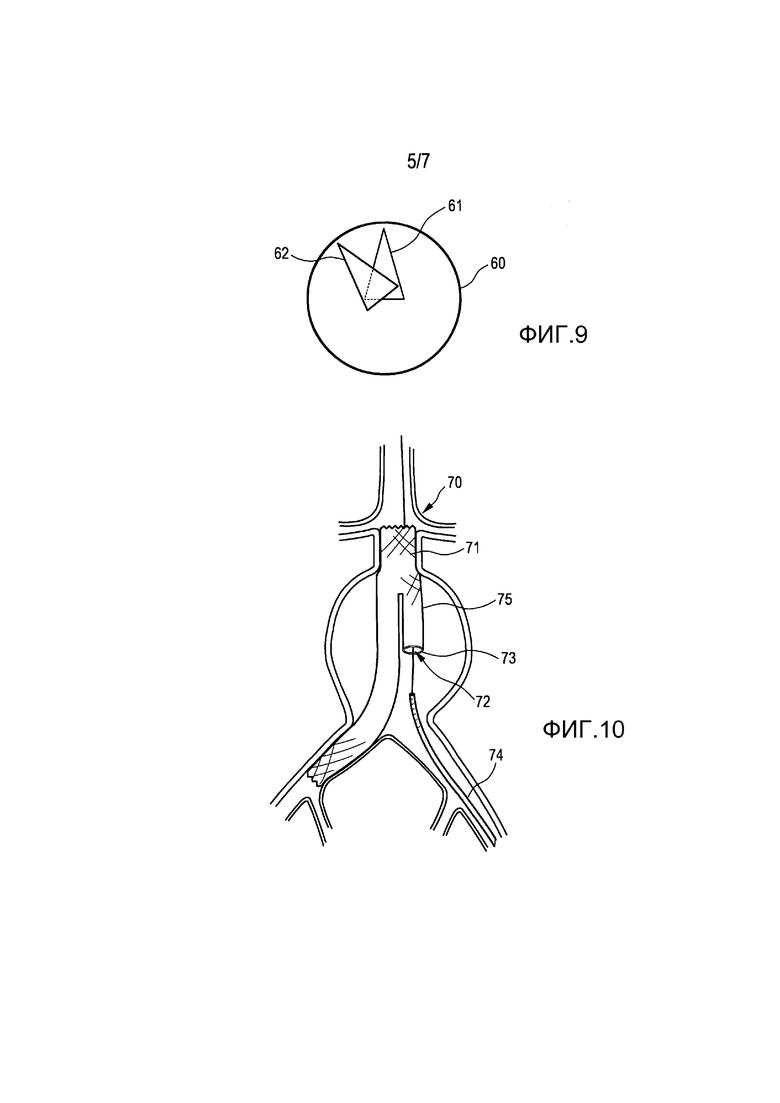
Фиг. 9 - схематичный пример указателя, показывающего ориентацию элемента вставки относительно целевого элемента, который должен отображаться на дисплее хирургической системы,
Фиг. 10 - схематичный пример эндотрансплантата внутри сосудистой структуры, в которой эндотрансплантат канюлируется, используя катетер,
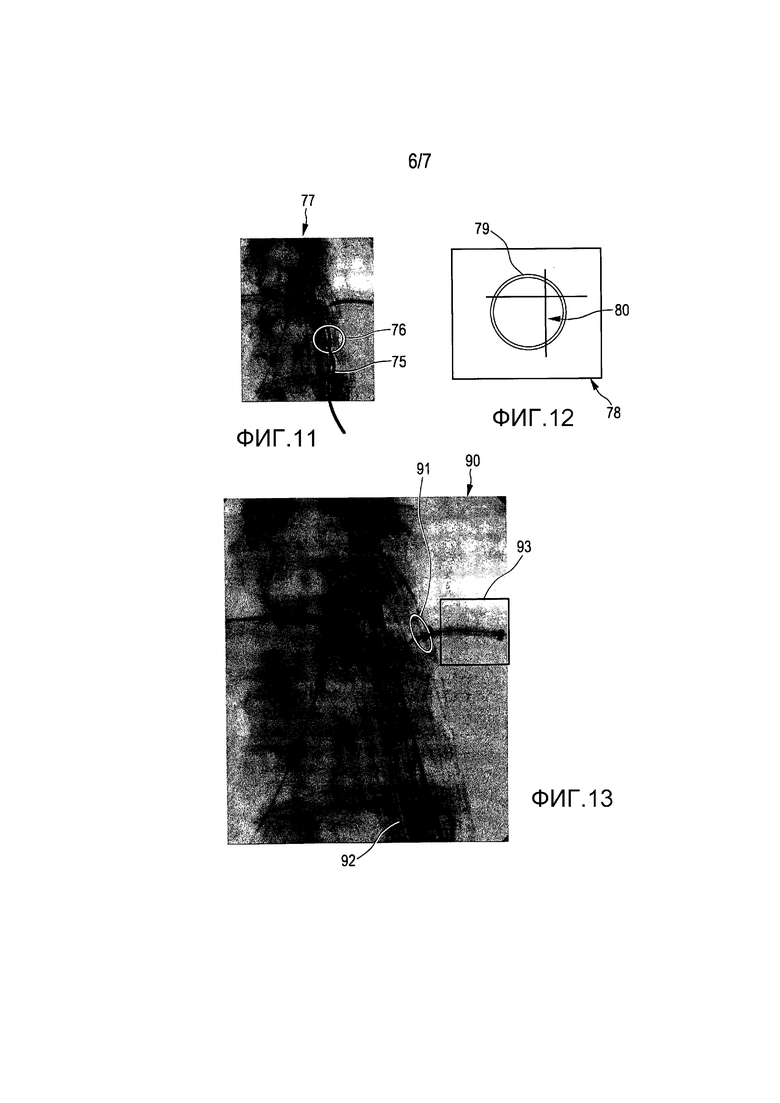
Фиг. 11 - схематичный пример изображения объекта с представлениями целевого элемента и элемента вставки, который должен отображаться на дисплее хирургической системы,
Фиг. 12 - схематичный пример указания для обозначения положения элемента вставки относительно кольца целевого элемента, которое должно отображаться на дисплее хирургической системы,
Фиг. 13 - схематичный пример изображения объекта с представлениями целевого элемента и элемента вставки и с увеличенной проекцией, на которой увеличен наконечник элемента вставки, и
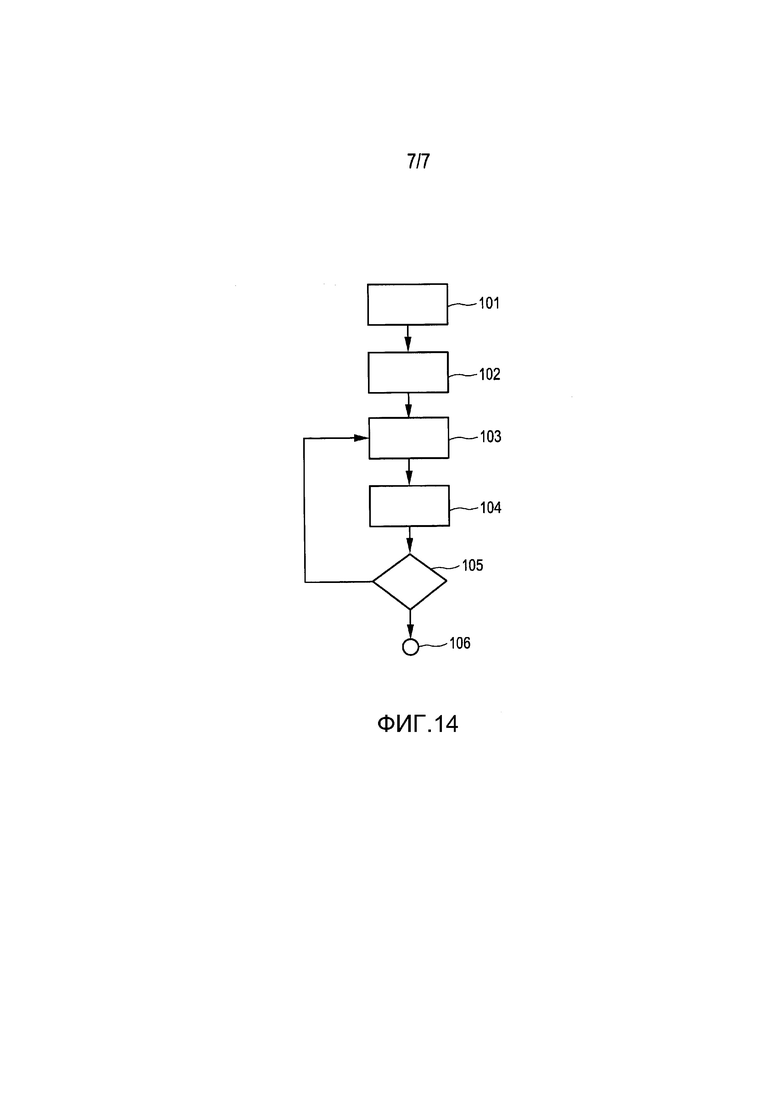
Фиг. 14 - блок-схема последовательности выполнения операций примерного варианта осуществления способа оказания помощи, чтобы помочь пользователю при перемещении элемента вставки к целевому элементу внутри пациента.
Подробное описание вариантов осуществления
На фиг. 1 схематично представлен пример варианта осуществления хирургической системы для введения элемента вставки в пациента. В этом варианте осуществления элементом вставки является катетер 11, который должен вставляться в сердце 9 пациента 8, лежащего на опорном средстве 10, таком как стол. Пользователь, такой как врач, может направлять катетер 11 внутри пациента 8, используя блок 16 управления. Блок 16 управления может позволить пользователю манипулировать катетером 11 напрямую или манипулировать катетером 11 посредством джойстика, графического интерфейса пользователя или другого средства.
Хирургическая система 1 содержит устройство 2 оказания помощи для оказания помощи пользователю при перемещении катетера 11 к целевому элементу внутри пациента 8. Устройство 2 оказания помощи содержит компьютерное устройство 13 с блоком 14 обеспечения изображения целевого элемента для обеспечения трехмерного изображения целевого элемента, отображающего целевой элемент, блок 15 формирования представления целевого элемента, формирующий представление целевого элемента, представляющее целевой элемент внутри объекта в его трехмерном положении и с трехмерной ориентацией и размером, основываясь на изображении целевого элемента. В этом варианте осуществления блок 14 обеспечения изображения целевого элемента является блоком запоминающего устройства, в котором трехмерное компьютерное томографическое изображение, показывающее целевой элемент, хранится как трехмерное изображение целевого элемента, и блок 15 формирования представления целевого элемента выполнен с возможностью формирования представления целевого элемента, сегментируя целевой элемент в предоставленном трехмерном компьютерном томографическом изображении.
Устройство 2 оказания помощи дополнительно содержит блок 17 слежения для слежения за положением элемента 11 вставки внутри пациента 8. В этом варианте осуществления блок 17 слежения выполнен с возможностью слежения за положением элемента 11 вставки при использовании оптического считывания формы. Таким образом, элемент 11 вставки содержит оптоволокно, выполненное с возможностью разрешения блоку 17 слежения определять положение элемента 11 вставки внутри пациента 8 посредством оптического считывания формы. Оптическое считывание формы может выполняться в соответствии с описанием, приведенным в документе US 7 772 541 B2, или в соответствии с другим известным оптическим способом считывания формы.
Устройство 2 оказания помощи дополнительно содержит блок 3 обеспечения изображения объекта для обеспечения изображения объекта, который в этом варианте осуществления, является фактическим изображением, по меньшей мере, части пациента 8, содержащей целевой элемент. В этом варианте осуществления блок 3 обеспечения изображения объекта является рентгеноскопическим устройством с C-образным кронштейном, содержащим рентгеновскую трубку 5 для излучения рентгеновского излучения 6, проходящего через пациента 8. Рентгеноскопическое устройство 3 дополнительно содержит рентгеновский детектор 4 для обнаружения рентгеновского излучения 6, проходящего через пациента 8. Рентгеновская трубка 5 и рентгеновский детектор 4 монтируются на C-образном кронштейне 7, способном перемещаться относительно опорного средства 10 и, таким образом, относительно пациента 8, чтобы позволить блоку 3 обеспечения изображения объекта получать фактические проекционные изображения в различных направлениях получения изображения. C-образный кронштейн 7, рентгеновская трубка 5 и рентгеновский детектор 4 управляются блоком 12 управления, который также выполнен с возможностью получения фактических изображений, основываясь на значениях обнаружения, полученных от рентгеновского детектора 4. Полученные фактические изображения являются двумерными проекционными изображениями.
Устройство 2 оказания помощи дополнительно содержит устройство 22 ввода, позволяющее пользователю вводить такие команды, как команда запуска для начала процедуры или команда остановки для остановки процедуры оказания помощи, и дисплей 18. Устройство 22 ввода может быть клавиатурой, компьютерной мышью, сенсорным экраном, и так далее. Дисплей 18 выполнен с возможностью отображения представления целевого элемента и прослеживаемого положения элемента 11 вставки на полученном фактическом изображении, то есть, в этом варианте осуществления на полученном двумерном рентгеноскопическом проекционном изображении.
В варианте осуществления целевой элемент содержит трубкообразный элемент и отверстие, то есть, целевой элемент является трубкообразным элементом с отверстием, или целевой элемент является более крупным компонентом, содержащим, помимо других элементов, трубкообразный элемент и отверстие, причем отверстие может быть отверстием трубкообразного элемента или отверстием другого элемента целевого элемента. Например, целевой элемент может содержать сосуд с отверстием. Блок 15 формирования представления целевого элемента может тогда быть выполнен с возможностью формирования представления целевого элемента, содержащего кольцо, имеющее трехмерное положение, трехмерную ориентацию и размер, соответствующие трехмерному положению, трехмерной ориентации и размеру отверстия. Например, целевой элемент может содержать отверстие почечной артерии и блок 15 формирования целевого элемента может быть выполнен с возможностью формирования кольца, имеющего размер, положение и ориентацию, которые соответствуют отверстию почечной артерии. Блок 15 формирования представления целевого элемента может также быть выполнен с возможностью формирования представления целевого элемента, содержащего цилиндр, имеющий трехмерное положение, трехмерную ориентацию и размер, которые соответствуют трехмерному положению, трехмерной ориентации и размеру трубкообразного элемента целевого элемента. Кроме того, блок 15 формирования представления целевого элемента может быть выполнен с возможностью формирования представления целевого элемента, содержащего указатель, показывающий центр кольца, имеющего трехмерное положение, трехмерную ориентацию и размер, соответствующие трехмерному положению, трехмерной ориентации и размеру отверстия целевого элемента.
Целевой элемент может также содержать несколько отверстий, причем в этом случае блок 15 формирования представления целевого элемента может быть выполнен с возможностью формирования представления целевого элемента, содержащего несколько колец, представляющих несколько отверстий целевого элемента внутри пациента 8 в трехмерном положении, с трехмерной ориентацией и размером отверстий целевого элемента.
Дисплей 18 выполнен с возможностью отображения соответствующего представления целевого элемента и соответствующего прослеживаемого положения элемента вставки на соответствующем фактическом изображении пациента 8. На фактическом изображении представление целевого элемента отображается, по меньшей мере, таким образом, что это отображение представления целевого элемента соответствует трехмерному положению, трехмерной ориентации и размеру представления целевого элемента, чтобы позволить пользователю извлечь эту трехмерную информацию из отображения представления целевого элемента на фактическом изображении. Этот отображение выполняется таким образом, что пользователь может видеть трехмерное положение, трехмерную ориентацию и размер представления целевого элемента относительно элемента вставки на фактическом изображении, в этом примере являющемся изображением объекта. Например, дисплей 18 может быть выполнен с возможностью фактического проецирования определенного представления целевого элемента на изображение объекта с учетом геометрии получения изображения, используемой для формирования изображения объекта. Кроме того, прослеживаемое трехмерное положение элемента вставки может быть спроецировано на двумерное изображение объекта таким образом, чтобы визуализировать трехмерную пространственную связь между целевым элементом и элементом вставки на изображении объекта.
Отображение представления целевого элемента и прослеживаемого положения элемента вставки на соответствующем реальном изображении ниже будет показано дополнительно со ссылкой на фиг. 2, 6, 11 и 13.
Блок 3 обеспечения изображения объекта может быть выполнен с возможностью получения двумерных изображений объекта по меньшей мере в двух направлениях получения изображений, которые могут быть перпендикулярны друг другу. Такие два изображения объекта 30, 31 являются примерными и схематично показаны на фиг. 2. На фиг. 2 представление 38 целевого элемента содержит два кольца 32, 33 и цилиндр 34, причем на левом изображении 30 объекта также отображается цилиндр 34, а на правом изображении 31 объекта отображаются только два кольца 32, 34, потому что направление получения для правого изображения 31 объекта параллельно продольной оси цилиндра 34. Также прослеживаемое положение элемента вставки, как оно определено посредством оптического считывания формы, указывается на изображениях 30, 31 объекта линией 35. В этом примере два изображения 30, 31 объекта могут быть заранее полученными изображениями объекта или одно изображение объекта может быть заранее полученным изображением объекта, а другое изображение объекта может быть фактическим живым изображением объекта. Два изображения 30, 31 объекта вместе с представлением целевого элемента и трехмерным положением элемента вставки могут рассматриваться как формирующие реальную двухпроекционную проекцию, в которой положение элемента вставки, в частности, линия 35, может быть показано на трехмерной живой проекции на обоих изображениях объекта одновременно с представлением целевого элемента. В этой виртуальной концепции одна моноплановая проекционная система, то есть, блок 3 обеспечения одноплоскостного изображения объекта, может получить, например, два проекционных изображения, причем проекция, даваемая системой, может быть подобна проекции двухплоскостной системы, подобной истинной физической двухплоскостной системе с С-образным кронштейном.
Устройство 2 оказания помощи дополнительно содержит блок 19 определения спроецированного положения для определения положения элемента вставки, спроецированного на кольцевую плоскость, определяемую соответствующим кольцом 32, 34, причем дисплей 18 также выполнен с возможностью отображения спроецированного положения элемента вставки внутри плоскости 39, 49 кольца вместе с кольцом 32, 34, как схематично и примерно показано на фиг. 3 и 4. На этих чертежах спроецированное положение отмечено крестами 36 и 37, соответственно. Если наконечник элемента вставки еще не прошел соответствующее кольцо 32, 34, спроецированное положение элемента вставки предпочтительно является спроецированным положением наконечника элемента вставки. Если наконечник элемента вставки уже прошел соответствующее кольцо 32, 34, как схематично и примерно показано на фиг. 2, спроецированные положения, отмеченные на фиг. 3 и 4 крестами 36, 37, являются положениями соответствующей части элемента вставки в соответствующей плоскости 39, 49 кольца, как определено оптическим считыванием формы. Кресты 36, 37 могут рассматриваться как перекрестия линий, которые дополнительно помогают пользователю при проведении элемента вставки через целевой элемент.
В варианте осуществления целевой элемент может быть сосудом с несколькими боковыми отверстиями и элемент вставки может быть стентом, имеющим соответствующие боковые отверстия, причем стент должен располагаться внутри сосуда, используя, например, катетер 11, так чтобы отверстия стента совпадали с отверстиями сосуда. На фиг. 5 схематично и примерно показаны такой стент 87 с отверстиями 84, 85 и 86. На фиг. 6 схематично и примерно показаны представление 48 целевого элемента с тремя кольцами 41, 42, 43, представляющее три отверстия сосуда, и три кольца 44, 45, 46, указывающие положения отверстий стента, как они определены при оптическом считывании формы на изображении 40 объекта. В частности, размеры отверстий 84, 85 и 86 стента 87 и ориентации и положения этих отверстий 84, 85 и 86 относительно стента 87 могут быть определены с помощью рентгеновских проекционных изображений, показывающих стент 87, которые могут обеспечиваться блоком 3 обеспечения изображения объекта, то есть, описанной выше рентгеновской системой с C-образным кронштейном. В частности, признаки отверстий стента могут вручную или автоматически извлекаться из двух или более рентгеновских проекционных изображений, которые соответствуют различным направлениям получения изображений и которые показывают стент 87 с отверстиями 84, 85 и 86, причем эти извлеченные признаки могут использоваться для определения размера и трехмерного положения и ориентации колец 84, 85 и 86 относительно трехмерного положения и ориентации стента 87, так что основываясь на этих пространственных соотношениях и прослеживаемом трехмерном положении и трехмерной ориентации стента 87, могут быть определены трехмерное положение и трехмерная ориентация колец 84, 85 и 86. Например, извлеченные признаки могут быть маркерами вокруг соответствующего отверстия, которые могут быть извлечены, в частности, извлечены автоматически, при использовании алгоритма поддержки стента, как, например, описано в документе WO 2005104951 A1, в котором эти маркеры могут затем использоваться для определения размеров и ориентаций и положений отверстий 84, 85 и 86 относительно трехмерного положения и ориентации стента. Результирующее трехмерное представление этих колец 84, 85 и 86 может быть показано на дисплее 18. Когда пользователь перемещает стент внутри пациента, кольца 44, 45, 46 соответственно перемещаются на дисплее 18, как определяется посредством оптического считывания формы, так что пользователь может правильно расположить стент 87, если перемещает стент таким образом, что кольца 44, 45, 46 совпадают с кольцами 41, 42, 43 на дисплее 18.
Устройство 2 оказания помощи дополнительно содержит блок 20 определения расстояния для определения расстояния между целевым элементом и элементом вставки, основываясь на сформированном представлении 48 целевого элемента и прослеживаемом положении элемента 87 вставки, причем дисплей 18 также выполнен с возможностью отображения определенного расстояния. Это показано на фиг. 7 и 8. На фиг. 7 показана линия 52, символизирующая нулевое расстояние между желаемым положением стента 87 и фактическим положением стента 87, и штанга 51 с наконечником 53 указывает расстояние до желаемого конечного положения стента и требуемое направление перемещения стента. В этом примере наконечник 53 штанги 51 указывает направление движения вперед. Если стент 87 был перемещен слишком далеко, это может быть указано так, как схематично и примерно показано на фиг. 8, где наконечник 54 штанги 50 указывает в направлении, противоположном направлению, в котором указывает наконечник 53 штанги 51 на фиг. 7. В дополнение к показанному расстоянию до конечного желаемого положения стента 87, как показано на фиг. 7 и 8, расстояние может также явно отображаться на дисплее 18, то есть, оно может отображаться как расстояние между фактическим положением стента 87 и желаемым конечным положением стента 87, например, как +2 мм или -3 мм.
Блок 17 слежения предпочтительно также выполнен с возможностью слежения за ориентацией элемента вставки внутри пациента 8 и устройство 2 оказания помощи предпочтительно дополнительно содержит блок 21 определения ориентации для определения ориентации элемента вставки относительно целевого элемента, основываясь на сформированном представлении целевого элемента и прослеживаемой ориентации элемента вставки, причем дисплей 18 может также быть выполнен с возможностью отображения определенной ориентации. Например, со ссылкой на фиг. 5 и 6, блок 21 определения ориентации может определять ориентацию отверстий 84, 85, 86 стента 87 в круговом направлении стента 87 относительно положений отверстий 41, 42, 43 представления целевого элемента 48. Эта ориентация может показываться на дисплее 18, как схематично и примерно показано на фиг. 9. На фиг. 9 треугольник 61 внутри круга 60 указывает правильное желаемое угловое положение стента и треугольник 62 указывает фактическое угловое положение стента, то есть, фактическое угловое положение отверстий 44, 45, 46 в круговом направлении стента 87. Если пользователь изменяет это угловое положение стента 87, то это напрямую будет показано соответствующим угловым перемещением треугольника 62. Таким образом, пользователь может вращать стент 87 таким образом, чтобы его угловое положение совпало с конечным желательным угловым положением, используя дисплей угловых положений, как показано на фиг. 9.
Таким образом, пользователь может начать введение эндотрансплантата 87, представленного виртуальными кольцами 44, 45 и 46 в положениях, схематично и примерно показанных на фиг. 6, чтобы медленно смещать эндотрансплантат 87 в положение и ориентацию, схематично и примерно указанные кольцами 41, 42 и 43 на фиг. 6, которые представляют желаемое конечное положение и ориентацию эндотрансплантата 87. Если кольца 44, 45 и 46 совпадают с кольцами 41, 42 и 43, это указывает пользователю, что исходные отверстия 84, 85, 86 эндотранспланта совпадают с отверстиями в сосуде. Следует заметить, что фиг. 6 является просто схематическим чертежом для иллюстрации концепции отображения представления целевого элемента 48 и прослеживаемого положения 44, 45, 46 элемента вставки, которым в этом примере является эндотрансплантат, то есть, например, при реальном применении кольца могут иметь другой размер.
В варианте осуществления, когда стент приближается к целевому элементу, который может наблюдаться посредством слежения с использованием оптического считывания формы, которое может также называться как получение изображения с использованием оптического считывания формы, параметры перемещения и вращения могут альтернативно или дополнительно быть получены при использовании алгоритма разложения единого значения, причем положение стента, прослеживаемое посредством оптического считывания формы, может использоваться в качестве инициализации или ограничения пространства решений алгоритма разложения единого значения. Алгоритм разложения единого значения, который может выполняться блоком определения расстояния и/или блоком определения ориентации, может быть применен к первому набору точек, определяющему положения отверстий сосуда, в частности, определяющему положения ориентиров вокруг отверстий сосуда, которые могут быть получены из изображения целевого элемента, и ко второму набору точек, определяющему положения отверстий стента, в частности, определяющему положения ориентиров вокруг отверстий стента, которые могут быть получены из живых изображений, подобных живым рентгеновским проекционным изображениям. Результатом этого применения алгоритма разложения единого значения является матрица 4x4, обеспечивающая информацию о прямолинейном перемещении и вращении, являющаяся показателем остающегося прямолинейного движения и вращения стента, требующихся для формирования наилучшего совпадения между отверстиями сосуда и отверстиями стента. Эти остающиеся прямолинейное движение и вращение могут быть вычислены и показаны на дисплее в реальном времени, в частности, как показано на фиг. 7-9.
Представленное на фиг. 6 изображение объекта является трехмерным сегментированным изображением сосуда. Однако, в других вариантах осуществления изображение объекта, на котором отображаются представление целевого элемента и прослеживаемое положение, например, соответствующих колец, может быть другим видом изображения, таким как реальное двумерное проекционное изображение, двумерное поперечное сечение трехмерного компьютерного томографического изображения, виртуальное двумерное проекционное изображение, определяемое виртуальным прямым проецированием изображения объекта, который может быть моделью объекта, и так далее. Кроме того, изображение объекта может быть изображением, которое было получено перед хирургической процедурой или во время хирургической процедуры. Дополнительно, целевой элемент и прослеживаемое положение, то есть, например, соответствующие кольца, могут отображаться одновременно на нескольких изображениях объекта, таких как различные двумерные проекционные изображения, которые соответствуют различным направлениям получения изображений.
Устройство 2 оказания помощи дополнительно содержит блок 23 обеспечения зоны движения для обеспечения зоны внутри объекта, в пределах только которой должен перемещаться элемент вставки, причем дисплей 18 также выполнен с возможностью отображения зоны движения. В этом варианте осуществления зона движения является зоной безопасности, в которой элемент вставки должен управляться таким образом, чтобы он оставался в пределах зоны безопасности. Блок 23 обеспечения зоны движения может быть выполнен с возможностью обеспечения уже хранящейся зоны движения или может быть выполнен с возможностью определения зоны движения в зависимости, например, от изображения целевого элемента и/или от изображения объекта. В частности, элемент, видимый в изображении целевого элемента или в изображении объекта, может быть сегментирован и зона движения может быть определена так, что сегментированный элемент и область вокруг сегментированного элемента исключаются из зоны движения. Например, сегментированный элемент может быть внутренней стенкой сосуда и зона движения может определяться так, чтобы располагаться внутри сосуда и с некоторым расстоянием до внутренней стенки сосуда, чтобы избежать касания стенок вдоль всего элемента вставки во время движения к целевому элементу. Это может уменьшить вероятность нежелательных рассечений.
На фиг. 10 схематично и для примера показана катетеризация контралатеральной конечности эндотрансплантата 71 внутри структуры 70 сосуда. В этом примере целевой элемент 73 является кольцом, окружающим отверстие 72 конечности 75 эндотрансплантата 71. На фиг. 11 схематично и для примера показаны представление 76 целевого элемента, являющееся кольцом, отображаемым на фактическом изображении 77 в его трехмерном положении, с трехмерной ориентацией и размером, соответствующим трехмерному положению, трехмерной ориентации и размеру кольца 73, окружающего отверстие конечности 75 эндотрансплантата 71. Также на фактическом изображении 77 показана линия 75, указывающая катетер 74. На фиг. 12 показано положение части катетера 74, пересекающей плоскость 78 кольца, определяемую кольцом 73, причем на фиг. 12 кольцо указывается кругом 79 и положение части катетера 74 внутри кольца 73 указывается крестом 80.
Рентгеновская система 3 с C-образным кронштейном может быть выполнена с возможностью обеспечения изображений объекта, соответствующих различным направлениям получения изображений, в частности, перпендикулярным направлениям получения изображений. Например, она может быть выполнена с возможностью обеспечения левого переднего наклонного изображения, правого переднего наклонного изображения, изображения черепа и/или изображения каудальной части, например, целевого сосуда. Если целевым элементом является целевой сосуд, рентгеновская система 3 с C-образным кронштейном также может быть выполнен с возможностью обеспечения изображения поперечного сечения объекта, показывающего целевой сосуд. Для получения изображения проекции поперечного сечения объекта, показывающего целевой сосуд, C-образный кронштейн перемещается в ориентацию, являющуюся "иллюминатором" трубки, образованной целевым сосудом, причем направление получения изображения, по существу, является выровненным с осью целевого сосуда.
Блок 17 слежения предпочтительно также выполнен с возможностью слежения за ориентацией элемента вставки, причем блок 3 обеспечения изображения объекта, то есть, в этом варианте осуществления рентгеновская система 3 с C-образным кронштейном, выполнен с возможностью обеспечения изображения объекта таким образом, что его направление получения изображения зависит от прослеживаемой ориентации элемента вставки.
Если представление целевого элемента содержит несколько элементов, таких как два кольца 32, 33, показанных на фиг. 2, блок 2 обеспечения изображения объекта может быть выполнен таким образом, что если элемент вставки приближается к первому кольцу 32, то показывается изображение объекта, которое позволяет пользователю точно канюлировать первое кольцо 32, и отображать изображение объекта, которое позволяет пользователю точно канюлировать второе кольцо 33, если элемент вставки пересек первое кольцо 32 и приближается ко второму кольцу 33. Например, если элемент вставки приближается к первому кольцу 32, блок 3 обеспечения изображения объекта может обеспечить изображение объекта, имеющее направление получения изображения, по существу, перпендикулярное плоскости кольца, определяемой первым кольцом 32, и если элемент вставки приближается ко второму кольцу 33, то блок 3 обеспечения изображения объекта может показывать изображение объекта, имеющее направление получения изображения, по существу, перпендикулярное плоскости кольца, определяемой вторым кольцом 33. Таким образом, C-образный кронштейн может следить за ориентацией устройства оптического считывания формы, чтобы наилучшим образом канюлировать первое кольцо 32 и затем автоматически изменять установку угла, чтобы провести оптимизацию для наилучшей катетеризации второго кольца 33, то есть, C-образный кронштейн и целевые элементы могут синхронизироваться посредством оптического считывания формы в пространстве и во времени. Зависимость соответствующего направления получения изображения на соответствующей ориентации оптического считывания формы может быть заданной, в частности, заданной пользователем в соответствии с предпочтением пользователя. Например, зависимость может задаваться таким образом, что направление получения изображения ограничивается соответствующим углом плоскости кольца, например, 45°.
Блок 3 обеспечения изображения объекта может быть выполнен с возможностью обеспечения одиночного двумерного рентгеноскопического изображения, кинематографического двумерного рентгеноскопического изображения, двух двумерных рентгеноскопических изображений для обеспечения двухплоскостной проекции, более чем двух двумерных рентгеноскопических изображений, и так далее. Однако, блок обеспечения изображения объекта может также быть выполнен с возможностью обеспечения фактического трехмерного изображения, в частности, живого трехмерного изображения, которое может обеспечиваться блоком получения ультразвукового изображения. Кроме того, вместо обеспечения фактического изображения для обеспечения анатомического контекста может быть также показано более старое изображение, причем на этом более старом изображении могут быть показаны представление целевого элемента и индикация, указывающая элемент вставки. Дополнительно, анатомический контекст может также обеспечиваться другим путем. Например, вместе с представлением целевого элемента и представлением элемента вставки для обеспечения анатомического контекста может отображаться план действий. План действий может быть определен заранее, сегментируя структуру сосуда на трехмерном изображении пациента, которое может быть компьютерным томографическим изображением или изображением, полученным с помощью магнитного резонанса.
Хотя в варианте осуществления, описанном выше со ссылкой на фиг. 1, блок обеспечения изображения объекта выполнен с возможностью обеспечения рентгеноскопического изображения пациента 8, которое предпочтительно содержит элемент вставки, в частности, наконечник элемента вставки, блок обеспечения изображения объекта может также быть выполнен с возможностью использования другой методики получения изображения для обеспечения фактического изображения, такой как использование блока получения ультразвукового изображения.
Блок обеспечения изображения объекта может быть выполнен с возможностью обеспечения фактического изображения только той части пациента, которая содержит прослеживаемое положение элемента вставки, в частности, прослеживаемое положение наконечника элемента вставки. Например, коллиматоры рентгеноскопической системы с C-образным кронштейном, описанной выше со ссылкой на фиг. 1, могут быть выполнены с возможностью фокусировки рентгеновских лучей 6 на область внутри пациента, содержащую прослеживаемое положение элемента вставки. Такая фокусировка излучения на эту область может выполняться автоматически или вручную на основе соответствующего прослеживаемого положения элемента вставки. Чтобы позволить блоку обеспечения изображения объекта обеспечивать фактическое изображение области, содержащей элемент вставки, основываясь на прослеживаемом положении элемента вставки, может быть реализован автоматический контур обратной связи. Такая фокусировка излучения на этой области может уменьшить рентгеновское излучение, получаемое пациентом. Если в другом варианте осуществления вместо или в дополнение к рентгеноскопической системе с C-образным кронштейном будет использоваться другая методика получения изображения для обеспечения изображения объекта, такая как компьютерная томографическая система, трехмерная ультразвуковая система, система магнитно-резонансной томографии и так далее, то к этим методикам получения изображения может применяться концепция фокусировки, например, на наконечнике или на любой желаемой части элемента вставки, позволяющая использование считывания оптической формы.
В варианте осуществления дисплей выполнен с возможностью отображения части фактического изображения, которая содержит прослеживаемое положение элемента вставки, в частности, прослеживаемое положение наконечника элемента вставки, который в увеличенном представлении схематично и в качестве примера показан на фиг. 13. Как можно видеть на фиг. 13, представление 91 целевого элемента и линия, указывающая элемент 92 вставки, могут отображаться на фактическом изображении 90, причем наконечник элемента вставки в этом варианте осуществления является катетером, показанным в увеличенном виде 93.
Далее вариант осуществления способа оказания помощи для оказания помощи пользователю при перемещении элемента вставки внутри объекта к целевому элементу будет описан в качестве примера со ссылкой на блок-схему последовательности выполнения операций, показанную на фиг. 14.
На этапе 101 блок 14 обеспечения изображения целевого элемента обеспечивает трехмерное изображение целевого элемента, которое показывает целевой элемент. На этапе 102 представление целевого элемента, представляющее целевой элемент внутри объекта в трехмерном положении, с трехмерной ориентацией и размером целевого элемента, формируется, основываясь на изображении целевого элемента блоком 15 формирования представления целевого элемента 15. На этапе 103 блок 17 слежения прослеживает положение элемента вставки внутри объекта и на этапе 104 представление целевого элемента и прослеживаемое положение элемента вставки показываются на дисплее 18. На этапе 105 определяется, выполняется ли критерий исключения, причем, если критерий исключения не выполняется, способ оказания помощи продолжается на этапе 103. В противном случае способ оказания помощи заканчивается на этапе 106. Критерий исключения может быть, например, таким, как ввел ли пользователь команду исключения в систему, используя устройство 22 ввода, или достиг ли элемент вставки целевого элемента.
Система, описанная выше со ссылкой на фиг. 1, может быть выполнена с возможностью расположения и, вероятно, определения размера трехмерного кольца на изображении как основной цели анатомии, то есть, как целевого элемента. Эта основная цель анатомии может быть, например, отверстием почечной артерии, которое может представляться как трехмерное кольцо диаметром, например, 8 мм в точном положении и под углом в отверстии. Положение и размер могут быть получены посредством компьютерного томографического сканирования пациента, которые могут обеспечиваться как изображение целевого элемента и которые могут сегментироваться. Изображение целевого элемента может регистрироваться в изображении в реальном времени, то есть, на фактическом изображении объекта, например, посредством рентгеноскопии или оптического считывания формы.
Блок обеспечения изображения целевого элемента, блок обеспечения изображения объекта, то есть, в описанном выше варианте осуществления рентгеновская система с C-образным кронштейном и блок слежения регистрируются относительно друг друга. Регистрация между этими различными компонентами может выполняться несколькими способами. Например, если блок обеспечения изображения целевого элемента выполнен с возможностью обеспечения трехмерного компьютерного томографического изображения целевого элемента и если блок обеспечения изображения объекта выполнен с возможностью обеспечения двух или более двумерных рентгеновских проекционных изображений в качестве изображений объекта, блок обеспечения изображения целевого элемента и блок обеспечения изображения объекта могут регистрироваться относительно друг друга, выполняя известную двумерную-трехмерную регистрацию. Если блок обеспечения изображения объекта выполнен с возможностью обеспечения внутреннего хирургического компьютерного томографического изображения, компьютерное томографическое изображение целевого элемента может регистрироваться вместе с компьютерным томографическим изображением объекта, используя, например, процедуры точечного согласования или процедуры объемного согласования. Кроме того, блок слежения может регистрироваться вместе с блоком обеспечения изображения объекта, определяя положение элемента вставки в изображении объекта и также определяя это положение посредством блока слежения. Блок слежения затем также регистрируется блоком обеспечения изображения целевого элемента, если блок обеспечения изображения целевого элемента регистрируется блоком обеспечения изображения объекта. Блок слежения может также регистрироваться напрямую блоком обеспечения изображения целевого элемента, например, обнаруживая форму определенных сосудов, показанных в изображении целевого элемента, и совпадение этих форм с прослеживаемой формой элемента вставки, когда элемент вставки вводится в эти сосуды.
Устройство оказания помощи, описанное выше со ссылкой на фиг. 1, обеспечивает соответствующую и значимую информацию канюлирования, например, почечной артерии, как простое трехмерное кольцо на хирургическом двумерном рентгеновском изображении. Прослеживаемое хирургическое устройство, то есть, элемент вставки, затем приближается, чтобы достигнуть целевого элемента, причем для прослеживаемого хирургического устройства может отображаться упрощенное представление простого перекрестья в виде "значка", с которым предстоит встреча внутренней части кольца. Слежение хирургического устройства предпочтительно выполняется посредством оптического считывания формы. Трехмерное кольцо может быть увеличено как цилиндр, чтобы предложить информацию о длине или глубине целевой артерии для оптимизации безопасности катетеризации и оказания должным образом помощи, например, посредством ангиопластического баллона или стента соответствующего размера.
Устройство оказания помощи дополнительно может быть выполнено с возможностью разрешения виртуального двухплоскостного варианта осуществления в качестве анатомии, которая может визуализироваться с помощью формирователя изображения, то есть, блока обеспечения изображения объекта, с двух или более точек зрения, например, в левом переднем наклонном направлении и правом переднем наклонном направлении. Контекст простых рентгеновских изображений может предоставлять врачу контекст, который он или она привык использовать. Индикация хирургического устройства и одно или несколько колец представления целевого элемента предпочтительно накладываются в трех измерениях и напрямую на все просматриваемые изображения, то есть, на все изображениях, используемые для обеспечения анатомического контекста. Это предоставляет простой и все еще интуитивный и мощный вариант осуществления, чтобы помочь врачу войти в контакт с целью, уменьшая, таким образом, количество проб и ошибок, экономя время и уменьшая ненужные излучение и контрастность.
Устройство оказания помощи, описанное выше со ссылкой на фиг. 1, предпочтительно выполнено с возможностью использования во время процедуры эндоваскулярного лечения аневризмы (EVAR).
Устройство оказания помощи может быть выполнено с возможностью определения нескольких представлений целевого элемента для нескольких целевых элементов и разрешения пользователю выбрать одно или несколько из представлений целевого элемента для отображения на дисплее. Например, устройство оказания помощи может быть выполнено с возможностью предоставления раскрывающегося меню, чтобы позволить пользователю выбирать желаемое представление целевого элемента. Это может позволить пользователю сосредоточиться только на определенном целевом элементе, например, на правой почечной артерии, потому что только представление целевого элемента, определенное для этого соответствующего целевого элемента, может быть показано на дисплее, а другие представления целевых элементов, определенных для других целевых элементов, то есть, другие представления целевых элементов могут быть скрыты.
Хотя в описанных выше вариантах осуществления блок обеспечения изображения целевого элемента выполнен с возможностью обеспечения нескольких двумерных изображений целевого элемента или трехмерного изображения целевого элемента, в других вариантах осуществления блок обеспечения изображения целевого элемента может быть также выполнен с возможностью обеспечения четырехмерного изображения целевого элемента, то есть, динамического трехмерного изображения целевого элемента. Например, блок обеспечения изображения целевого элемента может быть выполнен с возможностью обеспечения кардиального и респираторного стробированных заранее полученных трехмерных изображений в качестве четырехмерного изображения целевого элемента или живого трехмерного изображения в качестве изображения целевого элемента. В этих случаях блок формирования представления целевого элемента может быть выполнен с возможностью формирования динамического представления целевого элемента, которое можно показывать на дисплее вместе с прослеживаемым положением элемента вставки, как вариант, на изображении объекта для предоставления некоторой анатомической информации. Также блок обеспечения изображения объекта может быть выполнен с возможностью обеспечения динамического трехмерного изображения.
Хотя в описанных выше вариантах осуществления блок обеспечения изображения целевого элемента выполнен с возможностью обеспечения одного или нескольких изображений целевого элемента по той же самой методике получения изображения, в другом варианте осуществления блок обеспечения изображения целевого элемента может быть выполнен с возможностью обеспечения изображения по другим методикам получения изображения или изображений по методике получения объединенных изображений в качестве изображений целевого элемента, причем блок формирования представления целевого элемента может быть выполнен с возможностью формирования представления целевого элемента, основываясь на изображениях целевого элемента, полученных по различным или объединенным методикам получения изображения. Эти различные или объединенные методики получения изображения могут содержать по меньшей мере две из таких методик, как получение рентгеновских проекционных изображений, получение изображений компьютерной томографии, получение изображений магнитно-резонансной томографии, получение ультразвуковых изображений и так далее, причем соответствующее изображение по соответствующей методике получения изображения может быть двумерным изображением, трехмерным изображением или четырехмерным изображением. Кроме того, блок обеспечения изображения объекта может быть выполнен с возможностью обеспечения несколько изображений объекта, полученных по различным или объединенным методикам получения изображения, причем представление целевого элемента и прослеживаемое положение элемента вставки могут отображаться на нескольких изображениях объекта, полученных по различным или объединенным методикам получения изображения.
Хотя в вышеупомянутых описанных вариантах осуществления блок формирования представления целевого элемента выполнен с возможностью формирования представления целевого элемента, содержащего кольцо, в других вариантах осуществления блок формирования представления целевого элемента может быть выполнен с возможностью формирования представления целевого элемента, содержащего другой элемент, такой как куб, сфера и так далее, имеющий такие размеры, ориентацию и положение, которые соответствуют размерам, ориентации и положению целевого элемента, который в этом случае имеет, по существу, форму куба, сферы и так далее.
Хотя в описанном выше варианте осуществления элемент вставки является стентом, имеющим три отверстия, элемент вставки может также быть стентом, имеющим только одно отверстие, два отверстия или более чем три отверстия. Кроме того, элемент вставки может также быть другим элементом, в частности, другим элементом вставки, имеющим одно или более отверстий. В варианте осуществления одиночное кольцо представления целевого элемента может отображаться вместе с одиночным кольцом, представляющим одиночное отверстие элемента вставки, такого стент с отверстиями.
Другие изменения в раскрытых вариантах осуществления могут стать понятны и осуществляться специалистами в данной области техники при практической реализации заявленного изобретения, исходя из изучения чертежей, раскрытия и приложенной формулы изобретения.
В формуле изобретения слово "содержащий" не исключает другие элементы или этапы и единственное число не исключает множественное число.
Единый блок или устройство могут выполнить функции нескольких позиций, описанных в формуле изобретения. Простой факт, что некоторые критерии описываются во взаимно различных зависимых пунктах формулы изобретения, не указывает, что объединение этих критериев не может использоваться для достижения преимущества.
Такие операции, как формирование представления целевого элемента, определение расстояния между целевым элементом и элементом вставки, определение ориентации элемента вставки относительно целевого элемента и так далее, выполняемые одним или несколькими блоками или устройствами, могут выполняться любым другим количеством блоков или устройств. Эти операции и/или управление устройством оказания помощи в соответствии со способом оказания помощи могут осуществляться как управляющая программа компьютерной программы и/или как специализированное аппаратурное обеспечение.
Компьютерная программа может храниться/распространяться на соответствующем носителе, таком как оптический носитель или твердотельный носитель, предоставляемым вместе или как часть другого аппаратурного обеспечения, но может также распространяться в других формах, таких как через Интернет или другие проводные или беспроводные системы связи.
Любые ссылочные позиции в формуле изобретения не должны истолковываться как ограничение объема изобретения.
Изобретение относится к устройству оказания помощи для оказания помощи пользователю при перемещении элемента вставки, такого как катетер, к целевому элементу внутри, например, пациента. Представление целевого элемента, представляющее целевой элемент внутри объекта в его трехмерном положении и с трехмерной ориентацией и с его размером, формируется, основываясь на предоставленном изображении целевого элемента. Кроме того, трехмерное положение элемента вставки прослеживается в то время, когда элемент вставки перемещается в целевом элементе и представление целевого элемента и прослеживаемое положение элемента вставки отображаются. Трехмерное положение и ориентация целевого элемента относительно фактического положения элемента вставки могут поэтому показываться пользователю, когда элемент вставки перемещается к целевому элементу, что позволяет пользователю более точно и быстрее перемещать элемент вставки к целевому элементу.


Группа изобретений относится к медицинской технике, а именно к средствам оказания помощи. Вспомогательное устройство для определения положения элемента вставки во время его перемещения внутри объекта к целевому элементу при проведении хирургической операции, причем вспомогательное устройство содержит блок обеспечения изображения целевого элемента, блок формирования представления целевого элемента, представляющего целевой элемент внутри объекта в его трехмерном положении и с трехмерной ориентацией и его размером. Целевой элемент содержит одно отверстие, блок формирования представления целевого элемента содержит одно кольцо, представляющее отверстие целевого элемента внутри объекта в трехмерном положении. Также вспомогательное устройство содержит блок слежения за трехмерным положением элемента вставки внутри объекта и дисплей для отображения одного кольца представления целевого элемента и кольца, представляющего отверстие элемента вставки. Хирургическая система для введения элемента вставки в объект содержит элемент вставки и вспомогательное устройство. Способ определения положения элемента вставки осуществляется вспомогательным устройством. Носитель данных для определения положения элемента вставки хранит компьютерную программу, предписывающую вспомогательному устройству выполнять этапы способа. Использование группы изобретений обеспечивает точное и быстрое перемещение элемента вставки к целевому элементу внутри объекта. 4 н. и 10 з.п. ф-лы, 14 ил.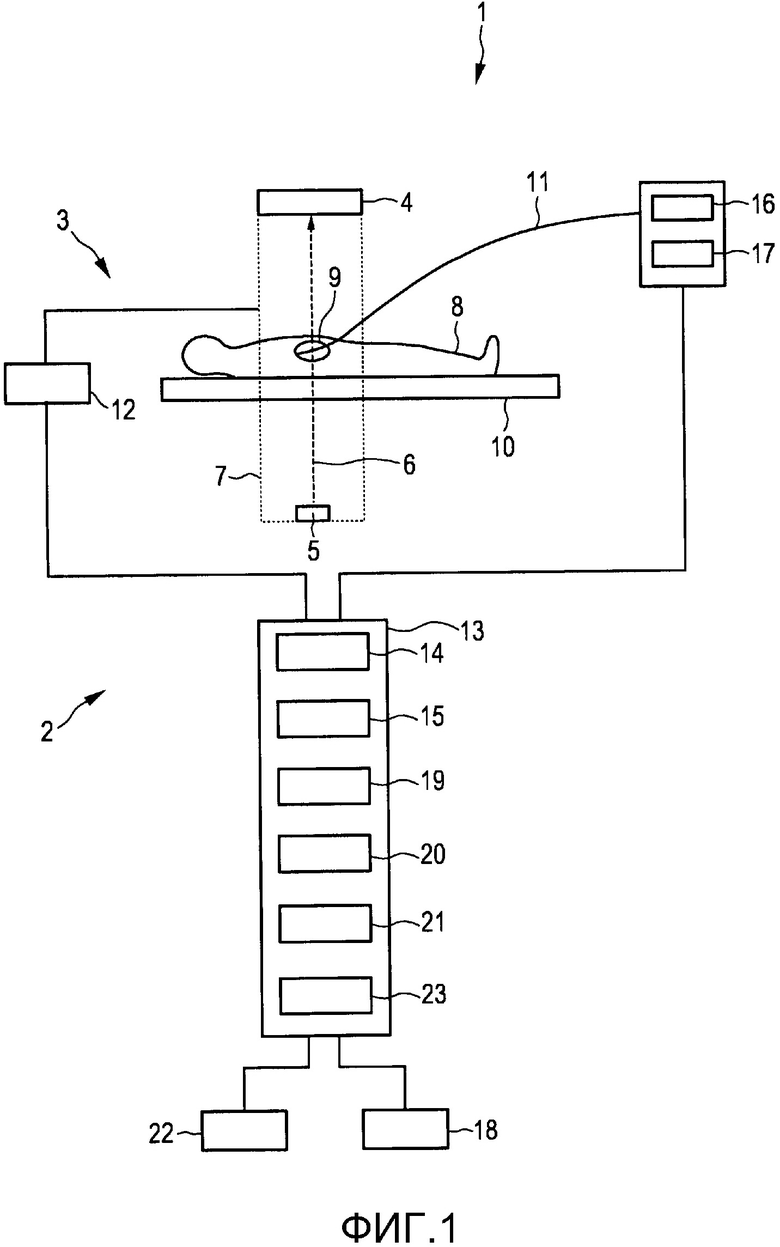
1. Вспомогательное устройство для определения положения элемента вставки во время его перемещения внутри объекта к целевому элементу при проведении хирургической операции, причем вспомогательное устройство содержит:
- блок обеспечения изображения целевого элемента для обеспечения изображения целевого элемента, показывающего целевой элемент,
- блок формирования представления целевого элемента для формирования представления целевого элемента, представляющего целевой элемент внутри объекта в его трехмерном положении и с трехмерной ориентацией и его размером, основываясь на изображении целевого элемента, причем целевой элемент содержит по меньшей мере одно отверстие, причем блок формирования представления целевого элемента выполнен с возможностью формирования представления целевого элемента, содержащего по меньшей мере одно кольцо, представляющее по меньшей мере одно отверстие целевого элемента внутри объекта в трехмерном положении, с трехмерной ориентацией и размером по меньшей мере одного отверстия целевого элемента, отличающееся тем, что содержит:
- блок слежения для слежения за трехмерным положением элемента вставки внутри объекта, когда элемент вставки перемещается к целевому элементу, причем прослеживаемый элемент вставки имеет по меньшей мере одно отверстие, и
- дисплей для отображения по меньшей мере одного кольца представления целевого элемента и по меньшей мере одного кольца, представляющего по меньшей мере одно отверстие элемента вставки.
2. Вспомогательное устройство по п. 1, причем вспомогательное устройство дополнительно содержит блок определения спроецированного положения для определения положения по меньшей мере части элемента вставки, спроецированного на плоскость кольца, определяемую кольцом представления целевого элемента, причем дисплей выполнен с возможностью отображения спроецированного положения по меньшей мере части элемента вставки внутри плоскости кольца вместе с кольцом.
3. Вспомогательное устройство по п. 1, в котором целевой элемент содержит трубкообразный элемент, и в котором блок формирования представления целевого элемента выполнен с возможностью формирования представления целевого элемента, содержащего цилиндр, имеющий трехмерное положение, трехмерную ориентацию и размер, соответствующие трехмерному положению, трехмерной ориентации и размеру трубкообразного элемента целевого элемента.
4. Вспомогательное устройство по п. 1, в котором целевой элемент содержит 3 отверстия, причем блок формирования представления целевого элемента выполнен с возможностью формирования представления целевого элемента, содержащего 3 кольца, представляющих 3 соответствующих отверстия целевого элемента внутри объекта в трехмерном положении, с трехмерной ориентацией и с размером 3 отверстий целевого элемента, причем прослеживаемый элемент вставки имеет 3 отверстия, причем дисплей выполнен с возможностью отображения 3 колец представления целевого элемента и 3 колец, представляющих 3 соответствующих отверстия элемента вставки.
5. Вспомогательное устройство по п. 1, причем вспомогательное устройство дополнительно содержит блок определения расстояния для определения расстояния между целевым элементом и элементом вставки, основываясь на сформированном представлении целевого элемента и прослеживаемом положении элемента вставки, причем дисплей выполнен с возможностью отображения определенного расстояния.
6. Вспомогательное устройство по п. 1, в котором блок слежения выполнен также с возможностью слежения за ориентацией элемента вставки внутри объекта, причем вспомогательное устройство (дополнительно содержит блок определения ориентации для определения ориентации элемента вставки относительно целевого элемента, основываясь на сформированном представлении целевого элемента и прослеживаемой ориентации элемента вставки, причем дисплей выполнен с возможностью отображения определенной ориентации.
7. Вспомогательное устройство по п. 1, причем вспомогательное устройство содержит блок обеспечения изображения объекта для обеспечения изображения объекта, показывающий по меньшей мере часть объекта, в котором дисплей выполнен с возможностью отображения представления целевого элемента и прослеживаемого положения элемента вставки на изображении объекта.
8. Вспомогательное устройство по п. 7, в котором блок слежения выполнен также с возможностью слежения за ориентацией элемента вставки и в котором блок обеспечения изображения объекта выполнен с возможностью обеспечения изображения объекта, так что его направление получения изображения зависит от прослеживаемой ориентации элемента вставки.
9. Вспомогательное устройство по п. 1, в котором блок обеспечения изображения целевого элемента выполнен с возможностью обеспечения живого изображения целевого элемента в качестве изображения целевого элемента, блок формирования представления целевого элемента выполнен с возможностью формирования живого представления целевого элемента, представляющего целевой элемент внутри объекта в его фактическом трехмерном положении и с трехмерной ориентацией и с его размером, основываясь на живом изображении целевого элемента, и дисплей выполнен с возможностью отображения живого представления целевого элемента и прослеживаемого положения элемента вставки.
10. Вспомогательное устройство по п. 1, причем вспомогательное устройство дополнительно содержит блок обеспечения зоны движения для обеспечения внутри объекта зоны, внутри которой должен только перемещаться элемент вставки, причем дисплей выполнен также с возможностью отображения зоны движения.
11. Вспомогательное устройство по п. 1, в котором блок слежения выполнен с возможностью слежения за положением элемента вставки при использовании оптического считывания формы.
12. Хирургическая система для введения элемента вставки в объект, причем хирургическая система (1) содержит:
- элемент вставки, и
- вспомогательное устройство по п. 1.
13. Способ определения положения элемента вставки во время его перемещения внутри объекта к целевому элементу при проведении хирургической операции, причем способ содержит этапы, на которых:
- обеспечивают изображение целевого элемента, показывающее целевой элемент, посредством блока обеспечения изображения целевого элемента,
- формируют представление целевого элемента, представляющее целевой элемент внутри объекта в трехмерном положении, с трехмерной ориентацией и с размером целевого элемента, основываясь на изображении целевого элемента, полученном блоком формирования представления целевого элемента, причем целевой элемент содержит по меньшей мере одно отверстие, причем блок формирования представления целевого элемента формирует представление целевого элемента, содержащее по меньшей мере одно кольцо, представляющее по меньшей мере одно отверстие целевого элемента внутри объекта в трехмерном положении, с трехмерной ориентацией и с размером по меньшей мере одного отверстия целевого элемента,
отличающийся наличием этапов, на которых:
следят за трехмерным положением элемента вставки внутри объекта посредством блока слежения, когда элемент вставки перемещается к целевому элементу, причем прослеживаемый элемент вставки имеет по меньшей мере одно отверстие, и
отображают посредством дисплея по меньшей мере одно кольцо представления целевого элемента и по меньшей мере одно кольцо, представляющее по меньшей мере одно отверстие элемента вставки.
14. Носитель данных для определения положения элемента вставки во время его перемещения внутри объекта к целевому элементу при проведении хирургической операции, хранящий компьютерную программу, содержащую средство программного кода, предписывающее вспомогательному устройству по п. 1 выполнять этапы способа по п. 13, когда компьютерная программа исполняется на компьютере, управляющем вспомогательным устройством.
| US 2006079745 A1, 13.04.2006 | |||
| US 2010222671 A1, 02.09.2010 | |||
| СОВМЕЩЕНИЕ СИСТЕМ КООРДИНАТ | 2007 |
|
RU2445007C2 |

